

Applications, Evolutions, and Challenges of Drones in Maritime Transport

1
School of Computer Science and Artificial Intelligence, Wuhan University of Technology, Wuhan 430000, China
2
Liverpool Logistics, Offshore and Marine Research Institute, Liverpool John Moores University, Liverpool L3 3AF, UK
*
Authors to whom correspondence should be addressed.
†
These authors contributed equally to this work.
J. Mar. Sci. Eng. 2023, 11(11), 2056; https://doi.org/10.3390/jmse11112056
Submission received: 3 September 2023
/
Revised: 7 October 2023
/
Accepted: 23 October 2023
/
Published: 27 October 2023
(This article belongs to the Special Issue Seas of Change: Advancing Sustainable Maritime and Freight Transportation via Decarbonization and Digitalization in Green Shipping Corridors)
Abstract
:The widespread interest in using drones in maritime transport has rapidly grown alongside the development of unmanned ships and drones. To stimulate growth and address the associated technical challenges, this paper systematically reviews the relevant research progress, classification, applications, technical challenges, and possible solutions related to the use of drones in the maritime sector. The findings provide an overview of the state of the art of the applications of drones in the maritime industry over the past 20 years and identify the existing problems and bottlenecks in this field. A new classification scheme is established based on their flight characteristics to aid in distinguishing drones’ applications in maritime transport. Further, this paper discusses the specific use cases and technical aspects of drones in maritime rescue, safety, navigation, environment, communication, and other aspects, providing in-depth guidance on the future development of different mainstream applications. Lastly, the challenges facing drones in these applications are identified, and the corresponding solutions are proposed to address them. This research offers pivotal insights and pertinent knowledge beneficial to various entities such as maritime regulatory bodies, shipping firms, academic institutions, and enterprises engaged in drone production. This paper makes new contributions in terms of the comprehensive analysis and discussion of the application of drones in maritime transport and the provision of guidance and support for promoting their further development and integration with intelligent transport.
1. Introduction
The maritime industry has recently experienced a surge in research and applications of Unmanned Aerial Vehicles (UAVs), supported by advanced technologies, for instance, the Internet of Things, digital technology, autonomous driving, and Artificial Intelligence (AI) technology [1,2,3,4]. UAVs, commonly known as drones, are remotely or autonomously controlled aircrafts that operate without a pilot [5,6]. Their development results from the integration of various technologies, including aviation, information, network communication, cloud computing, power, AI, and flight control [7,8,9,10]. Drone applications have become increasingly significant in maritime transport, including ship inspections, marine life monitoring, search and rescue operations, and environmental assessments [11,12,13,14,15,16]. Drones can provide real-time data on ocean currents, water quality, and weather conditions, facilitating accurate and efficient decision-making. This information is essential for improving navigational safety, optimising shipping routes, and reducing environmental impact.
Currently, the use of UAVs in maritime transport has evolved into a multi-functional and diversified direction. To enhance their capabilities, specialised sensors (e.g., inertial and image sensors) have been designed and developed to be mounted on UAVs [17,18,19], leading to the emergence of various applications. Firstly, target detection algorithms such as Region-Convolutional Neural Networks (R-CNN) and You Only Look Once (YOLO) have been used to detect sea violations and mitigate risks [20,21,22,23,24]. The existing object detection algorithms for UAVs can be classified into two-stage and single-stage networks. While two-stage detection algorithms possess high accuracy, they operate slowly. In contrast, single-stage detection algorithms run faster but have a higher rate of false positives. Secondly, drones have been used for exhaust gas monitoring [18,25,26], resulting in more efficient regulatory enforcement. Conventional approaches, such as direct onboard inspections, suffer from low monitoring efficiency, low sampling ratios, and operational complexity. Thirdly, drone technology has been integrated into marine rescue platforms, successfully locating and planning paths to rescue targets [27,28,29]. The three main types of UAVs used in marine rescue are maritime search and rescue UAVs, high-endurance UAVs, and ground-effect UAVs. Finally, drones have also been utilised in evaluating marine pollution and obtaining evidence of damage to the marine environment [16,30,31,32]. Traditional satellite remote sensing monitoring has limitations regarding the high-frequency and rapid acquisition of sea area information. In summary, the integration of drone technology in maritime transport has shown strengths in ship operational efficiency, safety, and sustainability.
The primary motivation for exploring the applications, evolutions, and challenges of drones in maritime transport stems from the intersection of technological advancement and the maritime industry’s operational needs. Drones offer the potential for enhanced operational efficiency, heightened safety measures, and robust environmental monitoring in maritime operations. Furthermore, they could usher in significant economic benefits through cost savings and increased efficiency. However, it is essential to address the integration challenges to maintain regulatory compliance and ensure that the maritime sector remains forward-thinking and prepared for the future. This research aims to explain how drones can revolutionise maritime transport, bringing together technological advantages and addressing inherent challenges.
To enhance the integration of drones into maritime transport, the following research questions are investigated in this paper:
(1) How can a novel taxonomical framework of drones be formulated to optimise the prospective utilisation of drones in the maritime realm?
(2) What is the current status of drone development and research progress in the maritime industry?
(3) In the scenarios where drones are the most applied within the context of maritime transport, how do these applications impact the operational efficiency of the maritime industry?
(4) What challenges hinder the broader adoption of drones in the maritime field, and what potential solutions or strategies can be proposed to address these challenges?
Despite the considerable potential drones present for the maritime industry, a notable gap persists in the systematic review of their application, evolution, and inherent challenges. The contributions of this study include the following:
(1) Conduct a systematic literature review of drones’ current development and research progress of drone applications in the maritime industry.
(2) Establish a new classification scheme for drone research to facilitate their future applications in maritime transport.
(3) Conduct an in-depth analysis of the applications of drones in maritime transport.
(4) Identify the challenges facing the broader use of drones in maritime transport and proposing potential solutions.
The flowchart of this paper is presented in Figure 1. Section 2 describes a systematic review of the recent advancement of UAV research in maritime transport and explores the definitions and classifications of UAVs, providing readers with up-to-date information. Section 3 provides an overview of drone applications in maritime transport, categorising them and listing the technologies employed for each category. Section 4 discusses the technical challenges that drones encounter, including the future challenges in maritime transport. Section 5 concludes this paper and outlines the future trajectory of drones.
2. A Systematic Literature Review
2.1. Definition and Categories of Drones
Drones do not require a pilot and are often operated remotely. They are therefore rapidly evolving and used for both military and civilian purposes. Drones can be categorised according to their flight modes, as shown in Table 1. Fixed-wing drones offer advantages such as higher flight speeds, long flight times, and the ability to accommodate larger sensors and cameras, making them well-suited for marine patrols and tasks like marine violation identification. Rotary-wing drones have vertical take-off and landing capabilities, allowing for precise image capture and data collection, and are suitable for marine monitoring and rescue operations. Unmanned airships have long endurance and can function as command centres for port and rescue operations, while para-wing drones offer reduced weight for increased flight times and are ideal for extended missions. Fluttering drones mimic the flight patterns of birds or insects, providing covert reconnaissance capabilities and the potential for communication relays and monitoring of the marine environment.
2.2. Documentary Scientometric Analysis and Knowledge Visualisation
This study conducts a systematic literature review of drones’ applications in maritime transport based on the Web of Science (WOS) database to provide insights into their historical development and current research hotspots. The retrieval work was carried out in Dec. 2022, and the used searching strings are shown below.
‘UAV* AND maritime’,
‘drone* AND maritime’,
‘UAV* AND marine’,
‘drone* AND marine’.
After conducting an initial search on the WOS, a total of 916 results were obtained. Subsequently, journal articles published over a 20-year period from 2003 to 2022 were selected for further analysis, resulting in a refined list of 549 articles. To ensure high quality, the abstracts and keywords of these articles were further screened to ensure their relevance to the research topic, with only those pertaining to specific maritime drone applications being retained. Further, each article’s introduction, methodology, and conclusion were thoroughly reviewed to ensure their applicability, resulting in a final selection of 225 papers. For the analysis of the retrieved literature, the Citespace software (v.6.1.R3) is utilised as a research tool to identify the core research countries and research institutions, as well as to conduct the keyword co-occurrence, clustering, and literature co-citation analysis.
The result of the core research countries analysis is visualised in Figure 2, depicting the development trend over the past two decades. The analysis reveals that China, the USA, England, Australia, Korea, Canada, and Spain are the leading countries for publishing research papers on the diverse applications of drones. Furthermore, China and England have demonstrated strong collaborations with other countries in this research domain. Using node centrality as a metric, China, USA, England, and Spain have emerged as pivotal players in this research area, as shown in Table 2. Notably, the majority of the core authors are from China and England, and they have established more collaborations with authors from China than those from other countries.
The finding of the core research institutions is illustrated in Figure 3, demonstrating that most nodes are not isolated and suggesting their close collaboration. The Dalian Maritime University, Beihang University, Tsinghua University, and Pengcheng Laboratory have made significant contributions in terms of the number of publications. Additionally, these institutions have collaborated extensively with foreign countries.
The co-occurrence analysis of the keywords provides valuable insight into the latest research trends and cutting-edge areas of study. The keywords with a higher citation frequency indicate a more significant impact in the field. In this investigation, a total of 263 keywords were extracted. As depicted in Figure 4, the most frequently cited keywords include ‘UAVs’, ‘remote sensing’, ‘computer vision’, ‘marine litter’, and ‘maritime communication’, highlighting the growing importance of drone applications in the maritime industry. Table 3 presents the high-frequency keywords for each year according to Figure 4. The analysis reveals that research on UAVs in the maritime field commenced in 2008. In recent years, keywords such as ‘deep learning’ and ‘maritime communication’ have demonstrated relatively high occurrence frequency and centrality, indicating they are currently the research hotspots.
The clustering function in the Citespace is used to identify nine keyword clusters, as illustrated in Figure 5. The top five clusters are presented in detail in Table 4. The primary phase in the Citespace tallies up the keyword frequencies and their associations. Subsequently, the Log-Likelihood Ratio (LLR) test algorithm within the Citespace groups the related keywords. According to the LLR algorithm, the keywords in the same cluster are given a value. The keywords with the peak value stand as the emblematic category for that cluster. As illustrated in Figure 5, the foremost five clusters are the following: cluster #0 marine vehicles, cluster #2 marine robotics, cluster #3 atmospheric modelling, cluster #4 unmanned aerial vehicles, and cluster #5 central Tyrrhenian sea. This underscores that over the past 20 years, maritime UAV research has concentrated on the aforementioned areas. Based on Figure 5, it is apparent that cluster #0 marine vehicles is immediately associated with cluster #1 remote sensing, cluster #2 marine robotics, and cluster #4 unmanned aerial vehicles. Additionally, the research direction in this field is primarily focused on marine vehicles. Moreover, the UAV maritime field is being shifted towards cluster #1 remote sensing, cluster #2 marine robotics, cluster #3 atmospheric modelling, cluster #4 unmanned aerial vehicles, and cluster #7 unmanned aerial systems.
The co-citation analysis is a valuable technique for identifying common themes and evolutionary dynamics in a specific field. Figure 6 illustrates that the investigation into drones in the maritime sector commenced between 2016 and 2020, initially concentrating on floating litter and intertidal macroalgae. Subsequently, drone-based studies employing multispectral cameras have proved to be an effective method for monitoring beach litter. Table 5 provides detailed information on the referenced documents. The cited literature indicates that the early applications of drones in the maritime industry were centred around marine litter monitoring. Furthermore, the academic community exhibits a keen interest in collaboration in marine litter detection. However, the number of researchers in other fields seems relatively limited.
2.3. Research Gaps and Solutions
In the current maritime research field, there are several research gaps related to the study and implementation of drones.
(1) The absence of comprehensive research and reviews on drones in the maritime sector.
There is a lack of specialised reviews on drone applications, particularly in areas such as ship inspection (e.g., ships’ hulls and hard-to-reach regions), ocean monitoring, and disaster relief. This scarcity hinders a comprehensive understanding of the current state of drone applications in maritime operations. To bridge this gap, this paper undertakes a systematic review of research progress and the relevant literature to provide insights into the existing drone applications in the maritime sector.
(2) The lack of a complete application system for UAVs in the maritime field.
The applications of UAVs in areas such as route exploration, ocean monitoring, and search and rescue currently lack coherence and are scattered. There is a need for further improvement and enhancement of UAV applications in order to promote coordinated development. To address this, a comprehensive overview of UAV applications in different maritime fields is necessary. This study aims to provide a review and analysis of UAV applications, contributing to a better understanding of their potential and facilitating their effective utilisation in the maritime domain.
(3) The technical difficulties, challenges, and possible solutions encountered by UAVs in maritime applications.
The complex maritime environment, harsh weather conditions, and strong electromagnetic interference present significant challenges to the application of UAVs in the maritime sector. Moreover, technical limitations, particularly in obstacle avoidance capabilities, further restrict their usage. To address these gaps, Section 3 and Section 4 of the paper focus on the evolution of drone applications in maritime transport and the challenges associated with using drones in this context. These sections aim to provide insights and potential solutions to overcome the obstacles faced by UAVs in maritime applications.
3. Development and Different Applications of Drones in Maritime Transport
Drones possess exceptional mobility, robust monitoring capabilities, and extensive coverage, enabling them to be highly suitable for deployment in the marine sector. This section first highlights the development trends of drones and relevant regulations over time. Then, it introduces the different applications of drones in the sectors of fast-growing interest, including maritime rescue (i.e., Section 3.2), marine safety and surveillance (i.e., Section 3.3), marine environment (i.e., Section 3.4), marine communications (i.e., Section 3.5), military and naval (i.e., Section 3.6), anti-piracy (i.e., Section 3.7), augmented reality (i.e., Section 3.8), and cargo loading and uploading (i.e., Section 3.9), as well as the associated methods.
3.1. The Development Trends of Drones over Time
A timeline diagram showcasing the progression of regulations and application development of drones is depicted in Figure 7. The timeline diagram reveals the evolving trend of drone applications. Initially, drones were primarily utilised for marine rescue operations and quickly expanded to encompass various other areas, including marine environmental monitoring, marine communications, and marine navigation.
Starting from the conceptual proposal of the ‘Queen Bee’ drone in 1934 and leading up to the introduction of the ‘European Union Unmanned Aircraft Systems Regulations’ in 2019, the drone industry has experienced significant growth over a long period of time. Throughout this development, relevant regulations have been established at both the national and international levels to govern drone operations and ensure safety and responsibility.
In summary, the regulations that have been put in place over the past century have played a vital role in promoting safe and responsible drone operations on a global scale.
3.2. Marine Rescue
3.2.1. Delivery of Relief Supplies
Recent statistics from the International Maritime Organization (IMO) database reveal that between 2014 and 2019, the global marine casualties and incidents were counted as 2664 incidents annually on average. However, the advent of the coronavirus in 2020 resulted in a decrease in marine casualties and incidents, with the number dropping to 2547. Nevertheless, in 2021, the number rebounded to 2637. Such data highlight the ongoing high frequency of maritime accidents worldwide [61,62,63]. In such a circumstance, the prompt delivery of relief supplies to inaccessible accident sites becomes paramount for saving lives. Drones have proven to be an effective tool for delivering these supplies to disaster sites, ensuring their timely arrival and alleviating the burden on rescue workers [64]. By facilitating the transportation of food, medical supplies, and other emergency resources, drones play a vital role in providing relief assistance in the maritime sector [65].
3.2.2. Locating Rescue Targets
In the event of a marine accident, the primary focus is on rescuing survivors [66]. Extensive research has demonstrated that drones can play a crucial role in this regard by swiftly identifying and relaying the precise locations of survivors to command centres and rescue teams [67,68]. This utilisation of drones significantly enhances the efficiency of rescue operations. Moreover, employing drones can enhance safety for both the survivors and rescue personnel as it reduces the necessity for them to enter the water [39]. Although it is still necessary to address the associated legal concerns, the use of drones for maritime rescue missions emerges as an efficient and cost-effective solution, offering substantial potential for improving the likelihood of successful outcomes.
3.2.3. Search Path Planning
Efficient search and rescue are critical when dealing with maritime accidents. However, the current use of large search and rescue equipment in maritime Synthetic Aperture Radar (SAR) sometimes proves to be inefficient [39,69]. To improve search efficiency, the integration of drones into large rescue equipment has been proposed, allowing for the collaborative modelling of the accident area and the optimisation of search paths for both equipment and rescuers [70].
As an example, the integration of advanced sensors and cameras onto drones can facilitate the rapid scanning of expansive open water areas, enabling the identification of potential targets or points of interest [27]. The data gathered by the drones can subsequently be employed to generate a digital map of the accident site, which in turn can be leveraged to optimise the search paths for other equipment and rescuers [68,71]. The integration of drones and path planning algorithms in conjunction with traditional SAR equipment holds significant potential for improving SAR operations at sea.
3.3. Marine Safety and Surveillance
3.3.1. Port Supervision and Facilities Maintenance
Efficient port management is essential for ensuring a port’s capacity to handle cargo effectively. However, the challenging environments in which many port facilities are situated often make inspection and maintenance a daunting task. To address this challenge, drones are employed to actively monitor ports and maintain facilities, streamlining the port supervision and maintenance processes [72].
