

An Adaptive Control Strategy for Underwater Wireless Charging System Output Power with an Arc-Shaped Magnetic Core Structure


Abstract
:1. Introduction
- (1)
- Most of the studies and analyses are on SS type compensation circuits, other topologies were rarely studied.
- (2)
- Some recognition algorithms have low accuracy and long recognition times.
- (3)
- Part of the identification method requires multiple switching of the system operating frequency and additional auxiliary mechanisms, which increases the complexity of the system.
- (4)
- There is not an in-depth study that takes into account mutual inductance and load detection, including efficient closed-loop control, performance analysis, etc.
2. Optimization of the MC
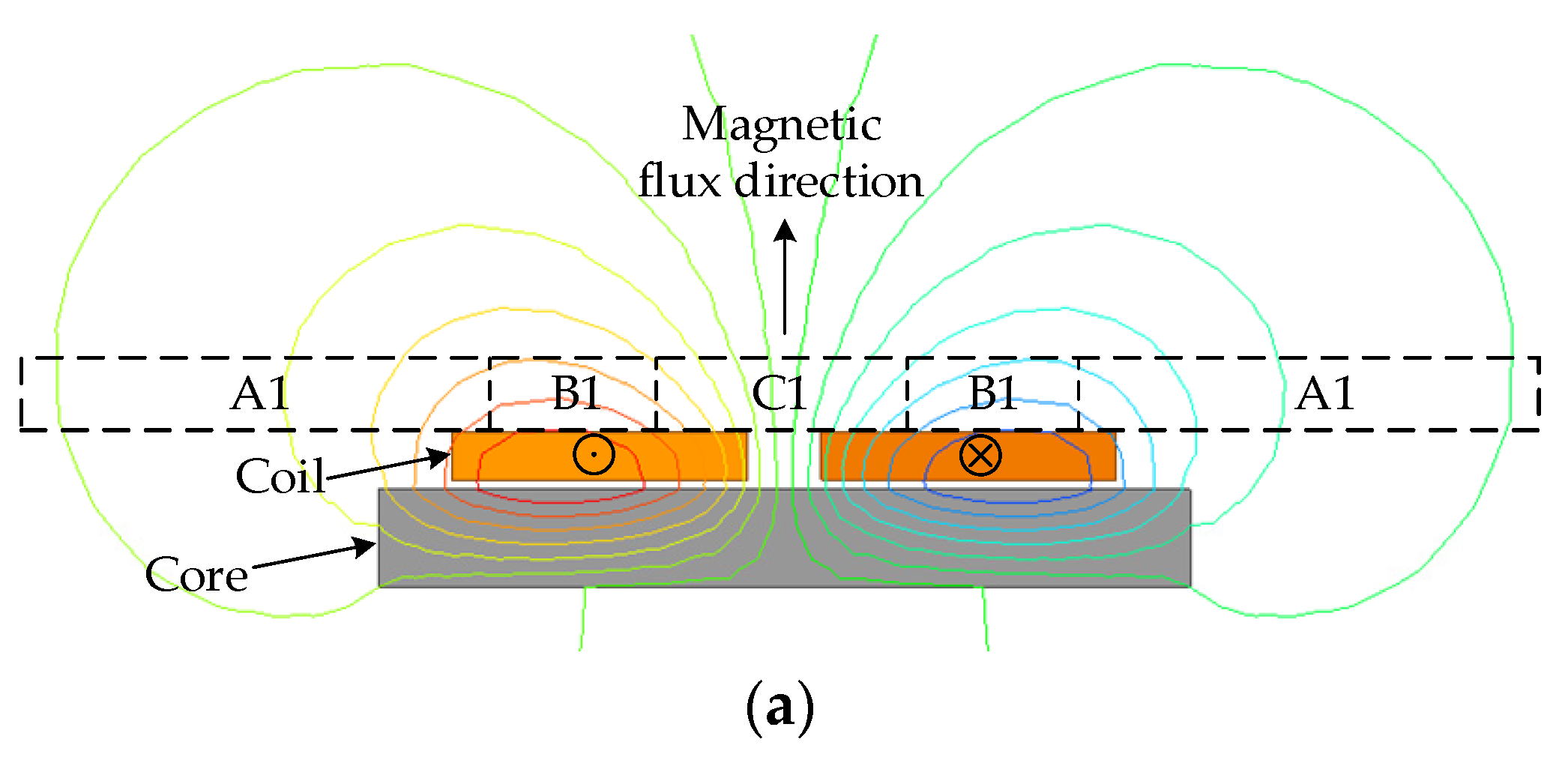
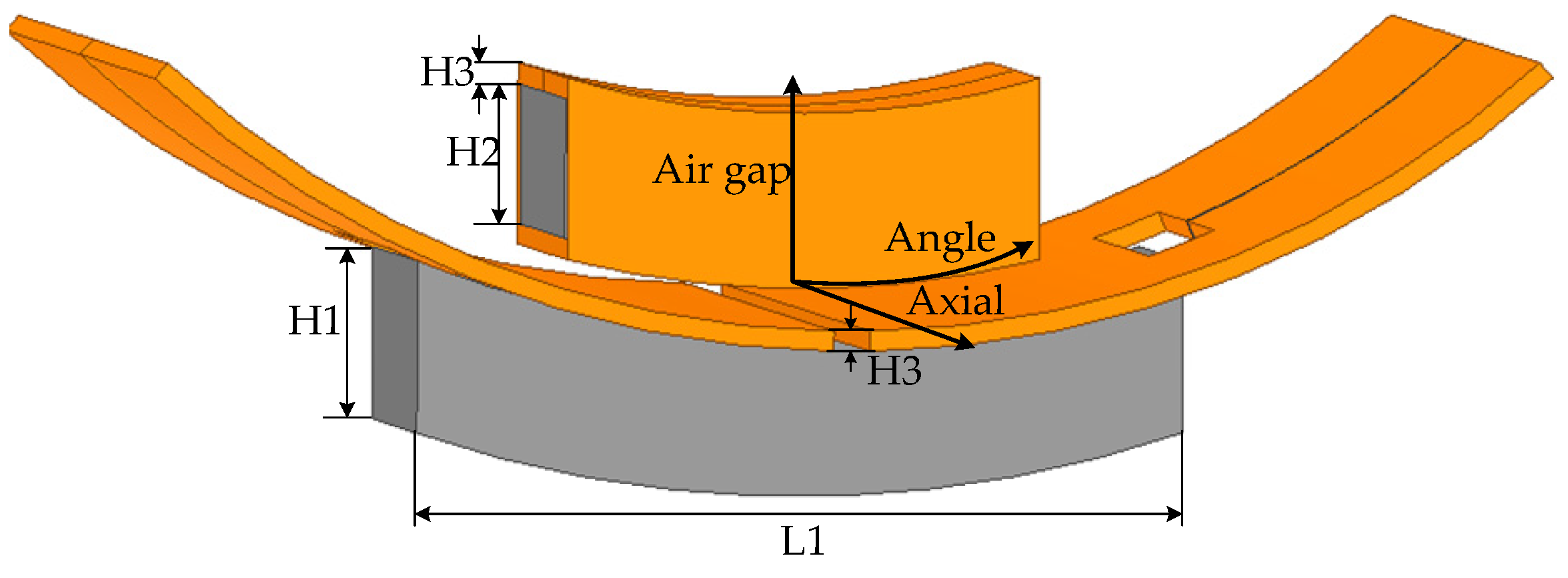
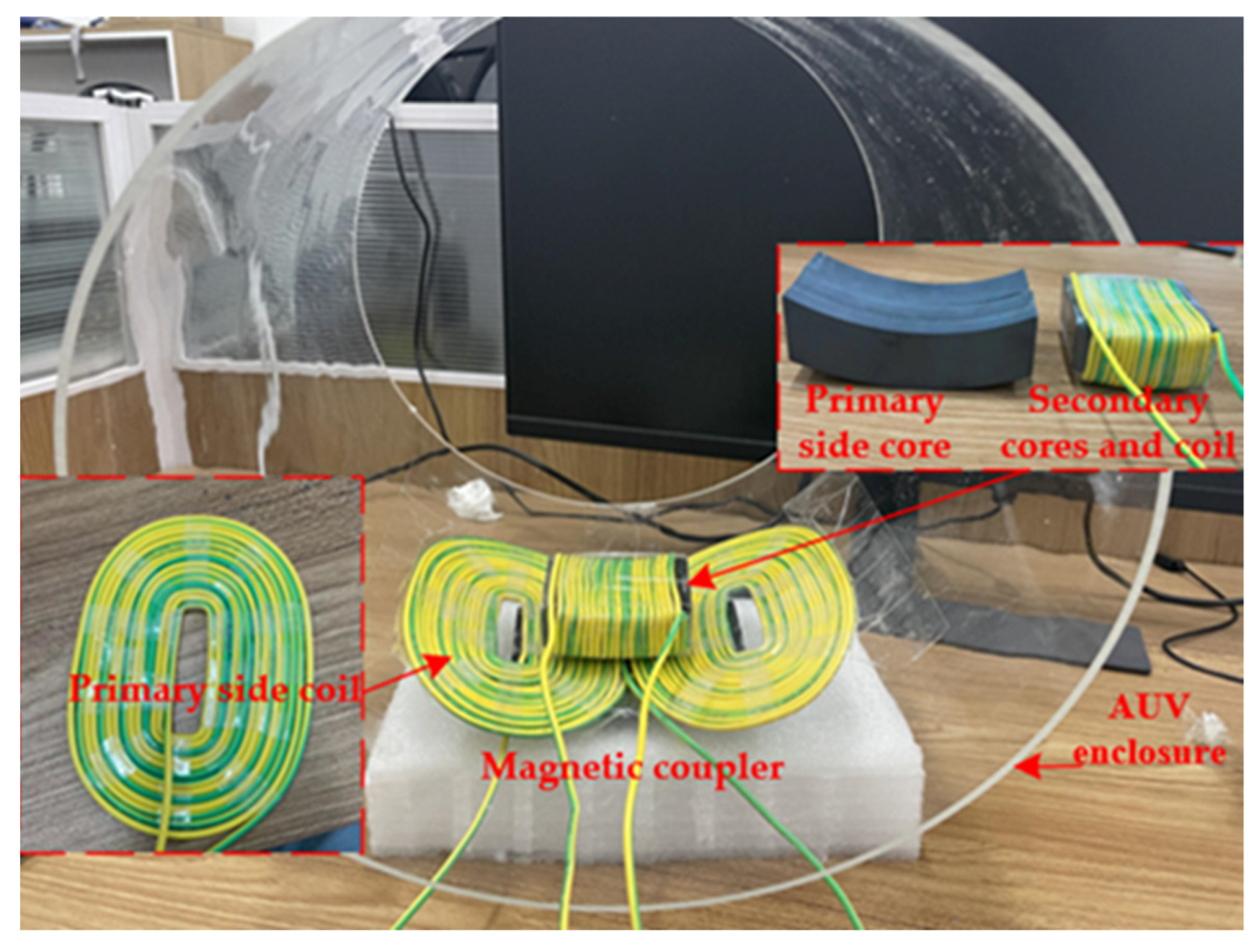
2.1. Analysis and Design of the Proposed MC
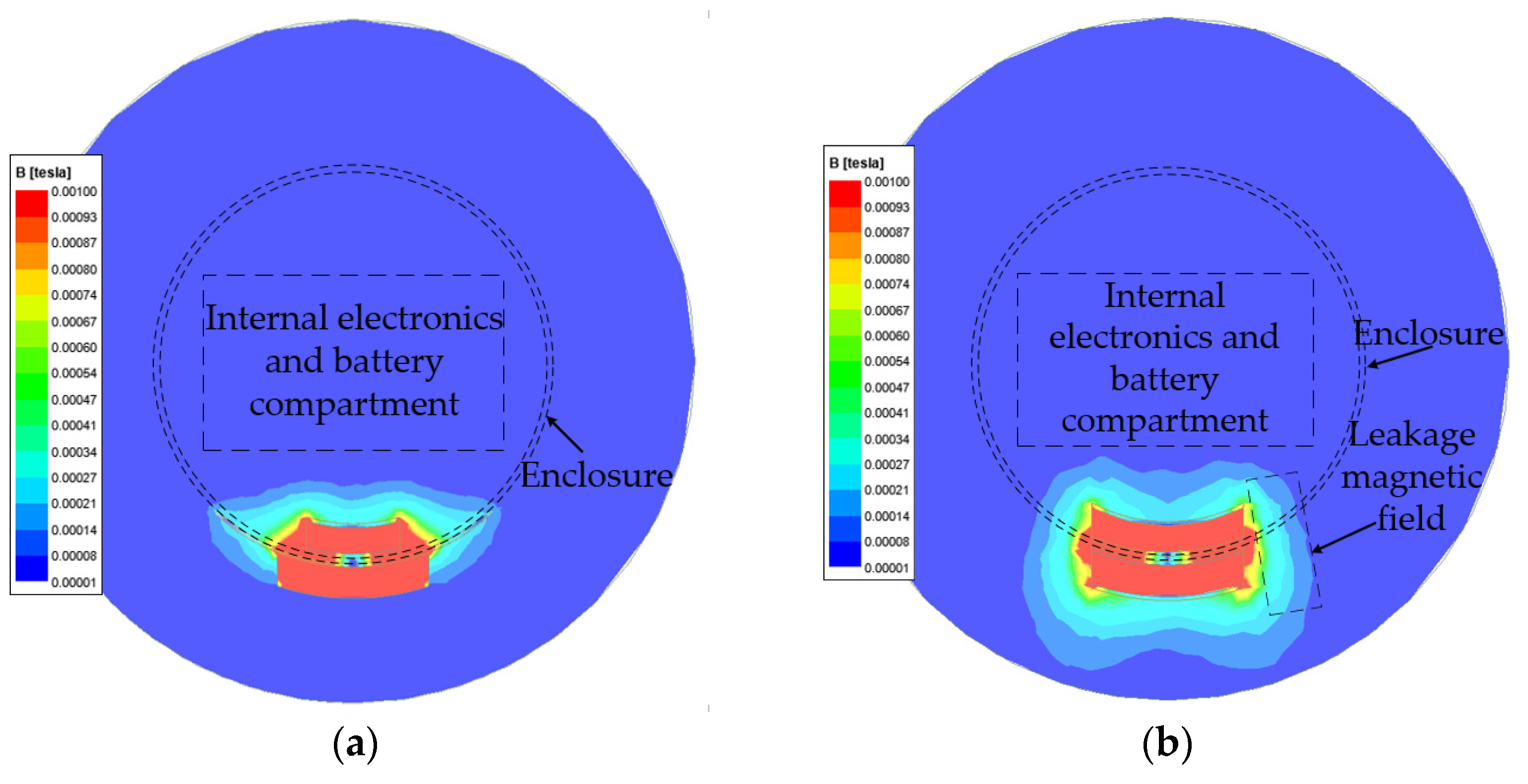
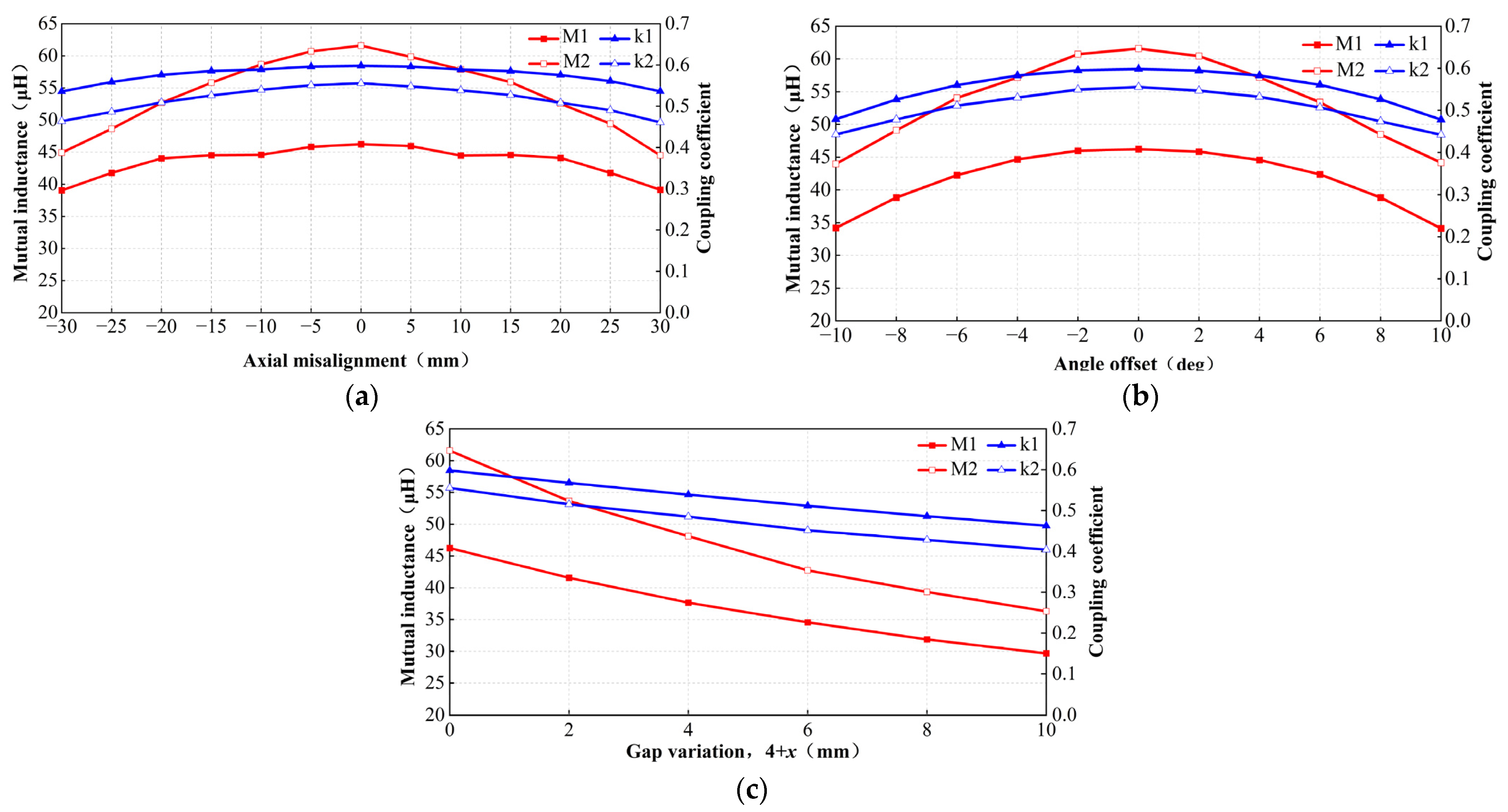
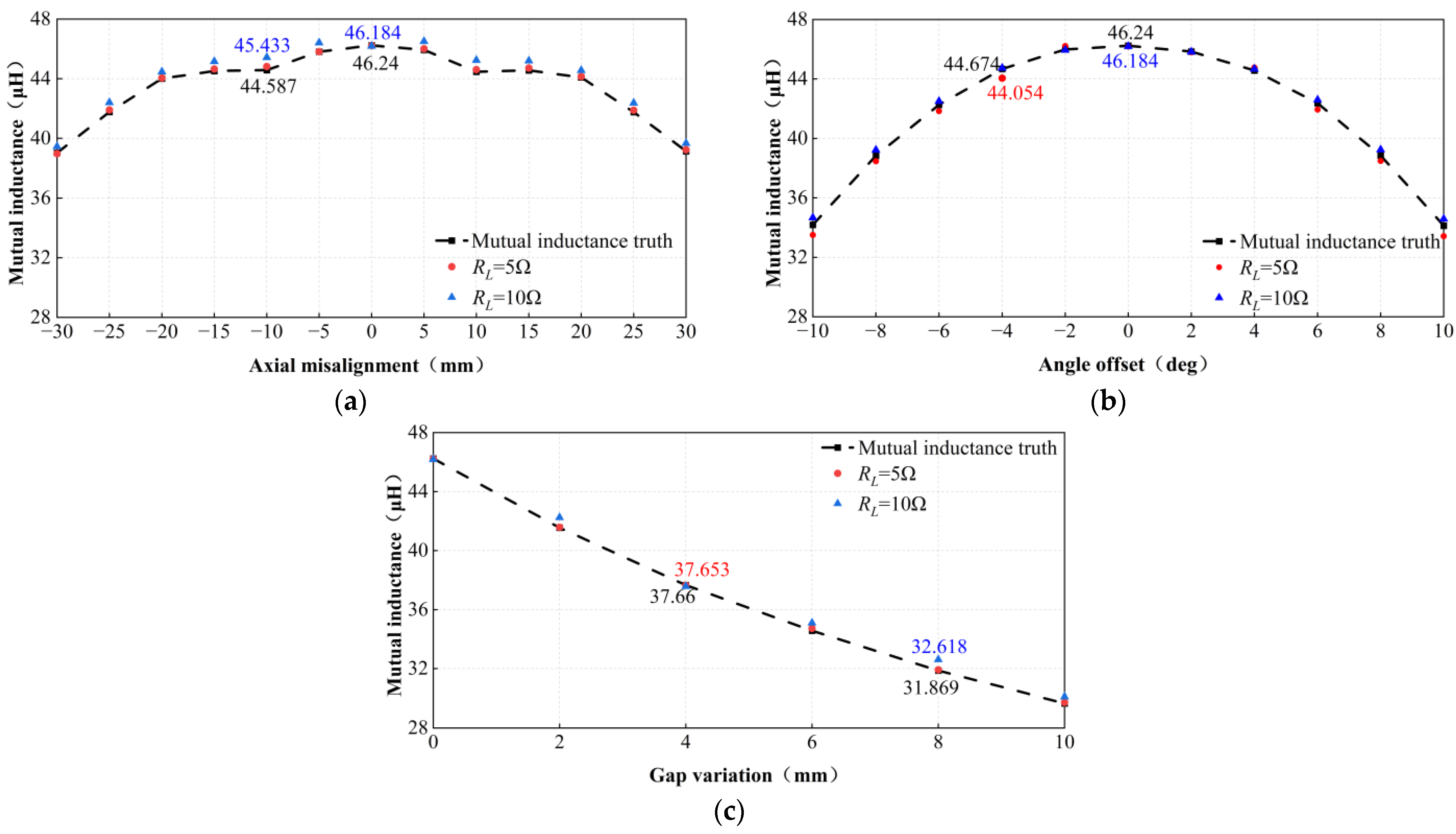
2.2. Performance Analysis and Misalignment Experiments
3. System Introduction and Mathematical Modeling
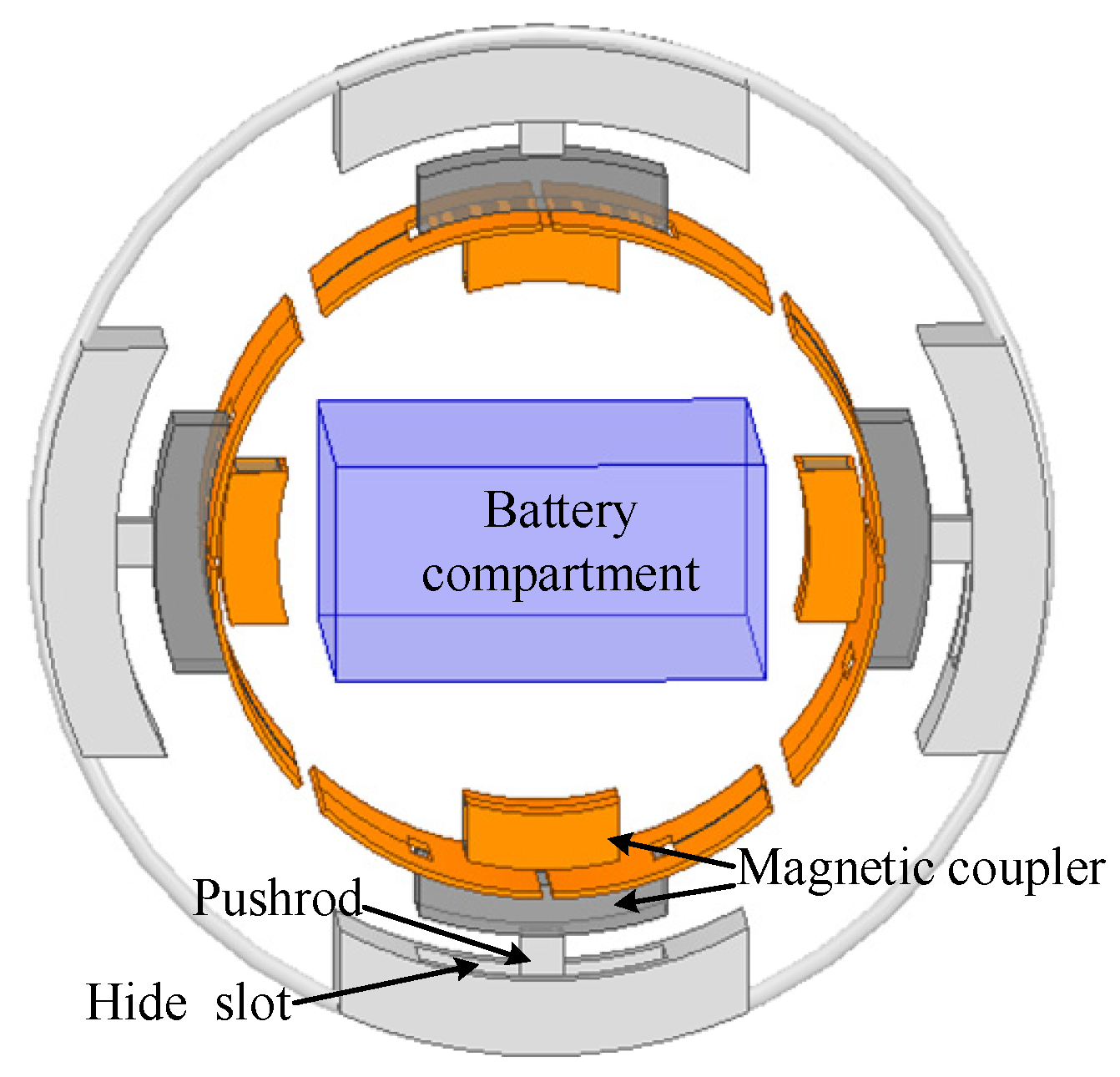
3.1. System Overview
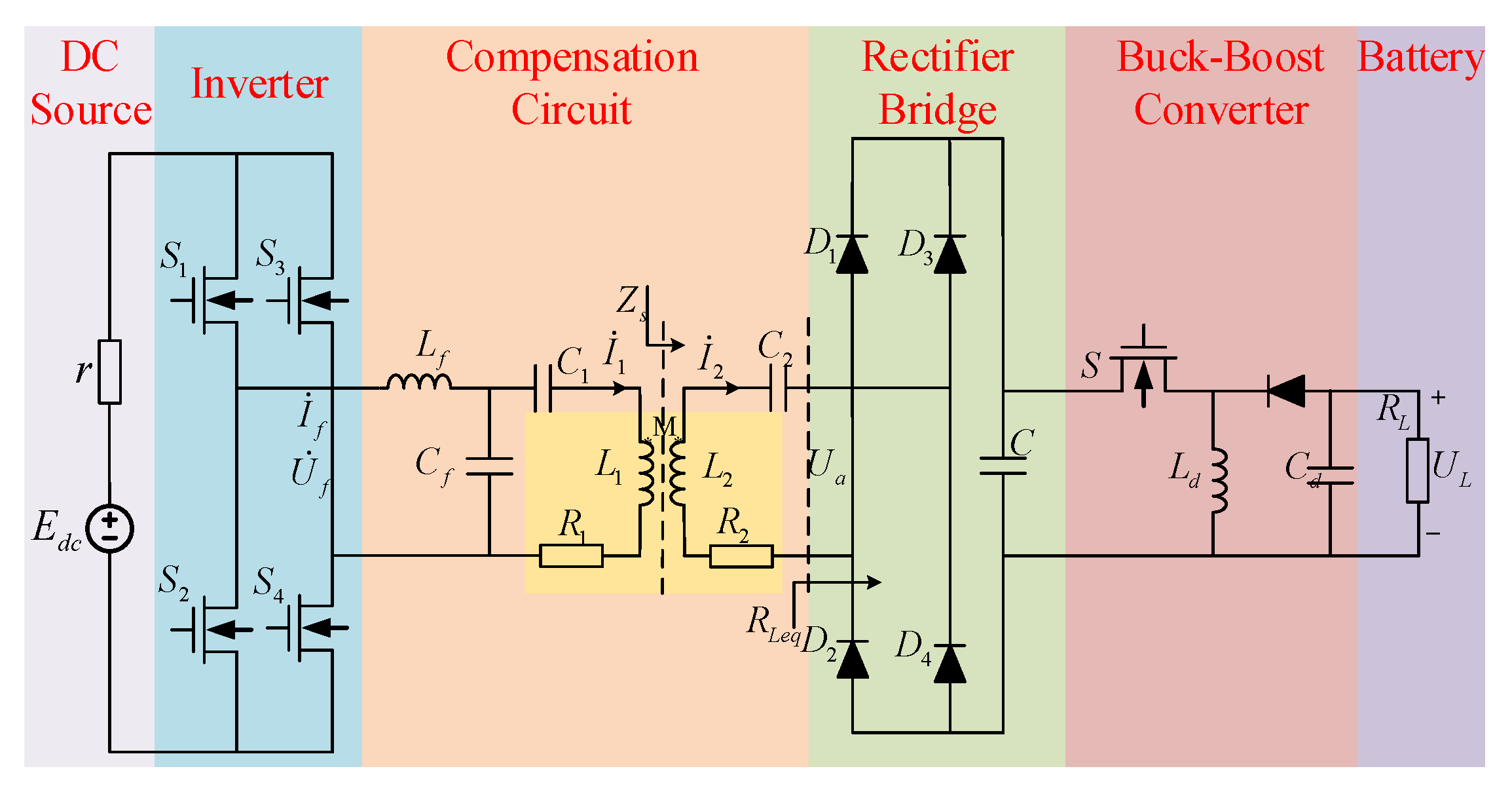
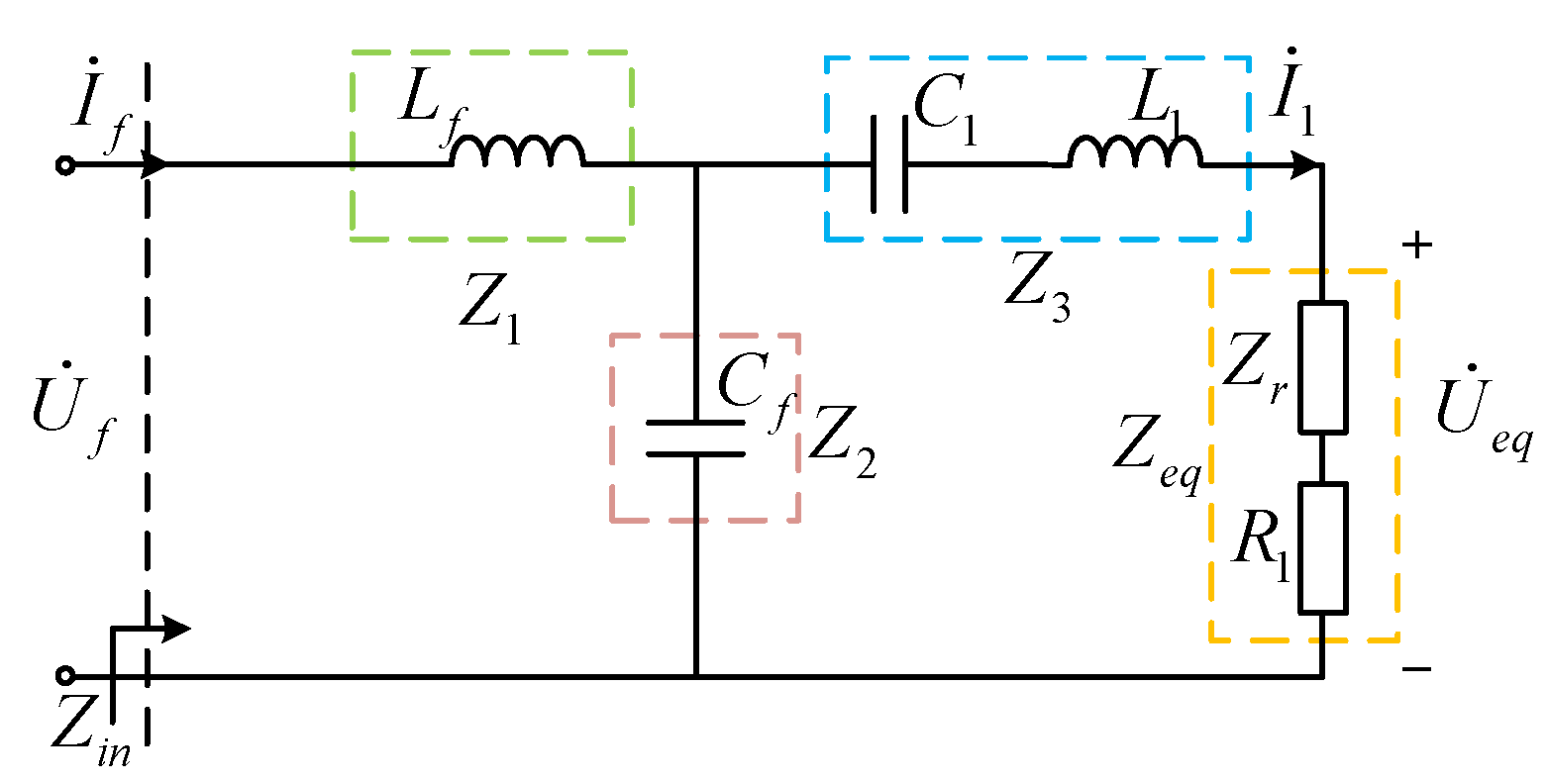
3.2. Mathematical Modeling of LCC-S System
4. Load and Mutual Inductance Identification Method Based on Improved PSO Algorithm
