

Maritime Anomaly Detection for Vessel Traffic Services: A Survey


Abstract
1. Introduction
2. Related Work
3. Situation Awareness in Vessel Traffic Services
3.1. Tasks and Services
- 1.
- “providing timely and relevant information on factors that may influence ship movements and assist onboard decision-making”;
- 2.
- “monitoring and managing ship traffic to ensure the safety and efficiency of ship movements”;
- 3.
- “responding to developing unsafe situations”.
- 1.
- Information Service (INS);
- 2.
- Traffic Organisation Service;
- 3.
- Navigation Assistance Service.
3.2. Technologies and Their Operations
3.3. Decision Support
3.4. Anomaly Types and Detection Techniques
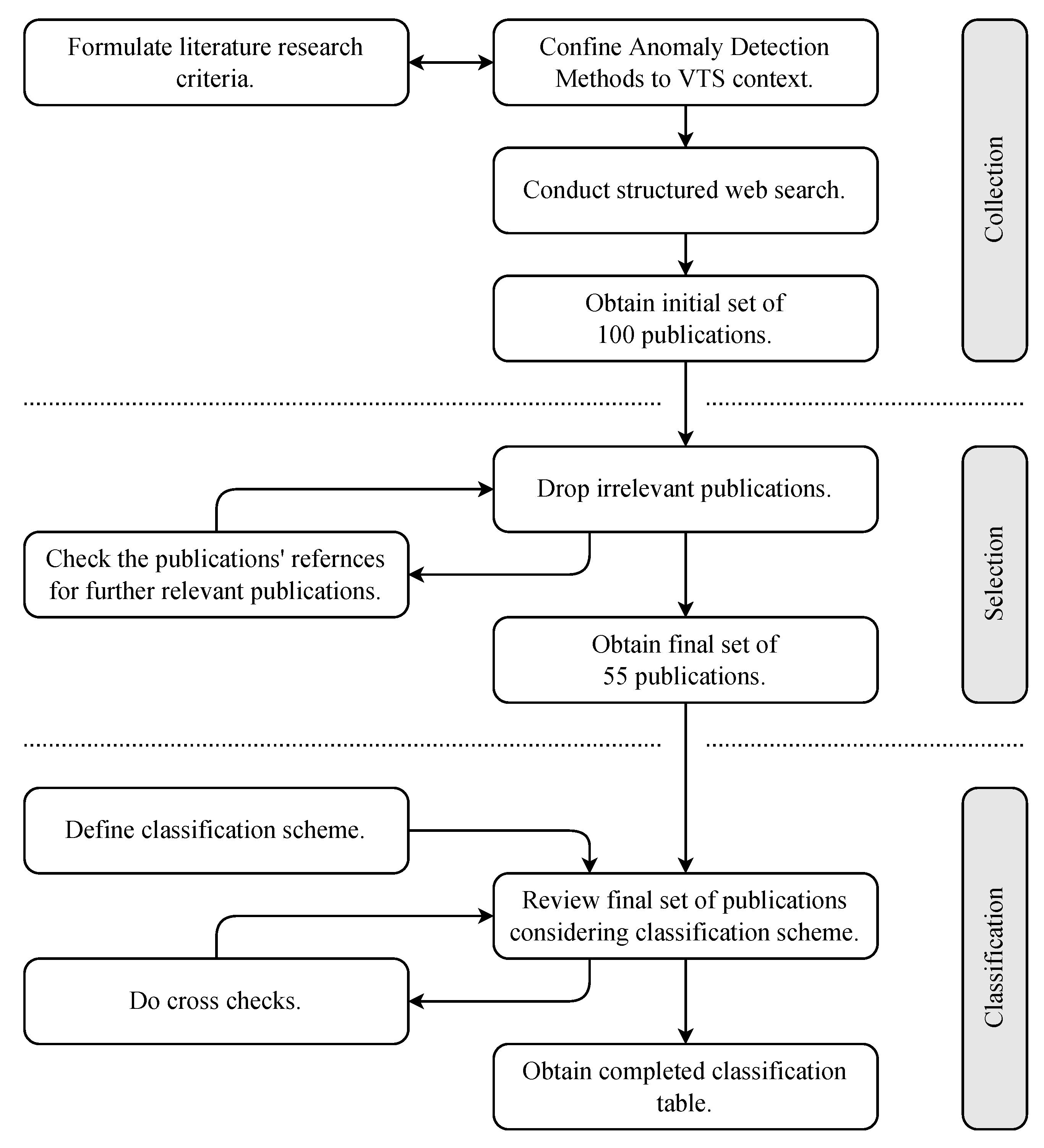
4. Literature Review
4.1. Collection
- maritime;
- (surveillance OR VTS OR monitoring);
- anomaly detection.
