
Modeling and Analysis of Offshore Gangway under Dynamic Load
 and
and
Abstract
:1. Introduction
- (1)
- A dynamic model of the mixed offshore gangway under dynamic load is comprehensively established. The model is also applicable to the dynamic analysis of the personnel transfer operation process. The exactitude of the model is confirmed by joint simulation. To the best of the authors’ knowledge, the dynamic model of the offshore gangway under dynamic load is established first time in this paper.
- (2)
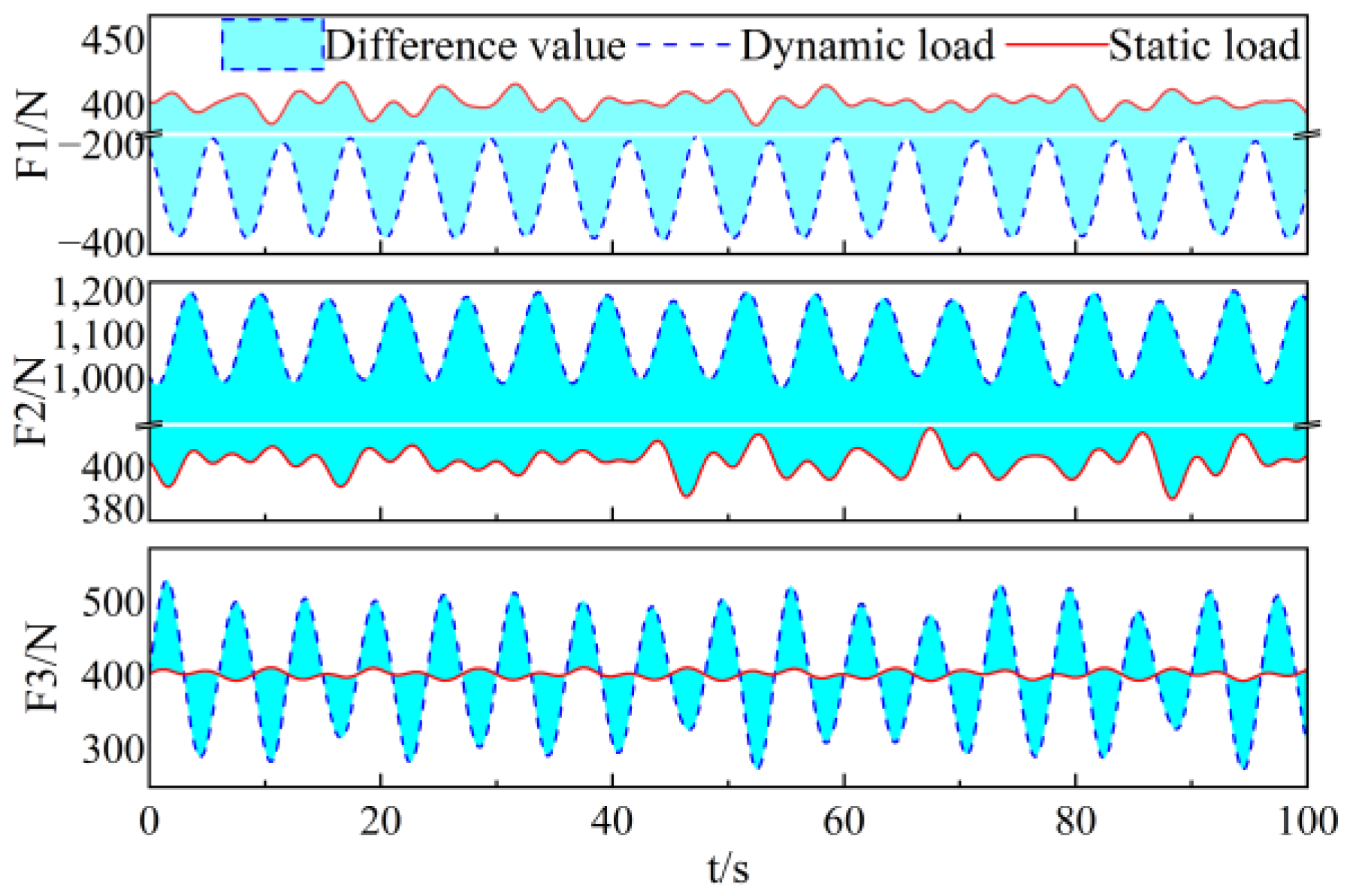
- The analysis of the dynamic model results show that the dynamic load applied to the stable platform by the transfer gangway has a significant effect on the tractive force of the stable platform’s drive support chains. The tractive force of the first drive support chain of the stable platform changes from positive to negative when the personnel transfer operation is carried out, which is worthy of follow-up study and has certain guiding significance for the practical application of the mixed structure offshore gangway.
- (3)
- Compared with no ship motion compensation, the ship motion compensation scheme can compensate for 83% of the ship motion in this paper.
