
A COLREGs-Compliant Ship Collision Avoidance Decision-Making Support Scheme Based on Improved APF and NMPC

Abstract
:1. Introduction
- (1)
- According to some critical rules of COLREGs, the repulsive potential field for three encounter scenarios, i.e., head-on, crossing and overtaking situations, is developed and improved in this paper.
- (2)
- A standard 3 DOF MMG model is applied to denote ship maneuvering motion characteristics in the process of collision avoidance, and then, a collision avoidance decision-making support scheme is proposed by incorporating the IAPF method into the NMPC design.
- (3)
- The coordinated ship domain, which considers ship maneuverability and mutual interaction of meeting ships, is applied to determine the safety criteria in the process of collision avoidance.
2. Improved Artificial Potential Field Method
2.1. Attractive Potential Field
2.2. COLREGs-Compliant Repulsive Potential Field
2.3. Coordinated Ship Domain
3. Collision Avoidance Decision-Making Support Scheme Based on IAPF and NMPC
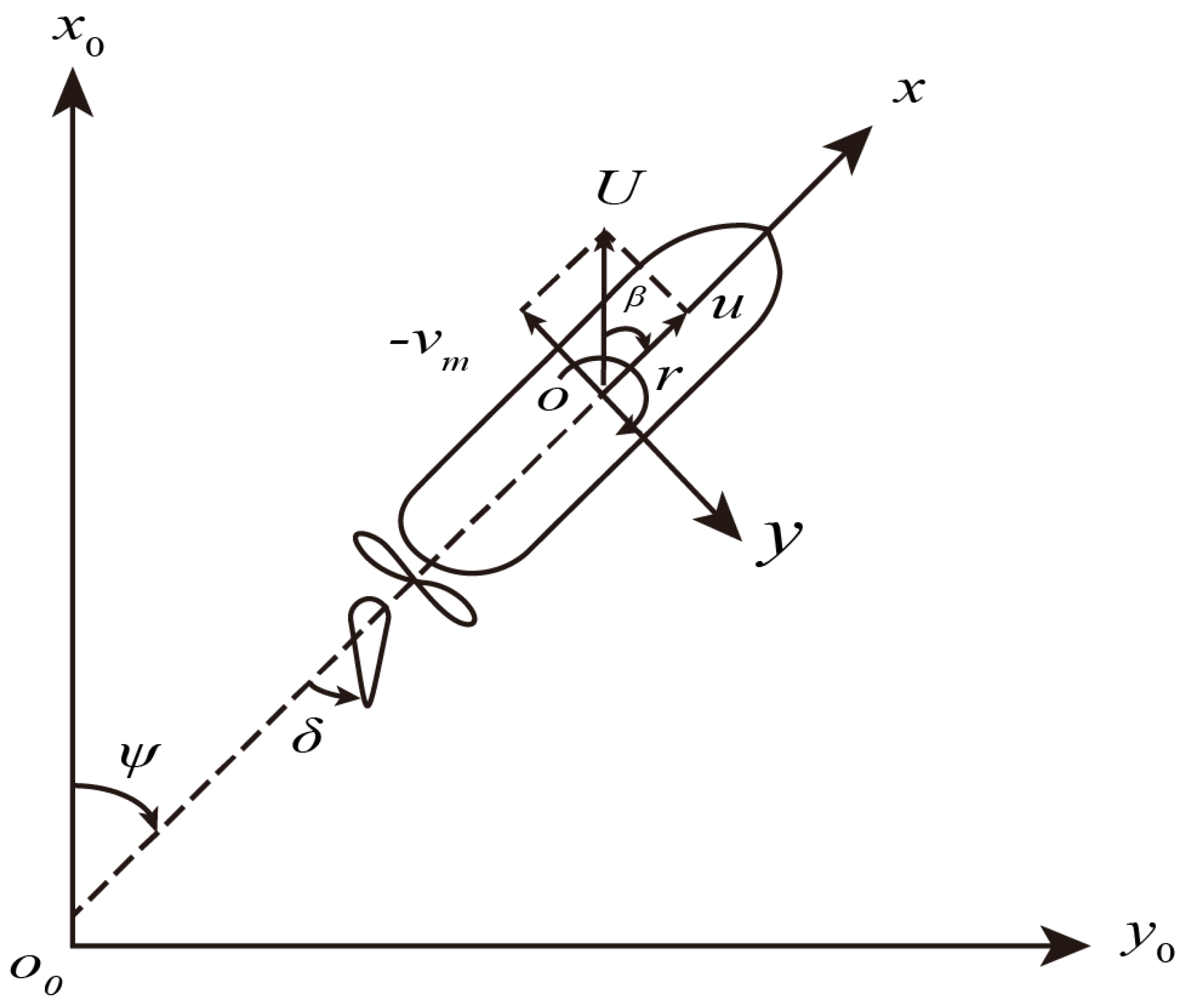
3.1. Maneuvering Modeling Group (MMG) Model
3.2. Nonlinear Model Predictive Control Design
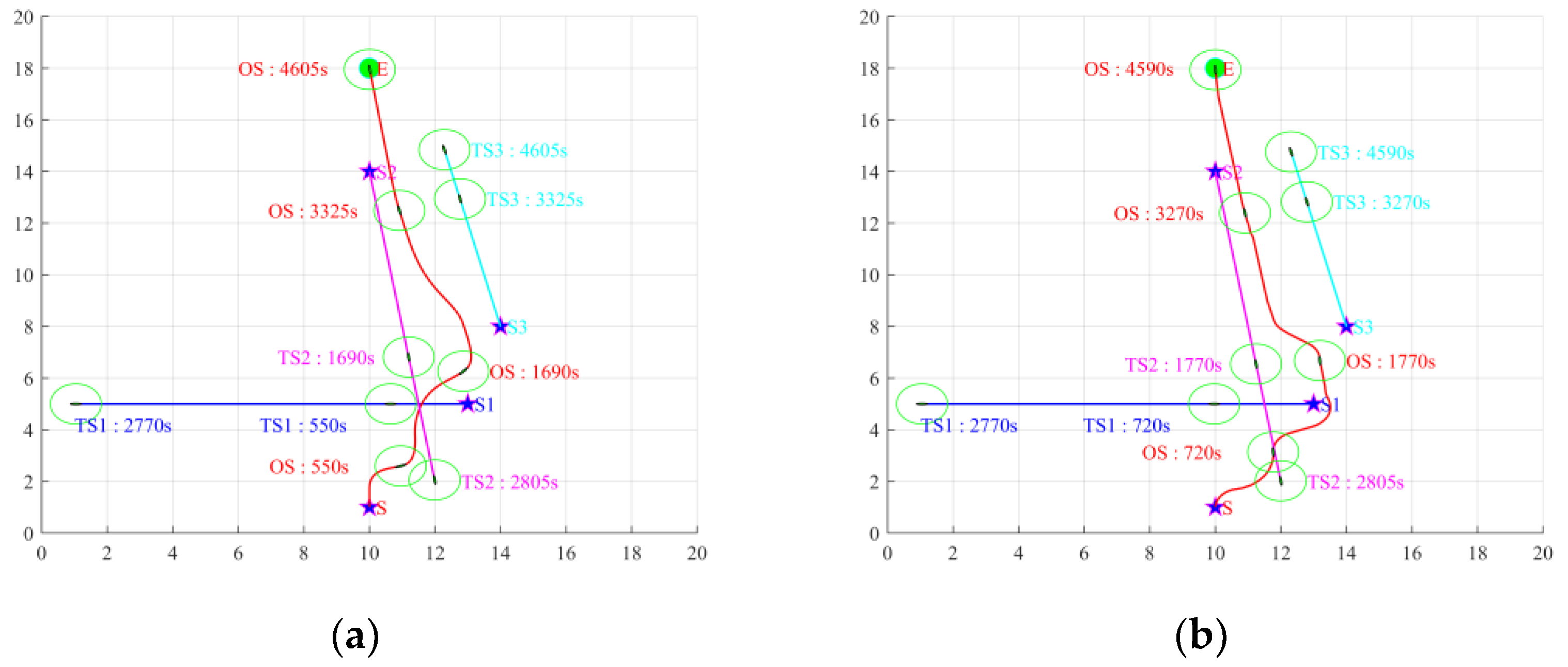
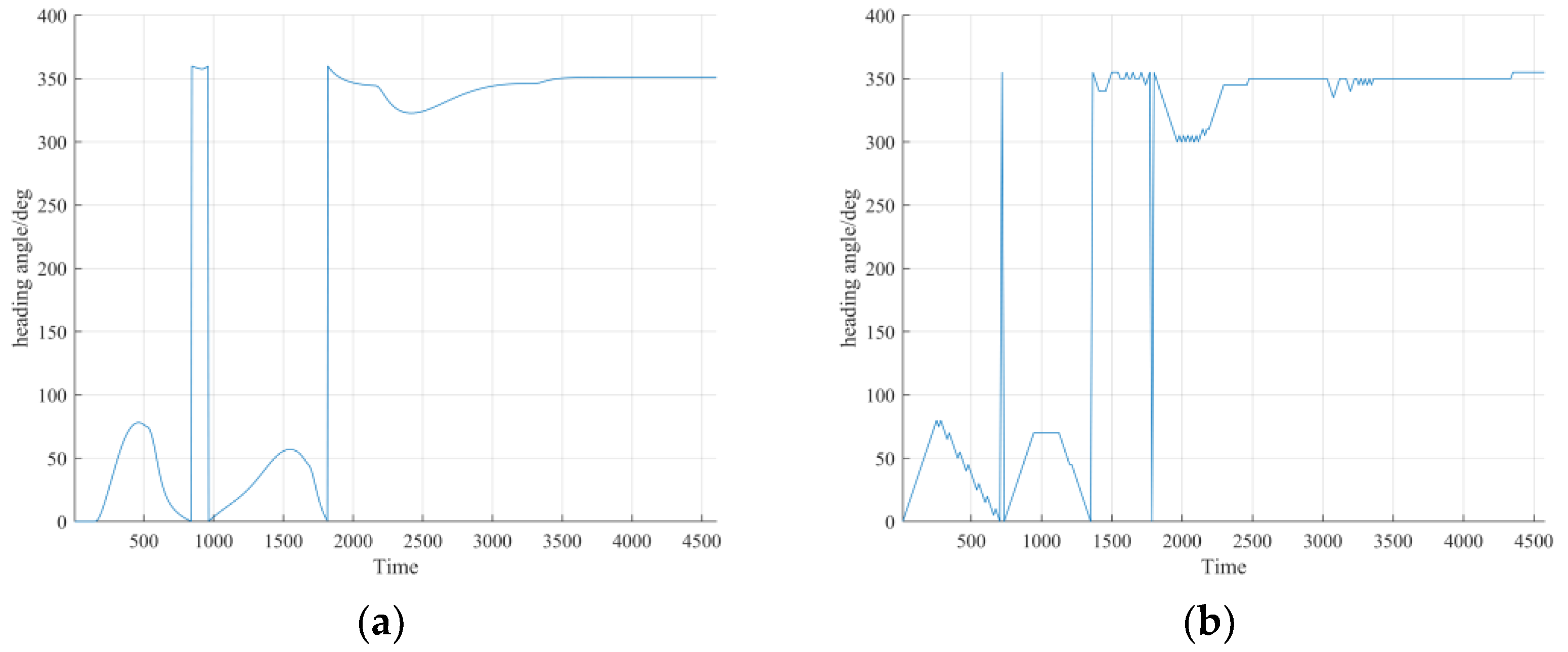