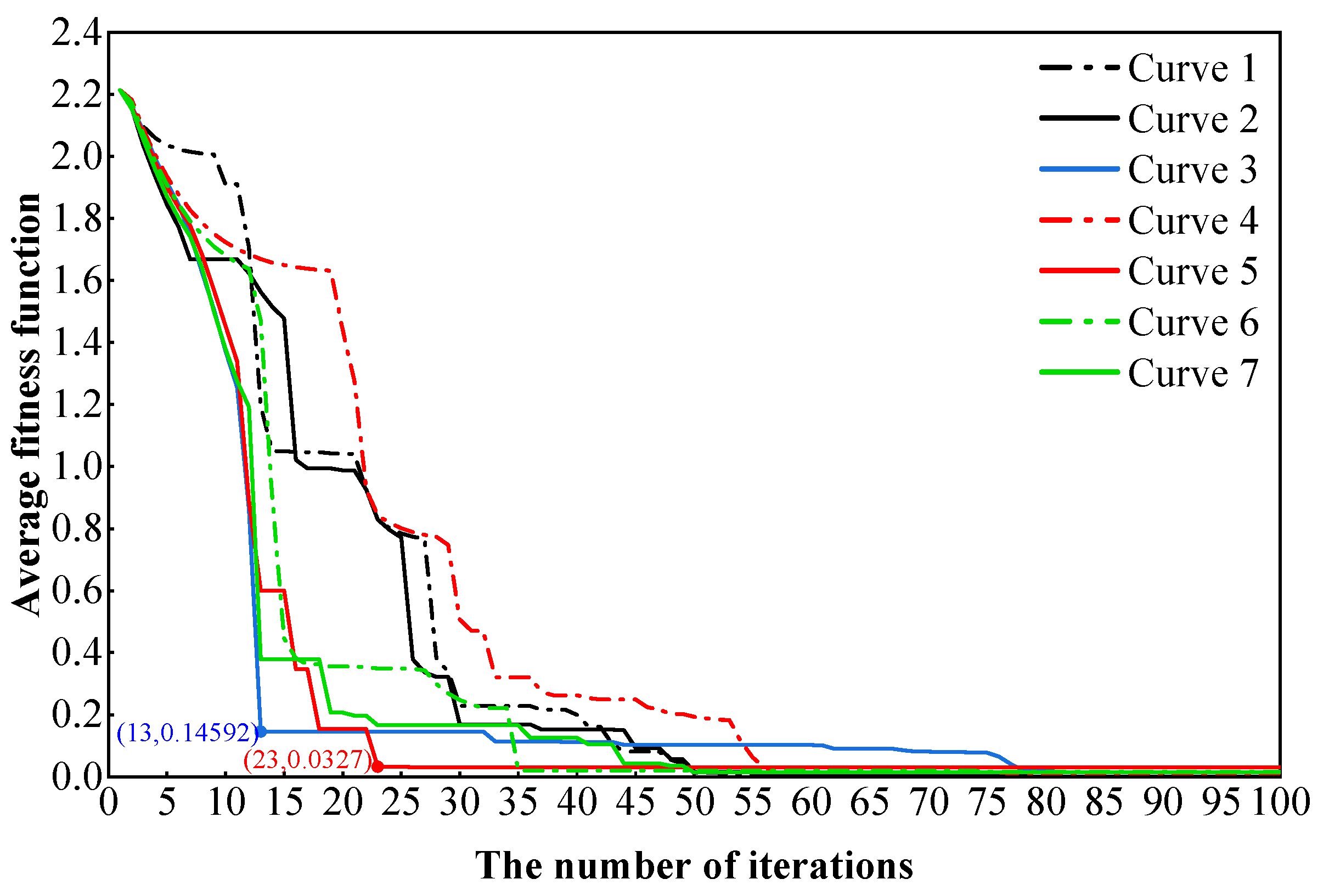
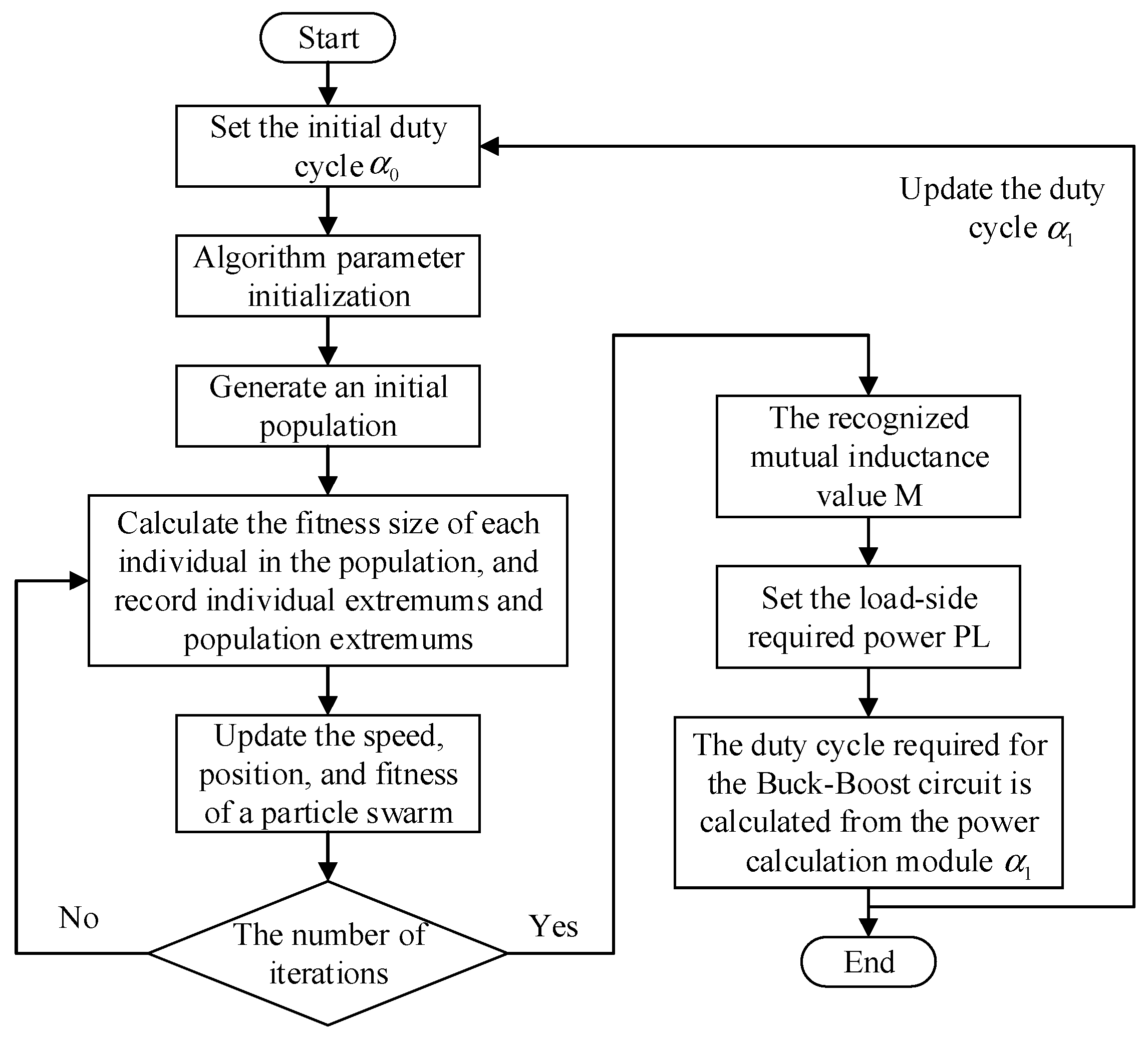
4.1. Improved Particle Swarm Algorithm
4.2. Power Stabilization Control Strategy
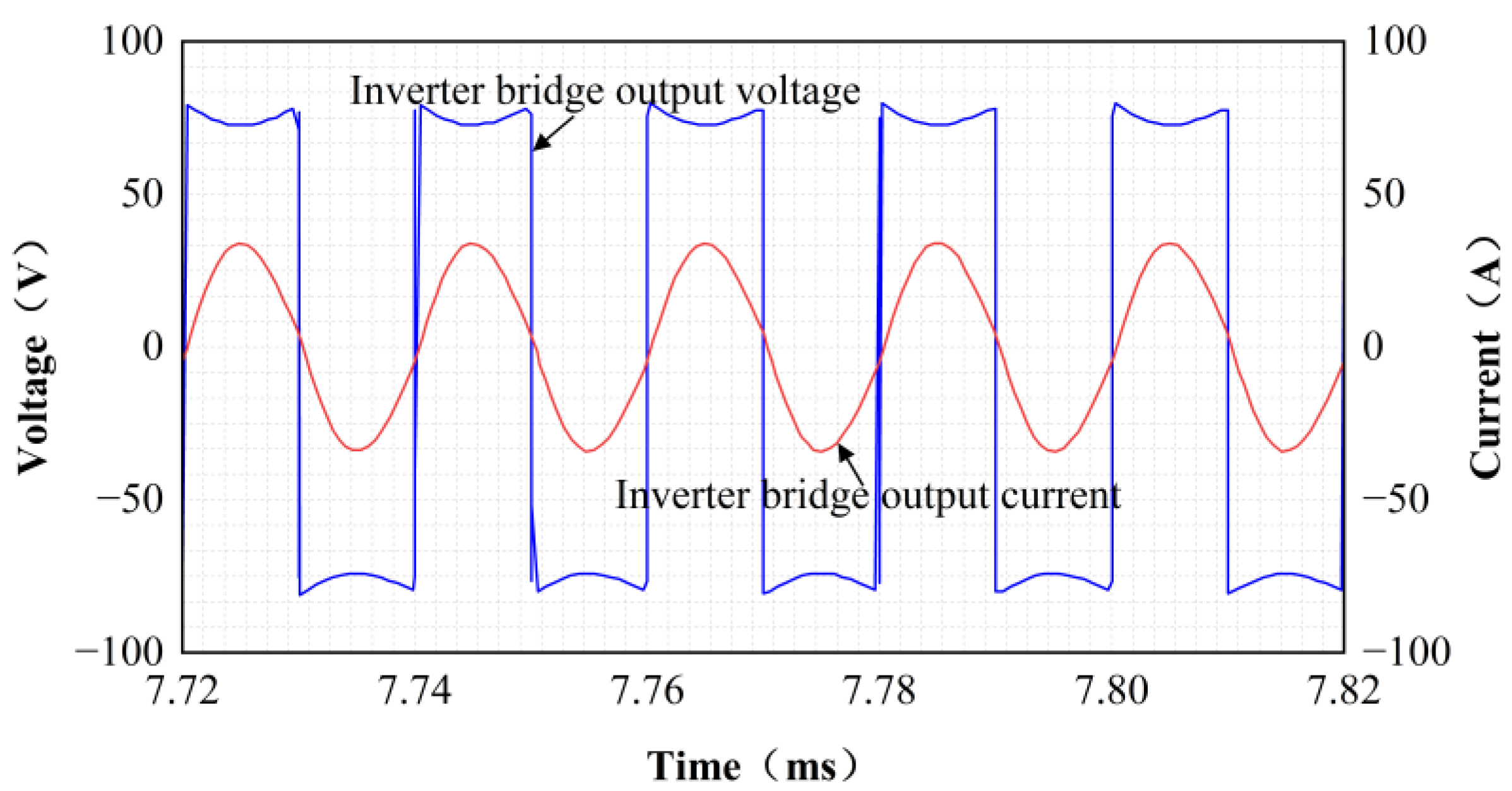
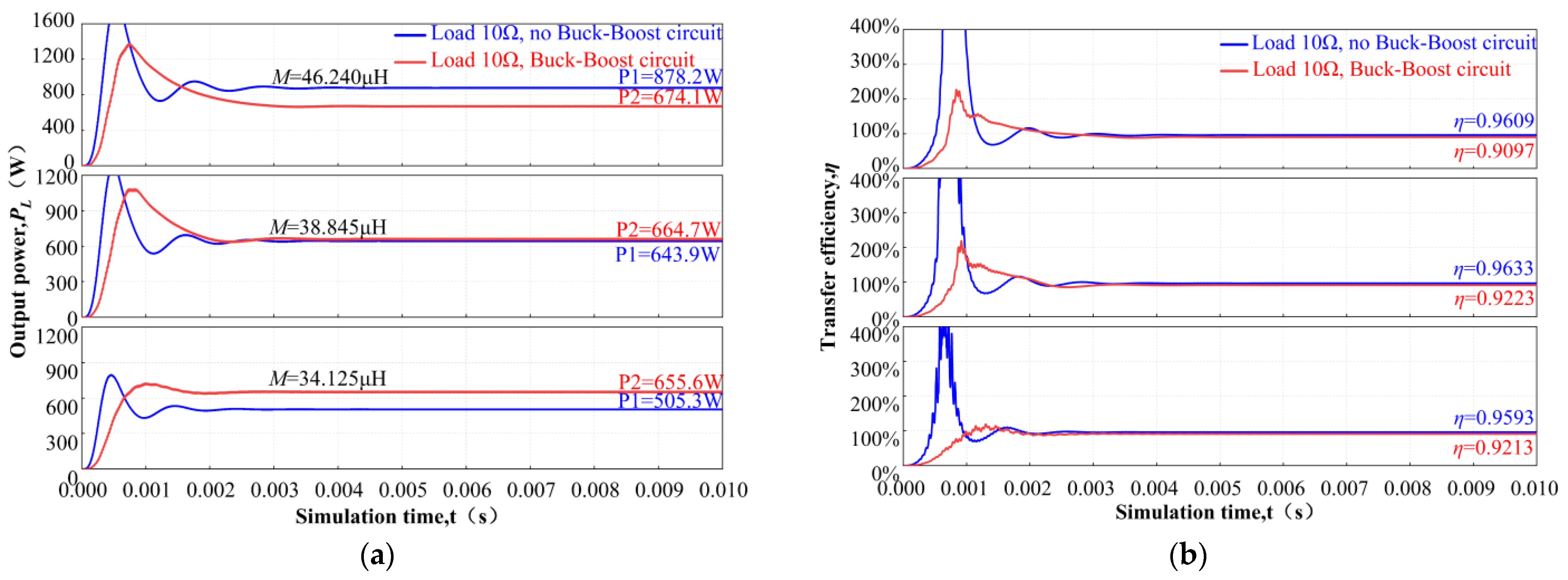
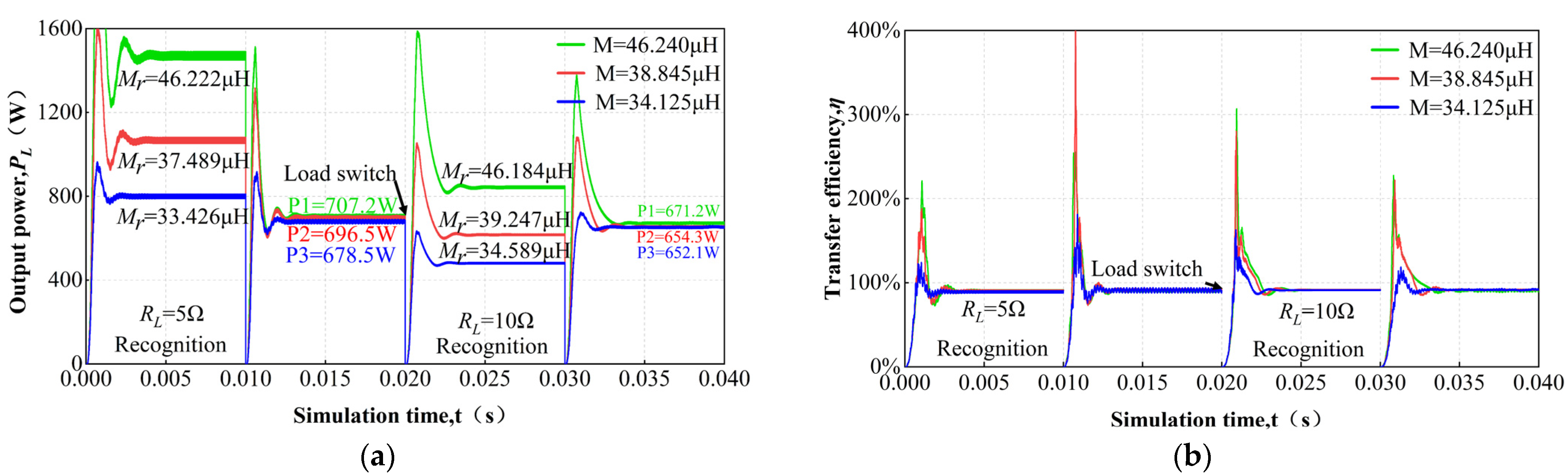
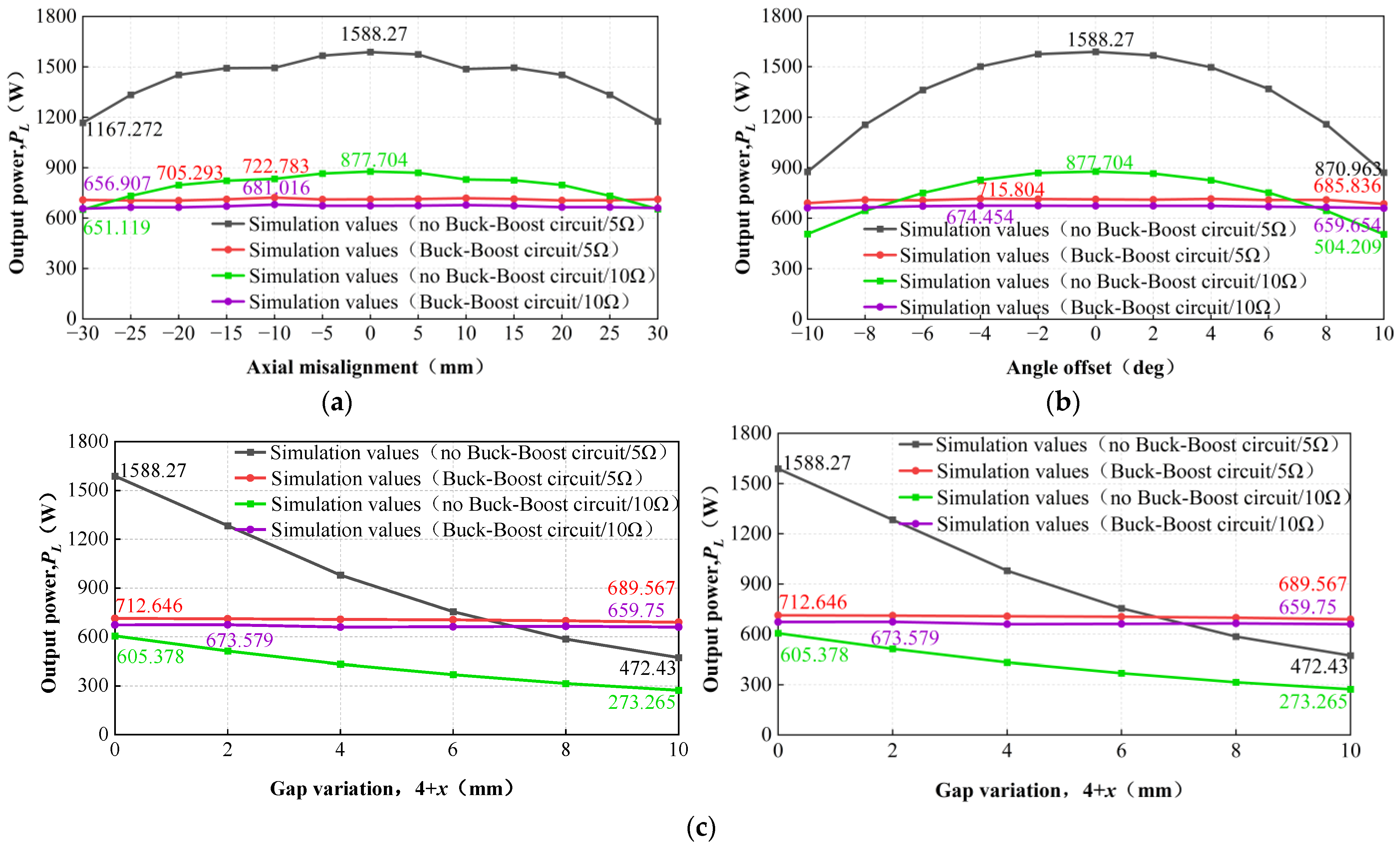
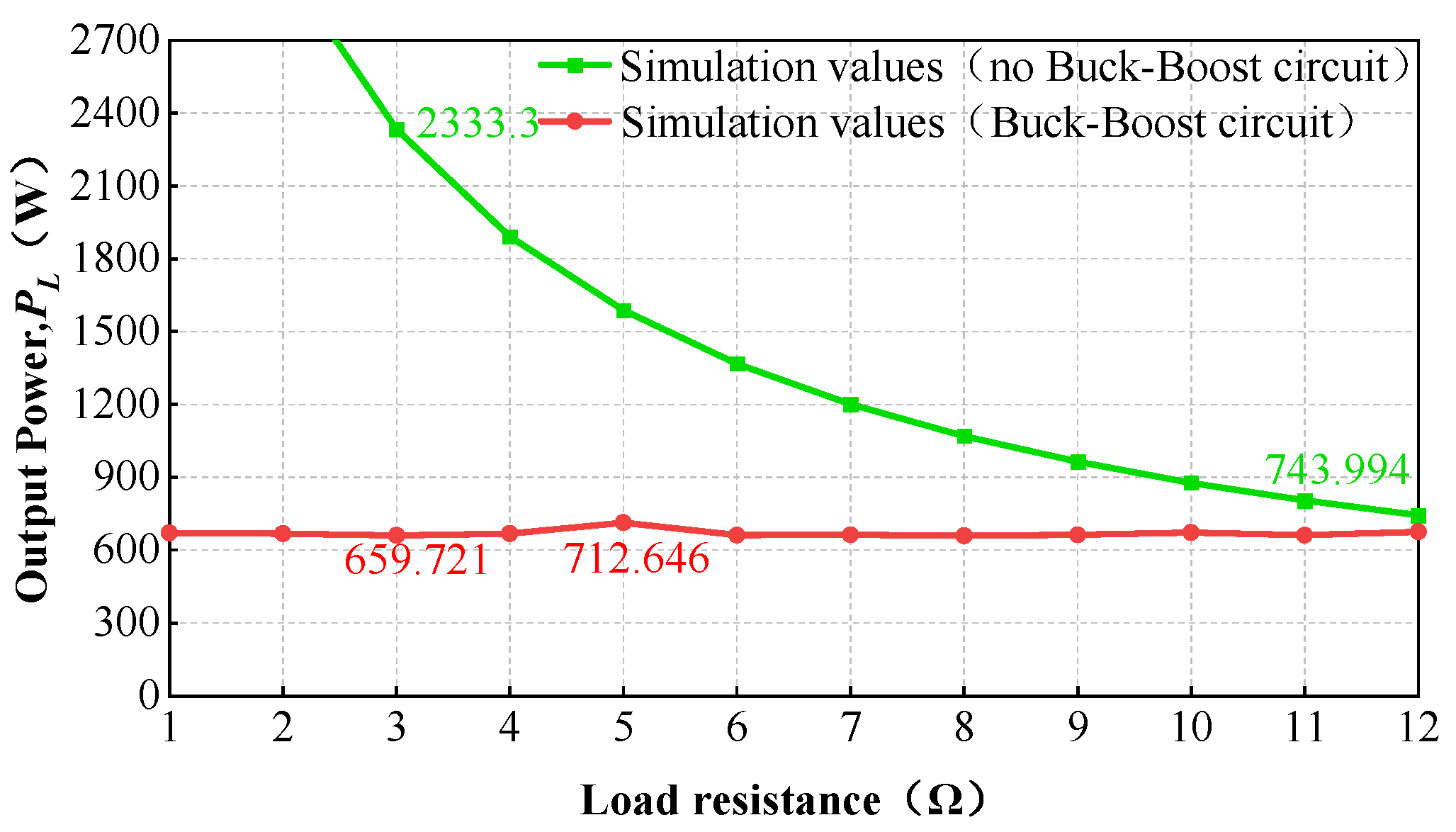
5. Simulation Analysis and Verification
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kadem, K.; Bensetti, M.; Bihan, Y.L. Optimal Coupler Topology for Dynamic Wireless Power Transfer for Electric Vehicle. Energies 2021, 14, 3983. [Google Scholar] [CrossRef]
- Matsuda, T.; Maki, T.; Masuda, K. Resident autonomous underwater vehicle: Underwater system for prolonged and continuous monitoring based at a seafloor station. Robot. Auton. Syst. 2019, 120, 103231. [Google Scholar] [CrossRef]
- Manikandan, J.; Akash, S.; Vishwanath, A.; Nandakumar, R.; Agrawal, V.K.; Manu, K. Design and development of contactless battery charger for underwater vehicles. Michael Faraday IET Int. Summit 2015, 2015, 362–367. [Google Scholar]
- Zhou, J.; Li, D.J.; Chen, Y. Frequency selection of an inductive contactless power transmission system for ocean observing. Ocean. Eng. 2013, 60, 175–185. [Google Scholar] [CrossRef]
- Lee, J.Y.; Han, B.M. A Bidirectional Wireless Power Transfer EV Charger Using Self-Resonant PWM. IEEE Trans. Power Electron. 2015, 30, 1784–1787. [Google Scholar] [CrossRef]