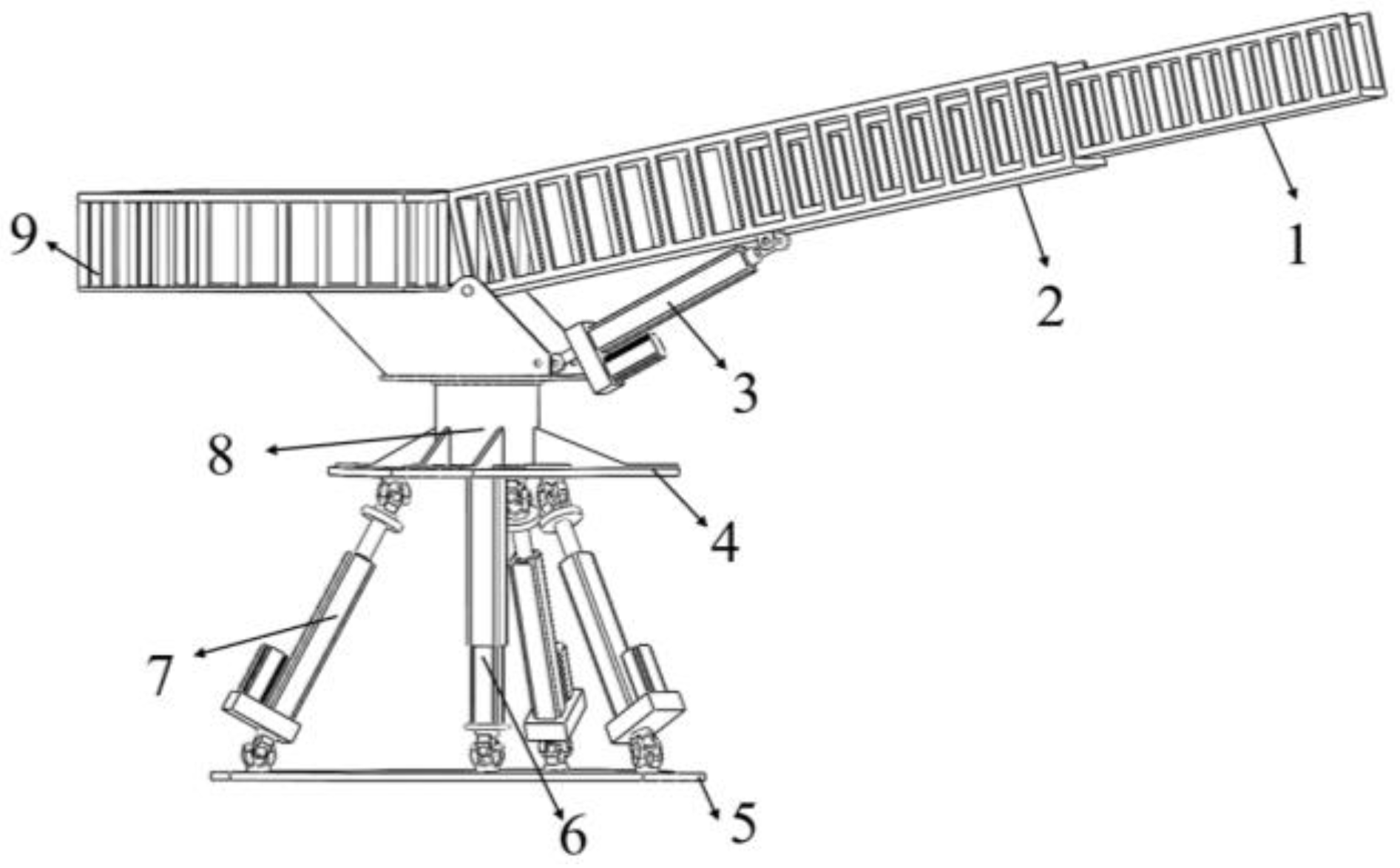
2. Structure and Spatial Framework of the Overall System
2.1. Introduction of the Organization
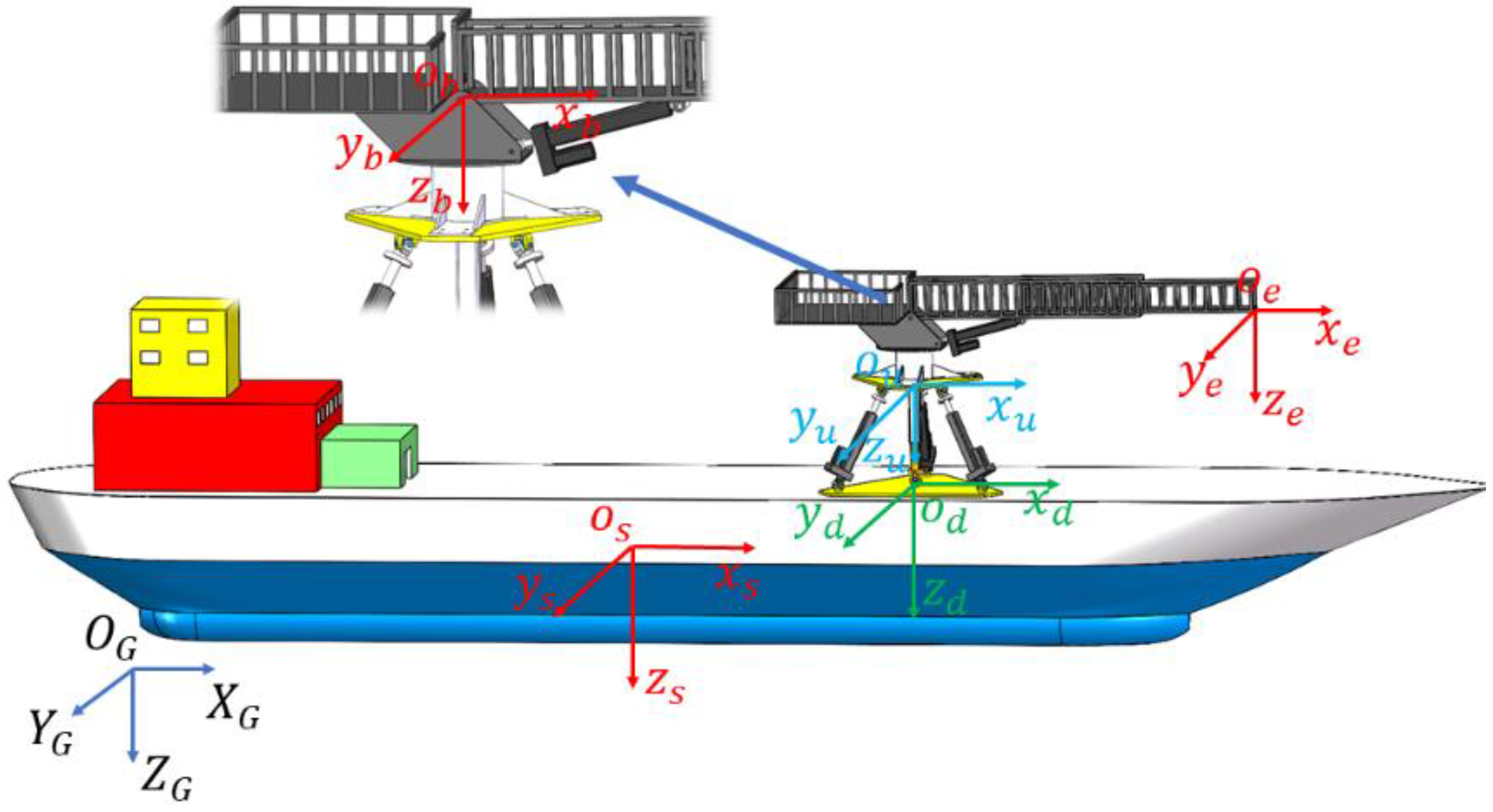
2.2. Geometrical Modeling
3. Dynamic Model
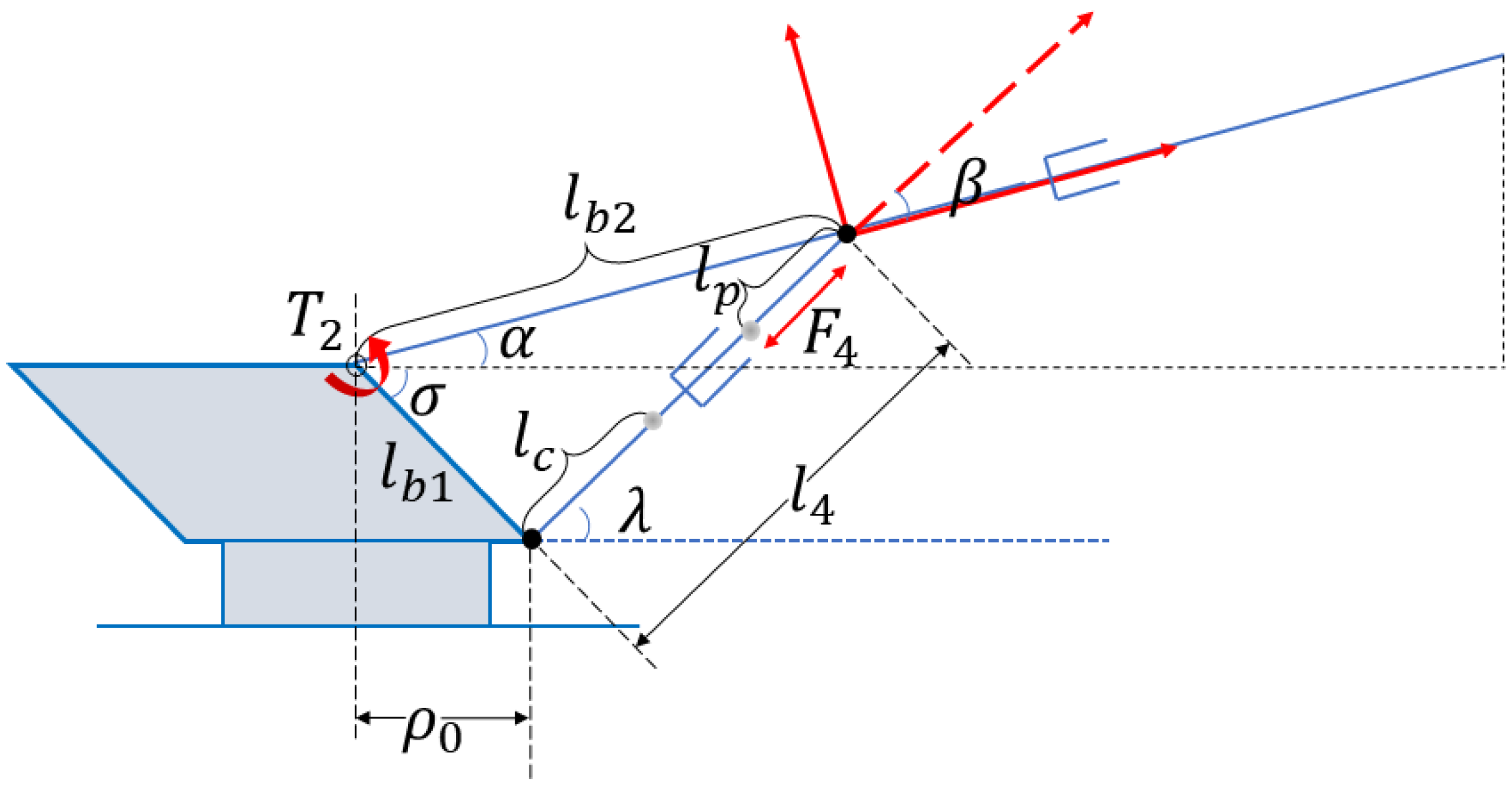
3.1. Dynamic Model of RRP Transfer Gangway
3.1.1. Analysis of Kinetic and Potential Energy of the Slewing Mechanism
3.1.2. Analysis of Kinetic and Potential Energy of the Main Arm
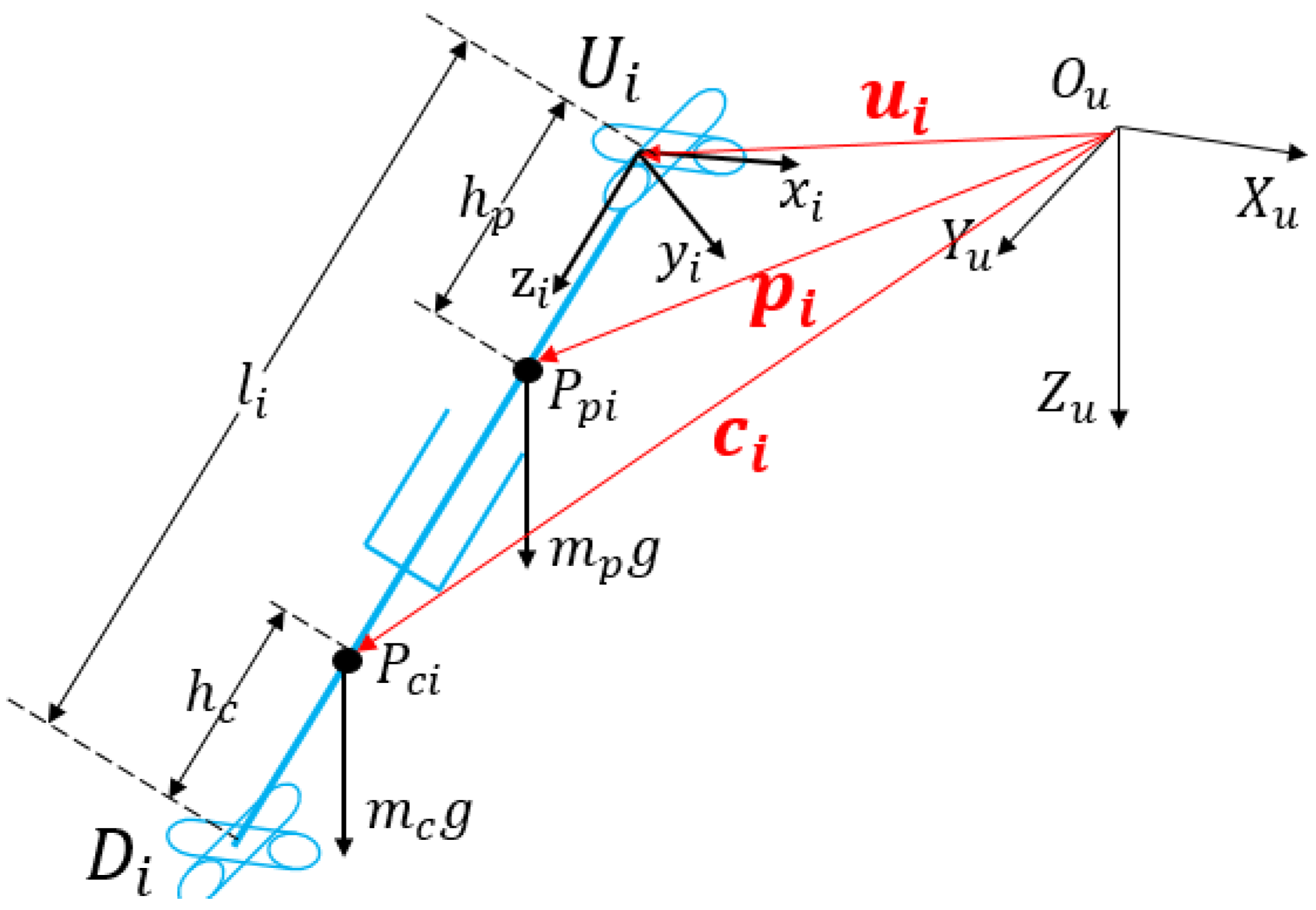
3.1.3. Analysis of Kinetic and Potential Energy of the Telescopic Arm
3.1.4. Transfer Gangway Dynamic Equations
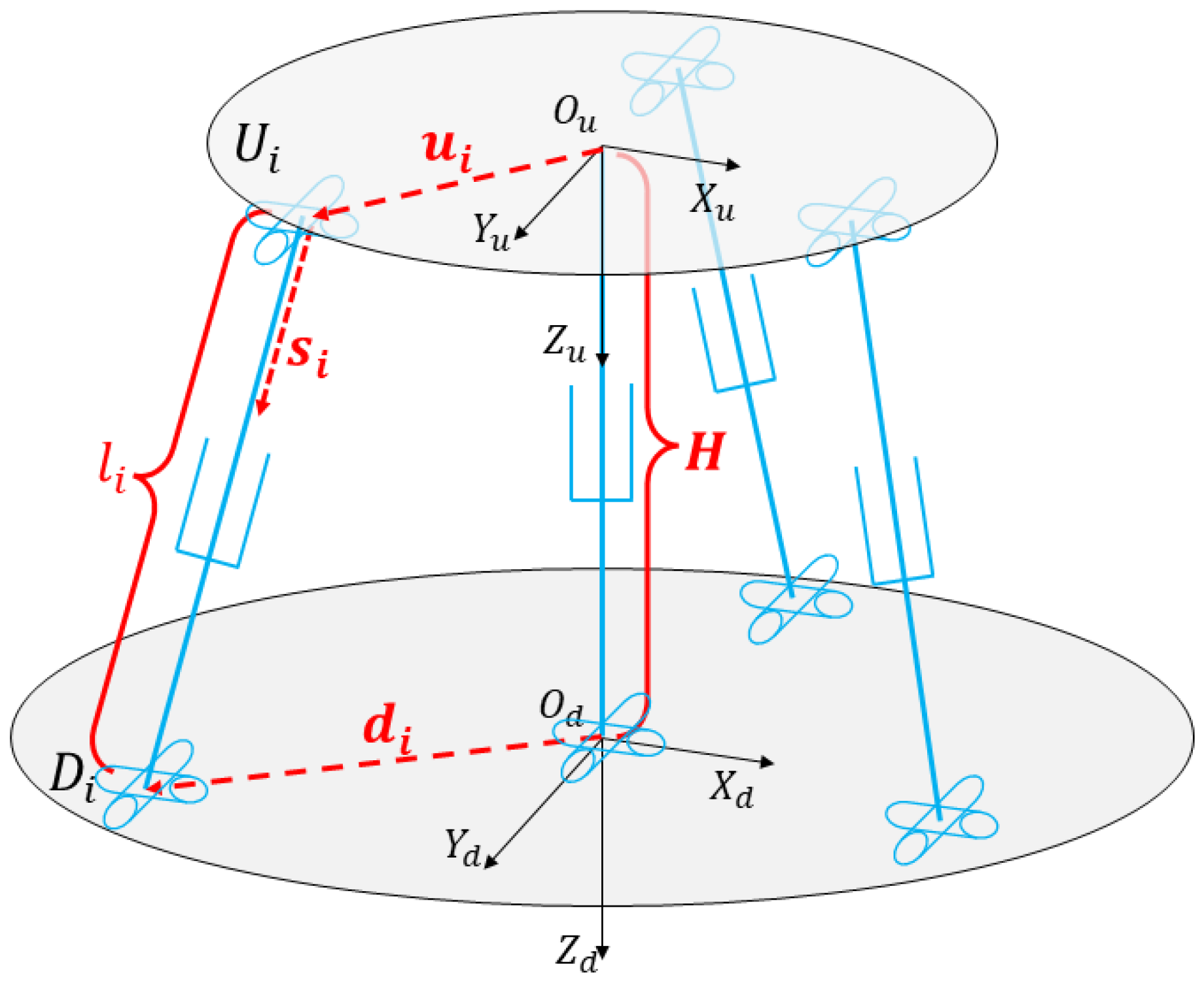
3.2. UPU/UP Stable Platform Dynamic Model
3.2.1. Dynamic Equations of Stable Platform
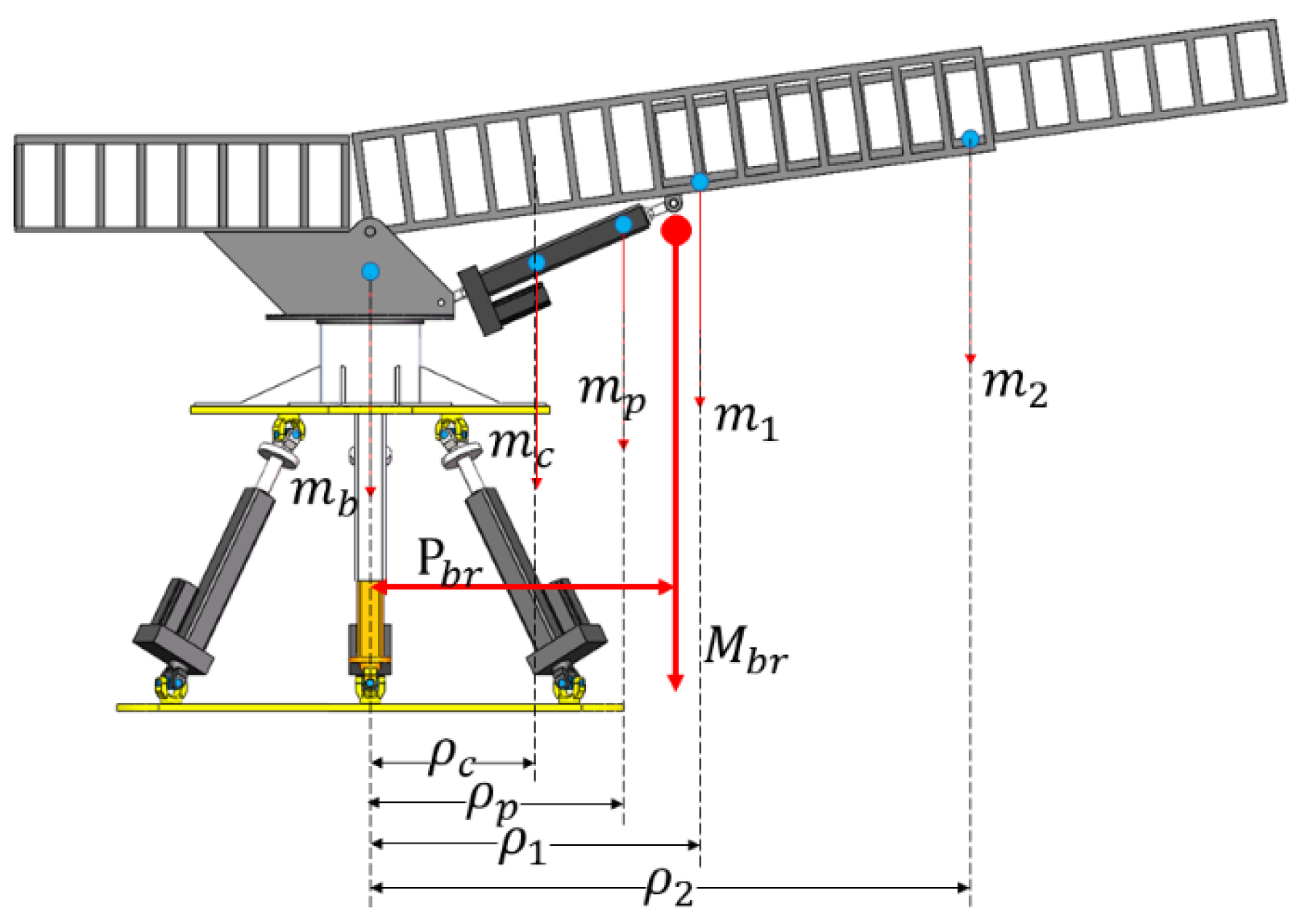
3.2.2. Dynamic Equations of Stable Platform under Dynamic Load
4. Joint Simulation and Analysis Based on Adams and Matlab
4.1. Joint Simulation and Analysis of the Stable Platform Model under Static Load
4.2. Joint Simulation and Analysis of the Stable Platform Dynamic Model under Dynamic Load
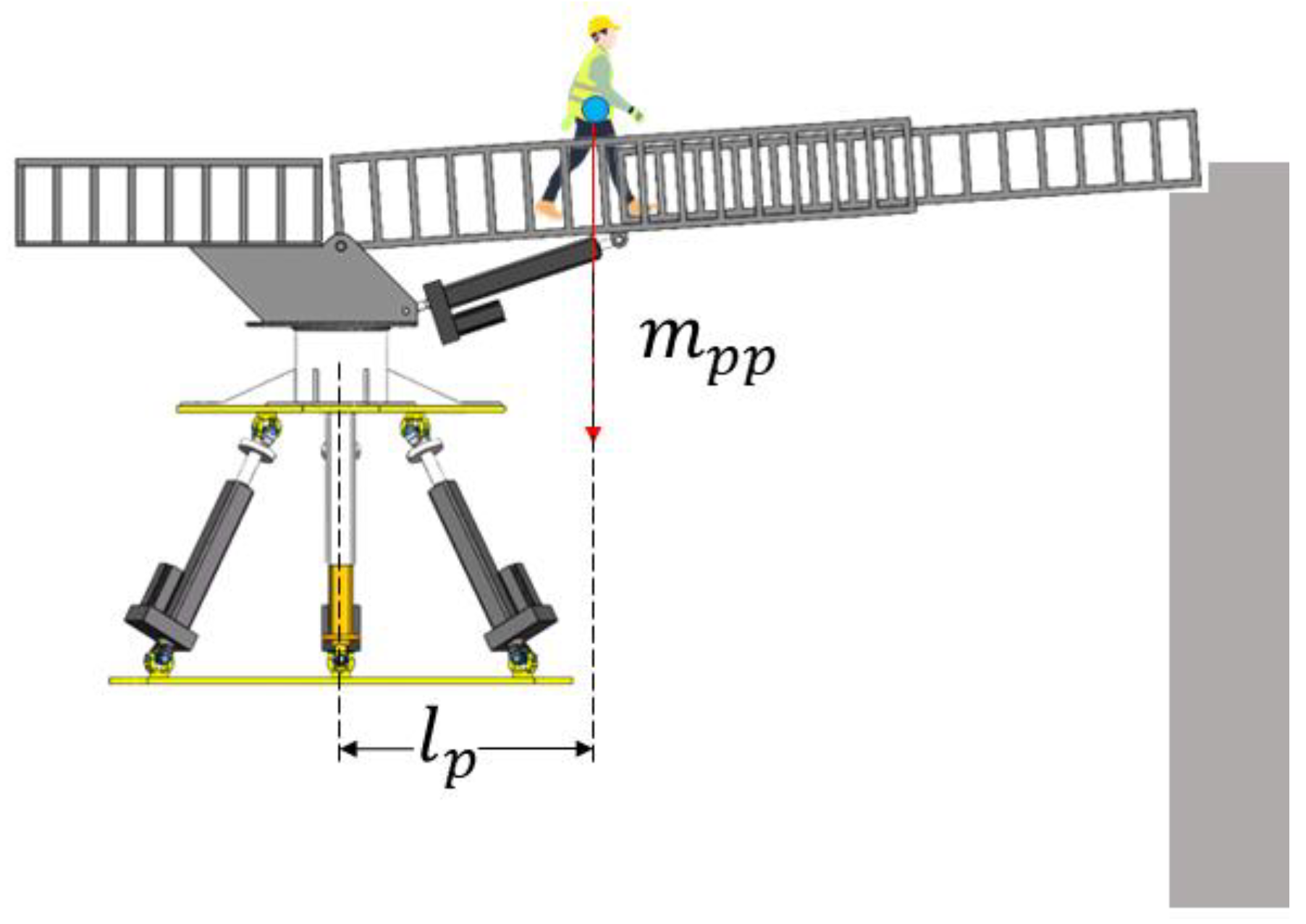