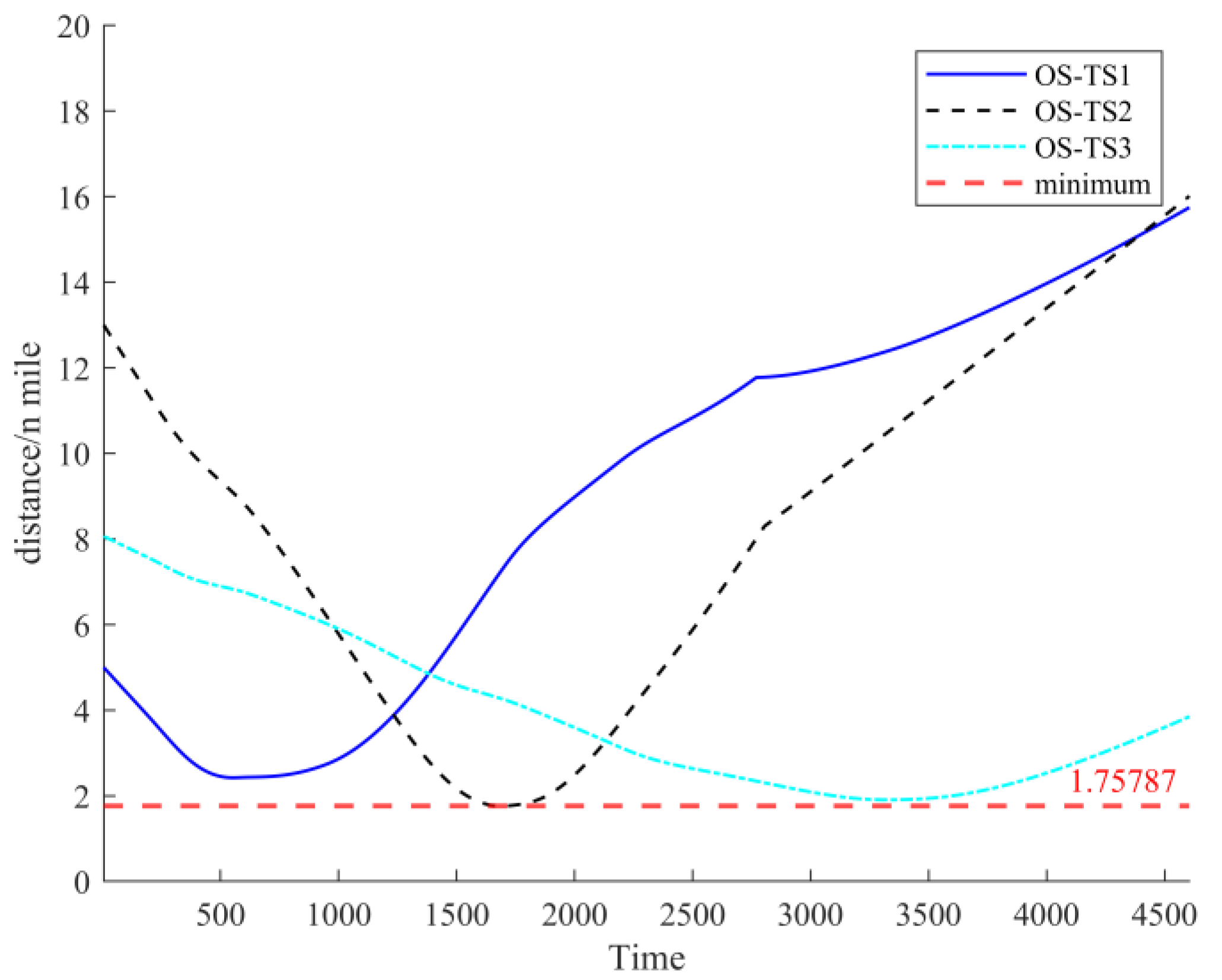
4. Simulation and Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chauvin, C.; Lardjane, S.; Morel, G.; Clostermann, J.P.; Langard, B. Human and organisational factors in maritime accidents: Analysis of collisions at sea using the HFACS. Accid. Anal. Prev. 2013, 59, 26–37. [Google Scholar] [CrossRef] [PubMed]
- Huang, Y.; Chen, L.; Chen, P.; Negenborn, R.R.; Van Gelder, P.H.A.J.M. Ship collision avoidance methods: State-of-the-art. Saf. Sci. 2020, 121, 451–473. [Google Scholar] [CrossRef]
- Ma, Y.; Zhao, Y.; Li, Z.; Yan, X.; Bi, H.; Królczyk, G. A new coverage path planning algorithm for unmanned surface mapping vehicle based on A-star based searching. Appl. Ocean Res. 2022, 123, 103163. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, H.; Liu, J.; Wu, D.; Soares, C.G. A Two-Stage Path Planning Algorithm Based on Rapid-Exploring Random Tree for Ships Navigating in Multi-Obstacle Water Areas Considering COLREGs. J. Mar. Sci. Eng. 2022, 10, 1441. [Google Scholar] [CrossRef]
- Chen, C.; Chen, X.Q.; Ma, F.; Zeng, X.J.; Wang, J. A knowledge-free path planning approach for smart ships based on reinforcement learning. Ocean Eng. 2019, 189, 106299. [Google Scholar] [CrossRef]
