
Course-Keeping Performance of a Container Ship with Various Draft and Trim Conditions under Wind Disturbance

Abstract
:1. Introduction
2. Subject Ship (KCS Container Ship)
2.1. Principal Dimensions
2.2. Loading Conditions
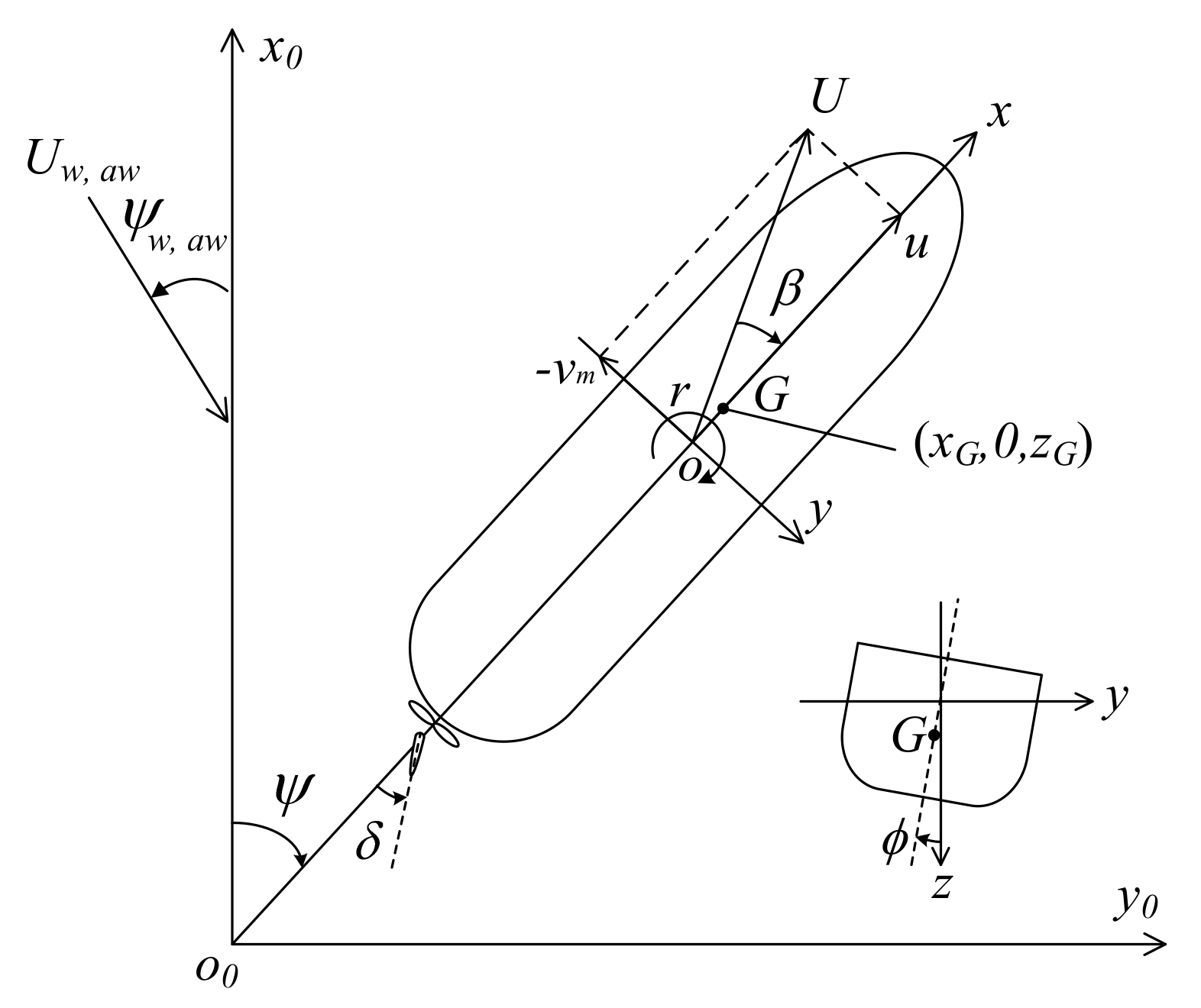
2.3. Coordinate Systems
3. Manoeuvring Mathematical Model
