Abstract
The floating photovoltaic (FPV) array, which consists of tens or hundreds of rows of floating photovoltaic systems, exhibits great economic and environmental benefits. An FPV array arranged in the ocean will be subjected to the combined action of wind, waves, and currents during the installation, service, and maintenance processes; however, systematic research in this field is still lacking. As a representative of the FPV array, this study on the hydrodynamic characteristics of a single-row FPV system is a fundamental prerequisite for the safe design of large-scale FPV arrays in the near future. In this paper, based on the potential theory, a numerical model of a single-row FPV system with ten floating platforms is established with ANSYS-AQWA software. Following this, the hydrodynamic coefficients of a single floating platform are calculated and evaluated. After that, the dynamic responses of the FPV system under different load combinations are explored. Finally, the influence mechanism of wave parameters on the hydrodynamic characteristics of the FPV system is discussed in detail, including the wavelength and wave height. The results indicate that, within the scope of this study, the floating platforms have good seakeeping and stability. The wave load dominates for all conditions, and the presence of the current will affect the parameters of the wave. In addition, the relative relationship between the wavelength and the length of FPV system will affect their resonance effect, and the increase in wave height will significantly enhance the dynamic response of the FPV system. This study can help to provide references for the safety design of FPV arrays.
1. Introduction
To reduce the use of fossil fuels and protect the environment, it is urgent to vigorously develop clean energy such as solar energy. At present, terrestrial photovoltaic (PV) energy faces many problems, such as the loss of agricultural land due to the high demand for land area, the abandonment of light due to the large distance from the load center, and the system risk to the power grid due to the distributed photovoltaic energy [1]. On the contrary, the development of floating photovoltaic (FPV) technology in the ocean is very advantageous for overcoming the above problems, and it provides a method to optimize the energy structure for the high electricity demand in economically developed coastal areas.
The FPV array consists of floating platforms, PV modules, connectors, mooring systems, and related electrical components [2]. Compared to terrestrial PV, the cooling effect of water can effectively reduce the service temperature of the PV modules, which increases the energy conversion efficiency and, thus, outputs more electricity [3]. For example, the FPV array arranged in the Straits of Johor, with an area of 5 hectares, is expected to generate 6.02 million kWh of electricity per year, which is about the annual electricity consumption of 1380 four-roomed HDB flats, while reducing the carbon emissions by close to 4258 ton [4]. It can be seen that FPV technology has great economic and environmental benefits. It should be noted that the composition of ocean loads is complex, and the continuous action of wind, waves, and currents will pose great challenges to the safe service of the FPV array. In 2019, an FPV power station in Japan was damaged by a hurricane, and a fire was triggered [5]. To prevent further accidents, it is crucial to study the hydrodynamic characteristics of FPV arrays under ocean loads. In recent years, a series of effective studies have been carried out, one after another.
In the field of wind load, Choi et al. [6] and Bei et al. [7] measured the distribution of wind loads within a PV array. The results show that, due to the shielding effect of the outer structures, the wind loads acting on the structures located in the middle of the PV array are significantly reduced, and the influence gradually weakens and tends to stabilize as the number of rows increases. Wood et al. [8] and Warsido et al. [9] investigated the effects of transverse and longitudinal spacing between structures on the wind loads acting on PV panels, and the results indicated that the transverse spacing has little effect on the wind loads, while the increase in longitudinal spacing will lead to an increase in wind loads. The studies by Shademan et al. [10], Bitsumlak et al. [11], and Jubayer et al. [12] indicated that PV panels will withstand greater drag and lift when the incident wind is parallel to the array direction. Aly et al. [13] explored the influence of PV panel dimensions on the wind loads and found that there is no obvious relationship between average wind load and PV panel dimension, while the peak wind load is significantly affected. The research of Choi et al. [5] revealed that the lift and drag on PV panels gradually increased with the turbulence intensity. In addition, the numerical study of Honaryar et al. [14] indicated that the wind load on an FPV array is 458% higher than that on a terrestrial PV array of the same scale. Therefore, the interaction between water and wind is extremely important.
In the field of wave load, Ikhenniche et al. [15] calculated the total loads on the FPV system in three environments and found that wind dominates in inland water, while waves contributes significantly in the ocean. Kim et al. [16] analyzed the hydrodynamic characteristics of the FPV array under waves with different incident angles, and the results showed that the mooring forces reach the maximum when the wave direction coincides with the mooring direction. Lee et al. [17] obtained the distribution of wave loads within the FPV array by numerical simulation, and the results showed that the minimum occurs at the corner, while the maximum occurs at the front and rear of the FPV array. In the study of Song et al. [18], the influences of the arrangement angle of the FPV array, the dimensions of floating structures, and the axial stiffness of tensioned mooring lines on the supporting frames were examined. The results showed that the overall stiffness of the FPV array is mainly controlled by the mooring stiffness. Song et al. [19] compared the effects of a fixed connection and a hinged connection on the dynamic response of the FPV array under wave conditions, and the results indicated that the fixed connection can effectively reduce the mooring forces. Al-Yacouby et al. [20] and Friel et al. [21] carried out parametric studies on the dynamic response of the single horizontal cylindrical floating platform under the action of regular and irregular waves, including the immersion depth, diameter of the pontoon, wave height, and wave period. Gharechae et al. [22] proposed a semi-analytical method for solving the vertical acceleration of an elastic circular floating system, and the research indicated that, as the wave number increases, the hydroelastic interactions between the floating structures become increasingly significant. Zhang et al. [23] systematically investigated the influence of module number, external constraint, and internal hinge on the motion of the array. The study by Wang et al. [24] indicates that modular floating structures can effectively attenuate incident waves when the wave has a short period. In addition, the action mechanism of the current load is similar to that of the wind load, but the presence of the current will affect the characteristics of the wave load. Currently, there is a lack of research on the action mechanism of current on the FPV array.
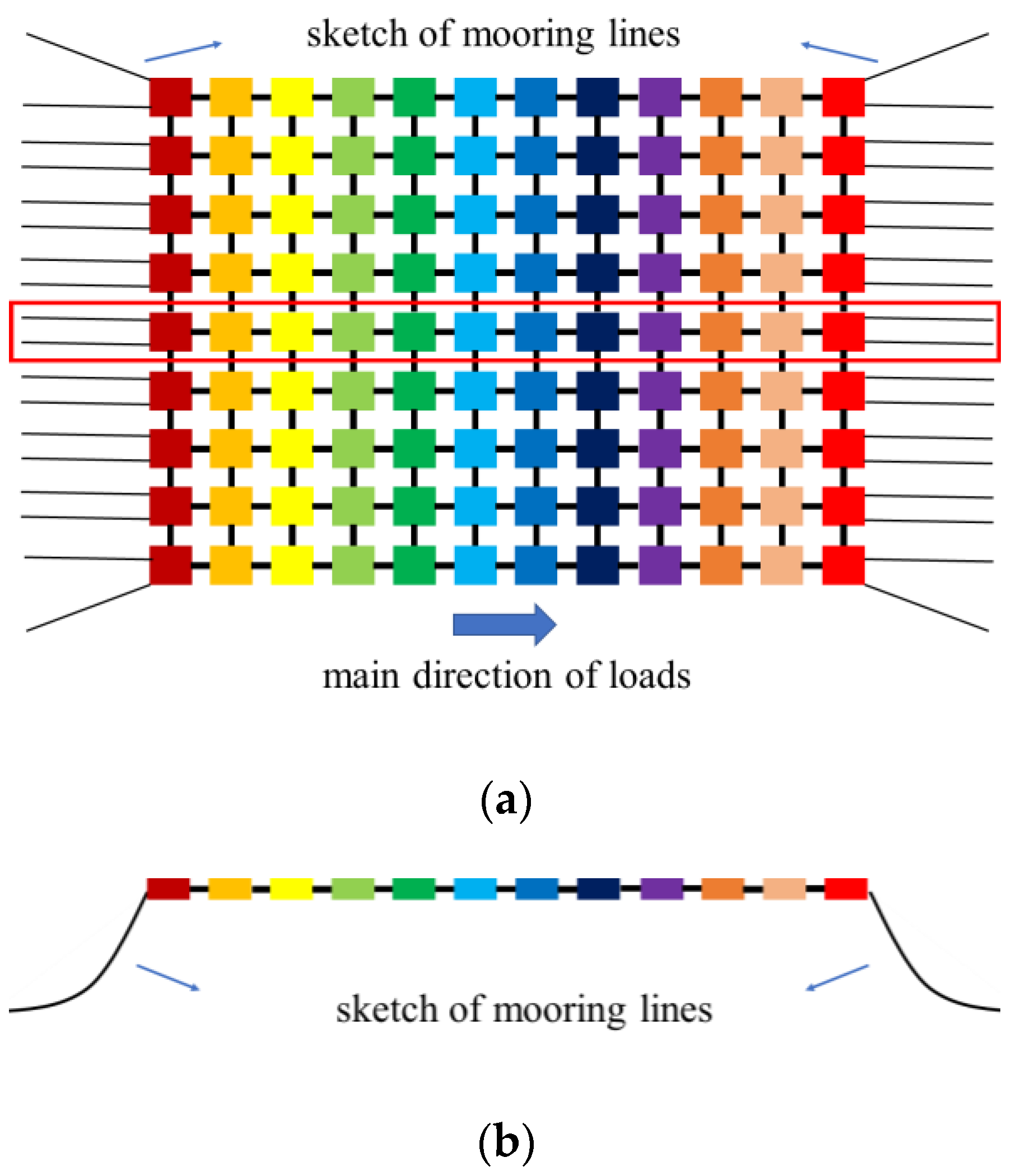
In summary, the existing research focuses mostly on the hydrodynamic characteristics of an FPV array under one single load; however, in engineering, wind, waves, and currents often exist simultaneously. In addition, the study should be based on the entire FPV array rather than a single PV panel [20,21]. At present, there is a lack of research in this field. On the other hand, existing studies have shown that the FPV array is subjected to the maximum force when the direction of loads is parallel to the FPV array [10,11,12,16]. In this case, it could be expected that the dynamic response mechanism of each row of the FPV system located in the middle part of the FPV array (Figure 1a) is similar, and the transverse force is significantly smaller than the longitudinal force within the FPV array. Therefore, the single-row FPV system, located in the middle part of the FPV array (marked with a red block in Figure 1a), can be selected as the simplified research object. In this study, based on the potential theory, a numerical model of a single-row FPV system with ten floating platforms is established using the software ANSYS-AQWA. Following this, the hydrodynamic coefficients of a single floating platform are calculated and evaluated. After that, the dynamic responses of the FPV system under different load combinations are explored. Finally, the influence mechanism of wave parameters on the hydrodynamic characteristics of the FPV system is discussed in detail, including the wavelength and wave height. This study explores the dynamic response mechanism of the FPV system under typical ocean loads, which can provide useful guidance for the safety design of the FPV system.
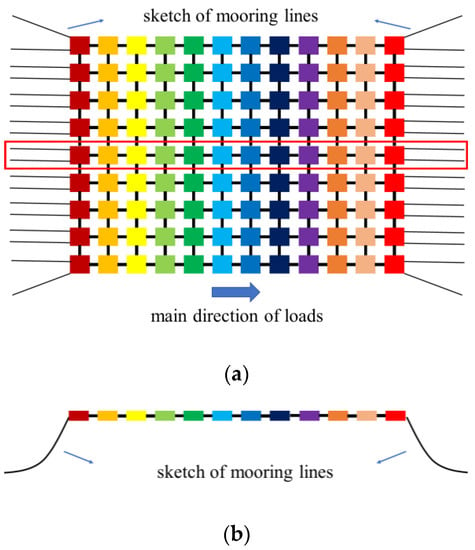
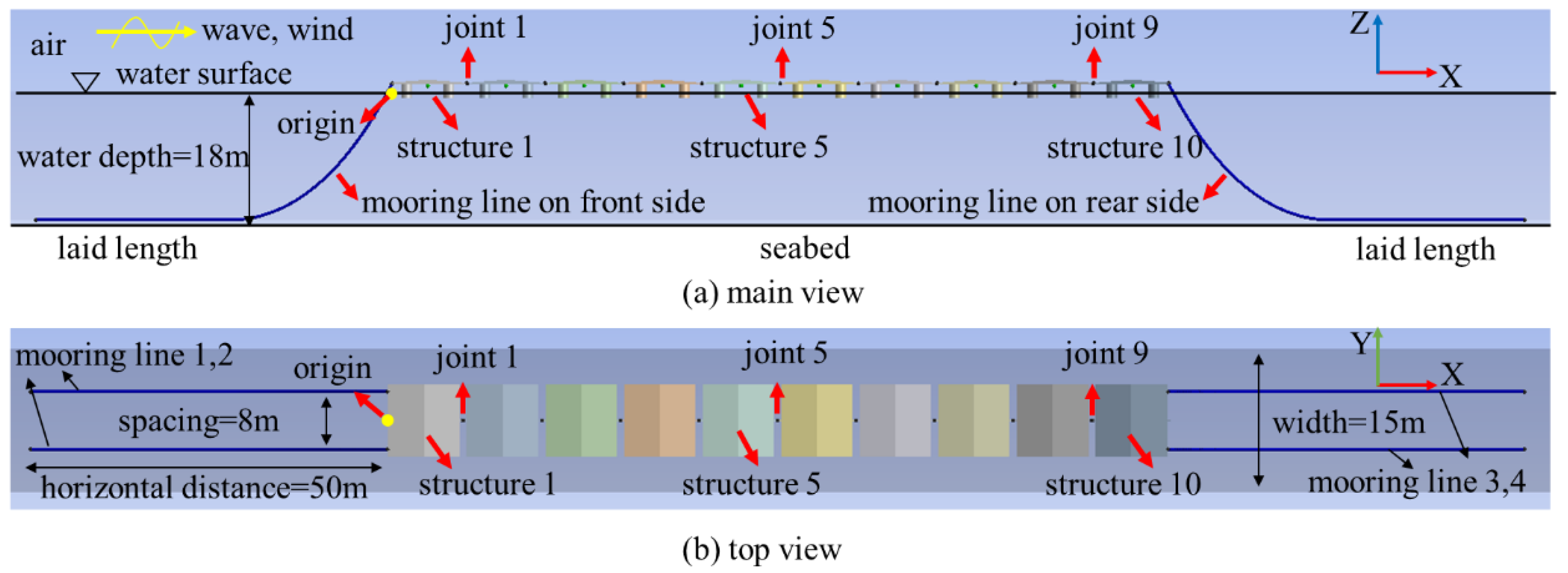
Figure 1.
Sketch of offshore FPV array, (a) top view (b) main view.
2. Numerical Method and Validation
As a commonly used hydrodynamic software in ocean engineering, ANSYS-AQWA (Zhengzhou, China, PERA GLOBAL Company, with version number V150) is often used to solve the problems of motion response, mooring positioning, and wave transfer under ocean loads. In addition, some studies, such as Nallayarasu and Kumar [25], and Rahmdel et al. [26], have shown that the calculation results of ANSYS-AQWA are in good agreement with the experimental results. Therefore, ANSYS-AQWA software is selected in this study to simulate the dynamic response of the FPV system under ocean loads.
2.1. Theoretical Background
2.1.1. Wave Load
In AQWA, the calculation of wave loads acting on large-scale floating structures is based on the potential theory. It is assumed that the fluid is uniform and incompressible, and the viscosity is ignored. Moreover, the fluid moves in the gravity field and the motion is irrotational. The total velocity potential in the flow field can be divided into incident potential , diffraction potential , and radiation potential .
The related velocity potential can be solved by Laplace’s equation. To ensure the uniqueness of the solution, some boundary conditions need to be considered.
where h is the water depth (water surface is the reference plane in z-direction), n is the outward unit vector normal to the structure boundary, and ν is the velocity vector of displacement of the structure.
After obtaining the corresponding velocity potential, the linearized Bernoulli equation can be used to obtain the pressure distribution on the wet surface of floating structures, and, finally, the wave forces can be obtained. is the still water resilience force, is the Froude–Krylov force, is the diffraction wave force, is the radiation wave force.
According to Newton’s second law of motion, the motion equations of a floating structure in six degrees of freedom can be expressed as Equation (9). is the connection force and mooring force.
2.1.2. Wind and Current Load
The wind in the ocean is extremely complex, varying with height, temperature, and time. In engineering, the calculation of wind load is often simplified as the average wind speed over a period of time. In addition, the FPV system is composed of multiple floating platforms connected through connectors in this study, and the shielding effect of the floating platforms on the front side cannot be ignored. The action mechanism of the current load is similar to that of the wind load. Therefore, the wind load and current load on the floating platform can be expressed as Equation (10). In AQWA, the wind/current coefficient is introduced, as shown in Equation (11).
where is the density of air or water, and are the polar drag and sheltering coefficient, respectively, is the projected area of the structure (above the water line for wind, below the water line for current), and is the wind speed and current speed.
2.2. Numerical Model Setup and Validation
2.2.1. Design Method
The offshore FPV array is composed of multiple floating platforms connected through flexible connectors, and the floating platforms are expanded into a large-scale array that is anchored by the mooring system floating on the sea. Finally, the FPV array forms a flexible system as a whole, which can float up and down with waves and have a certain drift with the current. In this study, a single-row FPV system with ten floating platforms is selected as the simplified research object, and the ocean loads are parallel to the FPV system.
