
The Experimental Study of Dynamic Response of Marine Riser under Coupling Effect of Multiparameter



Abstract
:1. Introduction
2. Riser Model and Test Equipment of the Experiment
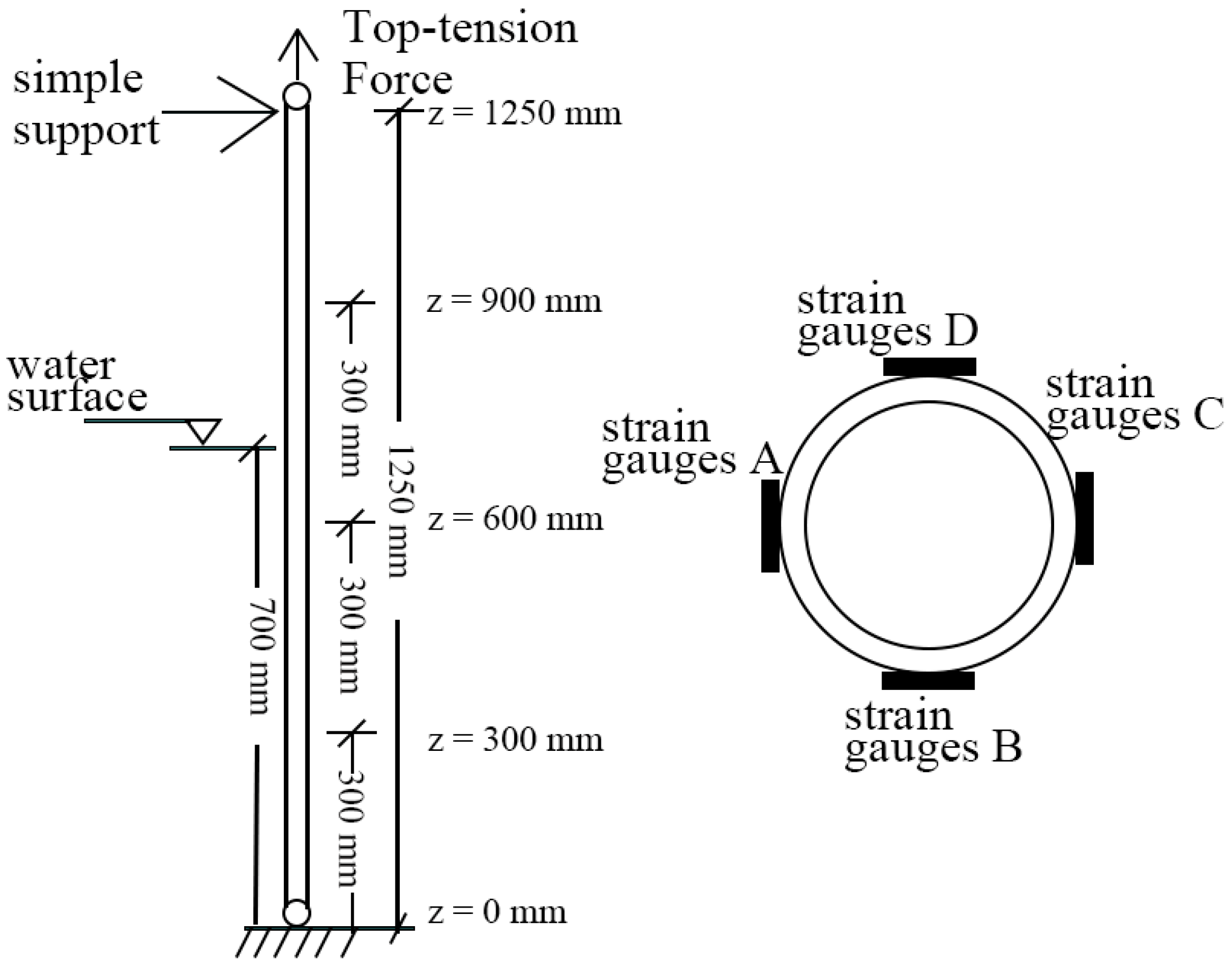
2.1. Experimental Model of Riser
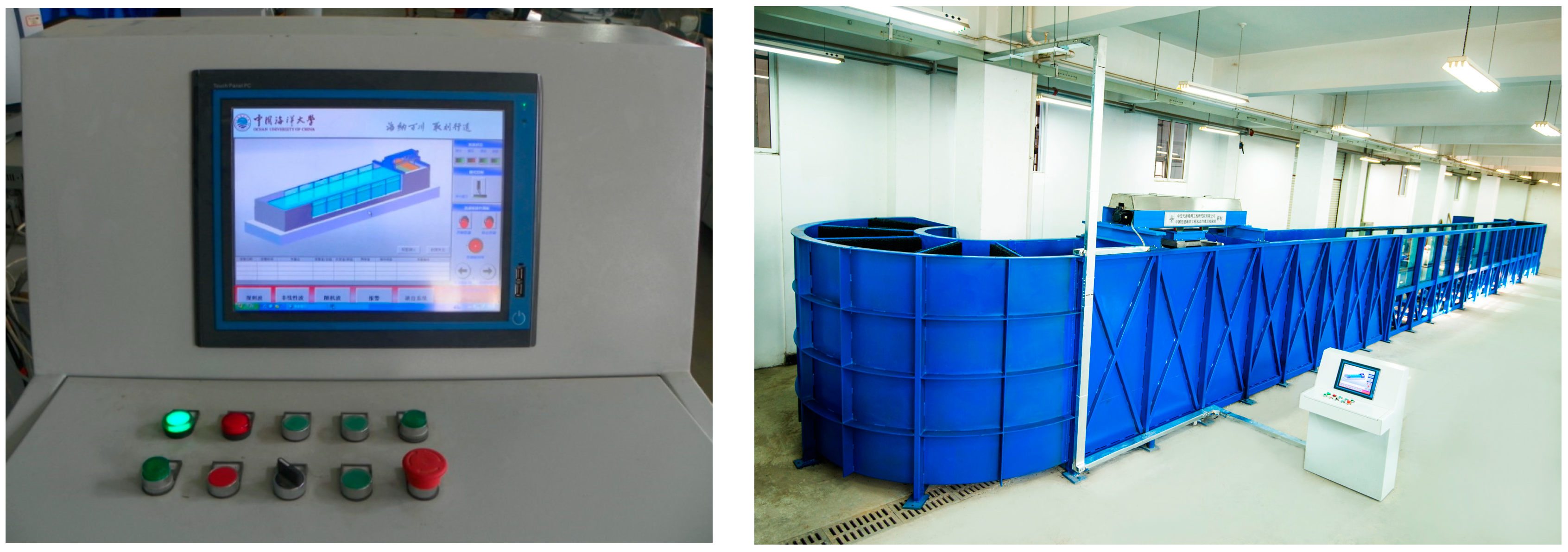
2.2. Wave–Current System
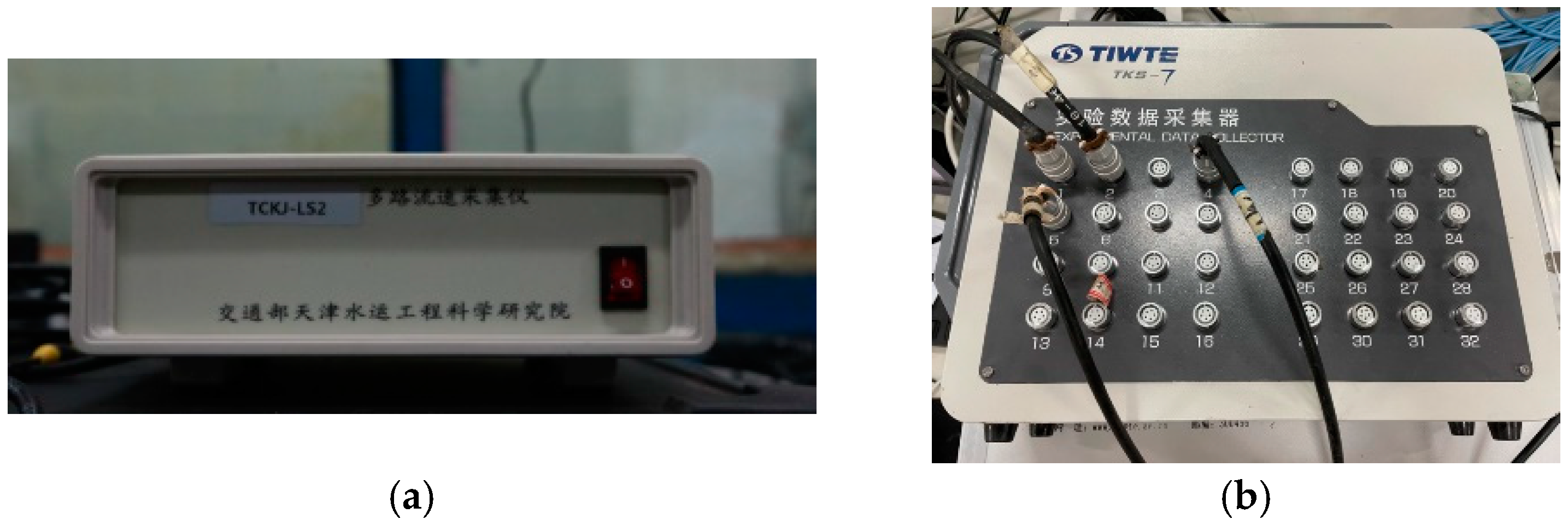