4.2. Selection
4.3. Classification
5. Results
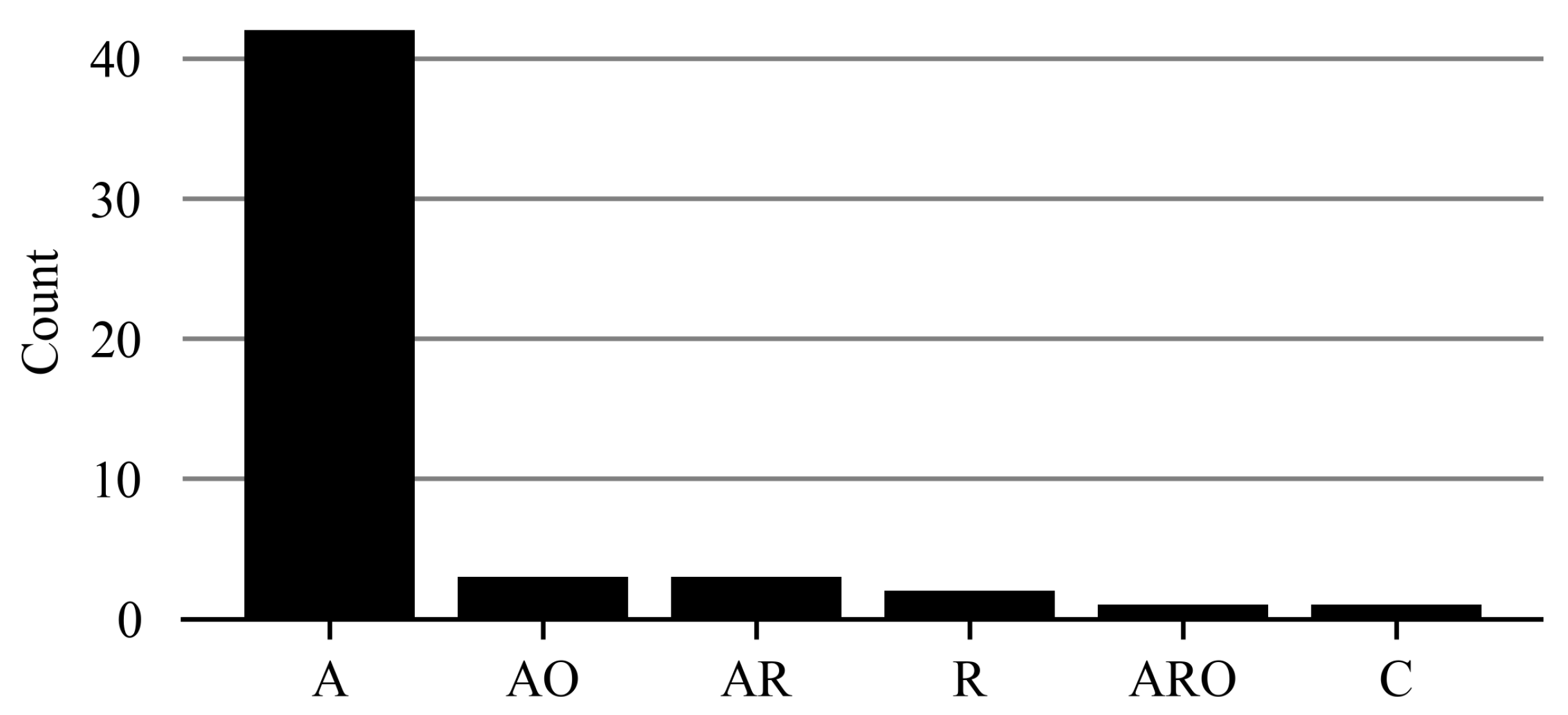
5.1. Data Sources
5.2. Anomaly Types
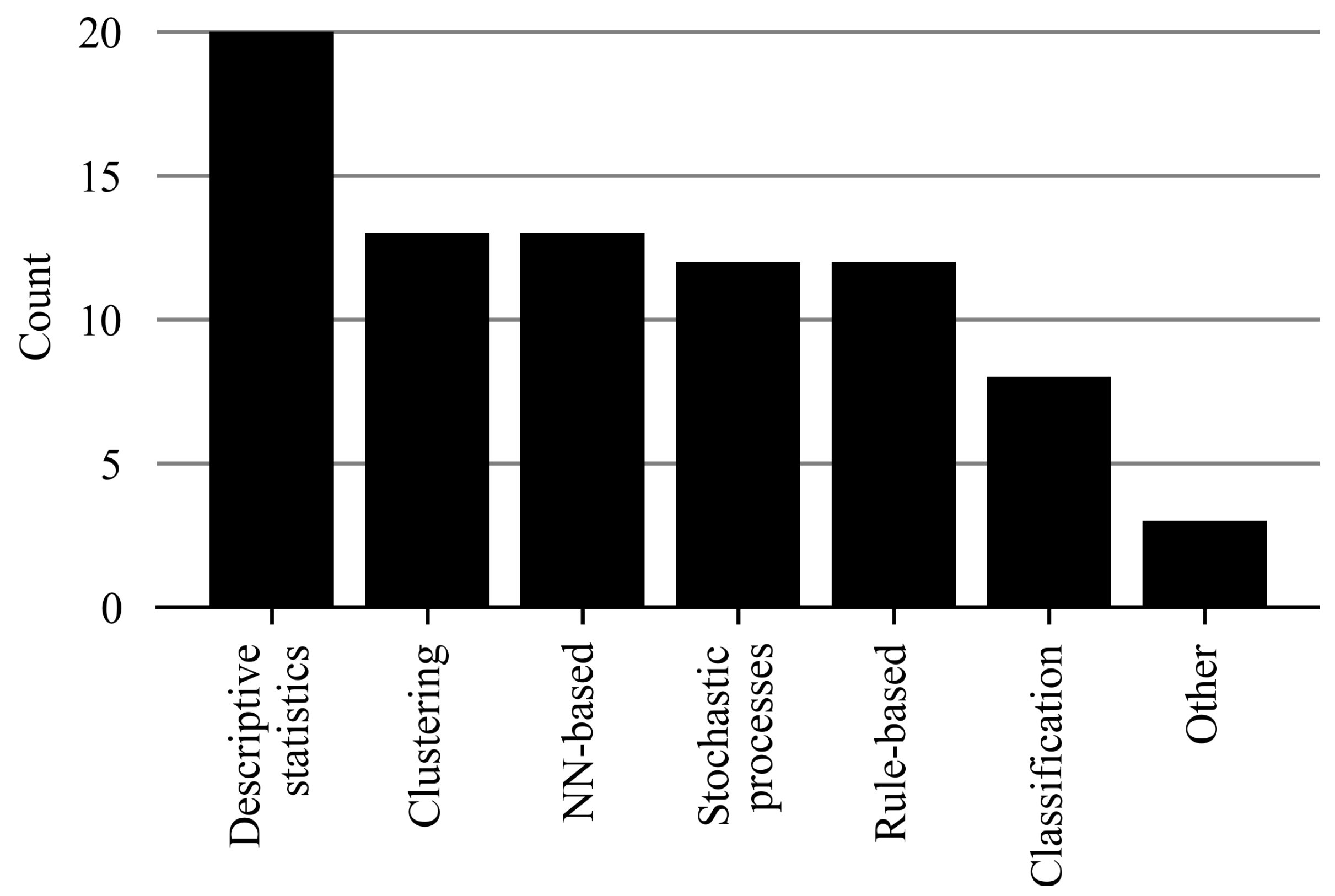
5.3. Anomaly-Detection Techniques
6. Conclusions
- The primary data source used as a base for anomaly detection is AIS. The widespread application of this data source can be explained by its ubiquity, standardized structure and sufficient coverage of relevant maritime traffic information. Only few approaches utilize other data sources. However, despite the contextual information, VHF has not been used in any approach.