- (1)
- Environmental loads
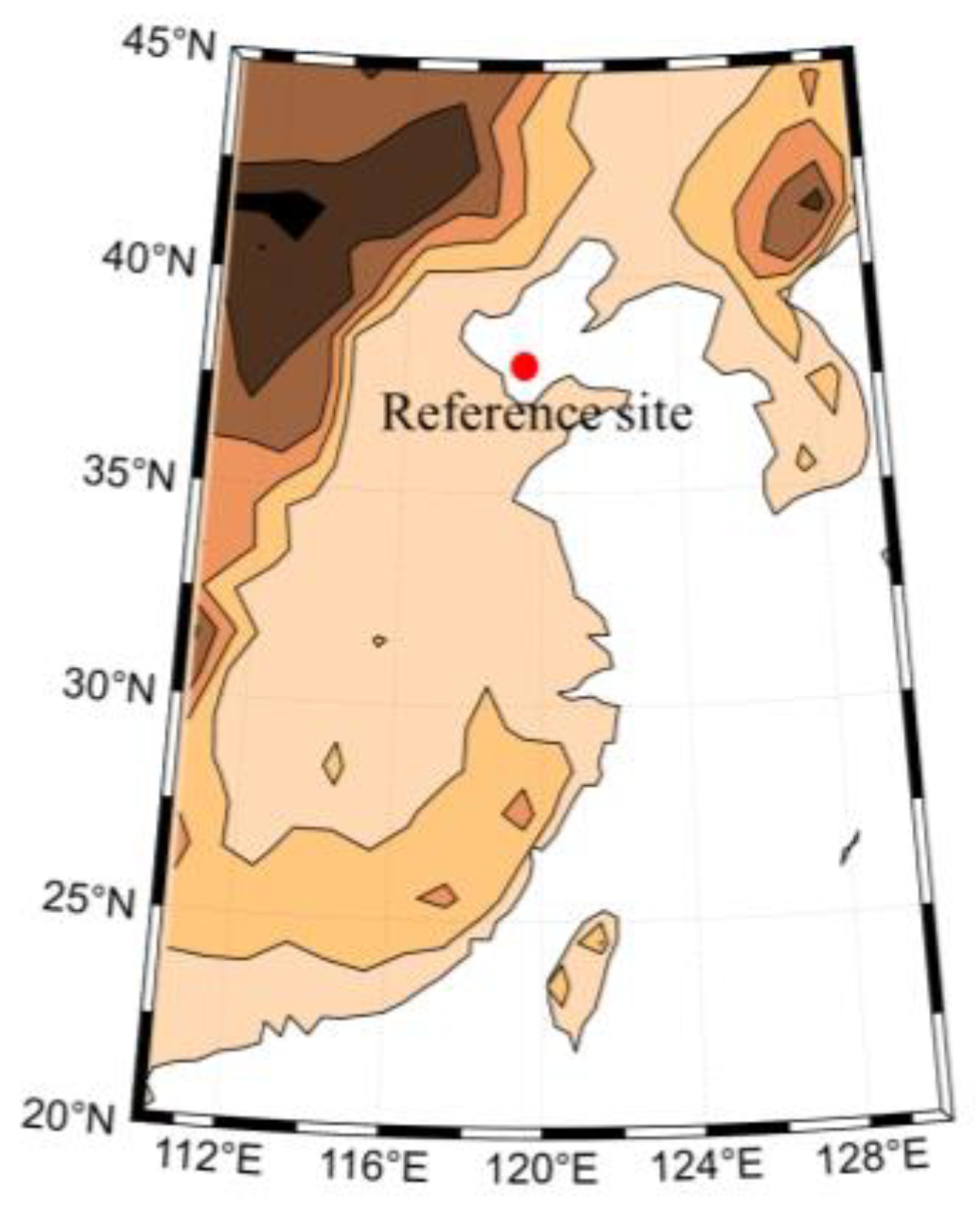
The environmental loads in this study (Table 1) are based on the hydrological conditions of Laizhou Bay in the south of Bohai Sea in Shandong Province, China, and the specific reference site is shown in the red solid circle in Figure 2. The required data to estimate the hydrological conditions in this area were obtained from the ECMWF’s reanalysis datasets for over 40 years (January 1983 onwards). Laizhou Bay is a strategic geographical area with rich oil and gas resources and is connected to the Yellow River, China’s second-longest river. In addition, the sea floor is relatively flat, which greatly facilitates the development of ocean renewable energy.

Table 1.
Environmental loads.
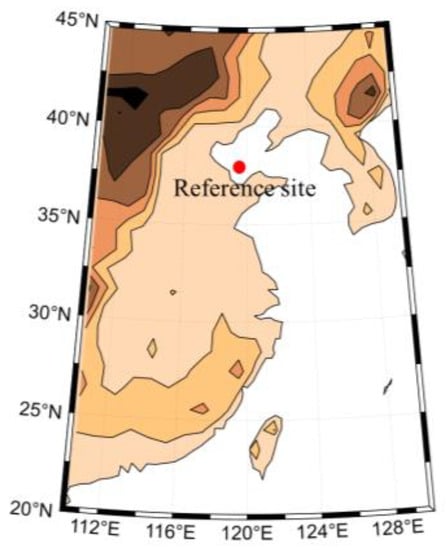
Figure 2.
Geographical location of Laizhou Bay.
- (2)
- Floating platforms
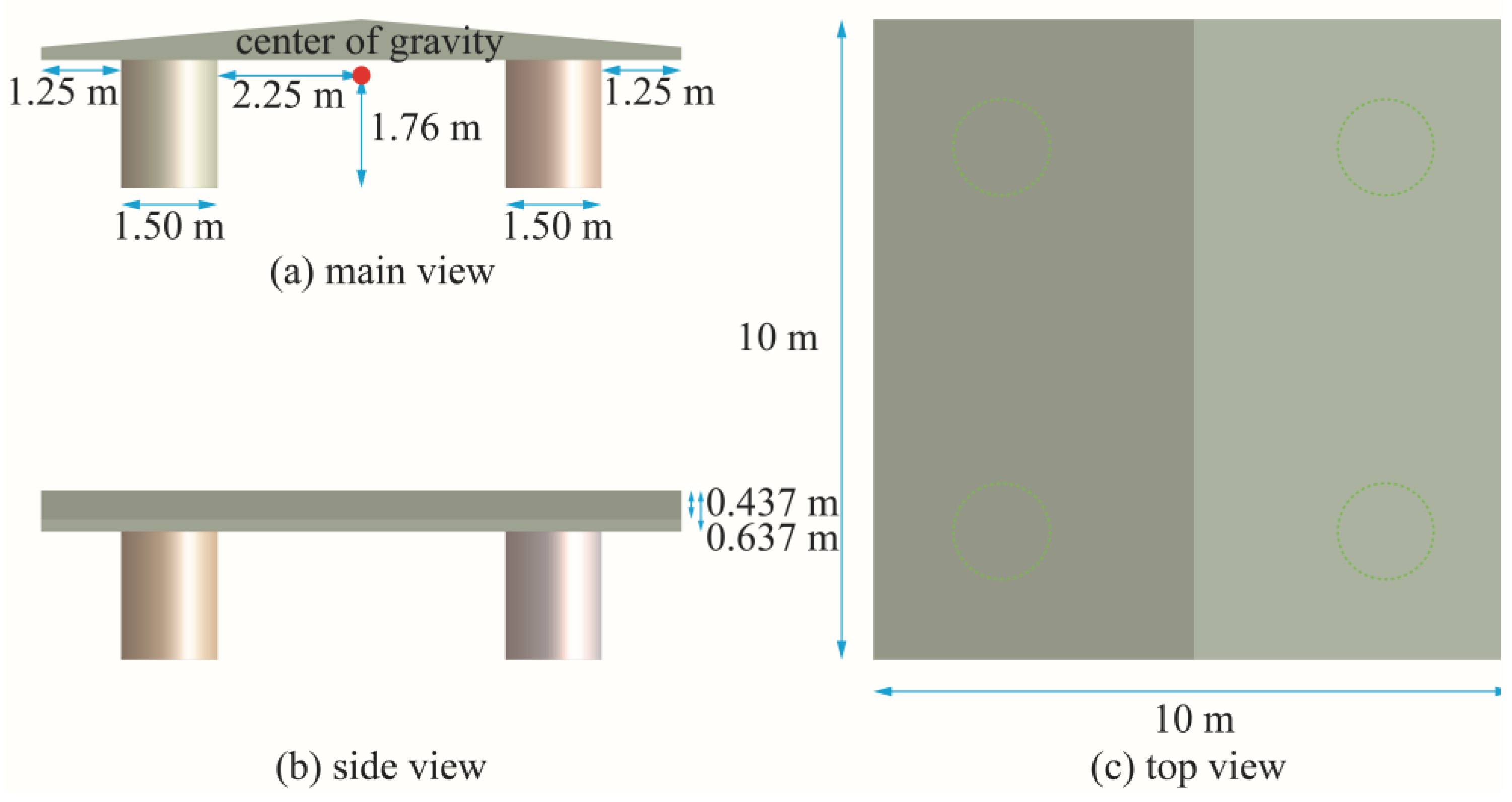
In this study, following the relevant research, a single floating platform is proposed and shown in Figure 3, which consists of four identical vertical cylindrical pontoons and a steel frame. The floating platform is made of steel plates that are reinforced by stiffening ribs, and its interior is hollow and filled with light foam (to prevent water from entering in case of cracking). The upper parts of the pontoons are welded into a hole through a steel frame. Unlike the traditional frame-type platform, the PV panels are arranged diagonally in a single direction, the steel frame is made into an arch structure with a certain angle, and the flexible PV modules are attached to both sides of the steel frame, which can not only reduce the wind load acting on the PV panels but also ensure that the seawater can be discharged in time to avoid the prolonged contact between PV panels and seawater. The material of carbon steel (with a density of 7858.00 kg/m3) is used in this study, the thickness of the steel frames is set to 2.5 mm, and the thickness of the pontoons is set to 6.0 mm. Accordingly, the detailed parameters for a floating platform, i.e., mass, center of gravity, and mass moment of inertia relative to its center of gravity, could be calculated, as shown in Table 2. Based on this design, the drag and sheltering coefficients of floating platforms under wind and currents are selected from DNVGL-RP-C205 [27], and Roussinova and Balachandar [28], and shown in Table 3, Table 4 and Table 5.
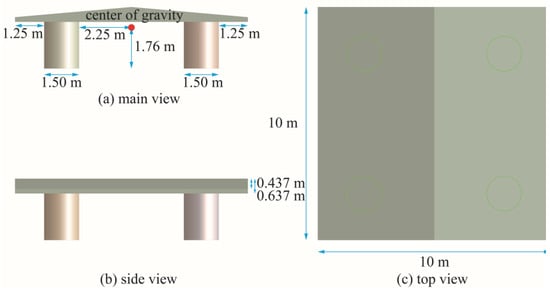
Figure 3.
Three views of the floating platform.
Table 2.
Parameters for a floating platform.
Table 3.
Drag coefficients.
Table 4.
Wind load sheltering coefficients.
Table 5.
Current load sheltering coefficients.
- (3)
- Connectors
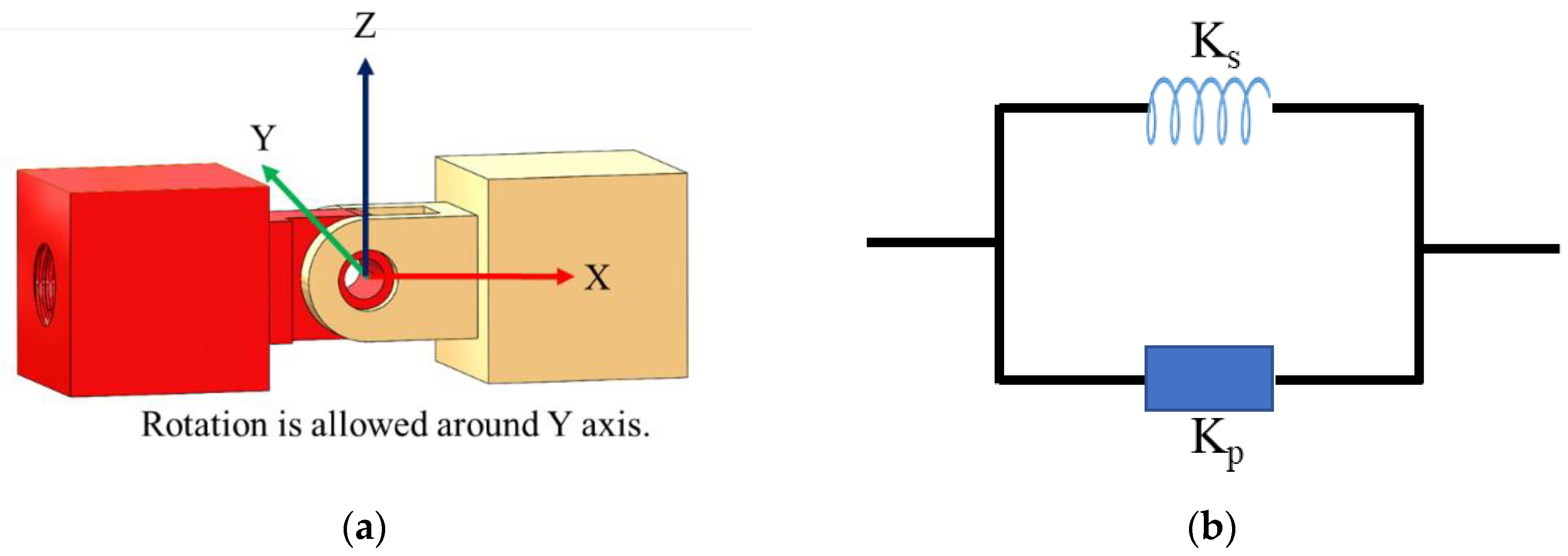
As a typical form of flexible connection, the articulated joint is often used for the connection between very large floating structures (VLFS). Considering that, in this study, waves, wind, and currents act along the FPV system, the connectors can be set as the hinged joint rotating only around a single axis, as shown in Figure 4. The spacing between adjacent floating platforms is set as 1 m, and the left and right sides of the floating platforms extend a rigid rod of 0.5 m. The connection position is set in the middle of two floating platforms. Furthermore, in AQWA, a certain amount of stiffness and damping can be added to the connector, which is beneficial for improving the effect of the connector, as shown in Figure 4b. In this study, the stiffness and damping of the hinged joint are set as 1 × 105 Nm/° and 1 × 105 Nms/°, respectively.
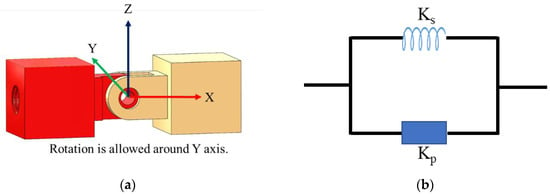
Figure 4.
Hinged joint setting, (a) sketch of the hinged joint, (b) sketch of the stiffness-damping model
- (4)
- Mooring system
The FPV system is anchored on both sides by four R3 stud chains, with a diameter of 35 mm, parallel to the FPV system. The projection of the anchor chains on the X-axis is 50 m, with a length of 58.556 m. The mooring method is the catenary line suitable for shallow water conditions, as shown in Figure 5. The detailed parameters of the anchor chain are shown in Table 6 [29].
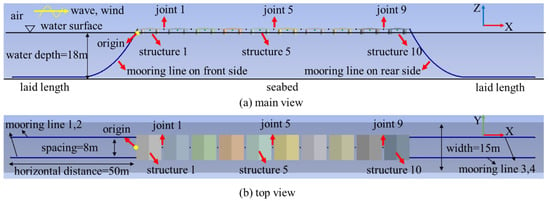
Figure 5.
Hydrodynamic model of FPV system.
Table 6.
Parameters of mooring lines.
2.2.2. Numerical Model Setup
According to Section 2.2.1, the numerical model of the single-row FPV system with ten floating platforms is established by ANSYS-AQWA, as shown in Figure 5. The boundary conditions of the numerical model are introduced in detail in Section 2.1. The time step analysis (ignored here) indicates that the time step (0.01 s) is excellent in terms of computational accuracy and efficiency. In addition, to facilitate comparative analysis of the calculation results, the floating platforms are named structure 1 to structure 10 from left to right, and the hinged joints are named joint 1 to joint 10.
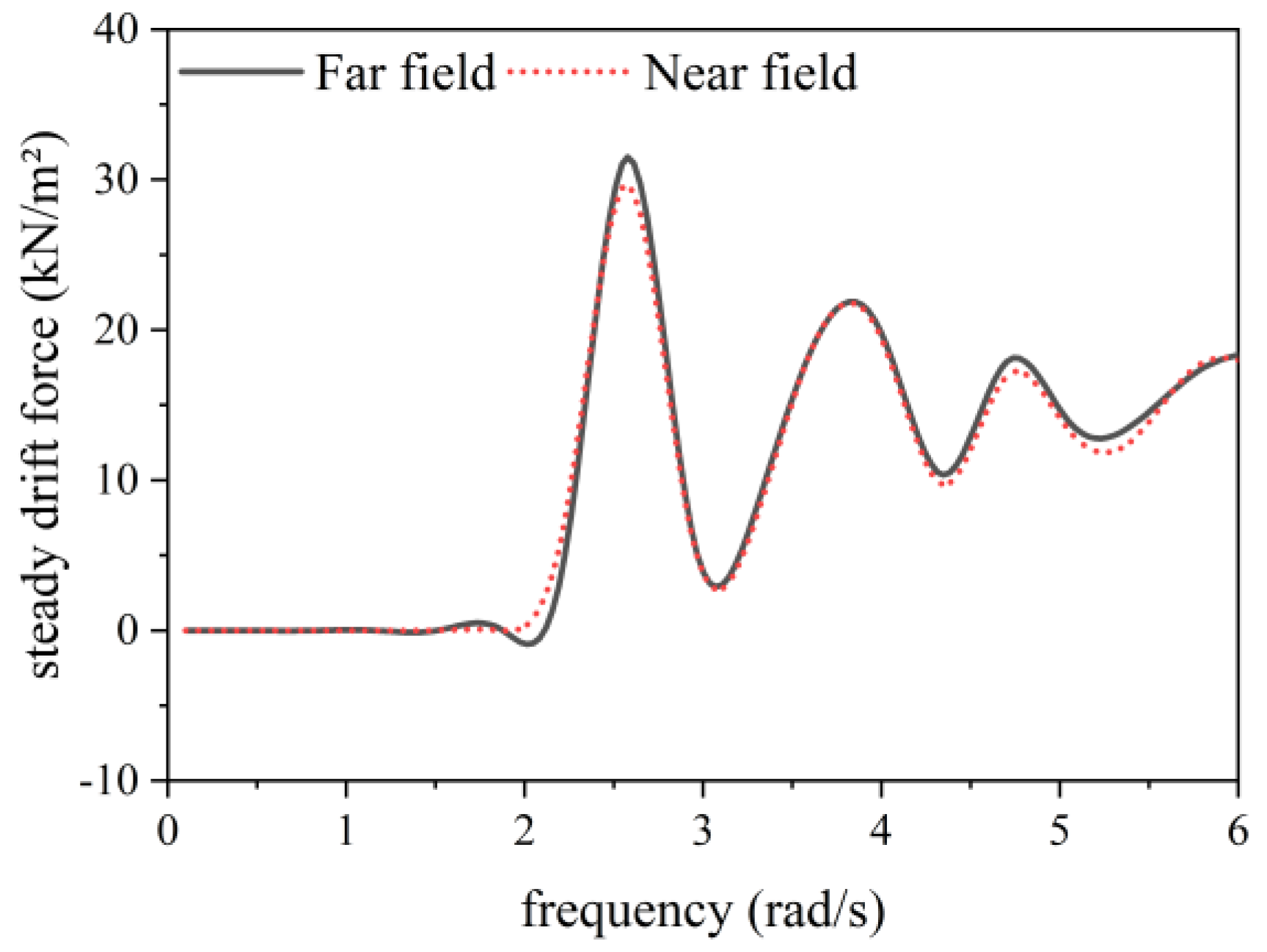
To verify whether the grid division meets the demand of the hydrodynamic calculation accuracy, the second-order mean drift force solved by the near-field method and far-field method are compared [30] (ANSYS, AQWA, 2013). In detail, the near-field method integrates the surface pressure of the floating structure based on the potential theory, and the calculation accuracy depends on the grid division. The far-field method calculates the second-order mean drift force by solving the momentum equation, and it has nothing to do with the grid division. When the results obtained by the two methods are in good agreement with each other, it could be considered that the grid division meets the requirements of calculation accuracy. After the systematical comparison (omitted here for brevity) of a series of grid divisions (the total grid number of 1575, 2535, 3550, and 4350), and considering the computation accuracy and efficiency, the mesh of 3550 grids for a single floating platform is selected in this study, as shown in Figure 6. In detail, the structure below the water's surface is evenly divided, with a size of 0.3 m, and the maximum grid size of the structure above the water surface is 0.6 m. With this grid division, the corresponding second-order mean drift forces calculated by the near-field method and far-field method are shown in Figure 7. The comparison shows that they match quite well with each other, indicating the good quality of this grid division, which can be confidently applied in the following parts.
