
Modeling and Adaptive Boundary Robust Control of Active Heave Compensation Systems


Abstract
1. Introduction
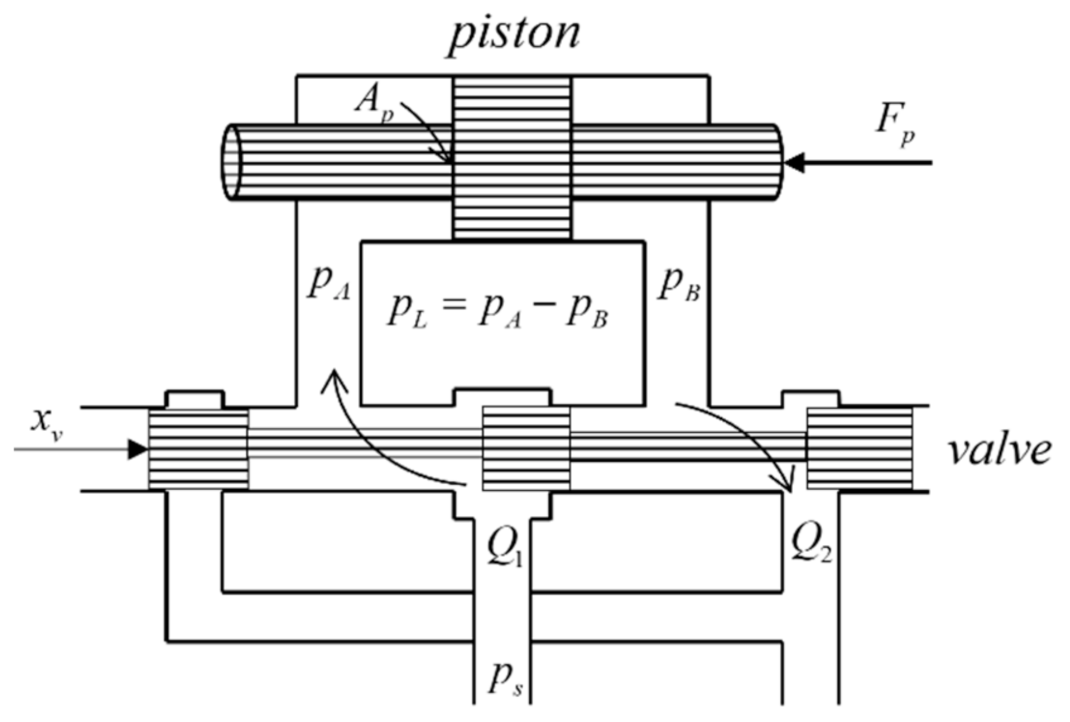
2. Dynamic Modeling
Vibration Control Equations
- Ignoring the effect of system piping pressure loss and dynamic properties;
- Neglecting servo valve flow leakage;
- The system supply pressure is stable and unchanging and oil tank pressure is 0.
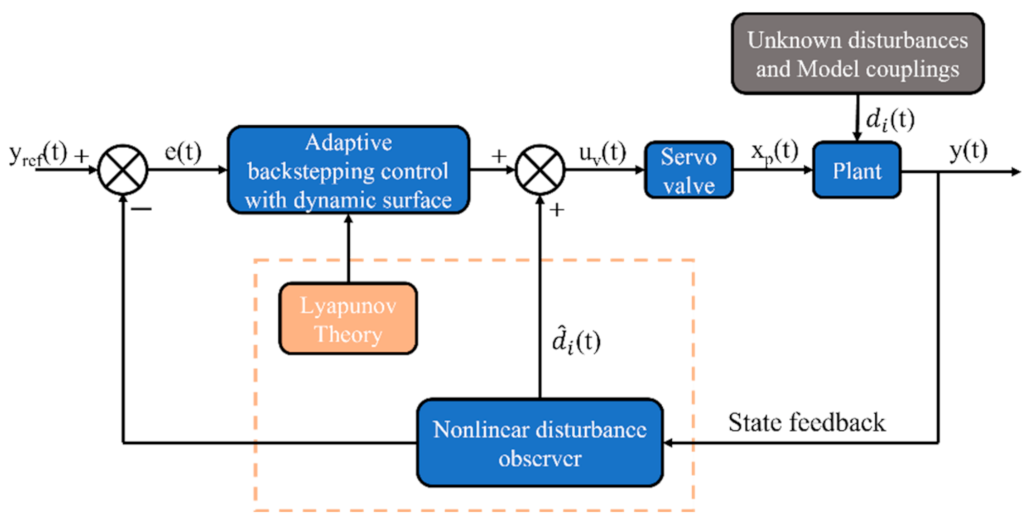
3. Control Design
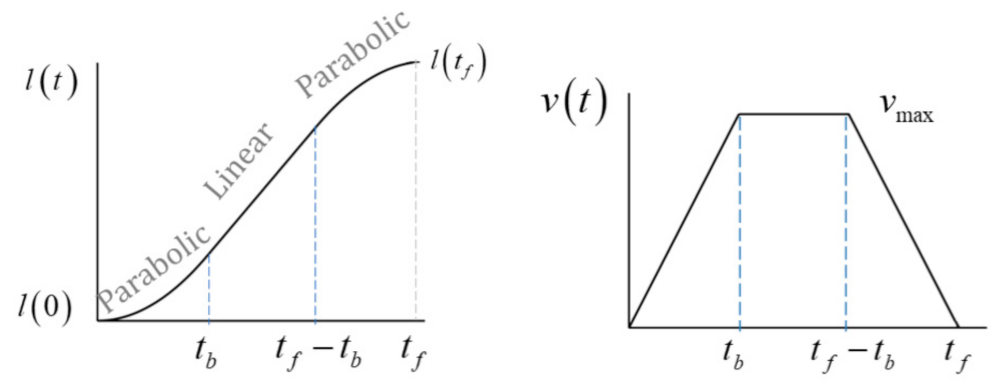
3.1. Trajectory Planning
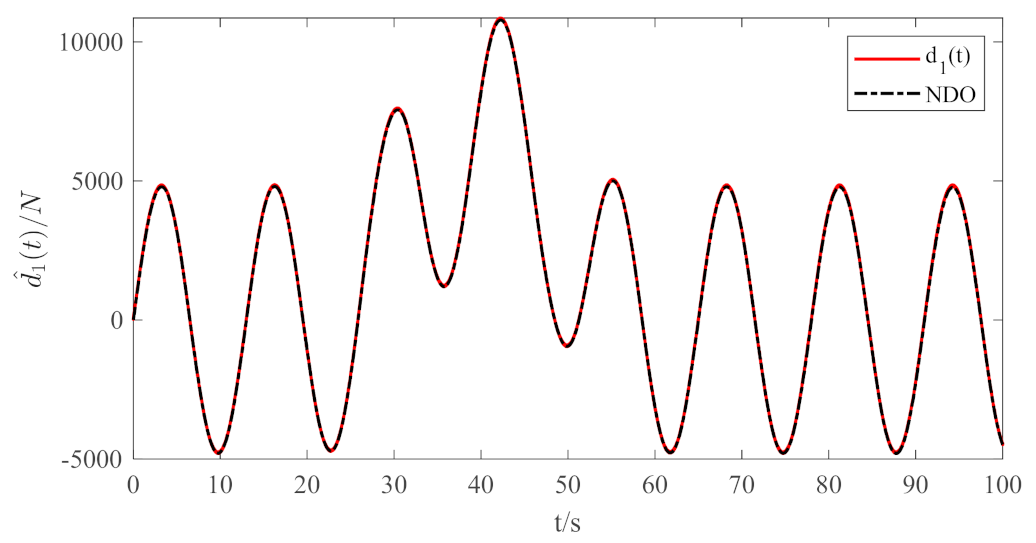
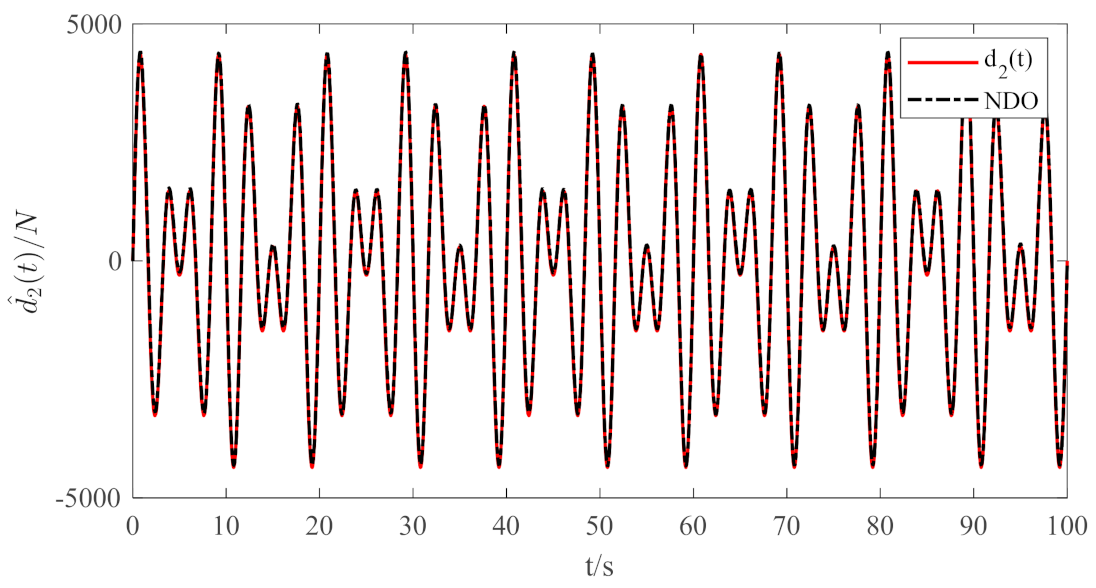
3.2. Nonlinear Disturbance Observer
3.3. Controller Design
3.4. Stability Analysis
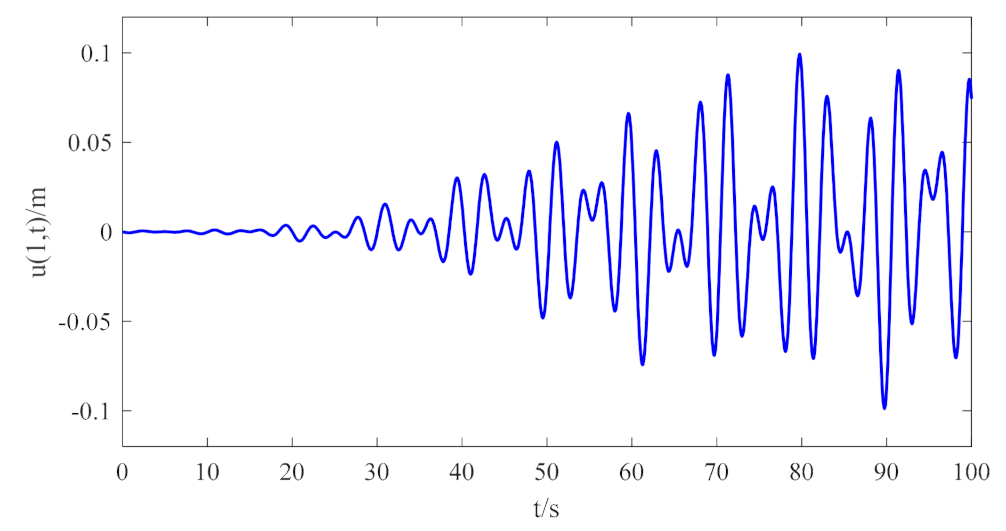
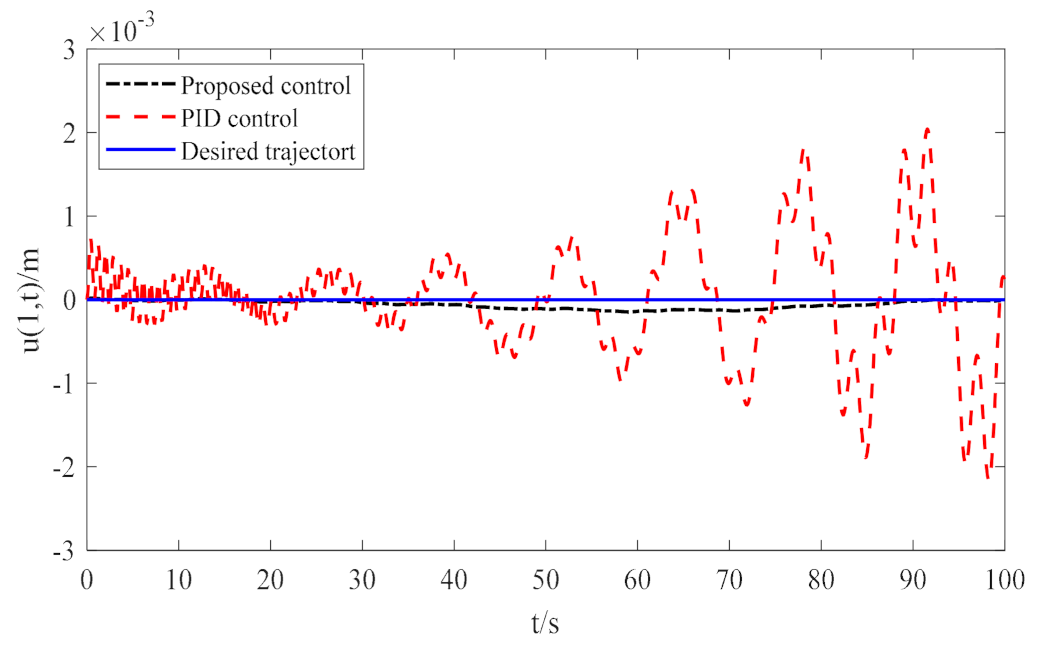
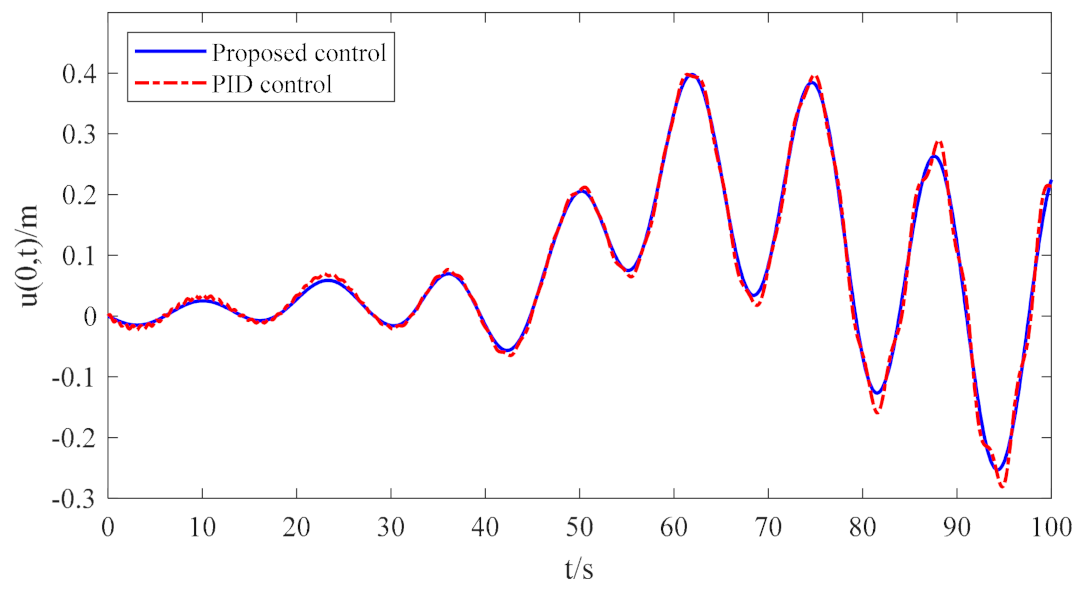
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition | Numerical |
|---|---|---|
| Quality of the robot | 2000 kg | |
| Vibration of cable at x | \ | |
| Partial differentiation with t | \ | |
| Partial differentiation with x | \ | |
| Time-varying length | 10~1000 m | |
| Linear density | 2 kg/m | |
| Viscous damping | 10 Ns/m2 | |
| Hydraulic oil bulk modulus of elasticity | 1.2 × 109 pa | |
| Supply pressure | 15 Mpa | |
| Damping coefficient | 7500 | |
| Hydraulic oil density | 900 kg/m3 | |
| Active area | 0.01767 m2 | |
| Valve spool displacement (Initial position) | 0 m | |
| Flow Gain | \ | |
| Flow-pressure coefficient | \ | |
| Flow coefficient | 0.7 | |
| Throttle window area gradient | 0.002 | |
| Total leakage coefficient | 2.3 × 10−10 m3/(s·pa) | |
