
Sailboat Test Arena (STAr): A Remotely Accessible Platform for Robotic Sailboat Research
 ,
,
Abstract
:1. Introduction
2. Design of Sailboat Test Arena (STAr)
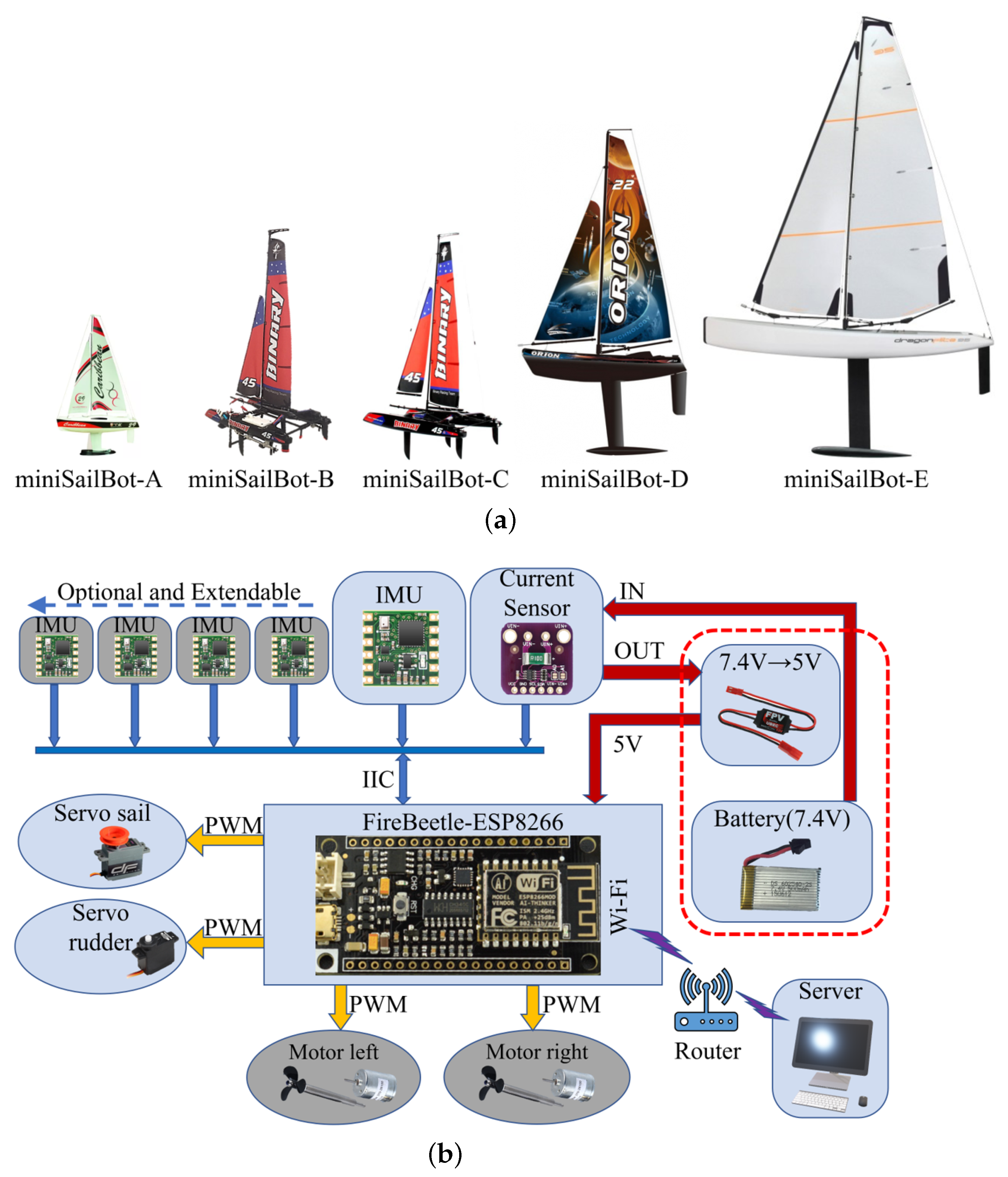
2.1. Miniature Sailing Robots (miniSailBots)
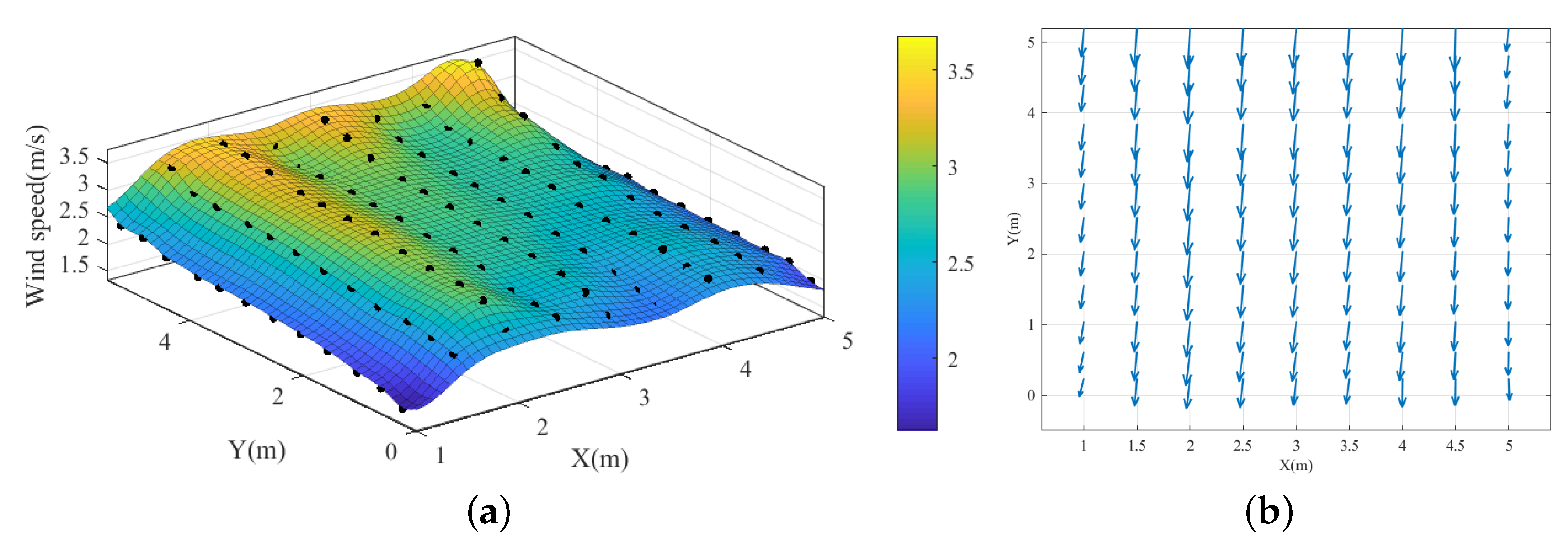
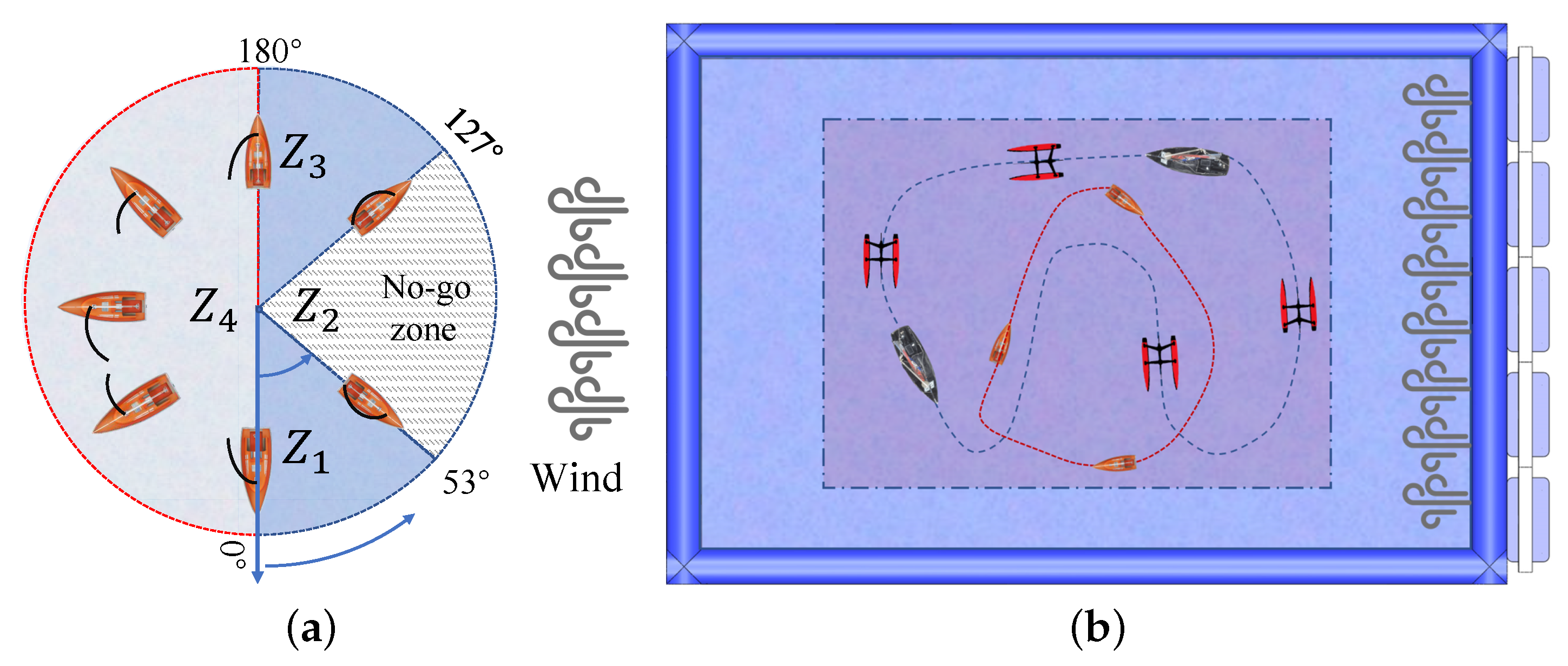
2.2. Wind Field
