
Study on Mitigation of Wake Interference by Combined Control of Yaw Misalignment and Pitch

 and
and
Abstract
:1. Introduction
2. Methodology
2.1. Overview of FAST.Farm
2.2. Wind Turbine Model
2.3. CYMP and Results
2.4. Simulation Setup
3. Result Analysis
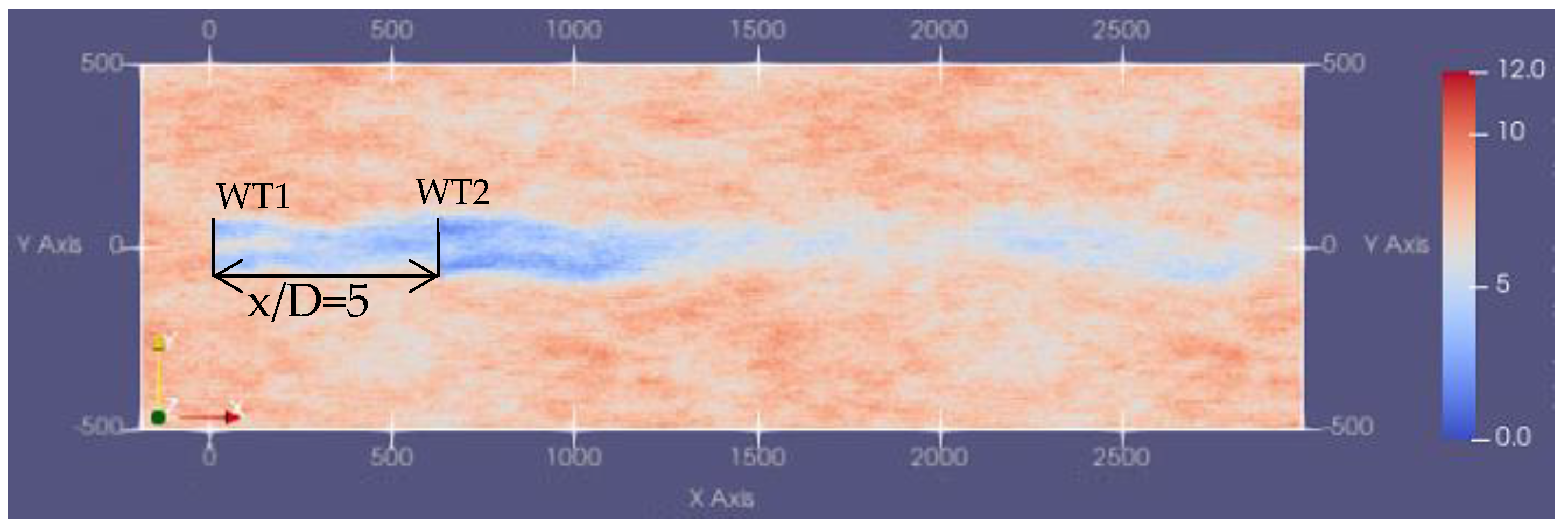
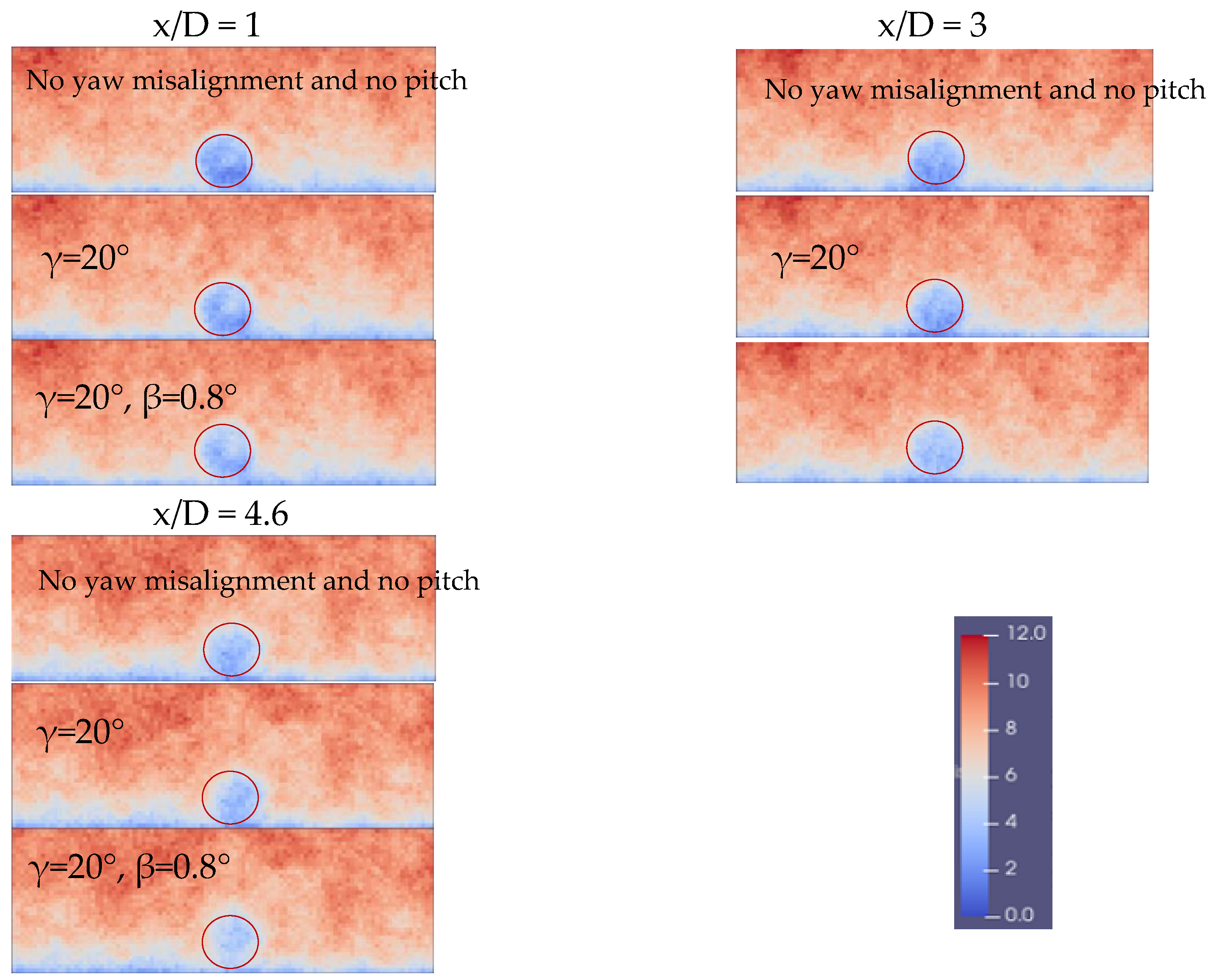
3.1. Flow Visualizations
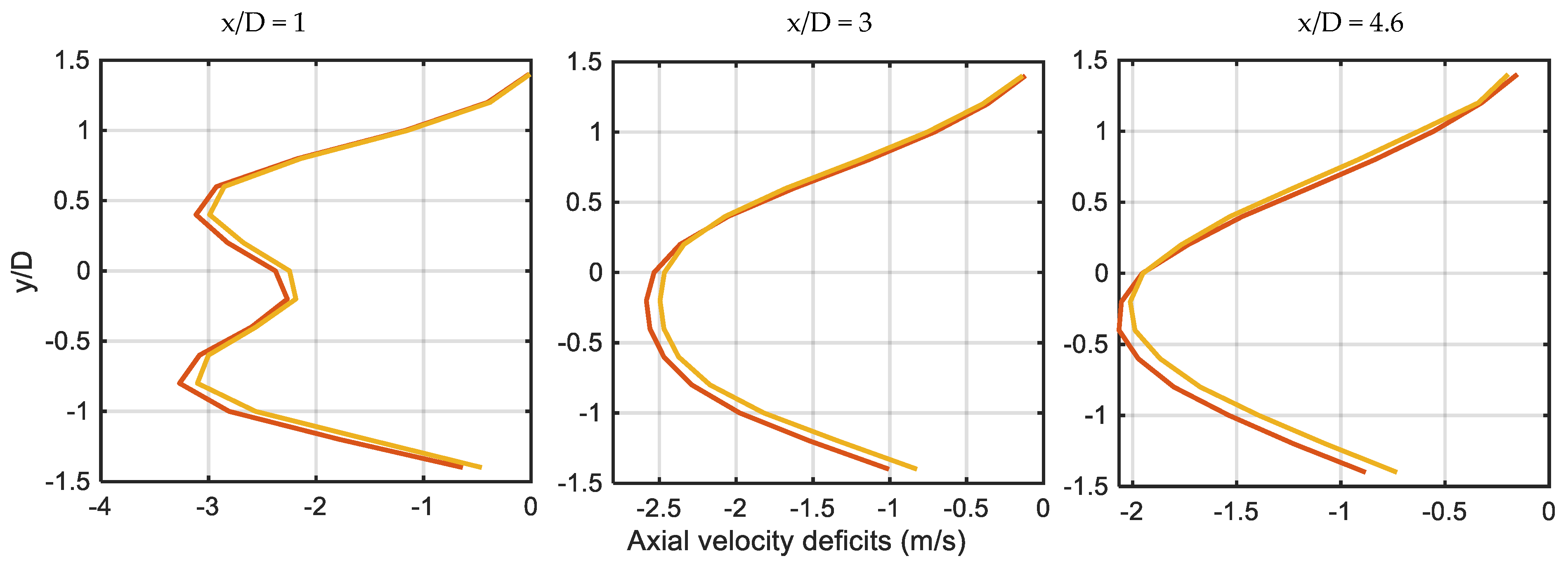
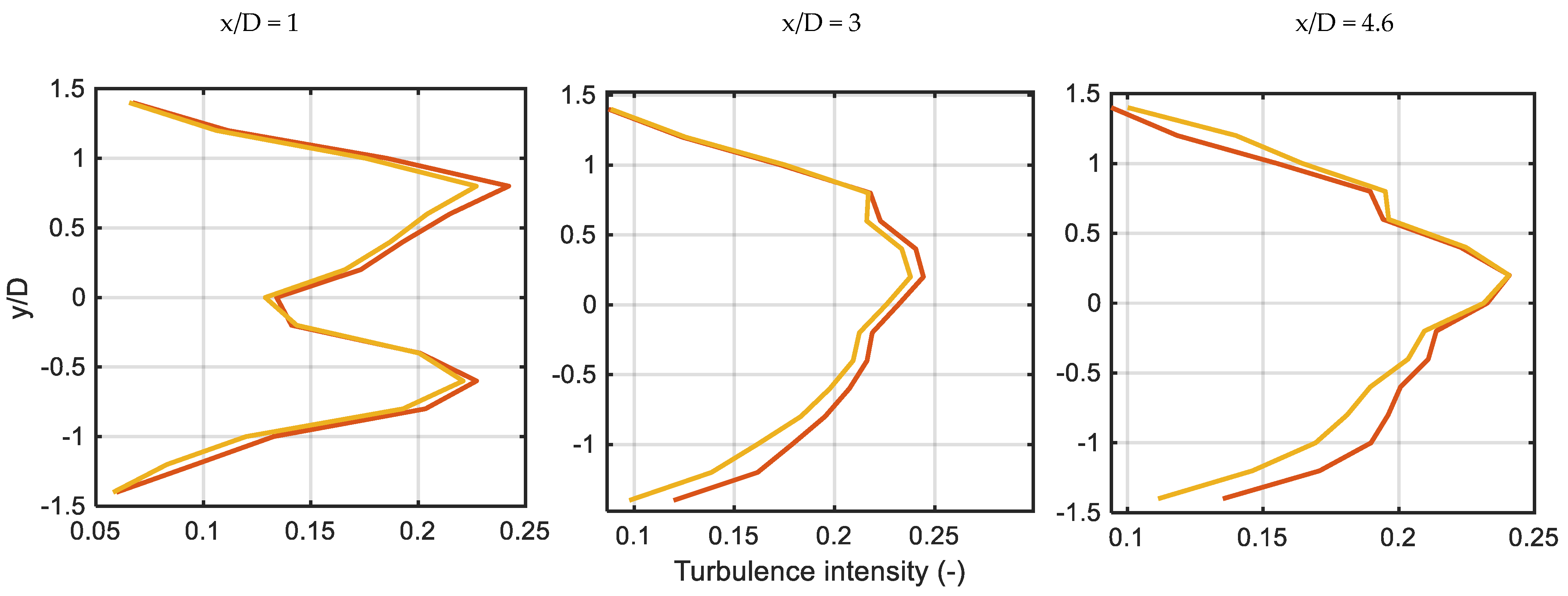