- The served anomaly scenarios can be grouped into five generic anomaly types. Most approaches aim at detecting either route or kinematic deviations, or information consistency. However, the precisely served anomaly scenario can be very specific and, for example, cover detection of intentional AIS switch-off, unusual ship visits or a ship being steered under the influence of alcohol.
- The underlying detection techniques are manifold and can range from rather simple and transparent approaches such as measures from descriptive statistics or rule-based systems to more complex and intransparent approaches, e.g., based on NN. The applied detection techniques are connected to the aimed anomaly detection type. For example, approaches for the detection of implausible kinematic or route deviation are often based on measures from descriptive statistics.
7. Discussion
- 1.
- Transparency of and trust in DST decision-making;
- 2.
- Real-time capabilities;
- 3.
- Scattered national solutions;
- 4.
- Geographical scalability of approaches and training data sets.
- 1.
- Integration of VHF data into DST to bridge the missing data gap;
- 2.
- Generation and availability of annotated and approved training data to bridge the training and testing gap;
- 3.
- System integration of realistic test beds for operators under operational conditions to bridge the human–machine trust gap.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AIS | Automatic identification system |
| COLREGs | Convention on the International Regulations for Preventing Collisions at Sea |
| DBSCAN | Density-based spatial clustering of applications with noise |
| DST | Decision support tool |
| IALA | International Association of Marine Aids to Navigation and Lighthouse Authorities |
| IMO | International Maritime Organization |
| INS | Information Service |
| kNN | k-nearest neighbours |
| LSTM | Long short-term memory |
| ML | Machine learning |
| NN | Neural network |
| RNN | Recurrent neural network |
| RSSI | Received signal strength indicator |
| SMCP | Standard marine communication phrases |
| SVM | Support vector machine |
| VHF | Very high frequency |
| VTS | Vessel traffic service |
References
- Wan, Z.; Chen, J.; Makhloufi, A.E.; Sperling, D.; Chen, Y. Four Routes to Better Maritime Governance. Nature 2016, 540, 27–29. [Google Scholar] [CrossRef] [PubMed]
- Burmeister, H.C. Ensuring Navigational Safety and Mitigate Maritime Traffic Risks While Designing Port Approaches and Ship Maneuvering Areas. In Handbook of Terminal Planning; Böse, J.W., Ed.; Springer International Publishing: Cham, Switzerland, 2020; pp. 269–286. [Google Scholar] [CrossRef]
- VTS Manual; Technical report; International Association of Marine Aids to Navigation and Lighthouse Authorities: Saint-Germain-en-Laye, France, 2021.
- Resolution A.1158(32), Guidelines for Vessel Traffic Services; Technical report; International Maritime Organization: London, UK, 2021.
- G1110 Use of Decision Support Tools for VTS Personnel; Technical report; International Association of Marine Aids to Navigation and Lighthouse Authorities: Saint-Germain-en-Laye, France, 2022.
- Chandola, V.; Banerjee, A.; Kumar, V. Anomaly Detection: A Survey. ACM Comput. Surv. 2009, 41, 15:1–15:58. [Google Scholar] [CrossRef]
- Riveiro, M.; Pallotta, G.; Vespe, M. Maritime Anomaly Detection: A Review. Wiley Interdiscip. Rev. Data Min. Knowl. Discov. 2018, 8, e1266. [Google Scholar] [CrossRef]
- G1141 Operational Procedure for Delivering VTS; Technical report; International Association of Marine Aids to Navigation and Lighthouse Authorities: Saint-Germain-en-Laye, France, 2022.
- Sidibé, A.; Shu, G. Study of Automatic Anomalous Behaviour Detection Techniques for Maritime Vessels. J. Navig. 2017, 70, 847–858. [Google Scholar] [CrossRef]
- Tu, E.; Zhang, G.; Rachmawati, L.; Rajabally, E.; Huang, G.B. Exploiting AIS Data for Intelligent Maritime Navigation: A Comprehensive Survey from Data to Methodology. IEEE Trans. Intell. Transp. Syst. 2017, 19, 1559–1582. [Google Scholar] [CrossRef]
- Yan, R.; Wang, S. Study of Data-Driven Methods for Vessel Anomaly Detection Based on AIS Data. In Smart Transportation Systems 2019; Springer: Singapore, 2019; pp. 29–37. [Google Scholar] [CrossRef]
- May Petry, L.; Soares, A.; Bogorny, V.; Brandoli, B.; Matwin, S. Challenges in Vessel Behavior and Anomaly Detection: From Classical Machine Learning to Deep Learning. In Advances in Artificial Intelligence, Proceedings of the 33rd Canadian Conference on Artificial Intelligence, Canadian AI 2020, Ottawa, ON, Canada, 13–15 May 2020; Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer International Publishing: Cham, Switzerland; pp. 401–407. [CrossRef]
- Dogancay, K.; Tu, Z.; Ibal, G. Research into Vessel Behaviour Pattern Recognition in the Maritime Domain: Past, Present and Future. Digit. Signal Process. 2021, 119, 103191. [Google Scholar] [CrossRef]
- Wolsing, K.; Roepert, L.; Bauer, J.; Wehrle, K. Anomaly Detection in Maritime AIS Tracks: A Review of Recent Approaches. J. Mar. Sci. Eng. 2022, 10, 112. [Google Scholar] [CrossRef]
- Vessel Traffic Services. Available online: https://www.imo.org/en/OurWork/Safety/Pages/VesselTrafficServices.aspx (accessed on 1 June 2023).
- G1089 Provision of a VTS; Technical report; International Association of Marine Aids to Navigation and Lighthouse Authorities: Saint-Germain-en-Laye, France, 2022.
- G1111 Preparation of Operational and Technical Performance Requirements for VTS Systems; Technical report; International Association of Marine Aids to Navigation and Lighthouse Authorities: Saint-Germain-en-Laye, France, 2022.
- Skolnik, M.I. Introduction to Radar Systems, 3rd ed.; McGraw-Hill Electrical Engineering Series; McGraw Hill: Boston, MA, USA; Burr Ridge, IL, USA; Dubuque, IA, USA, 2001. [Google Scholar]
- Resolution MSC.74(69), Adoption of New and Amended Performance Standards; Technical report; International Maritime Organization: London, UK, 1998.