- Wang, T.L.; Zhao, Q.C.; Yang, C.J. Visual navigation and docking for a planar type AUV docking and charging system. Ocean. Eng. 2021, 224, 108744. [Google Scholar] [CrossRef]
- Sun, P.; Wu, X.S.; Cai, J.; Zhang, X.C.; Qiao, K.; Heng, S.H.M. Analysis of special technical problems of wireless charging at UUV docking stations and a new underwater electromagnetic coupler. Energy Rep. 2022, 8, 719–728. [Google Scholar] [CrossRef]
- Cai, C.; Wu, S.; Zhang, Z.; Jiang, L.; Yang, S. Development of a Fit-to-Surface and Lightweight Magnetic Coupler for Autonomous Underwater Vehicle Wireless Charging Systems. IEEE Trans. Power Electron. 2021, 36, 9927–9940. [Google Scholar] [CrossRef]
- Feezor, M.D.; Yates Sorrell, F.; Blankinship, P.R. An interface system for autonomous undersea vehicles. IEEE J. Ocean. Eng. 2001, 26, 522–525. [Google Scholar] [CrossRef]
- Kojiya, T.; Sato, F.; Matsuki, H.; Sato, T. Automatic power supply system to underwater vehicles utilizing non-contacting technology. IEEE Techno-Ocean. 2004, 4, 2341–2345. [Google Scholar]
- Zhang, Z.; Krein, P.T.; Ma, H.; Tang, Y.; Zhou, J.; Xu, D. An Inductive Power Transfer System Design with Large Misalignment Tolerance for EV Charging. In Proceedings of the 2018 IEEE 27th International Symposium on Industrial Electronics (ISIE), Cairns, Australia, 12–15 June 2018; pp. 1011–1016. [Google Scholar]
