
Numerical Simulation of Oil Spill in the Arctic Ice-Covered Waters: Focusing on Different Ice Concentrations and Wave’s Impacts

Abstract
:1. Introduction
2. Theoretical Approach
2.1. Realizable K-Epsilon Two-Layer Model
2.2. Wave Generation Method
2.3. Overset Grids Method
3. Computational Model
3.1. Concentrations of Ice Packs
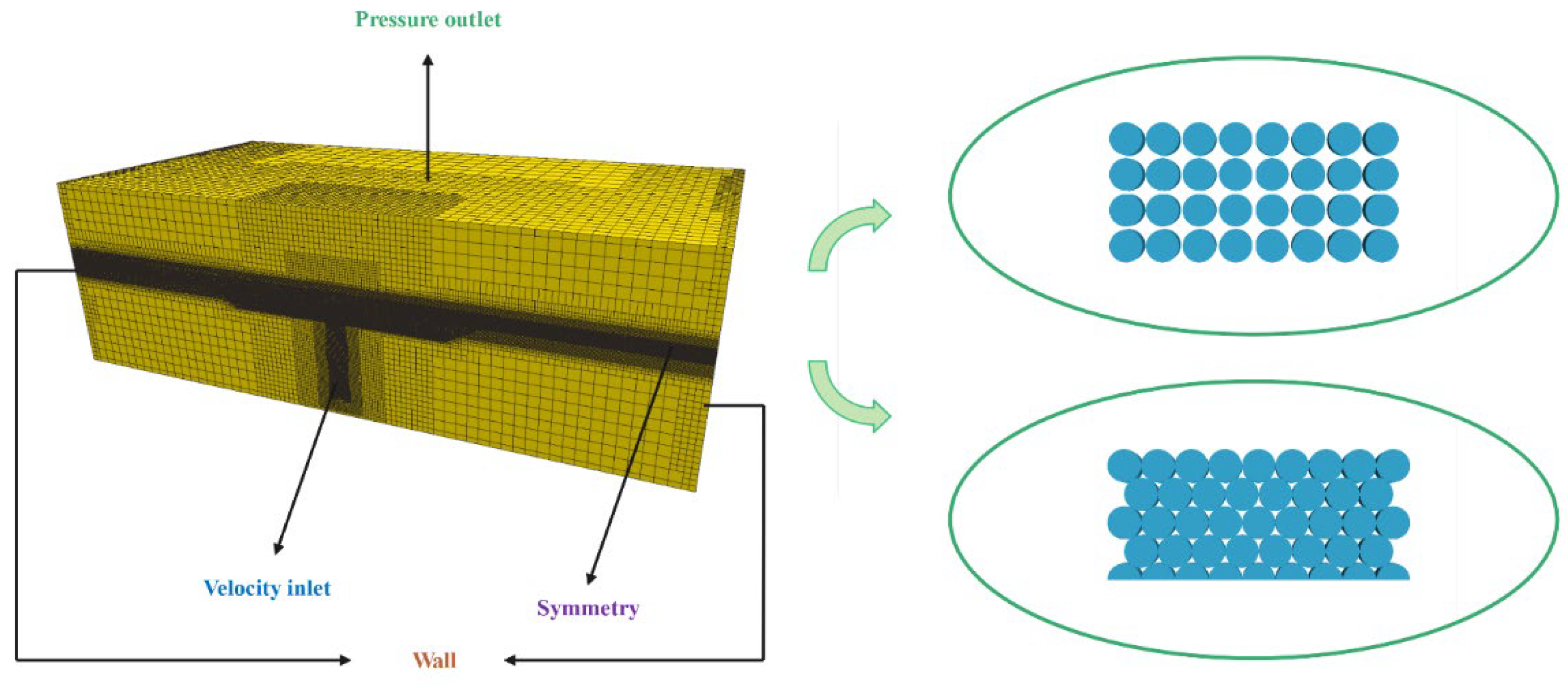
3.2. Grids and Boundary Conditions
3.3. Moving Ice
4. Results and Discussion
4.1. Validation of Oil Slick Area in Case I
4.2. Validation of Oil Slick Area in Case II
4.3. Validation of Oil Slick Area in Case III
4.4. Accuracy Analysis of Wave
4.5. Prediction of Oil Spreading in Icy Waters
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | |
| Turbulent kinetic energy | |
| Turbulent dissipation rate | |
| Differentiation | |
| Density | |
| Time | |
| Mean velocity | |
| Dynamic viscosity | |
| Turbulent eddy viscosity | |
| Model coefficients | |
| Production terms due to mean velocity gradient | |
| User-specified source terms | |
| Ambient turbulence value in the source terms | |
| Large-eddy timescale | |
| Specific timescale | |
| Damping function | |
| Average strain rate tensor | |
| Turbulent production | |
| Buoyancy production | |
| Compressibility modification | |
| Curvature correction factor | |
| Turbulent time scale | |
| Critical coefficient | |
| Enforced damping function | |
| Wave location | |
| Number of component waves | |
| Wave surface height | |
| Amplitude of the component wave | |
| Wave frequency | |
| Wave number | |
| Initial phase of the component wave | |
| Circular frequency | |
| Gravity acceleration | |
| Depth of water | |
| Assumed location of the focused wave | |
| Predetermined time | |
| Assumed focusing amplitude | |
| Classic Jonswap spectrum | |
| Wind-wave spectrum of limited wind distance | |
| Number of waves in limited wind distance | |
| Total number of waves in limited wind distance | |
| Significant wave heigh | |
| Center frequency | |
| Spectral width coefficient | |
| Center circle frequency | |
| Peak enhancement factor | |
| Function correlated with the peak enhancement factor | |
| Cell unit | |
| Target point | |
| Donor point | |
| Donor function value | |
| Interpolated function value | |
| Interpolation weight | |
| Number of total cells for all donors determined in domain |
References
- Afenyo, M.; Veitch, B.; Khan, F. A state-of-the-art review of fate and transport of oil spills in open and ice-covered water. Ocean Eng. 2016, 119, 233–248. [Google Scholar] [CrossRef]
- Wang, K.G.; Leppäranta, M.; Gästgifvars, M.; Vainio, J.; Wang, C.X. The drift and spreading of the Runner 4 oil spill and the ice conditions in the Gulf of Finland, winter 2006. Est. J. Earth. Sci. 2008, 57, 181–191. [Google Scholar] [CrossRef]