- Lane, R.O.; Nevell, D.A.; Hayward, S.D.; Beaney, T.W. Maritime Anomaly Detection and Threat Assessment. In Proceedings of the 2010 13th International Conference on Information Fusion, Edinburgh, UK, 26–29 July 2010; pp. 1–8. [Google Scholar] [CrossRef]
- van Laere, J.; Nilsson, M. Evaluation of a Workshop to Capture Knowledge from Subject Matter Experts in Maritime Surveillance. In Proceedings of the 2009 12th International Conference on Information Fusion, Seattle, WA, USA, 6–9 July 2009; pp. 171–178. [Google Scholar]
- d’Afflisio, E. Maritime Anomaly Detection Based on Statistical Methodologies: Theory and Applications. Ph.D. Thesis, Università degli Studi di Firenze, Florence, Italy, 2022. [Google Scholar]
- Russell, S.; Norvig, P. Artificial Intelligence, A Modern Approach, 4th ed.; Pearson series in artificial intelligence; Pearson: Hoboken, NJ, USA, 2021. [Google Scholar]
- Alzubaidi, L.; Zhang, J.; Humaidi, A.J.; Al-Dujaili, A.; Duan, Y.; Al-Shamma, O.; Santamaría, J.; Fadhel, M.A.; Al-Amidie, M.; Farhan, L. Review of Deep Learning: Concepts, CNN Architectures, Challenges, Applications, Future Directions. J. Big Data 2021, 8, 53. [Google Scholar] [CrossRef]
- Abreu, F.H.O.; Soares, A.; Paulovich, F.V.; Matwin, S. A Trajectory Scoring Tool for Local Anomaly Detection in Maritime Traffic Using Visual Analytics. ISPRS Int. J. Geoinf. 2021, 10, 412. [Google Scholar] [CrossRef]
- Abreu, F.H.; Soares, A.; Paulovich, F.V.; Matwin, S. Local Anomaly Detection in Maritime Traffic Using Visual Analytics. In Proceedings of the CEUR Workshop Proceedings, Nicosia, Cyprus, 23–26 March 2021; Volume 2841. [Google Scholar]
- Cai, C.; Chen, R.; Liu, A.D.; Roberts, F.S.; Xie, M. iGroup Learning and iDetect for Dynamic Anomaly Detection with Applications in Maritime Threat Detection. In Proceedings of the 2018 IEEE International Symposium on Technologies for Homeland Security (HST), Woburn, MA, USA, 23–24 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–6. [Google Scholar]
- Chatzikokolakis, K.; Zissis, D.; Vodas, M.; Tsapelas, G.; Mouzakitis, S.; Kokkinakos, P.; Askounis, D. BigDataOcean Project: Early Anomaly Detection from Big Maritime Vessel Traffic Data. In Proceedings of the 18th International Conference on Computer and IT Applications in the Maritime Industries, Tullamore, Ireland, 25–27 March 2019. [Google Scholar]
- Chen, S.; Huang, Y.; Lu, W. Anomaly Detection and Restoration for AIS Raw Data. Wirel. Commun. Mob. Comput. 2022, 2022, 5954483. [Google Scholar] [CrossRef]
- Daranda, A.; Dzemyda, G. Navigation Decision Support: Discover of Vessel Traffic Anomaly According to the Historic Marine Data. Int. J. Comput. Commun. Control 2020, 15, 1–9. [Google Scholar] [CrossRef]
- Eljabu, L.; Etemad, M.; Matwin, S. Anomaly Detection in Maritime Domain Based on Spatio-Temporal Analysis of AIS Data Using Graph Neural Networks. In Proceedings of the 2021 5th International Conference on Vision, Image and Signal Processing (ICVISP), Kuala Lumpur, Malaysia, 18–20 December 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 142–147. [Google Scholar] [CrossRef]
- Filipiak, D.; Stróżyna, M.; Krzysztof, W. Anomaly Detection in the Maritime Domain: Comparison of Traditional and Big Data Approach. In Proceedings of the NATO IST-160-RSM Specialists’ Meeting on Big Data & Artificial Intelligence for Military Decision Making, Bordeaux, France, 30 May–1 June 2018; pp. 1–13. [Google Scholar] [CrossRef]
- Filipiak, D.; Stróżyna, M.; Węcel, K.; Abramowicz, W. Big Data for Anomaly Detection in Maritime Surveillance: Spatial AIS Data Analysis for Tankers. Marit. Tech. J. 2019, 215, 5–28. [Google Scholar] [CrossRef]
- Ford, J.H.; Peel, D.; Kroodsma, D.; Hardesty, B.D.; Rosebrock, U.; Wilcox, C. Detecting Suspicious Activities at Sea Based on Anomalies in Automatic Identification Systems Transmissions. PLoS ONE 2018, 13, e0201640. [Google Scholar] [CrossRef] [PubMed]
- Forti, N.; Millefiori, L.M.; Braca, P. Hybrid Bernoulli Filtering for Detection and Tracking of Anomalous Path Deviations. In Proceedings of the 2018 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018; pp. 1178–1184. [Google Scholar] [CrossRef]
- Forti, N.; Millefiori, L.M.; Braca, P. Unsupervised Extraction of Maritime Patterns of Life from Automatic Identification System Data. In Proceedings of the OCEANS 2019-Marseille, Marseille, France, 17–20 June 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Forti, N.; Millefiori, L.M.; Braca, P.; Willett, P. Random Finite Set Tracking for Anomaly Detection in the Presence of Clutter. In Proceedings of the IEEE National Radar Conference - Proceedings, Florence, Italy, 21–25 September 2020; Volume 2020. [Google Scholar] [CrossRef]
- Forti, N.; d’Afflisio, E.; Braca, P.; Millefiori, L.M.; Willett, P.; Carniel, S. Maritime Anomaly Detection in a Real-World Scenario: Ever Given Grounding in the Suez Canal. IEEE Trans. Intell. Transp. Syst. 2021, 23, 13904–13910. [Google Scholar] [CrossRef]
- Forti, N.; Millefiori, L.M.; Braca, P.; Willett, P. Bayesian Filtering for Dynamic Anomaly Detection and Tracking. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 1528–1544. [Google Scholar] [CrossRef]
- Fu, P.; Wang, H.; Liu, K.; Hu, X.; Zhang, H. Finding Abnormal Vessel Trajectories Using Feature Learning. IEEE Access 2017, 5, 7898–7909. [Google Scholar] [CrossRef]