4.3. Joint Simulation and Analysis of the Stable Platform Dynamic Model during Personnel Transfer Operation
4.4. Analysis of the Compensation Effect of the Offshore Gangway
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, G.; Yu, W.; Li, Q.; Wang, H. Dynamic modeling and performance analysis of the 3-PRRU 1T2R parallel manipulator without parasitic motion. Nonlinear Dynam. 2017, 90, 339–353. [Google Scholar] [CrossRef]
- Yan, M.; Ma, X.; Bai, W.; Lin, Z.; Li, Y. Numerical simulation of wave interaction with payloads of different postures using OpenFOAM. J. Mar. Sci. Eng. 2020, 8, 433. [Google Scholar] [CrossRef]
- Cai, Y.; Zheng, S.; Liu, W.; Qu, Z.; Zhu, J.; Han, J. Adaptive robust dual-loop control scheme of ship-mounted Stewart platforms for wave compensation. Mech. Mach. Theory 2021, 164, 104406. [Google Scholar] [CrossRef]
- Liang, L.; Le, Z.; Zhang, S.; Li, J. Modeling and controller design of an active motion compensated gangway based on inverse dynamics in joint space. Ocean Eng. 2020, 197, 106864. [Google Scholar] [CrossRef]
- Dong, Q.; Guo, X.; Li, X.; Lu, W.; Yang, J. Coupled dynamics between a turret-moored fpso and a semi-submersible accommodation platform. Ocean Eng. 2021, 229, 108764. [Google Scholar] [CrossRef]