- Kan, T.; Mai, R.; Mercier, P.P.; Mi, C.C. Design and Analysis of a Three-Phase Wireless Charging System for Lightweight Autonomous Underwater Vehicles. IEEE Trans. Power Electron. 2018, 33, 6622–6632. [Google Scholar] [CrossRef]
- Lee, E.S.; Sohn, Y.H.; Choi, B.G.; Han, S.H.; Rim, C.T. A Modularized IPT With Magnetic Shielding for a Wide-Range Ubiquitous Wi-Power Zone. IEEE Trans. Power Electron. 2018, 33, 9669–9690. [Google Scholar] [CrossRef]
- Mohamed, A.A.S.; Berzoy, A.; Mohammad, O. Magnetic design considerations of bidirectional inductive wireless power transfer system for EV applications. In Proceedings of the 2016 IEEE Conference on Electromagnetic Field Computation (CEFC), Miami, FL, USA, 13–16 November 2016; p. 1. [Google Scholar]
- Mumtaz, F.; Yahaya, N.Z.; Meraj, S.T.; Singh, B.; Kannan, R.; Ibrahim, O. Review on non-isolated DC-DC converters and their control techniques for renewable energy applications. Ain Shams Eng. J. 2021, 12, 3747–3763. [Google Scholar] [CrossRef]
- Le, K.; Hou, X.C.; Song, H. Mutual inductance estimation of multiple input wireless power transfer for charging stationary vehicles in parking spaces. AIP Adv. 2020, 10, 95–120. [Google Scholar]
- Su, Y.G.; Chen, L.; Wu, X.Y.; Hu, A.P.; Tang, C.S.; Dai, X. Load and Mutual Inductance Identification from the Primary Side of Inductive Power Transfer System with Parallel-Tuned Secondary Power Pickup. IEEE Trans. Power Electron. 2018, 33, 9952–9962. [Google Scholar] [CrossRef]