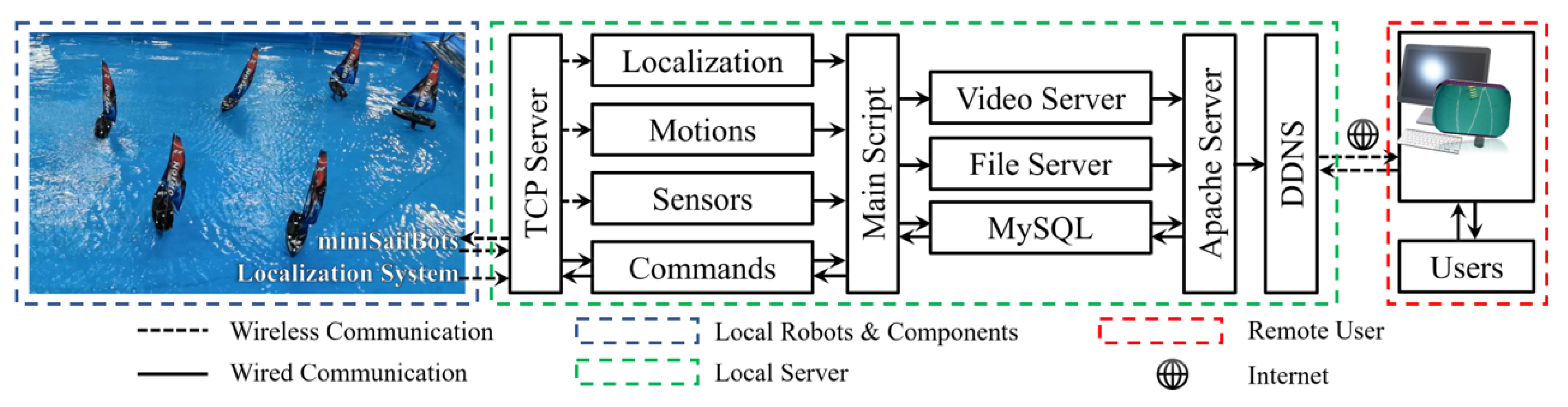
2.3. Internet Server and User Interface
3. Multi-Mode Human-Robot Interaction
3.1. Remote Teaching Mode
3.2. Remote Manual Control Mode
3.3. Remote Algorithm Deployment Mode
4. Remote Testing Experiments in STAr
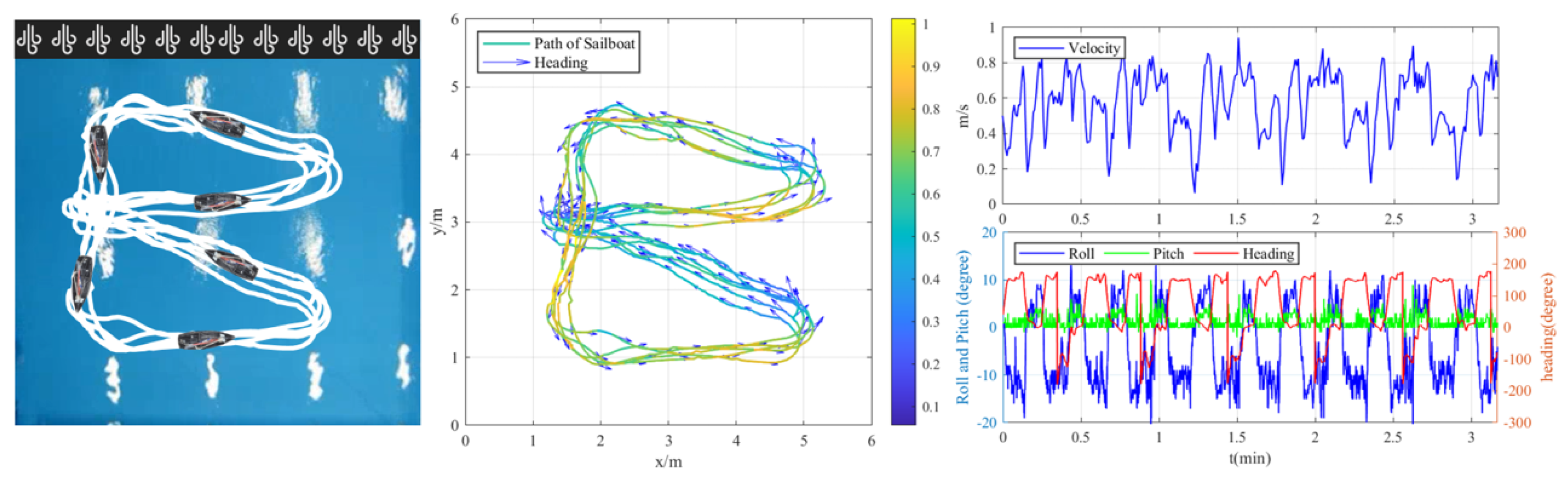
4.1. Remote Control by Practiced Researchers
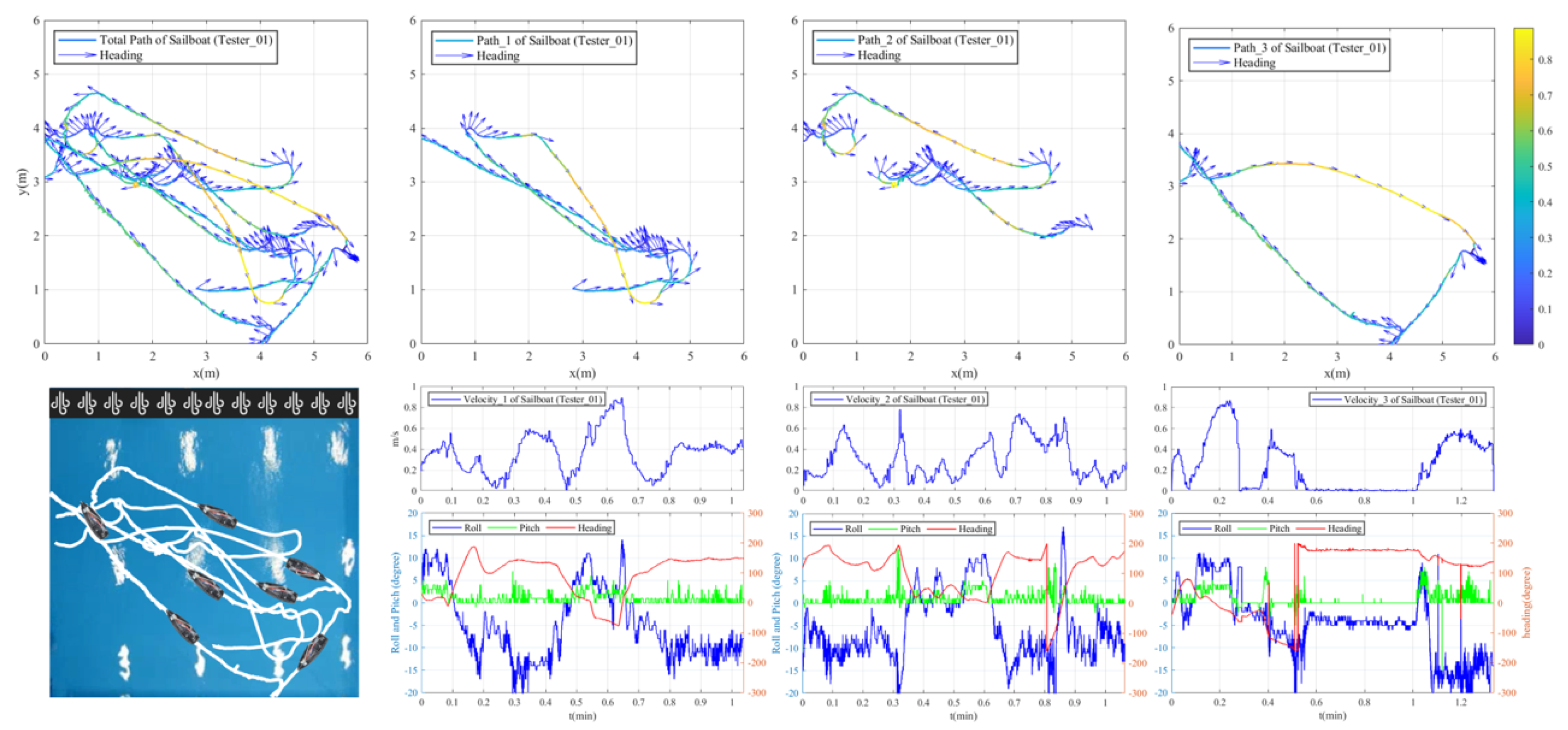