| Quality of the piston | 500 kg | |
| Piston displacement | \ | |
| Total kinetic energy of the system | \ | |
| Total potential energy of the system | \ | |
| Total virtual work of the system | \ | |
| Modal function | \ | |
| Trial functions | \ | |
| Generalized coordinates | \ | |
| Axial tensile stiffness of the umbilical cable | 2 × 107 N | |
| Servo valve flow | \ | |
| External load force | \ | |
| Spool conversion factor | 1 | |
| Tracking target | 0 | |
| Virtual control variables | \ | |
| Tracking errors | \ | |
| Lyapunov functions | \ | |
| Unknown disturbances | \ | |
| Robust control term | \ | |
| Controller design parameters | 42 | |
| Controller design parameters | 20 | |
| Controller design parameters | 4 | |
| Controller design parameters | 2 | |
| Controller design parameters | 100 | |
| Filter factor | 0.01 | |
| A small positive constant | 0.21 | |
| Design parameters | 0.002 | |
| Disturbance observer gain | 80 | |
| The upper bound of the robust term | 0.01 | |
| The lower bound of the robust term | 0 |
References
- Wu, N.L.; Wang, X.Y.; Ge, T.; Wu, C.; Yang, R. Parametric identification and structure searching for underwater vehicle model using symbolic regression. J. Mar. Sci. Technol. 2017, 22, 51–60. [Google Scholar] [CrossRef]
- Azis, F.A.; Aras, M.S.M.; Rashid, M.Z.A.; Othman, M.N.; Abdullah, S.S. Problem identification for underwater remotely operated vehicle (ROV): A case study. Procedia Eng. 2012, 41, 554–560. [Google Scholar] [CrossRef]
- Jiang, C.M.; Wan, L.; Sun, Y.S. Design of motion control system of pipeline detection AUV. J. Cent. South Univ. 2017, 24, 637–646. [Google Scholar] [CrossRef]