3.1. Motion Equations
3.2. Formulation of Hydrodynamic Forces and Moments
3.2.1. Hull Force
3.2.2. Propeller Force
3.2.3. Rudder Force
3.2.4. Wind Force
4. Estimation of Wind Forces Acting on the Ship
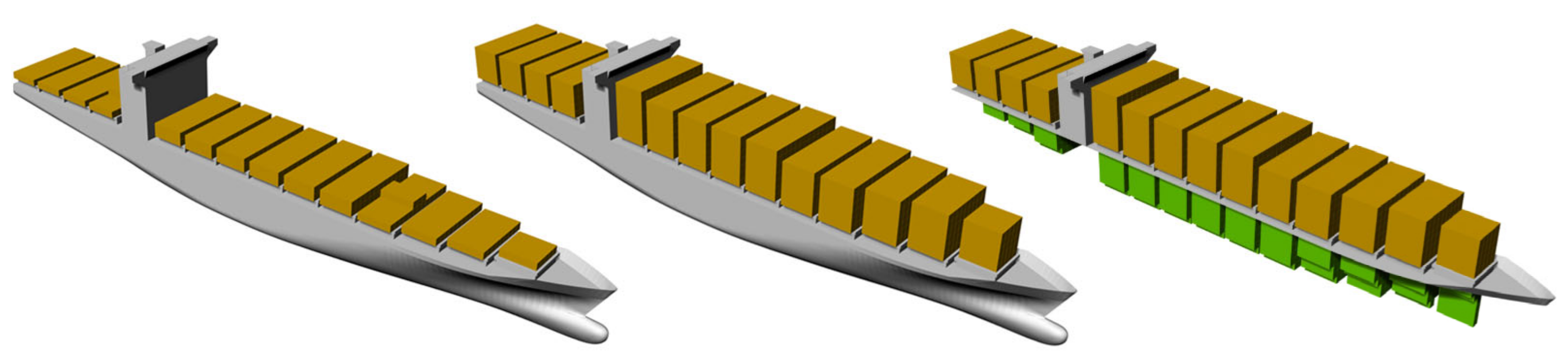
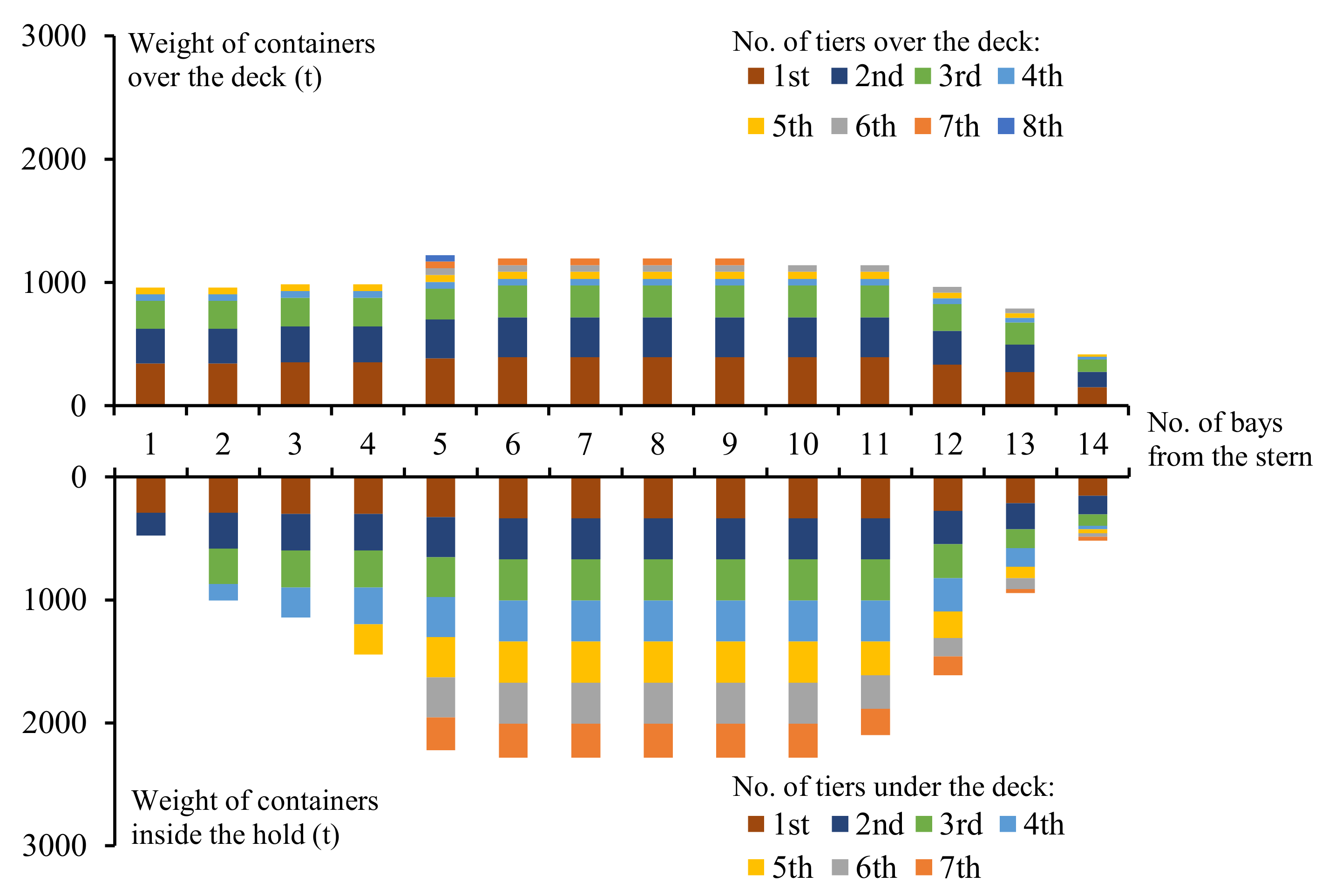
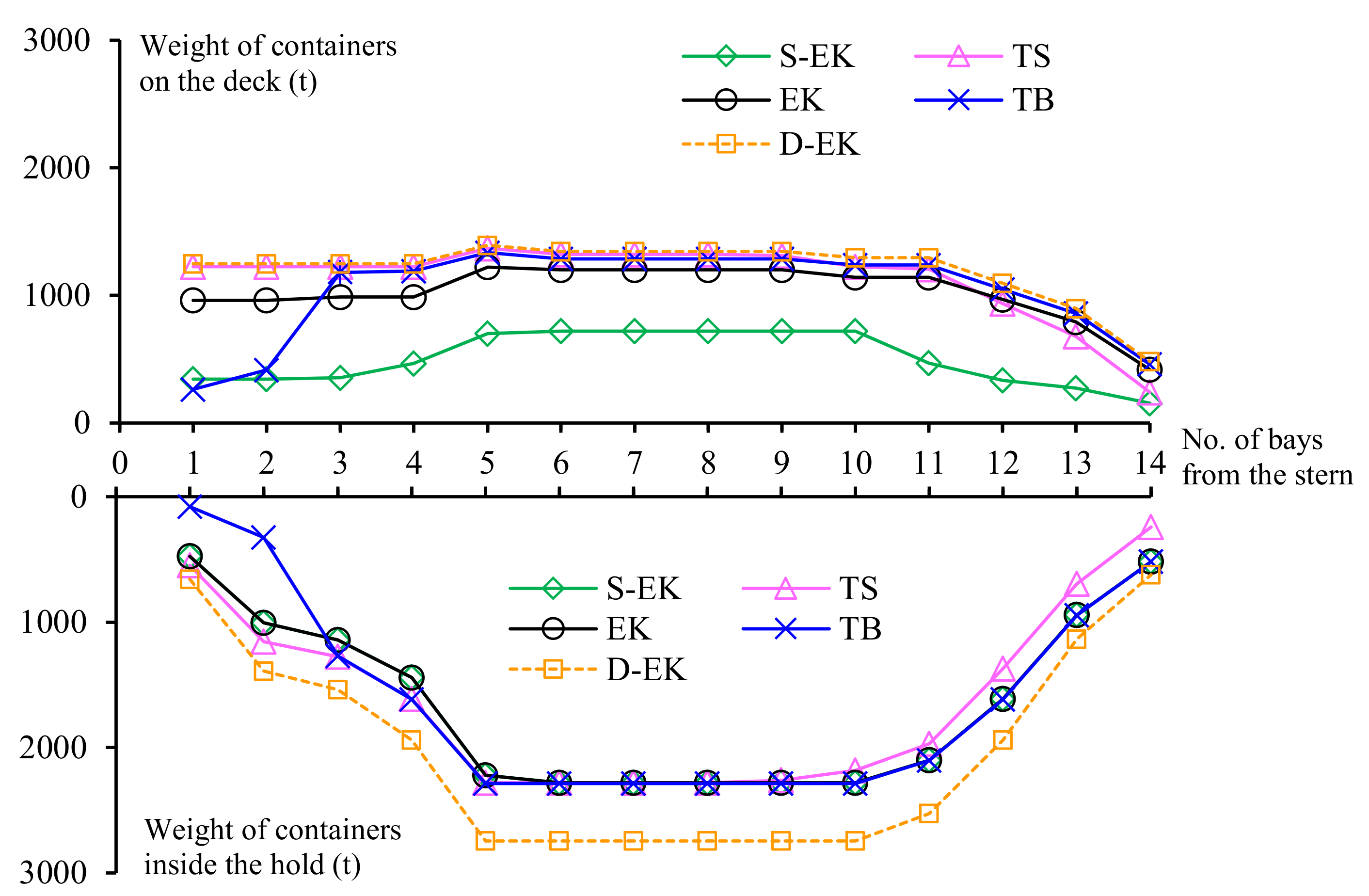
4.1. Design of the Over-Deck Objects