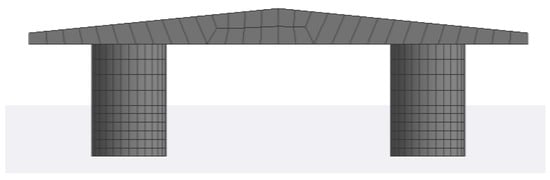
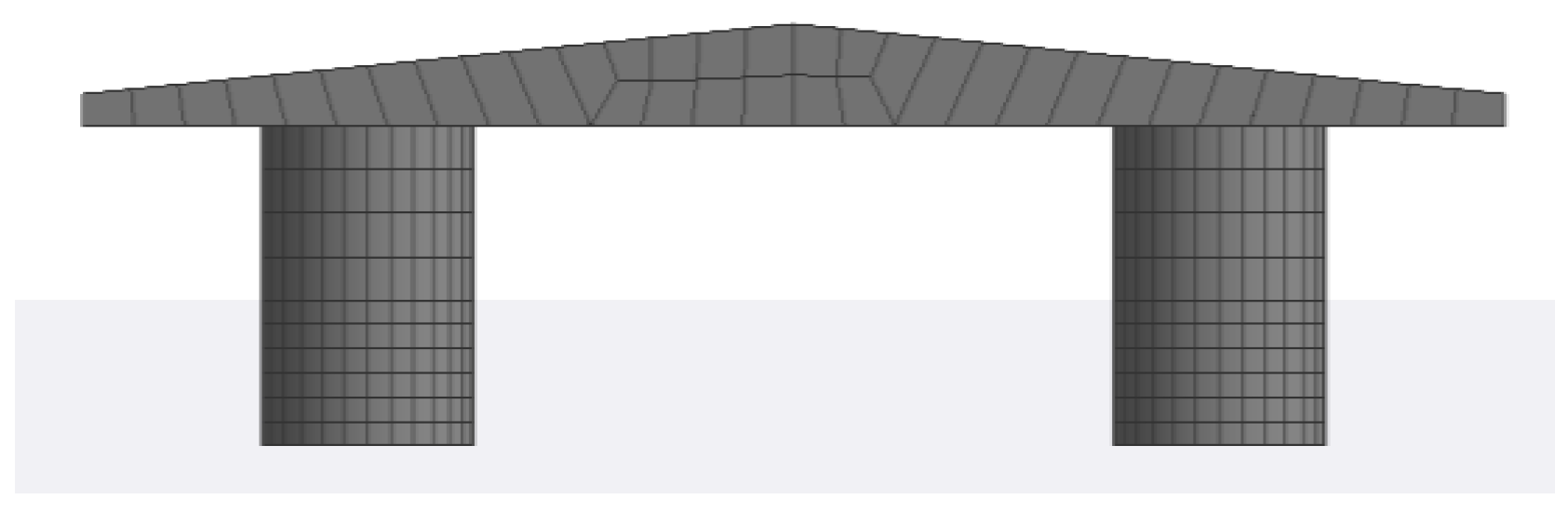
Figure 6.
Sketch of grid division.
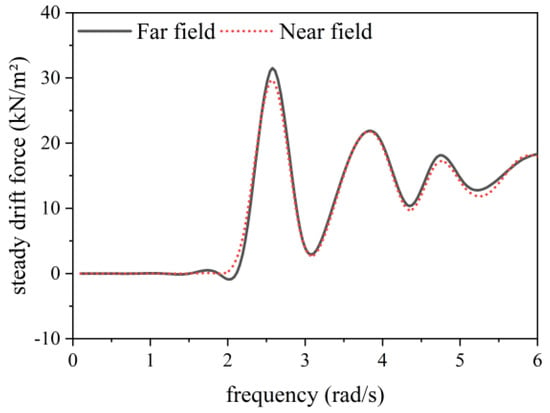
Figure 7.
Comparison of the far-field method and the near-field method.
3. Hydrodynamic Coefficients
As the important parameters for predicting the seakeeping and stability of floating platforms, the hydrodynamic coefficients are of great significance for accurately predicting the dynamic response of floating platforms under waves. In this section, the hydrodynamic coefficients of a single floating platform, including added mass, radiation damping, wave excitation force, and response amplitude operators (RAOs), are calculated and analyzed.
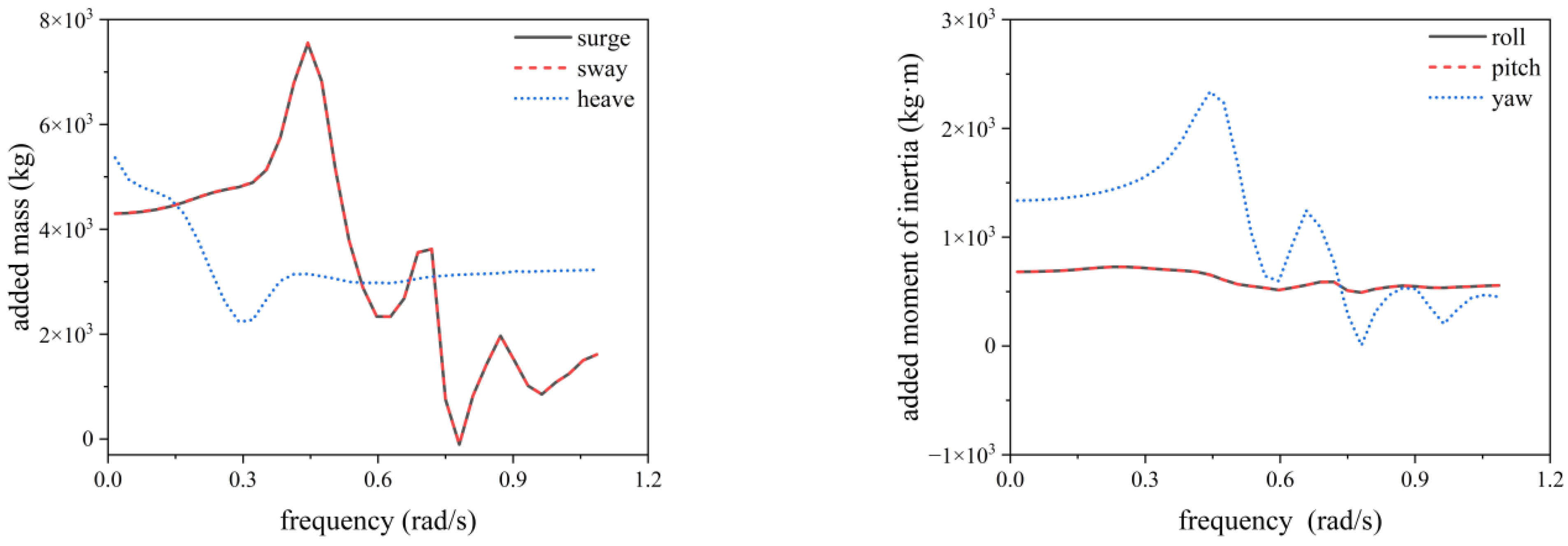
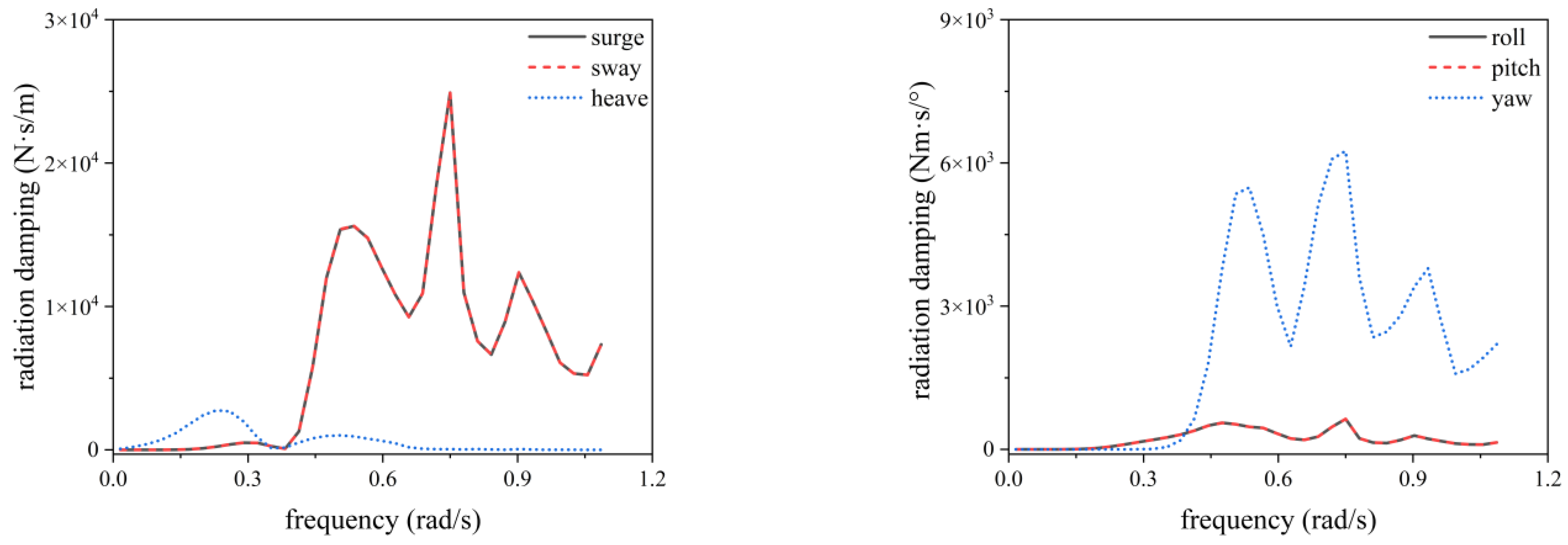
The added mass of a single floating platform is shown in Figure 8, which represents the variation of the added water mass of the floating platform in six degrees of freedom (DOFs) under waves with different frequencies. It can be seen that the added mass in surge, sway, and yaw reaches the maximum in the wave frequency range of 0.40~0.50 rad/s, and the added mass in heave, roll, and pitch has little change with wave frequency, especially after 0.45 rad/s. The radiation damping of a single floating platform is shown in Figure 9. The radiation damping in surge, sway, and yaw varies significantly with wave frequency. When the wave frequency is small (less than 0.30 rad/s), the radiation damping approaches 0, and it reaches the maximum in the wave frequency range of 0.70~0.80 rad/s. In addition, the radiation damping in heave, roll, and pitch does not vary significantly with wave frequency and is generally close to 0.
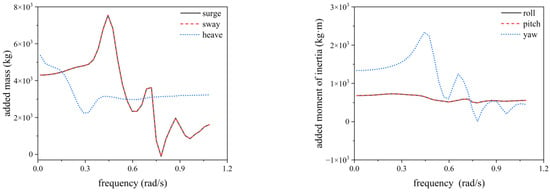
Figure 8.
Added mass of floating platform.
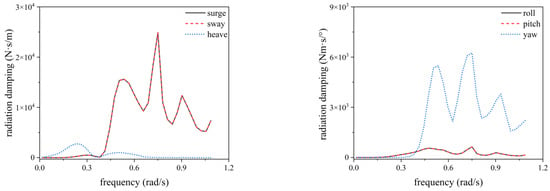
Figure 9.
Radiation damping of floating platform.
The floating platform is in a static state in still water without moving speed, so the added mass and radiation damping in six DOFs are all symmetric matrixes. In addition, the projection of the center of the floating platform on the X–Y plane is located at the origin, and the floating platform is symmetrical around the X–Z plane and the Y–Z plane, so the added mass and radiation damping of the floating platform in surge, sway, pitch, and roll are basically consistent.
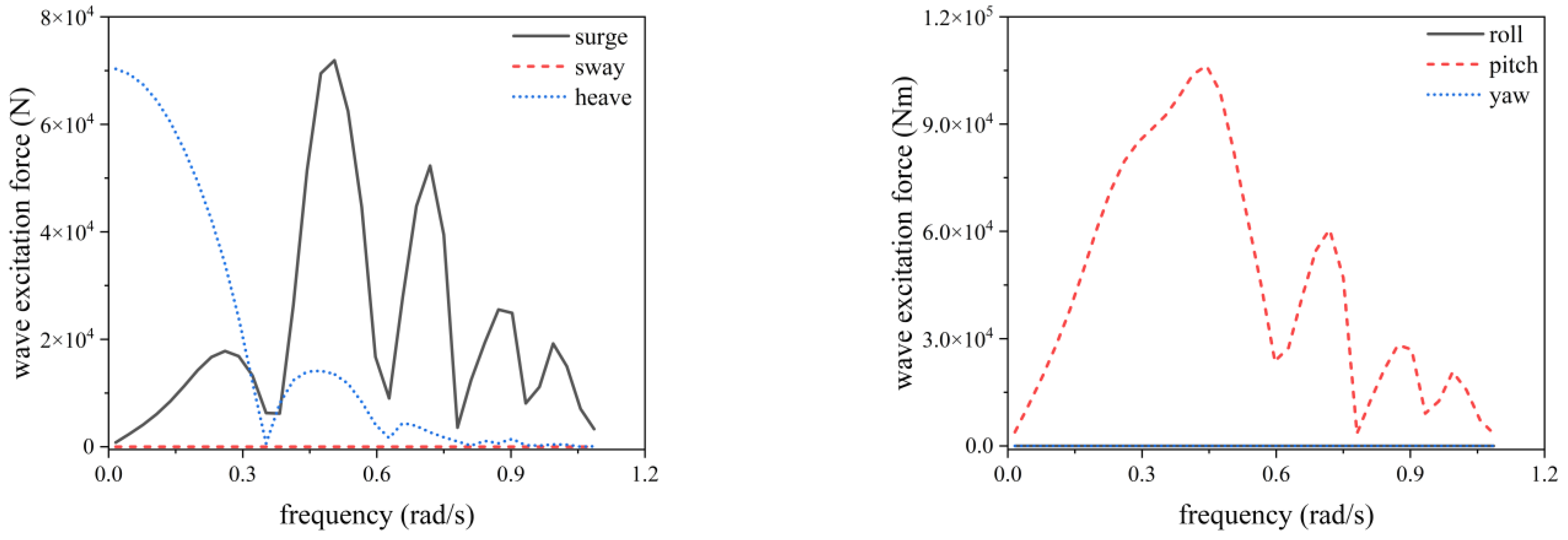
Under the action of waves, the floating platform and wave will interfere with each other. Based on the diffraction theory, the wave excitation forces, including the Froude–Krylov force and the diffraction wave force, can be solved. The wave excitation forces of a single floating platform are shown in Figure 10. It can be seen that the floating platform will withstand the wave excitation forces in three DOFs (surge, heave, and pitch), and the wave excitation forces in sway, roll, and yaw approach 0 when the wave is incident at 0°. Under the moderate wave of this study (frequency of 0.0215 rad/s), the wave excitation force in heave is significantly greater than that in surge. In addition, the wave excitation forces in surge and pitch of the floating platform vary significantly with wave frequency, but, as the wave frequency increases, the wave excitation forces exhibit a “decreasing” trend in general. The wave excitation force in surge reaches the maximum in the wave frequency range of 0.45 rad/s to 0.55 rad/s, while the wave excitation force in pitch reaches the maximum in the wave frequency range of 0.40 rad/s to 0.50 rad/s.
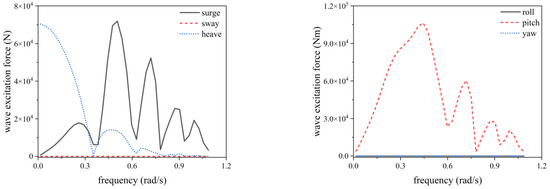
Figure 10.
Wave excitation force of the floating platform.
