4.3. Simulation Environment
Three motion-tracking experiments are conducted in this simulation experiment,
,
, and
, respectively. The
and
are designed to compare the control performance between the improved LMPC, the traditional LMPC method [
36], and the nonlinear MPC method [
29]. The
is used to demonstrate the control performance of the improved LMPC method for the horizontal direction and posture of CDPM. Part of the simulation parameters are shown in
Table 3. The cable health state in
and
is set as follows:
- (1)
When , there is zero broken cable;
- (2)
When ,there is one broken cable-stayed cable ( cable);
- (3)
When , there are two broken cable-strayed cables ( cables).
Remark 4. The main differences between this work and the reference [29] include the following: - (1)
The tension thresholds in [29] are pre-set, experiential, and fixed during movement, while the values are dynamic adaptive in this work. - (2)
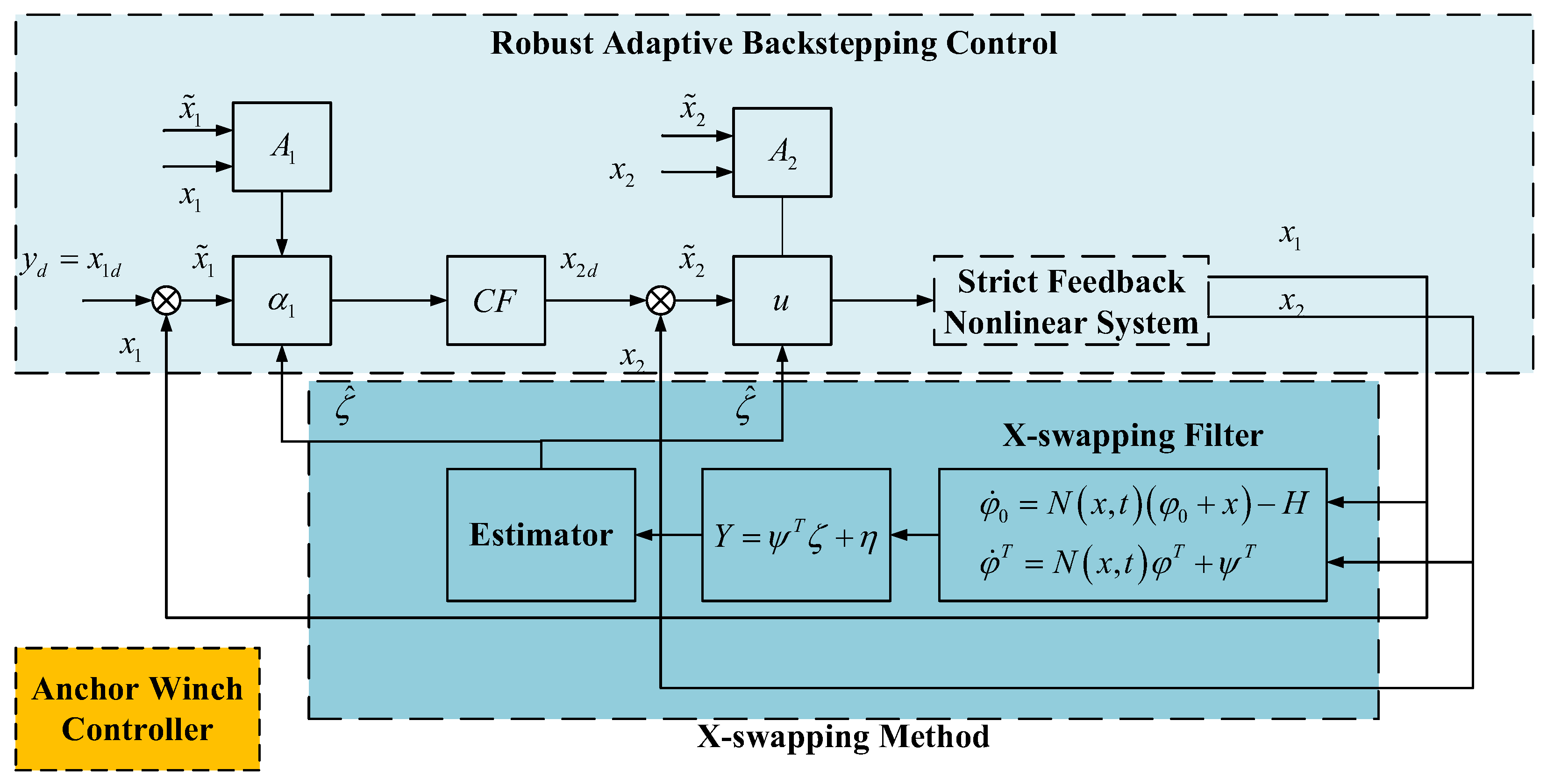
The nonlinear model predictive control method is used in [29] to control the nonlinear system. In contrast, the X−swapping method is used in this work to transform the nonlinear parameters to linear parameters, reducing the calculation costs and control error of the improved LMPC. - (3)
This work converts the cable tension into the desired angular displacement, which is the input of the winch controller. In contrast, the cable tension is set as the control input in [29]. To avoid sudden changes in the remaining cable tension, caused by part cable break-downs, this article only runs the NMPC method in stable state1 (0–15 s).