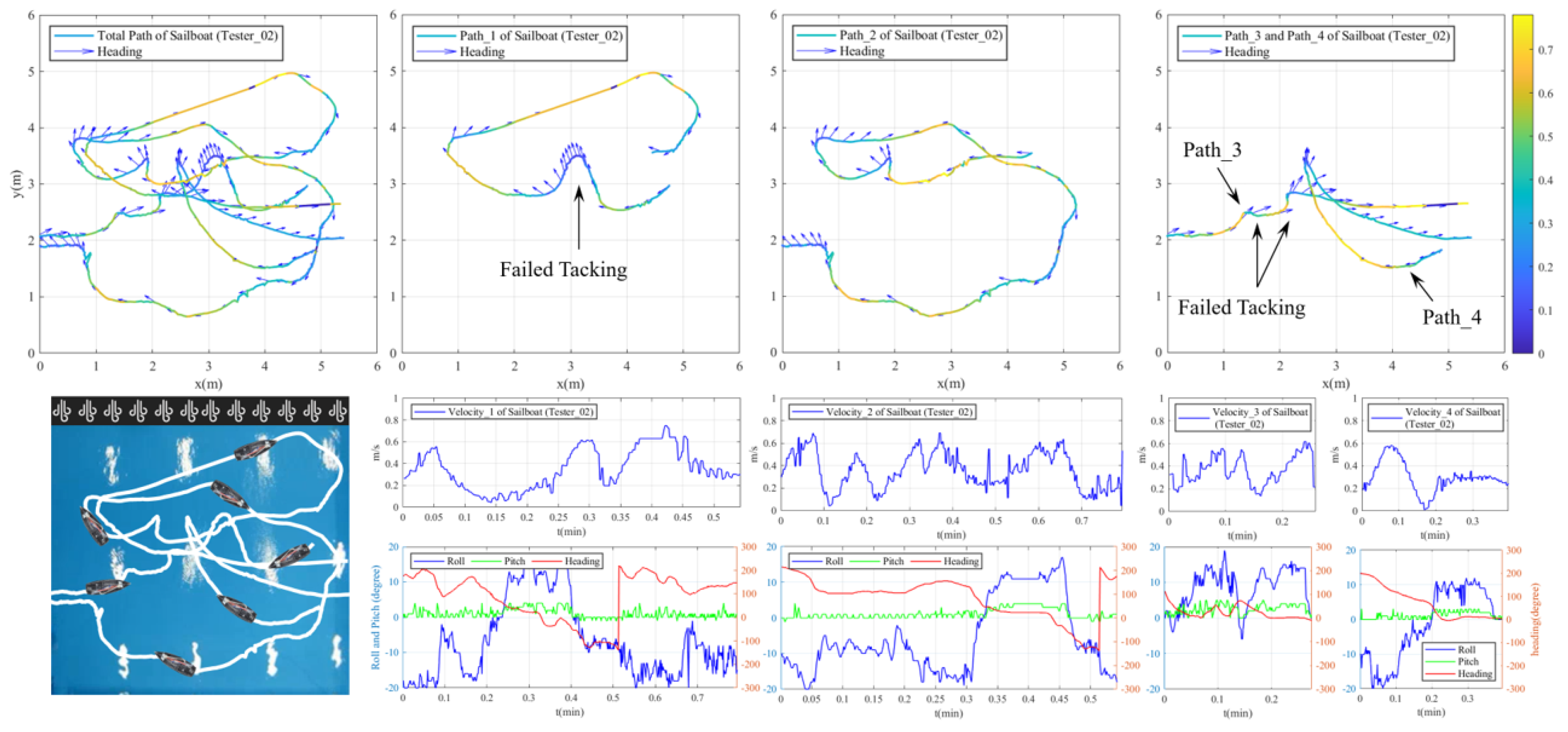
4.2. Remote Control by New Testers
4.3. A Remote Testing Example with Teaching Mode
4.4. Remote Testing with Deployed Algorithm (PID)
5. Local Testing Experiments in STAr
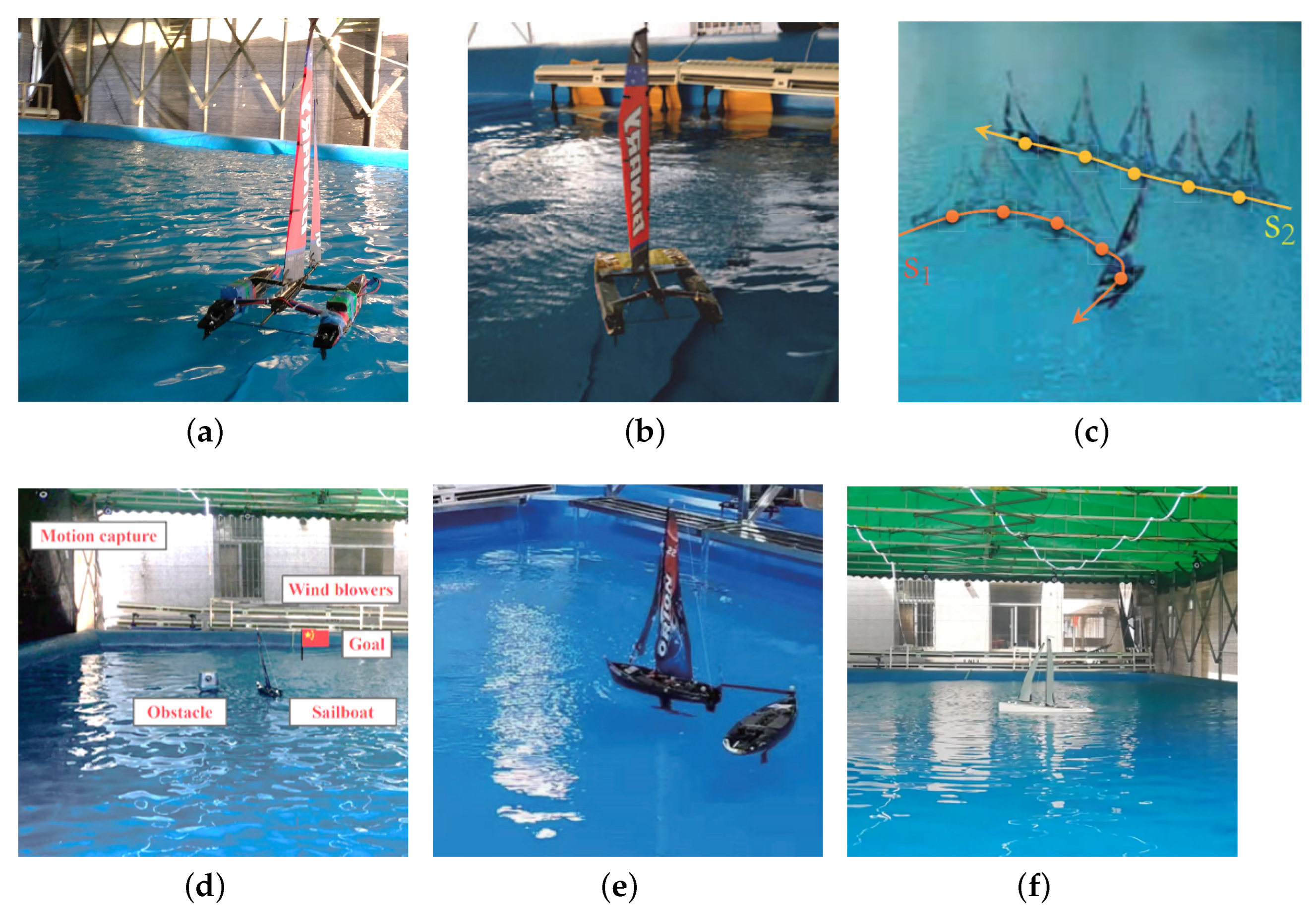
- The miniSailBot-A is a monohull sailboat, which is flexible and fast. From Table 