- Khatib, O. The potential field approach and operational space formulation in robot control. In Adaptive and Learning Systems: Theory and Applications; Springer: Boston, MA, USA, 1986; pp. 367–377. [Google Scholar]
- Pan, Z.; Zhang, C.; Xia, Y.; Xiong, H.; Shao, X. An improved artificial potential field method for path planning and formation control of the multi-UAV systems. IEEE Trans. Circuits Syst. II Express Briefs 2021, 69, 1129–1133. [Google Scholar] [CrossRef]
- Huang, Y.; Ding, H.; Zhang, Y.; Wang, H.; Cao, D.; Xu, N.; Hu, C. A motion planning and tracking framework for autonomous vehicles based on artificial potential field elaborated resistance network approach. IEEE Trans. Ind. Electron. 2019, 67, 1376–1386. [Google Scholar] [CrossRef]
- Lyu, H.; Yin, Y. Ship’s trajectory planning for collision avoidance at sea based on modified artificial potential field. In Proceedings of the 2017 2nd International Conference on Robotics and Automation Engineering (ICRAE), Shanghai, China, 29–31 December 2017; pp. 351–357. [Google Scholar]
- Lazarowska, A. A discrete artificial potential field for ship trajectory planning. J. Navig. 2020, 73, 233–251. [Google Scholar] [CrossRef]