- Petillot, Y.R.; Antonelli, G.; Casalino, G.; Ferreira, F. Underwater robots: From remotely operated vehicles to intervention-autonomous underwater vehicles. IEEE Robot. Autom. Mag. 2019, 26, 94–101. [Google Scholar] [CrossRef]
- Woodacre, J.K.; Bauer, R.J.; Irani, R.A. A review of vertical motion heave compensation systems. Ocean Eng. 2015, 104, 140–154. [Google Scholar] [CrossRef]
- Quan, W.; Liu, Y.; Zhang, Z.; Li, X.; Liu, C. Scale model test of a semi-active heave compensation system for deep-sea tethered ROVs. Ocean Eng. 2016, 126, 353–363. [Google Scholar] [CrossRef]
- Lubis, M.B.; Kimiaei, M.; Efthymiou, M. Alternative configurations to optimize tension in the umbilical of a work class ROV performing ultra-deep-water operation. Ocean Eng. 2021, 225, 108786. [Google Scholar] [CrossRef]
- Woodacre, J.K.; Bauer, R.J.; Irani, R. Hydraulic valve-based active-heave compensation using a model-predictive controller with non-linear valve compensations. Ocean Eng. 2018, 152, 47–56. [Google Scholar] [CrossRef]
- Ren, Z.; Skjetne, R.; Verma, A.S.; Jiang, Z.; Gao, Z.; Halse, K.H. Active heave compensation of floating wind turbine installation using a catamaran construction vessel. Mar. Struct. 2021, 75, 102868. [Google Scholar] [CrossRef]
- Liu, J.; Zhao, H.; Liu, Q.; He, Y.; Wang, G.; Wang, C. Dynamic behavior of a deepwater hard suspension riser under emergency evacuation conditions. Ocean Eng. 2018, 150, 138–151. [Google Scholar] [CrossRef]