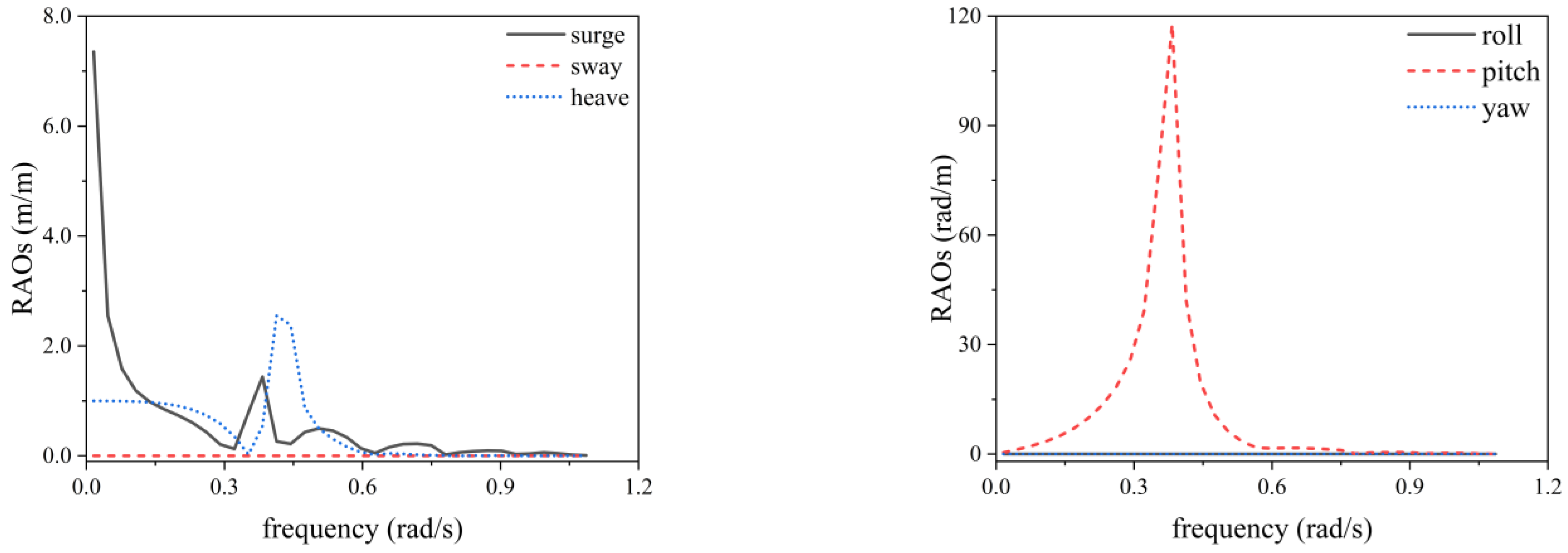
The motion responses of the floating platform under a unit wave can be described by the response amplitude operators (RAOs), which represent the transfer function of wave amplitude in various positions. The RAOs of a single floating platform are shown in Figure 11. It can be seen that the floating platform will generate significant motion responses in surge, heave, and pitch, and the motion responses in sway, roll, and yaw approach zero when the wave is incident at 0°. The response amplitude operator (RAO) in surge of the floating platform is obvious under waves with low frequency, which means it can resist the waves for short periods. Moreover, as the wave frequency increases, the RAO in surge significantly decreases. The RAO in heave exhibits a maximum in the wave frequency range of 0.40 rad/s to 0.50 rad/s. The RAO in pitch shows a trend of first increasing and then decreasing, with the maximum occurring in the wave frequency range of 0.30 rad/s to 0.45 rad/s. It should be noted that the RAOs of the floating platform in surge, heave, and pitch tend to approach 0 as the wave frequency increases.
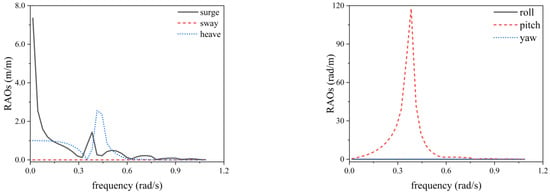
Figure 11.
RAOs of floating platform.
In summary, referring to the environmental loads in Section 2.1.1, the floating platform has good seakeeping and stability. Therefore, this design of the floating platform can be used to construct an FPV system for time-domain analysis to explore the hydrodynamic characteristics under ocean loads.
4. Load Coupling Analysis
The ocean environment is dynamic and variable, and an FPV array arranged in the ocean is highly susceptible to the continuous effects of waves, wind, and currents, and the coupling mechanism is very complex. In this section, based on typical sea conditions (Table 1), three different load combinations, namely “wave only”, “wave and current”, and “wave, current and wind”, are set up to discuss the dynamic response mechanism of the single-row FPV system. The loads are parallel to the FPV system.
4.1. Motion Responses
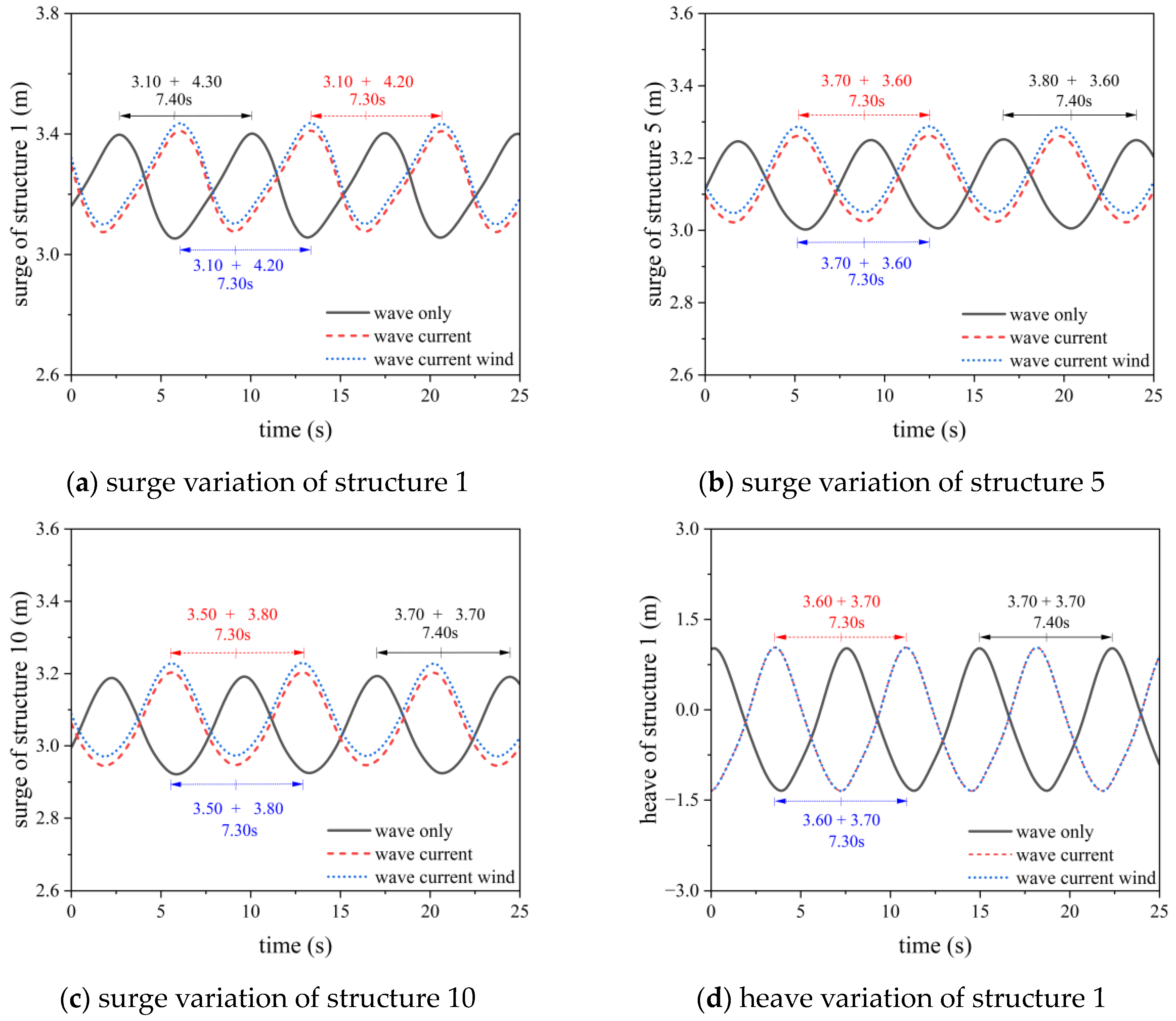
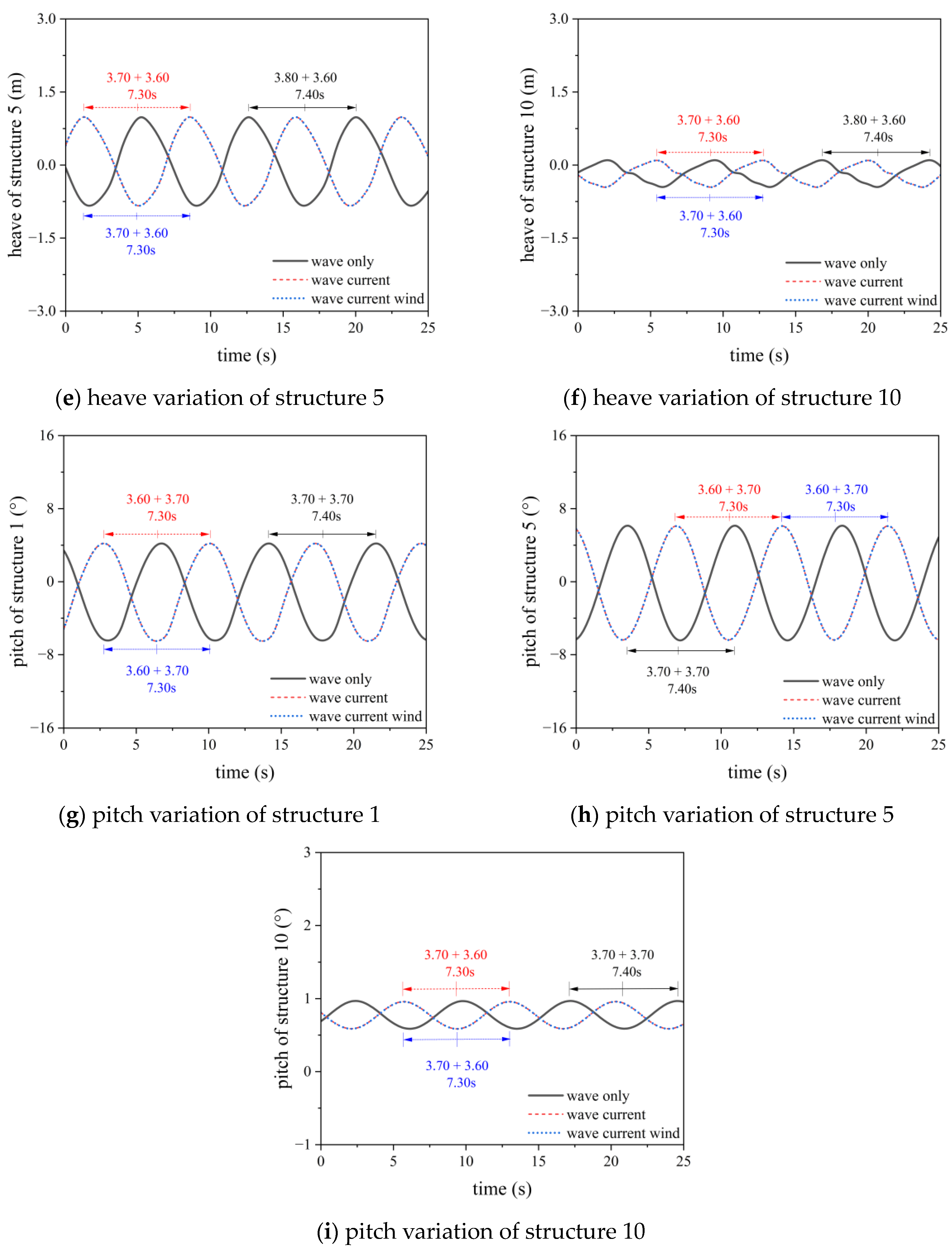
Due to the action of waves, the floating platforms will generate motions in surge (translation along the X-axis), heave (translation along the Z-axis), and pitch (rotation around the Y-axis). After the stabilization of loads and the FPV system, the motion variation of floating platforms (structure 1, 5, 10) at typical positions are selected for analysis, as shown in Figure 12. It can be seen that: (1) Determined by the periodicity of wave, the motion responses of floating platforms exhibit periodic characteristics. When the wave acts alone, the motion period of floating platforms is consistent with the wave period. (2) The existence of current affects the motion period of floating platforms, with the motion period changing from 7.4 s to 7.3 s. This is mainly due to the changes in relevant parameters of the wave when the wave interacts with the current. Barltrop et al. [31] pointed out that the wave period can be expressed as Equation (12) when wave and current interact together. Therefore, when the wave and current are in the same direction, the period of the wave decreases to 7.3 s. It should be noted that, in this study, the current has only a slight impact on the motion amplitude of floating platforms and is mainly reflected in the motion of the surge. The average increases in the maximum and minimum values are 0.3% and 0.7%, respectively, which can be ignored in terms of quantity. This is mainly because the current is relatively small, only 0.15 m/s; therefore, its impact on the wave is mainly reflected in the change of wave period.
where is the wave period relative to the stationary observer, is the wavelength, is the wave period relative to the current, is the velocity amplitude of the current, and is the angle between the wave and current.
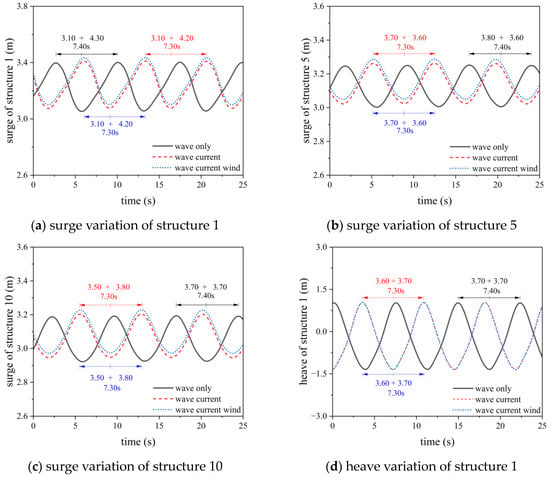
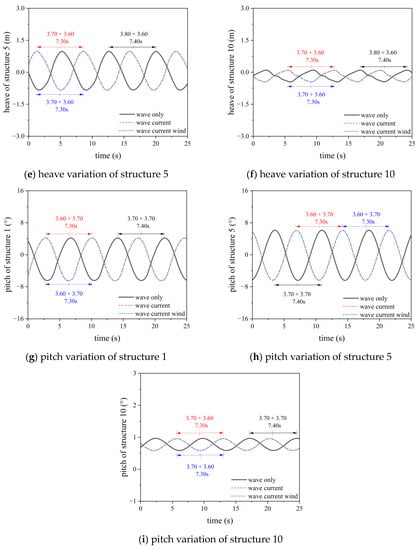
Figure 12.
Motion responses of the floating platforms at typical positions.
(3) The existence of wind only affects the motion amplitudes of floating platforms. The surge amplitude exhibits a slight increase, and the average increases in its maximum and minimum are 0.9% and 0.8%, respectively. This can be attributed to the wind acting in the X-direction, the wind speed is relatively small, and the height of the floating platforms is also small; therefore, the wind has a smaller force on the FPV system. (4) The motion responses of floating platforms in a period are not completely symmetric. This is mainly because the wave in this study belongs to the Stokes second-order wave [32] with an asymmetric wave surface; its crest is steeper, and its trough is slower.