- Lyu, H.; Yin, Y. COLREGS-constrained real-time path planning for autonomous ships using modified artificial potential fields. J. Navig. 2019, 72, 588–608. [Google Scholar] [CrossRef]
- Han, S.; Wang, L.; Wang, Y. A COLREGs-compliant guidance strategy for an underactuated unmanned surface vehicle combining potential field with grid map. Ocean Eng. 2022, 255, 111355. [Google Scholar] [CrossRef]
- Li, L.; Wu, D.; Huang, Y.; Yuan, Z.M. A path planning strategy unified with a COLREGS collision avoidance function based on deep reinforcement learning and artificial potential field. Appl. Ocean Res. 2021, 113, 102759. [Google Scholar] [CrossRef]
- Ni, S.; Liu, Z.; Huang, D.; Cai, Y.; Wang, X.; Gao, S. An application-orientated anti-collision path planning algorithm for unmanned surface vehicles. Ocean Eng. 2021, 235, 109298. [Google Scholar] [CrossRef]
- Oh, S.R.; Sun, J. Path following of underactuated marine surface vessels using line-of-sight based model predictive control. Ocean Eng. 2010, 37, 289–295. [Google Scholar] [CrossRef]
- Liu, C.; Wang, D.; Zhang, Y.; Meng, X. Model predictive control for path following and roll stabilization of marine vessels based on neurodynamic optimization. Ocean Eng. 2020, 217, 107524. [Google Scholar] [CrossRef]