- Li, B.; Liang, H.; Chen, X.; Araujo, R. Study of telescopic gangway motions in time domain during offshore operation. Ocean Eng. 2021, 230, 108692. [Google Scholar] [CrossRef]
- Xu, Y.; Liao, H.; Liu, L.; Wang, Y. Modeling and robust H-infinite control of a novel non-contact ultra-quiet Stewart spacecraft. Acta Astronaut. 2015, 107, 274–289. [Google Scholar] [CrossRef]
- Liu, S.; Zhu, Z.; Sun, Z.; Cao, G. Kinematics and dynamics analysis of a three-degree-of-freedom parallel manipulator. J. Cent. S. Univ. 2014, 21, 2660–2666. [Google Scholar] [CrossRef]
- Wang, Z.P.; Zhao, D.F.; Zeng, G.Y. The dynamic model of a 6-DOF parallel mechanism. Mach. Des. Manuf. 2018, 1, 71–74+77. [Google Scholar]
- Muralidharan, V.; Mamidi, T.K.; Guptasarma, S.; Nag, A.; Bandyopadhyay, S. A comparative study of the configuration-space and actuator-space formulations of the Lagrangian dynamics of parallel manipulators and the effects of kinematic singularities on these. Mech. Mach. Theory 2018, 130, 403–434. [Google Scholar] [CrossRef]