2.3. Wave–Current Monitoring System
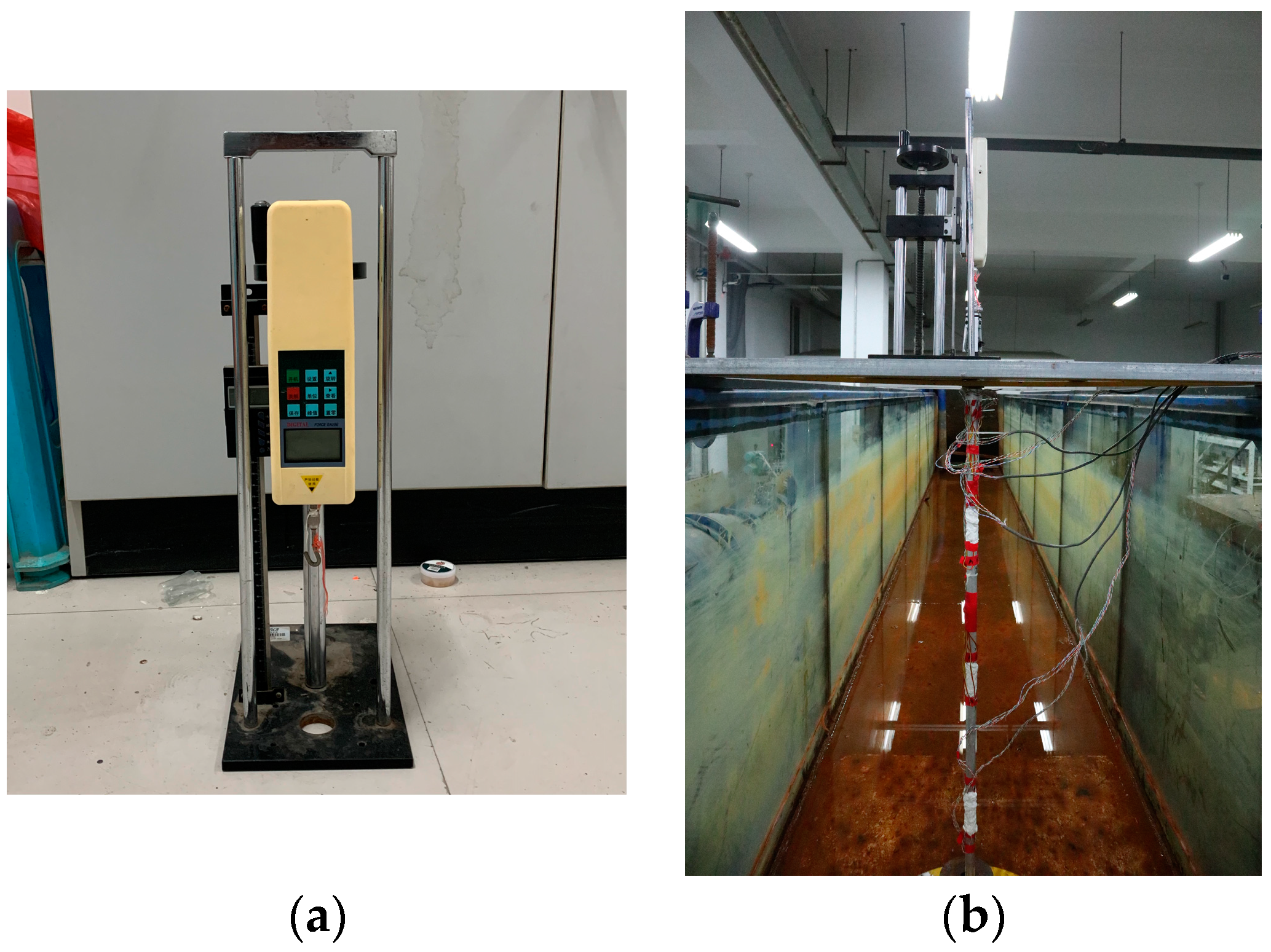
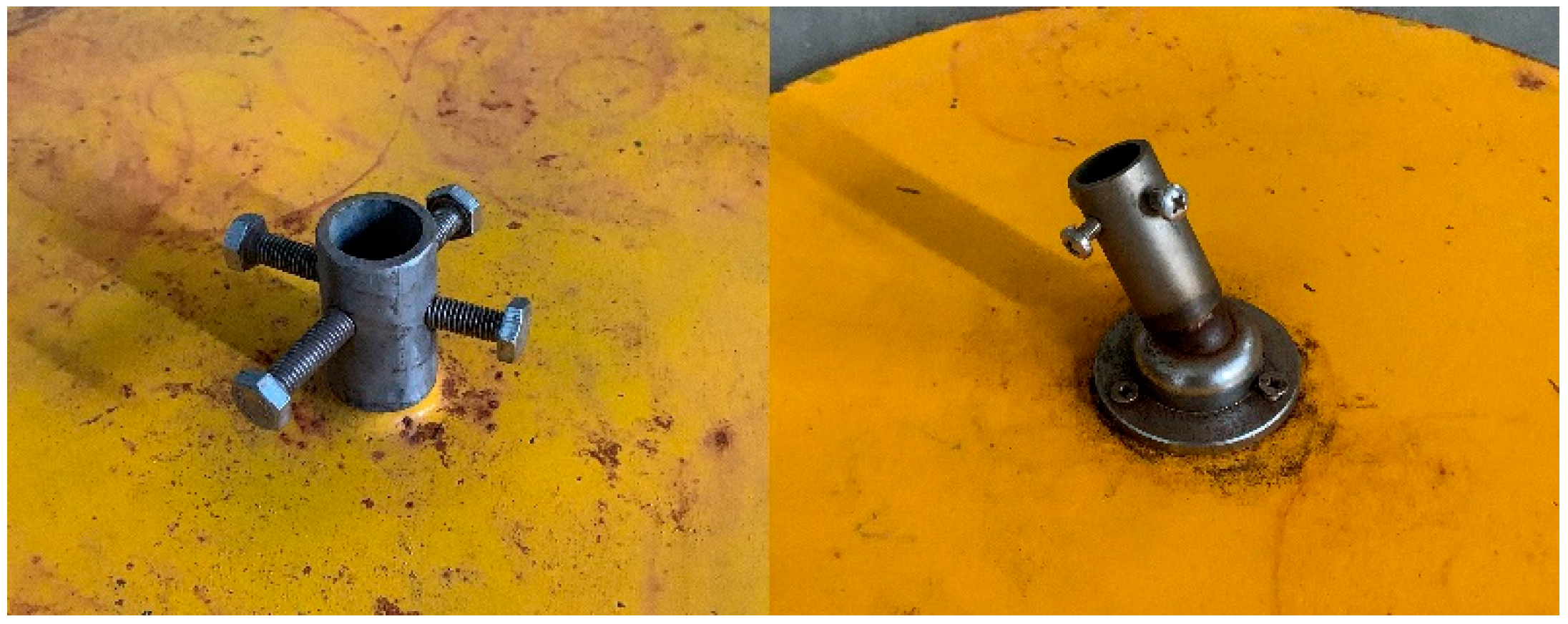
2.4. Boundary Condition Application System
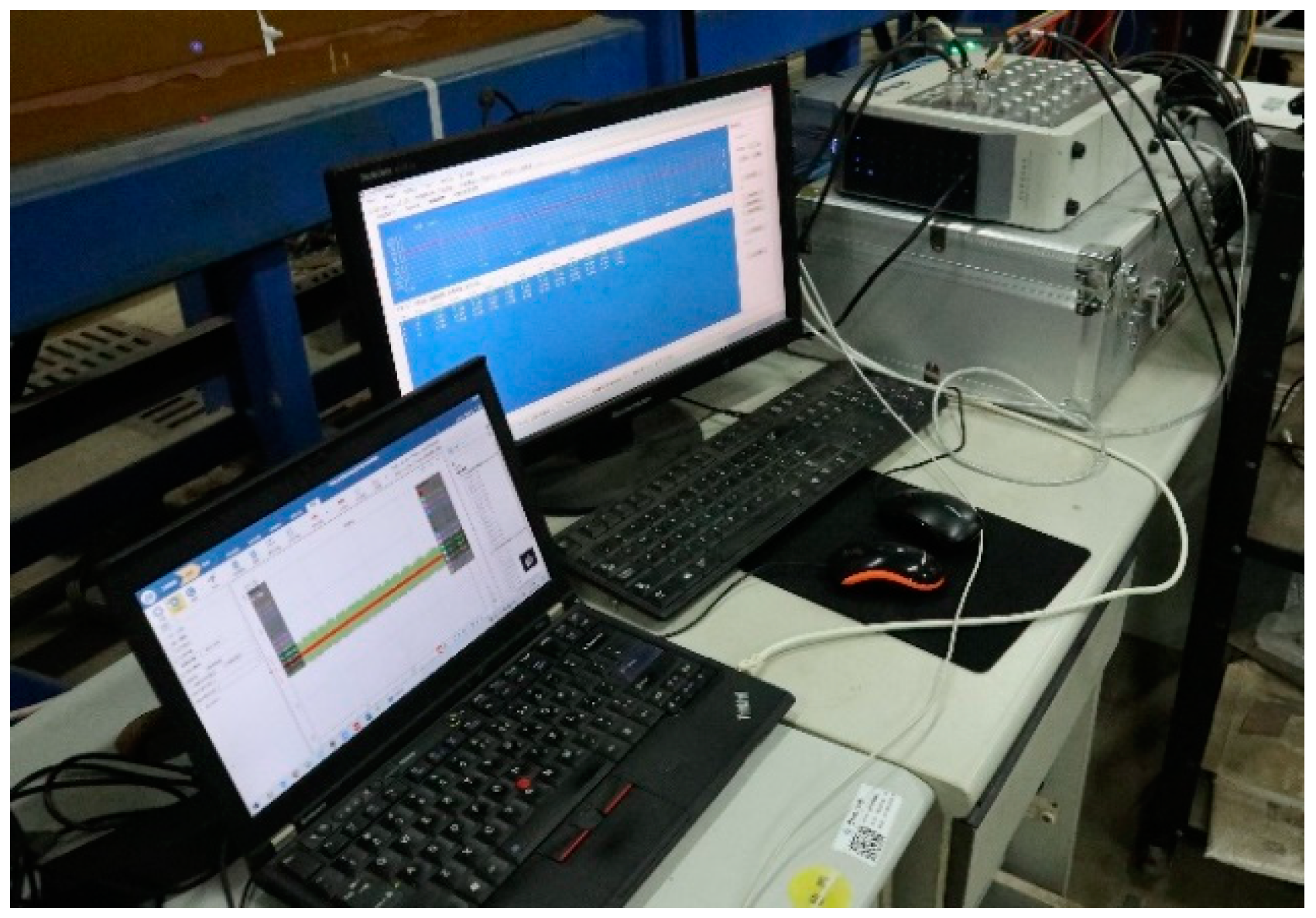
2.5. Data Collection System
3. Experimental Method
4. Natural Vibration Frequency
5. Dynamic Vibration Response of Riser Model