- Liu, C. Motion Control of Unmanned Surface Vehicles Based on Model Predictive Control. Ph.D. Thesis, Wuhan University of Technology, Wuhan, China, 2017. [Google Scholar]
- Abdelaal, M.; Fränzle, M.; Hahn, A. Nonlinear Model Predictive Control for trajectory tracking and collision avoidance of underactuated vessels with disturbances. Ocean Eng. 2018, 160, 168–180. [Google Scholar] [CrossRef]
- Liu, C.; Hu, Q.; Wang, X.; Yin, J. Event-triggered-based nonlinear model predictive control for trajectory tracking of underactuated ship with multi-obstacle avoidance. Ocean Eng. 2022, 253, 111278. [Google Scholar] [CrossRef]
- Fahimi, F. Non-linear model predictive formation control for groups of autonomous surface vessels. Int. J. Control 2007, 80, 1248–1259. [Google Scholar] [CrossRef]
- He, Z.; Chu, X.; Liu, C.; Wu, W. A novel model predictive artificial potential field based ship motion planning method considering COLREGs for complex encounter scenarios. ISA Trans. 2023, 134, 58–73. [Google Scholar] [CrossRef]
- Sutulo, S.; Guedes Soares, C. Mathematical models for simulation of manoeuvring performance of ships. In Marine Technology and Engineering; Taylor & Francis Group: London, UK, 2011; pp. 661–698. [Google Scholar]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; Wiley: Chichester, UK, 1994. [Google Scholar]
- Yasukawa, H.; Yoshimura, Y. Introduction of MMG standard method for ship maneuvering predictions. J. Mar. Sci. Technol. 2015, 20, 37–52. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Liu, Z.; Li, T. Collision avoidance dynamic support model for ships meeting at a close range. J. Harbin Eng. Univ. 2021, 42, 1256–1261. [Google Scholar]
- Wang, X. The Research on the Safety of Ship Navigation on the Open Sea Based on Ship Maneuverability. Ph.D. Thesis, Dalian Maritime University, Dalian, China, 2017. [Google Scholar]
- Hu, L.; Naeem, W.; Rajabally, E.; Watson, G.; Mills, T.; Bhuiyan, Z.; Raeburn, C.; Salter, I.; Pekcan, C. A multiobjective optimization approach for COLREGs-compliant path planning of autonomous surface vehicles verified on networked bridge simulators. IEEE Trans. Intell. Transp. Syst. 2019, 21, 1167–1179. [Google Scholar] [CrossRef] [Green Version]
- International Maritime Organization. International Regulations for Preventing Collisions at Sea (COLREGs). Available online: http://www.imo.org/en/About/Conventions/ListOfConventions/Pages/COLREG.aspx (accessed on 20 October 2022).