3.2. Effect on the Wake
3.3. Turbine Performance Impact
4. Cooperative Control of Wind Farm Based on Model Predictive Control of CYMP
4.1. Method Design
4.1.1. Supercontroller Design
4.1.2. Control Model of Semisubmersible Floating Wind Turbine
4.1.3. MPC Controller for Wind Turbine
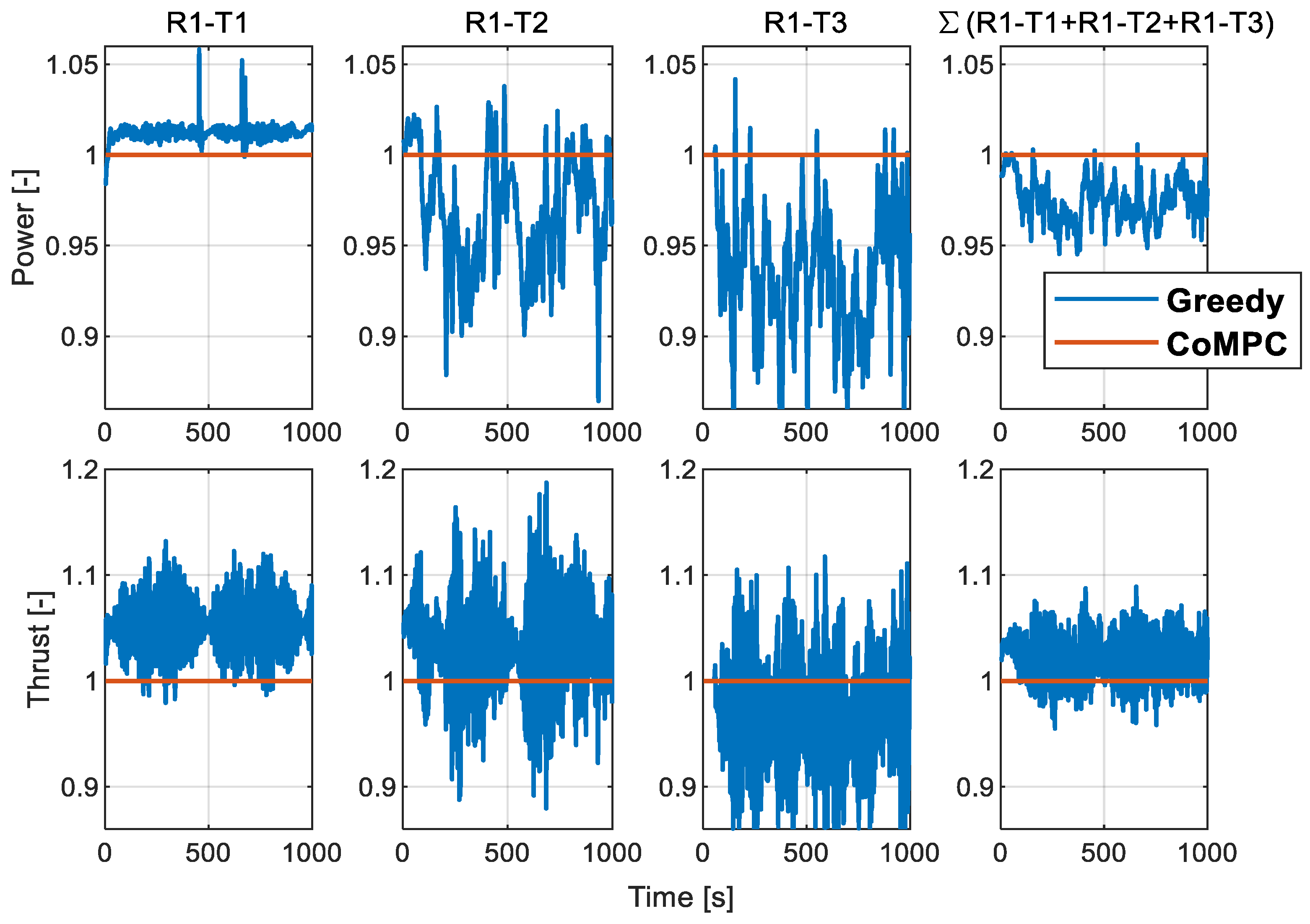
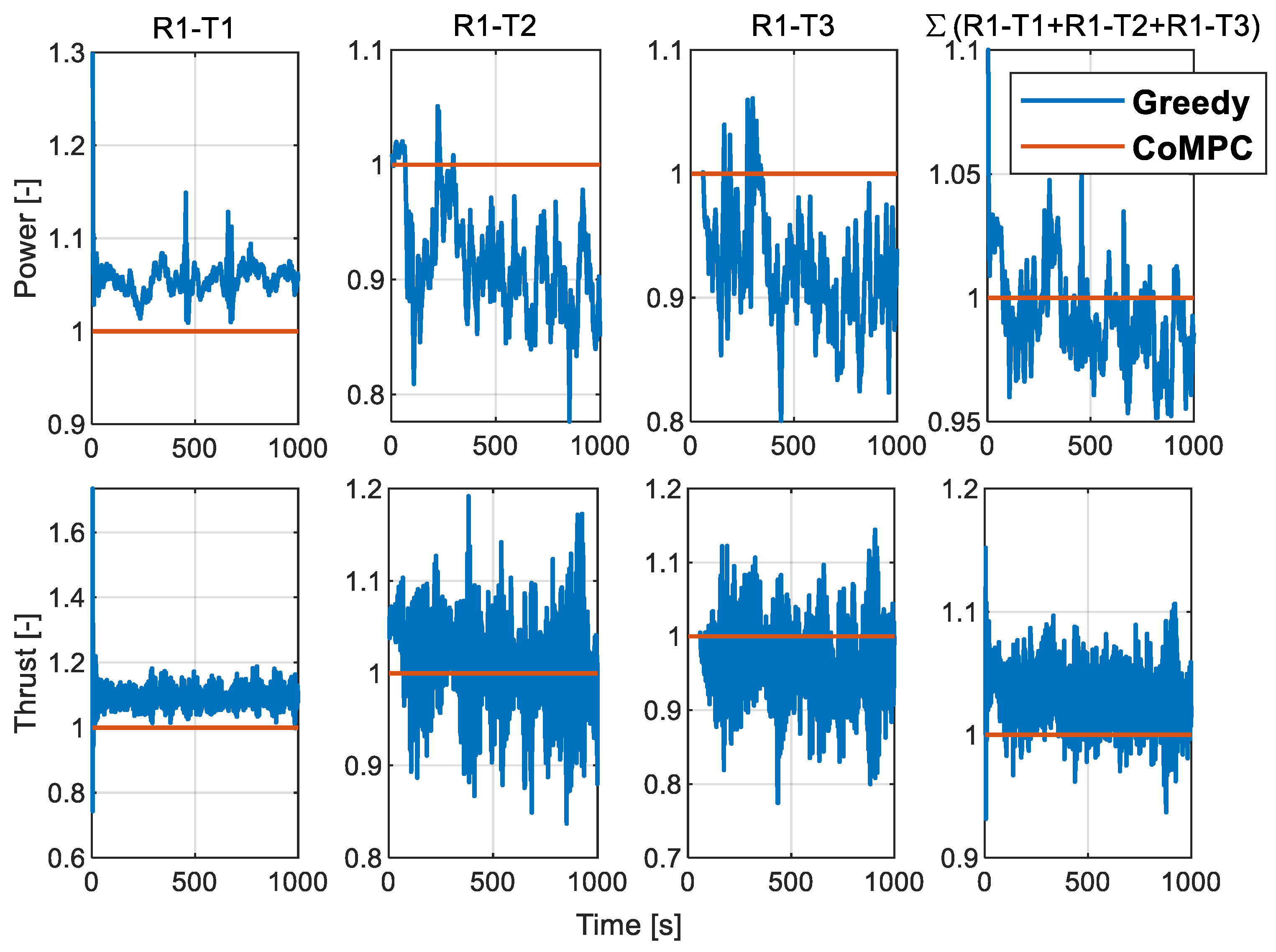
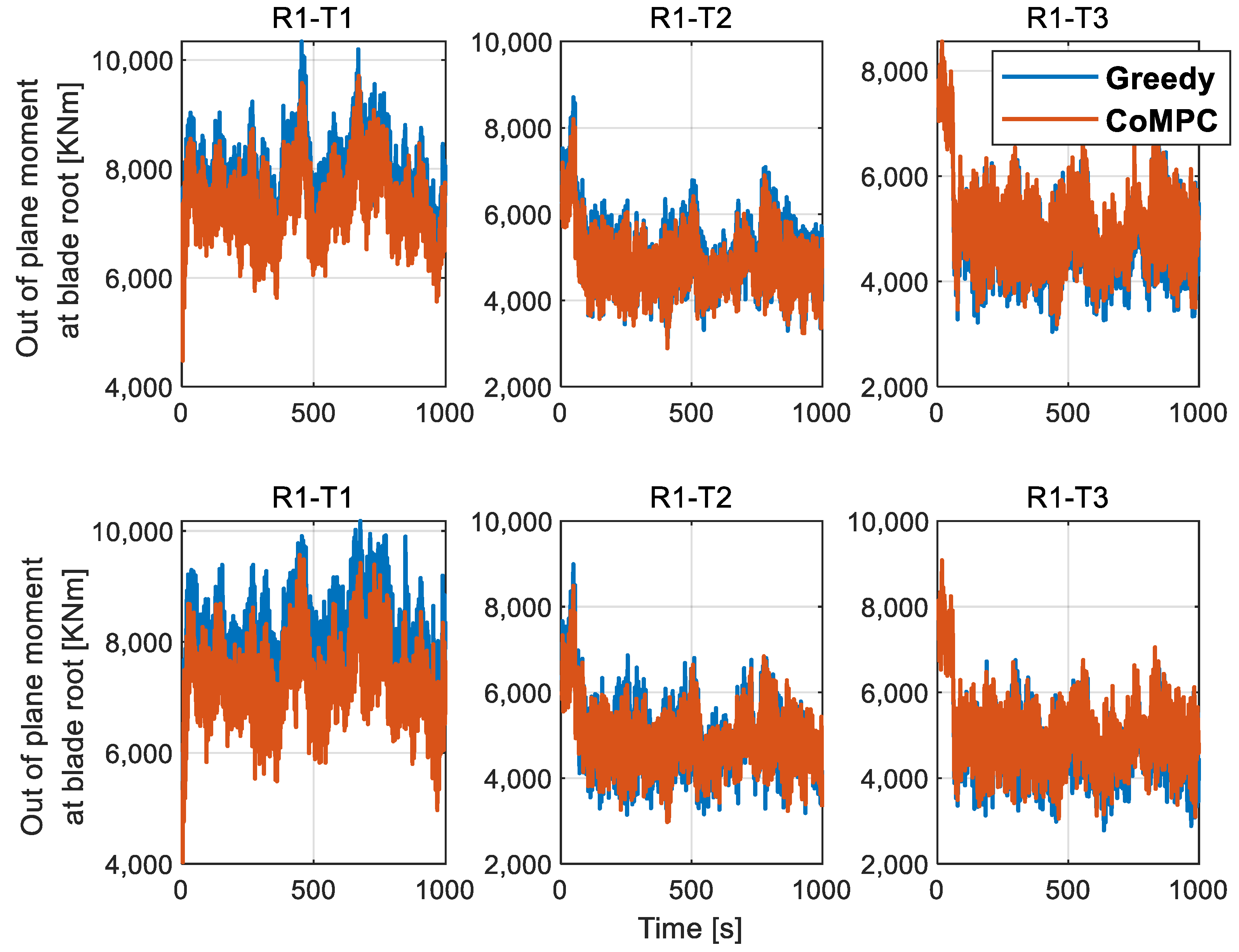
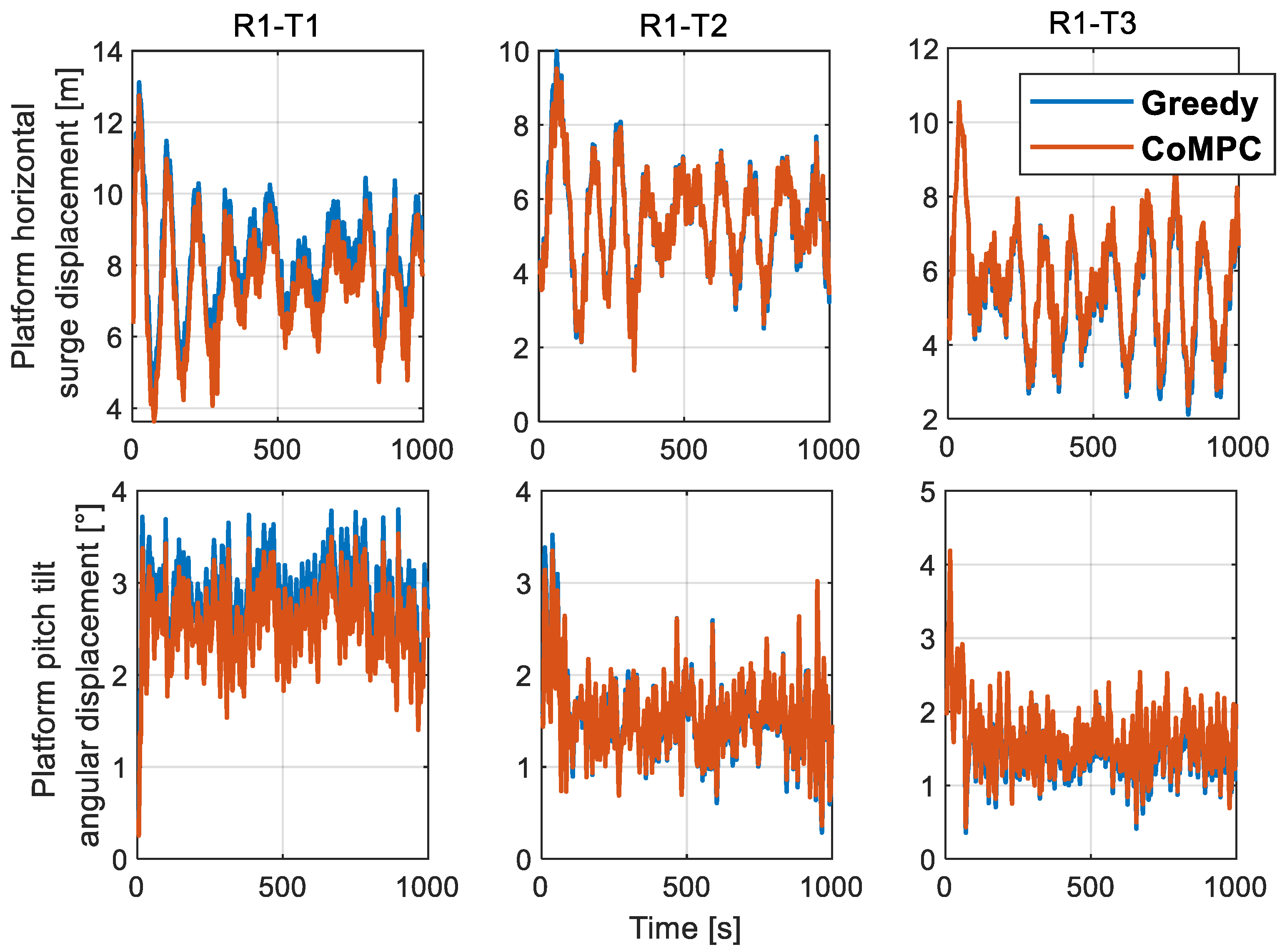
4.2. Result
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Global Wind Energy Council. Global Wind Report 2021. 2020. Available online: https://gwec.net/wp-content/uploads/2021/03/GWEC-Global-Wind-Report-2021.pdf (accessed on 12 May 2023).
- Global Wind Energy Council. Global Wind Report 2022. 2021. Available online: https://gwec.net/wp-content/uploads/2022/03/GWEC-GLOBAL-WIND-REPORT-2022.pdf (accessed on 12 May 2023).
