
Direct Underwater Sound Velocity Measurement Based on the Acousto-Optic Self-Interference Effect between the Chirp Signal and the Optical Frequency Comb


Abstract
1. Introduction
2. Measuring Principle and Experimental Setup
2.1. Principle for Time-of-Flight Measurement
2.2. Acoustic Distance-of-Flight Measurement Principle
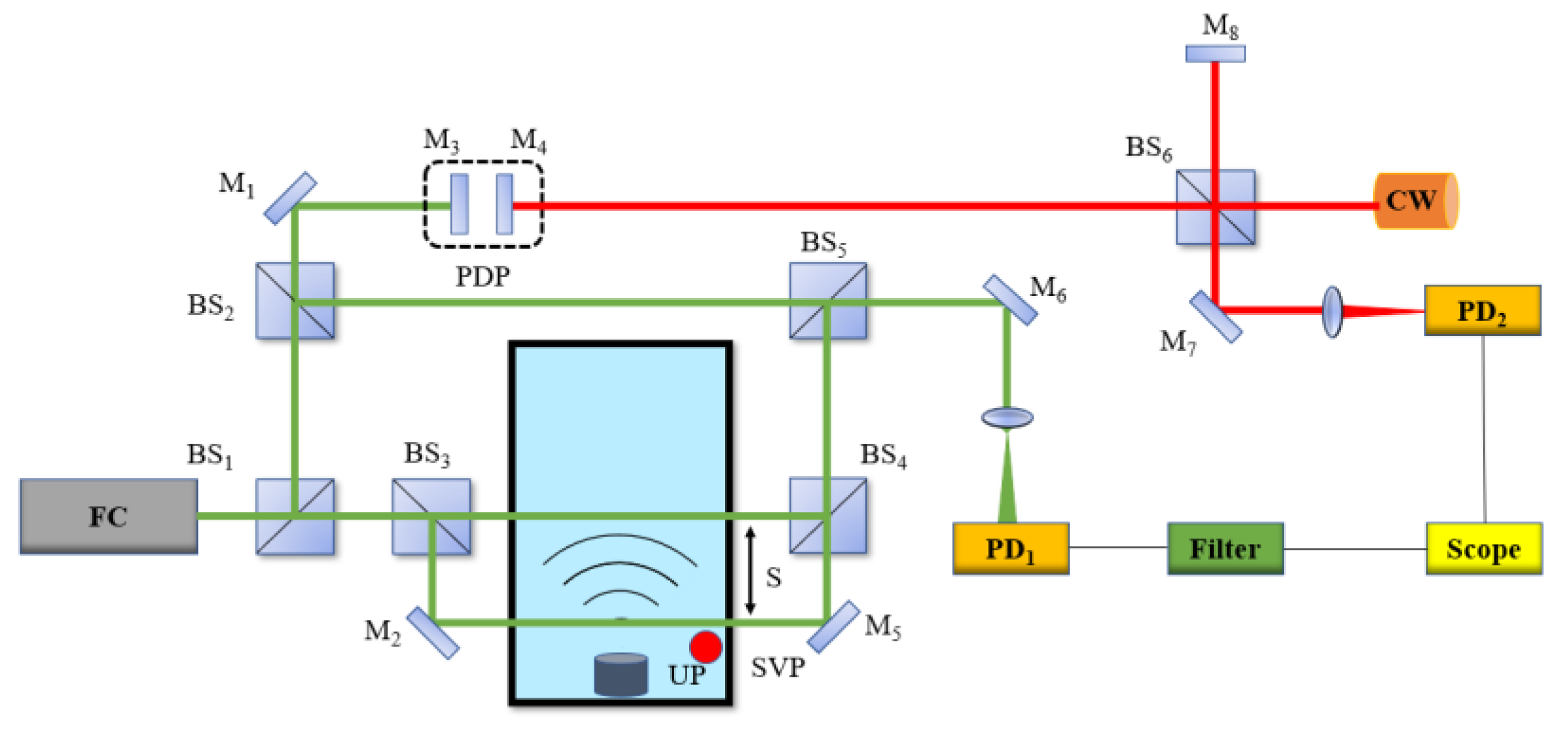
2.3. Experimental Setup
3. Experimental Results and Discussion
3.1. Experimental Results
3.2. Discussion
4. Uncertainty Analysis of Sound Speed
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dosso, S.E.; Dettmer, J. Studying the Sea with Sound. J. Acoust. Soc. Am. 2013, 133, 3223. [Google Scholar] [CrossRef]
- Ma, J.; Zhao, J. A Combined Measurement Method for the Seafloor Positioning, Navigation, and Timing Network. J. Mar. Sci. Eng. 2022, 10, 1664. [Google Scholar] [CrossRef]
- Sendra, S.; Lloret, J.; Jimenez, J.M.; Parra, L. Underwater Acoustic Modems. IEEE Sens. J. 2016, 16, 4063–4071. [Google Scholar] [CrossRef]
- Rajapan, D.; Rajeshwari, P.M.; Zacharia, S. Importance of Underwater Acoustic Imaging Technologies for Oceanographic Applications—A Brief Review. In Proceedings of the OCEANS 2022—Chennai, Chennai, India, 21–24 February 2022; pp. 7–12. [Google Scholar] [CrossRef]
- Sandy, S.J.; Danielson, S.L.; Mahoney, A.R. Automating the Acoustic Detection and Characterization of Sea Ice and Surface Waves. J. Mar. Sci. Eng. 2022, 10, 1577. [Google Scholar] [CrossRef]
- Chen, C.T.; Millero, F.J. Speed of Sound in Seawater at High Pressures. J. Acoust. Soc. Am. 1977, 62, 1129–1135. [Google Scholar] [CrossRef]
- Del Grosso, V.A. New Equation for the Speed of Sound in Natural Waters (with Comparisons to Other Equations). J. Acoust. Soc. Am. 1974, 56, 1084–1091. [Google Scholar] [CrossRef]
- Wilson, W.D. Extrapolation of the Equation for the Speed of Sound in Sea Water. J. Acoust. Soc. Am. 1962, 34, 866. [Google Scholar] [CrossRef]
- Wilson, W.D. Speed of Sound in Distilled Water as a Function of Temperature and Pressure. J. Acoust. Soc. Am. 1959, 31, 1067–1072. [Google Scholar] [CrossRef]
- Meinen, C.; Watts, D. Further Evidence That the Sound-Speed Algorithm of Del Grosso Is More Accurate than That of Chen and Millero. J. Acoust. Soc. Am. 1997, 102, 2058–2062. [Google Scholar] [CrossRef]