- Goodarzi, M.; Shaabani, M. Maritime Traffic Anomaly Detection from Spatio-temporal AIS Data. In Proceedings of the Second International Management Conference and Fuzzy Systems; 2019; pp. 1–8. [Google Scholar]
- Guo, S.; Mou, J.; Chen, L.; Chen, P. An Anomaly Detection Method for AIS Trajectory Based on Kinematic Interpolation. J. Mar. Sci. Eng. 2021, 9, 609. [Google Scholar] [CrossRef]
- Han, X.; Armenakis, C.; Jadidi, M. DBscan Optimization for Improving Marine Trajectory Clustering and Anomaly Detection. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 43, 455–461. [Google Scholar] [CrossRef]
- Hu, J.; Kaur, K.; Lin, H.; Wang, X.; Hassan, M.M.; Razzak, I.; Hammoudeh, M. Intelligent Anomaly Detection of Trajectories for IoT Empowered Maritime Transportation Systems. IEEE Trans. Intell. Transp. Syst. 2022, 24, 2382–2391. [Google Scholar] [CrossRef]
- Karataş, G.B.; Karagoz, P.; Ayran, O. Trajectory Pattern Extraction and Anomaly Detection for Maritime Vessels. IEEE Internet Things J. 2021, 16, 100436. [Google Scholar] [CrossRef]
- Keane, K.R. Detecting Motion Anomalies. In Proceedings of the 8th ACM SIGSPATIALWorkshop on GeoStreaming, IWGS’17, Redondo Beach, CA, USA, 7–10 November 2017; Association for Computing Machinery: New York, NY, USA, 2017; pp. 21–28. [Google Scholar] [CrossRef]
- Kontopoulos, I.; Chatzikokolakis, K.; Zissis, D.; Tserpes, K.; Spiliopoulos, G. Real-Time Maritime Anomaly Detection: Detecting Intentional AIS Switch-Off. IJBDI 2020, 7, 85. [Google Scholar] [CrossRef]
- Kontopoulos, I.; Varlamis, I.; Tserpes, K. Uncovering Hidden Concepts from AIS Data: A Network Abstraction of Maritime Traffic for Anomaly Detection. In Multiple-Aspect Analysis of Semantic Trajectories: First International Workshop, MASTER 2019, Held in Conjunction with ECML-PKDD 2019, Würzburg, Germany, 16 September 2019; Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer International Publishing: Cham, Switzerland, 2020; Volume 11889. [Google Scholar] [CrossRef]
- Krüger, M. Detection of AIS Spoofing in Fishery Scenarios. In Proceedings of the 2019 22th International Conference on Information Fusion (FUSION), Ottawa, ON, Canada, 2–5 July 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Nguyen, D.; Vadaine, R.; Hajduch, G.; Garello, R.; Fablet, R. Multi-Task Learning for Maritime Traffic Surveillance from AIS Data Streams. In Proceedings of the IEEE 5th International Conference on Data Science and Advanced Analytics (DSAA), Turin, Italy, 1–3 October 2018; pp. 1–3. [Google Scholar]
- Nguyen, D.; Vadaine, R.; Hajduch, G.; Garello, R.; Fablet, R. A Multi-Task Deep Learning Architecture for Maritime Surveillance Using AIS Data Streams. In Proceedings of the 2018 IEEE 5th International Conference on Data Science and Advanced Analytics, DSAA 2018, Turin, Italy, 1–4 October 2018; pp. 331–340. [Google Scholar] [CrossRef]
- Nguyen, D.; Simonin, M.; Hajduch, G.; Vadaine, R.; Tedeschi, C.; Fablet, R. Detection of Abnormal Vessel Behaviours from AIS Data Using GeoTrackNet: From the Laboratory to the Ocean. arXiv 2020. [Google Scholar] [CrossRef]
- Nguyen, D.; Vadaine, R.; Hajduch, G.; Garello, R.; Fablet, R. GeoTrackNet–A Maritime Anomaly Detector Using Probabilistic Neural Network Representation of AIS Tracks and A Contrario Detection. IEEE Trans. Intell. Transp. Syst. 2021, 23, 5655–5667. [Google Scholar] [CrossRef]
- Patroumpas, K.; Alevizos, E.; Artikis, A.; Vodas, M.; Pelekis, N.; Theodoridis, Y. Online Event Recognition from Moving Vessel Trajectories. GeoInformatica 2017, 21, 389–427. [Google Scholar] [CrossRef]
- Roberts, S.A. A Shape-Based Local Spatial Association Measure (LISShA): A Case Study in Maritime Anomaly Detection. Geogr. Anal. 2019, 51, 403–425. [Google Scholar] [CrossRef]
- Rong, H.; Teixeira, A.; Guedes Soares, C. Data Mining Approach to Shipping Route Characterization and Anomaly Detection Based on AIS Data. Ocean Eng. 2020, 198, 106936. [Google Scholar] [CrossRef]
- Singh, S.K.; Heymann, F. On the Effectiveness of AI-Assisted Anomaly Detection Methods in Maritime Navigation. In Proceedings of the 2020 IEEE 23rd International Conference on Information Fusion (FUSION), Rustenburg, South Africa, 6–9 July 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Singh, S.K.; Heymann, F. Machine Learning-Assisted Anomaly Detection in Maritime Navigation Using AIS Data. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 832–838. [Google Scholar] [CrossRef]
- Tyasayumranani, W.; Hwang, T.; Hwang, T.; Youn, I.H. Anomaly Detection Model of Small-Scaled Ship for Maritime Autonomous Surface Ships’ Operation. J. Int. Marit. Saf. Environ. Aff. Shipp. 2022, 6, 224–235. [Google Scholar] [CrossRef]
- Wang, F.; Lei, Y.; Liu, Z.; Wang, X.; Ji, S.; Tung, A.K. Fast and Parameter-Light Rare Behavior Detection in Maritime Trajectories. Inf. Process. Manag. 2020, 57, 102268. [Google Scholar] [CrossRef]
- Wang, Y. Application of Neural Network in Abnormal AIS Data Identification. In Proceedings of the 2020 IEEE International Conference on Artificial Intelligence and Computer Applications (ICAICA), Dalian, China, 27–29 June 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 173–179. [Google Scholar] [CrossRef]