4.2. Force Characteristics
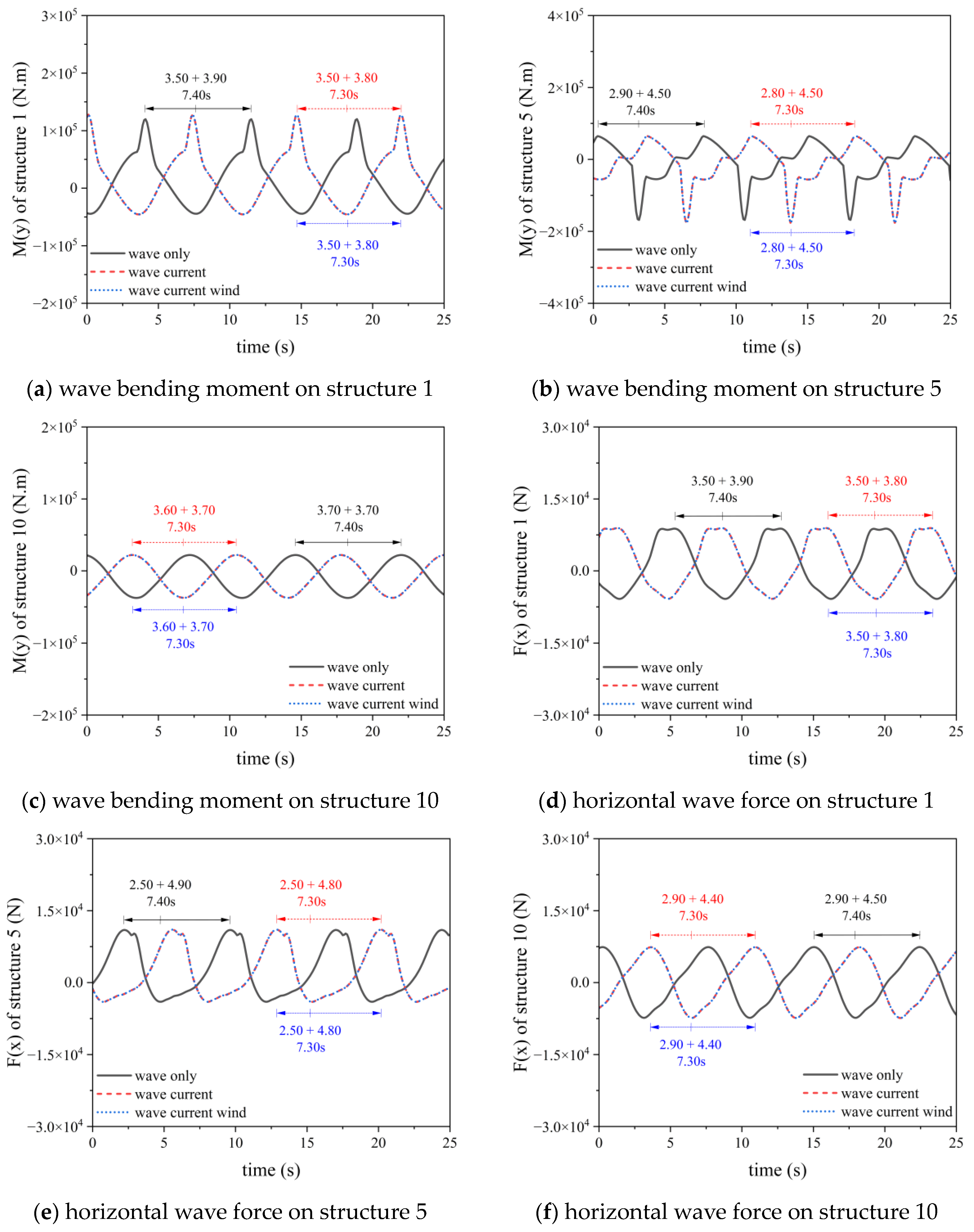
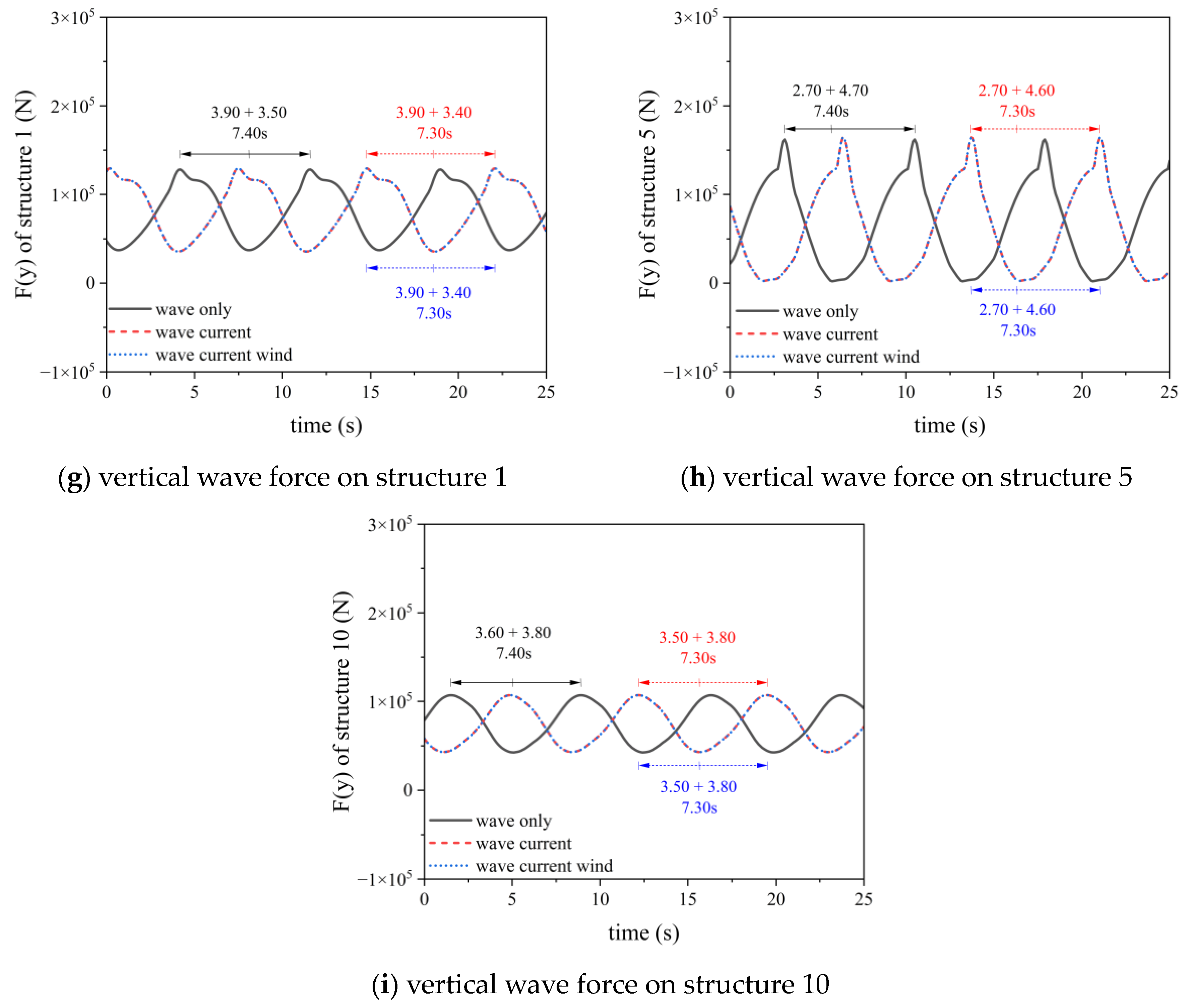
In this section, the external loads applied to the FPV system are wave force, wind force, and current force. Three floating platforms at typical positions are selected, and the force characteristics are explored. The variation of wave forces acting on floating platforms are shown in Figure 13. It can be seen that wave play is a dominant role in the force of floating platforms under the typical sea environment, and the contribution can reach over 99%. The current affects its periodic characteristics more, while the wind load does not have a notable impact on the force. It should be pointed out that the hydrodynamic characteristics of the FPV system will exhibit significant differences when encountering strong winds and huge currents, which will be explored in subsequent research.
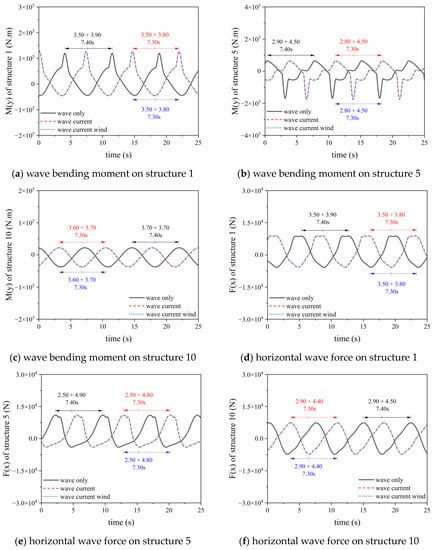
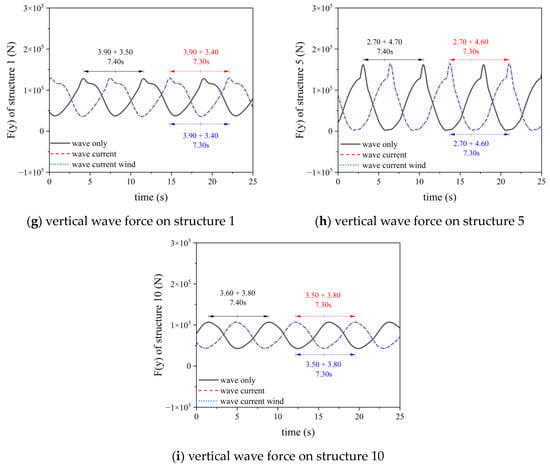
Figure 13.
Wave forces on the floating platforms at typical positions.
In summary, within the scope of this study, wave loads exhibit a significant impact on the dynamic response of the FPV system, with a contribution of up to 99%. The current load has more influence on the periodic characteristics of the dynamic response due to the interaction between waves and currents. In addition, the wind load does not exhibit a notable effect on the dynamic response of the FPV system. It should be noted that the load acting on the floating platform depends on two aspects, i.e., the shape and dimension of the floating platform as well as the environmental loads. For different sea areas, there are significant differences in environmental loads, and the relative amplitudes of wind, waves, and currents can also vary obviously. Therefore, the contribution of wind, waves, and currents will vary with the ocean environment. The load in this study is taken from a moderate-intensity sea area, featuring moderate-intensity waves and relatively weak wind and currents, and the research findings of this study can effectively characterize the interaction mechanism of wind, waves, and currents for such sea areas. For other sea areas with significantly different features, it is expected that the contribution rate of wind, waves, and currents will vary accordingly, which needs further specific calculations based on practical sea loads.
5. The Influence of Wave Parameters
According to the discussion in Section 4, it can be concluded that wave dominates for all cases. To further study the influence of the wave force on the hydrodynamic characteristics of the FPV system, only the wave force is applied to the FPV system in this section, and the hydrodynamic characteristics of the FPV system under waves with different wavelengths and wave heights based on the typical sea condition (wave height = 1.7 m, wave period = 7.4 s) is discussed and analyzed.
5.1. Wavelength
In this section, a single-row FPV system with ten floating platforms is taken as the research object, and the length of the FPV system is L = 109 m. The waves are Stokes waves with a wave height of 1.7 m, and the wave direction is set to 0°. Five groups of waves with different wavelengths are set as 27.5 m (0.25 L), 54.5 m (0.50 L), 109.3 m (1.00 L), 163.2 m (1.50 L), and 217.8 m (2.00 L), and the corresponding wave periods are 4.2 s, 6.0 s, 9.5 s, 13.2 s, and 17.1 s. The hydrodynamic characteristics of the FPV system under waves with different wavelengths are analyzed.
5.1.1. Motion Responses
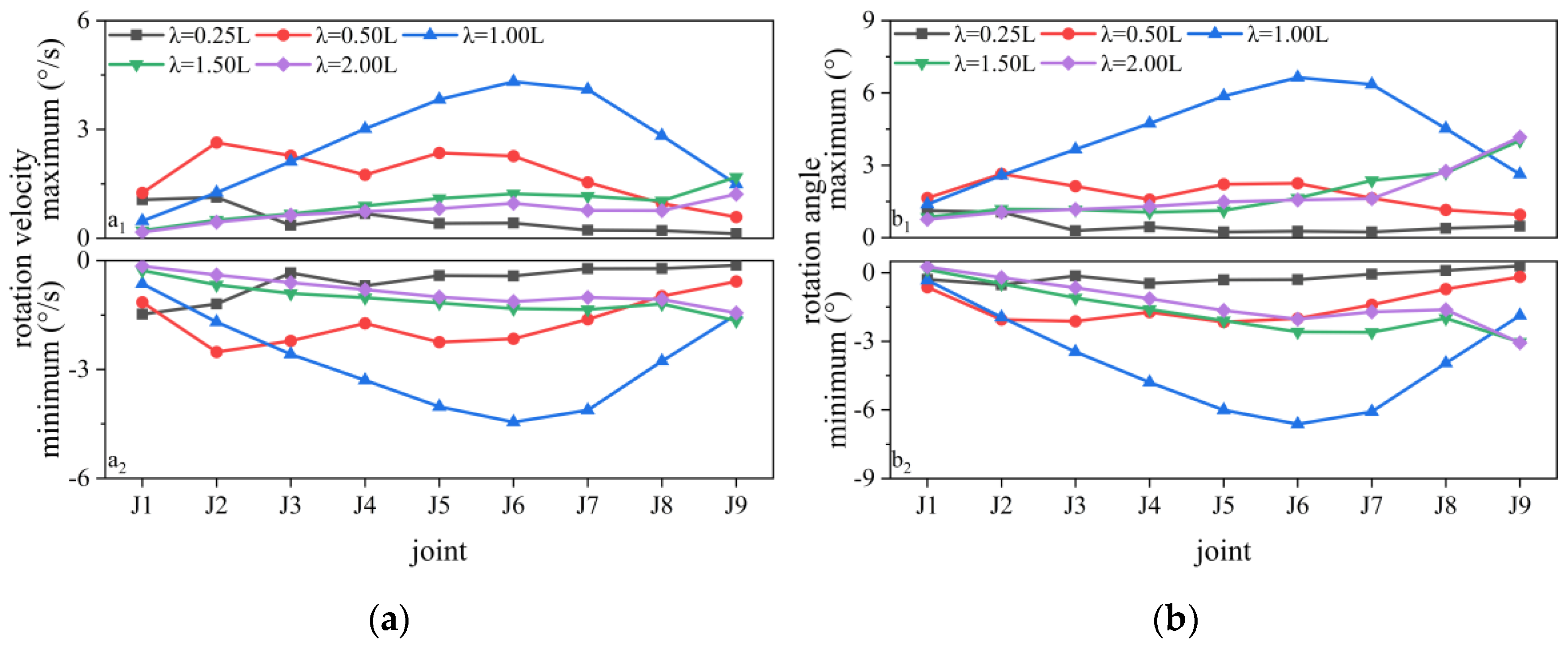
To investigate the effect of wavelength on the rotation of hinged joints, after stabilization, the maximum and minimum rotation velocities and rotation angles from joint 1 to joint 9 are extracted, and the comparison is shown in Figure 14. It can be seen that the amplitudes of the rotation velocities and the rotation angles of hinged joints exhibit a trend of first increasing and then decreasing, and they reach the maximum when the wavelength is consistent with the length of FPV system. This is mainly because the resonance effect between the wave and the FPV system is strongest when the length of the FPV system is consistent with the wavelength.
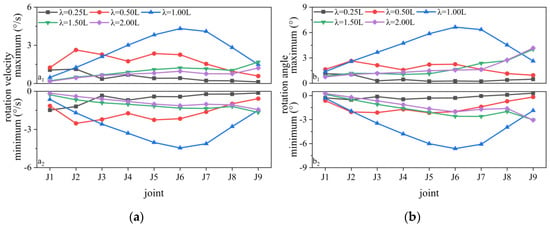
Figure 14.
Amplitude comparisons of the rotation velocity (angle) of hinged joints under waves with different wave lengths, (a) amplitudes of rotation velocity, (b) amplitudes of rotation angle.
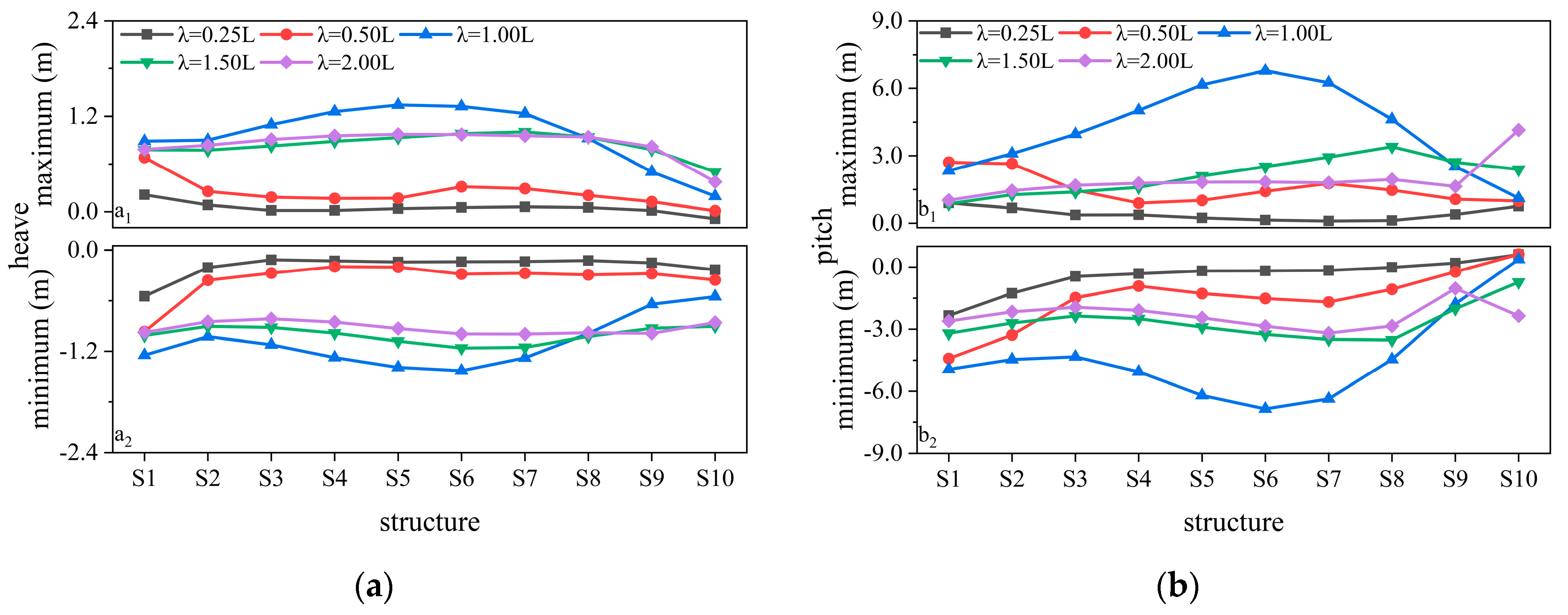
To explore the influence of wavelength on the motions of floating platforms, the maximum and minimum of motion responses of structure 1 to structure 10, after stabilization, are extracted, and the comparison is shown in Figure 15. The results show that the motions in heave and pitch of floating platforms first increase and then decrease with the increase of wavelength, and it exhibits the maximum when the wavelength coincides with the length of FPV system, which is following the variation mechanism of the rotation angle of hinged joints with wavelength. This is mainly due to the fact that the floating platforms achieve their up and down (heave) with a wave through the rotation of hinged joints, while the motion in pitch is caused by the asynchronous motion in heave between the adjacent floating platforms. Therefore, the variation mechanism of motions in heave and pitch of floating platforms with wavelength is similar to that of the rotation angle of hinged joints.
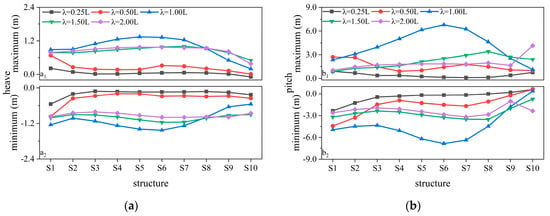
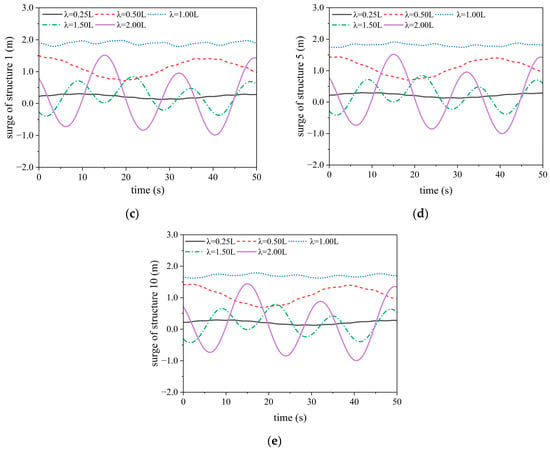
Figure 15.