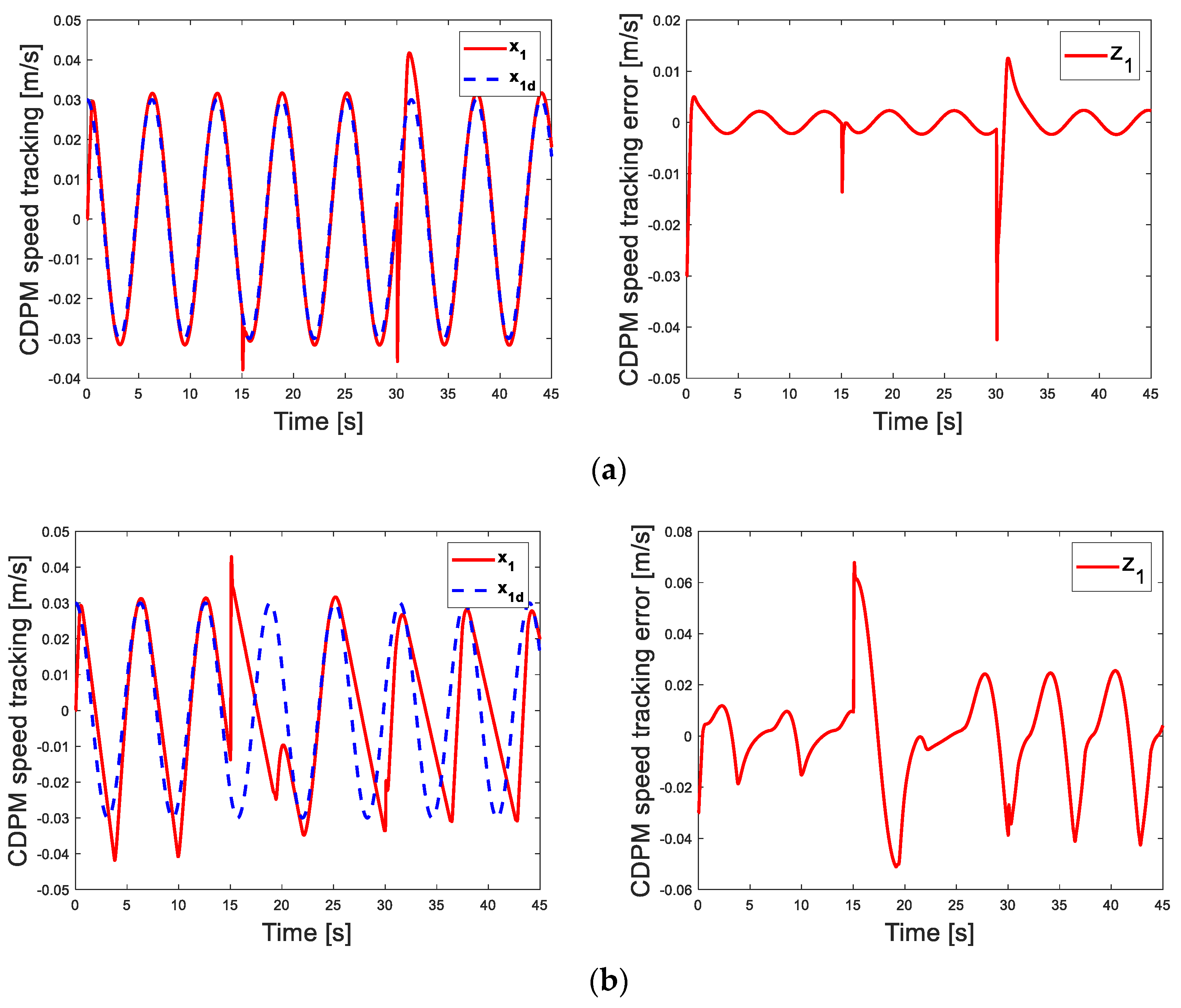
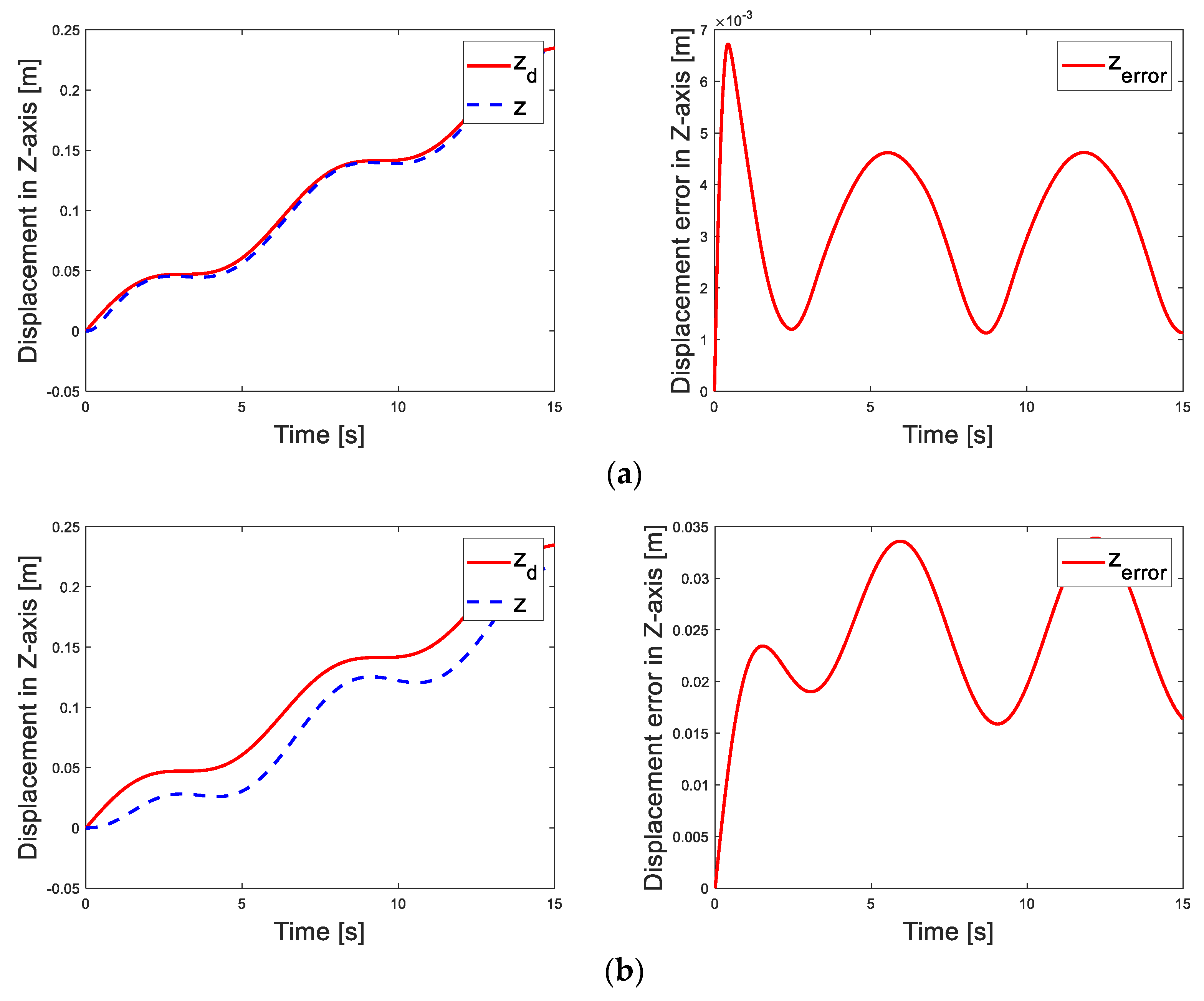
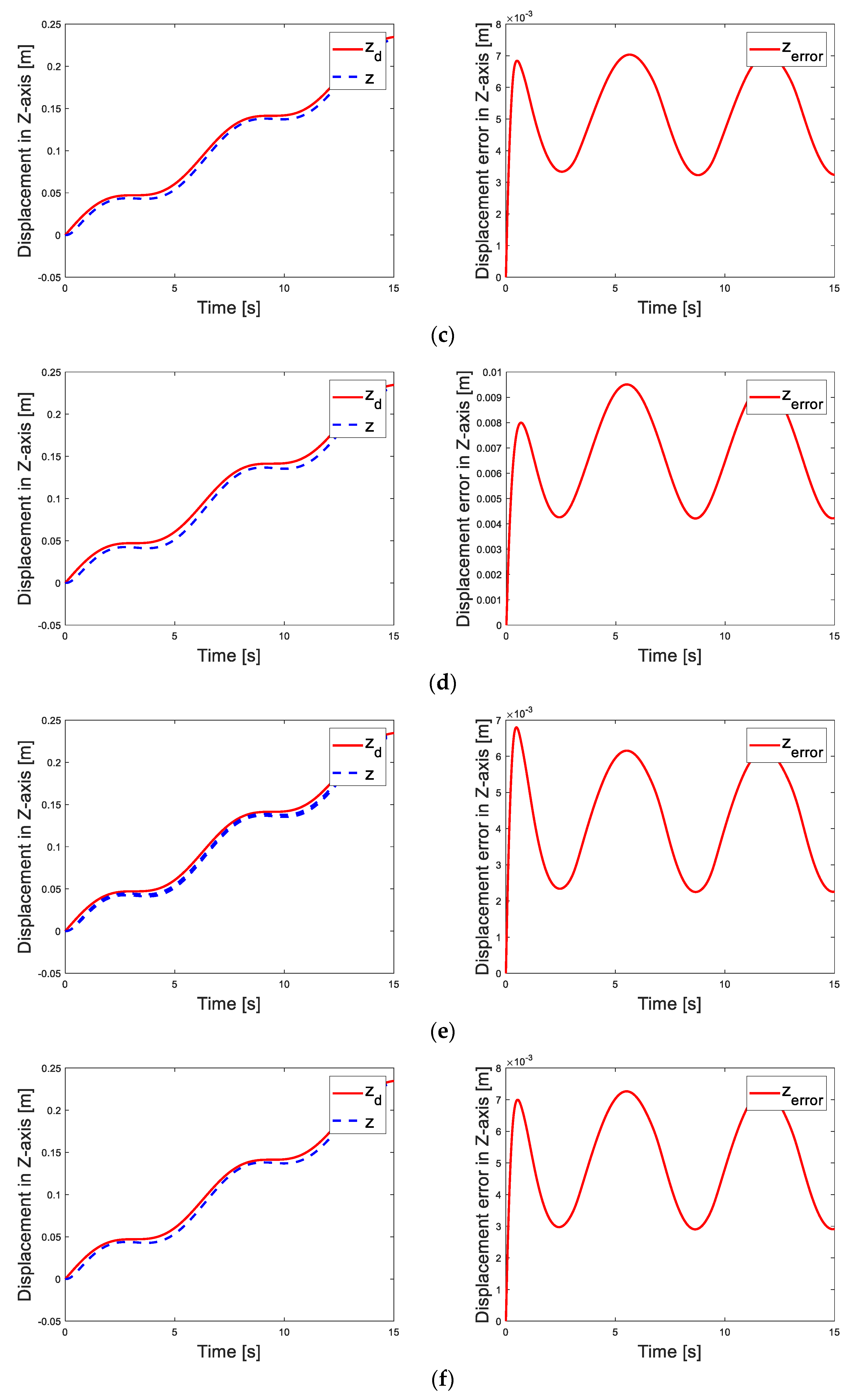
Figure 7a–d represent the speed tracking and tracking error in several situations; the data analyses are summarized in
Table 5. It is easy to find that the entire stage is divided into three parts: all cables intact (0–15 s), one broken cable-stayed cable (15–30 s), and two broken cable-stayed cables (30–45 s). There is significant vibration at 15 s and 30 s, meaning the underwater CDPM experienced a violent upward movement at the cable breakage (the floating speed is negative). According to
Table 5, it is clear that when
, the maximum error value (
) of the improved LMPC method under stable states (2–15, 16–28, and 33–45 s) are 0.0022, 0.0023, and 0.0025, respectively, which are all smaller than the values (0.0187, 0.0526, and 0.0425) of traditional LMPC. When
, the maximum error of the improved LMPC method is still minor compared to the traditional LMPC (
,
, and
). We can conclude that under the same desired speed and conditions, the improved LMPC with the DMPC method has higher accuracy than traditional MPC methods requiring the manual setting of the lower tension threshold. Compared with
Figure 7a,c,e,f, we can also draw a similar conclusion that systems with minimum dynamic tension values have better control accuracy than systems with fixed minimum tension values. Moreover, as shown in
Figure 7a,b, we can find that the system with improved LMPC can overcome the impact of cable breakage in a shorter period than the system with the traditional LMPC method. This phenomenon means that the improved LMPC with the DMPC method increases the control accuracy and stability of the system. A similar situation also occurs in
Figure 7c,d. These phenomena indicate that the system using the improved LMPC method us more robust than the traditional LMPC method.