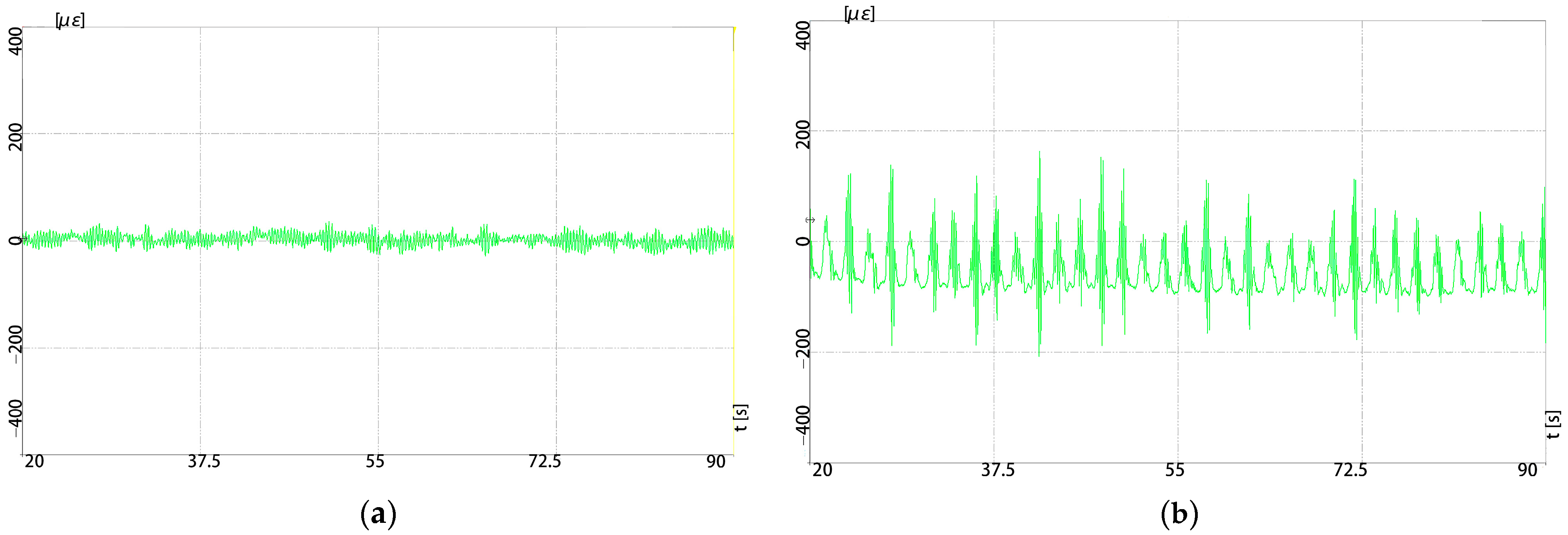
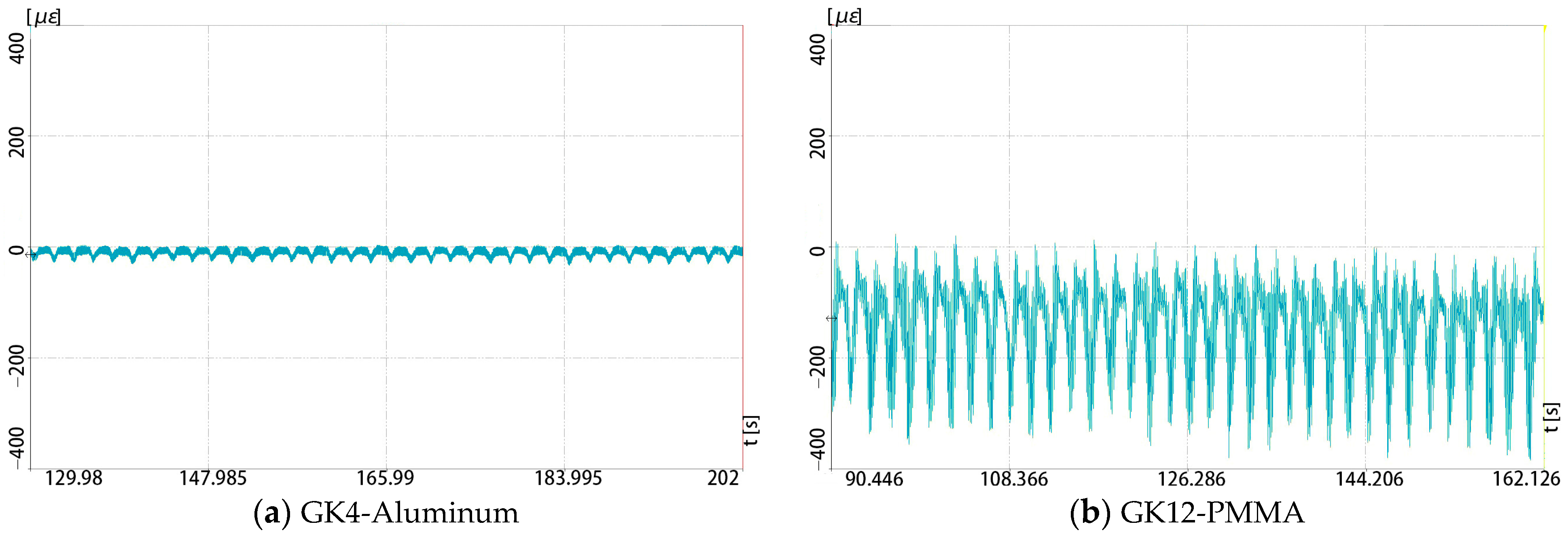
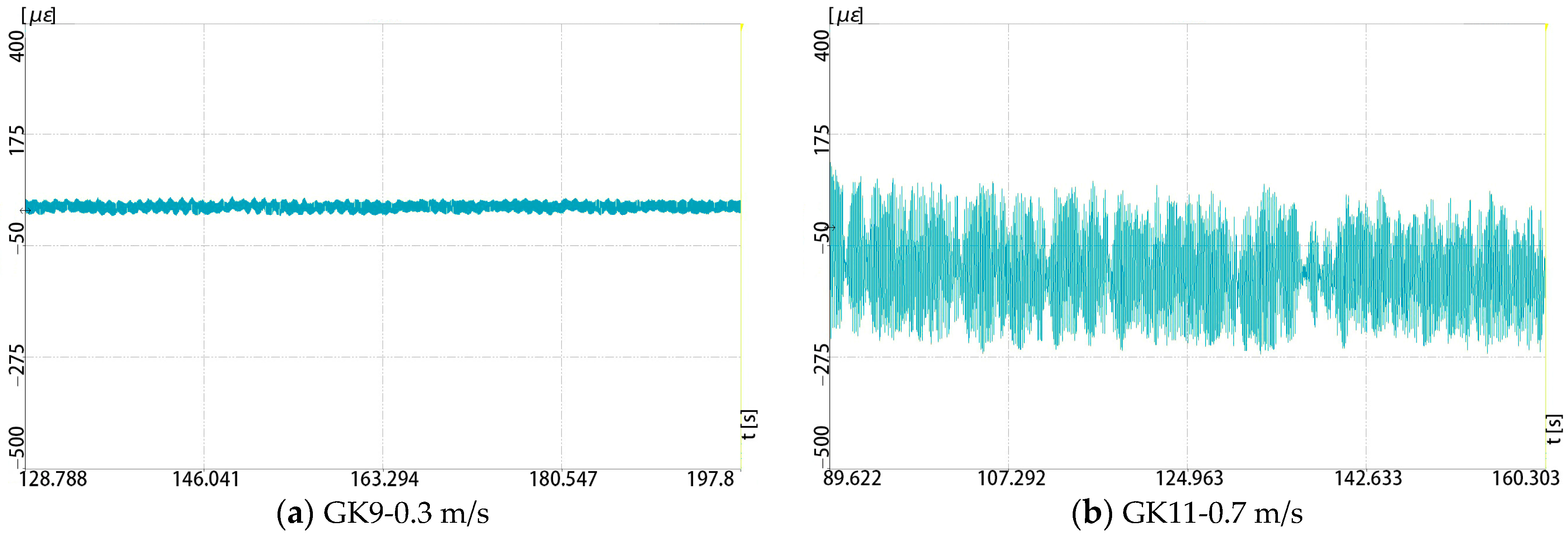
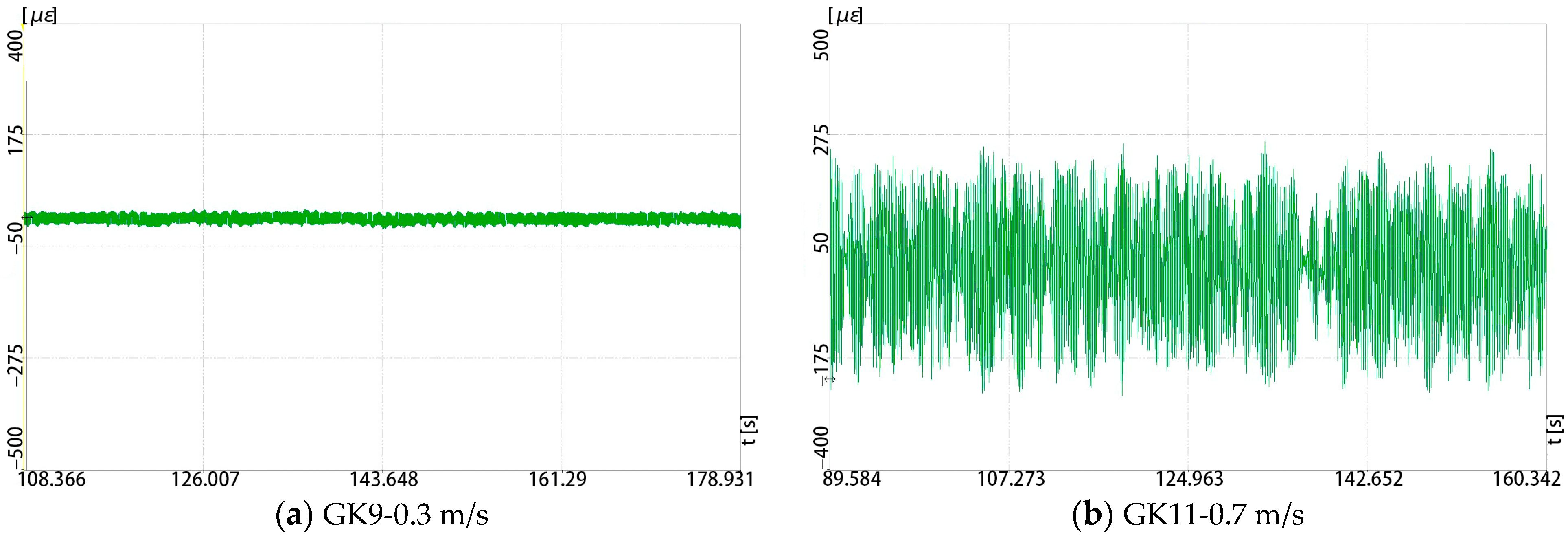
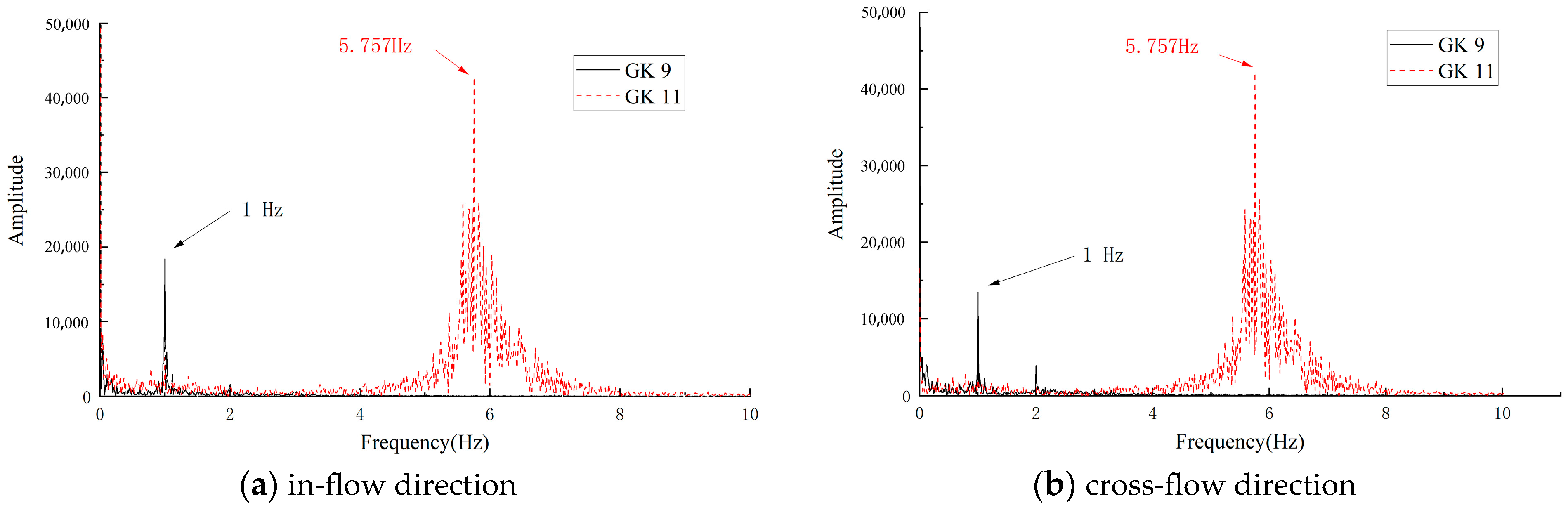
5.1. The Influence of the Elastic Modulus on the Vibration Amplitude and Involved Frequency of the Riser in the In-Flow and Cross-Flow Directions
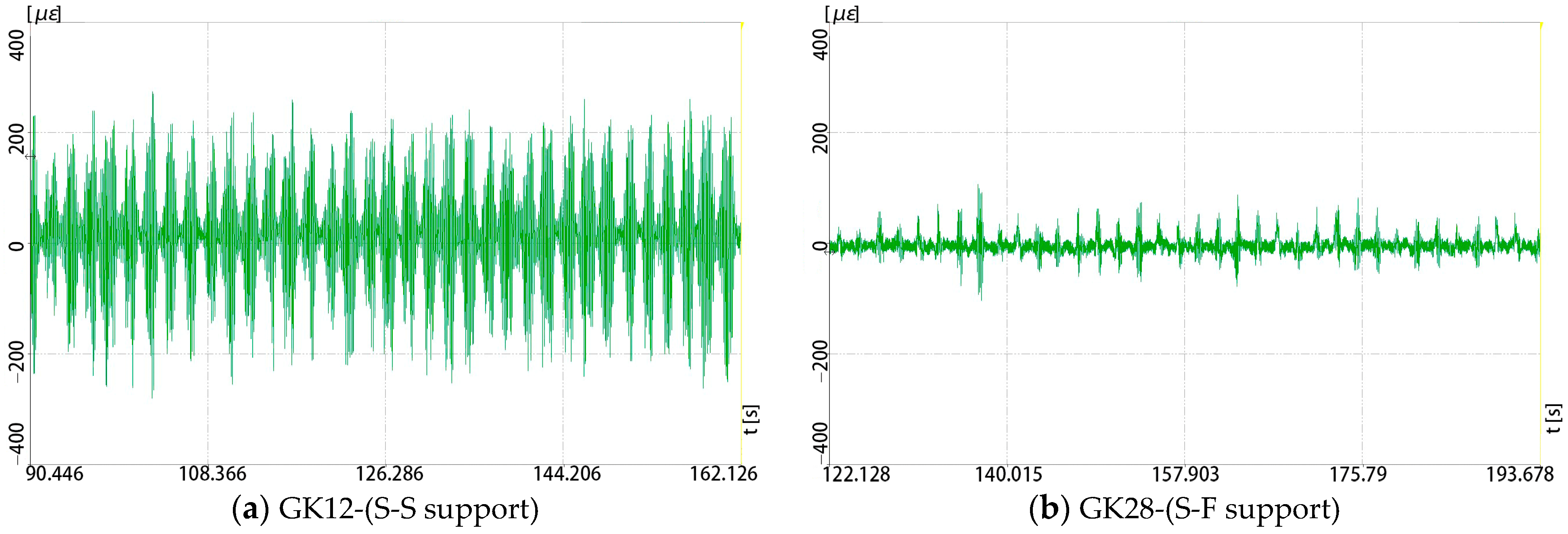