1, miniSailBot-A runs fast. is bigger than miniSailBot-B. This is reasonable because the motor in miniSailBot-B is only used as an aid to tracking.
- Equipped with propellers, miniSailBot-B can run even faster. For example, the value of miniSailBot-B is greater than miniSailBot-C. The electromechanical auxiliary system can improve the performance of the catamaran (such as miniSailBot-C). The maximum speed is the largest of the three robots. is close to that of miniSailBot-A.
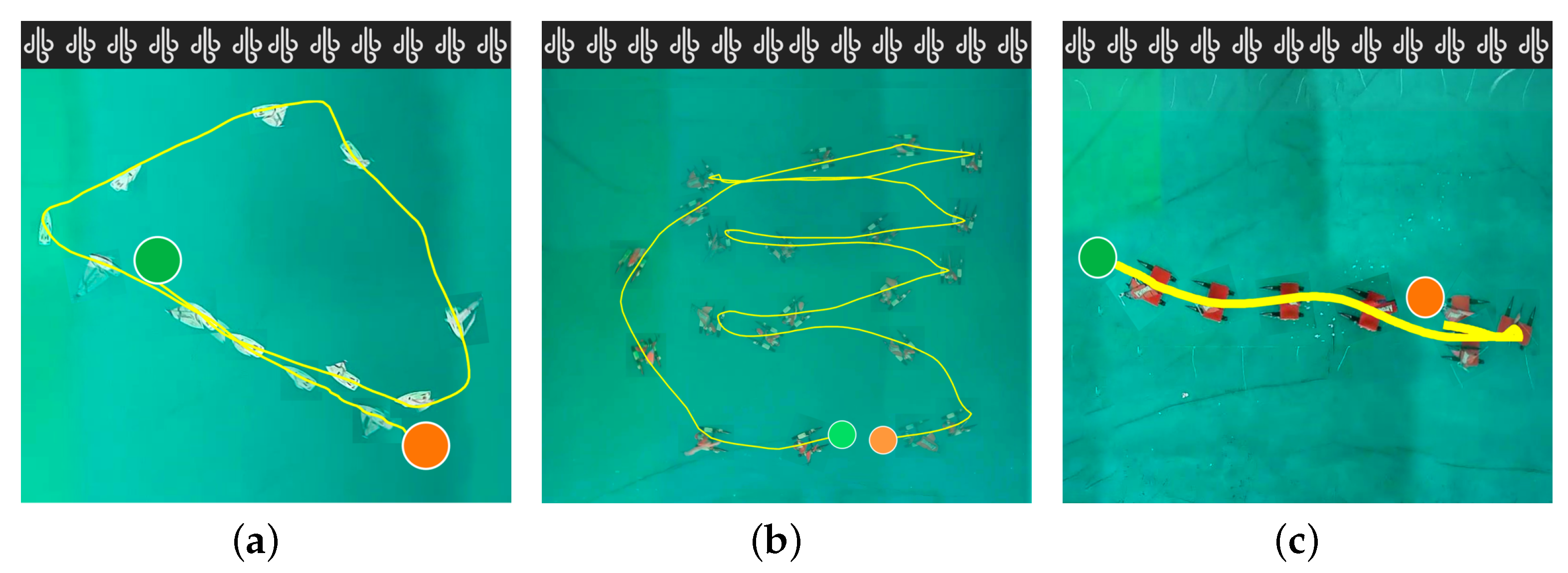
- From the and , miniSailBot-C has low mobility. Due to its large base, the robot can not turn (tacking) by novices in most cases. Thus, it is more challenging than other sailboats.