Drones have proven to be highly effective in monitoring the perimeter of ports, swiftly detecting any unauthorised access attempts or suspicious activities. This enables security personnel to respond promptly to potential threats, preventing incidents before they occur and bolstering overall port security [73,74].
In addition, drones can be employed for asset management and inventory control in ports [72,75]. Equipped with high-quality imaging capabilities, drones assist in monitoring the flow of goods in and out of port, mitigating the likelihood of lost or misplaced shipments. Moreover, drones can swiftly and accurately perform inventory checks, identifying any discrepancies between physical inventory and records.
Furthermore, the use of drones for port supervision and maintenance can enhance safety by minimising the need for workers to operate at heights or in hazardous environments. Drones can aid in inspecting and surveying hard-to-reach areas, such as crane arms, cargo stacks, and roofs, identifying potential safety hazards such as cracks or corrosion [76,77]. This proactive approach allows port operators to address safety issues before they escalate, preventing accidents and equipment failures.
In summary, drones offer a promising solution to enhance safety, efficiency and cost-effectiveness in port management and maintenance. By actively monitoring ports, assisting with inventory control, and conducting inspections in hazardous areas, drones contribute significantly to the smooth operation and security of port facilities.
3.3.2. Marine Patrol
With the continuous growth of global trade, ships play a vital role in maritime transport [78]. However, the inherent risks associated with this industry cannot be overlooked. To tackle these challenges, drones offer a valuable solution by providing real-time data on ships and maritime activities [79]. These data are analysed to identify various types of vessels and monitor their movements, enabling law enforcement agencies to intervene and prevent illegal activities such as smuggling, piracy, and illegal fishing [80].
Moreover, drones excel at covering vast areas of water efficiently, making them a valuable asset for monitoring the health of marine ecosystems [20]. By gathering valuable information, drones contribute to ongoing conservation efforts and aid in promoting sustainable resource management [81,82]. This enhanced capability provided by drones allows maritime law enforcement agencies to protect the oceans effectively and ensure their long-term sustainability [83].
As a result, drones play a crucial role in addressing the risks associated with maritime transport. By providing real-time data and enabling the efficient monitoring of ships and maritime activities, drones empower law enforcement agencies to combat illegal activities [84]. Additionally, their ability to survey large areas of water contributes to the preservation of marine ecosystems, fostering sustainable practices in resource management [85].
3.3.3. Vessel Inspections
Vessel inspections are crucial to ensure their safety and seaworthiness [72]. However, traditional methods involving close-range inspections by surveyors when ships are docked often entail high costs, time, and potential risks. Scaffolding is commonly employed to access hard-to-reach areas, further complicating the process [21]. In contrast, drones present a safer and more efficient solution.
By utilising drones, ultra-high-definition images of a vessel’s structural condition can be transmitted in real-time to ground monitoring stations, enabling surveyors to remotely assess the vessel [86]. This remote assessment eliminates the need for any physical assessment and exposure to danger, thereby reducing costs and enhancing safety.
Additionally, drones offer the advantage of conducting inspections even in challenging weather conditions. Traditional inspection methods can be time-consuming as surveyors need to manually inspect every area of a whole vessel. Conversely, drones can swiftly cover large areas of the vessel, providing high-quality data for analysis [87,88]. This significantly improves the efficiency of the inspection process.
Drones can revolutionise vessel inspections by providing a safer and more efficient alternative to traditional methods. Through the real-time transmission of high-definition images, remote assessments can be conducted, eliminating the need for scaffolding and reducing costs. Furthermore, drones’ ability to operate in difficult weather conditions and cover large areas expedites the inspection process, enhancing overall efficiency.
3.4. Marine Environment
3.4.1. Ship Port Exhaust Monitoring Forensics
The maritime transport industry is facing increasing pressure to mitigate ship emissions for the Net Zero goal by the IMO [25]. However, conventional methods involving ship exhaust sniffing sensors often suffer from drawbacks such as bulkiness, heaviness, and high costs. Drones have emerged as a viable and cost-effective alternative for screening vessel exhausts to ensure compliance with emission regulations [31].
By leveraging drones, the cost and complexity associated with traditional monitoring methods can be significantly reduced [30]. Drones equipped with high-resolution cameras and gas sensors can provide real-time data on ship emissions, enabling the identification of pollution sources and instances of non-compliance [89,90]. This information can then be utilised to enforce regulations and minimise the impact of shipping activities on the marine environment. Moreover, drones possess the capability to cover expansive areas swiftly and effortlessly, offering a cost-effective solution to exhaust monitoring without the necessity for expensive equipment or infrastructure [91,92]. As a result, the utilisation of drones for ship exhaust monitoring presents an efficient and effective approach to mitigating marine pollution caused by ships.
3.4.2. Coastal Zone Ecological Monitoring
The global population’s growing concentration in coastal areas has placed significant pressure on the environment and coastal ecosystems [30]. The situation is further exacerbated by the impacts of climate change, which disrupts natural organisms and ecosystems in these regions [93]. In response to the challenges faced by Marine Protected Areas (MPAs) in conserving and safeguarding marine biodiversity and ecosystems, the use of drones has emerged as a promising solution to improving the required and relevant monitoring operations and management [32].
Drones have numerous advantages when it comes to MPA management. Equipped with high-resolution cameras and sensors, drones can gather detailed data on marine habitats, species distributions, and ecosystem dynamics [94]. This wealth of information provides valuable insights into the condition and status of protected areas, enabling informed decision-making and proactive measures to protect vulnerable ecosystems.
One of the key benefits of using drones in MPA management is their ability to conduct real-time monitoring of MPA boundaries [95]. Drones can cover large areas and capture aerial imagery, facilitating the detection of encroachments or illegal activities within the protected zones. This capability allows for swift response and enforcement actions, serving as a deterrent against illegal fishing, poaching, and unauthorised activities.
Additionally, drones can access and survey challenging marine areas that are typically inaccessible or hazardous for humans [96,97]. This enables data collection from remote or neglected locations, providing a comprehensive understanding of species populations, habitat conditions, and environmental changes.
Therefore, the use of drones in monitoring and managing MPAs offers great potential for conserving and protecting marine biodiversity and ecosystems. Drones can help address resource limitations, enhance surveillance efforts, and provide critical data for informed decision-making. By harnessing these technological advancements, MPAs can effectively tackle the growing pressures from the concentration of the global population in coastal areas and the impacts of climate change. Ultimately, this promotes the sustainable management and long-term preservation of our coastal and marine environments.
3.5. Marine Communications
While the existing marine infrastructure generally meets the communication needs of the shipping industry, there are occasions where shore-based wireless communication facilities may fall short, particularly during emergencies. In such cases, drones offer an effective solution to enhancing the quality of wireless communication [98]. By being operated at high altitudes, drones can provide extended coverage and establish a reliable communication network between ships and between ships and the shore. This capability ensures that communication remains uninterrupted, even in remote or challenging environments. Additionally, drones have the ability to transmit real-time video and audio data during emergencies, equipping rescue teams with critical information to make prompt and well-informed decisions [99]. Furthermore, drones are equipped with a diverse range of communication equipment, including radios, antennas, and satellite links. This enables them to offer various communication services to ships at sea, ensuring reliable connectivity and facilitating effective communication between vessels and onshore facilities [100].
The continuous technological advancements in the field of drones have further enhanced their appeal as communication nodes in the maritime industry. With improved capabilities and features, drones have become an increasingly viable option for fulfilling communication requirements in challenging situations and emergencies.
While shore-based wireless communication facilities in the maritime industry generally suffice, drones play a crucial role in augmenting communication quality during emergencies. Their ability to provide extended coverage, transmit real-time data, and offer diverse communication services makes them an effective and appealing solution for enhancing wireless communication in the maritime sector.
3.6. Military and Naval Applications
Drones have become an integral part of military and naval operations. They are used for surveillance, reconnaissance, and intelligence gathering purposes. Military drones, such as UAVs, provide real-time aerial imagery, video footage, and sensor data, helping armed forces monitor enemy activities, identify targets, and assess battlefield conditions. They can also be equipped with weapons for offensive operations. Surveillance is a fundamental aspect of military strategies, and drones excel in this domain. Due to their flexibility, low-fuel drones and high-fuel drones alternate missions. In addition, adding refuelling drones to military missions aims to allow drones to continue to perform missions [101].
In terms of military reconnaissance, the sensors installed on drones are airborne mobile sensors. They carry out the cooperation of static ground sensors and airborne mobilesensors to effectively expand the detection area of drones [102]. The aerial perspective offered by drones enables military commanders to gain a comprehensive understanding of the battlefield, identify potential threats, and develop appropriate response strategies [103].
In addition to surveillance and reconnaissance, drones play a crucial role in intelligence gathering. Military intelligence gathering has relied on human-controlled aerial vehicles in the past, but with the advent of more and more autonomous systems, it is increasingly important to use the situational awareness capabilities of drones for intelligence gathering [104]. This intelligence is essential for understanding enemy tactics, identifying vulnerabilities, and formulating effective countermeasures.
Moreover, the integration of weapon systems with military drones has transformed the nature of warfare. Armed drones, commonly known as unmanned combat aerial vehicles (UCAVs), possess the capability to launch precision strikes on enemy targets. This offensive capability enables armed forces to engage enemy forces, disrupt their operations, and neutralise threats while minimising collateral damage and reducing the risk to friendly forces [105]. Drones have become indispensable assets in military and naval applications. Their contributions to surveillance, reconnaissance, intelligence gathering, and offensive operations have significantly enhanced the capabilities of armed forces.
3.7. Anti-Piracy Applications
Drones are increasingly employed in maritime security to combat piracy. They can be used to patrol coastlines and shipping routes, monitor suspicious activities, and provide early warning systems to prevent pirate attacks.
Currently, piracy surveillance at sea is conducted using a combination of Automatic Identification Systems (AISs), Coastal Radar Systems (CRSs) and Long Range Cameras (LRCs). The above monitoring methods are not enough in terms of adaptability to dynamic events or simple and effective path coordination ability. UAV swarm monitoring is emerging as an attractive countermeasure that increases the flexibility of traditional methods and improves mission success [106]. Therefore, the integration of drones into maritime security strategies has revolutionised the fight against piracy. Their ability to patrol extensive areas, monitor suspicious activities, and provide early warnings has proven instrumental in preventing and deterring pirate attacks.
3.8. Augmented Reality Applications
Drones can enhance augmented reality experiences by acting as aerial platforms for Augmented Reality (AR) applications in maritime. By integrating drones with AR technology, users can view real-time augmented views of their surroundings from an aerial perspective. This will be particularly helpful in the remote control of autonomous ships.
A significant advantage of using drones with AR is witnessed as it provides a unique perspective that cannot be obtained easily using other means from the ground. These drones, equipped with advanced cameras and sensors, can collect data that are used to generate AR models. For example, the combination of GIS, AR, and drones generates an AR model of coastal terrain, through which key factors of terrain changes can be judged [107].
Additionally, drones equipped with specialised sensors, such as thermal or multispectral cameras, can provide valuable data for specific maritime applications. In combination with AR, these sensors enable users to visualise and analyse critical information that would otherwise be invisible to the naked eye. For instance, thermal cameras on drones can detect temperature variations in water, helping to identify potential hazards or anomalies [108]. By integrating these data with AR overlays, users can gain a deeper understanding of the maritime environment and make more informed decisions.
It is evident from the existing literature that the integration of drones with AR technology opens up a world of possibilities in maritime applications. From providing aerial perspectives and overlaying real-time information to capturing specialised data, drones significantly enhance AR experiences in the maritime domain. This synergy between drones and AR holds tremendous potential for exploration, safety, and environmental monitoring in coastal and marine areas.
3.9. Cargo Loading and Unloading
Drones are being explored for cargo operations in maritime settings. They can assist in the efficient loading and unloading of goods on ships or between ships and shores. Drones equipped with lifting mechanisms or cargo pods can transport small packages or supplies, reducing the need for manual labour and optimising logistics processes. This technology has the potential to streamline operations in ports, offshore platforms, and logistics centres.
The utilisation of drones in cargo operations brings numerous benefits to the maritime industry. Firstly, drones offer increased flexibility and adaptability compared to traditional methods. They can swiftly navigate through congested port areas and tight spaces, reaching locations that may be challenging for conventional machinery or vehicles. As a result, the loading and unloading process becomes more agile and less time-consuming [72].
Moreover, the introduction of drones in cargo operations has the potential to streamline activities in various maritime settings. Ports, offshore platforms, and logistics centres can greatly benefit from the implementation of this technology. Drones enable the quick and precise delivery of goods, eliminating bottlenecks and reducing waiting times. For example, drones drag goods along the sea surface to complete deliveries between coasts, which is called the Side-Pull Manoeuvre (SPM) [109]. Therefore, the integration of drones in cargo loading and unloading operations in maritime settings represents a significant advancement in the field of logistics. By leveraging their lifting capabilities and manoeuvrability, drones offer a promising solution to optimise processes and improve efficiency.
4. Challenges and Solutions of Using Drones in Maritime Transport
4.1. Technical Challenges of Using Drones and the Associated Solutions in Maritime Transport
The technical challenges of drones in the maritime transport domain are delineated, encompassing the difficulties in flight control, navigation, power, communication, and vision systems.
4.1.1. Flight Control System
The prevailing trend in flight control technology is flight intelligence, which has already gained widespread adoption. However, there are still several issues that have important theoretical implications that are unaddressed and hence require further investigation. Firstly, the existing fault-tolerant technology primarily revolves around fault-tolerant control laws for two types of actuator deviations: actuator deviation and actuator failure faults. Nonetheless, the physical limitations of the actuator motor and other factors can restrict the actuator control input, leading to errors stemming from these limitations. Hence, it is necessary to develop new fault-tolerant control algorithms that can effectively handle restricted control inputs [110,111]. Secondly, the insufficient infrastructure at sea poses a challenge to drone recharge. One potential solution is to integrate UAV landings with ships or offshore wind farms [112]. Although the current research primarily focuses on visual landings, future studies should take into account weather conditions and ship movements. Exploring autonomous ship landing technology is crucial to broadening the scope of drone applications in the maritime sector [113].
Overall, while flight control technology has embraced the predominant trend of flight intelligence, there are still unresolved issues that warrant further investigation. Enhancing fault-tolerant control algorithms with restricted control inputs and exploring autonomous ship landing technology are vital steps to address the challenges faced in this domain.
4.1.2. Navigation System
The current state of UAV navigation technology primarily involves the utilisation of single and combined navigation methods. However, the future directions in UAV navigation technology encompass several important aspects. Firstly, inertial guidance technology plays a significant role in UAV navigation. As advancements continue in different types of inertial guidance technology and computer systems, future research will concentrate on developing smaller, lower-power consumption inertial guidance systems that are well-suited for UAV payloads [114]. Additionally, efforts will be made to enhance the accuracy of the technology to achieve higher levels of precision. Secondly, it is imperative to conduct thorough and detailed analyses of the stability and reliability of UAV navigation technologies. Instead of relying solely on one or two technologies, the combination of multiple navigation technologies can improve the overall performance of the navigation system, even in the event of failures in one particular technology [115,116].
The future of UAV navigation technology involves advancing inertial guidance systems to be more suitable for UAV payloads, improving accuracy levels, and conducting comprehensive analyses of stability and reliability. By combining multiple navigation technologies, the performance and reliability of UAV navigation systems can be enhanced.
4.1.3. Power System
The recent patent distribution in powertrain branch technologies indicates that fuel engines have obtained the highest number of patents, followed by hybrids, propellers, and electric motors. Each technology faces unique development challenges. Firstly, fuel engines remain the primary focus of research, especially for large-scale cargo drones with long ranges and heavy payloads. Future challenges in this area include retrofitting and implementing automatic onboard starting for conventional engines [117]. Secondly, hybrid power technology necessitates the development of coupling and integrated control technologies for gasoline–electric power generation. This will be crucial for future advancements in hybrid drone technology [118]. Thirdly, propeller technology should give priority to the development of pitch and locking technologies [119]. Improving these aspects will enhance the efficiency and performance of propellers in drone applications. Lastly, motor technology should concentrate on fault-tolerant motor control and the exploration of new energy sources [120,121]. These advancements will increase the range and enhance the flight control performance of drones using electric motors.
It is evident that the development challenges vary for different powertrain technologies in the drone industry. These challenges include retrofitting and automatic starting for fuel engines, coupling and integrated control for hybrid power, pitch and locking for propeller technology, and fault-tolerant motor control with new energy sources for electric motors. Addressing these challenges will contribute to the overall advancement of drone powertrain technologies.