- Zheng, P.; Lei, W.; Liu, F.; Li, R.; Lv, C. Primary Control Strategy of Magnetic Resonant Wireless Power Transfer Based on Steady-State Load Identification Method. In Proceedings of the 2018 IEEE International Power Electronics and Application Conference and Exposition (PEAC), Shenzhen, China, 4–7 November 2018; pp. 1–5. [Google Scholar]
- Sheng, X.; Shi, L. Mutual Inductance and Load Identification Method for Inductively Coupled Power Transfer System Based on Auxiliary Inverter. IEEE Trans. Veh. Technol. 2020, 69, 1533–1541. [Google Scholar] [CrossRef]
- Gong, W.L.; Xiao, J.; Wu, X.R.; Chen, S.N.; Wu, N. Research on parameter identification and phase-shifted control of magnetically coupled wireless power transfer system based on Inductor–Capacitor–Capacitor compensation. Energy Rep. 2022, 8, 949–957. [Google Scholar] [CrossRef]
- Chow, J.P.W.; Chung, H.H.; Cheng, C.S.; Wang, W. Use of Transmitter-Side Electrical Information to Estimate System Parameters of Wireless Inductive Links. IEEE Trans. Power Electron. 2017, 32, 7169–7186. [Google Scholar] [CrossRef]
- Che, B. Omnidirectional wireless power transfer system supporting mobile devices. In Proceedings of the 2015 IEEE International Magnetics Conference (INTERMAG), Beijing, China, 11–15 May 2015; p. 1. [Google Scholar]