- Lee, D.H.; Kim, T.W.; Ji, S.W.; Kim, Y.B. A study on load position control and vibration attenuation in crane operation using sub-actuator. Meas. Control. 2019, 52, 794–803. [Google Scholar] [CrossRef]
- Li, S.; Wei, J.; Guo, K.; Zhu, W.L. Nonlinear robust prediction control of hybrid active–passive heave compensator with extended disturbance observer. IEEE Trans. Ind. Electron. 2017, 64, 6684–6694. [Google Scholar] [CrossRef]
- Gu, P.; Walid, A.A.; Iskandarani, Y.; Karimi, H.R. Modeling, simulation and design optimization of a hoisting rig active heave compensation system. Int. J. Mach. Learn. Cybern. 2013, 4, 85–98. [Google Scholar] [CrossRef]
- Cao, Y.; Wen, C.; Song, Y. Prescribed performance control of strict-feedback systems under actuation saturation and output constraint via event-triggered approach. Int. J. Robust Nonlinear Control. 2019, 29, 6357–6373. [Google Scholar] [CrossRef]
- Qu, Z. Robust Control of Nonlinear Uncertain Systems; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1998. [Google Scholar]
- Xing, X.; Liu, J. Modeling and robust adaptive iterative learning control of a vehicle-based flexible manipulator with uncertainties. Int. J. Robust Nonlinear Control. 2019, 29, 2385–2405. [Google Scholar] [CrossRef]
- Islam, S.; Liu, X.P. Robust sliding mode control for robot manipulators. IEEE Trans. Ind. Electron. 2010, 58, 2444–2453. [Google Scholar] [CrossRef]
- Li, Z.; Ma, X.; Li, Y.; Meng, Q.; Li, J. ADRC-ESMPC active heave compensation control strategy for offshore cranes. Ships Offshore Struct. 2020, 15, 1098–1106. [Google Scholar] [CrossRef]