- Xia, Z.; Gao, S. Analysis of Vessel Anomalous Behavior Based on Bayesian Recurrent Neural Network. In Proceedings of the 2020 IEEE 5th International Conference on Cloud Computing and Big Data Analytics (ICCCBDA), Chengdu, China, 10–13 April 2020; pp. 393–397. [Google Scholar] [CrossRef]
- Yan, Z.; Song, X.; Zhong, H.; Yang, L.; Wang, Y. Ship Classification and Anomaly Detection Based on Spaceborne AIS Data Considering Behavior Characteristics. Sensors 2022, 22, 7713. [Google Scholar] [CrossRef]
- Zhao, L.; Shi, G. Maritime Anomaly Detection Using Density-based Clustering and Recurrent Neural Network. J. Navig. 2019, 72, 894–916. [Google Scholar] [CrossRef]
- Zhen, R.; Jin, Y.; Hu, Q.; Shao, Z.; Nikitakos, N. Maritime Anomaly Detection within Coastal Waters Based on Vessel Trajectory Clustering and Naïve Bayes Classifier. J. Navig. 2017, 70, 648–670. [Google Scholar] [CrossRef]
- Zhou, Y.; Wright, J.; Maskell, S. A Generic Anomaly Detection Approach Applied to Mixture-of-unigrams and Maritime Surveillance Data. In Proceedings of the 2019 Symposium on Sensor Data Fusion: Trends, Solutions, Applications, SDF 2019, Bonn, Germany, 15–17 October 2019. [Google Scholar] [CrossRef]
- Zissis, D.; Chatzikokolakis, K.; Spiliopoulos, G.; Vodas, M. A Distributed Spatial Method for Modeling Maritime Routes. IEEE Access 2020, 8, 47556–47568. [Google Scholar] [CrossRef]
- Zor, C.; Kittler, J. Maritime Anomaly Detection in Ferry Tracks. In Proceedings of the 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017; pp. 2647–2651. [Google Scholar] [CrossRef]
- Coleman, J.; Kandah, F.; Huber, B. Behavioral Model Anomaly Detection in Automatic Identification Systems (AIS). In Proceedings of the 2020 10th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 6–8 January 2020; pp. 0481–0487. [Google Scholar] [CrossRef]
- Mazzarella, F.; Vespe, M.; Alessandrini, A.; Tarchi, D.; Aulicino, G.; Vollero, A. A Novel Anomaly Detection Approach to Identify Intentional AIS On-off Switching. Expert Syst. Appl. 2017, 78, 110–123. [Google Scholar] [CrossRef]
- Ray, C. Data Variety and Integrity Assessment for Maritime Anomaly Detection. In Proceedings of the International Conference on Big Data and Cyber-Security Intelligence, Las Vegas, NV, USA, 12–14 December 2018. [Google Scholar]
- Thomopoulos, S.C.A.; Rizogannis, C.; Thanos, K.G.; Dimitros, K.; Panou, K.; Zacharakis, D. OCULUS Sea™ Forensics: An Anomaly Detection Toolbox for Maritime Surveillance. In Lecture Notes in Business Information Processing; Springer: Cham, Switzerland, 2019; Volume 373, pp. 485–495. [Google Scholar] [CrossRef]
- d’Afflisio, E.; Braca, P.; Millefiori, L.M.; Willett, P. Detecting Anomalous Deviations from Standard Maritime Routes Using the Ornstein–Uhlenbeck Process. IEEE Trans. Signal Process. 2018, 66, 6474–6487. [Google Scholar] [CrossRef]
- d’Afflisio, E.; Braca, P.; Millefiori, L.M.; Willett, P. Maritime Anomaly Detection Based on Mean-Reverting Stochastic Processes Applied to a Real-World Scenario. In Proceedings of the 2018 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1171–1177. [Google Scholar] [CrossRef]
- d’Afflisio, E.; Braca, P.; Willett, P. Malicious AIS Spoofing and Abnormal Stealth Deviations: A Comprehensive Statistical Framework for Maritime Anomaly Detection. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2093–2108. [Google Scholar] [CrossRef]
- d’Afflisio, E.; Braca, P.; Chisci, L.; Battistelli, G.; Willett, P. Maritime Anomaly Detection of Malicious Data Spoofing and Stealth Deviations from Nominal Route Exploiting Heterogeneous Sources of Information. In Proceedings of the 2021 IEEE 24th International Conference on Information Fusion (FUSION), Sun City, South Africa, 1–4 November 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Bauw, M.; Velasco-Forero, S.; Angulo, J.; Adnet, C.; Airiau, O. From Unsupervised to Semi-Supervised Anomaly Detection Methods for HRRP Targets. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar]
- Van Loi, N.; Kien, T.T.; Hop, T.V.; Van Khuong, N. Abnormal Moving Speed Detection Using Combination of Kernel Density Estimator and DBSCAN for Coastal Surveillance Radars. In Proceedings of the 2020 7th International Conference on Signal Processing and Integrated Networks (SPIN), Noida, India, 27–28 February 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 143–147. [Google Scholar] [CrossRef]
- Fahn, C.; Ling, J.; Yeh, M.; Huang, P.; Wu, M. Abnormal Maritime Activity Detection in Satellite Image Sequences Using Trajectory Features. IJFCC 2019, 8, 29–33. [Google Scholar] [CrossRef]
- Czaplewski, B.; Dzwonkowski, M. A Novel Approach Exploiting Properties of Convolutional Neural Networks for Vessel Movement Anomaly Detection and Classification. ISA Trans. 2022, 119, 1–16. [Google Scholar] [CrossRef]
- Gözalan, A.; John, O.; Lübcke, T.; Maier, A.; Reimann, M.; Richter, J.G.; Zverev, I. Assisting Maritime Search and Rescue (SAR) Personnel with AI-Based Speech Recognition and Smart Direction Finding. J. Mar. Sci. Eng. 2020, 8, 818. [Google Scholar] [CrossRef]
- Ruff, L.; Vandermeulen, R.A.; Görnitz, N.; Binder, A.; Müller, E.; Müller, K.R.; Kloft, M. Deep Semi-Supervised Anomaly Detection. In Proceedings of the International Conference on Learning Representations, Addis Ababa, Ethiopia, 26–30 April 2020. [Google Scholar] [CrossRef]