- Kalani, H.; Rezaei, A.; Akbarzadeh, A. Improved general solution for the dynamic modeling of Gough–Stewart platform based on principle of virtual work. Nonlinear Dynam. 2016, 83, 2393–2418. [Google Scholar] [CrossRef]
- Enferadi, J.; Akbarzadeh Tootoonchi, A. Inverse dynamics analysis of a general spherical star-triangle parallel manipulator using principle of virtual work. Nonlinear Dynam. 2010, 61, 419–434. [Google Scholar] [CrossRef]
- Yang, X.; Wu, H.; Chen, B.; Kang, S.; Cheng, S. Dynamic modeling and decoupled control of a flexible Stewart platform for vibration isolation. J. Sound Vib. 2019, 439, 398–412. [Google Scholar] [CrossRef]
- Arian, A.; Isaksson, M.; Gosselin, C. Kinematic and dynamic analysis of a novel parallel kinematic Schönflies motion generator. Mech. Mach. Theory 2020, 147, 103629. [Google Scholar] [CrossRef]
- Wen, S.; Yu, H.; Zhang, B.; Zhao, Y.; Lam, H.; Qin, G.; Wang, H. Fuzzy identification and delay compensation based on the force/position control scheme of the 5-DOF redundantly actuated parallel robot. Int. J. Fuzzy Syst. 2017, 19, 124–140. [Google Scholar] [CrossRef] [Green Version]