- Yu, H.; Chen, Y.; Shi, W.; Xiong, Y.; Wei, J. State constrained variable structure control for active heave compensators. IEEE Access 2019, 7, 54770–54779. [Google Scholar] [CrossRef]
- Kwon, S.; Chung, W.K. A discrete-time design and analysis of perturbation observer for motion control applications. IEEE Trans. Control. Syst. Technol. 2003, 11, 399–407. [Google Scholar] [CrossRef]
- Chen, W.H.; Yang, J.; Guo, L.; Li, S. Disturbance-observer-based control and related methods—An overview. IEEE Trans. Ind. Electron. 2015, 63, 1083–1095. [Google Scholar] [CrossRef]
- Li, S.; Yang, J.; Chen, W.H.; Chen, X. Generalized extended state observer based control for systems with mismatched uncertainties. IEEE Trans. Ind. Electron. 2011, 59, 4792–4802. [Google Scholar] [CrossRef]
- Sun, N.; Yang, T.; Chen, H.; Fang, Y. Dynamic feedback antiswing control of shipboard cranes without velocity measurement: Theory and hardware experiments. IEEE Trans. Ind. Inform. 2018, 15, 2879–2891. [Google Scholar] [CrossRef]
- Swaroop, D.; Hedrick, J.K.; Yip, P.P.; Gerdes, J.C. Dynamic surface control for a class of nonlinear systems. IEEE Trans. Autom. Control. 2000, 45, 1893–1899. [Google Scholar] [CrossRef]
- Kim, S.K.; Ahn, C.K.; Shi, P. Performance recovery tracking-controller for quadcopters via invariant dynamic surface approach. IEEE Trans. Ind. Inform. 2019, 15, 5235–5243. [Google Scholar] [CrossRef]
- Shi, M.; Guo, S.; Jiang, L.; Huang, Z. Active-passive combined control system in crane type for heave compensation. IEEE Access 2019, 7, 159960–159970. [Google Scholar] [CrossRef]