- Xue, L.; Wang, J.; Zhao, L.; Wei, Z.; Yu, M.; Xue, Y. Wake Interactions of Two Tandem Semisubmersible Floating Offshore Wind Turbines Based on FAST.Farm. J. Mar. Sci. Eng. 2022, 10, 1962. [Google Scholar] [CrossRef]
- Nilsson, K.; Ivanell, S.; Hansen, K.S.; Mikkelsen, R.; Sørensen, J.N.; Breton, S.P.; Henningson, D. Large-eddy simulations of the Lillgrund wind farm. Wind Energy 2015, 18, 449–467. [Google Scholar] [CrossRef]
- Lissaman, P. Energy effectiveness of arbitrary arrays of wind turbines. J. Energy 1979, 3, 323–328. [Google Scholar] [CrossRef]
- Andersson, L.E.; Anaya-Lara, O.; Tande, J.O.G.; Merz, K.O.; Imsland, L.S. Wind farm control—Part I: A review on control system concepts and structures. IET Renew. Power Gener. 2021, 15, 2085–2108. [Google Scholar] [CrossRef]
- Zhao, L.; Xue, L.; Li, Z.; Wang, J.; Yang, Z.; Xue, Y. Progress on Offshore Wind Farm Dynamic Wake Management for Energy. J. Mar. Sci. Eng. 2022, 10, 1395. [Google Scholar] [CrossRef]
- Zhao, L.; Gong, F.; Chen, S.; Wang, J.; Xue, L.; Xue, Y. Optimization study of control strategy for combined multi-wind turbines energy production and loads during wake effects. Energy Rep. 2022, 8, 1098–1107. [Google Scholar] [CrossRef]
- Speakman, G.A.; Abkar, M.; Martínez-Tossas, L.A.; Bastankhah, M. Wake steering of multi-rotor wind turbines: A new wind farm control strategy. arXiv 2020, arXiv:2006.11874. [Google Scholar]
- Dou, B.; Guala, M.; Lei, L.; Zeng, P. Experimental investigation of the performance and wake effect of a small-scale wind turbine in a wind tunnel. Energy 2019, 166, 819–833. [Google Scholar] [CrossRef]
- Bastankhah, M.; Shapiro, C.R.; Shamsoddin, S.; Gayme, D.F.; Meneveau, C. A vortex sheet based analytical model of the curled wake behind yawed wind turbines. J. Fluid Mech. 2022, 933, A2. [Google Scholar] [CrossRef]
- Mohammadi, M.; Bastankhah, M.; Fleming, P.; Churchfield, M.; Bossanyi, E.; Landberg, L.; Ruisi, R. Curled-Skewed Wakes behind Yawed Wind Turbines Subject to Veered Inflow. Energies 2022, 15, 9135. [Google Scholar] [CrossRef]
- Archer, C.L.; Vasel-Be-Hagh, A. Wake steering via yaw control in multi-turbine wind farms: Recommendations based on large-eddy simulation. Sustain. Energy Technol. Assess. 2019, 33, 34–43. [Google Scholar] [CrossRef]
- Adaramola, M.; Krogstad, P.-Å. Experimental investigation of wake effects on wind turbine performance. Renew. Energy 2011, 36, 2078–2086. [Google Scholar] [CrossRef]
- Campagnolo, F.; Petrović, V.; Schreiber, J.; Nanos, E.M.; Croce, A.; Bottasso, C.L. Wind tunnel testing of a closed-loop wake deflection controller for wind farm power maximization. J. Phys. Conf. Ser. 2016, 753, 032006. [Google Scholar] [CrossRef] [Green Version]
- Howland, M.F.; Lele, S.K.; Dabiri, J.O. Wind farm power optimization through wake steering. Proc. Natl. Acad. Sci. USA 2019, 116, 14495–14500. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schreiber, J.; Salbert, B.; Bottasso, C. Study of wind farm control potential based on SCADA data. J. Phys. Conf. Ser. 2018, 1037, 032012. [Google Scholar] [CrossRef]
- Lin, M.; Porté-Agel, F. Power maximization and fatigue-load mitigation in a wind-turbine array by active yaw control: An LES study. J. Phys. Conf. Ser. 2020, 1618, 042036. [Google Scholar] [CrossRef]
- Churchfield, M.J.; Fleming, P.; Bulder, B.; White, S.M. Wind turbine wake-redirection control at the Fishermen’s Atlantic City windfarm. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 4–7 May 2015. [Google Scholar]
- Dilip, D.; Porté-Agel, F. Wind turbine wake mitigation through blade pitch offset. Energies 2017, 10, 757. [Google Scholar] [CrossRef]
- Lee, J.; Son, E.; Hwang, B.; Lee, S. Blade pitch angle control for aerodynamic performance optimization of a wind farm. Renew. Energy 2013, 54, 124–130. [Google Scholar] [CrossRef]
- Behnood, A.; Gharavi, H.; Vahidi, B.; Riahy, G. Optimal output power of not properly designed wind farms, considering wake effects. Int. J. Electr. Power Energy Syst. 2014, 63, 44–50. [Google Scholar] [CrossRef]
- Navarrete, E.C.; Perea, M.T.; Correa, J.J.; Serrano, R.C.; Moreno, G.R. Expert control systems implemented in a pitch control of wind turbine: A review. IEEE Access 2019, 7, 13241–13259. [Google Scholar] [CrossRef]
- Tian, J.; Zhou, D.; Su, C.; Blaabjerg, F.; Chen, Z. Optimal control to increase energy production of wind farm considering wake effect and lifetime estimation. Appl. Sci. 2017, 7, 65. [Google Scholar] [CrossRef] [Green Version]
- Corten, G.; Schaak, P. Heat and Flux. Increase of Wind Farm Production by Reduction of the Axial Induction. In Proceedings of the European Wind Energy Conference, Madrid, Spain, 16–19 June 2003. [Google Scholar]