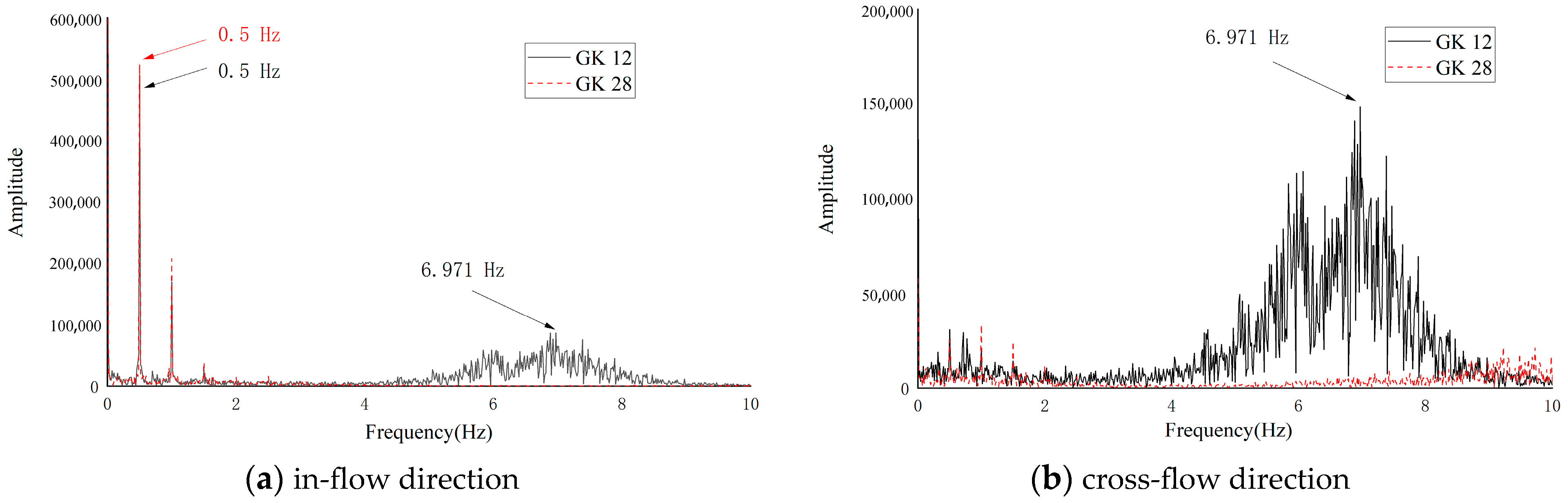
5.2. The Influence of the Boundary Conditions on the Vibration Amplitude and Involved Frequency of the Riser in the In-Flow and Cross-Flow Directions
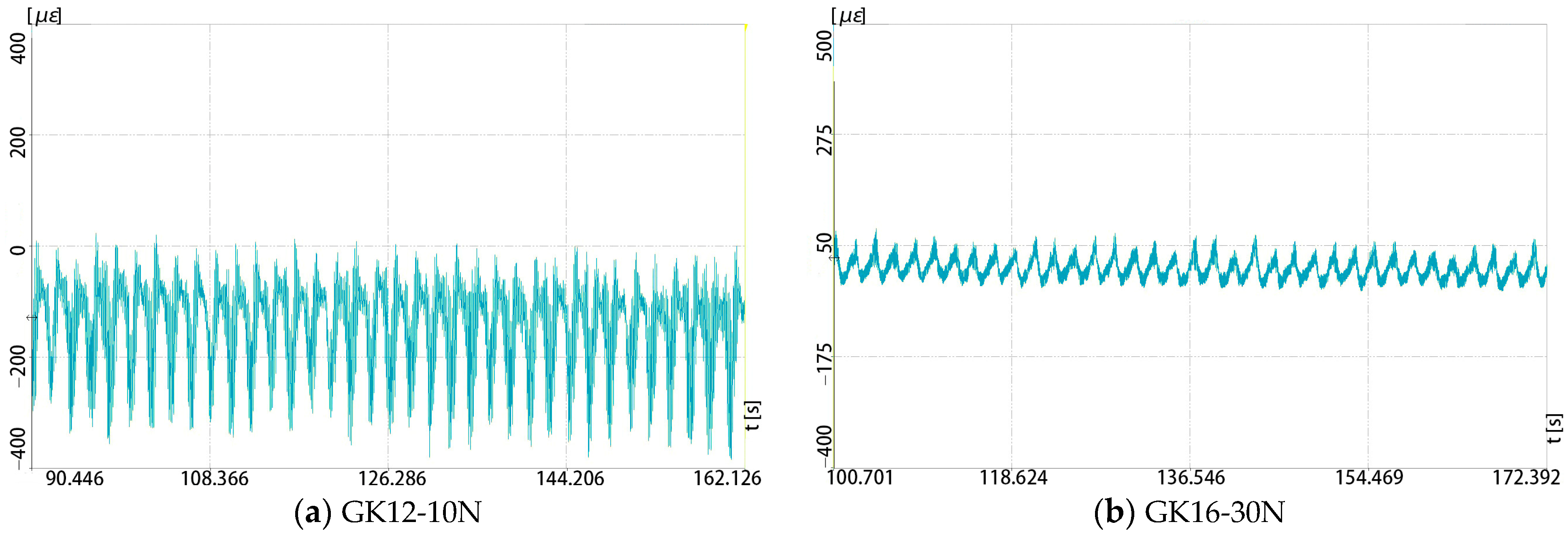
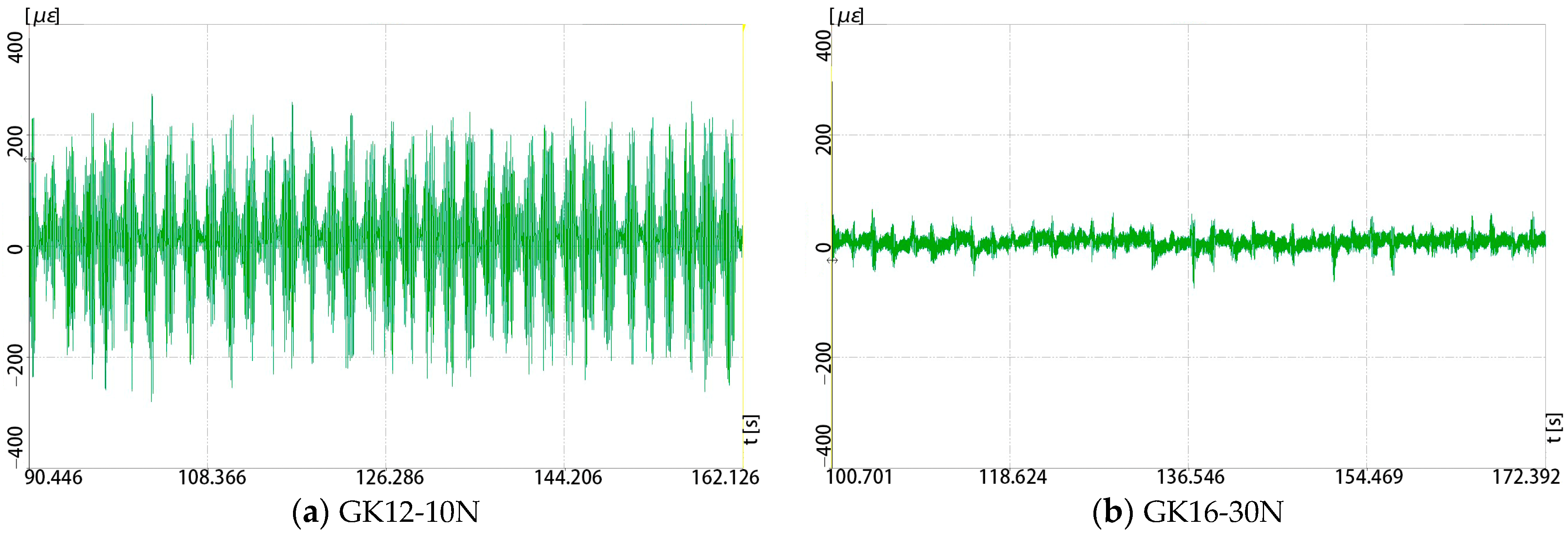
5.3. The Influence of Top Tensions on the Vibration Amplitude