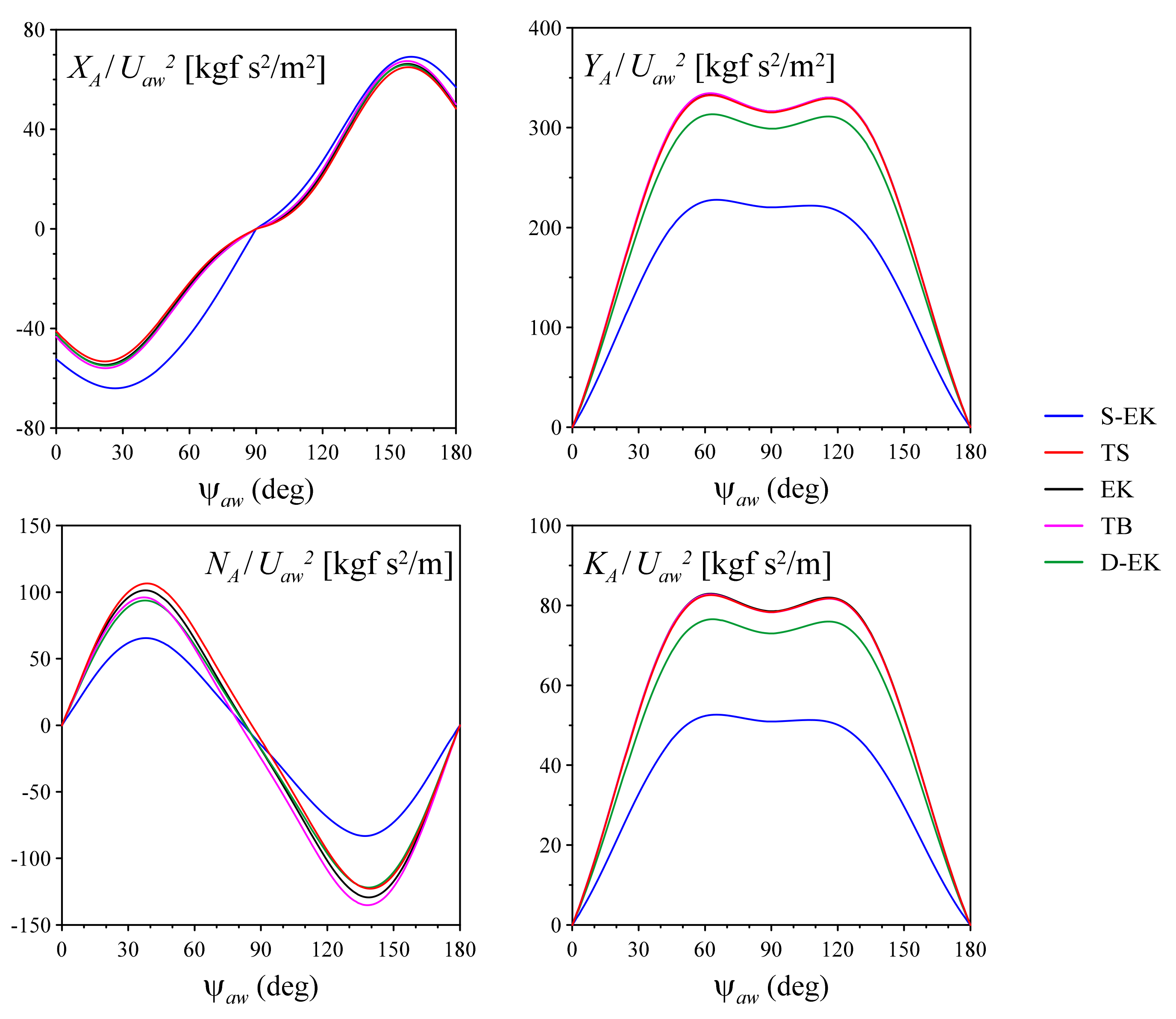
4.2. Estimation of Wind Forces and Moments
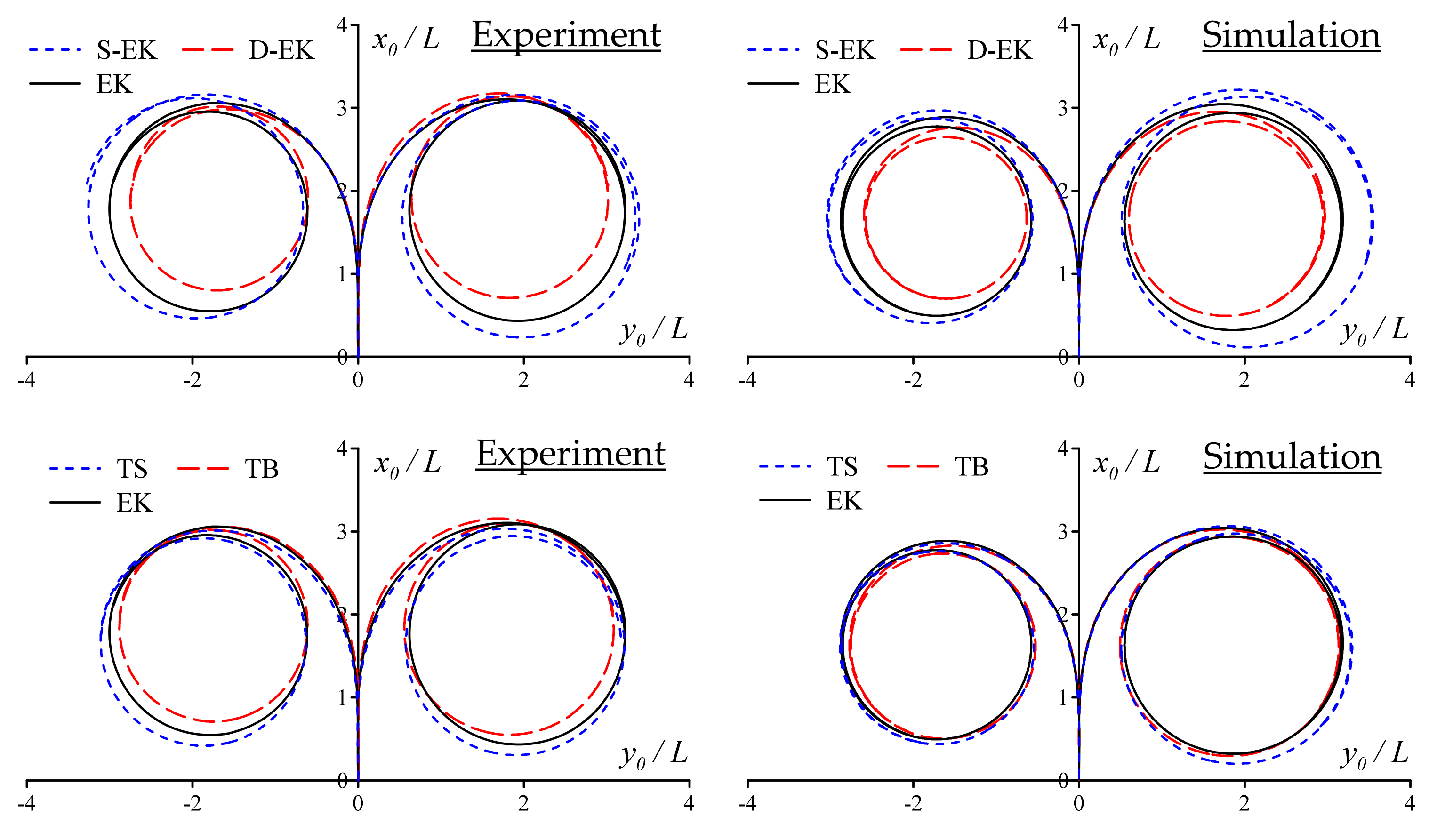
5. Validation of the Manoeuvring Mathematical Model
6. Course-Keeping Simulation
6.1. No True Wind Conditions
6.2. Influence of the Ship Speed and True Wind Angle
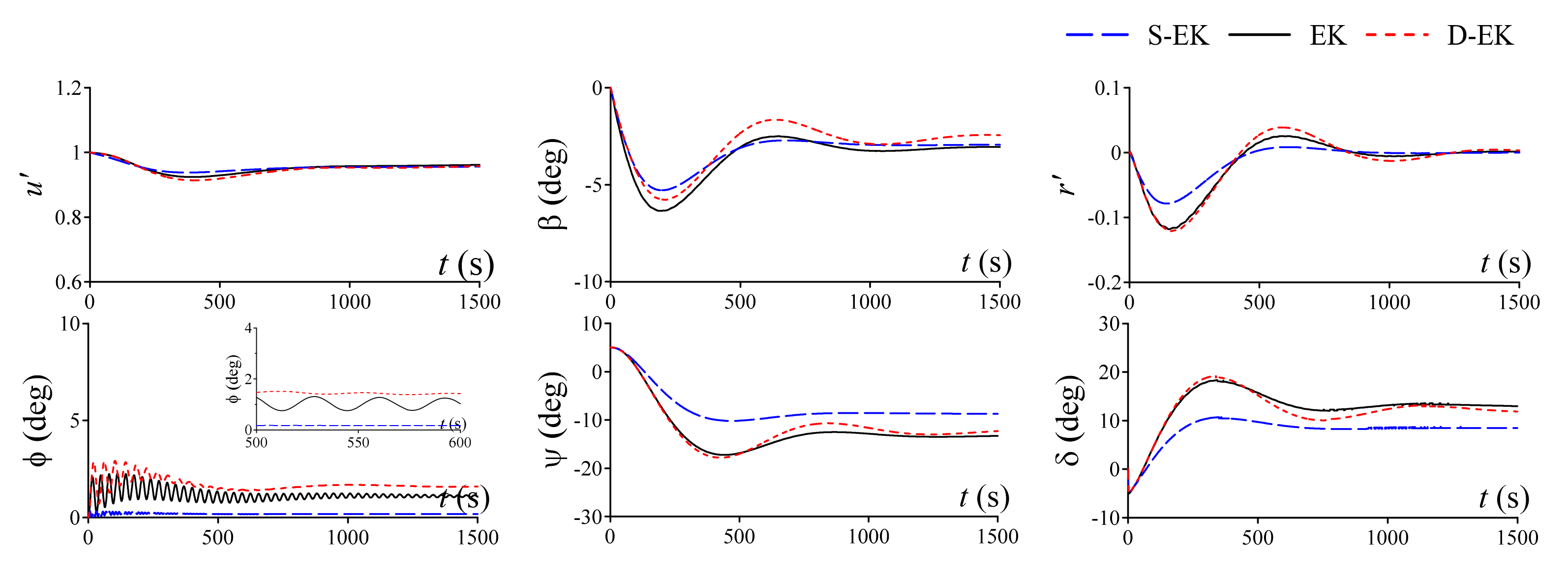