Moreover, we find that in
Table 5 a, c, and d, the proportion of steady-state error to total amplitude (
) is less than 10%. On the contrary, in
Table 5 b, and e, the proportion of steady-state error to total amplitude (
) far exceeds 10%. And in
Table 5 f, the value slightly exceeds 10%. These phenomena mean that the improved LMPC with the DMPC method can better adapt to different speeds and ensure tracking accuracy. Correspondingly, the traditional LMPC met control requirements in
and failed in
. According to the comparison results between
Figure 7a–f, we can conclude that the improved LMPC can meet different motion speeds without manually setting the minimum tension threshold, which means the better adaptability, fewer prior knowledge requirements, and a broader application range.
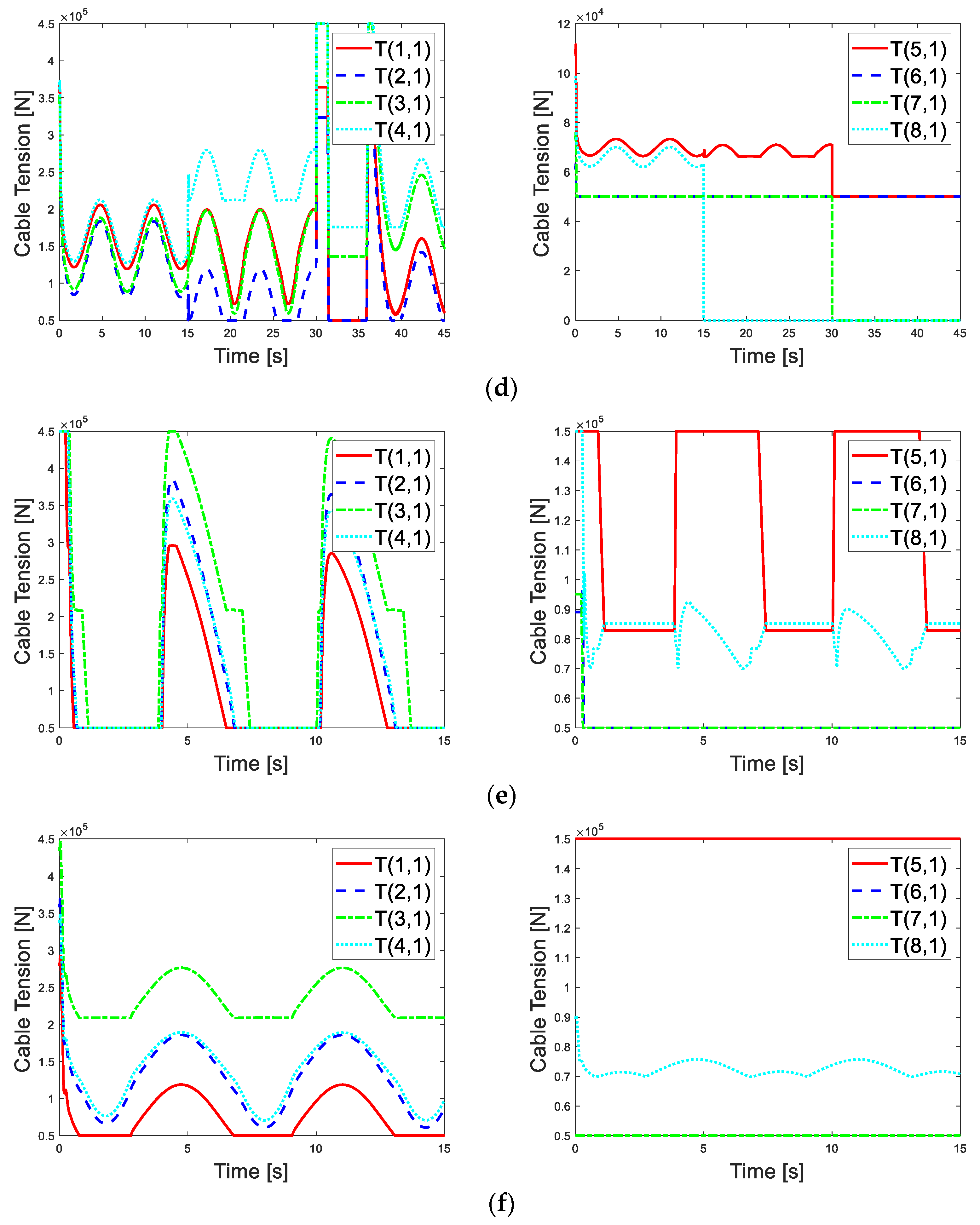
Figure 8a–f represents the tension distribution under different CDPM speeds and winch cable states. The data analyses are summarized in
Table 6,
Table 7,
Table 8,
Table 9,
Table 10,
Table 11,
Table 12 and
Table 13. According to
Figure 8a–f, we can find that the vertical cable-tension values (
) are generally higher than those of the cable-stayed cable (
). This result is consistent with experience, and we can regard the vertical cable tension as the main factor causing platform motion. In contrast, the cable-stayed cables are chosen as auxiliary influencing factors of platform motion. By comparing the maximum and minimum cable-tension values under various stable states in
Table 6,
Table 7,
Table 8,
Table 9,
Table 10,
Table 11,
Table 12 and
Table 13, we can find the following situations:
- (1)
In most cases, systems using the improved LMPC method have a maximum cable tension lower than the traditional LMPC method and NMPC under stable conditions. According to [
27], the lower maximum tension effectively avoids the impact of excessive cable tension on equipment safety, avoids actuator input saturation, and reduces power cost.
- (2)
In most cases, systems using the improved LMPC method have lower minimum cable-tension values under stable conditions than systems with traditional LMPC method and NMPC method. These phenomena represent that the former system provides a bigger workspace for the CDPM in all states. Therefore, we can conclude that the improved LMPC method can provide larger workspace and better adaptability.
- (3)
As shown in
Table 12 and
Table 13, we can find that in most cases, the average fluctuation amplitude of cable tension in the system with the improved LMPC method is smaller than the system with the traditional LMPC method and NMPC method. According to [
27], the magnitude of stress changes in the cable affects the fatigue and safety of the cable. Therefore, we can conclude that the improved LMPC method has smaller tension amplitude variation, minor cable fatigue, and better equipment safety than the traditional LMPC method and NMPC method.