- Bartl, J.; Sætran, L. Experimental testing of axial induction based control strategies for wake control and wind farm optimization. J. Phys. Conf. Ser. 2016, 753, 032035. [Google Scholar] [CrossRef]
- Campagnolo, F.; Petrović, V.; Bottasso, C.L.; Croce, A. Wind tunnel testing of wake control strategies. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 513–518. [Google Scholar]
- Kim, H.; Kim, K.; Paek, I. Model based open-loop wind farm control using active power for power increase and load reduction. Appl. Sci. 2017, 7, 1068. [Google Scholar] [CrossRef] [Green Version]
- McTavish, S.; Feszty, D.; Nitzsche, F. Evaluating Reynolds number effects in small-scale wind turbine experiments. J. Wind Eng. Ind. Aerodyn. 2013, 120, 81–90. [Google Scholar] [CrossRef]
- Annoni, J.; Gebraad, P.M.; Scholbrock, A.K.; Fleming, P.A.; Van Wingerden, J.W. Analysis of axial-induction-based wind plant control using an engineering and a high-order wind plant model. Wind Energy 2016, 19, 1135–1150. [Google Scholar] [CrossRef]
- Ha, K.; Truong, H.V.A.; Dang, T.D.; Ahn, K.K. Recent control technologies for floating offshore wind energy system: A review. Int. J. Precis. Eng. Manuf.-Green Technol. 2021, 8, 281–301. [Google Scholar] [CrossRef]
- Ishihara, T.; Qian, G.-W. A new Gaussian-based analytical wake model for wind turbines considering ambient turbulence intensities and thrust coefficient effects. J. Wind Eng. Ind. Aerodyn. 2018, 177, 275–292. [Google Scholar] [CrossRef]
- Smith, S.D. Thrust-anemometer measurements of wind turbulence, Reynolds stress, and drag coefficient over the sea. J. Geophys. Res. 1970, 75, 6758–6770. [Google Scholar] [CrossRef]
- Bossanyi, E. Combining induction control and wake steering for wind farm energy and fatigue loads optimisation. J. Phys. Conf. Ser. 2018, 1037, 032011. [Google Scholar] [CrossRef] [Green Version]
- Ainslie, J.F. Calculating the flowfield in the wake of wind turbines. J. Wind Eng. Ind. Aerodyn. 1988, 27, 213–224. [Google Scholar] [CrossRef]
- Medici, D. Experimental Studies of Wind Turbine Wakes: Power Optimisation and Meandering. KTH. 2005. Available online: https://www.diva-portal.org/smash/get/diva2:14563/FULLTEXT01.pdfPower (accessed on 12 May 2023).
- Bianchi, F.D.; De Battista, H.; Mantz, R.J. Wind Turbine Control Systems: Principles, Modelling and Gain Scheduling Design; Springer: Berlin/Heidelberg, Germany, 2007; Volume 19. [Google Scholar]
- Gebraad, P.M.; Teeuwisse, F.; Van Wingerden, J.; Fleming, P.A.; Ruben, S.; Marden, J.; Pao, L. Wind plant power optimization through yaw control using a parametric model for wake effects—A CFD simulation study. Wind Energy 2016, 19, 95–114. [Google Scholar] [CrossRef]
- Kragh, K.A.; Hansen, M.H. Load alleviation of wind turbines by yaw misalignment. Wind Energy 2014, 17, 971–982. [Google Scholar] [CrossRef]
- Jensen, N.O. A Note on Wind Generator Interaction; Risø National Laboratory: Roskilde, Denmark, 1983. [Google Scholar]
- Katic, I.; Højstrup, J.; Jensen, N.O. A simple model for cluster efficiency. In Proceedings of the European Wind Energy Association Conference and Exhibition, Rome, Italy, 7–9 October 1986; pp. 407–410. [Google Scholar]
- Jiménez, Á.; Crespo, A.; Migoya, E. Application of a LES technique to characterize the wake deflection of a wind turbine in yaw. Wind Energy 2010, 13, 559–572. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Rated power (MW) | 5 |
| Blades number (−) | 3 |
| Cut-in, cut-out, rated wind speed (m/s) | 3, 25, 11.4 |
| Cut-in, rated rotor speed (rpm) | 6.9, 12.1 |
| Hub height (m) | 90 |
| Rotor diameter (m) | 126 |
| Parameter | Value |
|---|---|
| Turbulence intensity (−) | 6% |
| Average wind speed (m/s) | 7.5 |
| Turbulence model | Kaimal model |
| Wind shear [−] | 0.13 |
| Method Name | Yaw Misalignment [°] | Pitch Angle [°] |
|---|---|---|
| entry 1 | 5/10/15/20/ 25/30/35/40 | 0 |
| entry 2 | 5 | 0.2/0.4/0.6/0.8/1.0 |
| 10 15 | ||
| 20 | ||
| 25 | ||
| 30 | ||
| 35 | ||
| 40 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.; Gong, Y.; Gong, F.; Zheng, B.; Wang, J.; Xue, L.; Xue, Y. Study on Mitigation of Wake Interference by Combined Control of Yaw Misalignment and Pitch. J. Mar. Sci. Eng. 2023, 11, 1288. https://doi.org/10.3390/jmse11071288
Zhao L, Gong Y, Gong F, Zheng B, Wang J, Xue L, Xue Y. Study on Mitigation of Wake Interference by Combined Control of Yaw Misalignment and Pitch. Journal of Marine Science and Engineering. 2023; 11(7):1288. https://doi.org/10.3390/jmse11071288
Chicago/Turabian StyleZhao, Liye, Yongxiang Gong, Feixiang Gong, Bowen Zheng, Jundong Wang, Lei Xue, and Yu Xue. 2023. "Study on Mitigation of Wake Interference by Combined Control of Yaw Misalignment and Pitch" Journal of Marine Science and Engineering 11, no. 7: 1288. https://doi.org/10.3390/jmse11071288