Motion comparisons of the floating platforms under waves with different wave lengths, (a) heave amplitudes of structure 1 to 10, (b) pitch amplitudes of structure 1 to 10, (c) surge variation of structure 1, (d) surge variation of structure 5, (e) surge variation of structure 10.
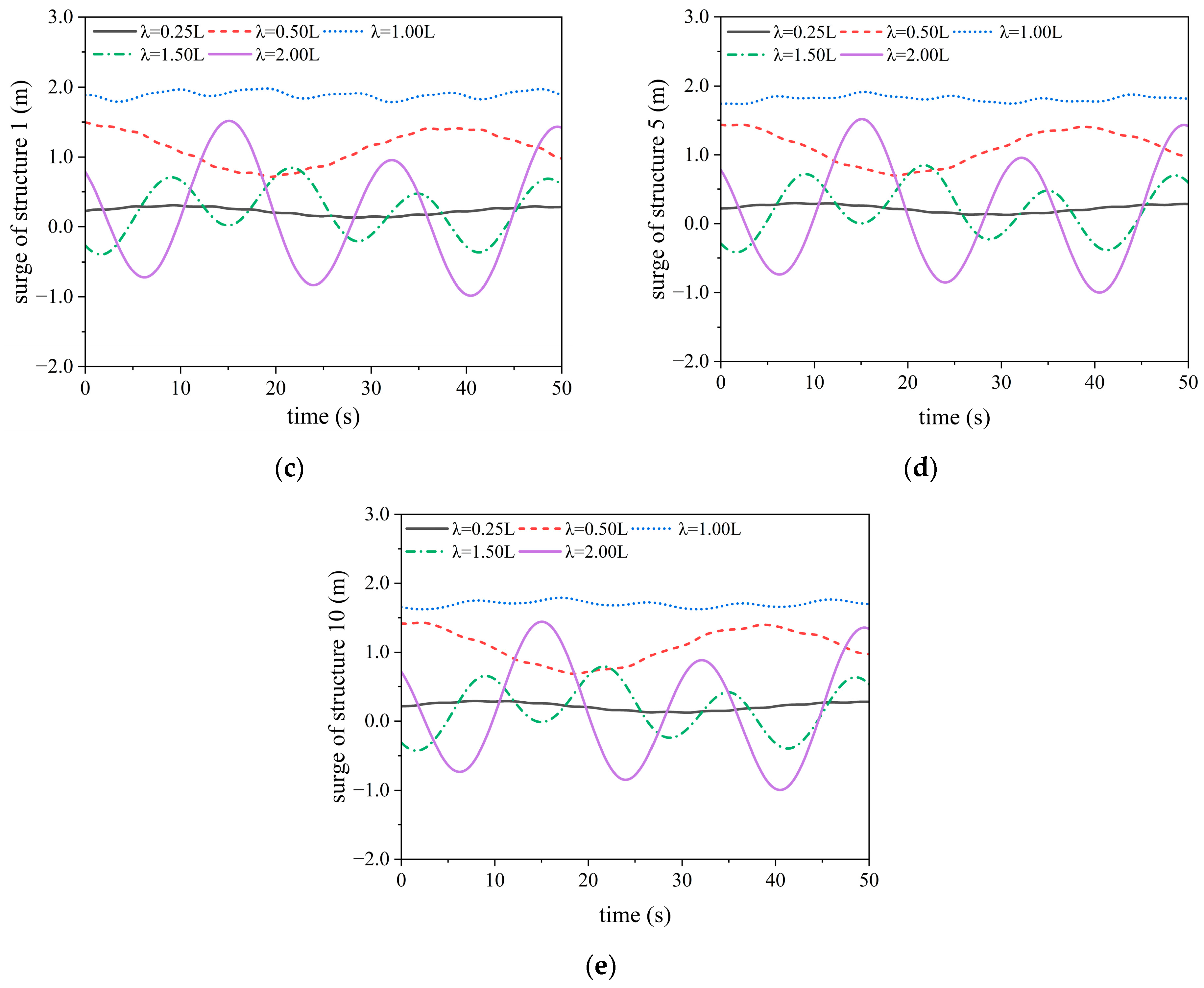
The surge variations of the floating platforms (structure 1, 5, 10) at typical positions are shown in Figure 15c–e. It can be seen that the surge variation patterns of floating platforms show significant differences when subjected to waves with different wavelengths. As the wavelength increases, the surge amplitudes increase at first, decrease later, and increase again as a whole. It should be noted that when the wavelength is greater than the length of the FPV system, the floating platforms move to the left relative to the initial position, and the maximum and range of the surge are enhanced with the wavelength. This may be due to: (1) as shown in Figure 7, when subjected to the five sets of waves, the steady drift forces of floating platforms approach 0. Therefore, the influence of steady drift forces on the surge of floating platforms can be ignored in this study. (2) According to the wave theory, the five sets of wave parameters belong to Stokes waves [32], and their motion trajectory equations can be divided into periodic terms and net displacement terms. The net displacement term causes horizontal flow, which is the “wave-induced current” phenomenon of Stokes waves. (3) As the wavelength increases, the wave steepness (H/L) gradually weakens; therefore, the “wave-induced current” also gradually weakens. In this case, the surge of floating platforms is more influenced by the periodic term. As a result, the floating platforms have a certain amount of movement on both sides. (4) The FPV system is a nonlinear system; when the wavelength is proportional to the length of the FPV system, the resonance will occur again. Therefore, the maximum and range of surge increase again with the wavelength.
In addition, due to the changes in wavelength, the transmission mechanism of the motion amplitudes of hinged joints and floating platforms within the FPV system exhibits significant differences. From Figure 14 and Figure 15, it can be seen that when the wavelength is less than the length of the FPV system, there is no significant similarity in the transmission mechanism. When the wavelength is greater than or equal to the length of the FPV system, it exhibits a pattern of first increasing and then decreasing along the wave direction, with only a change in the position where the maximum of motion amplitudes occurs.
5.1.2. Force Characteristics
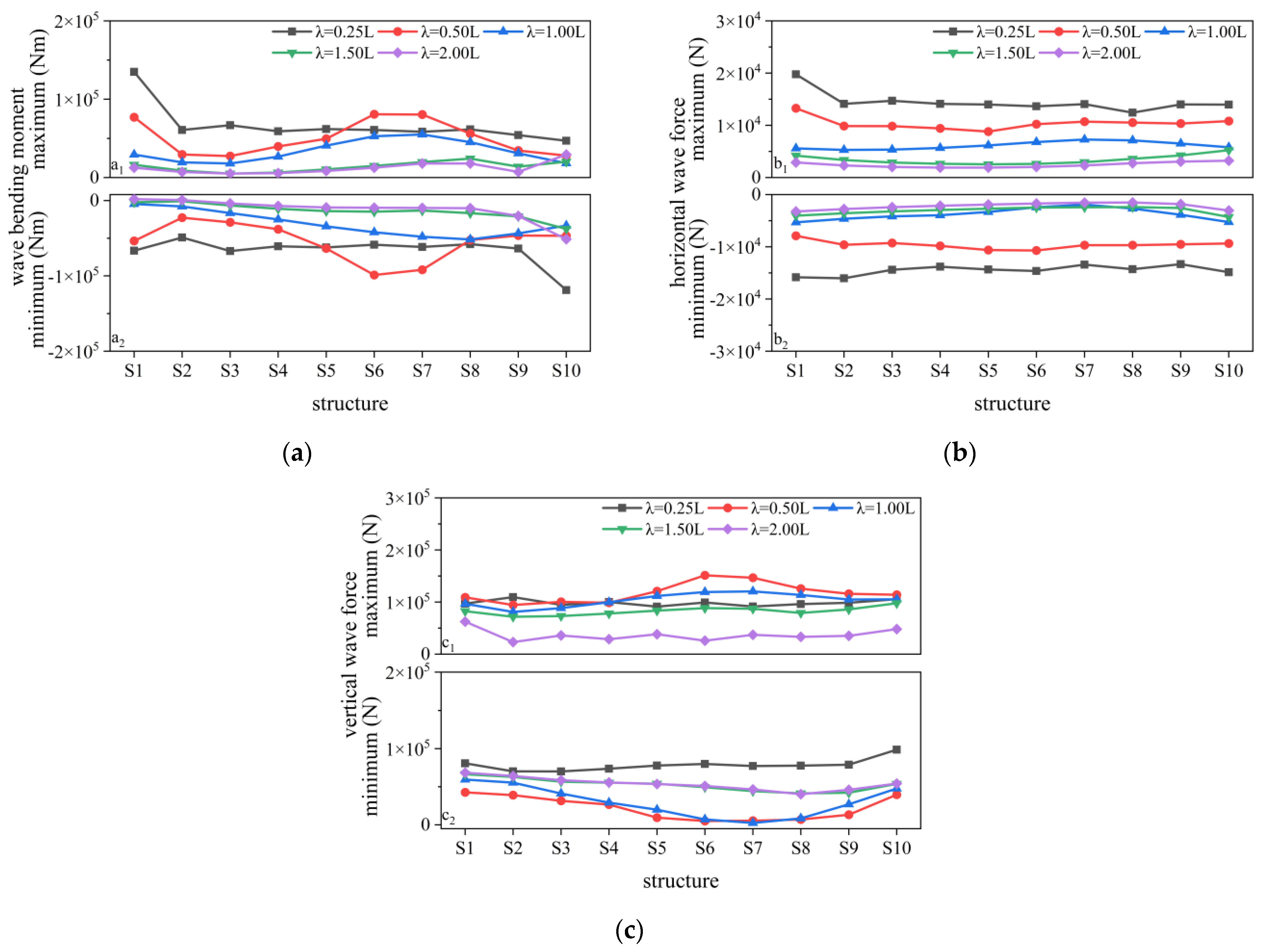
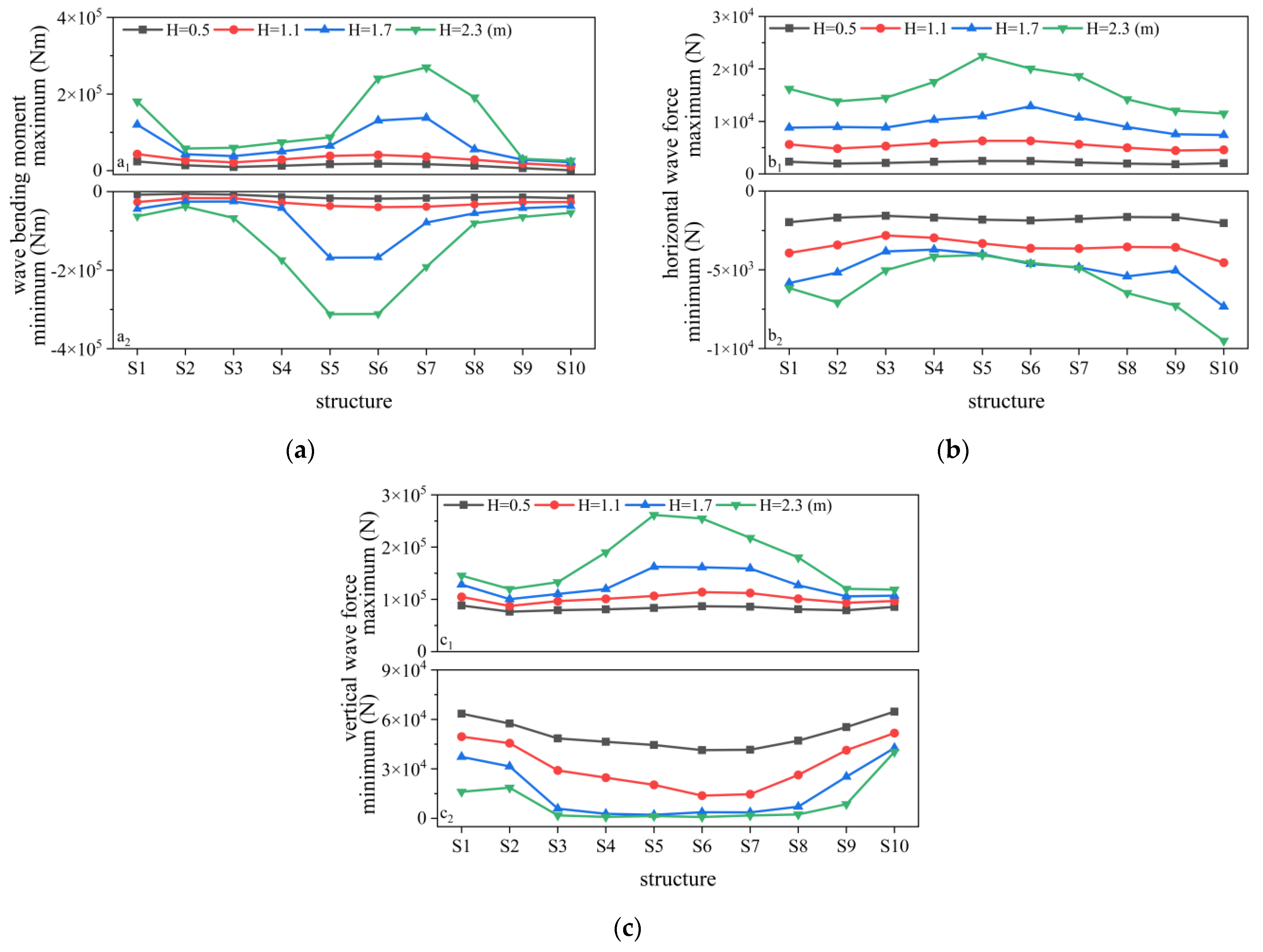
To investigate the effect of wavelength on the wave forces acting on floating platforms, the maximums and minimums of the wave forces acting on structures 1 to 10 after stabilization are extracted, and the comparison is shown in Figure 16. As the wavelength increases, the wave forces show a decreasing trend in general, including wave bending moment, horizontal wave force, and vertical wave force. This can be attributed to the fact that (1) the wave forces acting on floating platforms come from the pressure difference on the outer surfaces of floating platforms, which is influenced by the intensity of incident waves and the motion of floating platforms, and (2) considering that the motion of floating platforms first increases and then decreases with the increase of wavelength, the weakening of wave forces on floating platforms may be caused by the weakening of wave steepness (H/L), which leads to a decrease in wave intensity.
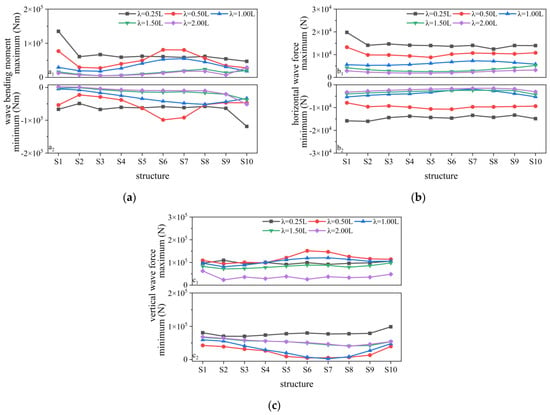
Figure 16.
Comparisons of the amplitudes of wave forces on floating platforms under waves with different wave lengths, (a) wave bending moment, (b) horizontal wave force, (c) vertical wave force.
In addition, the results show that the vertical wave force and the wave bending moment are significantly greater than the horizontal wave force. This is mainly due to the following factors: (1) the horizontal wave force is generated by the pressure difference between the water on the left and right sides of the floating platform. Similarly, the vertical wave force originates from the pressure difference between the water on the upper and lower surfaces of the floating platform. The wave bending moment is induced by both the horizontal wave force and the vertical wave force. (2) In this study, the upper surface of the floating platform is not submerged, resulting in a significant vertical wave force and a corresponding wave bending moment.