and Involved Frequency of the Riser in the In-Flow and Cross-Flow Directions
5.4. The Influence of Flow Velocities on the Vibration Amplitude and Involved Frequency of the Riser in the In-Flow and Cross-Flow Directions
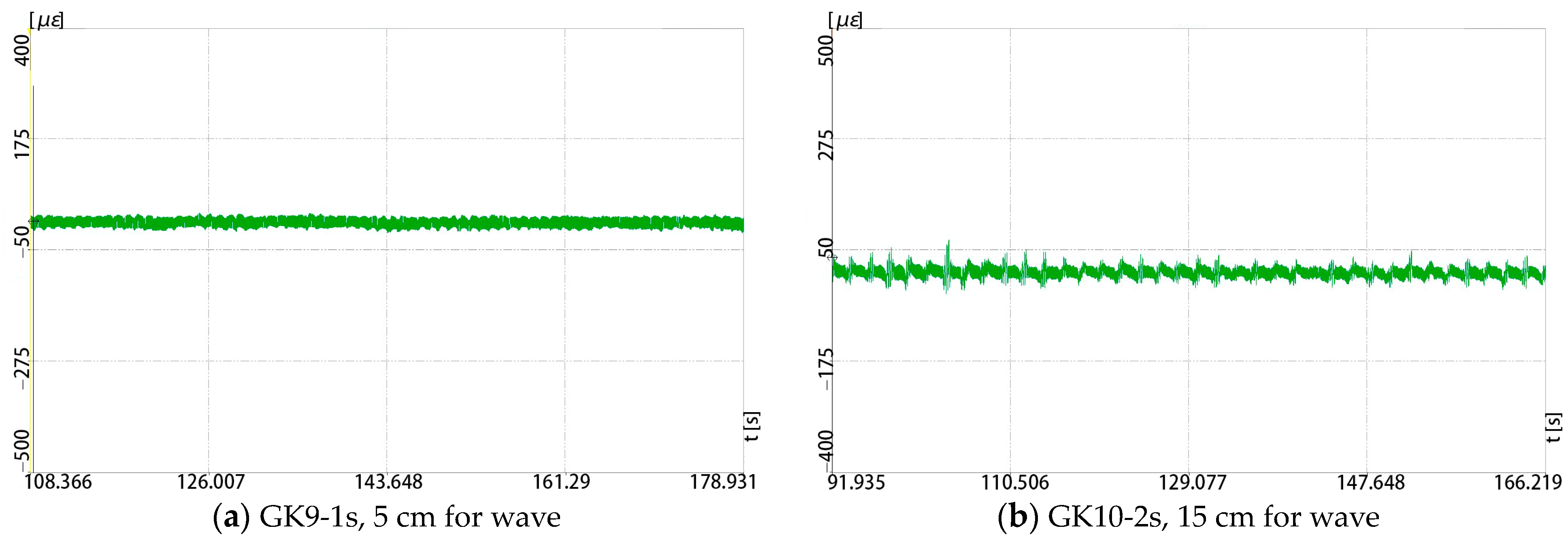
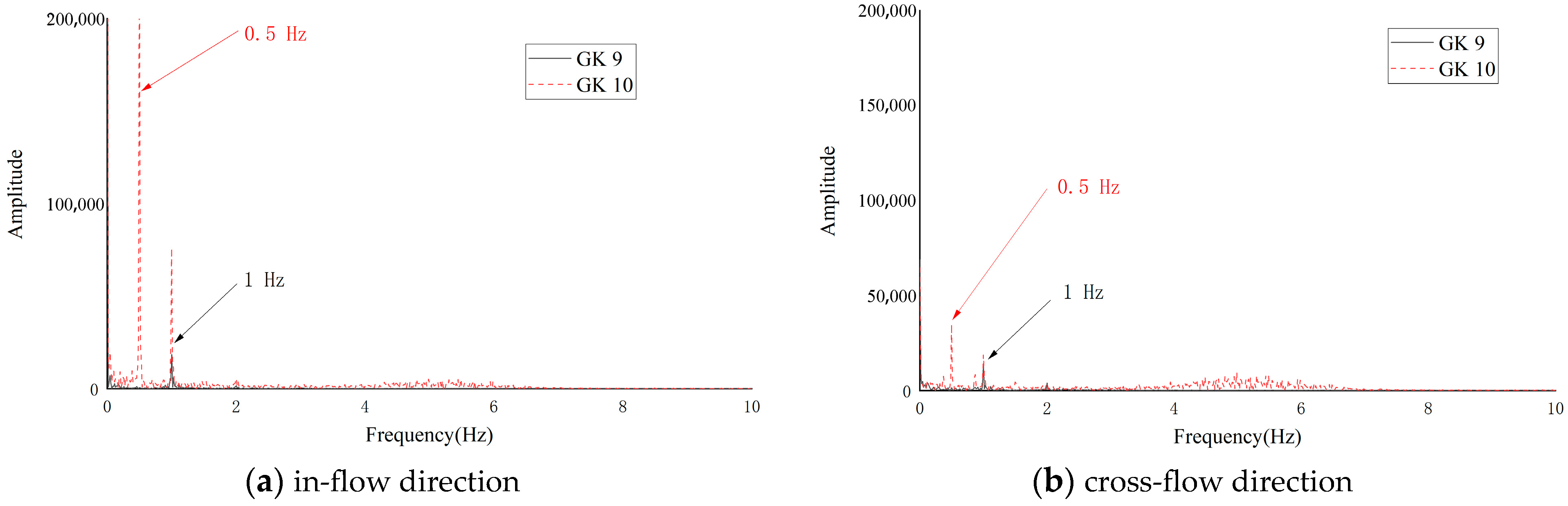
5.5. The Influence of Wave Parameters on the Vibration Amplitude and Involved Frequency of the Riser in the In-Flow and Cross-Flow Directions
6. Importance Calculation and Analysis
7. Conclusions
- Vibration amplitudes in both the in-flow and cross-flow directions are negatively correlated to the modulus, top tension force, and the number of constraints of the riser, while the other parameters are contrary.