- Løset, S.; Shkhinek, K.; Gudmestad, O.T.; Strass, P.; Michalenko, E.; Frederking, R.; Kärnä, T. Comparison of the physical environment of some Arctic seas. Cold Reg. Sci. Technol. 1999, 29, 201–214. [Google Scholar] [CrossRef]
- Valdez Banda, O.A.; Goerlandt, F.; Kuzmin, V.; Kujala, P.; Montewka, J. Risk management model of winter navigation operations. Mar. Pollut. Bull. 2016, 108, 242–262. [Google Scholar] [CrossRef]
- Fingas, M.; Hollebone, B.P. Oil Behavior in Ice-Infested Waters. In Proceedings of the 36th AMOP Technical Seminar on Environmental Contamination and Response, Ottawa, ON, Canada, 4–6 June 2013. [Google Scholar] [CrossRef]
- Glaeser, J.L.; Vance, G. A study of the behaviour of oil spills in the arctic. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 30 April–2 May 1972. [Google Scholar] [CrossRef] [Green Version]
- Liu, B.X.; Zhang, W.; Han, J.S.; Li, Y. Tracing illegal oil discharges from vessels using SAR and AIS in Bohai Sea of China. Ocean Coast. Manag. 2021, 211, 105783.1–105783.9. [Google Scholar] [CrossRef]
- Otsuka, N.; Ogiwara, K.; Kanaami, K.; Takahashi, S.; Saeki, H. Experimental study on spreading of oil spilled among pack ice. Proc. Civ. Eng. Ocean. 2011, 18, 767–772. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.X.; Hong, K.Y. Physical investigation of directional wave focusing and breaking waves in wave basin. China Ocean. Eng. 2005, 19, 21–35. [Google Scholar]
- Kachulin, D.; Dyachenko, A.; Zakharov, V. Probability Distribution Functions of freak-waves: Nonlinear vs linear model. Stud. Appl. Math. 2016, 137, 189–198. [Google Scholar]
- Ning, D.Z.; Zang, J.; Liu, S.X.; Eatock Taylor, R.; Teng, B.; Taylor, P.H. Free-surface evolution and wave kinematics for nonlinear uni-directional focused wave groups. Ocean. Eng. 2009, 36, 1226–1243. [Google Scholar] [CrossRef]
- Gjøsteen, J.K.; Løset, S. Laboratory experiments on oil spreading in broken ice. Cold Reg. Sci. Technol. 2004, 38, 103–116. [Google Scholar] [CrossRef]
- Yapa, P.D.; Li, Z. Simulation of oil spills from underwater accidents I: Model development. J. Hydraul. Res. 1997, 35, 673–688. [Google Scholar] [CrossRef]
- Faksness, L.G.; Brandvik, P.J.; Daae, R.L.; Leirvik, F.; Børseth, J.F. Large-scale oil-in-ice experiment in the Barents Sea: Monitoring of oil in water and MetOcean interactions. Mar. Pollut. Bull. 2011, 62, 976–984. [Google Scholar] [CrossRef]
- Pelinovsky, E.; Talipova, T.; Kharif, C. Nonlinear-dispersive mechanism of the freak wave formation in shallow water. Phys. D Nonlinear Phenom. 2000, 147, 83–94. [Google Scholar] [CrossRef]