- Cai, C.; Zhang, Y.; Wu, S.; Liu, J.; Zhang, Z.; Jiang, L. A Circumferential Coupled Dipole-Coil Magnetic Coupler for Autonomous Underwater Vehicles Wireless Charging Applications. IEEE Access 2020, 8, 65432–65442. [Google Scholar] [CrossRef]
- Li, S.; Li, W.; Deng, J.; Nguyen, T.D.; Mi, C.C. A Double-Sided LCC Compensation Network and Its Tuning Method for Wireless Power Transfer. IEEE Trans. Veh. Technol. 2015, 64, 2261–2273. [Google Scholar] [CrossRef]
- Li, Z.; Song, K.; Jiang, J.; Zhu, C. Constant Current Charging and Maximum Efficiency Tracking Control Scheme for Supercapacitor Wireless Charging. IEEE Trans. Power Electron. 2018, 33, 9088–9100. [Google Scholar] [CrossRef]
- Zhang, M.; Tan, L.; Li, J.; Huang, X. The Charging Control and Efficiency Optimization Strategy for WPT System Based on Secondary Side Controllable Rectifier. IEEE Access 2020, 8, 127993–128004. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. Int. Conf. Neural Netw. 1995, 4, 1942–1948. [Google Scholar]
- Shi, Y.; Eberhart, R. A modified particle swarm optimizer. In Proceedings of the 1998 IEEE International Conference on Evolutionary Computation Proceedings, Anchorage, AK, USA, 4–9 May 1998; pp. 69–73. [Google Scholar]
- Yang, X.; Wang, J.; Fei, Y.; Zhai, X.; Wang, C.; Zhang, M. Power stability control method of wireless power transfer system based on DC/DC circuit. Electr. Power Eng. Technol. 2019, 38, 173–178. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameters | Value |