4.1.4. Communication System
UAV-assisted mobile communications hold significant promise, but the technology is still at its nascent stages, and numerous challenges need to be thoroughly addressed. Firstly, achieving seamless coverage over a wide area necessitates high-speed and low-latency data interaction between drones and other heterogeneous networks in an airspace network [122,123]. This presents a pressing technical challenge that requires further research and development to enable efficient and reliable communication between drones and existing networks. Secondly, the broadcast nature of wireless communications raises concerns regarding the potential exposure of user information over the air. UAV communications are particularly vulnerable to eavesdropping and channel estimation attacks, which can lead to interception and unauthorised access to private information [124,125]. Ensuring the security of communication transmissions and developing robust countermeasures against active jamming attacks are critical areas that require significant attention and future research efforts.
To sum up, the field of UAV-assisted mobile communications shows immense potential, but there are significant challenges that need to be addressed. Achieving high-speed and low-latency data interaction, ensuring the security and privacy of communication transmissions, and developing robust defences against active jamming attacks are key areas that require further exploration and innovation to unlock the full capabilities of this technology.
4.1.5. Vision System
The utilisation of vision sensors in drone applications is increasingly widespread; however, researchers have to address various challenges associated with this technology. Firstly, while researchers primarily concentrate on enhancing the performance of vision sensors, security concerns are often overlooked. The negligence of security issues will generate serious consequences, such as disrupting UAV hovering and filming. To mitigate these risks, it is necessary to conduct further research to address security aspects, specifically those relating to vision sensors [126]. Secondly, the processors carried by drones are typically small in size and possess limited computing power. Therefore, it is crucial to develop lightweight vision algorithms that can operate efficiently on these processors without compromising detection quality or speed [127,128]. The focus should be on optimising algorithms to ensure optimal performance with limited computing resources.
Ultimately, as the use of vision sensors in drones becomes more prevalent, it is essential to address key issues. These include enhancing security measures related to vision sensors and developing lightweight vision algorithms that can efficiently run on the limited computing power available on drone processors. By tackling these challenges, the full potential of vision sensors in drone applications can be realised.
Based on the above analysis in Section 4.1, the technical challenges of using drones in maritime transport and the relevant solutions are listed in Table 6. It can provide references for different stakeholders.
4.2. Challenges and Solutions Associated with the Use of Drones in Future Maritime Transport
In recent years, the utilisation of drones in maritime traffic has undergone significant advancements. However, there remains ample room for further improvement. These challenges prompt endeavours to investigate the future development of drones in five essential domains of maritime transport: marine rescue, marine safety and surveillance, marine navigation, marine environment, and marine communications.
4.2.1. Marine Rescue
The existing applications of drones in marine rescue encompass searching for rescue targets, delivering supplies, and path planning for search operations. However, to simulate the future development of this technology, it is essential to address the following urgent challenges:
(1) Transportation of injuries from the sea: When an incident occurs at sea, it is a challenging task to transport injured individuals from sea to somewhere safe, such as shore or nearby safe ships, particularly during undersea rescue operations. Conventional transportation methods are often time-consuming and not conducive to prompt treatment. Employing medical drones for transportation purposes can serve as an efficient alternative to traditional ship transport. However, the current research on this technology primarily focuses on feasibility, and further development on real-word demonstration is necessary to address this critical issue [129].
(2) Visual technology plays a primary role in drones’ involvement in rescue operations by locating injured individuals. Nevertheless, maritime environments are frequently affected by adverse weather conditions such as rain and fog, which can impede visual detection efforts [127]. To overcome this challenge, there is a need for radar-equipped drones capable of penetrating clouds and rain to swiftly identify the location of targets [130]. Additionally, long-endurance drones can serve as command centres, transmitting real-time visual data from disaster sites [71]. It is vital to do further research in this area to improve the effectiveness of rescue operations.
4.2.2. Marine Safety and Surveillance
Specific challenges in terms of deep learning-based methods and data transmission capabilities affect the significance of using drones for marine surveillance. They include.
(1) Data transmission: Real-time monitoring data collected by drones need to be efficiently transmitted to shore-based mobile monitoring vehicles or ground-based base stations via a control data chain. In medium to long-range sea monitoring, the collected data can be transmitted to unmanned vessels or maritime law enforcement vessels, which can establish communication with the rear using shipboard satellite equipment [131]. Within this context, new solutions to improving data transmission during UAV surveillance are wanted to ensure the reliability and security of the transmitted data, especially in adverse weather conditions and remote areas [132].
(2) Data processing and data fusion for maritime supervision: It is crucial to develop effective techniques for data processing and fusion to enhance the overall effectiveness of maritime drone surveillance [133]. The integration of vessel behaviour monitored by drones with vessel information obtained using the AIS can help detect potential violations and improve monitoring capabilities [134,135].
(3) Cooperation between drones and existing maritime supervision equipment: It is promising to develop a 3D maritime supervision system with Vessel Traffic Service (VTS) as the central monitoring point and foster cooperation between drones and patrol vessels [136,137]. The development can ensure seamless coordination and collaboration between different surveillance assets.
4.2.3. Marine Navigation
Drones have the potential to enhance vessel inspection by providing stable hovering, autonomous obstacle avoidance, and real-time transmission of ultra-high definition photos in environments without satellite communication, light, and sufficient electromagnetic interference. However, several challenges remain in marine navigation that require attention:
(1) Utilising drones for measuring hull structure thickness: Using drones for measuring hull structure thickness during inspections can significantly improve inspection efficiency. However, current technologies rely mainly on manual handheld ultrasonic thickness gauges, lacking automation. Further research and development are needed to automate this process and enhance measurement accuracy [86].
(2) Automatic image recognition, measurement and real-time alerting of structural defects in hulls: Vision technology can play a crucial role in scanning the hull structure and accurately identifying locations of deformation, thereby improving the effectiveness of online inspection [88,138]. It is beneficial to develop advanced algorithms for automatic image recognition, precise measurements, and real-time alerting to enhance the efficiency and accuracy of detecting structural defects.
(3) Autonomous tracking flight of drones inside cabins: Vision technology can facilitate smooth and practical tracking tasks within ship cabins, which remains challenging when searching for targets in confined areas. A future research agenda should be set to develop autonomous tracking capabilities of drones within cabins, as they can aid in significantly improving inspection efficiency and enable effective monitoring of specific areas [88].
4.2.4. Marine Environment
Although showing some attractiveness in coastal ecological monitoring, UAV technology has still revealed some application problems in practice.
(1) Data fusion: The sensing data acquisition from a single UAV could arguably be insufficient to meet the actual needs of coastal environmental monitoring. A possible solution approach is to combine multiple payloads, such as visible loads, infrared loads, and light detection and ranging (LiDAR), to acquire remote sensing data [139]. By fusing data from different sources with varying characteristics in the same area, the reliability of remote sensing information can be better assured.
(2) Limited coverage area: When monitoring missions span across a large area, a single UAV may need to make multiple trips to cover the entire region, resulting in a time-consuming and inefficient result. The implementation of self-organising network technology can enable multiple drones to work collectively, optimising the monitoring mission and completing it in a more efficient and timely manner [140]. Furthermore, drone carriers (e.g., ships carrying drones) can be deployed to enlarge the coverage area [91].
4.2.5. Marine Communications
In marine communications, drones are mainly applied as communication relay nodes. While research has been conducted on the static 3D deployment and dynamic trajectory planning of drones, there are still unresolved issues that need to be addressed, taking into account the static and dynamic characteristics of drones.
(1) Interference management: Deploying drones effectively in the presence of interference is a significant challenge. Addressing interference-related issues will be critical to optimise the performance of drone-based communication systems [141,142].
(2) Trajectory planning in three dimensions: Current studies often assume that all drones fly at the same fixed altitude when planning their trajectory. However, to maximise performance and coverage, it is necessary to enable UAVs to travel along any path in three dimensions [143,144]. Research efforts are required to develop trajectory-planning algorithms that allow drones to navigate dynamically while considering obstacles, communication range, and other factors.
According to the above-mentioned content in Section 4.2, Table 7 presents an overview of the challenges and corresponding solutions related to the application of drones in maritime transport in the future. It serves as a reference guide for various stakeholders involved in the maritime industry.
4.3. Implications from the Challenges and Solutions
By taking into account the challenges and solutions of the use of drones in the current and future maritime transport from Figure 6 and Figure 7, the following departments can make informed decisions, develop appropriate strategies, and drive innovation in this evolving field.
(1) Maritime regulatory authorities can utilise the information on technical challenges and solutions to develop or update regulations and guidelines regarding the use of drones in maritime transport. This can help ensure safety, security, and compliance with regulatory requirements.
(2) Shipping companies and port operators can gain insights into the technical challenges and corresponding solutions to integrate drones effectively into their operations. They can explore the implementation of drone technologies for tasks such as surveillance, cargo delivery, and maintenance operations.
(3) Companies involved in drone manufacturing and technology development can benefit from the identified technical challenges and solutions. This information can guide them in improving drone designs, enhancing performance, and addressing specific requirements for maritime applications.
(4) Academic institutions and research organisations can leverage the challenges and solutions to identify further research and development areas. They can focus on refining existing drone technologies, exploring new applications, and addressing emerging technical challenges in the maritime transport sector.
5. Conclusions
This paper presents a systematic review of research on drone applications in the maritime industry, encompassing marine safety and surveillance, marine rescue, marine environment, marine communications, military and naval applications, anti-piracy applications, augmented reality applications, and cargo loading and unloading applications. It proposes a new classification scheme based on drone flight characteristics to aid in selecting the most suitable drone for different situations. Furthermore, it provides detailed descriptions of the evolution trends, different applications, and technical points for drones in maritime transport to promote the systematic application and holistic development of drones in the maritime industry. This paper not only discovers the promising application prospects of drones in the maritime industry, but also highlights the challenges facing its future developments, such as safety, stability, and reliability. It analyses the technical bottlenecks of drones in the maritime environment and proposes technological innovations and solutions to ensure safe and sustainable development. In summary, this paper provides valuable support and guidance for the application and development of drones in the maritime industry.
Future work will focus on the optimisation of maritime rescue by drones and the seamless cooperation of drones and ships in ensuring maritime safety. Such collaborations could lead to the development of integrated systems where drones act as the eyes in the sky, providing ships with real-time information, early warnings, and strategic insights, ensuring a safer and more efficient maritime environment. It will also incorporate new data from 2023 and onwards, when they become available, to continue the relevant evolution analysis.
Author Contributions
Conceptualization, H.L.; methodology, H.L.; software, J.W., K.Z., W.X. and H.L.; validation, J.W. and H.L.; formal analysis, J.W., K.Z. and W.X.; investigation, K.Z. and W.X.; resources, J.W., K.Z., W.X. and H.L.; data curation, J.W., K.Z. and W.X.; writing—original draft preparation, J.W. and H.L.; writing—review and editing, H.L. and Z.Y.; visualization, H.L. and Z.Y.; supervision, H.L. and Z.Y.; project administration, H.L. and Z.Y.; funding acquisition, Z.Y. All authors have read and agreed to the published version of the manuscript.
Funding
This work was funded by a European Research Council project (TRUST CoG 2019 864724).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Yang, T.; Jiang, Z.; Dong, J.; Feng, H.; Yang, C. Multi agents to search and rescue based on group intelligent algorithm and edge computing. In Proceedings of the IEEE International Conference on Internet of Things (iThings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData), Halifax, NS, Canada, 30 July–3 August 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 389–394. [Google Scholar]
- Qian, L.P.; Zhang, H.; Wang, Q.; Wu, Y.; Lin, B. Joint Multi-Domain Resource Allocation and Trajectory Optimization in UAV-Assisted Maritime IoT Networks. IEEE Internet Things J. 2023, 10, 539–552. [Google Scholar] [CrossRef]