- Andonowati; Karjanto, N.; van Groesen, E. Extreme wave phenomena in down-stream running modulated waves. Appl. Math. Model. 2007, 31, 1425–1443. [Google Scholar] [CrossRef]
- Li, B.; Fleming, C.A. A three dimensional multigrid model for fully nonlinear water waves. Coast. Eng. 1997, 30, 235–258. [Google Scholar] [CrossRef]
- Dommermuth, D.G.; Lewis, C.D.; Tran, V.H.; Valenciano, M.A. Direct simulations of wind-driven breaking ocean waves with data assimilation. In Proceedings of the 30th Symposium on Naval Hydrodynamics, Hobart, Tasmania, Australia, 2–7 November 2014. [Google Scholar] [CrossRef]
- Deslauriers, P.C.; Martin, S.C. Behavior of The Bouchard #65 Oil Spill in The Ice-Covered Waters of Buzzards Bay. 1. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 7–10 May 1978. [Google Scholar] [CrossRef]
- Lars, A.; Höglund, A.; Axell, L.; Lensu, M.; Liungman, O.; Mattsson, J. Oil drift modeling in pack ice–sensitivity to oil-in-ice parameters. Ocean. Eng. 2017, 144, 340–350. [Google Scholar]
- Guo, W.J.; Wang, Y.X. A numerical oil spill model based on a hybrid method. Mar. Pollut. Bull. 2009, 58, 726–734. [Google Scholar] [CrossRef]
- Li, W.; Liang, X.; Lin, J.G. Mathematical Model and Computer Simulation for Oil Spill in Ice Waters Around Island Based on FLUENT. J. Comput. 2013, 8, 1027–1034. [Google Scholar] [CrossRef]
- Li, W.; Liang, X.; Lin, J.G.; Guo, P.; Ma, Q.; Dong, Z.P.; Liu, J.M.; Song, Z.H.; Wang, H.Q. Numerical Simulation of Ship Oil Spill in Arctic Icy Waters. Appl. Sci. 2020, 10, 1394. [Google Scholar] [CrossRef]
- Phuc, P.V.; Yoshida, A.; Imazu, Y.; Hasebe, M. Three dimensional multiphase flow analysis of tsunami with oil spill using VOF method. Coast. Eng. 2016, 72, 415–420. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Li, Y.; Li, C.; Wang, G.S.; Xu, S.S.; Song, J.; Zhang, S. Numerical simulation study on drift and diffusion of Dalian Oil Spill. In Proceedings of the IOP Conference Series Earth and Environmental Science, Sanya, China, 21–23 November 2016. [Google Scholar] [CrossRef]
- Zanier, G.; Petronio, A.; Armenio, V. The effect of Coriolis force on oil slick transport and spreading at sea. J. Hydraul. Res. 2017, 55, 409–422. [Google Scholar] [CrossRef]
- Tor, N.; Beegle-Krause, C.J.; Skancke, J.; Nepstad, R.; Reed, M. Improving oil spill trajectory modelling in the Arctic. Mar. Pollut. Bull. 2019, 140, 65–74. [Google Scholar]
- Aguiar, V.D.; Dagestad, K.F.; Hole, L.R.; Barthel, K. Quantitative assessment of two oil-in-ice surface drift algorithms. Mar. Pollut. Bull. 2022, 175, 113393. [Google Scholar] [CrossRef] [PubMed]