- Hou, M.; Duan, G.; Guo, M. New versions of Barbalat’s lemma with applications. J. Control. Theory Appl. 2010, 8, 545–547. [Google Scholar] [CrossRef]










| Symbol | Definition | Symbol | Definition |
|---|---|---|---|
| Quality of the robot | Quality of the piston | ||
| Vibration of cable at x | Piston displacement | ||
| Partial differentiation with t | Hydraulic oil density | ||
| Partial differentiation with x | Active area | ||
| Time-varying length | Valve spool displacement | ||
| Linear density | Flow Gain | ||
| Viscous damping | Flow-pressure coefficient | ||
| Hydraulic oil bulk modulus of elasticity | Flow coefficient | ||
| Supply pressure | Throttle window area gradient | ||
| Damping coefficient | Total leakage coefficient |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, R.; Wang, N.; Rao, H. Modeling and Adaptive Boundary Robust Control of Active Heave Compensation Systems. J. Mar. Sci. Eng. 2023, 11, 484. https://doi.org/10.3390/jmse11030484
Du R, Wang N, Rao H. Modeling and Adaptive Boundary Robust Control of Active Heave Compensation Systems. Journal of Marine Science and Engineering. 2023; 11(3):484. https://doi.org/10.3390/jmse11030484
Chicago/Turabian StyleDu, Rui, Naige Wang, and Hangyu Rao. 2023. "Modeling and Adaptive Boundary Robust Control of Active Heave Compensation Systems" Journal of Marine Science and Engineering 11, no. 3: 484. https://doi.org/10.3390/jmse11030484
APA StyleDu, R., Wang, N., & Rao, H. (2023). Modeling and Adaptive Boundary Robust Control of Active Heave Compensation Systems. Journal of Marine Science and Engineering, 11(3), 484. https://doi.org/10.3390/jmse11030484