- (4)
As shown in
Figure 8a–d, we can find that the improved LMPC method with DMPC can recover from the extreme tension value (upper or lower tension limit) to the usual tension range in a shorter time, which significantly reduces the possible elastic deformation, performance degradation, and cable-sliding phenomenon of the cable under extreme tension.
- (5)
As shown in
Figure 8a–d and
Table 6,
Table 7,
Table 8,
Table 9,
Table 10,
Table 11,
Table 12 and
Table 13, we can observe that the cable tension is relatively low at times (in stages 2 and 3 of cable states, part cable breakage). Therefore, the cable slipping caused by low cable tension may affect the motion control accuracy of the platform.
Figure 8.
(a) Distribution of cable tension () under cosine motion () based on the improved LMPC method. (b) Distribution of cable tension () under cosine motion () based on compared traditional LMPC. (c) Distribution of cable tension () under cosine motion () based on the improved LMPC method. (d) Distribution of cable tension () under cosine motion () based on compared traditional LMPC. (e) Distribution of cable tension () under cosine motion () based on compared NMPC with fixed tension thresholds. (f) Distribution of cable tension () under cosine motion () based on compared NMPC with fixed tension thresholds.
Figure 8.
(a) Distribution of cable tension () under cosine motion () based on the improved LMPC method. (b) Distribution of cable tension () under cosine motion () based on compared traditional LMPC. (c) Distribution of cable tension () under cosine motion () based on the improved LMPC method. (d) Distribution of cable tension () under cosine motion () based on compared traditional LMPC. (e) Distribution of cable tension () under cosine motion () based on compared NMPC with fixed tension thresholds. (f) Distribution of cable tension () under cosine motion () based on compared NMPC with fixed tension thresholds.
Table 6.
Data analyses of cable-tension distribution.
Table 6.
Data analyses of cable-tension distribution.
| Figure 8 | (a) | (a) |
|---|
| N
| | | | | | | | |
|---|
| Stable state1 (2~15 s) | Maximum tension | 2.9652 | 2.5480 | 2.6718 | 3.1164 | 1.1316 | 0.9024 | 0.7743 | 1.1448 |
| Minimum tension | 0.23623 | 0.2144 | 0.2211 | 0.2453 | 0.0785 | 0.0159 | 0.0335 | 0.0793 |
| Tension amplitude | 2.7289 | 2.3336 | 2.4507 | 2.8710 | 1.0531 | 0.8865 | 0.7408 | 1.0655 |
| Stable state2 (16~28 s) | Maximum tension | 3.0113 | 2.6904 | 3.0464 | 3.4023 | 0.8161 | 0.1096 | 0.6328 | 0 |
| Minimum tension | 0.0109 | 0.0011 | 0.0101 | 0.1235 | 0.0315 | 0.0012 | 0.0013 | 0 |
| Tension amplitude | 3.0004 | 2.6893 | 3.0362 | 3.2788 | 0.7846 | 0.1084 | 0.6315 | 0 |
| Stable state3 (33~45 s) | Maximum tension | 2.8573 | 2.8485 | 3.3497 | 3.4044 | 0.2871 | 0.1976 | 0 | 0 |
| Minimum tension | 0.0004 | 0.0016 | 0.0011 | 0.1237 | 0.0301 | 0.0021 | 0 | 0 |
| Tension amplitude | 2.8569 | 2.8469 | 3.3486 | 3.2807 | 0.2570 | 0.1955 | 0 | 0 |
Average tension
amplitude | 2.8621 | 2.6233 | 2.9452 | 3.1435 | 0.6982 | 0.3968 | 0.4574 | 0.3552 |
Table 7.
Data analyses of cable-tension distribution.
Table 7.
Data analyses of cable-tension distribution.
| Figure 8 | (b) | (b) |
|---|
| N
| | | | | | | | |
|---|
| Stable state1 (2~15 s) | Maximum tension | 3.4400 | 3.2961 | 3.2997 | 3.4826 | 1.0394 | 0.5880 | 0.7057 | 0.9265 |
| Minimum tension | 0.5 | 0.5 | 0.5 | 0.5 | 0.6426 | 0.5 | 0.5 | 0.5958 |
| Tension amplitude | 2.9400 | 2.7961 | 2.7997 | 2.9826 | 0.3968 | 0.08797 | 0.2057 | 0.3307 |
| Stable state2 (16~28 s) | Maximum tension | 4.5 | 2.8783 | 4.5 | 4.5 | 1.0257 | 0.5 | 0.7679 | 0 |
| Minimum tension | 0.5 | 0.5 | 0.5 | 2.1089 | 0.6626 | 0.5 | 0.5 | 0 |
| Tension amplitude | 4.0000 | 2.3783 | 4.0000 | 2.3911 | 0.3631 | 0 | 0.2679 | 0 |
| Stable state3 (33~45 s) | Maximum tension | 3.6428 | 3.2375 | 4.5 | 4.5 | 0.5 | 0.5 | 0 | 0 |
| Minimum tension | 0.5 | 0.5 | 1.3585 | 1.7556 | 0.5 | 0.5 | 0 | 0 |
| Tension amplitude | 3.1428 | 2.7375 | 3.1415 | 2.7444 | 0 | 0 | 0 | 0 |
Average tension
amplitude | 3.3609 | 2.6373 | 3.3137 | 2.7060 | 0.2533 | 0.0293 | 0.1579 | 0.1102 |
Table 8.
Data analyses of cable-tension distribution.
Table 8.