- Mittal, H.; Joshi, A. Automatic Ship Detection Using CFAR Algorithm for Quad-Pol UAV-SAR Imagery. In Proceedings of the Proceedings of Uasg 2021: Wings 4 Sustainability; Jain, K., Mishra, V., Pradhan, B., Eds.; Springer International Publishing Ag: Cham, Switzerland, 2023; Volume 304, pp. 199–210. [Google Scholar]
- Li, J.; Zhang, G.; Jiang, C.; Zhang, W. A Survey of Maritime Unmanned Search System: Theory, Applications and Future Directions. Ocean Eng. 2023, 285, 115359. [Google Scholar] [CrossRef]
- Chan, K.W.; Nirmal, U.; Cheaw, W.G. Progress on Drone Technology and Their Applications: A Comprehensive Review. In AIP Conference Proceedings; AIP Publishing: Ho Chi Minh, Vietnam, 2018; p. 020308. [Google Scholar]
- Telli, K.; Kraa, O.; Himeur, Y.; Ouamane, A.; Boumehraz, M.; Atalla, S.; Mansoor, W. A Comprehensive Review of Recent Research Trends on Unmanned Aerial Vehicles (UAVs). Systems 2023, 11, 400. [Google Scholar] [CrossRef]
- Thakkar, P.; Balaji, A.; Narwane, V.S. Intelligent Unmanned Aerial Vehicles. In Proceedings of International Conference on Intelligent Manufacturing and Automation; Vasudevan, H., Kottur, V.K.N., Raina, A.A., Eds.; Lecture Notes in Mechanical Engineering; Springer: Singapore, 2019; pp. 485–494. ISBN 9789811324895. [Google Scholar]
- Van’t Hof, A.; Nieh, J. AnDrone: Virtual Drone Computing in the Cloud. In Proceedings of the Fourteenth EuroSys Conference 2019, New York, NY, USA, 25–28 March 2019; ACM: Dresden, Germany, 2019; pp. 1–16. [Google Scholar]
- Sharma, J.; Mehra, P.S. Secure Communication in IOT-Based UAV Networks: A Systematic Survey. Internet Things 2023, 23, 100883. [Google Scholar] [CrossRef]
- Lyu, M.; Zhao, Y.; Huang, C.; Huang, H. Unmanned Aerial Vehicles for Search and Rescue: A Survey. Remote Sens. 2023, 15, 3266. [Google Scholar] [CrossRef]
- Colefax, A.P.; Butcher, P.A.; Pagendam, D.E.; Kelaher, B.P. Reliability of Marine Faunal Detections in Drone-Based Monitoring. Ocean Coast. Manag. 2019, 174, 108–115. [Google Scholar] [CrossRef]
- Jayson-Quashigah, P.-N.; Appeaning Addo, K.; Amisigo, B.; Wiafe, G. Assessment of Short-Term Beach Sediment Change in the Volta Delta Coast in Ghana Using Data from Unmanned Aerial Vehicles (Drone). Ocean Coast. Manag. 2019, 182, 104952. [Google Scholar] [CrossRef]
- Simões, R.S.; Calliari, L.J.; de Figueiredo, S.A.; de Oliveira, U.R.; de Almeida, L.P.M. Coastline Dynamics in the Extreme South of Brazil and Their Socio-Environmental Impacts. Ocean Coast. Manag. 2022, 230, 106373. [Google Scholar] [CrossRef]
- Tucker, J.P.; Colefax, A.P.; Santos, I.R.; Kelaher, B.P.; Pagendam, D.E.; Butcher, P.A. White Shark Behaviour Altered by Stranded Whale Carcasses: Insights from Drones and Implications for Beach Management. Ocean Coast. Manag. 2021, 200, 105477. [Google Scholar] [CrossRef]
- Roman, A.; Prasyad, H.; Oiry, S.; Davies, B.F.R.; Brunier, G.; Barille, L. Mapping Intertidal Oyster Farms Using Unmanned Aerial Vehicles (UAV) High-Resolution Multispectral Data. Estuar. Coast. SHELF Sci. 2023, 291, 108432. [Google Scholar] [CrossRef]
- Giusti, E.; Capria, A.; Saverino, A.L.; Gelli, S.; Munoz-Castaner, J.; Dosil, R.; Naya, J.; Menendez, J. A Drone-Based Multisensory Payload for Maritime Pollutants Detections. IEEE Aerosp. Electron. Syst. Mag. 2023, 38, 4–18. [Google Scholar] [CrossRef]
- Yuan, H.; Xiao, C.; Zhan, W.; Wang, Y.; Shi, C.; Ye, H.; Jiang, K.; Ye, Z.; Zhou, C.; Wen, Y.; et al. Target Detection, Positioning and Tracking Using New UAV Gas Sensor Systems: Simulation and Analysis. J. Intell. Robot. Syst. 2019, 94, 871–882. [Google Scholar] [CrossRef]
- Deng, M.; Peng, S.; Xie, X.; Jiang, Z.; Hu, J.; Qi, Z. A Diffused Mini-Sniffing Sensor for Monitoring SO2 Emissions Compliance of Navigating Ships. Sensors 2022, 22, 5198. [Google Scholar] [CrossRef] [PubMed]
- Peti, M.; Milas, A.; Krasevac, N.; Krizmancic, M.; Loncar, I.; Miskovic, N.; Bogdan, S. A Search Strategy and Vessel Detection in Maritime Environment Using Fixed-Wing UAVs. In Proceedings of the 2023 IEEE Underwater Technology, UT, Tokyo, Japan, 6–9 March 2023; IEEE: New York, NY, USA, 2023. [Google Scholar]
- Marques, M.M.; Lobo, V.; Aguiar, A.P.; Silva, J.E.; de Sousa, J.B.; Nunes, M.d.F.; Ribeiro, R.A.; Bernardino, A.; Cruz, G.; Marques, J.S. An Unmanned Aircraft System for Maritime Operations: The Automatic Detection Subsystem. Mar. Technol. Soc. J. 2021, 55, 38–49. [Google Scholar] [CrossRef]
- Jin, G.; Wei, J.-G.; Zhai, J.-S. Denoising of Maritime Unmanned Aerial Vehicles Photography Based on Guidance Correlation Pixel Sampling and Aggregation. IEEE Access 2022, 10, 40109–40118. [Google Scholar] [CrossRef]
- Leira, F.S.; Helgesen, H.H.; Johansen, T.A.; Fossen, T.I. Object Detection, Recognition, and Tracking from UAVs Using a Thermal Camera. J. Field Robot. 2021, 38, 242–267. [Google Scholar] [CrossRef]
- Hunt, K.; Agarwal, P.; Zhuang, J. On the Adoption of New Technology to Enhance Counterterrorism Measures: An Attacker-Defender Game with Risk Preferences. Reliab. Eng. Syst. Saf. 2022, 218, 108151. [Google Scholar] [CrossRef]
- Zhao, H.; Zhang, H.; Zhao, Y. YOLOv7-Sea: Object Detection of Maritime UAV Images Based on Improved YOLOv7. In Proceedings of the 2023 IEEE/CVF Winter Conference on Applications of Computer Vision Workshops (WACVW), Waikoloa, HI, USA, 3–7 January 2023; IEEE Computer Soc: Los Alamitos, CA, USA, 2023; pp. 233–238. [Google Scholar]
- Shen, L.; Wang, Y.; Liu, K.; Yang, Z.; Shi, X.; Yang, X.; Jing, K. Synergistic Path Planning of Multi-UAVs for Air Pollution Detection of Ships in Ports. Transp. Res. Part E Logist. Transp. Rev. 2020, 144, 102128. [Google Scholar] [CrossRef]
- Zhou, F.; Zhu, L.; Zou, J.; Bai, X. Tracking and Measuring Plumes from Sailing Ships Using an Unmanned Aerial Vehicle. IET Intell. Transp. Syst. 2023, 17, 285–294. [Google Scholar] [CrossRef]
- Yang, T.; Jiang, Z.; Sun, R.; Cheng, N.; Feng, H. Maritime Search and Rescue Based on Group Mobile Computing for Unmanned Aerial Vehicles and Unmanned Surface Vehicles. IEEE Trans. Ind. Inform. 2020, 16, 7700–7708. [Google Scholar] [CrossRef]
- Rahmes, M.; Chester, D.; Hunt, J.; Chiasson, B. Optimizing Cooperative Cognitive Search and Rescue UAVs; Dudzik, M., Ricklin, J., Eds.; SPIE: Orlando, FL, USA, 2018; Volume 10643. [Google Scholar]
- Ma, Y.; Li, B.; Huang, W.; Fan, Q. An Improved NSGA-II Based on Multi-Task Optimization for Multi-UAV Maritime Search and Rescue under Severe Weather. J. Mar. Sci. Eng. 2023, 11, 781. [Google Scholar] [CrossRef]
- Marques, M.M.; Carapau, R.S.; Rodrigues, A.V.; Lobo, V.; Gouveia-Carvalho, J.; Antunes, W.; Goncalves, T.; Duarte, F.; Verissimo, B. GammaEx Project: A Solution for CBRN Remote Sensing Using Unmanned Aerial Vehicles in Maritime Environments. In Proceeding of the OCEANS 2017—Anchorage, Anchorage, AK, USA, 18–21 September 2017; pp. 1–6. [Google Scholar]
- Chamoso, P.; Perez, A.; Rodriguez, S.; Corchado, J.M.; Sempere, M.; Rizo, R.; Aznar, F.; Pujol, M. Modeling Oil-Spill Detection with Multirotor Systems Based on Multi-Agent Systems. In Proceeding of the 17th International Conference on Information Fusion (FUSION), Salamanca, Spain, 7–10 July 2014; pp. 1–8. [Google Scholar]
- Marques, M.M.; Lobo, V.; de Nunes, M.F.; Batista, R.; Almeida, J.; Ribeiro, R.; Bernardino, A. Oil Spills Detection: Challenges Addressed in the Scope of the SEAGULL Project. In Proceeding of OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–6. [Google Scholar]
- Cruz, G.; Bernardino, A. Image Saliency Applied to Infrared Images for Unmanned Maritime Monitoring. In Proceedings of the Computer Vision Systems (ICVS 2015); Nalpantidis, L., Kruger, V., Eklundh, J.O., Gasteratos, A., Eds.; Springer: Berlin, Germany, 2015; Volume 9163, pp. 511–522. [Google Scholar]
- Pereira, E.; Beneatel, R.; Correia, J.; Felix, L.; Goncalves, G.; Morgado, J.; Sousa, J. Unmanned Air Vehicles for Coastal and Environmental Research. J. Coast. Res. 2009, 2, 1557–1561. [Google Scholar]
- Zhang, Y.; Lyu, J.; Fu, L. Energy-Efficient Cyclical Trajectory Design for UAV-Aided Maritime Data Collection in Wind. IEEE Trans. Wirel. Commun. 2022, 21, 10871–10886. [Google Scholar] [CrossRef]
- Andrade, F.A.A.; Storvold, R.; Johansen, T.A. Autonomous UAV Surveillance of a Ship’s Path with MPC for Maritime Situational Awareness. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; IEEE: New York, NY, USA, 2017; pp. 633–639. [Google Scholar]
- Gu, X.; Liu, T.; Yang, D.; Huang, K.; Tian, Y. Research on Application of Maritime Calibration Based on Fixed-Wing UAV. In Proceedings of the 2019 IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 15–17 March 2019; Xu, B., Ed.; IEEE: New York, NY, USA, 2019; pp. 2585–2589. [Google Scholar]
- Helgesen, H.H.; Leira, F.S.; Bryne, T.H.; Albrektsen, S.M.; Johansen, T.A. Real-Time Georeferencing of Thermal Images Using Small Fixed-Wing UAVs in Maritime Environments. ISPRS J. Photogramm. Remote Sens. 2019, 154, 84–97. [Google Scholar] [CrossRef]
- Ghazali, S.N.A.M.; Anuar, H.A.; Zakaria, S.N.A.S.; Yusoff, Z. IEEE Determining Position of Target Subjects in Maritime Search and Rescue (MSAR) Operations Using Rotary Wing Unmanned Aerial Vehicles (UAVs). In Proceedings of the 2016 International Conference on Information and Communication Technology (ICICTM), Kuala Lumpur, MA, USA, 16–17 May 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–4. [Google Scholar]
- Raap, M.; Zsifkovits, M.; Pickl, S. Trajectory Optimization under Kinematical Constraints for Moving Target Search. Comput. Oper. Res. 2017, 88, 324–331. [Google Scholar] [CrossRef]
- Hohzaki, R.; Morimoto, T.; Omi, S. Flight Scheduling for the SH-60J Military Helicopter. Mil. Oper. Res. 2011, 16, 5–17. [Google Scholar] [CrossRef]
- Michele, T.; Antonio, D.; Madonia, M. Energy and Mission Optimization of an Airship by Constructal Design for Efficiency Method. In Proceedings of the Asme International Mechanical Engineering Congress and Exposition, Columbus, OH, USA, 15–21 November 2013; American Society Mechanical Engineers: New York, NY, USA, 2014; Volume 1, p. V001T01A021. [Google Scholar]
- Ribeiro, C.G.; Constantin Raptopoulos, L.S.; Dutra, M.S. An Autonomous Airship Swarm for Maritime Patrol. In Proceedings of the Developments and Advances in Defense and Security; Rocha, A., Pereira, R.P., Eds.; Springer: Berlin, Germany, 2020; Volume 152, pp. 307–320. [Google Scholar]
- Qi, S.; Wu, J.; Zhou, Q.; Kang, M. Low-Resolution Ship Detection from High-Altitude Aerial Images. In Proceedings of the Mippr 2017: Automatic Target Recognition and Navigation; Liu, J., Udupa, J.K., Hong, H., Eds.; SPIE, The International Society Optical Engineering: Bellingham, Australian, 2018; Volume 10608, p. 1060805. [Google Scholar]
- Cairns, W.R. AIS and Long Range Identification & Tracking. J. Navig. 2005, 58, 181–189. [Google Scholar] [CrossRef]
- Huba, T.; Huba, M. Autonomous Paracopter Control Design. In Proceedings of the Computer Aided Systems Theory—Eurocast 2015; MorenoDiaz, R., Pichler, F., QuesadaArencibia, A., Eds.; Springer International Publishing Ag: Cham, Germany, 2015; Volume 9520, pp. 95–102. [Google Scholar]
- Sivera, R.; Stasek, P.; Vorlicek, J.; Calta, L.; Kropik, P.; Karban, P. Advanced Paraglider Simulator Control System. In Proceedings of the 2021 22nd International Conference on Computational Problems of Electrical Engineering (CPEE), Hrádek u Sušice, Czech Republic, 15–17 September 2021; IEEE: New York, NY, USA, 2021. [Google Scholar]
- Huba, T.; Pestun, I.; Huba, M.; Huba, M. Learning by Pleasure—Powered Paraglider Control and Other UAVs Control. In Proceedings of the 2011 14th International Conference on Interactive Collaborative Learning, Piestany, Slovakia, 21–23 September 2011; IEEE: New York, NY, USA, 2011; pp. 548–552. [Google Scholar]
- Xin, H.; Qin, S.; Kai, L. Weihongliang Unmanned Aerial Vehicle (UVA) Bionic Wing Design and Performance Analysis. In Proceedings of the 2015 International Conference on Automation, Mechanical Control and Computational Engineering, Changsha, China, 24–25 October 2015; Cheng, A., DeSouza, A., Eds.; Atlantis Press: Paris, France, 2015; Volume 124, pp. 2031–2034. [Google Scholar]
- Hua, X.; Sun, G.; Zhang, C.; Shao, W.; Wang, P. Numerical Simulation Based on the Seagull Wing Unmanned Aircraft Airfoil. In Proceedings of the 2012 2nd International Conference on Applied Robotics for the Power Industry (CARPI), Zurich, Switzerland, 11–13 September 2012; IEEE: New York, NY, USA, 2012; pp. 363–366. [Google Scholar]
- Zhang, J.; Chen, B.S.; Hua, X. Based on the Orthogonal Experiment Optimization of UAV Wing Bionic Airfoil Design. In Proceedings of the Advances in Engineering Materials and Applied Mechanics; Zhang, G., Gao, Q., Xu, Q., Eds.; Crc Press-Taylor & Francis Group: Boca Raton, FL, USA, 2016; pp. 91–97. [Google Scholar]
- Ramadiansyah, M.L.; Utama, A.B.; Suseno, P.a.P.; Ramadhan, R.A.; Hidayat, K.; Septiyana, A.; Rizaldi, A.; Atmasari, N.; Jayanti, E.B. High Lift Analysis for Unmanned Aircraft LAPAN Surveillance UAV (LSU)-05 NG. In Proceedings of the 7th International Seminar on Aerospace Science and Technology—ISAST 2019; Putro, I.E., Kurniawati, F., Adi, A.P., Bahri, S., Eds.; American Institutes Physics: Melville, NY, USA, 2020; Volume 2226, p. 030013. [Google Scholar]
- Nithiyapathi, C.; Sreelakshmy, P.S.; Suman, M. Aerodynamic Characterization of an Albatross Wing for Bio-Inspired Unmanned Aerial Vehicle. Mater. Today Proc. 2021, 37, 1659–1664. [Google Scholar] [CrossRef]
- Merlino, S.; Paterni, M.; Berton, A.; Massetti, L. Unmanned Aerial Vehicles for Debris Survey in Coastal Areas: Long-Term Monitoring Programme to Study Spatial and Temporal Accumulation of the Dynamics of Beached Marine Litter. Remote Sens. 2020, 12, 1260. [Google Scholar] [CrossRef]
- Topouzelis, K.; Papakonstantinou, A.; Garaba, S.P. Detection of Floating Plastics from Satellite and Unmanned Aerial Systems (Plastic Litter Project 2018). Int. J. Appl. Earth Obs. Geoinf. 2019, 79, 175–183. [Google Scholar] [CrossRef]
- Fallati, L.; Polidori, A.; Salvatore, C.; Saponari, L.; Savini, A.; Galli, P. Anthropogenic Marine Debris Assessment with Unmanned Aerial Vehicle Imagery and Deep Learning: A Case Study along the Beaches of the Republic of Maldives. Sci. Total Environ. 2019, 693, 133581. [Google Scholar] [CrossRef]
- Gonçalves, G.; Andriolo, U.; Pinto, L.; Bessa, F. Mapping Marine Litter Using UAS on a Beach-Dune System: A Multidisciplinary Approach. Sci. Total Environ. 2020, 706, 135742. [Google Scholar] [CrossRef] [PubMed]
- Martin, C.; Parkes, S.; Zhang, Q.; Zhang, X.; McCabe, M.F.; Duarte, C.M. Use of Unmanned Aerial Vehicles for Efficient Beach Litter Monitoring. Mar. Pollut. Bull. 2018, 131, 662–673. [Google Scholar] [CrossRef] [PubMed]
- Colefax, A.P.; Butcher, P.A.; Kelaher, B.P. The Potential for Unmanned Aerial Vehicles (UAVs) to Conduct Marine Fauna Surveys in Place of Manned Aircraft. ICES J. Mar. Sci. 2018, 75, 1–8. [Google Scholar] [CrossRef]
- Joyce, K.E.; Duce, S.; Leahy, S.M.; Leon, J.; Maier, S.W.; Joyce, K.E.; Duce, S.; Leahy, S.M.; Leon, J.; Maier, S.W. Principles and Practice of Acquiring Drone-Based Image Data in Marine Environments. Mar. Freshw. Res. 2018, 70, 952–963. [Google Scholar] [CrossRef]
- Preliminary Annual Overview Of Marine Casualties And Incidents 2014–2020. Available online: https://www.emsa.europa.eu/publications/download/6557/4378/23.html (accessed on 2 October 2023).
- Annual Overview of Marine Casualties and Incidents 2021. Available online: https://www.emsa.europa.eu/publications/download/6955/4266/23.html (accessed on 2 October 2023).
- Annual Overview of Marine Casualties and Incidents 2022. Available online: https://www.emsa.europa.eu/publications/download/7362/4867/23.html (accessed on 2 October 2023).