- Samek, W.; Müller, K.R. Towards Explainable Artificial Intelligence. In Explainable AI: Interpreting, Explaining and Visualizing Deep Learning; Springer: Cham, Switzerland, 2019; Volume 11700, pp. 5–22. [Google Scholar] [CrossRef]
- Wang, Y.; Chung, S.H. Artificial Intelligence in Safety-Critical Systems: A Systematic Review. Ind. Manag. Data Syst. 2021, 122, 442–470. [Google Scholar] [CrossRef]
- Constapel, M.; Koch, P.; Burmeister, H.C. On the Implementation of a Rule-Based System to Perform Assessment of COLREGs Onboard Maritime Autonomous Surface Ships. J. Phys. Conf. Ser. 2022, 2311, 012033. [Google Scholar] [CrossRef]
- Burmeister, H.C.; Scheidweiler, T.; Reimann, M.; Jahn, C. Assessing Safety Effects of Digitization with the European Maritime Simulator Network EMSN: The Sea Traffic Management Case. TransNav. Int. J. Mar. Navig. Saf. Sea Transp. 2020, 14, 91–96. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technology | Description |
|---|---|
| Radar | A radar system emits electro-magnetive waves and detects the echo signal of reflected waves by targets such as vessels [18]. Direction and distance to the target as well as its motion direction and velocity can be deduced. |
| AIS | AIS is a standardized, automatic communication system which is used over transceivers [17,19]. It is used by vessels, VTS and for (virtual) aids to navigation. Depending on the message type, the message contains static, dynamic and voyage-related information about the sender. |
| Environmental monitoring | Various relevant environmental conditions can be monitored [17]. Common is the measurement and monitoring of hydrological (e.g., height of tide, current speed or ice coverage) and meteorological (e.g., wind speed, wind direction or visibility) conditions. |
| Electro-optical systems | Electro-optical systems refer to imaging devices that can be, for example, daylight or night-vision camera surveillance [17]. Usually, the field of view of the utilized cameras is adjustable. |
| Radio communications | Spoken communication takes place over VHF radio communication systems [17]. VHF is used to enable real-time situation assessment. |
| Radio direction finders | A radio direction-finder device is able to deduce the bearing to a VHF emitting station. The bearing can be associated with an AIS target in the vicinity. |
| Long-range sensors | For situation awareness beyond the operation range of short-range sensors (e.g., radar or AIS), long-range sensors can be applied [17]. Common examples are the so-called long-range identification and tracking system or satellite-based AIS. |
| Anomaly Type | Description |
|---|---|
| Kinematic deviation | Deviation in a single kinematic parameter, e.g., speed over ground or course over ground. |
| Route deviation | Deviation in a route due to deviation in the sequence of positions. |
| Collision risk | Close approach between vessels or vessels and (abstract) objects. Objects can be visible on water (e.g., bouys) as well as regulatoric (e.g., traffic separation schemes as abstract objects) or physical (e.g., shallow water or coastlines) confinements of the waterway. |
| Zone entry | Penetration of regulatorily or physically defined zones. |
| Inconsistency | Information inconsistency in the situation awareness either due to sensors providing contrasting information or one sensor providing false data. |
| Detection Technique | Description |
|---|---|
| Descriptive Statistics | Detection techniques based on descriptive statistics are data-driven. They rely on data sets which are used to derive a statistical distribution to model behaviour patterns [6,22]. Here, normalcy is defined as any pattern that is close to the mean behaviour pattern. An anomalous behaviour pattern would be anything that deviates too far from the mean, thus the term outlier. The degree or threshold of an anomaly is given by the distance from the mean. |
| Stochastic Processes | Behaviour patterns can be described as stochastic processes. In this case, a model is created which is able to describe the change in a pattern (or a state) over time randomly or due to influential conditions. Generally known approaches that fall into this technique are Markov models or models based on Bayesian statistics [22]. |
| Clustering | The technique of clustering comprises approaches for the creation of clusters and which are based on Machine Learning (ML). There exists a variety of clustering algorithms which all serve specific purposes [23]. |
| Classification | Classification can be performed through various approaches. In this review, only ML-based classification approaches are counted as classification approaches. Similarly to clustering, there is a broad variety of classification algorithms [23]. |
| Neural network-based | Neural networks (NN) are universal function approximators and, thus, theoretically can address every problem type. Any NN-based detection approach is considered under this technique [24]. |
| Rule-based | Rule-based systems build upon human-made rules. The other aforementioned techniques rely on sets and interactions of rules, too; however, this technique crucially differs in its simpler technical structure and the intuitive explainability of decision processes [12]. |