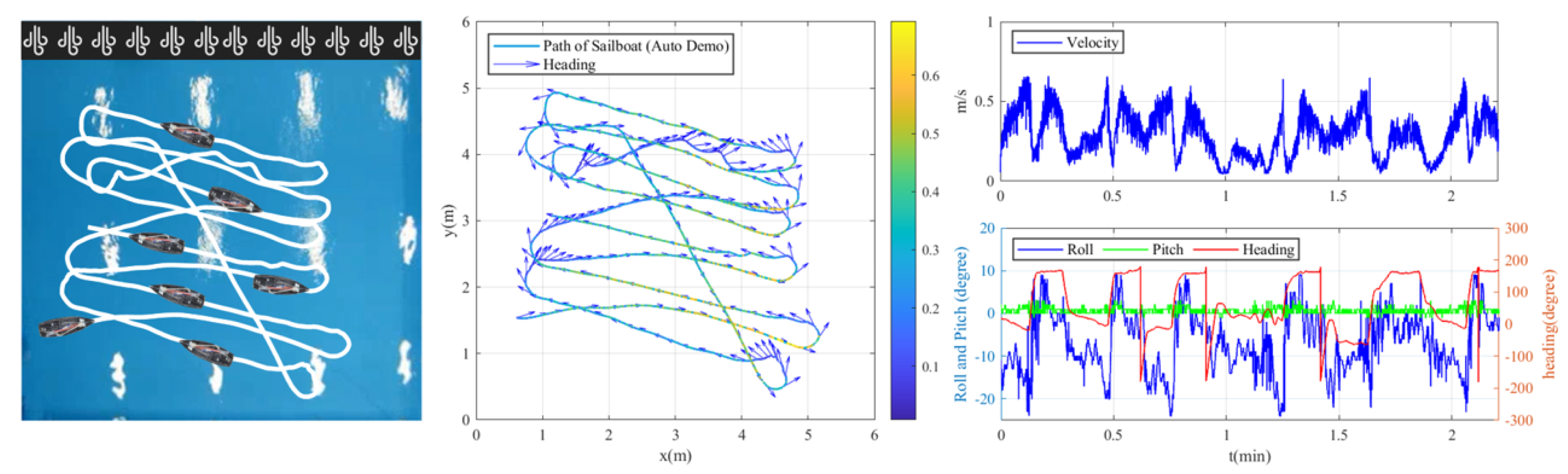
- From the and value, it can be analyzed that miniSailBot-A is an energy-saving robot and has better maneuverability in this scenario.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| STAr | Sailboat Test Arena |
| WRSC | The World Robotic Sailing Championship |
| PID | Proportional-Integral-Derivative |
| RL | Reinforcement Learning |
| miniSailBots | Miniature Sailing Robots |
| IMU | Inertial Measurement Unit |
| TCP | Transmission Control Protocol |
| DDNS | Dynamic Domain Name Server |
| API | Application Programming Interface |
| FPD | Force Polar Diagram |
| RRS | Racing Rule of Sailing |
References
- Sun, Q.; Qi, W.; Liu, H.; Ji, X.; Qian, H. Toward Long-Term Sailing Robots: State of the Art From Energy Perspectives. Front. Robot. AI 2022, 8, 416. [Google Scholar] [CrossRef] [PubMed]
- The Microtransat Challenge. Available online: https://www.microtransat.org/ (accessed on 29 January 2023).
- World Robotic Sailing Competition. Available online: https://www.roboticsailing.org/ (accessed on 29 January 2023).