- Spiesberger, J.L. Is Del Grosso’s Sound-speed Algorithm Correct? J. Acoust. Soc. Am. 1993, 93, 2235–2237. [Google Scholar] [CrossRef]
- Jian, C.; Shen, Z.; Zhigang, H.; Chunjie, Q. Acoustic Velocity Measurement in Seawater Based on Phase Difference of Signal. In Proceedings of the IEEE 2011 10th International Conference on Electronic Measurement & Instruments, Chengdu, China, 16–19 August 2011. [Google Scholar]
- Meier, K.; Kabelac, S. Speed of Sound Instrument for Fluids with Pressures up to 100 MPa. Rev. Sci. Instrum. 2006, 77, 123903. [Google Scholar] [CrossRef]
- Von Rohden, C.; Fehres, F.; Rudtsch, S. Capability of Pure Water Calibrated Time-of-Flight Sensors for the Determination of Speed of Sound in Seawater. J. Acoust. Soc. Am. 2015, 138, 651–662. [Google Scholar] [CrossRef] [PubMed]
- Anderson, M.J.; Hill, J.A.; Fortunko, C.M.; Dogan, N.S.; Moore, R.D. Broadband Electrostatic Transducers: Modeling and Experiments. J. Acoust. Soc. Am. 1995, 97, 262–272. [Google Scholar] [CrossRef]
- Negita, K.; Takao, H. Superposed Pulse Echo Overlap Method for Ultrasonic Sound Velocity Measurement. Rev. Sci. Instrum. 1989, 60, 3519–3521. [Google Scholar] [CrossRef]
- Xue, B.; Wang, Z.; Zhang, K.; Zhang, H.; Chen, Y.; Jia, L.; Wu, H.; Zhai, J. Direct Measurement of the Sound Velocity in Seawater Based on the Pulsed Acousto-Optic Effect between the Frequency Comb and the Ultrasonic Pulse. Opt. Express 2018, 26, 21849–21860. [Google Scholar] [CrossRef]
- Jia, L.; Xue, B.; Chen, S.; Wu, H.; Yang, X.; Zhai, J.; Zeng, Z. Characterization of Pulsed Ultrasound Using Optical Detection in Raman-Nath Regime. Rev. Sci. Instrum. 2018, 89, 84906. [Google Scholar] [CrossRef]
- Maskell, D.L.; Woods, G.S. Adaptive Subsample Delay Estimation Using a Modified Quadrature Phase Detector. IEEE Trans. Circuits Syst. II Express Briefs 2005, 52, 669–674. [Google Scholar] [CrossRef]
- Andria, G.; Attivissimo, F.; Giaquinto, N. Digital Signal Processing Techniques for Accurate Ultrasonic Sensor Measurement. Measurement 2001, 30, 105–114. [Google Scholar] [CrossRef]
- Weng, C.-C.; Zhang, X.-M. Fluctuations of Optical Phase of Diffracted Light for Raman–Nath Diffraction in Acousto–Optic Effect. Chin. Phys. B 2015, 24, 14210. [Google Scholar] [CrossRef]
- Li, C.; Xue, B.; Yang, Z. Direct Measurement of the Sound Velocity in Water Based on the Acousto-Optic Signal. Appl. Opt. 2021, 60, 2455–2464. [Google Scholar] [CrossRef]