- Estrada, M.A.R.; Ndoma, A. The Uses of Unmanned Aerial Vehicles -UAV’s- (or Drones) in Social Logistic: Natural Disasters Response and Humanitarian Relief Aid. In Proceedings of the ICTE in Transportation and Logistics 2018 (ICTE 2018); Ginters, E., Paulauskas, V., Estrada, M.A.R., Eds.; Elsevier Science Bv: Amsterdam, The Netherlands, 2019; Volume 149, pp. 375–383. [Google Scholar]
- Zailani, M.A.H.; Sabudin, R.Z.A.R.; Rahman, R.A.; Saiboon, I.M.; Ismail, A.; Mahdy, Z.A. Drone for Medical Products Transportation in Maternal Healthcare A Systematic Review and Framework for Future Research. Medicine 2020, 99, e21967. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Yang, L.T.; Meng, D.; Dong, M.; Ota, K.; Wang, H. Multi-UAV Cooperative Localization for Marine Targets Based on Weighted Subspace Fitting in SAGIN Environment. IEEE Internet Things J. 2022, 9, 5708–5718. [Google Scholar] [CrossRef]
- Zheng, R.; Yang, R.; Lu, K.; Zhang, S. A Search and Rescue System for Maritime Personnel in Disaster Carried on Unmanned Aerial Vehicle. In Proceedings of the 2019 18th International Symposium on Distributed Computing and Applications for Business Engineering and Science (Dcabes 2019), Wuhan, China, 8–10 November 2019; Yucheng, G., Ed.; IEEE: New York, NY, USA, 2019; pp. 43–47. [Google Scholar]
- Cho, S.-W.; Park, J.-H.; Park, H.-J.; Kim, S. Multi-UAV Coverage Path Planning Based on Hexagonal Grid Decomposition in Maritime Search and Rescue. Mathematics 2022, 10, 83. [Google Scholar] [CrossRef]
- Ai, B.; Jia, M.; Xu, H.; Xu, J.; Wen, Z.; Li, B.; Zhang, D. Coverage Path Planning for Maritime Search and Rescue Using Reinforcement Learning. Ocean Eng. 2021, 241, 110098. [Google Scholar] [CrossRef]
- Gallegos, A.-J.; Pertusa, A.; Gil, P.; Fisher, R.B. Detection of Bodies in Maritime Rescue Operations Using Unmanned Aerial Vehicles with Multispectral Cameras. J. Field Robot. 2019, 36, 782–796. [Google Scholar] [CrossRef]
- Lee, S.; Morrison, J.R. IEEE Decision Support Scheduling for Maritime Search and Rescue Planning with a System of UAVs and Fuel Service Stations. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1168–1177. [Google Scholar]
- Jofre-Briceno, C.; Munoz-La Rivera, F.; Atencio, E.; Herrera, R.F. Implementation of Facility Management for Port Infrastructure through the Use of UAVs, Photogrammetry and BIM. Sensors 2021, 21, 6686. [Google Scholar] [CrossRef] [PubMed]
- Cho, J.; Lim, G.; Biobaku, T.; Kim, S.; Parsaei, H. Safety and Security Management with Unmanned Aerial Vehicle (UAV) in Oil and Gas Industry. Procedia Manuf. 2015, 3, 1343–1349. [Google Scholar] [CrossRef]
- Lu, Y.; Guo, J.; Guo, S.; Fu, Q.; Xu, J. Study on Marine Fishery Law Enforcement Inspection System Based on Improved YOLO V5 with UAV. In Proceedings of the 2022 IEEE International Conference on Mechatronics and Automation (ICMA), Guangxi, China, 7–10 August 2022; pp. 253–258. [Google Scholar]
- Paszotta, Z.; Szumilo, M.; Szulwic, J. Internet Photogrammetry for Inspection of Seaports. Pol. Marit. Res. 2017, 24, 174–181. [Google Scholar] [CrossRef]
- Stein, M. Conducting Safety Inspections of Container Gantry Cranes Using Unmanned Aerial Vehicles. In Proceedings of the Dynamics in Logistics; Freitag, M., Kotzab, H., Pannek, J., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 154–161. [Google Scholar]
- Tang, G.; Liu, P.; Hou, Z.; Claramunt, C.; Zhou, P. Motion Planning of UAV for Port Inspection Based on Extended RRT* Algorithm. J. Mar. Sci. Eng. 2023, 11, 702. [Google Scholar] [CrossRef]
- Kim, J.; Oh, H.; Yu, B.; Kim, S. Optimal Task Assignment for UAV Swarm Operations in Hostile Environments. Int. J. Aeronaut. Space Sci. 2021, 22, 456–467. [Google Scholar] [CrossRef]
- Panico, A.; Fragonara, L.Z.; Al-Rubaye, S. Adaptive Detection Tracking System for Autonomous UAV Maritime Patrolling. In Proceedings of the 2020 IEEE 7th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Pisa, Italy, 22–24 June 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 539–544. [Google Scholar]
- Jain, U.; Rogers, M.; Matson, E.T. Drone Forensic Framework: Sensor and Data Identification and Verification. In Proceedings of the 2017 IEEE Sensors Applications Symposium (SAS), Glassboro, NJ, USA, 13–15 March 2017; pp. 1–6. [Google Scholar]
- Li, X.; Han, Y.; Yu, F.-J.; Chen, G. Multi-Sensor Data Real-Time Monitoring and Management System Based on Onboard UAV for Ocean Observation. In Proceedings of the 2016 4th International Conference on Machinery, Materials and Information Technology Applications, Xi’an, China, 10–11 December 2016; Fang, Y., Xin, Y., Eds.; Atlantis Press: Paris, France, 2016; Volume 71, pp. 174–181. [Google Scholar]
- Yang, Z.; Yu, X.; Dedman, S.; Rosso, M.; Zhu, J.; Yang, J.; Xia, Y.; Tian, Y.; Zhang, G.; Wang, J. UAV Remote Sensing Applications in Marine Monitoring: Knowledge Visualization and Review. Sci. Total Environ. 2022, 838, 155939. [Google Scholar] [CrossRef] [PubMed]
- Parameswaran, S.; Lane, C.; Bagnall, B.; Buck, H. Marine Object Detection in UAV Full-Motion Video. In Airborne Intelligence, Surveillance, Reconnaissance (ISR) Systems and Applications XI; Henry, D., Lange, D., VonBerg, D., Rajan, S., Walls, T., Young, D., Eds.; SPIE: Bellingham, WA, USA, 2014; Volume 9076. [Google Scholar]
- Primeau, N.; Abielmona, R.; Falcon, R.; Petriu, E. Maritime Smuggling Detection and Mitigation Using Risk-Aware Hybrid Robotic Sensor Networks. In Proceeding of the IEEE Conference on Cognitive and Computational Aspects of Situation Management (CogSIMA), Savannah, GA, USA, 27–31 March 2017; pp. 1–7. [Google Scholar]
- Amaral, G.; Silva, H.; Lopes, F.; Ribeiro, J.P.; Freitas, S.; Almeida, C.; Martins, A.; Almeida, J.; Silva, E. UAV Cooperative Perception for Target Detection and Tracking in Maritime Environment. In Proceeding of the OCEANS 2017-Aberdeen, Aberdeen, UK, 19–22 June 2017; pp. 1–6. [Google Scholar]
- Ortiz, A.; Bonnin-Pascual, F.; Garcia-Fidalgo, E.; Company-Corcoles, J.P. Vision-Based Corrosion Detection Assisted by a Micro-Aerial Vehicle in a Vessel Inspection Application. Sensors 2016, 16, 2118. [Google Scholar] [CrossRef] [PubMed]
- Andersen, R.E.; Nalpantidis, L.; Boukas, E. Vessel Classification Using A Regression Neural Network Approach. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 4480–4486. [Google Scholar]
- Grippa, P.; Renzaglia, A.; Rochebois, A.; Schranz, M.; Simonin, O. Inspection of Ship Hulls with Multiple UAVs: Exploiting Prior Information for Online Path Planning. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 13777–13784. [Google Scholar]
- Saute, B.; Gagnon, J.-P.; Lariviere-Bastien, M.; Hogan-Lamarre, P.; Chamberland, M. Quantitative Gas Imaging of Cargo Ship Emissions Using Thermal Infrared Hyperspectral Imaging. In Proceedings of the Infrared Technology and Applications XLVIII; Andresen, B.F., Fulop, G.F., Zheng, L., Eds.; Spie-Int Soc Optical Engineering: Bellingham, WA, USA, 2022; Volume 12107, p. 121071G. [Google Scholar]
- Zhou, F.; Pan, S.; Chen, W.; Ni, X.; An, B. Monitoring of Compliance with Fuel Sulfur Content Regulations through Unmanned Aerial Vehicle (UAV) Measurements of Ship Emissions. Atmos. Meas. Tech. 2019, 12, 6113–6124. [Google Scholar] [CrossRef]
- Shen, L.; Hou, Y.; Yang, Q.; Lv, M.; Dong, J.-X.; Yang, Z.; Li, D. Synergistic Path Planning for Ship-Deployed Multiple UAVs to Monitor Vessel Pollution in Ports. Transp. Res. Part Transp. Environ. 2022, 110, 103415. [Google Scholar] [CrossRef]
- Zhou, F.; Hou, L.; Zhong, R.; Chen, W.; Ni, X.; Pan, S.; Zhao, M.; An, B. Monitoring the Compliance of Sailing Ships with Fuel Sulfur Content Regulations Using Unmanned Aerial Vehicle (UAV) Measurements of Ship Emissions in Open Water. Atmos. Meas. Tech. 2020, 13, 4899–4909. [Google Scholar] [CrossRef]
- Ma, Y.; Zhang, J.; Zhang, J. Analysis of Unmanned Aerial Vehicle (UAV) Hyperspectral Remote Sensing Monitoring Key Technology in Coastal Wetland. In Proceedings of the Selected Papers of the Photoelectronic Technology Committee Conferences Held November 2015; Lv, Y., Bao, W., Eds.; SPIE, The International Society Optical Engineering: Bellingham, WA, USA, 2016; Volume 9796, p. 97962S. [Google Scholar]
- Trasvina-Moreno, C.A.; Blasco, R.; Marco, A.; Casas, R.; Trasvina-Castro, A. Unmanned Aerial Vehicle Based Wireless Sensor Network for Marine-Coastal Environment Monitoring. Sensors 2017, 17, 460. [Google Scholar] [CrossRef] [PubMed]
- Octavian, A.; Jatmiko, W. Designing Intelligent Coastal Surveillance Based on Big Maritime Data. In Proceedings of the 2020 International Workshop on Big Data and Information Security (IWBIS), Depok, Indonesia, 17–18 October 2020; IEEE: New York, NY, USA, 2020; pp. 1–7. [Google Scholar]
- Faria, M.; Pinto, J.; Py, F.; Fortuna, J.; Dias, H.; Martins, R.; Leira, F.; Johansen, T.A.; Sousa, J.; Rajan, K. Coordinating UAVs and AUVs for Oceanographic Field Experiments: Challenges and Lessons Learned. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; IEEE: New York, NY, USA, 2014; pp. 6606–6611. [Google Scholar]
- Stokes, H.J.; Mortimer, J.A.; Laloe, J.-O.; Hays, G.C.; Esteban, N. Synergistic Use of UAV Surveys, Satellite Tracking Data, and Mark-Recapture to Estimate Abundance of Elusive Species. Ecosphere 2023, 14, e4444. [Google Scholar] [CrossRef]
- Gao, Z.; Liu, B.; Cheng, Z.; Chen, C.; Huang, L. Marine Mobile Wireless Channel Modeling Based on Improved Spatial Partitioning Ray Tracing. China Commun. 2020, 17, 1–11. [Google Scholar] [CrossRef]
- Xu, Z. Application Research of Tethered UAV Platform in Marine Emergency Communication Network. J. Web Eng. 2021, 20, 491–511. [Google Scholar] [CrossRef]
- Tang, R.; Feng, W.; Chen, Y.; Ge, N. NOMA-Based UAV Communications for Maritime Coverage Enhancement. China Commun. 2021, 18, 230–243. [Google Scholar] [CrossRef]
- Ham, A.; Similien, D.; Baek, S.; York, G. Unmanned Aerial Vehicles (UAVs): Persistent Surveillance for a Military Scenario. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; pp. 1411–1417. [Google Scholar]
- De Freitas, E.; Heimfarth, T.; Vinel, A.; Wagner, F.; Pereira, C.; Larsson, T. Cooperation among Wirelessly Connected Static and Mobile Sensor Nodes for Surveillance Applications. Sensors 2013, 13, 12903–12928. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Xu, J.; Zhong, L. Limited Intervention Collaborative Decision Making of MAV-UAV Team Based on VFCM. In Proceedings of the 2016 IEEE International Conference on Services Computing (SCC), San Francisco, CA, USA, 27 June–2 July 2016; IEEE: San Francisco, CA, USA, 2016; pp. 876–879. [Google Scholar]