- In-flow and cross-flow amplitudes are close to each other at low flow velocity, while the cross-flow amplitudes increase more significantly with the increase in flow velocity.
- When the other conditions are the same, the constraint number and the value of top tension directly affect whether obvious cross-flow vibration occurs at the same flow velocity.
- The vibration amplitude and frequency of the riser are affected by the wave factor. More specifically, the frequency of in-flow vibration is normally consistent with that of the wave, and the increase in the wave intensity will obviously lead to the increase in the vibration amplitude of the riser, especially for that of cross-flow vibration.
- The increase in flow velocity is an important factor for vortex-induced vibration of the riser. With the increase in flow velocity, the amplitude of the riser in both directions increases significantly.
- The sequences of importance for the vibration in the in-flow and cross-flow directions are b3 (flow velocity) > b6 (modulus) > b1 (number of constraints) > b2 (top tension force) > b5 (wave height) > b4 (wave period) and b3 (flow velocity) > b1 (number of constraints) > b6 (modulus) > b2 (top tension force) > b5 (wave height) > b4 (wave period), respectively.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhao, H.; Liu, X.; Bai, L. Development Status of Deepwater Offshore Oil Drilling Equipment. Oil Field Equip. 2010, 39, 68–74. [Google Scholar]
- Zhou, S.; Li, Q. Developing Marine Energy and Building a Marine Power. Sci. Technol. Rev. 2020, 38, 17–26. [Google Scholar]
- Ferguson, N.; Parkinson, G.V. Surface and wake flow phenomena of the vortex-excited oscillation of a circular cylinder. J. Eng. Ind. 1967, 89, 831–838. [Google Scholar] [CrossRef]
- Liu, G.; Li, H.; Qiu, Z.; Leng, D.; Li, Z.; Li, W. A mini review of recent progress on vortex induced vibrations of marine risers. Ocean. Eng. 2020, 195, 106704. [Google Scholar] [CrossRef]
- Ma, Y.; Xu, W.; Wu, H.; Wang, Q. Comparative Study on Vortex Induced Vibration Suppression Methods for Marine Risers. In Proceedings of the 31st National Hydrodynamics Symposium (Volume II); State Key Laboratory of Hydraulic Engineering Simulation and Safety: Tianjin, China, 2020; pp. 819–825. [Google Scholar]
- Yang, H.; Xiao, F. Instability analyses of a top-tensioned riser under combined vortex and multi-frequency parametric excitations. Ocean. Eng. 2014, 81, 12–28. [Google Scholar] [CrossRef]
- Li, W.; Zhou, X.; Sun, Y.; Duan, M. Application of variable tension transfer matrix method in modal analysis of marine riser. Shipbuild. China 2019, 60, 185–194. [Google Scholar]
- Zhang, Y.; Guo, H.; Meng, F.; Liu, X. Experimental study on vortex induced vibration law of top tension riser based on wavelet transform. J. Vib. Shock. 2011, 30, 149–154+185. [Google Scholar]
- Liu, J.; Guo, X.; Liu, Q.; Wang, G.; He, Y.; Li, J. Vortex induced vibration response characteristics of marine riser considering the coupling effect of forward and cross flow. Acta Pet. Sin. 2019, 40, 1270–1280. [Google Scholar]
- Li, Y.; Yang, X.; Guo, H.; Li, P. Research on design of offshore riser test support and its impact on vortex induced vibration. Ocean. Eng. 2013, 31, 31–37. [Google Scholar]
- Gao, Y.; Zhang, Z.; Zou, L.; Zong, Z.; Yang, B. Effect of boundary condition and aspect ratio on vortex-induced vibration response of a circular cylinder. Ocean. Eng. 2019, 188, 106244. [Google Scholar] [CrossRef]
- Yin, B.; Hu, Q.; Li, Y.; Wang, W.; Zhu, J.; Wang, D. Review on Vortex Induced Vibration Characteristics of Marine Risers. J. Ship Mech. 2022, 26, 1097–1109. [Google Scholar]
- Wu, Z.; Lu, Q.; Mei, G. Multi frequency parametric excitation vibration response of marine riser under combined action of random wave and eddy current. J. Ship Mech. 2020, 24, 599–610. [Google Scholar]
- Wang, C.; Cui, Y.; Ge, S.; Sun, M.; Jia, Z. Experimental Study on Vortex-induced Vibration of Risers Considering the Effects of Different Design Parameters. Appl. Sci. 2018, 8, 2411. [Google Scholar] [CrossRef]
- Ge, S.; Wang, C.; Sun, M.; Wang, Y. Three-dimensional computational fluid dynamics simulation of vortex induced vibration of fiber reinforced composite marine riser based on fluid structure interaction. J. Univ. Jinan (Sci. Technol.) 2020, 34, 1–9. [Google Scholar]
- Cui, Y.; Wang, C.; Chen, Z.; Sun, M. Experimental Study on Vortex Induced Vibration of Multi parameter Marine Risers Based on Grey Theory. Sci. Technol. Eng. 2018, 18, 207–213. [Google Scholar]
- Lou, M.; Qian, G. Experimental Design of Vortex Induced Vibration of Marine Risers. Res. Explor. Lab. 2020, 39, 59–62. [Google Scholar]
- Wang, C.; Shankar, K.; Morozov, E.V. Global design and analysis of deep sea FRP composite risers under combined environmental loads. Adv. Compos. Mater. 2017, 26, 79–98. [Google Scholar] [CrossRef]
- ABS (American Bureau of Shipping). Guide for Building and Classing Subsea Riser Systems: Design Requirements and Loads; American Bureau of Shipping: Houston, TX, USA, 2008. [Google Scholar]
- Wang, C.; Feng, Y. Optimal Design of Deepwater Fiber Composite Marine Risers; Geological Publishing House: Beijing, China, 2021. [Google Scholar]