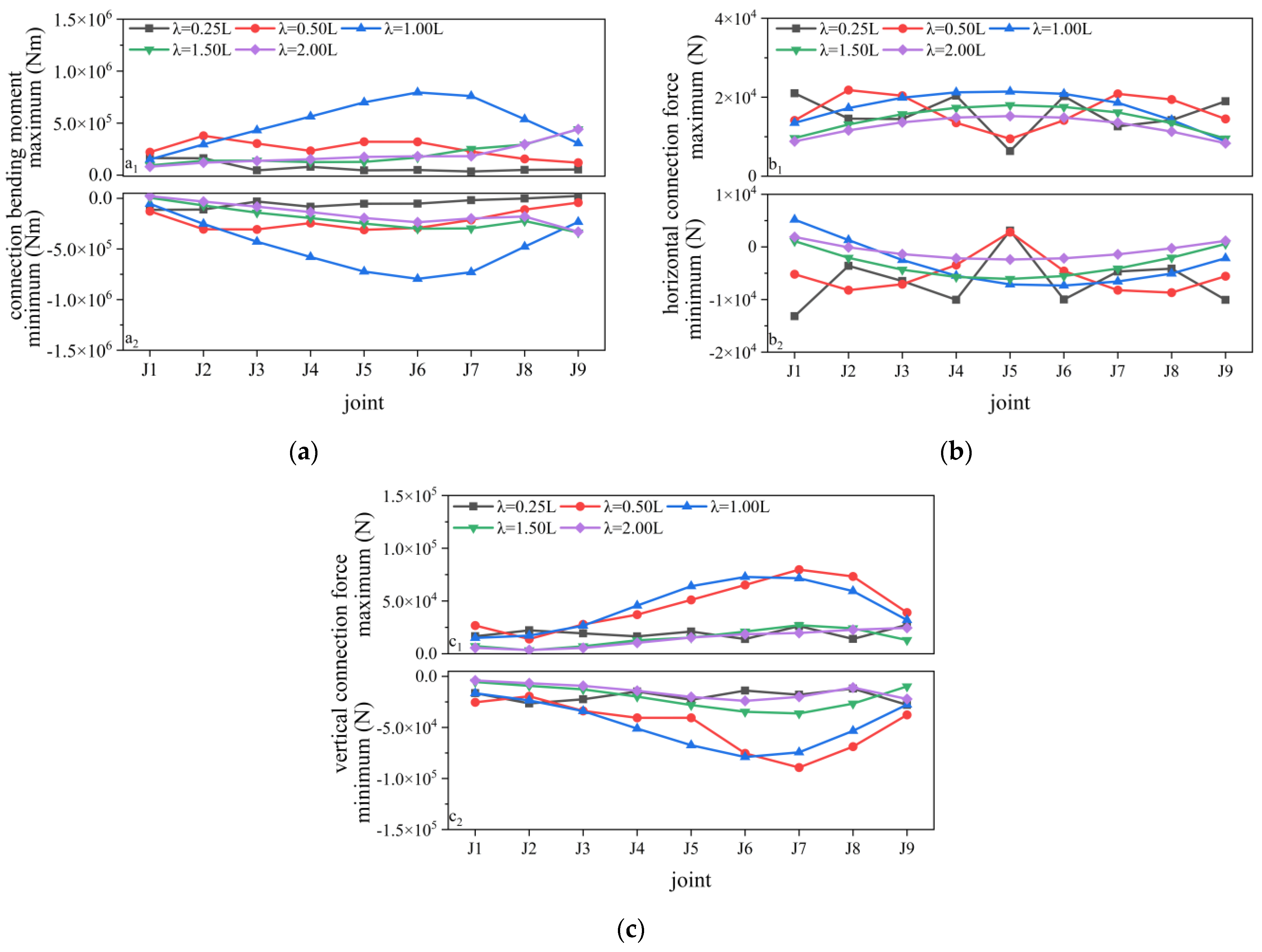
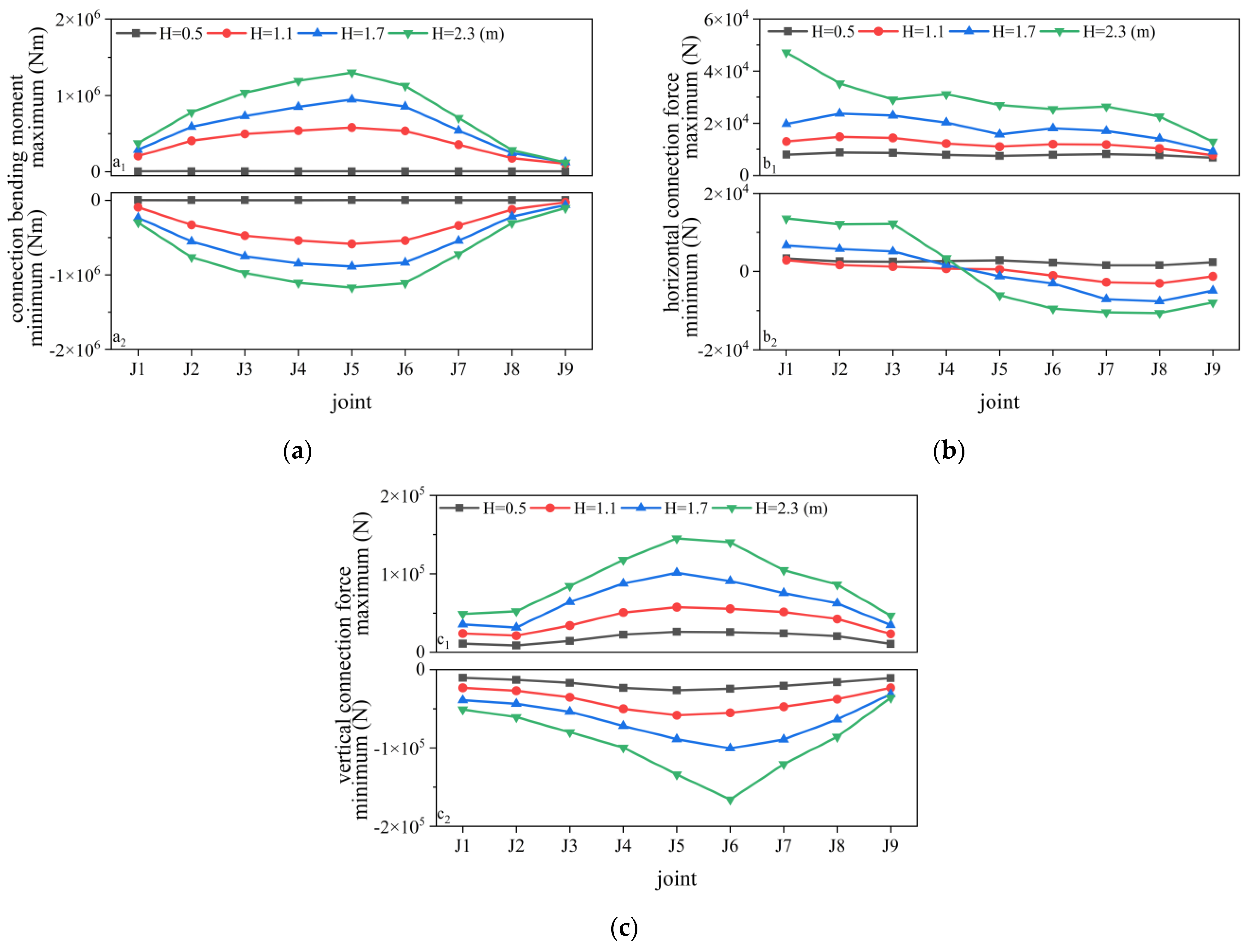
Similarly, the maximums and minimums of the connection forces of joint 1 to joint 9 after stabilization are extracted, and the comparison is shown in Figure 17. It can be seen that the connection forces of hinged joints, including connection bending moments, horizontal connection forces, and vertical connection forces, first increase and then decrease, in general, as the wavelength increases. This can be attributed to the following factors: (1) the rotation stiffness and rotation damping of hinged joints are constant; according to Equation (13), the connection bending moment should be directly related to the rotation velocity and rotation angle. Therefore, the variation of the connection bending moment with the wavelength should be similar to that of the rotation angle and rotation velocity of hinged joints, that is, increasing first and then decreasing (Figure 14). (2) When the wavelength is less than the length of FPV system, the FPV system shifts to the right as a whole. For the hinged joint at a certain position, its horizontal connection force is affected by the offset, so the horizontal connection forces increase with the wavelength (Figure 14). When the wavelength is greater than the length of FPV system, the FPV system shifts to both the left and right sides. As the wavelength increases, the offset of the FPV system to the left increases, resulting in a decrease in horizontal connection forces. (3) The floating platforms go up and down (heave) with waves through the rotation of hinged joints. The vertical connection force is caused by the asynchronous motion trend in the heave of adjacent floating platforms, and the latter can be characterized by the rotation angle of hinged joints. Therefore, the variation of vertical connection force with wavelength should be similar to that of the rotation angle of hinged joints (Figure 14).
where is the rotation stiffness, is the rotation angle, is the rotation damping, and is the rotation velocity.
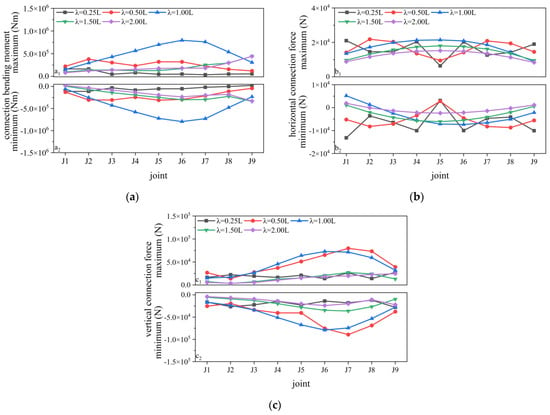
Figure 17.
Comparisons of the amplitudes of connection forces under waves with different wave lengths, (a) connection bending moment, (b) horizontal connection force, (c) vertical connection force.
5.1.3. Mooring Forces
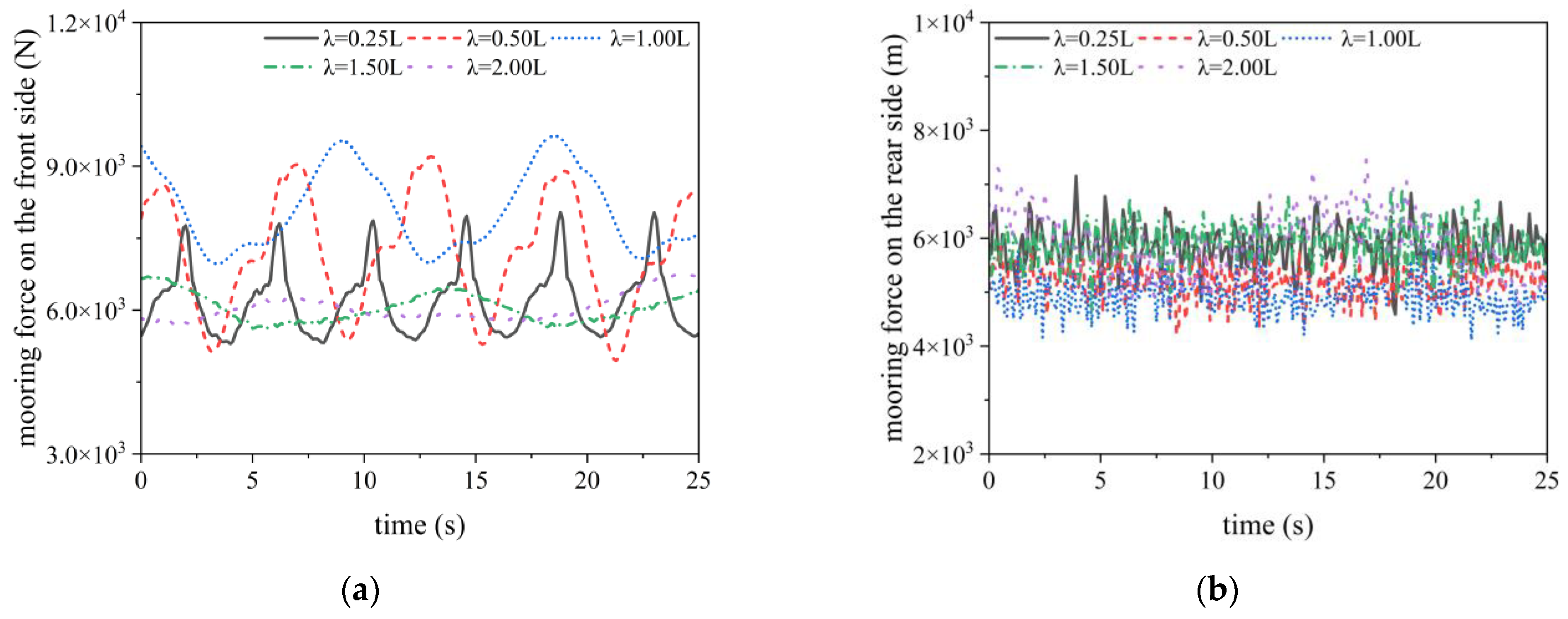
The variation of mooring forces on both sides of the FPV system is shown in Figure 18. It can be seen that the mooring forces on the front side exhibit a periodic variation, and the maximum first increases and then decreases with the increase of wavelength. When the wavelength is consistent with the length of FPV system, the mooring forces on the front side reach the maximum. This is mainly due to the more intense motion of floating platforms under the incident wave of this wavelength, which generates greater additional torque and, thus, leads to greater mooring forces [19]. The variation of mooring force on the rear side does not show periodicity, and the mooring force first decreases and then increases, in general, with the increase of wavelength. This is contrary to the mechanism of mooring force on the front side with wavelength. It should be noted that the mooring force on the rear side is greater than that on the front side when the wavelength is large (λ = 2.00 L).
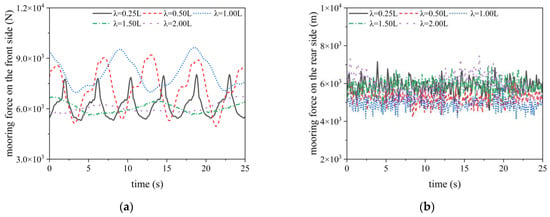
Figure 18.
Variation of mooring forces under waves with different wave lengths, (a) mooring force on the front side, (b) mooring force on the rear side.
5.2. Wave Height
In this section, based on the safety consideration of the project (the floating platforms should not be completely submerged), four groups of waves with different wave heights, 0.5 m, 1.1 m, 1.7 m, and 2.3 m, are set to explore the influence of wave height on the hydrodynamic characteristics of FPV system. The wave direction is set to 0° and the wave period is set to 7.4 s.
5.2.1. Motion Responses
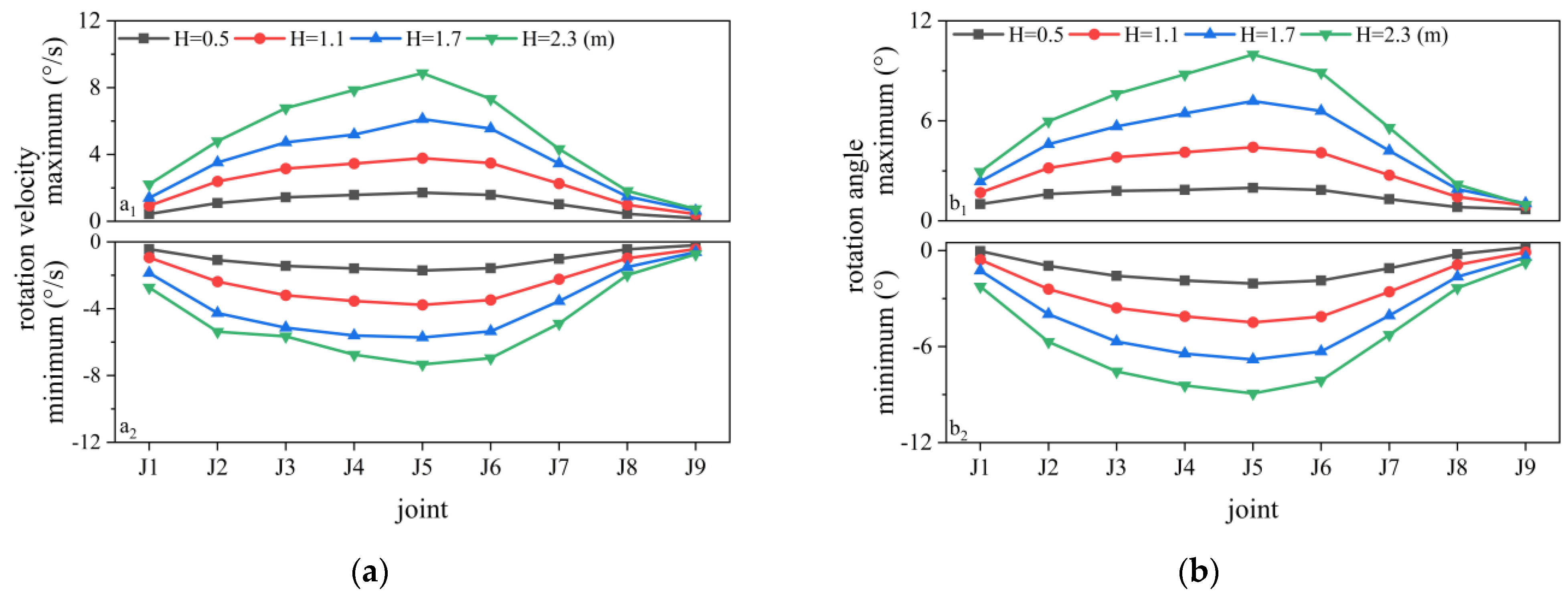
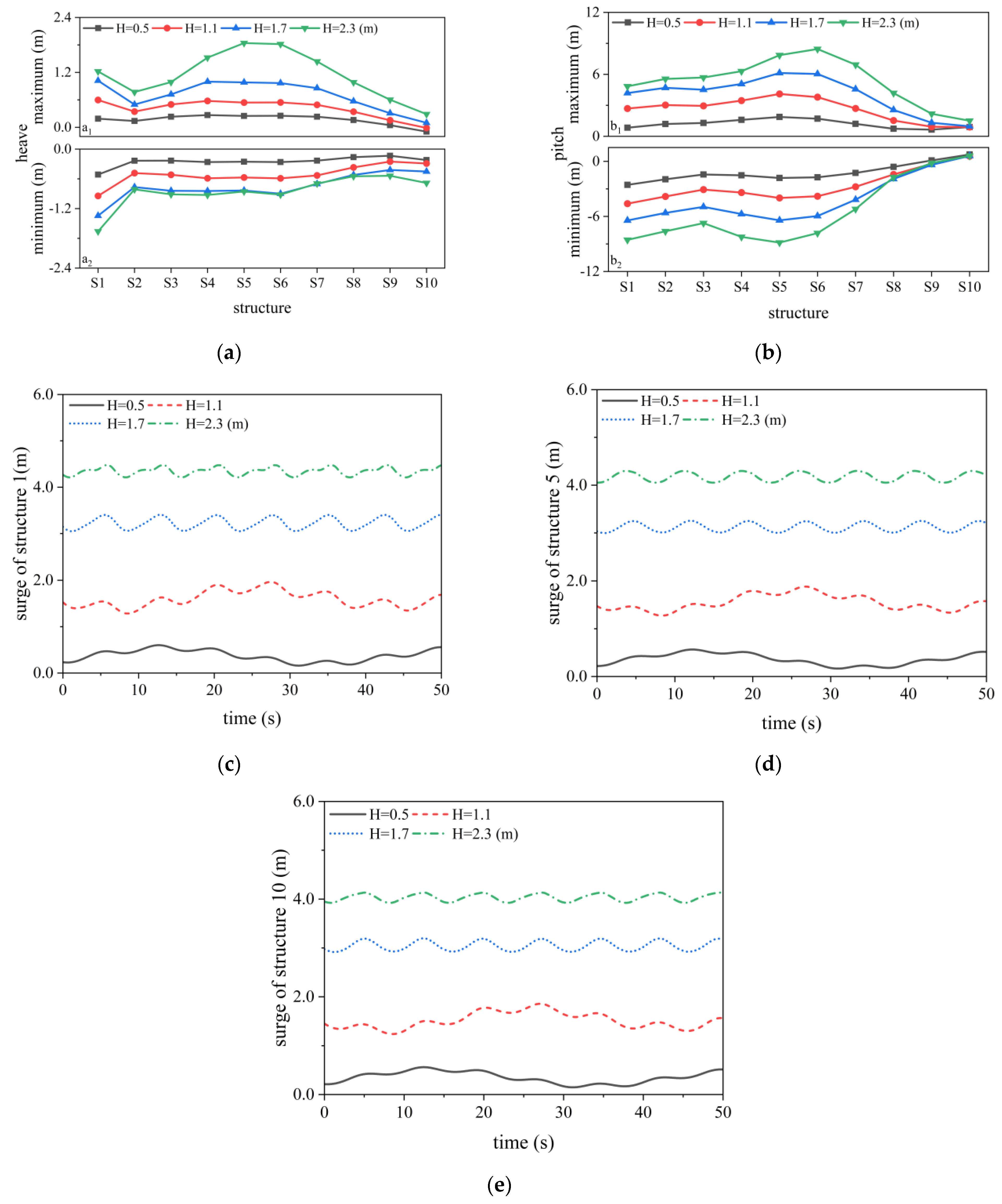
To investigate the influence of wave height on the rotation of hinged joints, the maximums and minimums of the rotation velocities and rotation angles from joint 1 to joint 9 after stabilization are extracted, and the comparison is shown in Figure 19. It can be seen that, as the wave height increases, the rotation of hinged joints becomes more significant. Similarly, the comparison of the motion responses of structures 1 to 10 is shown in Figure 20. The motions in heave and pitch of floating platforms exhibit a significant increase. This is mainly because the wave energy enhances with the wave height when the wavelength is constant, which further triggers an enhancement in force and motion of the FPV system.