- Tang, W.; Yueh, S.H.; Fore, A.G.; Vazquez-Cuervo, J.; Gentemann, C.; Hayashi, A.K.; Akins, A.; García-Reyes, M. Using Saildrones to Assess the SMAP Sea Surface Salinity Retrieval in the Coastal Regions. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 7042–7051. [Google Scholar] [CrossRef]
- Ricciardulli, L.; Foltz, G.R.; Manaster, A.; Meissner, T. Assessment of Saildrone Extreme Wind Measurements in Hurricane Sam Using MW Satellite Sensors. Remote Sens. 2022, 14, 2726. [Google Scholar] [CrossRef]
- Wullenweber, N.; Hole, L.R.; Ghaffari, P.; Graves, I.; Tholo, H.; Camus, L. SailBuoy Ocean Currents: Low-Cost Upper-Layer Ocean Current Measurements. Sensors 2022, 22, 5553. [Google Scholar] [CrossRef]
- Ortigosa, I.; Bardaji, R.; Carbonell, A.; Carrasco, O.; Castells-Sanabra, M.; Figuerola, R.; Hoareau, N.; Mateu, J.; Piera, J.; Puigdefabregas, J.; et al. Barcelona Coastal Monitoring with the “Patí a Vela”, a Traditional Sailboat Turned into an Oceanographic Platform. J. Mar. Sci. Eng. 2022, 10, 591. [Google Scholar] [CrossRef]
- Silva Junior, A.G.d.; Lima Sa, S.T.d.; Santos, D.H.d.; Negreiros, Á.P.F.d.; Souza Silva, J.M.V.B.d.; Álvarez Jácobo, J.E.; Garcia Gonçalves, L.M. Towards a Real-Time Embedded System for Water Monitoring Installed in a Robotic Sailboat. Sensors 2016, 16, 1226. [Google Scholar] [CrossRef]
- Sun, Q.; Qi, W.; Liu, H.; Sun, Z.; Lam, T.L.; Qian, H. Oceanvoy: A hybrid energy planning system for autonomous sailboat. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 2481–2487. [Google Scholar]
- Sun, Q.; Qi, W.; Ji, X.; Qian, H.A. V-stability Based Control for Energy-Saving towards Long Range Sailing. IEEE Robot. Autom. Lett. 2021, 8, 328–335. [Google Scholar] [CrossRef]
- Fossen, T.I. Marine Control Systems: Guidance, Navigation and Control of Ships, Rigs and Underwater Vehicles; Marine Cybernetics: Trondheim, Norway, 2002. [Google Scholar]
- Petres, C.; Romero-Ramirez, M.A.; Plumet, F.; Alessandrini, B. Modeling and reactive navigation of an autonomous sailboat. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 3571–3576. [Google Scholar]
- Qi, W.; Sun, Q.; Liu, C.; Ji, X.; Cao, Z.; Liang, Y.; Qian, H. Collision Risk Assessment and Obstacle Avoidance Control for Autonomous Sailing Robots. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 2511–2517. [Google Scholar]
- Qi, W.; Sun, Q.; Ji, X.; Liang, Y.; Cao, Z.; Qian, H. A Kelvin Wake Avoidance Scheme for Autonomous Sailing Robots Based on Orientation-Restricted Dubins Path. IEEE Robot. Autom. Lett. 2021, 7, 11585–11592. [Google Scholar] [CrossRef]
- Dong, Y.; Wu, N.; Qi, J.; Chen, X.; Hua, C. Predictive Course Control and Guidance of Autonomous Unmanned Sailboat Based on Efficient Sampled Gaussian Process. J. Mar. Sci. Eng. 2021, 9, 1420. [Google Scholar] [CrossRef]
- Silva Junior, A.G.d.; Santos, D.H.d.; Negreiros, A.P.F.d.; Silva, J.M.V.B.d.S.; Gonçalves, L.M.G. High-level path planning for an autonomous sailboat robot using Q-Learning. Sensors 2020, 20, 1550. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Raza, M.; Prokopova, H.; Huseynzade, S.; Azimi, S.; Lafond, S. Towards integrated digital-twins: An application framework for autonomous maritime surface vessel development. J. Mar. Sci. Eng. 2022, 10, 1469. [Google Scholar] [CrossRef]
- Fonseca, Í.A.; Gaspar, H.M. Fundamentals Of Digital Twins Applied To A Plastic Toy Boat And A Ship Scale Model. In Proceedings of the ECMS, Wildau, Germany, 9–12 June 2020; pp. 207–213. [Google Scholar]
- Gröber, S.; Vetter, M.; Eckert, B.; Jodl, H.J. Experimenting from a distance—remotely controlled laboratory (RCL). Eur. J. Phys. 2007, 28, S127. [Google Scholar] [CrossRef]
- Jiménez-González, A.; Martinez-de Dios, J.R.; Ollero, A. Testbeds for ubiquitous robotics: A survey. Robot. Auton. Syst. 2013, 61, 1487–1501. [Google Scholar] [CrossRef]
- Paull, L.; Tani, J.; Ahn, H.; Alonso-Mora, J.; Carlone, L.; Cap, M.; Chen, Y.F.; Choi, C.; Dusek, J.; Fang, Y. Duckietown: An open, inexpensive and flexible platform for autonomy education and research. In Proceedings of the IEEE International Conference on Robotics and Automation, Singapore, 29 May–3 June 2017. [Google Scholar]
- Pickem, D.; Glotfelter, P.; Wang, L.; Mote, M.; Ames, A.; Feron, E.; Egerstedt, M. The Robotarium: A remotely accessible swarm robotics research testbed. In Proceedings of the IEEE International Conference on Robotics and Automation, Singapore, 29 May–3 June 2017; pp. 1699–1706. [Google Scholar]
- Mandlekar, A.; Zhu, Y.; Garg, A.; Booher, J.; Spero, M.; Tung, A.; Gao, J.; Emmons, J.; Gupta, A.; Orbay, E.; et al. RoboTurk: A Crowdsourcing Platform for Robotic Skill Learning through Imitation. In Proceedings of the Conference on Robot Learning, Zürich, Switzerland, 29–31 October 2018. [Google Scholar]
- Tani, J.; Paull, L.; Zuber, M.T.; Rus, D.; How, J.; Leonard, J.; Censi, A. Duckietown: An innovative way to teach autonomy. In Proceedings of the International Conference EduRobotics 2016; Springer: Athens, Greece, 2016; pp. 104–121. [Google Scholar]
- Cheng, F.C.; Wang, Z.Y.; Chen, J.J. Integration of open source platform duckietown and gesture recognition as an interactive interface for the museum robotic guide. In Proceedings of the 2018 27th Wireless and Optical Communication Conference (WOCC), Hualien, Taiwan, 30 April–1 May 2018; pp. 1–5. [Google Scholar]