- Marioli, D.; Narduzzi, C.; Offelli, C.; Petri, D.; Sardini, E.; Taroni, A. Digital Time-of-Flight Measurement for Ultrasonic Sensors. IEEE Trans. Instrum. Meas. 1992, 41, 93–97. [Google Scholar] [CrossRef]
- Noels, N.; Wymeersch, H.; Steendam, H.; Moeneclaey, M. True Cramer–Rao Bound for Timing Recovery From a Bandlimited Linearly Modulated Waveform With Unknown Carrier Phase and Frequency. IEEE Trans. Commun. 2004, 52, 473–483. [Google Scholar] [CrossRef]
- He-Wen, W.; Shangfu, Y.; Wan, Q. Influence of Random Carrier Phase on True Cramer-Rao Lower Bound for Time Delay Estimation. In Proceedings of the 2007 IEEE International Conference on Acoustics, Speech and Signal Processing—ICASSP’07, Honolulu, HI, USA, 15–20 April 2007; Volume 3. [Google Scholar]
- Tavares, G.; Tavares, M. The True Crame’r-Rao Lower Bound for Data-Aided Carrier-Phase-Independent Time-Delay Estimation from Linearly Modulated Waveforms. Commun. IEEE Trans. 2006, 54, 128–140. [Google Scholar] [CrossRef]
- Fernández-Ruiz, M.R.; Costa, L.; Martins, H.F. Distributed Acoustic Sensing Using Chirped-Pulse Phase-Sensitive OTDR Technology. Sensors 2019, 19, 4368. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Y.; Zhou, J.; Lei, L.; Ran, Z.; Deng, Y.; Lin, Q. Effects of Modulation Factor on Raman-Nath Acoustooptic Diffraction Intensity Distribution. Yadian Yu Shengguang/Piezoelectr. Acoustoopt. 2013, 35, 640–642. [Google Scholar]
- Hong, L.-H.; Chen, B.-Q.; Hu, C.; Li, Z. Ultrabroadband Nonlinear Raman-Nath Diffraction against Femtosecond Pulse Laser. Photonics Res. 2022, 10, 905–912. [Google Scholar] [CrossRef]
- Raman, C.V.; Nagendra Nath, N.S. The Diffraction of Light by High Frequency Sound Waves: Part IV. Proc. Indian Acad. Sci. Sect. A 1936, 3, 119–125. [Google Scholar] [CrossRef]
- Xue, B.; Wang, Z.; Zhang, K.; Li, J.; Wu, H. Absolute Distance Measurement Using Optical Sampling by Sweeping the Repetition Frequency. Opt. Lasers Eng. 2018, 109, 1–6. [Google Scholar] [CrossRef]
- Warden, M. Precision of Frequency Scanning Interferometry Distance Measurements in the Presence of Noise. Appl. Opt. 2014, 53, 5800–5806. [Google Scholar] [CrossRef]