- Saffre, F.; Hildmann, H.; Karvonen, H.; Lind, T. Self-Swarming for Multi-Robot Systems Deployed for Situational Awareness. In Proceedings of the New Developments and Environmental Applications of Drones; Lipping, T., Linna, P., Narra, N., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 51–72. [Google Scholar]
- Zhang, S.; Duan, H. Multiple UCAVs Target Assignment via Bloch Quantum-Behaved Pigeon-Inspired Optimization. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 6936–6941. [Google Scholar]
- Kaymal, T. Unmanned Aircraft Systems for Maritime Operations Chossing “a” Good Design for Achieving Operational Effectiveness. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (icuas), Arlington, TX, USA, 7–10 June 2016; IEEE: New York, NY, USA, 2016; pp. 763–768. [Google Scholar]
- Shih, N.-J.; Qiu, Y.-H. Resolving the Urban Dilemma of Two Adjacent Rivers through a Dialogue between GIS and Augmented Reality (AR) of Fabrics. Remote Sens. 2022, 14, 4330. [Google Scholar] [CrossRef]
- Boisvert, J.; Drouin, M.-A.; Godin, G.; Picard, M. Augmented Reality, 3D Measurement, and Thermal Imagery for Computer-Assisted Manufacturing. In Proceedings of the Emerging Digital Micromirror Device Based Systems and Applications XII; Lee, B.L., Ehmke, J., Eds.; SPIE: San Francisco, CA, USA, 2020; pp. 108–115. [Google Scholar]
- Brandao, A.S.; Smrcka, D.; Pairet, E.; Nascimento, T.; Saska, M. Side-Pull Maneuver: A Novel Control Strategy for Dragging a Cable-Tethered Load of Unknown Weight Using a UAV. IEEE Robot. Autom. Lett. 2022, 7, 9159–9166. [Google Scholar] [CrossRef]
- Segvic, M.; Krajcek, K.; Ivanjko, E. Technologies for Distributed Flight Control Systems: A Review. In Proceedings of the 2015 38th International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO); Biljanovic, P., Butkovic, Z., Skala, K., Mikac, B., Cicin-Sain, M., Sruk, V., Ribaric, S., Gros, S., Vrdoljak, B., Mauher, M., et al., Eds.; IEEE: New York, NY, USA, 2015; pp. 1060–1065. [Google Scholar]
- Tan, J.; Fan, Y.; Yan, P.; Wang, C.; Feng, H. Sliding Mode Fault Tolerant Control for Unmanned Aerial Vehicle with Sensor and Actuator Faults. Sensors 2019, 19, 643. [Google Scholar] [CrossRef]
- Li, Y.; Li, S.; Zhang, Y.; Zhang, W.; Lu, H. Dynamic Route Planning for a USV-UAV Multi-Robot System in the Rendezvous Task with Obstacles. J. Intell. Robot. Syst. 2023, 107, 52. [Google Scholar] [CrossRef]
- Ross, J.; Seto, M.; Johnston, C. Autonomous Landing of Rotary Wing Unmanned Aerial Vehicles on Underway Ships in a Sea State. J. Intell. Robot. Syst. 2022, 104, 1–9. [Google Scholar] [CrossRef]
- Pritzl, V.; Vrba, M.; Stepan, P.; Saska, M. Cooperative Navigation and Guidance of a Micro-Scale Aerial Vehicle by an Accompanying UAV Using 3D LiDAR Relative Localization. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; IEEE: New York, NY, USA, 2022; pp. 526–535. [Google Scholar]
- Krasuski, K.; Wierzbicki, D.; Bakula, M. Improvement of UAV Positioning Performance Based on EGNOS plus SDCM Solution. Remote Sens. 2021, 13, 2597. [Google Scholar] [CrossRef]
- Li, K.; Wang, X.; Liu, Z. Recovery and Guidance Technology of Collision Network Based on Multi-Source Information Fusion. In Proceedings of the 2020 2nd International Conference on Computer Science Communication and Network Security (CSCNS2020), Sanya, China, 22–23 December 2020; Barukcic, I., Ed.; E D P Sciences: Les Ulis, France, 2021; Volume 336, p. 04003. [Google Scholar]
- Wang, Y.; Shi, Y.; Cai, M.; Xu, W.; Pan, T.; Yu, Q. Study of Fuel-Controlled Aircraft Engine for Fuel-Powered Unmanned Aerial Vehicle: Energy Conversion Analysis and Optimization. IEEE Access 2019, 7, 109246–109258. [Google Scholar] [CrossRef]
- Boukoberine, M.N.; Zhou, Z.; Benbouzid, M. A Critical Review on Unmanned Aerial Vehicles Power Supply and Energy Management: Solutions, Strategies, and Prospects. Appl. Energy 2019, 255, 113823. [Google Scholar] [CrossRef]
- Zhu, T.; Zhao, L.; Yin, J. Research on Longitudinal Control Based on UAV Flight Load Test Technology. In Proceedings of the 2020 3rd International Conference on Unmanned Systems (ICUS), Harbin, China, 27–28 November 2020; IEEE: New York, NY, USA, 2020; pp. 885–890. [Google Scholar]
- Ismail, M.A.A.; Wiedemann, S.; Bosch, C.; Stuckmann, C. Design and Evaluation of Fault-Tolerant Electro-Mechanical Actuators for Flight Controls of Unmanned Aerial Vehicles. Actuators 2021, 10, 175. [Google Scholar] [CrossRef]
- Rohacs, J.; Kale, U.; Rohacs, D. Radically New Solutions for Reducing the Energy Use by Future Aircraft and Their Operations. Energy 2022, 239, 122420. [Google Scholar] [CrossRef]
- Angjo, J.; Shayea, I.; Ergen, M.; Mohamad, H.; Alhammadi, A.; Daradkeh, Y.I. Handover Management of Drones in Future Mobile Networks: 6G Networks. IEEE Access 2021, 9, 12803–12823. [Google Scholar] [CrossRef]
- Sharma, V.; Sabatini, R.; Ramasamy, S. UAVs Assisted Delay Optimization in Heterogeneous Wireless Networks. IEEE Commun. Lett. 2016, 20, 2526–2529. [Google Scholar] [CrossRef]
- Jung, H.; Lee, I.-H.; Joung, J. Security Energy Efficiency Analysis of Analog Collaborative Beamforming With Stochastic Virtual Antenna Array of UAV Swarm. IEEE Trans. Veh. Technol. 2022, 71, 8381–8397. [Google Scholar] [CrossRef]
- Li, C.; Xu, Y.; Xia, J.; Zhao, J. Protecting Secure Communication Under UAV Smart Attack With Imperfect Channel Estimation. IEEE Access 2018, 6, 76395–76401. [Google Scholar] [CrossRef]
- Psilias, D.; Milidonis, A.; Voyiatzis, I. Secure Video Transmission System for UAV Applications. In Proceedings of the PCI ’21: Proceedings of the 25th Pan-Hellenic Conference on Informatics, Athens, Greece, 25–27 November 2022; Vassilakopoulos, M.G., Karanikolas, N.N., Eds.; Association Computing Machinery: New York, NY, USA, 2021; pp. 318–322. [Google Scholar]
- Bai, J.; Dai, J.; Wang, Z.; Yang, S. A Detection Method of the Rescue Targets in the Marine Casualty Based on Improved YOLOv5s. Front. Neurorobot. 2022, 16, 1053124. [Google Scholar] [CrossRef] [PubMed]
- Chen, N.; Li, Y.; Yang, Z.; Lu, Z.; Wang, S.; Wang, J. LODNU: Lightweight Object Detection Network in UAV Vision. J. Supercomput. 2023, 79, 10117–10138. [Google Scholar] [CrossRef]
- Ferrão, I.G.; Espes, D.; Dezan, C.; Branco, K.R.L.J.C. Security and Safety Concerns in Air Taxis: A Systematic Literature Review. Sensors 2022, 22, 6875. [Google Scholar] [CrossRef] [PubMed]
- Herschel, R.; Wallrath, P.; Hofstaetter, M.; Taupe, P.; Krueger, E.; Philippi, M.; Kunze, J.; Rotter, J.M.; Heusinger, V.; Ari, M.; et al. UAV-Borne Remote Sensing for AI-Assisted Support of Search and Rescue Missions. In Proceedings of the Electro-Optical Remote Sensing XVI; Kamerman, G.W., Steinvall, O., Eds.; Spie-The International Society Optical Engineering: Bellingham, WA, USA, 2022; Volume 12272, p. 1227203. [Google Scholar]
- Carrillo, D.; Mikhaylov, K.; Nardelli, P.J.; Andreev, S.; da Costa, D.B. Understanding UAV-Based WPCN-Aided Capabilities for Offshore Monitoring Applications. IEEE Wirel. Commun. 2021, 28, 114–120. [Google Scholar] [CrossRef]
- Liu, C.; Feng, W.; Chen, Y.; Wang, C.-X.; Li, X.; Ge, N. IEEE Process-Oriented Optimization for Beyond 5G Cognitive Satellite-UAV Networks. In Proceedings of the 2020 29th Wireless and Optical Communications Conference (WOCC), Newark, NJ, USA, 1–2 May 2020; pp. 145–150. [Google Scholar]
- Jurado, J.M.; Lopez, A.; Padua, L.; Sousa, J.J. Remote Sensing Image Fusion on 3D Scenarios: A Review of Applications for Agriculture and Forestry. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 102856. [Google Scholar] [CrossRef]
- Zhao, J.; Chen, Y.; Zhou, Z.; Zhao, J.; Wang, S.; Chen, X. Multiship Speed Measurement Method Based on Machine Vision and Drone Images. IEEE Trans. Instrum. Meas. 2023, 72, 2513112. [Google Scholar] [CrossRef]
- Zhao, J.; Chen, Y.; Zhou, Z.; Zhao, J.; Wang, S.; Chen, X. Extracting Vessel Speed Based on Machine Learning and Drone Images during Ship Traffic Flow Prediction. J. Adv. Transp. 2022, 2022, 3048611. [Google Scholar] [CrossRef]
- Santos, N.P.; Lobo, V.; Bernardino, A. Autoland Project: Fixed-Wing UAV Landing on a Fast Patrol Boat Using Computer Vision. In OCEANS 2019 MTS/IEEE SEATTLE; IEEE: New York, NY, USA, 2019. [Google Scholar]
- Zhou, F.; Pan, S.; Jiang, J. Verification of AIS Data by Using Video Images Taken by a UAV. J. Navig. 2019, 72, 1345–1358. [Google Scholar] [CrossRef]
- Lindsay, J.; Ross, J.; Seto, M.L.; Gregson, E.; Moore, A.; Patel, J.; Bauer, R. Collaboration of Heterogeneous Marine Robots Toward Multidomain Sensing and Situational Awareness on Partially Submerged Targets. IEEE J. Ocean. Eng. 2022, 47, 880–894. [Google Scholar] [CrossRef]
- Siewert, S.; Angoth, V.; Krishnamurthy, R.; Mani, K.; Mock, K.; Singh, S.B.; Srivistava, S.; Wagner, C.; Claus, R.; Vis, M.D. Software Defined Multi-Spectral Imaging for Arctic Sensor Networks. In Proceedings of the Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XXII; Velez Reyes, M., Messinger, D.W., Eds.; Spie-The International Society Optical Engineering: Bellingham, WA, USA, 2016; Volume 9840, p. 98401V. [Google Scholar]
- Guo, J.; Gao, H.; Liu, Z.; Huang, F.; Zhang, J.; Li, X.; Ma, J. ICRA: An Intelligent Clustering Routing Approach for UAV Ad Hoc Networks. IEEE Trans. Intell. Transp. Syst. 2023, 24, 2447–2460. [Google Scholar] [CrossRef]
- Dai, M.; Wu, Y.; Qian, L.; Su, Z.; Lin, B.; Chen, N. UAV-Assisted Multi-Access Computation Offloading via Hybrid NOMA and FDMA in Marine Networks. IEEE Trans. Netw. Sci. Eng. 2023, 10, 113–127. [Google Scholar] [CrossRef]
- Gomez, L.; Ibrahim, A.S.S. Design, Analysis and Simulation of Microstrip Antenna Arrays with Flexible Substrate in Different Frequency, for Use in UAV-Assisted Marine Communications. J. Mar. Sci. Eng. 2023, 11, 730. [Google Scholar] [CrossRef]
- Guo, F.; Wei, M.; Ye, M.; Li, J.; Mechali, O.; Cao, Y. An Unmanned Aerial Vehicles Collaborative Searching and Tracking Scheme in Three-Dimension Space. In Proceedings of the 2019 IEEE 9th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Suzhou, China, 29 July–2 August 2019; IEEE: New York, NY, USA, 2019; pp. 1262–1266. [Google Scholar]
- Liu, J.; Shi, T.; Li, P.; Ren, X.; Ma, H. Trajectories Planning for Multiple UAVs by the Cooperative and Competitive PSO Algorithm. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Republic of Korea, 28 June–1 July 2015; IEEE: New York, NY, USA, 2015; pp. 107–114. [Google Scholar]
Figure 1.
The flowchart of this paper.
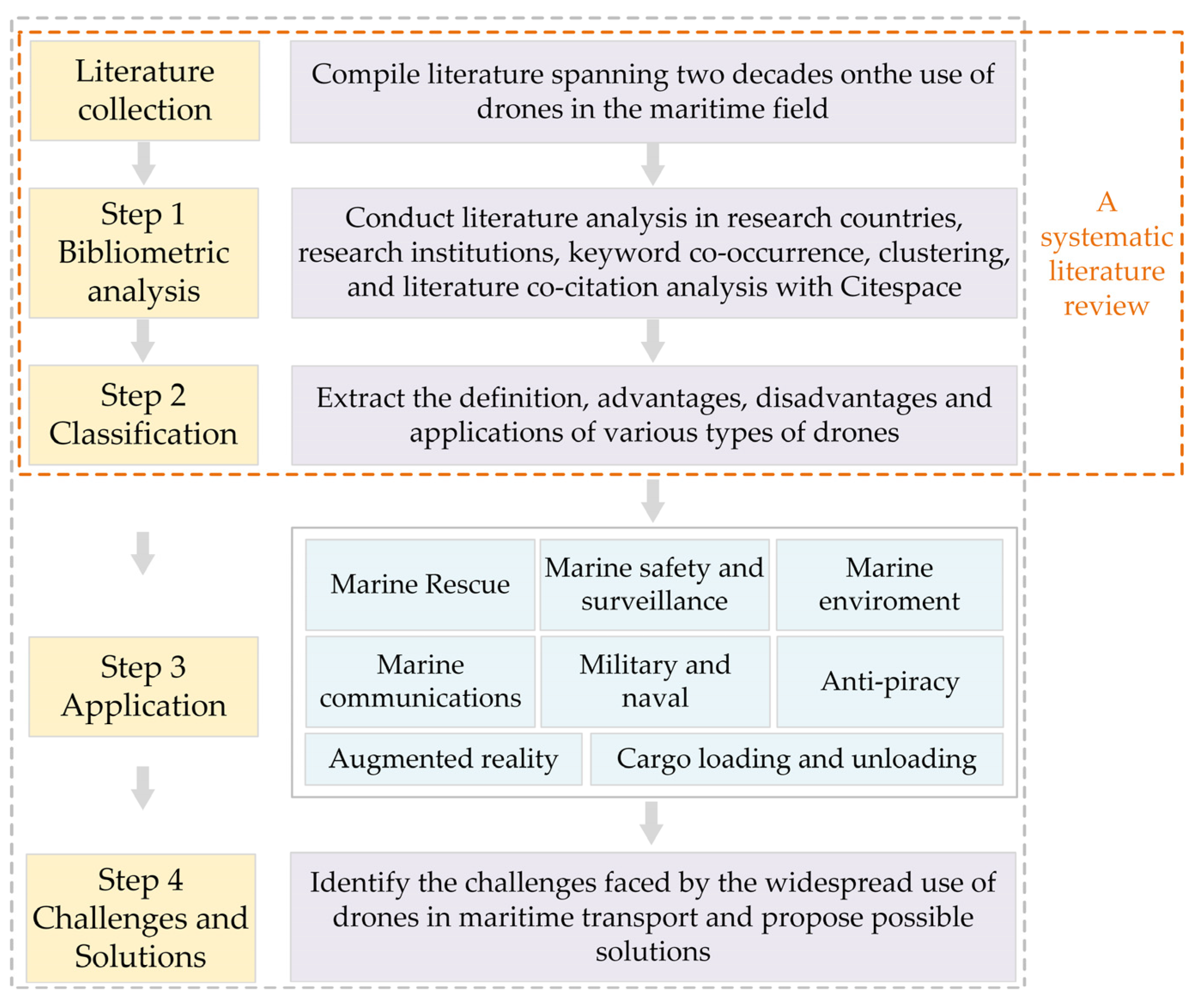
Figure 2.
Visualisation of the main research countries.
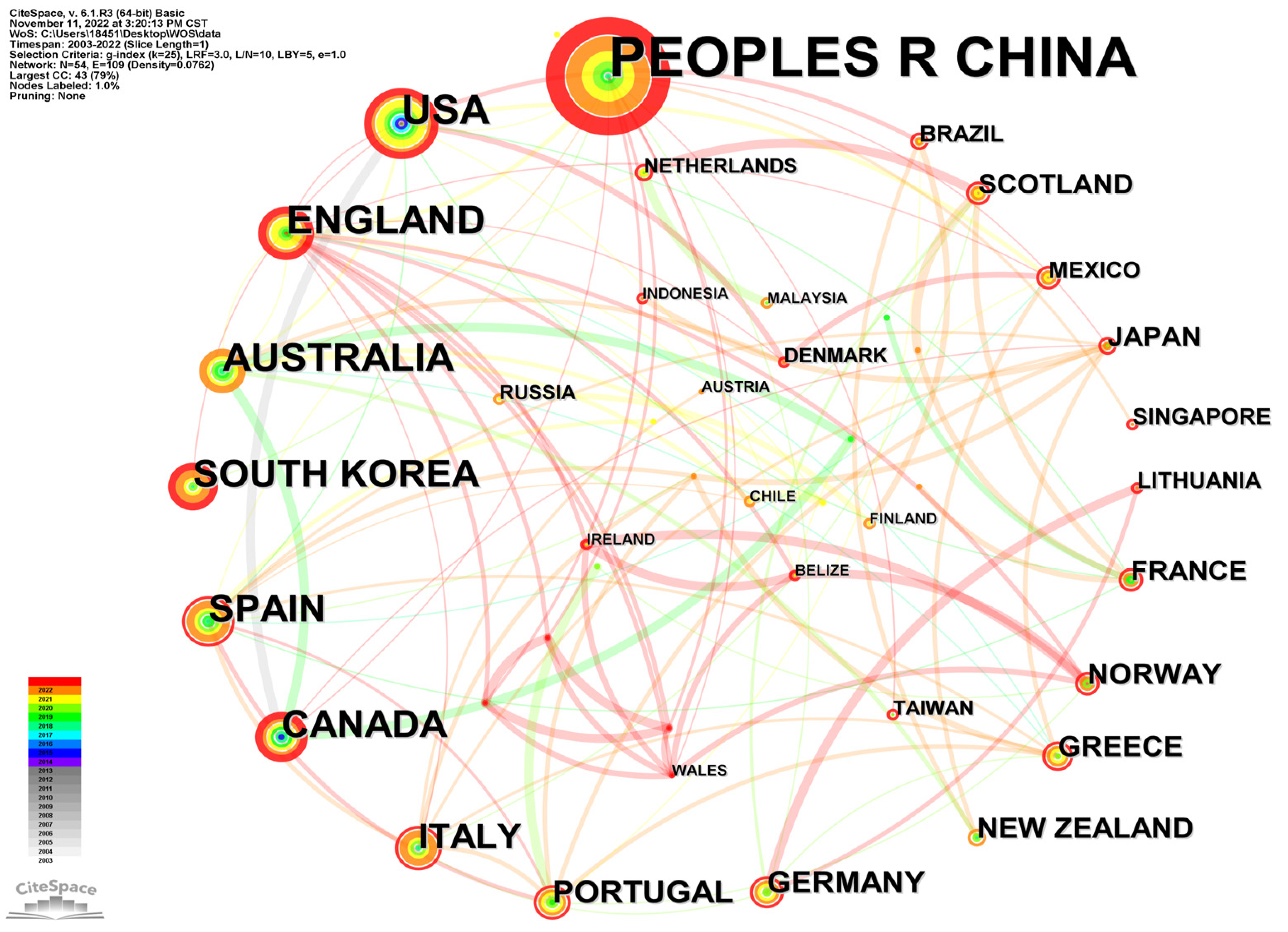
Figure 3.
Visualisation of the network of core research institutions.
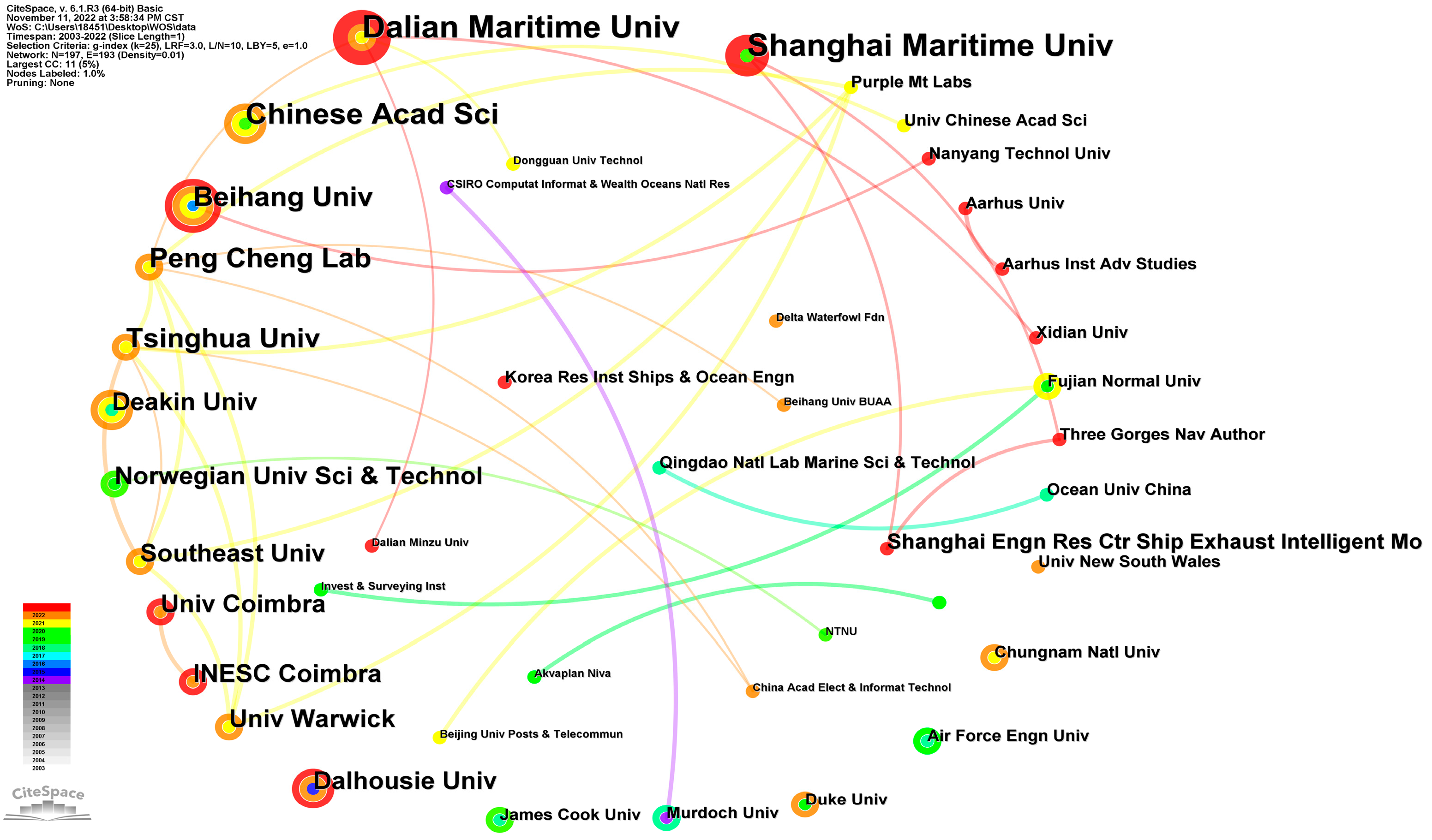
Figure 4.