- Cheng, G.; Shan, X. Dynamics analysis of a parallel hip joint simulator with four degree of freedoms (3R1T). Nonlinear Dynam. 2012, 70, 2475–2486. [Google Scholar] [CrossRef]
- Yang, X.; Wu, H.; Li, Y.; Kang, S.; Chen, B.; Lu, H.; Lee, C.K.; Ji, P. Dynamics and isotropic control of parallel mechanisms for vibration isolation. IEEE/ASME Trans. Mechatron. 2020, 25, 2027–2034. [Google Scholar] [CrossRef]
- Mendes Lopes, A.; Almeida, F. The generalized momentum approach to the dynamic modeling of a 6-dof parallel manipulator. Multibody Syst. Dyn. 2009, 21, 123–146. [Google Scholar] [CrossRef]
- Xin, G.; Deng, H.; Zhong, G. Closed-form dynamics of a 3-DOF spatial parallel manipulator by combining the Lagrangian formulation with the virtual work principle. Nonlinear Dynam. 2016, 86, 1329–1347. [Google Scholar] [CrossRef]
- Filipovic, M.; Djuric, A.; Kevac, L. The significance of adopted Lagrange’s principle of virtual work used for modeling aerial robots. Appl. Math. Model. 2015, 39, 1804–1822. [Google Scholar] [CrossRef]
- Tian, H.; Ma, H.; Xia, J.; Ma, K.; Li, Z. Stiffness analysis of a metamorphic parallel mechanism with three configurations. Mech. Mach. Theory 2019, 142, 103595. [Google Scholar] [CrossRef]