- Jywe, W.; Chen, C.-J. Developing a Tapping and Drilling Measurement System for a Performance Test Using a Laser Diode, Position-Sensing Detector, and Laser Interferometer. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2006, 220, 2077–2086. [Google Scholar] [CrossRef]
- Zhao, X.; Wang, Z.; Chen, Z.; Liu, Z. Study on Sound Absorption Characteristics in Seepage State of Anechoic Coating. Highlights Sci. Eng. Technol. 2022, 17, 185–191. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Pulse Width | Time-of-Flight Uncertainty |
|---|---|---|
| square pulse + threshold | 40 μs | 8.6 ns |
| mark signal + sing-around chirp + cross-correlation | / 1.5 μs | 2.0 ns 1.05 ns |
| Sources of Measurement Uncertainty | Uncertainty | Uncertainty Value |
|---|---|---|
| Distance | 887 nm | 0.0128 m/s |
| Due to air refractive index | 10−7 v m/s | 1.47 × 10−4 m/s |
| Environmental temperature uncertainty | 25 mK | |
| Environmental air pressure uncertainty | 15 pa | |
| Environmental humidity uncertainty | 2% | |
| Due to Ciddor formula | 2 × 10−8 | |
| Time-of-flight | 1.03 ns | 0.0225 m/s |
| Combined uncertainty | [(0.0128)2 + (0.0225)2 + (1.47 × 10−4)2]1/2 | 0.0269 m/s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Dong, F.; Liu, H.; Yang, X.; Li, Z.; Xue, B. Direct Underwater Sound Velocity Measurement Based on the Acousto-Optic Self-Interference Effect between the Chirp Signal and the Optical Frequency Comb. J. Mar. Sci. Eng. 2023, 11, 18. https://doi.org/10.3390/jmse11010018
Yang Z, Dong F, Liu H, Yang X, Li Z, Xue B. Direct Underwater Sound Velocity Measurement Based on the Acousto-Optic Self-Interference Effect between the Chirp Signal and the Optical Frequency Comb. Journal of Marine Science and Engineering. 2023; 11(1):18. https://doi.org/10.3390/jmse11010018
Chicago/Turabian StyleYang, Zihui, Fanpeng Dong, Hongguang Liu, Xiaoxia Yang, Zhiwei Li, and Bin Xue. 2023. "Direct Underwater Sound Velocity Measurement Based on the Acousto-Optic Self-Interference Effect between the Chirp Signal and the Optical Frequency Comb" Journal of Marine Science and Engineering 11, no. 1: 18. https://doi.org/10.3390/jmse11010018
APA StyleYang, Z., Dong, F., Liu, H., Yang, X., Li, Z., & Xue, B. (2023). Direct Underwater Sound Velocity Measurement Based on the Acousto-Optic Self-Interference Effect between the Chirp Signal and the Optical Frequency Comb. Journal of Marine Science and Engineering, 11(1), 18. https://doi.org/10.3390/jmse11010018