6.3. Influence of Trim and Draft Conditions
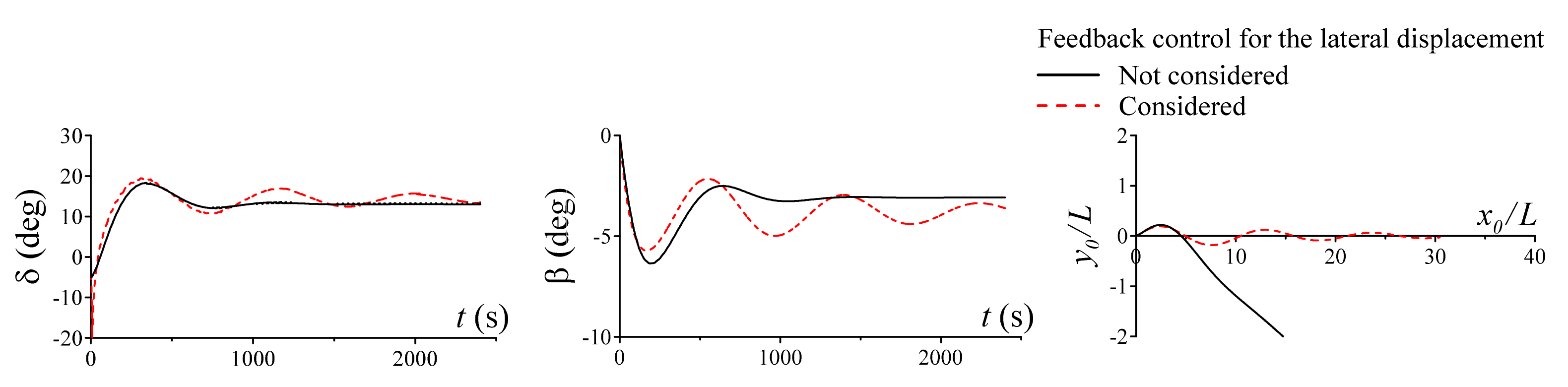
6.4. PD Control Designed to Maintain the Straight Course
7. Equilibrium State under Wind
7.1. Influence of the Apparent Wind Speed under the Constant Ship Speed
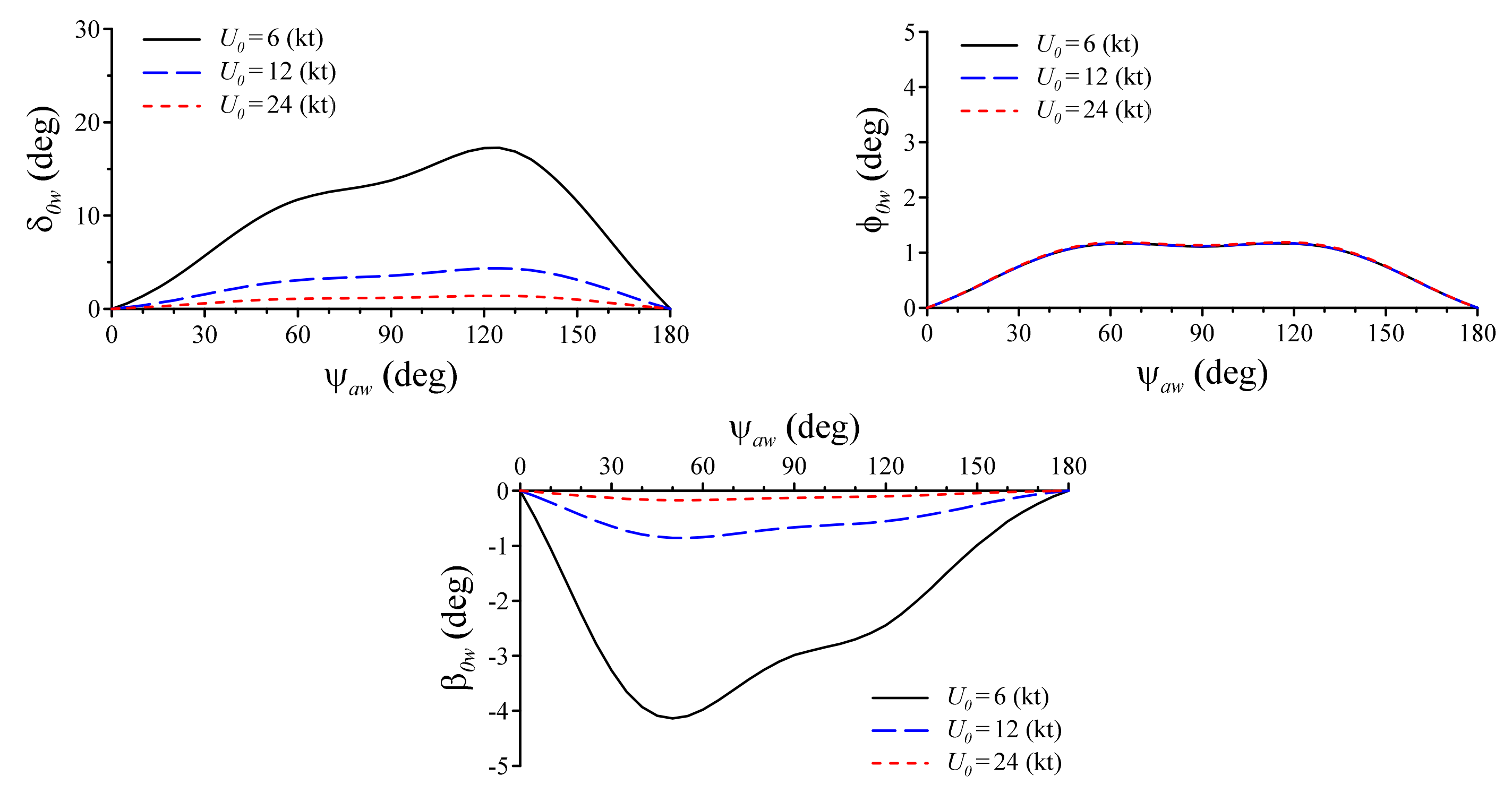