- Liu, Z.; Tao, R.; Fan, J.; Wang, Z.; Jing, F.; Tan, M. Kinematics, dynamics, and load distribution analysis of a 4-PPPS redundantly actuated parallel manipulator. Mech. Mach. Theory 2022, 167, 104494. [Google Scholar] [CrossRef]
- Cammarata, A. Optimized design of a large-workspace 2-DOF parallel robot for solar tracking systems. Mech. Mach. Theory 2015, 83, 175–186. [Google Scholar] [CrossRef]
- Pedrammehr, S.; Nahavandi, S.; Abdi, H. Closed-form dynamics of a hexarot parallel manipulator by means of the principle of virtual work. Acta Mech. Sinica-PRC 2018, 34, 883–895. [Google Scholar] [CrossRef]
- Zhao, Y.; Qiu, K.; Wang, S.; Zhang, Z. Inverse kinematics and rigid-body dynamics for a three rotational degrees of freedom parallel manipulator. Robot. Cim. Int. Manuf. 2015, 31, 40–50. [Google Scholar] [CrossRef]
- Niu, A.; Wang, S.; Sun, Y.; Qiu, J.; Qiu, W.; Chen, H. Dynamic modeling and analysis of a novel offshore gangway with 3UPU/UP-RRP series-parallel mixed structure. Ocean Eng. 2022, 266, 113122. [Google Scholar] [CrossRef]