- Cooley, J.W.; Tukey, J.W. An algorithm for the machine calculation of complex Fourier series. Math. Comput. 1965, 19, 297–301. [Google Scholar] [CrossRef]
- Aiken, L.S.; West, S.G.; Reno, R.R. Multiple Regression: Testing and Interpreting Interactions; Sage Publications: Newbury Park, CA, USA, 1991. [Google Scholar]
- Merriman, M. A Text-Book on the Method of Least Squares; John Wiley & Sons: New York, NY, USA, 1911. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Materials | Outer Diameter | Inside Dimension | Length | Density | Elasticity Modulus |
|---|---|---|---|---|---|
| (m) | (m) | (m) | (kg/m3) | (GPa) | |
| Aluminum | 0.02 | 0.016 | 1.25 | 3279 | 70 |
| PMMA | 0.02 | 0.016 | 1.25 | 1132 | 3.5 |
| No. | Materials | Boundary Conditions | Top Tension (N) | Flow Velocity (m/s) | Wave | No. | Materials | Boundary Conditions | Top Tension (N) | Flow Velocity (m/s) | Wave | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Period(s) | Wave Height (cm) | Period(s) | Wave Height (cm) | ||||||||||
| GK1 | Al | S-S | 10 | 0.3 | 1 | 5 | GK2 | Al | S-S | 10 | 0.3 | 2 | 15 |
| GK3 | Al | S-S | 10 | 0.7 | 1 | 5 | GK4 | Al | S-S | 10 | 0.7 | 2 | 15 |
| GK5 | Al | S-S | 30 | 0.3 | 1 | 5 | GK6 | Al | S-S | 30 | 0.3 | 2 | 15 |
| GK7 | Al | S-S | 30 | 0.7 | 1 | 5 | GK8 | Al | S-S | 30 | 0.7 | 2 | 15 |
| GK9 | PMMA | S-S | 10 | 0.3 | 1 | 5 | GK10 | PMMA | S-S | 10 | 0.3 | 2 | 15 |
| GK11 | PMMA | S-S | 10 | 0.7 | 1 | 5 | GK12 | PMMA | S-S | 10 | 0.7 | 2 | 15 |
| GK13 | PMMA | S-S | 30 | 0.3 | 1 | 5 | GK14 | PMMA | S-S | 30 | 0.3 | 2 | 15 |
| GK15 | PMMA | S-S | 30 | 0.7 | 1 | 5 | GK16 | PMMA | S-S | 30 | 0.7 | 2 | 15 |
| GK17 | Al | S-F | 10 | 0.3 | 1 | 5 | GK18 | Al | S-F | 10 | 0.3 | 2 | 15 |
| GK19 | Al | S-F | 10 | 0.7 | 1 | 5 | GK20 | Al | S-F | 10 | 0.7 | 2 | 15 |
| GK21 | Al | S-F | 30 | 0.3 | 1 | 5 | GK22 | Al | S-F | 30 | 0.3 | 2 | 15 |
| GK23 | Al | S-F | 30 | 0.7 | 1 | 5 | GK24 | Al | S-F | 30 | 0.7 | 2 | 15 |
| GK25 | PMMA | S-F | 10 | 0.3 | 1 | 5 | GK26 | PMMA | S-F | 10 | 0.3 | 2 | 15 |
| GK27 | PMMA | S-F | 10 | 0.7 | 1 | 5 | GK28 | PMMA | S-F | 10 | 0.7 | 2 | 15 |
| GK29 | PMMA | S-F | 30 | 0.3 | 1 | 5 | GK30 | PMMA | S-F | 30 | 0.3 | 2 | 15 |
| GK31 | PMMA | S-F | 30 | 0.7 | 1 | 5 | GK32 | PMMA | S-F | 30 | 0.7 | 2 | 15 |
| Materials | No Water | In Water | ||
|---|---|---|---|---|
| S-S (Hz) | S-F (Hz) | S-S (Hz) | S-F (Hz) | |
| Al | 22.302 (T = 10 N) | 30.769 (T = 10 N) | 19.302 (T = 10 N) | 24.626 (T = 10 N) |
| 24.126 (T = 30 N) | 31.818 (T = 30 N) | 22.126 (T = 30 N) | 28.572 (T = 30 N) | |
| PMMA | 8.219 (T = 10 N) | 14.085 (T = 10 N) | 6.612 (T = 10 N) | 10.322 (T = 10 N) |
| 9.231 (T = 30 N) | 15.000 (T = 30 N) | 7.595 (T = 30 N) | 10.989 (T = 30 N) | |
| Materials | Tension Force (N) | Boundary Condition | friser (Hz) | Flow Velocity (m/s) | Re | St | fs (Hz) | Ur |
|---|---|---|---|---|---|---|---|---|
| Al | 10 | S-S | 19.302 | 0.3 | 5660.4 | 0.21 | 3.15 | 0.78 |
| 30 | S-S | 22.126 | 0.3 | 5660.4 | 0.21 | 3.15 | 0.68 | |
| 10 | S-F | 24.626 | 0.3 | 5660.4 | 0.21 | 3.15 | 0.61 | |
| 30 | S-F | 28.572 | 0.3 | 5660.4 | 0.21 | 3.15 | 0.52 | |
| 10 | S-S | 6.612 | 0.3 | 5660.4 | 0.21 | 3.15 | 2.27 | |
| 30 | S-S | 7.595 | 0.3 | 5660.4 | 0.21 | 3.15 | 1.97 | |
| 10 | S-F | 10.322 | 0.3 | 5660.4 | 0.21 | 3.15 | 1.45 | |
| 30 | S-F | 10.989 | 0.3 | 5660.4 | 0.21 | 3.15 | 1.37 | |
| PMMA | 10 | S-S | 19.302 | 0.7 | 13,207.5 | 0.21 | 7.35 | 1.81 |
| 30 | S-S | 22.126 | 0.7 | 13,207.5 | 0.21 | 7.35 | 1.58 | |
| 10 | S-F | 24.626 | 0.7 | 13,207.5 | 0.21 | 7.35 | 1.42 | |
| 30 | S-F | 28.572 | 0.7 | 13,207.5 | 0.21 | 7.35 | 1.22 | |
| 10 | S-S | 6.612 | 0.7 | 13,207.5 | 0.21 | 7.35 | 5.29 | |
| 30 | S-S | 7.595 | 0.7 | 13,207.5 | 0.21 | 7.35 | 4.61 | |
| 10 | S-F | 10.322 | 0.7 | 13,207.5 | 0.21 | 7.35 | 3.39 | |
| 30 | S-F | 10.989 | 0.7 | 13,207.5 | 0.21 | 7.35 | 3.19 |
| No. | Materials | Boundary Condition | friser (Hz) | Flow Velocity(m/s) | Wave | Ur |
|---|---|---|---|---|---|---|
| 1 | PMMA | S-S without tension | 6.2 | 0.4 | none | 3.22 |
| 2 | PMMA | S-S without tension | 6.2 | 0.4 | 15 cm, 2 s | 3.22 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, R.; Wang, C.; He, W.; Zhang, Z.; Ma, K.; Ren, M. The Experimental Study of Dynamic Response of Marine Riser under Coupling Effect of Multiparameter. J. Mar. Sci. Eng. 2023, 11, 1787. https://doi.org/10.3390/jmse11091787
Zheng R, Wang C, He W, Zhang Z, Ma K, Ren M. The Experimental Study of Dynamic Response of Marine Riser under Coupling Effect of Multiparameter. Journal of Marine Science and Engineering. 2023; 11(9):1787. https://doi.org/10.3390/jmse11091787
Chicago/Turabian StyleZheng, Run, Chunguang Wang, Wentao He, Zhenyang Zhang, Keshun Ma, and Mengqi Ren. 2023. "The Experimental Study of Dynamic Response of Marine Riser under Coupling Effect of Multiparameter" Journal of Marine Science and Engineering 11, no. 9: 1787. https://doi.org/10.3390/jmse11091787
APA StyleZheng, R., Wang, C., He, W., Zhang, Z., Ma, K., & Ren, M. (2023). The Experimental Study of Dynamic Response of Marine Riser under Coupling Effect of Multiparameter. Journal of Marine Science and Engineering, 11(9), 1787. https://doi.org/10.3390/jmse11091787