Data analyses of cable-tension distribution.
| Figure 8 | (c) | (c) |
|---|
| N
| | | | | | | | |
|---|
| Stable state1 (2~15 s) | Maximum tension | 2.0483 | 1.7951 | 1.8754 | 2.1479 | 0.7422 | 0.5729 | 0.4915 | 0.7575 |
| Minimum tension | 1.1353 | 1.0457 | 1.0826 | 1.1836 | 0.3544 | 0.2448 | 0.2099 | 0.3718 |
| Tension amplitude | 0.9129 | 0.7494 | 0.7928 | 0.9643 | 0.3878 | 0.3281 | 0.2816 | 0.3857 |
| Stable state2 (16~28 s) | Maximum tension | 2.0136 | 1.7847 | 2.0397 | 2.2911 | 0.5468 | 0.0688 | 0.4136 | 0 |
| Minimum tension | 1.0087 | 0.8731 | 1.0259 | 1.1724 | 0.2756 | 0.0293 | 0.1941 | 0 |
| Tension amplitude | 1.0050 | 0.9115 | 1.0138 | 1.1188 | 0.2712 | 0.0395 | 0.2195 | 0 |
| Stable state3 (33~45 s) | Maximum tension | 1.9132 | 1.9003 | 2.2384 | 2.2819 | 0.1985 | 0.1176 | 0 | 0 |
| Minimum tension | 0.9054 | 0.8883 | 1.0519 | 1.0831 | 0.1035 | 0.0345 | 0 | 0 |
| Tension amplitude | 1.0078 | 1.0120 | 1.1865 | 1.1988 | 0.0950 | 0.0831 | 0 | 0 |
Average tension
amplitude | 0.9752 | 0.8910 | 0.9977 | 1.094 | 0.2513 | 0.1502 | 0.1670 | 0.1286 |
Table 9.
Data analyses of cable-tension distribution.
Table 9.
Data analyses of cable-tension distribution.
| Figure 8 | (d) | (d) |
|---|
| N
| | | | | | | | |
|---|
| Stable state1 (2~15 s) | Maximum tension | 2.0566 | 1.8328 | 1.8837 | 2.1268 | 7.3364 | 5 | 5 | 7.0068 |
| Minimum tension | 1.1908 | 0.8121 | 0.8883 | 1.2701 | 6.6452 | 5 | 5 | 6.2017 |
| Tension amplitude | 0.8658 | 1.0207 | 0.9953 | 0.8567 | 0.6912 | 0 | 0 | 0.8051 |
| Stable state2 (16~28 s) | Maximum tension | 1.9968 | 1.1931 | 1.9873 | 2.8026 | 7.1008 | 5 | 5 | 0 |
| Minimum tension | 0.7189 | 0.5 | 0.5934 | 2.1186 | 6.6131 | 5 | 5 | 0 |
| Tension amplitude | 1.2779 | 0.6931 | 1.3939 | 0.6840 | 0.4877 | 0 | 0 | 0 |
| Stable state3 (33~45 s) | Maximum tension | 3.6429 | 3.2375 | 4.5 | 4.5 | 5 | 5 | 0 | 0 |
| Minimum tension | 0.5 | 0.5 | 1.3587 | 1.7556 | 5 | 5 | 0 | 0 |
| Tension amplitude | 3.1429 | 2.7375 | 3.1413 | 2.7444 | 0 | 0 | 0 | 0 |
Average tension
amplitude | 1.7622 | 1.4837 | 1.8435 | 1.4283 | 0.3927 | 0 | 0 | 0.2684 |
Table 10.
Data analyses of cable-tension distribution.
Table 10.
Data analyses of cable-tension distribution.
| Figure 8 | (e) | (e) |
|---|
| N
| | | | | | | | |
|---|
| Stable state1 (2~15 s) | Maximum tension | 2.9582 | 3.8497 | 4.5 | 3.5904 | 1.5 | 0.5 | 0.5 | 0.9241 |
| Minimum tension | 0.5 | 0.5 | 0.5 | 0.5 | 0.8287 | 0.5 | 0.5 | 0.6982 |
| Tension amplitude | 2.4582 | 3.3497 | 4.0 | 3.0904 | 0.6713 | 0 | 0 | 0.2259 |
Table 11.
Data analyses of cable-tension distribution.
Table 11.
Data analyses of cable-tension distribution.
| Figure 8 | (f) | (f) |
|---|
| N
| | | | | | | | |
|---|
| Stable state1 (2~15 s) | Maximum tension | 1.1885 | 1.8590 | 2.7655 | 1.8938 | 1.5 | 1.5 | 0.5 | 0.7571 |
| Minimum tension | 0.5 | 0.6101 | 2.0877 | 0.7071 | 1.5 | 1.5 | 0.5 | 0.6981 |
| Tension amplitude | 0.6886 | 1.2489 | 0.6777 | 1.1867 | 0 | 0 | 0 | 0.0590 |
Table 12.
Data analyses of average cable-tension amplitude.
Table 12.
Data analyses of average cable-tension amplitude.
| Figure 8 | (a) | (b) | Relationship between (a) and (b) | (e) | Relationship between (a) and (e) |
|---|
| N) | 2.8621 | 3.3609 | < | 2.9582 | < |
| N) | 2.6233 | 2.6373 | < | 3.8497 | < |
| N) | 2.9452 | 3.3137 | < | 4.5 | < |
| N) | 3.1435 | 2.7060 | > | 3.5904 | < |
Table 13.
Data analyses of average cable-tension amplitude.
Table 13.
Data analyses of average cable-tension amplitude.
| Figure 8 | (c) | (d) | Relationship between (c) and (d) | (f) | Relationship between (c) and (f) |
|---|
| N) | 0.9752 | 1.7622 | < | 0.6886 | > |
| N) | 0.8901 | 1.4837 | < | 1.2489 | < |
| N) | 0.9977 | 1.8435 | < | 0.6777 | > |
| N) | 1.0940 | 1.4283 | < | 1.1867 | < |
Remark 5. There are two explanations for a tension amplitude value of zero: (1) the cable-tension value is the lower threshold of cable tension, and the maximum tension is equal to the minimum tension or (2) the cable is broken, and the tension value is zero.