7.2. Influence of the Ship Speed under the Constant Apparent Wind Speed
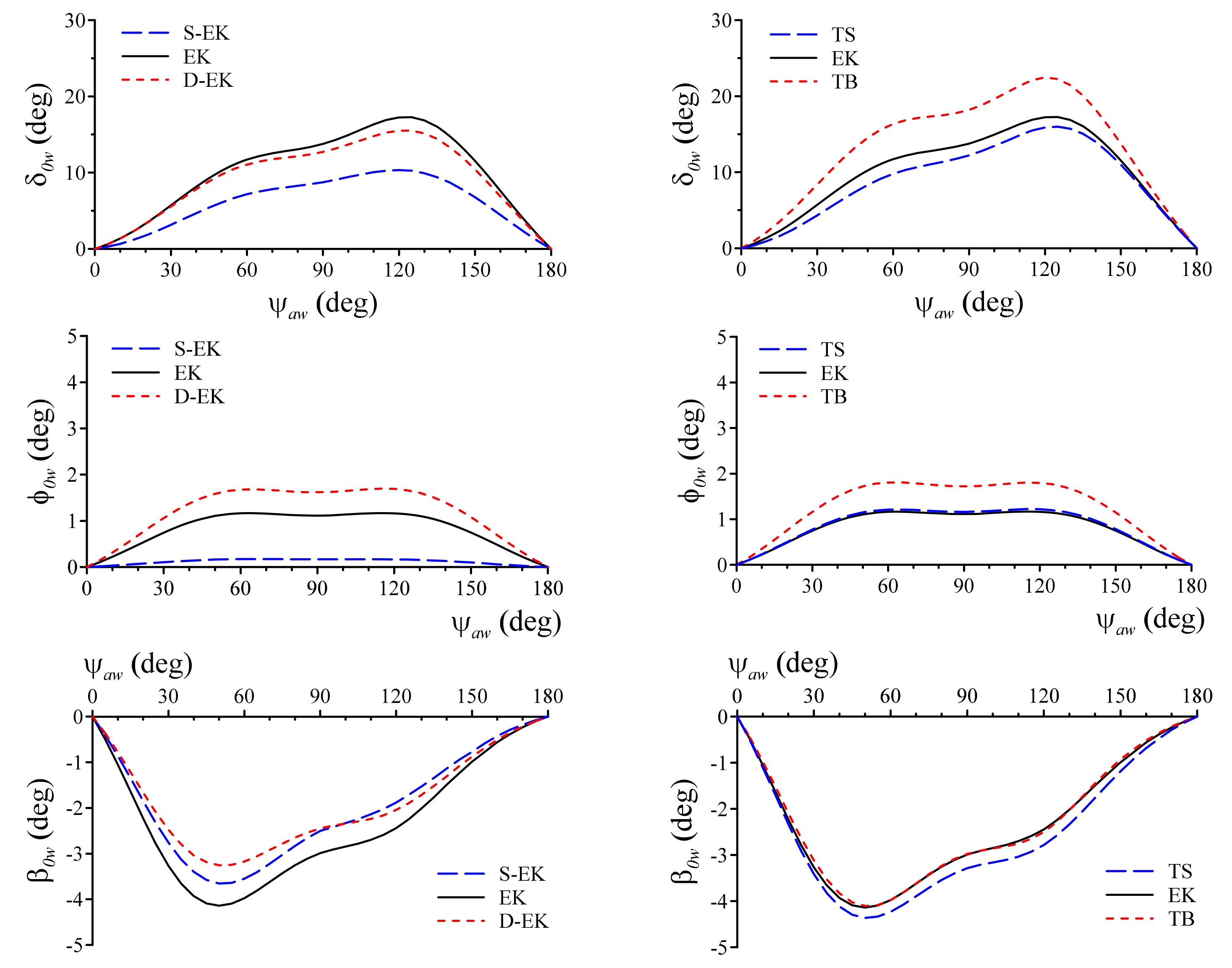
7.3. Influence of the Loading Condition under the Constant Ratio of the Apparent Wind and Ship Speeds
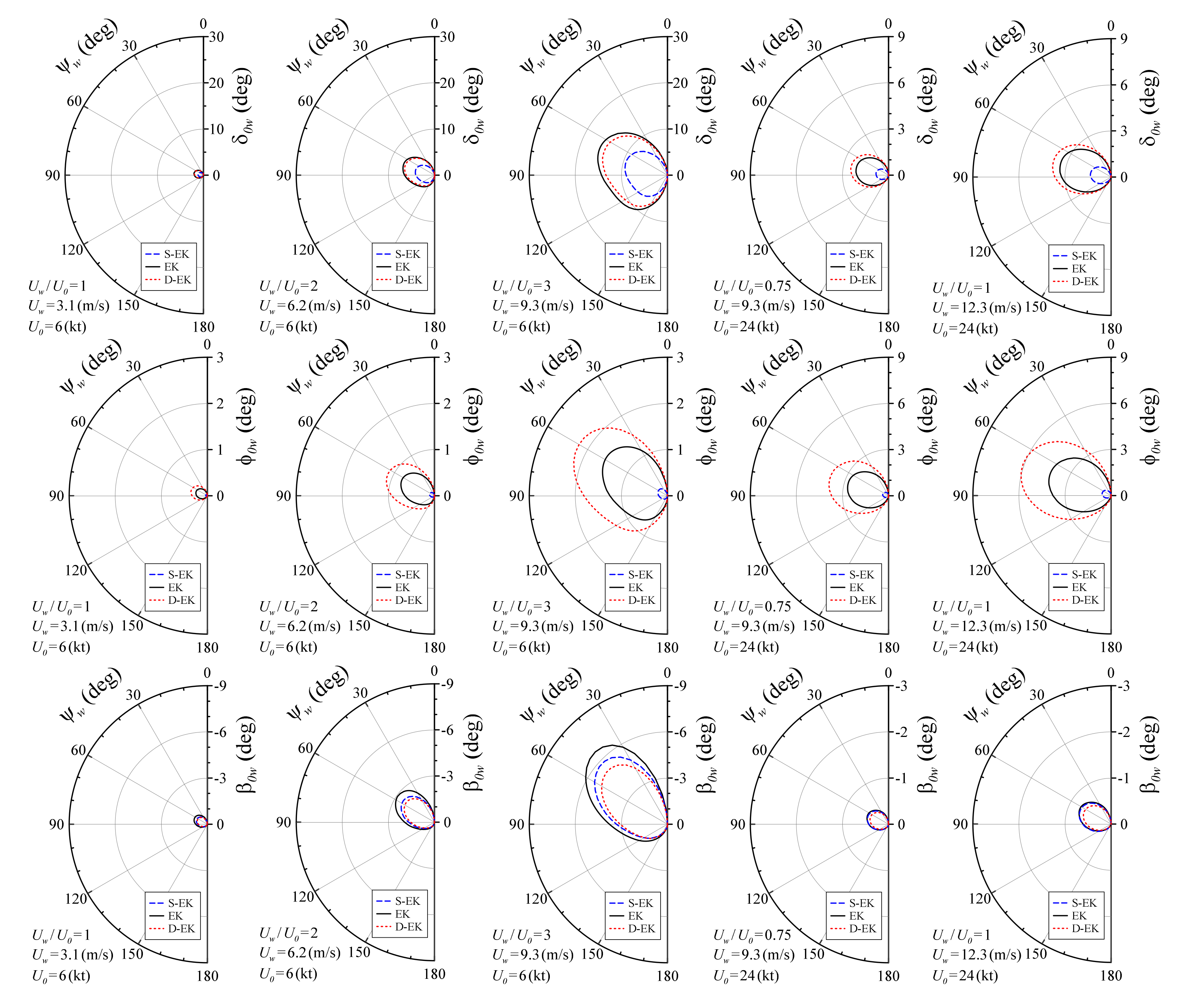
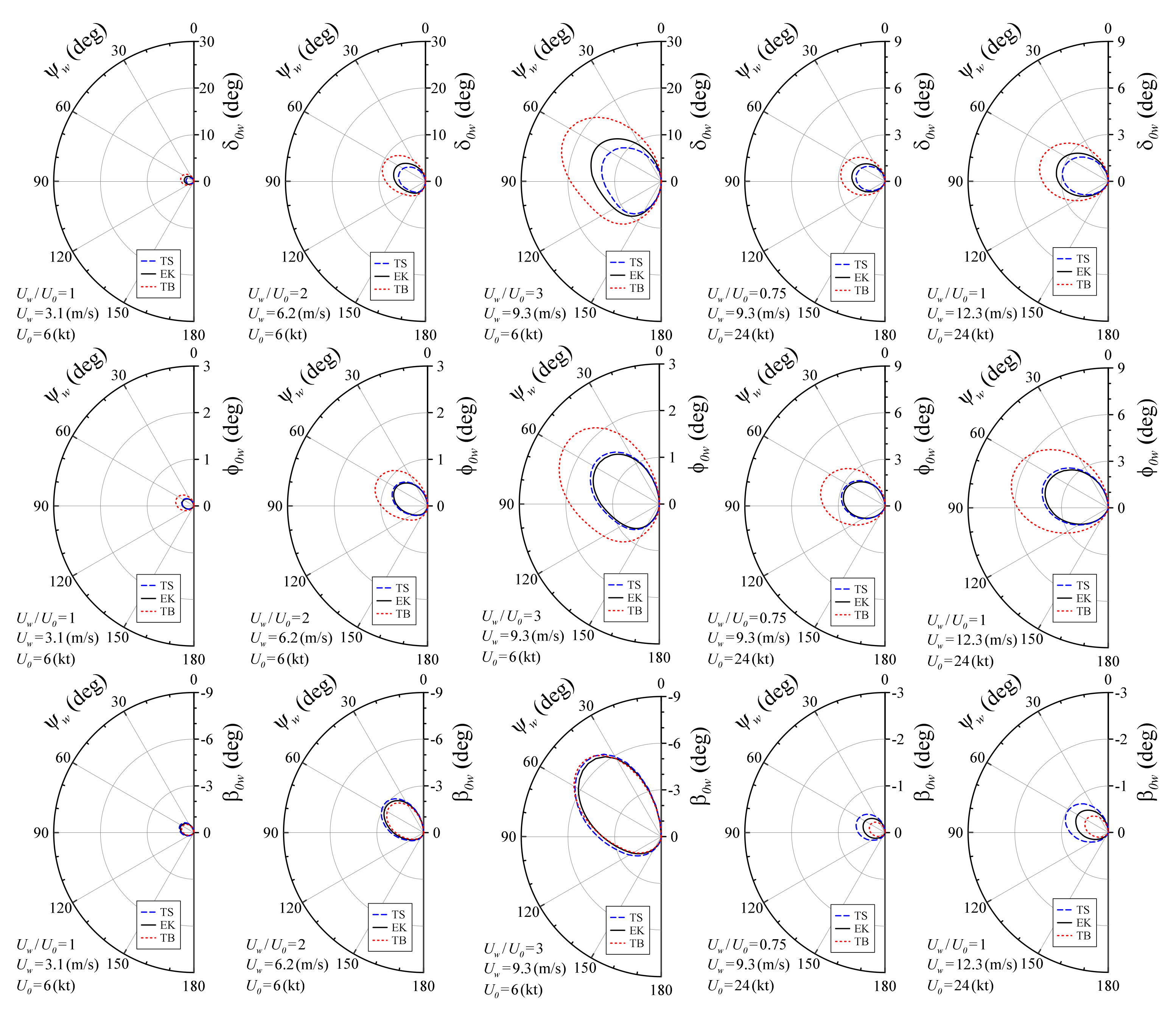
7.4. Discussion of the Equilibrium State Based on the Polar Chart
8. Conclusions
- The check helm angle under wind conditions, which is defined as the rudder angle required to maintain the specified course without deviation, was significantly different among the loading conditions. Meanwhile, the difference in the hull drift angle and roll angle in the equilibrium state was relatively small among them.