- Chuang, T.K.; Lin, N.C.; Chen, J.S.; Hung, C.H.; Huang, Y.W.; Teng, C.; Huang, H.; Yu, L.F.; Giarré, L.; Wang, H.C. Deep trail-following robotic guide dog in pedestrian environments for people who are blind and visually impaired-learning from virtual and real worlds. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 5849–5855. [Google Scholar]
- Tani, J.; Daniele, A.F.; Bernasconi, G.; Camus, A.; Petrov, A.; Courchesne, A.; Mehta, B.; Suri, R.; Zaluska, T.; Walter, M.R.; et al. Integrated benchmarking and design for reproducible and accessible evaluation of robotic agents. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 6229–6236. [Google Scholar]
- Wilson, S.; Glotfelter, P.; Mayya, S.; Notomista, G.; Emam, Y.; Cai, X.; Egerstedt, M. The robotarium: Automation of a remotely accessible, multi-robot testbed. IEEE Robot. Autom. Lett. 2021, 6, 2922–2929. [Google Scholar] [CrossRef]
- Tung, A.; Wong, J.; Mandlekar, A.; Martín-Martín, R.; Zhu, Y.; Fei-Fei, L.; Savarese, S. Learning multi-arm manipulation through collaborative teleoperation. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 9212–9219. [Google Scholar]
- Sun, Q.; Qiao, Z.; Strömbeck, C.; Qu, Y.; Liu, H.; Qian, H. Tacking control of an autonomous sailboat based on force polar diagram. In Proceedings of the 2018 13th World Congress on Intelligent Control and Automation (WCICA), Changsha, China, 4–8 July 2018; pp. 467–473. [Google Scholar]
- Zhang, Z.; Lyu, Y.; Raza, F.; Qian, H. Design and control of A hybrid sailboat for enhanced tacking maneuverv. In Proceedings of the 2018 13th World Congress on Intelligent Control and Automation (WCICA), Changsha, China, 4–8 July 2018; pp. 377–382. [Google Scholar]
- Qi, W.; Sun, Q.; Liu, H.; Sun, Z.; Lam, T.L.; Qian, H. Collision avoidance for autonomous sailboats based on rrs protocol. In Proceedings of the 2019 IEEE International Conference on Real-Time Computing and Robotics (RCAR), Irkutsk, Russia, 4–9 August 2019; pp. 13–18. [Google Scholar]
- Cheng, Z.; Qi, W.; Sun, Q.; Liu, H.; Ding, N.; Sun, Z.; Lam, T.L.; Qian, H. Obstacle Avoidance for Autonomous Sailboats via Reinforcement Learning with Coarse-to-fine Strategy. In Proceedings of the 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019; pp. 59–64. [Google Scholar]
- Feng, Z.; Qiu, J.; Liu, H.; Sun, Q.; Ding, N.; Sun, Z.; Lam, T.L.; Qian, H. An Adaptive Position Keeping Algorithm For Autonomous Sailboats. In Proceedings of the 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019; pp. 527–532. [Google Scholar]
- Zhang, Z.; Yao, Z.; Sun, Q.; Qian, H. Energy optimization of automatic hybrid sailboat. In Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; pp. 480–485. [Google Scholar]
- Ou, R.; Liang, C.; Ji, X.; Qian, H. Design and Energy Consumption Optimization of an Automatic Hybrid Sailboat. In Proceedings of the 2021 IEEE International Conference on Real-Time Computing and Robotics (RCAR), Xining, China, 15–19 July 2021; pp. 1414–1418. [Google Scholar]
- Yu, X.; Qi, W.; Sun, Q.; Liu, H.; Sun, Z.; Qian, H. A Low-Cost, Wide-Range and Multi-Functional Vision Backend of Sailboat Research Testbed. In Proceedings of the 2019 IEEE International Conference on Real-time Computing and Robotics (RCAR), Irkutsk, Russia, 4–9 August 2019; pp. 36–41. [Google Scholar]
- Chen, Y.; Zai, Y.; Lao, G.; Zhang, X.; Xue, K.; Qian, H. Vibration-Based Anemometer Design for Mini Autonomous Sailboat. In Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; pp. 556–561. [Google Scholar]
- Qiu, J.; Hou, J.; Liu, C.; Liu, H.; Lin, X.; Sun, Z.; Ding, N.; Lam, T.L.; Qian, H. A New Turbine-Sail Coupled Propulsive System for Autonomous Sailboats. In Proceedings of the 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019; pp. 1447–1452. [Google Scholar]
- Liang, C.; Ou, R.; Lin, B.; Ji, X.; Cheung, R.C.; Qian, H. Design of a battery carrying barge for enhancing autonomous sailboat’s endurance capacity. In Proceedings of the 2021 IEEE International Conference on Real-time Computing and Robotics (RCAR), Xining, China, 15–19 July 2021; pp. 1438–1443. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Dis | E | t | E/t | E/Dis | ||
|---|---|---|---|---|---|---|---|
| (m) | (m/s) | (m/s) | (J) | (s) | (W) | (J/m × ) | |
| miniSailBot-A | 35.75 | 0.31 | 0.59 | 531 | 120 | 4.43 | 0.15 |
| miniSailBot-B | 100.32 | 0.27 | 0.61 | 2727 | 360 | 7.58 | 0.27 |
| miniSailBot-C | 8.70 | 0.07 | 0.17 | 253 | 111 | 2.28 | 0.29 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Q.; Qi, W.; Liang, C.; Lin, B.; Maurelli, F.; Qian, H. Sailboat Test Arena (STAr): A Remotely Accessible Platform for Robotic Sailboat Research. J. Mar. Sci. Eng. 2023, 11, 297. https://doi.org/10.3390/jmse11020297
Sun Q, Qi W, Liang C, Lin B, Maurelli F, Qian H. Sailboat Test Arena (STAr): A Remotely Accessible Platform for Robotic Sailboat Research. Journal of Marine Science and Engineering. 2023; 11(2):297. https://doi.org/10.3390/jmse11020297
Chicago/Turabian StyleSun, Qinbo, Weimin Qi, Cheng Liang, Bairun Lin, Francesco Maurelli, and Huihuan Qian. 2023. "Sailboat Test Arena (STAr): A Remotely Accessible Platform for Robotic Sailboat Research" Journal of Marine Science and Engineering 11, no. 2: 297. https://doi.org/10.3390/jmse11020297