| Publication | Technique | Anomaly | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Data Source | Author | Year | Descriptive Statistics | Stochastic Processes | Clustering | Classification | NN-Based | Rule-Based | Other | Route Deviation | Kinematic Deviation | Collision Risk | Zone Entry | Inconsistency | ||
| A | Abreu et al. | 2021 [25,26] | ● | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ● | ○ | ○ | ○ | ||
| Cai et al. | 2018 [27] | ● | ○ | ○ | ○ | ○ | ○ | ○ | ● | ○ | ○ | ○ | ○ | |||
| Chatzikokolakis et al. | 2019 [28] | ○ | ○ | ○ | ○ | ○ | ● | ● | ● | ○ | ● | ○ | ● | |||
| Chen et al. | 2022 [29] | ○ | ○ | ○ | ○ | ○ | ● | ○ | ○ | ○ | ○ | ● | ○ | |||
| Daranda and Dzemyda | 2020 [30] | ○ | ○ | ● | ○ | ○ | ○ | ○ | ● | ○ | ○ | ○ | ○ | |||
| Eljabu et al. | 2021 [31] | ○ | ○ | ○ | ○ | ● | ○ | ○ | ● | ○ | ○ | ○ | ○ | |||
| Filipiak et al. | 2018 [32] 2019 [33] | ● | ○ | ○ | ○ | ○ | ● | ○ | ○ | ● | ○ | ○ | ● | |||
| Ford et al. | 2018 [34] | ● | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ● | |||
| Forti et al. | 2018–2022 [35,36,37,38,39] | ○ | ● | ○ | ○ | ○ | ○ | ○ | ● | ○ | ○ | ○ | ○ | |||
| Fu et al. | 2017 [40] | ○ | ○ | ● | ○ | ○ | ○ | ○ | ● | ● | ○ | ○ | ○ | |||
| Goodarzi and Shaabani | 2019 [41] | ○ | ○ | ● | ○ | ○ | ○ | ○ | ● | ○ | ○ | ○ | ○ | |||
| Guo et al. | 2021 [42] | ○ | ○ | ● | ○ | ○ | ○ | ● | ○ | ● | ○ | ○ | ● | |||
| Han et al. | 2020 [43] | ○ | ○ | ● | ○ | ○ | ○ | ○ | ● | ● | ○ | ○ | ○ | |||
| Hu et al. | 2022 [44] | ○ | ○ | ○ | ○ | ● | ○ | ○ | ○ | ● | ○ | ○ | ○ | |||
| Karatas et al. | 2021 [45] | ○ | ○ | ● | ○ | ● | ○ | ○ | ● | ○ | ○ | ○ | ○ | |||
| Keane | 2017 [46] | ● | ○ | ○ | ○ | ○ | ○ | ○ | ● | ● | ○ | ○ | ○ | |||
| Kontopoulos et al. | 2020 [47] | ○ | ○ | ○ | ○ | ○ | ● | ○ | ○ | ○ | ○ | ○ | ● | |||
| Kontopoulos et al. | 2020 [48] | ● | ○ | ● | ○ | ○ | ○ | ○ | ● | ● | ○ | ○ | ○ | |||
| Krüger | 2019 [49] | ○ | ○ | ○ | ● | ○ | ● | ○ | ○ | ○ | ○ | ○ | ● | |||
| Nguyen et al. | 2018–2021 [50,51,52,53] | ● | ○ | ○ | ○ | ● | ○ | ○ | ● | ● | ○ | ○ | ○ | |||
| Patroumpas et al. | 2017 [54] | ● | ○ | ○ | ○ | ○ | ● | ○ | ○ | ● | ● | ● | ○ | |||
| Roberts | 2019 [55] | ○ | ○ | ● | ○ | ○ | ○ | ○ | ● | ○ | ○ | ○ | ○ | |||
| Rong et al. | 2020 [56] | ● | ○ | ● | ○ | ○ | ○ | ○ | ● | ○ | ○ | ○ | ○ | |||
| Singh and Heymann | 2020 [57] | ○ | ● | ○ | ● | ● | ○ | ○ | ○ | ○ | ○ | ○ | ● | |||
| Singh and Heymann | 2020 [58] | ○ | ○ | ○ | ○ | ● | ○ | ○ | ○ | ○ | ○ | ○ | ● | |||
| Tyasayumranani et al. | 2022 [59] | ● | ○ | ○ | ○ | ○ | ● | ○ | ● | ● | ● | ○ | ○ | |||
| Wang et al. | 2020 [60] | ○ | ○ | ○ | ● | ○ | ○ | ○ | ● | ● | ○ | ○ | ○ | |||
| Wang | 2020 [61] | ○ | ○ | ○ | ○ | ● | ○ | ○ | ○ | ● | ○ | ○ | ● | |||
| Xia and Gao | 2020 [62] | ○ | ○ | ○ | ○ | ● | ○ | ○ | ● | ● | ○ | ○ | ○ | |||
| Yan et al. | 2022 [63] | ● | ○ | ○ | ● | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ● | |||
| Zhao and Shi | 2019 [64] | ○ | ○ | ● | ○ | ● | ○ | ○ | ● | ● | ○ | ○ | ○ | |||
| Zhen et al. | 2017 [65] | ○ | ● | ● | ○ | ○ | ○ | ○ | ● | ○ | ○ | ○ | ○ | |||
| Zhou et al. | 2019 [66] | ● | ○ | ○ | ○ | ○ | ○ | ○ | ● | ○ | ○ | ○ | ● | |||
| Zissis et al. | 2020 [67] | ○ | ○ | ● | ○ | ○ | ● | ● | ● | ● | ○ | ○ | ○ | |||
| Zor and Kittler | 2017 [68] | ○ | ● | ○ | ○ | ○ | ○ | ○ | ● | ● | ○ | ○ | ○ | |||
| Publication | Technique | Anomaly | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Data Source | Author | Year | Descriptive Statistics | Stochastic Processes | Clustering | Classification | NN-Based | Rule-Based | Other | Route Deviation | Kinematic Deviation | Collision Risk | Zone Entry | Inconsistency | ||
| AO | Coleman et al. | 2020 [69] | ○ | ○ | ● | ● | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ● | ||
| Mazzarella et al. | 2017 [70] | ● | ○ | ○ | ● | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ● | |||
| Ray | 2018 [71] | ○ | ○ | ○ | ○ | ○ | ● | ○ | ○ | ○ | ○ | ○ | ● | |||
| ARO | Thomopoulos et al. | 2019 [72] | ● | ○ | ○ | ○ | ○ | ● | ○ | ○ | ● | ● | ○ | ● | ||
| AR | d’Afflisio et al. | 2018 [73,74] 2021 [75,76] | ○ | ● | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ● | ||
| R | Bauw et al. | 2020 [77] | ○ | ○ | ○ | ● | ● | ○ | ○ | ○ | ○ | ○ | ● | ○ | ||
| Van Loi et al. | 2020 [78] | ● | ○ | ● | ○ | ○ | ○ | ○ | ○ | ● | ○ | ○ | ○ | |||
| C | Fahn et al. | 2019 [79] | ○ | ○ | ○ | ● | ○ | ● | ○ | ○ | ○ | ● | ○ | ○ | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stach, T.; Kinkel, Y.; Constapel, M.; Burmeister, H.-C. Maritime Anomaly Detection for Vessel Traffic Services: A Survey. J. Mar. Sci. Eng. 2023, 11, 1174. https://doi.org/10.3390/jmse11061174
Stach T, Kinkel Y, Constapel M, Burmeister H-C. Maritime Anomaly Detection for Vessel Traffic Services: A Survey. Journal of Marine Science and Engineering. 2023; 11(6):1174. https://doi.org/10.3390/jmse11061174
Chicago/Turabian StyleStach, Thomas, Yann Kinkel, Manfred Constapel, and Hans-Christoph Burmeister. 2023. "Maritime Anomaly Detection for Vessel Traffic Services: A Survey" Journal of Marine Science and Engineering 11, no. 6: 1174. https://doi.org/10.3390/jmse11061174
APA StyleStach, T., Kinkel, Y., Constapel, M., & Burmeister, H.-C. (2023). Maritime Anomaly Detection for Vessel Traffic Services: A Survey. Journal of Marine Science and Engineering, 11(6), 1174. https://doi.org/10.3390/jmse11061174