Visualisation of keyword co-occurrence analysis.
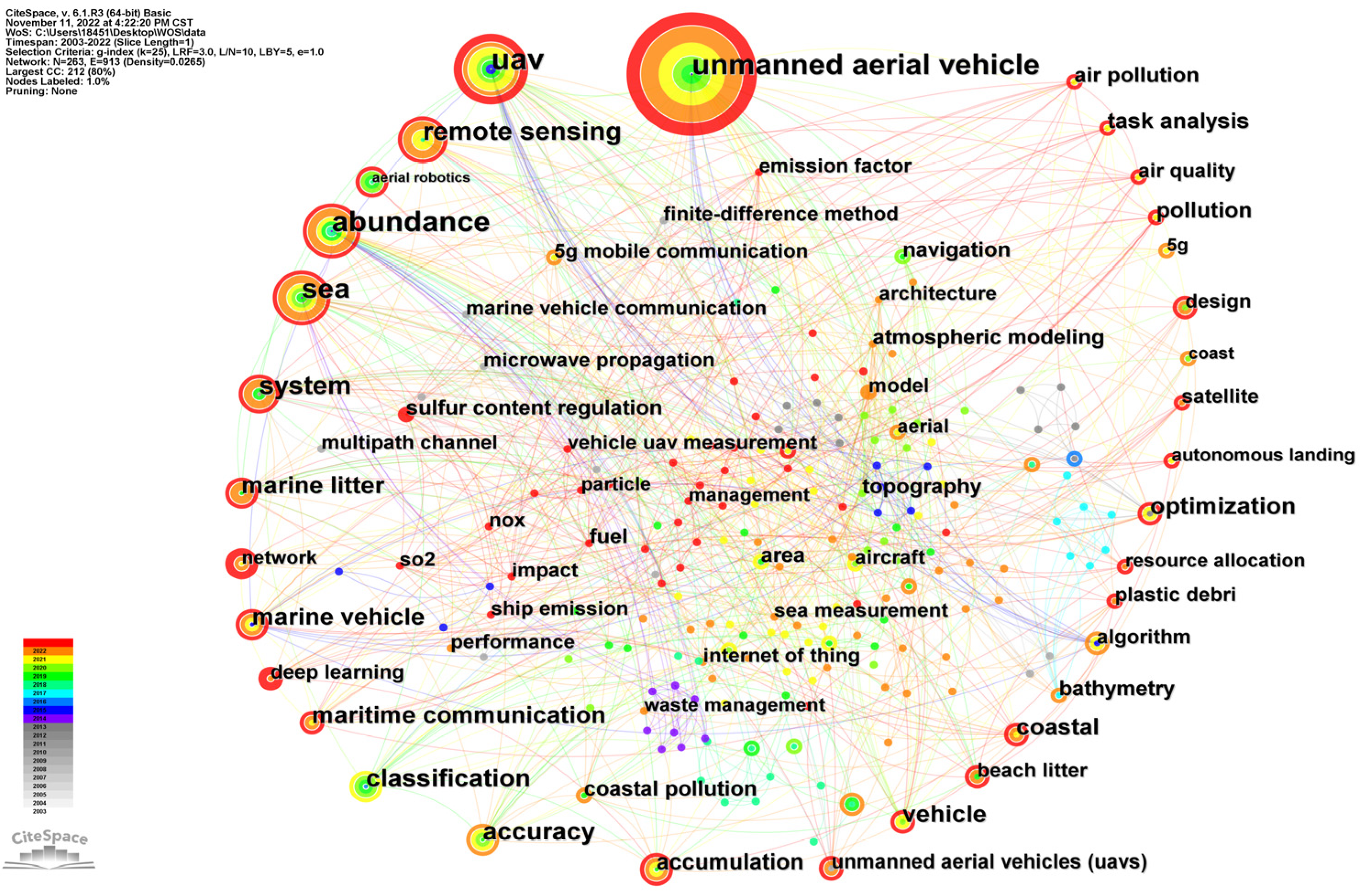
Figure 5.
Visualisation of keyword clustering.
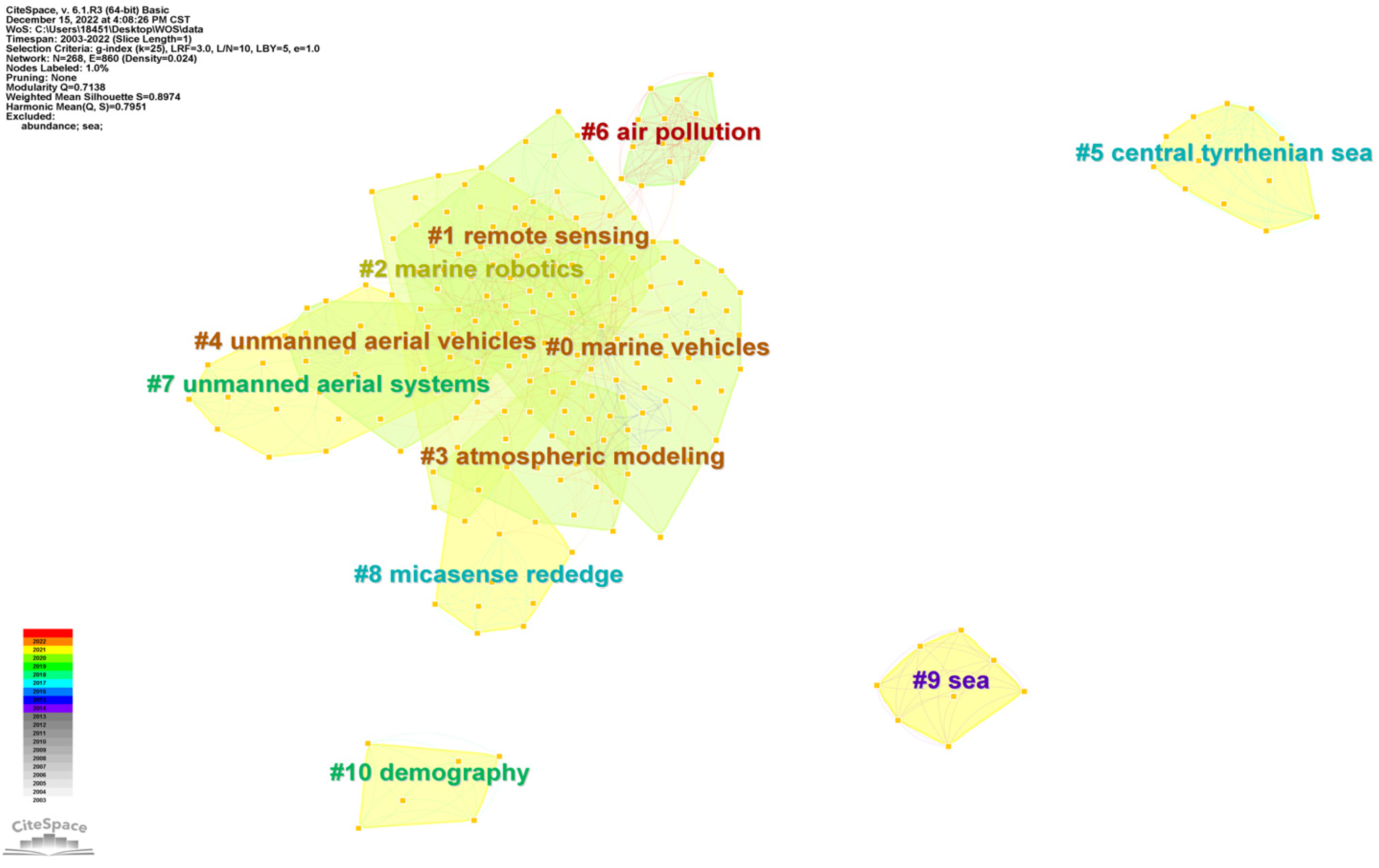
Figure 6.
Visualisation of the co-citation clustering of literature (the corresponding seven references in the figure are [54,55,56,57,58,59,60]).
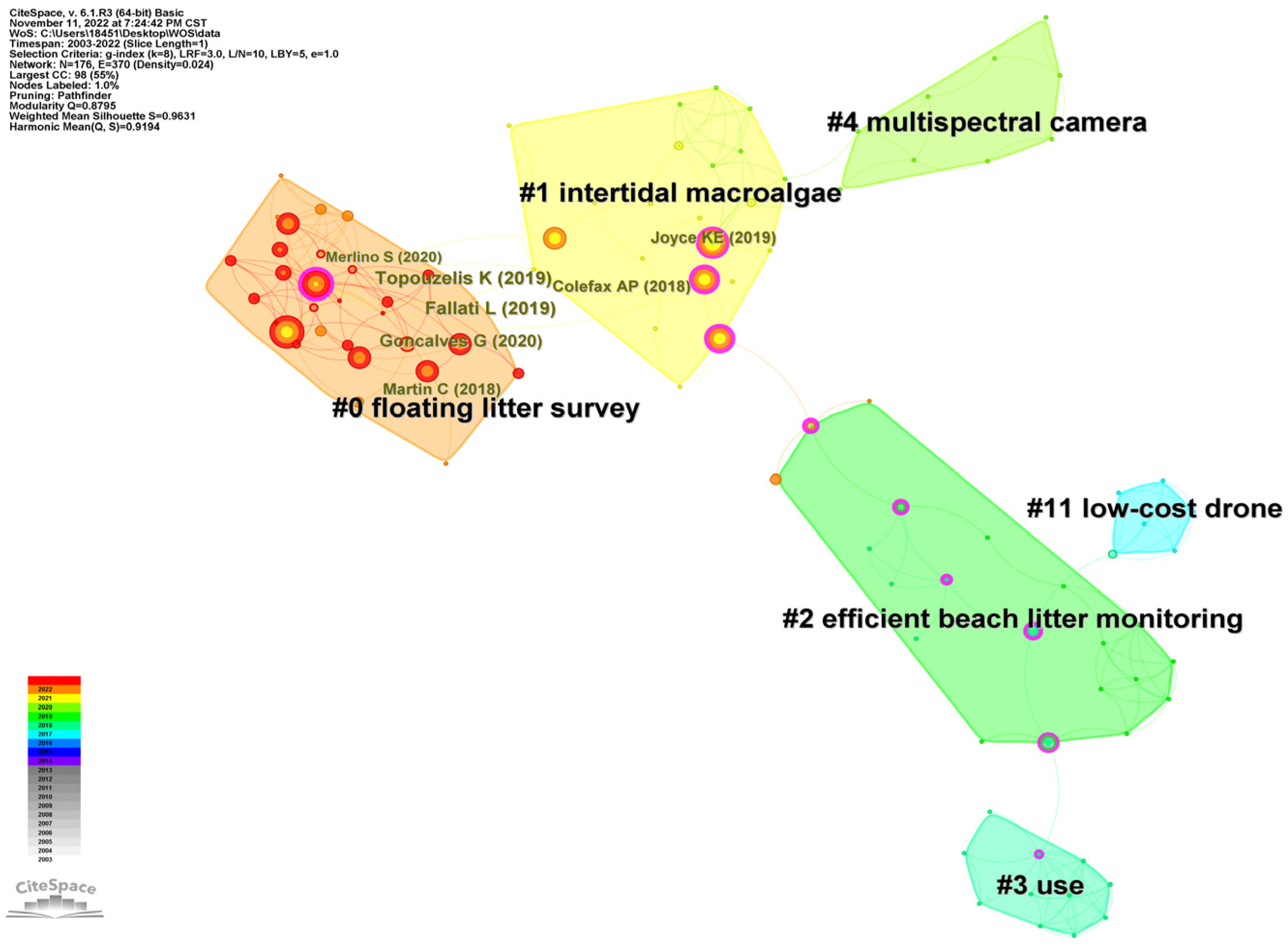
Figure 7.
The flowchart of the proposed methodology.