- Fujii, Y.; Tanaka, K. Traffic capacity. J. Navig. 1971, 24, 543–552. [Google Scholar] [CrossRef]
- Goodwin, E.M. A statistical study of ship domains. J. Navig. 1975, 28, 328–344. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W. A Research on Numerical Prediction of Ship Maneuverability in Regular Waves. Ph.D. Thesis, Shanghai Jiao Tong University, Shanghai, China, 2016. [Google Scholar]
- Qin, S.J.; Badgwell, T.A. A survey of industrial model predictive control technology. Control Eng. Pract. 2003, 11, 733–764. [Google Scholar] [CrossRef]
- Lisowski, J. Multistage Dynamic Optimization with Different Forms of Neural-State Constraints to Avoid Many Object Collisions Based on Radar Remote Sensing. Remote Sens. 2020, 12, 1020. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Symbol | Quantity |
|---|---|---|---|
| Lpp (m) | 320.0 | Cb | 0.81 |
| B (m) | 58.0 | DP (m) | 9.86 |
| d (m) | 20.8 | HR (m) | 15.8 |
| Displacement (m3) | 312,600 | AR (m) | 112.5 |
| xG (m) | 11.2 |
| Symbol | Quantity | Symbol | Quantity | Symbol | Quantity |
|---|---|---|---|---|---|
| 0.022 | −0.049 | wp0 | 0.35 | ||
| −0.040 | −0.030 | C0 | −2.1 | ||
| 0.002 | −0.294 | −0.48 | |||
| 0.011 | 0.055 | tR | 0.387 | ||
| 0.771 | −0.013 | aH | 0.312 | ||
| −0.315 | 0.022 | −0.464 | |||
| 0.083 | 0.223 | γR ( βR < 0) | 0.395 | ||
| −1.607 | 0.011 | γR ( βR > 0) | 0.640 | ||
| 0.379 | tp | 0.220 | −0.710 | ||
| −0.391 | kt0 | 0.2931 | ε | 1.09 | |
| 0.008 | kt1 | −0.2753 | κ | 0.50 | |
| −0.137 | kt2 | −0.1385 | fα | 2.747 |
| Position | Course (°) | Surge Velocity (kn) | DCPA (nm) | |
|---|---|---|---|---|
| OS | (10,01) | 000 | 15.5 | |
| TS1 | (13,05) | 270 | 15.5 | 0.71 |
| TS2 | (10,14) | 170 | 15.5 | 1.13 |
| TS3 | (14,08) | 346 | 5.5 | 3.06 |
| Description | Notations | Value |
|---|---|---|
| Reference distance in a head-on situation (nm) | d1 | 2 |
| Reference distance in a crossing situation (nm) | d2 | 2 |
| Reference distance in an overtaking situation (nm) | d3 | 2 |
| Attractive potential field coefficient | katt | 5 |
| Repulsive potential field coefficient | krep | 200 |
| Time of each calculation step (s) | τ | 5 |
| Predictive horizon | Np | 10 |
| Control horizon | Nc | 8 |
| Steering factor | TE | 2.5 |
| Position | Course (°) | Surge Velocity (kn) | DCPA (nm) | |
|---|---|---|---|---|
| OS | (01,01) | 045 | 15.5 | |
| TS1 | (04,05) | 045 | 5.5 | 0.71 |
| TS2 | (15,02) | 315 | 14.5 | 0.53 |
| TS3 | (13,11) | 225 | 15.5 | 1.41 |
| TS4 | (04,16) | 135 | 8.5 | 1.32 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Wang, X.; Wu, T.; Ni, S. A COLREGs-Compliant Ship Collision Avoidance Decision-Making Support Scheme Based on Improved APF and NMPC. J. Mar. Sci. Eng. 2023, 11, 1408. https://doi.org/10.3390/jmse11071408
Li H, Wang X, Wu T, Ni S. A COLREGs-Compliant Ship Collision Avoidance Decision-Making Support Scheme Based on Improved APF and NMPC. Journal of Marine Science and Engineering. 2023; 11(7):1408. https://doi.org/10.3390/jmse11071408
Chicago/Turabian StyleLi, Haibin, Xin Wang, Tianhao Wu, and Shengke Ni. 2023. "A COLREGs-Compliant Ship Collision Avoidance Decision-Making Support Scheme Based on Improved APF and NMPC" Journal of Marine Science and Engineering 11, no. 7: 1408. https://doi.org/10.3390/jmse11071408