- Goda, Y. A comparative review on the functional forms of directional wave spectrum. Coast. Eng. J. 1999, 41, 1–20. [Google Scholar] [CrossRef]
- Carrica, P.M.; Fu, H.; Stern, F. Computations of self-propulsion free to sink and trim and of motions in head waves of the KRISO Container Ship (KCS) model. Appl. Ocean Res. 2011, 33, 309–320. [Google Scholar] [CrossRef]
- Faksness, L.G.; Brandvik, P.J. Distribution of water soluble components from oil encapsulated in Arctic sea ice: Summary of three field seasons. Cold Reg. Sci. Technol. 2008, 54, 106–114. [Google Scholar] [CrossRef]
- Rabault, J.; Sutherland, G.; Ward, B.; Christensen, K.H.; Halsne, T.; Jensen, A. Measurements of waves in landfast ice using inertial motion units. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6399–6408. [Google Scholar] [CrossRef]
- Mori, N.; Liu, P.C.; Yasuda, T. Analysis of freak wave measurements in the Sea of Japan. Ocean Eng. 2002, 29, 1399–1414. [Google Scholar] [CrossRef]












| Case No. | Case I | Case II | Case III |
|---|---|---|---|
| Ice concentration | 0% (no ice) | 60% | 90% |
| Oil temperature (°C) | 1 | −0.5 | −0.5 |
| Oil viscosity (mPa·s) | 95 | 190 | 145 |
| Oil density | 876 | 876 | 876 |
| Discharge rate of oil (L/s) | 0.00248 | 0.00193 | 0.00442 |
| Saline temperature (°C) | 0.2 | −0.5 | −0.5 |
| Surface tension, oil/water (N/m) | 0.0199 | 0.0205 | 0.0192 |
| Surface tension, oil/air (N/m) | 0.0229 | 0.0239 | 0.0225 |
| Injecting time (s) | 30 | 90 | 40 |
| Case No. | A | B | C |
|---|---|---|---|
| Focusing amplitude (m) | 0.03 | 0.05 | 0.08 |
| Wave steepness | 0.083 | 0.14 | 0.22 |
| Number of composition waves | 30 | 30 | 30 |
| Frequency Range (Hz) | 0.6–1.06 | 0.6–1.06 | 0.6–1.06 |
| Center frequency (Hz) | 0.83 | 0.83 | 0.83 |
| Focusing time (s) | 2 | 2 | 2 |
| Focusing location (m) | 2.5 | 2.5 | 2.5 |
| Error (%) | 1.16 | 2.96 | 4.88 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Dong, Z.; Zhao, W.; Liang, X. Numerical Simulation of Oil Spill in the Arctic Ice-Covered Waters: Focusing on Different Ice Concentrations and Wave’s Impacts. J. Mar. Sci. Eng. 2023, 11, 114. https://doi.org/10.3390/jmse11010114
Li W, Dong Z, Zhao W, Liang X. Numerical Simulation of Oil Spill in the Arctic Ice-Covered Waters: Focusing on Different Ice Concentrations and Wave’s Impacts. Journal of Marine Science and Engineering. 2023; 11(1):114. https://doi.org/10.3390/jmse11010114
Chicago/Turabian StyleLi, Wei, Zhenpeng Dong, Wanying Zhao, and Xiao Liang. 2023. "Numerical Simulation of Oil Spill in the Arctic Ice-Covered Waters: Focusing on Different Ice Concentrations and Wave’s Impacts" Journal of Marine Science and Engineering 11, no. 1: 114. https://doi.org/10.3390/jmse11010114