- In all cases, maintaining the specified course straight when a wind blew diagonally from behind was the most severe condition, wherein the largest check helm angle was required, and the steering margin was reduced.
- Among the trim-series conditions, the trim by bow required a larger check helm angle, while the trim by stern had a smaller angle. This is related to the essential course stability determined by the hydrodynamic water forces acting on the hull under each loading condition.
- A shallow-draft ship requires a significantly small check helm angle. This is because of the small windage area as well as the better course stability.
- An increase in ship speed is an effective way to reduce the check helm angle by increasing the rudder force.
- A polar chart of the equilibrium state was presented based on the true wind direction and speed. This type of chart has the advantage of allowing users to intuitively grasp the relationship between their ship speed, true wind conditions, and the resultant equilibrium states of the ship.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AP | After Perpendicular | ITTC | International Towing Tank Conference |
| BF | Beaufort scale | KCS | KRISO Container Ship |
| CFD | Computational Fluid Dynamics | MMG | Manoeuvring Modeling Group |
| C.G. | Centre of Gravity | PD | Proportional-Derivative |
| D-EK | Deep draft with even keel condition | S-EK | Shallow draft with even keel condition |
| EK | Full-load draft with even keel condition | TB | Full-load draft with trim by bow condition |
| FEU | Forty-foot Equivalent Unit | TEU | Twenty-foot Equivalent Unit |
| FP | Forward Perpendicular | TS | Full-load draft with trim by stern condition |
| IMO | International Maritime Organization | ||
| Nomenclature | |||
| Projected frontal and lateral windage areas | t | Time | |
| Rudder area w/o horn | Thrust deduction factor | ||
| Rudder-hull interaction factors | Ship speed | ||
| Parameters to estimates wind forces/moments | Initial ship speed | ||
| Vertical acting point of added mass in sway | Apparent and true wind velocities | ||
| Ship breadth | Surge and sway velocities at midship | ||
| Rudder cord length | Axial and lateral inflow velocities to rudder | ||
| Block coefficient | Wake coefficient at propeller | ||
| Parameters related to windage area | Wake coefficient in straight running | ||
| Propeller diameter | Coefficients of wake behaviour against | ||
| Ship draft at AP, midship, and FP | Surge/sway forces and yaw/roll moments | ||
| Rudder normal force | Wind forces and moments | ||
| Rudder lift gradient coefficient | Hull forces and moments | ||
| Metacentre height | Propeller force | ||
| Gravitational acceleration | Rudder forces and moments | ||
| Rudder height | etc. | Hydrodynamic force derivatives | |
| Moment of inertial of ship in roll and yaw | Coordinates of C.G. of ship | ||
| Propeller advanced ratio | Coordinates of propeller | ||
| Added moment of inertia in roll and yaw | Coordinates of vertical acting point of hull and rudder forces | ||
| Propeller thrust open water characteristic | Hull drift angle | ||
| Roll damping coefficients | Geometrical inflow angle to propeller | ||
| Coefficients of | Hull drift angle in equilibrium | ||
| Hight of C.G. of ship from keel | Flow straightening coefficient | ||
| Flow acceleration rate due to propeller | Rudder angle | ||
| Radius of gyration in roll and yaw | Rudder (check helm) angle in equilibrium | ||
| Ship length between perpendicular | Wake fraction ratio at propeller and rudder | ||
| Ship length overall | Rudder aspect ratio | ||
| Effective longitudinal coordinate of rudder | Water density | ||
| Ship mass | Air density | ||
| Added mass in surge and sway | Roll angle | ||
| Number of propeller rotations | Roll angle in equilibrium | ||
| - | Horizontal body axis coordinate system | Ship heading angle | |
| - | Space fixed coordinate system | Initial ship heading angle | |
| Propeller pitch | Apparent and true wind angles | ||
| Resistance coefficient | Ship hull displacement | ||
| Yaw rate | |||
References
- RESOLUTION MSC.137(76): Standards for Ship Manoeuvrability. Available online: https://wwwcdn.imo.org/localresources/en/KnowledgeCentre/IndexofIMOResolutions/MSCResolutions/MSC.137(76).pdf (accessed on 9 April 2023).