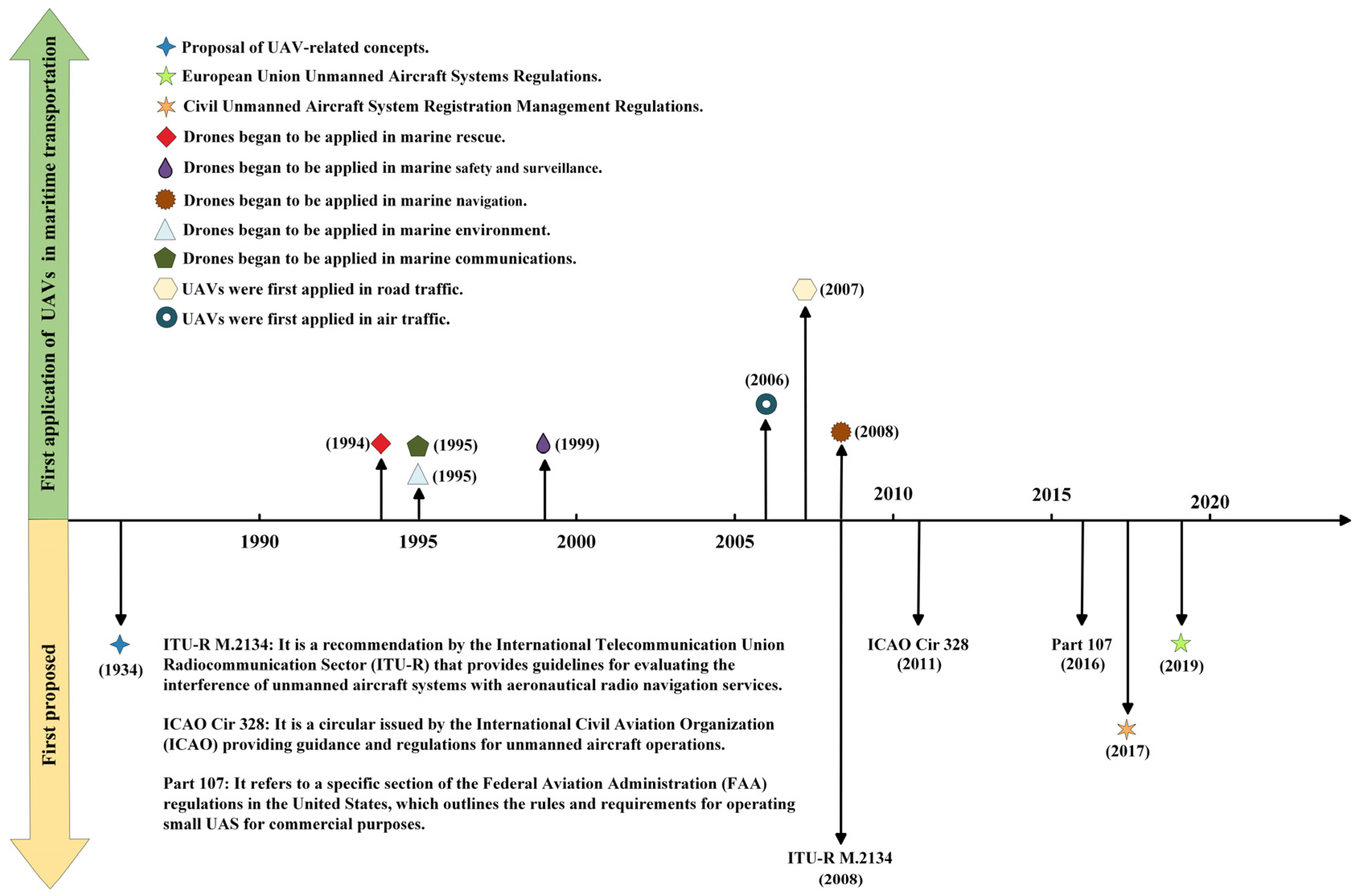

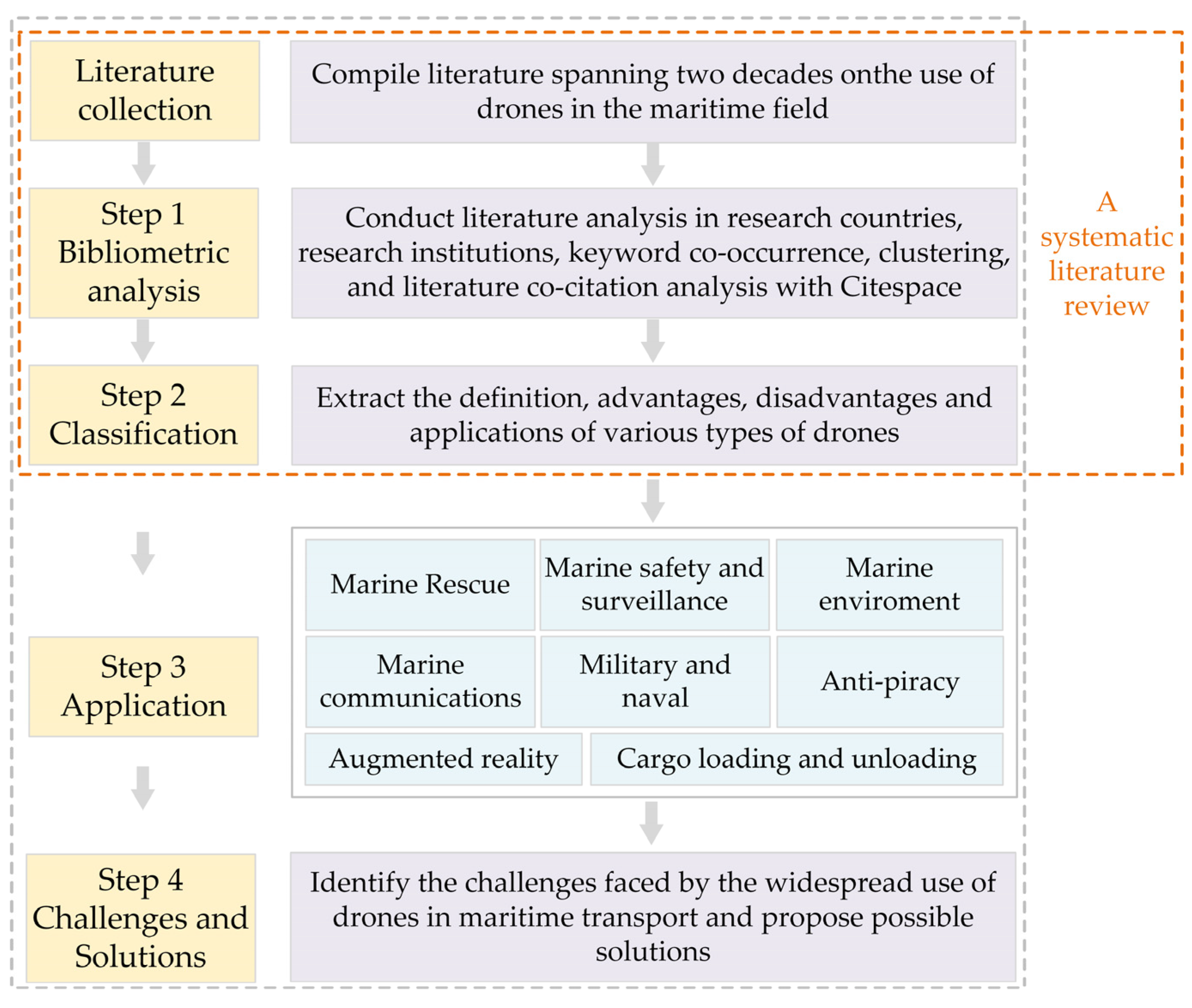{kind=link}
{kind=link}
{kind=link}
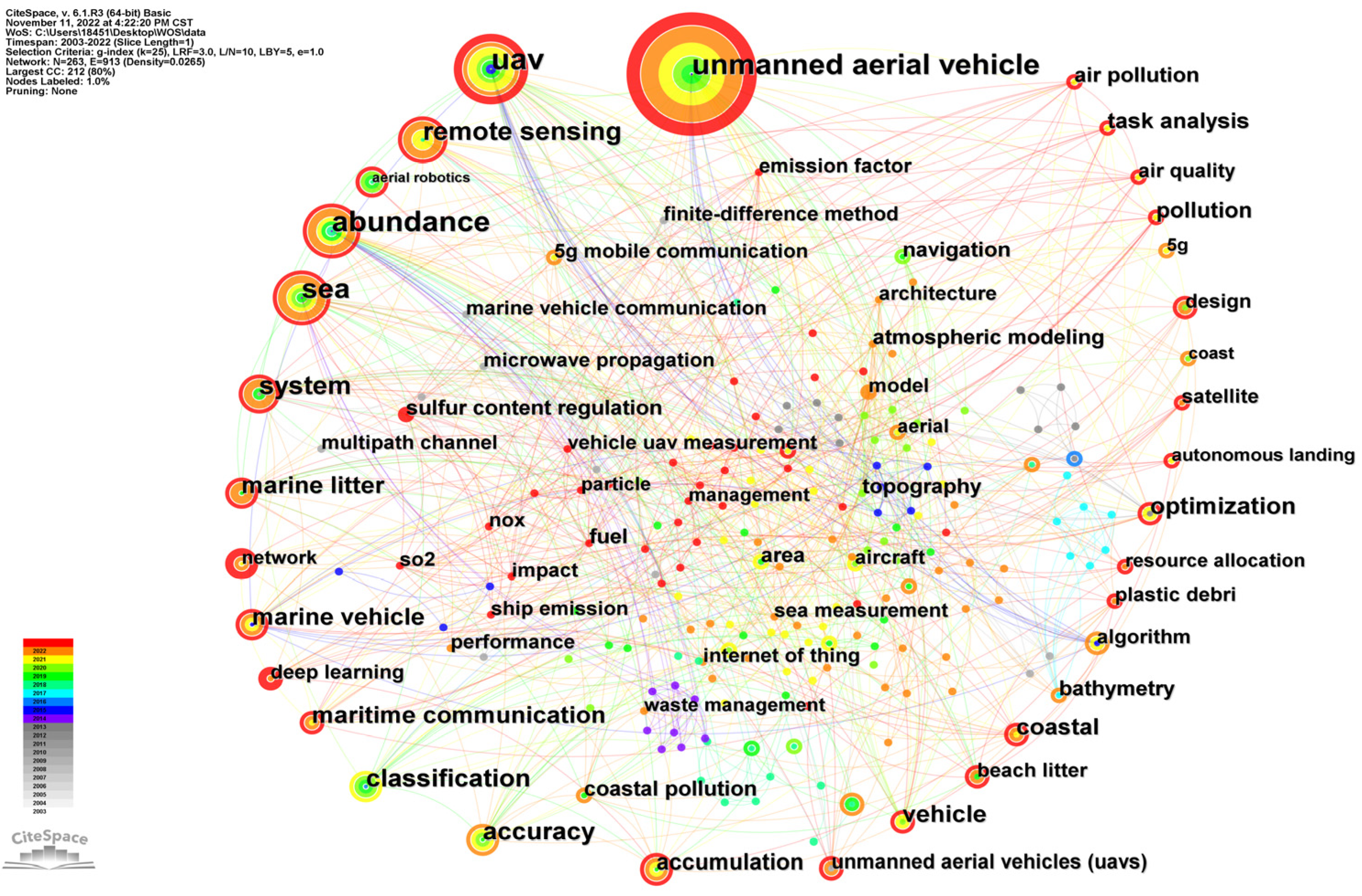{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
The details and features of different categories of drones.
| Categories | References | Characteristics | Advantages | Disadvantages | Applications |
|---|---|---|---|---|---|
| Fixed-wing drones | [33,34,35,36,37,38] | Fixed-wing positions, swept-back angles, and simplified maintenance. | 1. Higher flight speeds; 2. Longer flight times; 3. Ability to accommodate larger sensors and cameras; 4. Expanded range of applications. | 1. Require larger take-off and landing sites; 2. Lack of hovering capabilities, limiting continuous image capture. | 1. Marine patrols; 2. Marine violation identification; 3. Real-time reporting to ground control stations; 4. Ship escorting. |
| Rotary-wing drones | [18,39,40,41] | 1. Feature rotor shafts for lift generation; 2. Obtain lift from continuously rotating blades; 3. Similar to helicopters in their lift-off principle. | 1. Vertical take-off and landing capabilities; 2. Ability to hover for precise image capture and data collection in specific areas | 1. More complex maintenance compared to fixed-wing drones; 2. Limited endurance, resulting in slower flight speed and reduced range. | 1. Marine monitoring; 2. Marine rescue operations; 3. Pollution forensics. |
| Unmanned airships | [42,43,44,45] | 1. Utilise internal gas lighter than air; 2. Consist of a hull, tail surface, pod, and propulsion unit; 3. Use the same lift-off principle as balloons but capable of powered flight and manoeuvring. | 1. Long endurance due to reliance on lift principles, not limited by fuel; 2. Convenient departure and docking without requiring take-off or landing. | 1. Vulnerable to high winds due to lighter-than-air nature; 2. Crosswinds can deplete their fuel; 3. Slower flight speeds due to larger size and greater air resistance. | 1. Extended missions such as port and maritime patrols; 2. Functioning as command centres for port and rescue operations; 3. Overseeing ships arriving in port from the air; 4. Scanning entire accident sites during significant maritime disasters. |
| Para-wing drones | [46,47,48] | 1. Employ a flexible air-foil made of a stamped wing parachute; 2. Use a propeller engine for propulsion; 3. Reduced weight for longer flight times. | 1. Longer flight times due to reduced weight; 2. Ability to glide effortlessly in complex air currents at low altitudes; 3. Versatile launch methods; 4. Capability to take off and land on challenging runways. | 1. Limited flight altitude due to lower lift provided by the stamped wing parachute. | 1. Transportation of marine rescue supplies. |
| Fluttering drones | [49,50,51,52,53] | 1. Mimic flight patterns of birds or insects; 2. Can be classified into insect-like or bird-like designs. | 1. High mobility and integration with corresponding sensors; 2. Potential to be communication relays and monitor the marine environment. | 1. Bird-like drones require consideration of range and lift. | 1. Maritime military field, especially for long-range observation and night surveillance; 2. Protection of the marine environment; 3. Ensuring maritime security. |
Table 2.
Top 10 countries in unmanned maritime drone research.
| Number of the Papers | Country | Centrality |
|---|---|---|
| 68 | China | 0.25 |
| 20 | USA | 0.26 |
| 17 | England | 0.23 |
| 16 | Australia | 0.09 |
| 15 | South Korea | 0.01 |
| 14 | Spain | 0.25 |
| 14 | Canada | 0.02 |
| 12 | Italy | 0.11 |
| 9 | Portugal | 0.11 |
| 8 | Germany | 0.08 |
Table 3.
Keywords with high frequency in maritime drone research.
| Year | Frequent | Centrality | Keyword |
|---|---|---|---|
| 2009 | 12 | 0.23 | System |
| 2012 | 73 | 0.61 | Unmanned aerial vehicle |
| 2012 | 6 | 0.04 | Optimization |
| 2014 | 8 | 0.04 | Marine vehicle |
| 2015 | 7 | 0.10 | Classification |
| 2017 | 19 | 0.14 | Remote sensing |
| 2018 | 10 | 0.09 | Marine litter |
| 2019 | 6 | 0.05 | Vehicle |
| 2019 | 6 | 0.02 | Design |
| 2020 | 9 | 0.02 | Network |
| 2020 | 7 | 0.04 | Maritime communication |
| 2020 | 6 | 0.04 | Coastal |
| 2021 | 8 | 0.03 | Deep learning |
| 2021 | 6 | 0.03 | Model |
Table 4.
Top 5 keyword clusters for drone research in the maritime industry.
| Cluster | Size | Silhouette Coefficient | Year | Top Terms (LLR) |
|---|---|---|---|---|
| #0 | 51 | 0.909 | 2018 | Marine vehicles |
| #1 | 42 | 0.813 | 2019 | Remote sensing |
| #2 | 23 | 0.867 | 2019 | Marine robotics |
| #3 | 21 | 0.943 | 2020 | Atmospheric modelling |
| #4 | 19 | 0.921 | 2013 | UAVs |
Table 5.
Top 5 most cited papers with their co-citation frequency.
| Citation Count | Reference | Title |
|---|---|---|
| 15 | Gonçalves et al. (2020) [57] | Mapping marine litter using Unmanned Aircraft System (UAS) on a beach-dune system: A multidisciplinary approach |
| 15 | Fallati et al. (2019) [56] | Anthropogenic Marine Debris assessment with Unmanned Aerial Vehicle imagery and deep learning: A case study along the beaches of the Republic of Maldives |
| 15 | Topouzelis et al. (2019) [55] | Detection of floating plastics from satellite and unmanned aerial systems (Plastic Litter Project 2018) |
| 12 | Colefax et al. (2018) [59] | The potential for UAVs to conduct marine fauna surveys in place of manned aircraft |
| 12 | Martin et al. (2018) [58] | Use of UAVs for efficient beach litter monitoring |
Table 6.
Technical challenges and solutions associated with the use of drones in maritime transport.
Table 6.
Technical challenges and solutions associated with the use of drones in maritime transport.
| System | Challenges | Solutions |
|---|---|---|
| Flight control system | 1. Limitations of fault-tolerant control laws with restricted control inputs 2. Inadequate infrastructure at sea for UAV recovery | 1. Develop control algorithms that can effectively deal with the physical properties of the actuator motor. 2. Investigating drone autonomous ship landing technology. |
| Navigation system | 1. The accuracy, size, and power consumption of inertial guidance systems are not suitable for drones. 2. The unreliability of single guidance technology. | 1. Research on miniaturised and low-power inertial guidance technology for drones. 2. Investigate the performance of combining multiple navigation technologies. |
| Power system | 1. Fuel Engines: Retrofitting and automatic onboard starting of conventional engines in UAV applications | 1-1 Install an electric starter motor. 1-2 Installing an engine monitoring system. |
| 2. Hybrid Power: Coupling and integrated control technology of gasoline-electric power generation | 2-1 Integrate software and hardware. 2-2 Optimised Design Powertrain. | |
| 3. Propellers: Focus on the pitch and locking technology | 3-1 Develop locking mechanisms 3-2 Integrate with flight control systems | |
| 4. Electric Motors: Fault-tolerant motor control | 4-1 Use redundant components to improve fault tolerance. | |
| Communication system | 1. Achieving high-speed and low-latency data interaction between drones and other networks 2. Security concerns for UAV communications | 1. Research on technical solutions to improve data interaction. 2. Research on secure communication transmission and overcoming active jamming attacks. |
| Vision system | 1. Security concerns with vision sensors 2. Limitations of computing power for lightweight vision algorithms | 1. Study encryption techniques for drone communications. 2. Development of lightweight vision algorithms without sacrificing quality or speed. |
Table 7.
Challenges of and solutions to the use of drones in the future maritime transport.
| Application | Challenges | Solutions |
|---|---|---|
| Marine rescue | 1. Difficulties in transferring injured individuals at sea during rescue operations. 2. Cloud and rain interfere with target recognition. | 1. Research on medical drones for transportation purposes. 2. Develop radar-forming equipment that can penetrate clouds and rain. |
| Marine safety and surveillance | 1. Data transfer capability for maritime surveillance during drone surveillance is limited by distance. 2. Developing data processing and data fusion techniques for maritime drone surveillance. 3. Practical cooperation between drones and existing maritime supervision equipment. | 1. Further research to improve the security and reliability of UAV data transmission. 2. Integrate vessel behaviour monitored by drones with vessel information obtained using the AIS. 3. Establish a 3D maritime supervision system with VTS as the centre of supervision. |
| Marine navigation | 1. Inefficient process for measuring hull structures. 2. Errors in using drones to inspect hull structural flaws. 3. A high probability of errors in the manual control of drones to inspect the cabin. | 1. Develop automated technologies for measuring hull structure thickness using drones. 2. Integrate multiple vision technologies such as automatic image recognition and measurement. 3. Utilise computer vision techniques to facilitate smooth and practical autonomous tracking flight of drones inside the cabin. |
| Marine environment | 1. Remote sensing data acquisition of a single UAV is no longer sufficient to meet the actual needs of coastal environmental monitoring. 2. The limited coverage area of a single drone. | 1. Combine multiple loads to acquire remote sensing data. 2. The self-organising network technology can be used to enable multiple drones to work together. |
| Marine communications | 1. Effectively deploying drones in the presence of interference. 2. All drones fly at the same fixed altitude when planning their trajectory. | 1. Find ways to eliminate interference between drones. 2. Investigate how drones can explore arbitrary routes in three dimensions. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Wang, J.; Zhou, K.; Xing, W.; Li, H.; Yang, Z. Applications, Evolutions, and Challenges of Drones in Maritime Transport. J. Mar. Sci. Eng. 2023, 11, 2056. https://doi.org/10.3390/jmse11112056
AMA Style
Wang J, Zhou K, Xing W, Li H, Yang Z. Applications, Evolutions, and Challenges of Drones in Maritime Transport. Journal of Marine Science and Engineering. 2023; 11(11):2056. https://doi.org/10.3390/jmse11112056
Chicago/Turabian StyleWang, Jingbo, Kaiwen Zhou, Wenbin Xing, Huanhuan Li, and Zaili Yang. 2023. "Applications, Evolutions, and Challenges of Drones in Maritime Transport" Journal of Marine Science and Engineering 11, no. 11: 2056. https://doi.org/10.3390/jmse11112056
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.