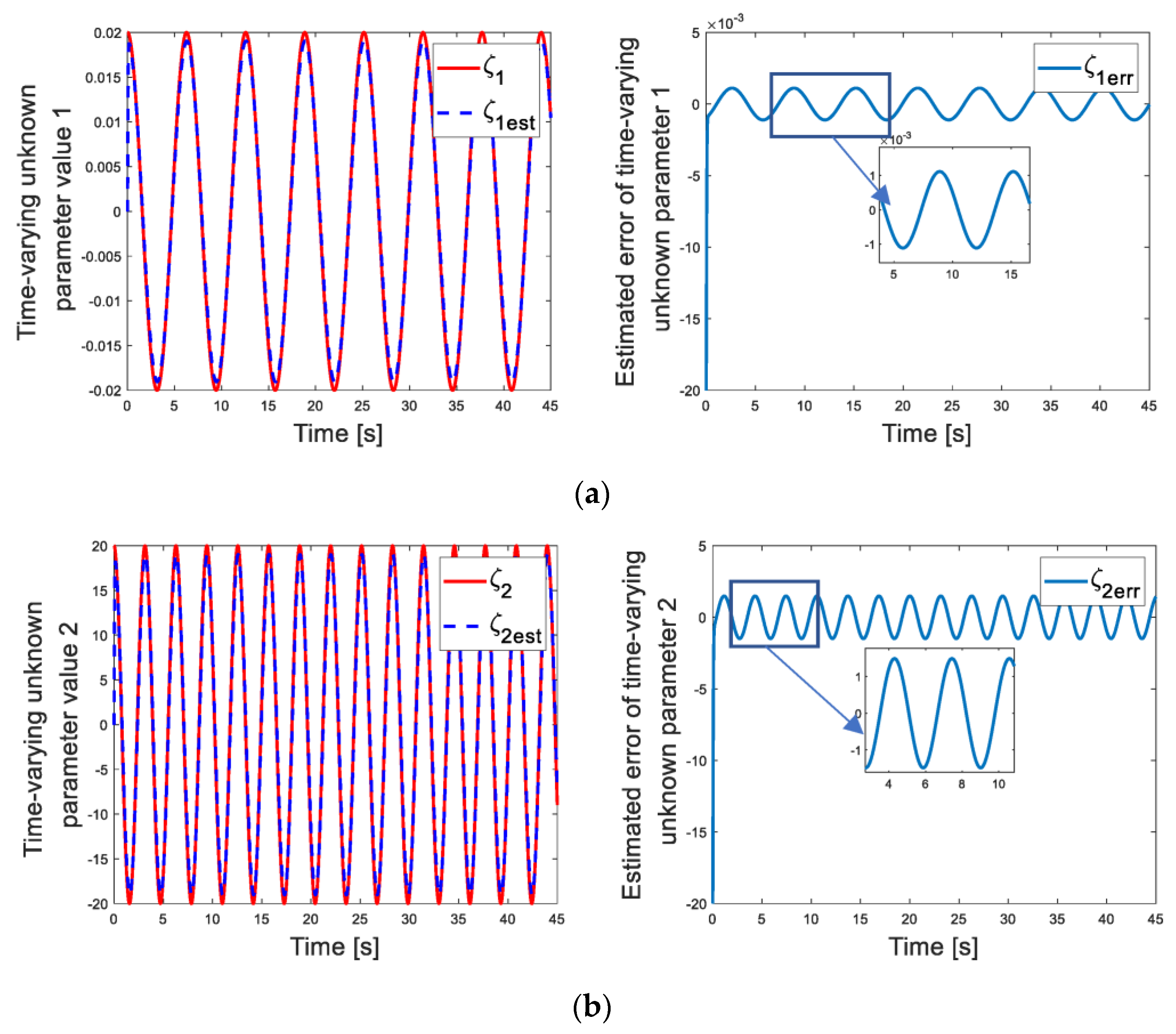
The time−varying unknown parameters, estimated value, and estimated error curves are shown in
Figure 9. When the tracking curve is stable, we can observe that the maximum absolute estimation error and error ratios of the time−varying unknown parameter
are 0.0011 and 5.5%, respectively. The maximum absolute estimation error and error ratios of the time−varying unknown parameter
are 1.4888 and 7.44%. We can find that the control system with the DMPC method has higher estimation accuracy for time−varying unknown parameters
and
. According to Equation (38),
and
are functions of
and
. Therefore, the X−swapping method effectively realizes the linearization and estimation of nonlinear uncertain parameters. Considering that there are far more nonlinear systems than linear systems in the virtual environment, the X−swapping method effectively expands the application range of the linear-mode predictive control method, avoids the complexity of the nonlinear-mode predictive control method, and reduces the amount of calculation.
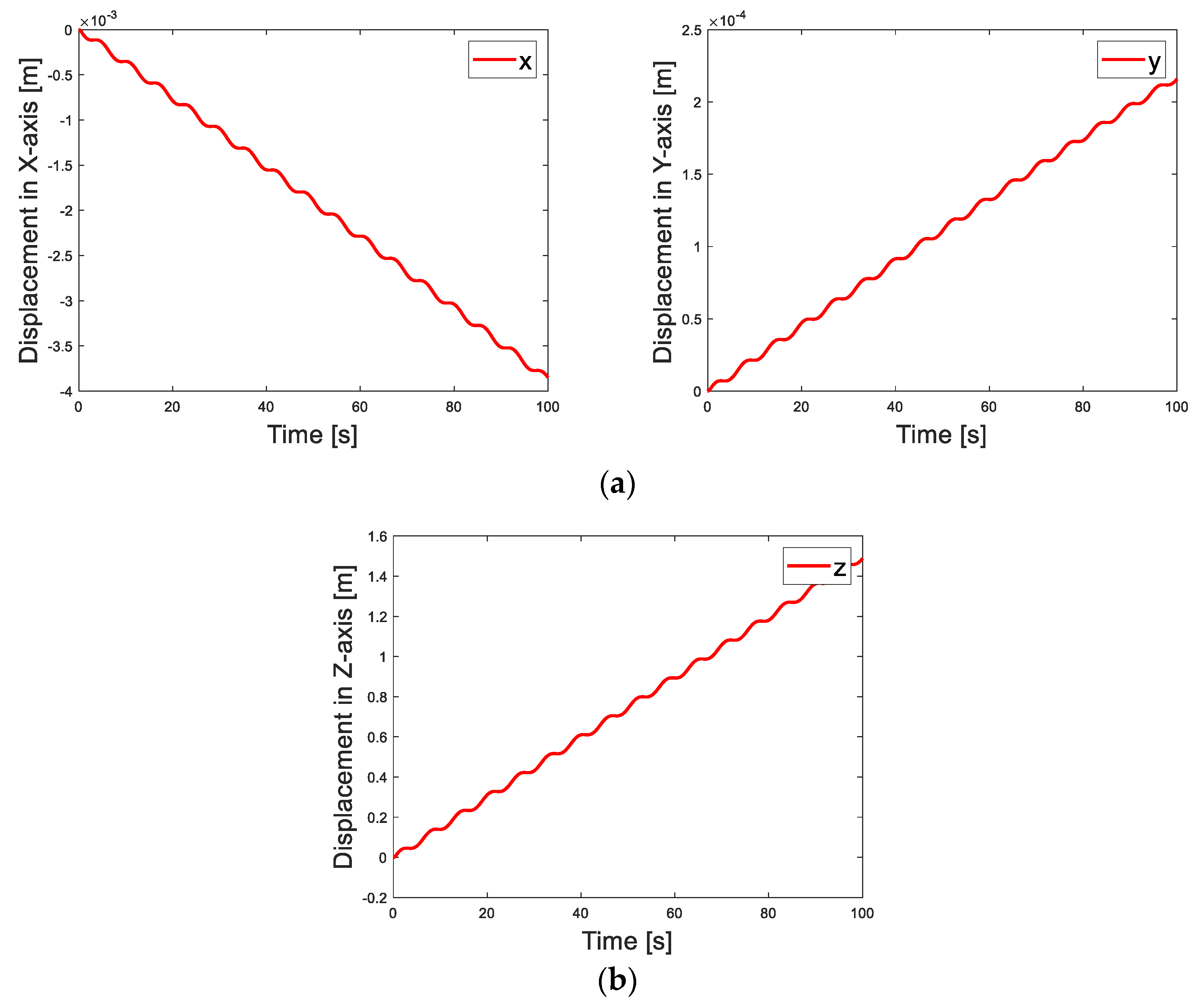
Figure 10 expresses the displacement of CDPM in the
,
, and
-axis directions, respectively. It is easy to find that the displacement value of CDPM in the horizontal (
m and
m) direction is far less than the vertical displacement (1.45 m) of CDPM. Compared to the working depth (60 m) and vertical displacement (1.45 m) of CDPM, the horizontal displacements are so small that the impact on the angle between cables and CDPM is ignored. Therefore, we can conclude that the improved LMPC method with dynamic minimum tension control can effectively avoid the impact of horizontal impact force and suppress the horizontal displacement of CDPM.
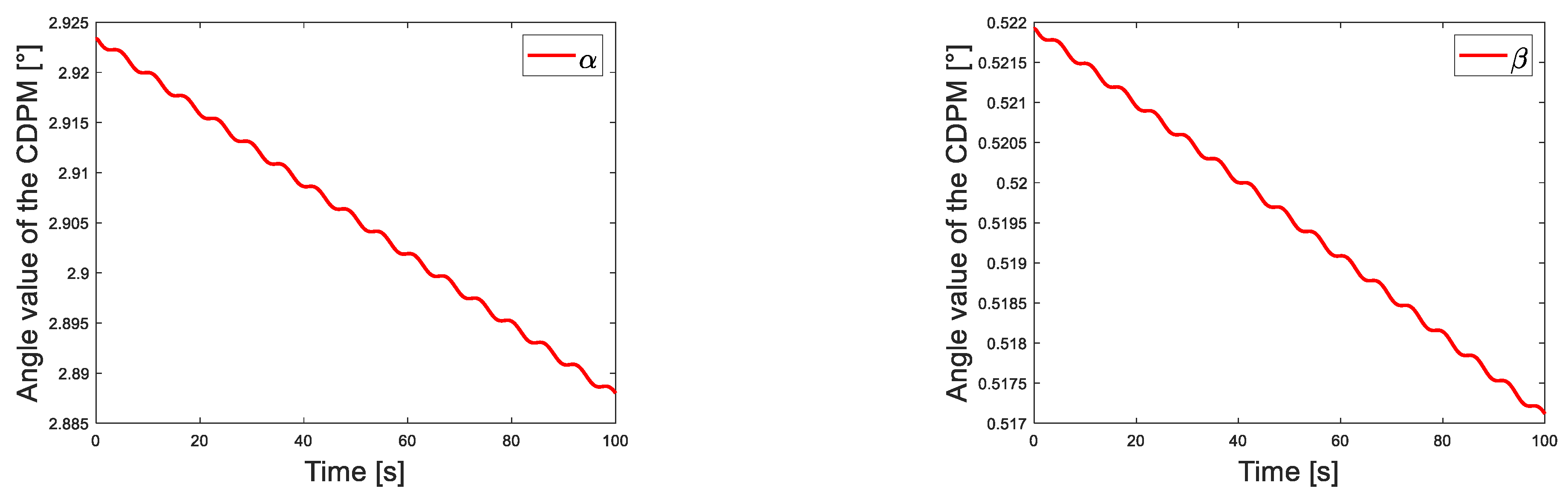
As shown in