- Islam, H.; Soares, C.G. Effect of trim on container ship resistance at different ship speed and drafts. Ocean Eng. 2019, 183, 106–115. [Google Scholar] [CrossRef]
- Reichel, M.; Minchev, A.; Larsen, N.L. Trim optimization—Theory and practice. TransNav 2014, 8, 387–392. [Google Scholar] [CrossRef]
- Himaya, A.N.; Sano, M.; Suzuki, T.; Shirai, M.; Hirata, N.; Matsuda, A.; Yasukawa, H. Effect of the loading conditions on the maneuverability of a container ship. Ocean Eng. 2022, 247, 109964. [Google Scholar] [CrossRef]
- Yasukawa, H.; Himaya, A.N.; Hirata, N.; Matsuda, A. Simulation study of the effect of loading condition changes on the maneuverability of a container ship. J. Mar. Sci. Technol. 2023, 28, 98–116. [Google Scholar] [CrossRef]
- Zhou, Y.; Daamen, W.; Vellinga, T.; Hoogendoorn, S.P. Impacts of wind and current on ship behavior in ports and waterways: A quantitative analysis based on AIS data. Ocean Eng. 2020, 213, 107774. [Google Scholar] [CrossRef]
- Yoshimura, Y.; Nagashima, J. Estimation of the manoeuvring behaviour of ship in uniform wind. J. Soc. Nav. Archit. Jpn. 1985, 158, 125–136. (In Japanese) [Google Scholar] [CrossRef] [PubMed]
- Hasegawa, K.; Kang, D.H.; Sano, M.; Nagarajan, V.; Yamaguchi, M. A study on improving the course-keeping ability of a pure car carrier in windy conditions. J. Mar. Sci. Technol. 2006, 11, 76–87. [Google Scholar] [CrossRef]
- Nagarajan, V.; Kang, D.H.; Hasegawa, K.; Nabeshima, K. Comparison of the mariner Schilling rudder and the mariner rudder for VLCCs in strong winds. J. Mar. Sci. Technol. 2008, 13, 24–39. [Google Scholar] [CrossRef]
- Paroka, D.; Muhammad, A.H.; Asri, S. Maneuverability of ships with small draught in steady wind. Makara J. Technol. 2016, 20, 24–30. [Google Scholar] [CrossRef]
- Im, N.K.; Tran, V.L. Ship’s maneuverability in strong wind. J. Navig. Port Res. Int. Ed. 2008, 32, 115–120. [Google Scholar] [CrossRef]
- Lee, C.K.; Lee, S.G. Hydrodynamic forces between vessels and safe maneuvering under wind-effect in confined waters. J. Mar. Sci. Technol. 2007, 21, 837–843. [Google Scholar] [CrossRef]
- Silva, A.S.; Oleinik, P.H.; Kirinus, E.P.; Costi, J.; Guimaraes, R.C.; Pavlovic, A.; Marques, W.C. Preliminary study on the contribution of external forces to ship behavior. J. Mar. Sci. Eng. 2019, 7, 72. [Google Scholar] [CrossRef]
- Andersen, I.M.V. Wind loads on post-panamax containership. Ocean Eng. 2013, 58, 115–134. [Google Scholar] [CrossRef]
- Janssen, W.D.; Blocken, B.; Wijhe, H.J. CFD simulations of wind loads on a container ship: Validation and impact of geometrical simplifications. J. Wind. Eng. Ind. Aerodyn. 2017, 166, 106–116. [Google Scholar] [CrossRef]
- Seok, J.; Park, J.C. Comparative study of air resistance with and without a superstructure on a container ship using numerical simulation. J. Mar. Sci. Eng. 2020, 8, 267. [Google Scholar] [CrossRef]
- FORCE Technology and Iowa Institute of Hydraulic Research (IIIHR) Part B: Benchmark Test Cases, KCS Description. In Proceedings of the Workshop on Verification and Validation of Ship Manoeuvring Simulation Methods (SIMMAN2008), Copenhagen, Denmark, 14–16 April 2008; pp. B11–B14.
- Lee, S.J.; Koh, M.S.; Lee, C.M. PIV velocity field measurements of flow around a KRISO 3600TEU container ship model. J. Mar. Sci. Technol. 2003, 8, 76–87. [Google Scholar] [CrossRef]
- Islam, H.; Soares, C.G. Estimation of hydrodynamic derivatives of an appended KCS model in open and restricted waters. Ocean Eng. 2022, 266, 112947. [Google Scholar] [CrossRef]
- Hamamoto, M.; Kim, Y.-S. A new coordinate system and equations describing the maneuvering motion of a ship in waves. J. Soc. Nav. Archit. Jpn. 1993, 173, 209–220. (In Japanese) [Google Scholar] [CrossRef]
- Yasukawa, H.; Yoshimura, Y. Introduction of MMG standard method for ship maneuvering predictions. J. Mar. Sci. Technol. 2015, 20, 37–52. [Google Scholar] [CrossRef]
- Fujiwara, T.; Ueno, M.; Ikeda, Y. A new estimation method of wind forces and moments acting on ships on the basis of physical component models. J. Jpn. Soc. Nav. Archit. Ocean Eng. 2005, 2, 243–255. (In Japanese) [Google Scholar]
- ITTC Quality System Manual—Recommended Procedures and Guidelines: Preparation, Conduct and Analysis of Speed/Power Trials. Available online: https://www.ittc.info/media/9874/75-04-01-011.pdf (accessed on 9 April 2023).
- ITTC Quality System Manual—Recommended Procedures and Guidelines: 1978 ITTC Performance Prediction Method. Available online: https://www.ittc.info/media/8017/75-02-03-014.pdf (accessed on 9 April 2023).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Symbol | Real Scale | Model Scale |
|---|---|---|---|
| Length | [m] | 230 | 3.057 |
| Breadth | B [m] | 32.2 | 0.428 |
| Item | Symbol | Real Scale | Model Scale | |
|---|---|---|---|---|
| Propeller | Diameter | [m] | 7.9 | 0.105 |
| Pitch ratio | P/ | 0.997 | 0.997 | |
| Rudder | Height | [m] | 9.9 | 0.132 |
| Cord length | [m] | 5.5 | 0.0731 | |
| Aspect ratio | 1.8 | 1.8 | ||
| Area w/ horn | [m2] | 54.43 | 0.0096 | |
| Symbol | S-EK | TS | EK | TB | D-EK |
|---|---|---|---|---|---|
| [m] | 9.6 | 11.99 | 10.8 | 9.6 | 11.99 |
| [m] | 9.6 | 10.8 | 10.8 | 10.8 | 11.99 |
| [m] | 9.6 | 9.6 | 10.8 | 11.99 | 11.99 |
| [m3] | 44,889 | 52,044 | 52,044 | 52,044 | 59,625 |
| 0.631 | 0.651 | 0.651 | 0.651 | 0.671 |
| Symbol | S-EK | TS | EK | TB | D-EK |
|---|---|---|---|---|---|
| −2.17 | −7.77 | −3.41 | 0.50 | −4.86 | |
| 11.86 | 14.67 | 14.32 | 14.26 | 14.70 | |
| 3.03 | 0.60 | 0.63 | 0.40 | 0.36 | |
| [-] | 0.329 | 0.382 | 0.378 | 0.378 | 0.374 |
| [-] | 0.238 | 0.246 | 0.246 | 0.234 | 0.247 |
| Symbol | S-EK | TS | EK | TB | D-EK |
|---|---|---|---|---|---|
| [m2] | 1234 | 1182 | 1198 | 1212 | 1159 |
| [m2] | 3934 | 5665 | 5676 | 5670 | 5391 |
| [m] | −5.40 | −2.83 | −4.64 | −6.37 | −4.78 |
| [m] | 9.29 | 13.27 | 13.31 | 13.36 | 12.76 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Himaya, A.N.; Sano, M. Course-Keeping Performance of a Container Ship with Various Draft and Trim Conditions under Wind Disturbance. J. Mar. Sci. Eng. 2023, 11, 1052. https://doi.org/10.3390/jmse11051052
Himaya AN, Sano M. Course-Keeping Performance of a Container Ship with Various Draft and Trim Conditions under Wind Disturbance. Journal of Marine Science and Engineering. 2023; 11(5):1052. https://doi.org/10.3390/jmse11051052
Chicago/Turabian StyleHimaya, Andi Nadia, and Masaaki Sano. 2023. "Course-Keeping Performance of a Container Ship with Various Draft and Trim Conditions under Wind Disturbance" Journal of Marine Science and Engineering 11, no. 5: 1052. https://doi.org/10.3390/jmse11051052