|---|---|---|
| W1 | Primary winding line width | 50 mm |
| G1 | Primary coil and core gap | 2° |
| W2 | Primary core width | 48 mm |
| G2 | Primary coil 1, 2 gap | 1° |
| H1 | Primary core height | 24 mm |
| L1 | Primary core length | 114 mm |
| H2 | Secondary core height | 20 mm |
| L2 | Secondary core length | 71 mm |
| W3 | Secondary core width | 48 mm |
| H3 | Height of primary coil 1, 2, 3 | 0.3 mm |
| N1, N2 | Primary coil turns | 17 turns |
| N3 | Secondary coil turns | 19 turns |
| Symbol | Parameters | Value |
|---|---|---|
| Edc | DC Sources | 80 V |
| r | DC source internal resistance | 0.12 Ω |
| Lf | Primary series compensation inductance | 37.5 μH |
| C1 | Primary series compensation capacitor | 167 nF |
| C2 | Primary parallel compensation capacitor | 270 nF |
| R1 | Primary coil internal resistance | 0.13 Ω |
| L1 | Primary coil inductance | 98.14 μH |
| L2 | Secondary coil inductance | 60.919 μH |
| R2 | Secondary coil internal resistance | 0.13 Ω |
| C2 | Secondary series compensation capacitor | 166 nF |
| f | system operating frequency | 50 kHz |
| Parameters | Expressions/Meanings | Values (Unit) |
|---|---|---|
| L1 | Self-induction of the primary side | 99.702 μH |
| L2 | Self-induction of the secondary side | 61.815 μH |