Figure 11, the angle value of CDPM is
and
during the simulation, which meets the requirement (
). Furthermore, combined with the amplitude and duration of motion in
Figure 10b, we can observe that CDPM maintains a slow and stable horizontal stabilization trend, and the angle change values are
and
. Based on the trend changes in platform attitude angles, as the platform continues to descend, its original attitude will slowly but continuously adjust to a horizontal state. The platform’s attitude meets the control requirements and constantly improves throughout the moving process. This phenomenon proves the effectiveness of the synchronization control strategy and improved LMPC method used in this paper.
Four primary sources of parameters that affect the CDPM’s motion are mentioned in this article: , , and in DMPC and in the LMPC design; control parameters of the X−swapping method; and winch control. The previous text introduced the reasons for selecting control parameters except for and . The following is the impact of the value of and on the control system.
According to [
19], the control effect of the LMPC method is affected by the value of
and
in Equation (29). There are six simulation experiments, and the experiment results are shown in
Figure 12 and
Table 14 and
Table 15. Due to the same symbolic meaning as in [
35], the values of
and
are selected based on this reference, and continuous adjustments and attempts are made based on simulation. According to the figures and tables, we can find that when
and
, the maximum tracking error is minor in a series of experiments. So, the larger
and the smaller
will lead to smaller tracking error values when
and
are chosen within a specific range, while experiments determine the range.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