- Wang, A.; Wei, Y.; Han, H.; Guan, L.; Zhang, X.; Xu, X. Ocean Wave Active Compensation Analysis of Inverse Kinematics for Mixed Boarding System based on Fuzzy Algorithm. In Proceedings of the 2018 OCEANS-MTS/IEEE Kobe Techno-Oceans, Kobe, Japan, 28–31 May 2018. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Md (kg) | Mp (kg) | mc (kg) | m1 (kg) | m2 (kg) | hb (m) | lb1 (m) | lb2 (m) | lm1 (m) |
|---|---|---|---|---|---|---|---|---|
| 23.34 | 6.81 | 1.47 | 32.026 | 25.229 | 0.423 | 1.52 | 0.226 | 0.768 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiu, J.; Qiu, W.; Niu, A.; Han, G.; Wang, S.; Sun, Y. Modeling and Analysis of Offshore Gangway under Dynamic Load. J. Mar. Sci. Eng. 2023, 11, 77. https://doi.org/10.3390/jmse11010077
Qiu J, Qiu W, Niu A, Han G, Wang S, Sun Y. Modeling and Analysis of Offshore Gangway under Dynamic Load. Journal of Marine Science and Engineering. 2023; 11(1):77. https://doi.org/10.3390/jmse11010077
Chicago/Turabian StyleQiu, Jianchao, Weihan Qiu, Anqi Niu, Guangdong Han, Shenghai Wang, and Yuqing Sun. 2023. "Modeling and Analysis of Offshore Gangway under Dynamic Load" Journal of Marine Science and Engineering 11, no. 1: 77. https://doi.org/10.3390/jmse11010077