| L10 | Self-induction by parallel method | 246.620 μH |
| L20 | Self-induction by reverse method | 75.676 μH |
| M | 42.736 μH | |
| k | 0.544 | |
| R1 | Equivalent resistance on the primary side | 0.773 Ω |
| R2 | Equivalent resistance on the secondary side | 0.465 Ω |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, T.; Zhang, X.; Zhu, Z.; Yu, H.; Li, H. An Adaptive Control Strategy for Underwater Wireless Charging System Output Power with an Arc-Shaped Magnetic Core Structure. J. Mar. Sci. Eng. 2023, 11, 294. https://doi.org/10.3390/jmse11020294
Xia T, Zhang X, Zhu Z, Yu H, Li H. An Adaptive Control Strategy for Underwater Wireless Charging System Output Power with an Arc-Shaped Magnetic Core Structure. Journal of Marine Science and Engineering. 2023; 11(2):294. https://doi.org/10.3390/jmse11020294
Chicago/Turabian StyleXia, Tao, Xiaoliang Zhang, Zhiying Zhu, Haitao Yu, and Hang Li. 2023. "An Adaptive Control Strategy for Underwater Wireless Charging System Output Power with an Arc-Shaped Magnetic Core Structure" Journal of Marine Science and Engineering 11, no. 2: 294. https://doi.org/10.3390/jmse11020294
APA StyleXia, T., Zhang, X., Zhu, Z., Yu, H., & Li, H. (2023). An Adaptive Control Strategy for Underwater Wireless Charging System Output Power with an Arc-Shaped Magnetic Core Structure. Journal of Marine Science and Engineering, 11(2), 294. https://doi.org/10.3390/jmse11020294