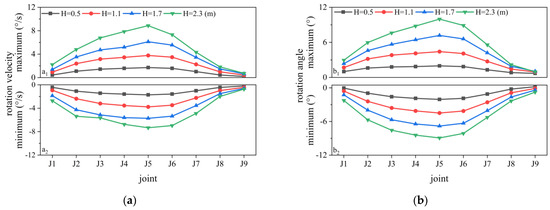
Figure 19.
Comparisons of the rotation velocity (angle) amplitudes of hinged joints under waves with different wave heights, (a) rotation velocity, (b) rotation angle.
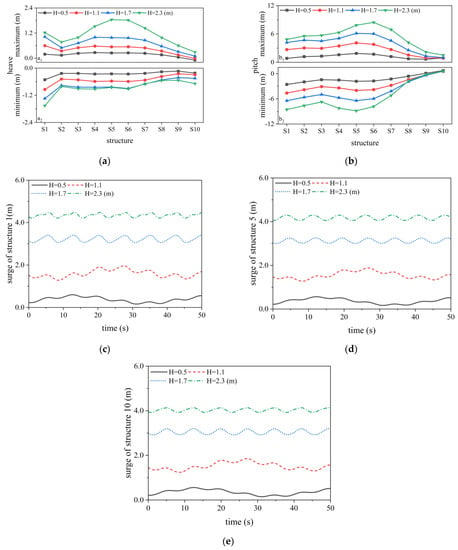
Figure 20.
Comparisons of the motion of floating platforms under waves with different wave heights, (a) heave amplitudes of structure 1 to 10, (b) pitch amplitudes of structure 1 to 10, (c) surge variation of structure 1, (d) surge variation of structure 5, (e) surge variation of structure 10.
The surge variations of floating platforms at typical positions (structures 1, 5, and 10) are shown in Figure 20c–e. It can be seen that the surge amplitudes of floating platforms increase significantly with the wave height. When the wave height is small (0.5 m, 1.1 m), there is a significant difference in the surge variation patterns of floating platforms. In addition, by comparing the motion of hinged joints and floating platforms, it can be seen that the change in wave height only affects the motion amplitudes of hinged joints and floating platforms at the same position, and it does not change the transmission mechanism within the FPV system. Based on Section 5.1 and Section 5.2, it can be seen that the evolution mechanism of the motion amplitudes of floating platforms and hinged joints within the FPV system is related to the corresponding relationship between wavelength and the length of FPV system, but not to wave height.
5.2.2. Force Characteristics
To investigate the effect of wave height on the wave forces acting on floating platforms, the maximums and minimums of the wave forces acting on structures 1 to 10 after stabilization are extracted, and the comparison is shown in Figure 21. It can be seen that, as the wave height increases, the wave forces gradually increase, including the wave bending moment, horizontal wave force, and vertical wave force. In addition, the enhancement effect is more notable for the floating platforms in the middle of the FPV system. This is mainly because the intensity of incident waves enhances with wave height when the wavelength is constant. In addition, as shown in Figure 20, compared to the floating platforms near the two ends of the FPV system, the motions of floating platforms in the middle of the FPV system are more severe, which results in a more significant pressure difference on the outer surfaces of the floating platforms. between the water and the outer surface of floating platforms. Therefore, as the wave height increases, the difference in wave forces on the floating platforms located in the middle of the FPV system becomes more pronounced.
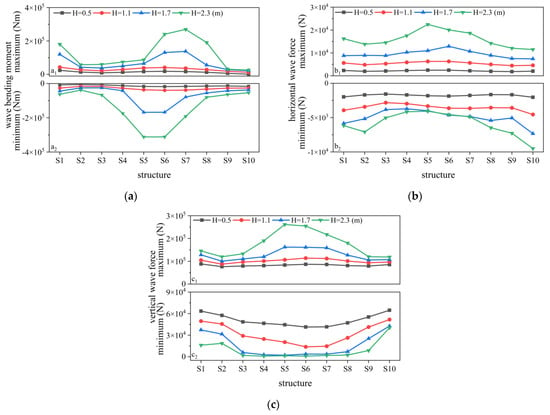
Figure 21.
Comparisons of the wave force amplitudes on floating platforms under waves with different wave heights, (a) wave bending moment, (b) horizontal wave force, (c) horizontal wave force.
To investigate the effect of wave height on the connection forces of hinged joints, the maximums and minimums of the connection forces from joint 1 to joint 10 after stabilization are extracted, and the comparison is shown in Figure 22. It can be seen that the connection bending moment, horizontal connection force, and vertical connection force exhibit significant increases with the wave height. This can be attributed to the following factors: (1) the rotation stiffness and damping of hinged joints are constant, and the rotation velocity and rotation angle increase with the increase of wave height (Figure 19). Therefore, the connection bending moment also increases. (2) The surge amplitudes of floating platforms increase significantly with the wave height, so the horizontal connection force also increases. (3) The rotation angle of hinged joints increases with the wave height, so the vertical connection force gradually increases (which has been explained in Section 5.1).

Figure 22.
Comparisons of the connection force amplitudes under waves with different wave heights, (a) connection bending moment, (b) horizontal connection force, (c) vertical connection force.
5.2.3. Mooring Forces
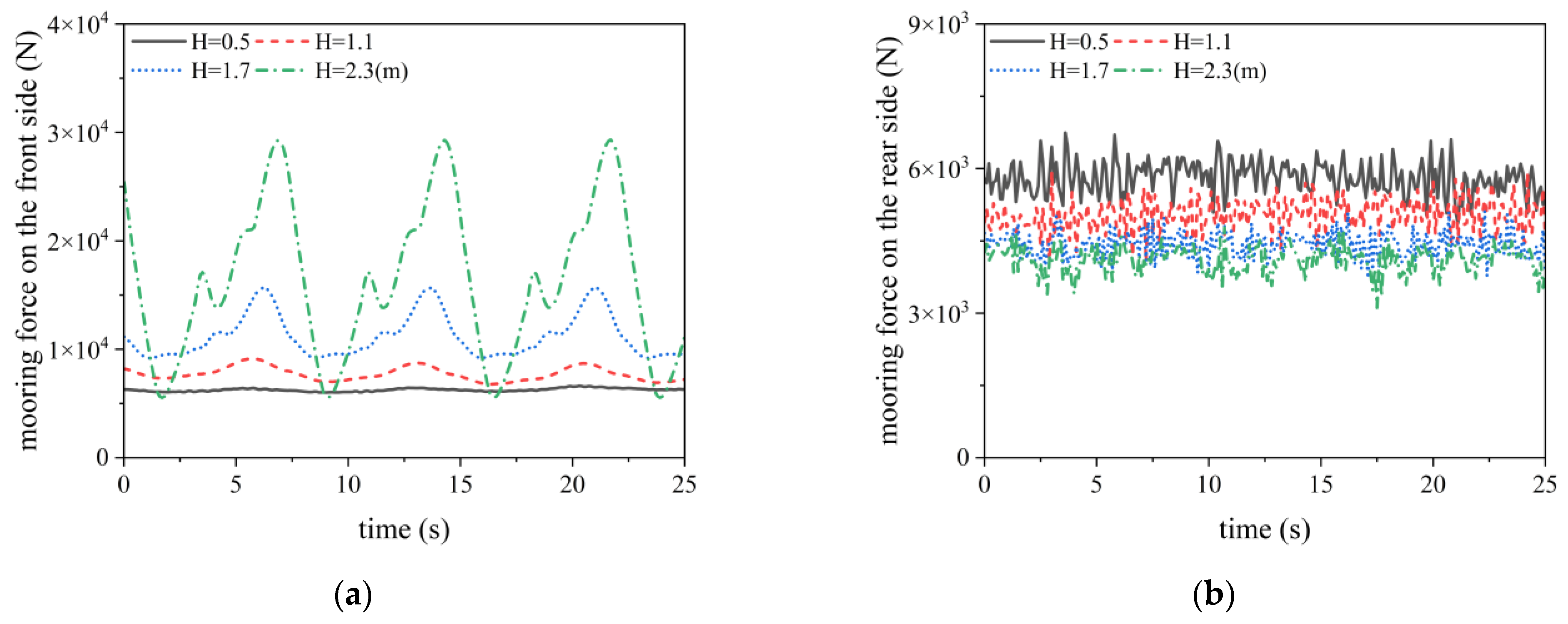
The variation of mooring forces on both sides of the FPV system is shown in Figure 23. It can be seen that the change in wave height has an effect on the morphology of the mooring force on the front side, and the maximum mooring force on the front side increases significantly with wave height. The reason for this result is that the increase in wave height leads to more intense motion of the floating platforms, which causes greater additional torque [19]. It should be noted that when the wave height is small (0.5 m), the variation of mooring force on the front side is approximately a straight line. In addition, the mooring force on the rear side does not exhibit obvious periodic characteristics and gradually decreases with the increase of wave height. However, it is much less than the mooring force on the front side, and the difference is about an order of magnitude. Therefore, it may not be a key consideration in design.
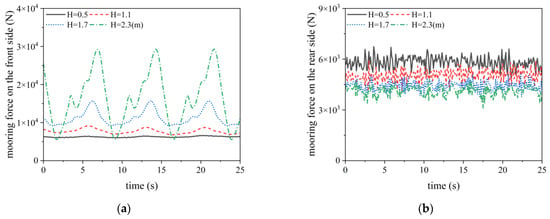
Figure 23.
Variation of mooring forces under waves with different wave heights, (a) mooring force on the front side, (b) mooring force on the rear side.
6. Conclusions
In this study, a single-row FPV system with 10 floating platforms is taken as the object of study, based on the potential theory, and the hydrodynamic coefficients of a single floating platform are calculated through AQWA software. Then, the acting mechanisms of wind, waves, and currents are explored. Finally, the influences of wave parameters, including wavelength and wave height, are investigated in detail. The main conclusions obtained are as follows:
- (1)
- The motion response of the floating platform is obvious under the wave with low frequency. As the wave frequency increases, the motion response decreases, in general, which means it can resist the waves for short periods. In addition, the design of the floating platform exhibits good seakeeping and stability under the moderate sea area of this study.
- (2)
- The influence of the wave on the dynamic response of the FPV system dominates under the moderate sea area of this study, with a contribution of up to 99%. The wind and currents mainly affect the motion and force in the X-direction of floating platforms in this study, and, due to the small dimension of the floating platform, the influence of wind and currents is very limited and can be ignored. In addition, the presence of currents affects the period of dynamic response.
- (3)
- When the wave height is constant, the motions of floating platforms and hinged joints increase at first and then decrease due to the resonance effect between the wave and the FPV system, and the variation mechanism in the connection forces with wavelength is the same. In addition, the wave forces gradually reduce due to the decrease in wave steepness (H/L). It should be pointed out that as the wavelength increases, the surge amplitudes of floating platforms increase at first, decrease later, and increase again as a whole.
- (4)
- When the wavelength is constant, the wave energy increases with wave height. Therefore, the motion and force of floating platforms and hinged joints in the FPV system exhibit significant enhancement. Nevertheless, the mooring force on the rear side decreases as the wave height increases. As it is significantly smaller than the mooring force on the front side, it may not be a key consideration in design.
This study focuses on the hydrodynamic interaction between waves and the FPV system, and the influences of wavelength and wave height are systematically explored. It should be noted that the FPV system with ten floating platforms is investigated, considering the fact that, in practical engineering, there will be tens or even hundreds of floating platforms connected in a row. Hence, a study on an FPV system with more structures should be carried out in the future. In addition, the waves applied in this study mainly focused on moderate waves, in which the turbulence, splash, and wave-in-deck are not involved. Nevertheless, for high waves from storms or typhoons, it is expected that the potential theory would present obvious deviation due to its limitation. In this case, a CFD-based software is more suitable for this kind of simulation, which needs further studies in the future.
Author Contributions
Writing-original draft preparation, J.S.; Methodology and software, H.I.; Conceptualization and funding acquisition, J.Y.; Writing-review and editing, S.Y. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Some or all data that support the findings of this study are available from the corresponding author upon reasonable request.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Li, S.; Wang, J.; Liu, Q.; Li, L.; Hua, Y.; Liu, W. Analysis of status of photovoltaic and wind power abandoned in China. J. Power Energy Eng. 2017, 5, 91. [Google Scholar] [CrossRef]
- Yousuf, H.; Khokhar, M.Q.; Zahid, M.A.; Kim, J.; Kim, Y.; Cho, E.C.; Yi, J. A Review on Floating PV Technology (FPVT). Curr. PV Res. 2020, 8, 67–78. [Google Scholar]
- Liu, H.; Kumar, A.; Reindl, T. The dawn of floating solar—Technology, benefits, and challenges. In WCFS2019; Springer: Singapore, 2020; pp. 373–383. [Google Scholar]
- Offshore Energy. Available online: https://www.offshore-energy.biz/sunseap-installs-one-of-worlds-largest-offshore-floating-solar-farms-in-singapore/ (accessed on 24 March 2021).
- Choi, S.M.; Lee, G.R.; Park, C.D.; Cho, S.H.; Lim, B.J. Wind load on the solar panel array of a floating PV system under extreme hurricane conditions. Sustain. Energy Technol. Assess. 2021, 48, 101616. [Google Scholar]
- Choi, S.M.; Park, C.D.; Cho, S.H.; Lim, B.J. Effects of wind loads on the solar panel array of a floating photovoltaic system–Experimental study and economic analysis. Energy 2022, 256, 124649. [Google Scholar] [CrossRef]
- Bei, Y.; Yuan, B.; Wu, Q. Numerical Simulation of Wind Load Characteristics of Floating PVs. In Proceedings of the 2022 5th International Conference on Energy, Electrical and Power Engineering (CEEPE), Chongqing, China, 22–24 April 2022; pp. 1104–1108. [Google Scholar]
- Wood, G.S.; Denoon, R.O.; Kwok, K.C. Wind loads on industrial solar panel arrays and supporting roof structure. Wind Struct. 2001, 4, 481–494. [Google Scholar] [CrossRef]
- Warsido, W.P.; Bitsuamlak, G.T.; Barata, J.; Chowdhury, A.G. Influence of spacing parameters on the wind loading of solar array. J. Fluids Struct. 2014, 48, 295–315. [Google Scholar] [CrossRef]
- Aly, A.M. On the evaluation of wind loads on solar panels: The scale issue. Sol. Energy 2016, 135, 423–434. [Google Scholar] [CrossRef]
- Shademan, M.; Hangan, H. Wind loading on solar panels at different azimuthal and inclination angles. In Proceedings of the Fifth International Symposium on Computational Wind Engineering, Chapel Hill, NC, USA, 23–27 May 2010. [Google Scholar]
- Bitsuamlak, G.T.; Dagnew, A.K.; Erwin, J. Evaluation of wind loads on solar panel modules using CFD. In Proceedings of the Fifth International Symposium on Computational Wind Engineering, Chapel Hill, NC, USA, 23–27 May 2010. [Google Scholar]
- Jubayer, C.M.; Hangan, H. A numerical approach to the investigation of wind loading on an array of ground mounted solar photovoltaic (PV) panels. J. Wind Eng. Ind. Aerodyn. 2016, 153, 60–70. [Google Scholar] [CrossRef]
- Honaryar, A.; Karimirad, M.; Abbasnia, A.; Whittaker, T. Wind Parameters Effects on Floating Solar Array Design–Case Study: Japan’s Largest Floating Solar Array. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, American Society of Mechanical Engineers 2022, Hamburg, Germany, 5–8 June 2022; Volume 85932, p. V008T09A008. [Google Scholar]
- Ikhennicheu, M.; Danglade, B.; Pascal, R.; Arramounet, V.; Trébaol, Q.; Gorintin, F. Analytical method for loads determination on floating solar farms in three typical environments. Sol. Energy 2021, 219, 34–41. [Google Scholar] [CrossRef]
- Kim, H.S.; Kim, B.W.; Won, Y.; Oh, Y.J.; Lee, J.; Hong, S.Y.; Park, J.J. Experimental Study on Structural Responses of Floating Photovoltaic System with Numerous Buoys and Connection Beams. In OCEANS 2021: San Diego–Porto; IEEE: Piscataway, NJ, USA, 2021; pp. 1–8. [Google Scholar]
- Lee, G.H.; Choi, J.W.; Seo, J.H.; Ha, H. Comparative study of effect of wind and wave load on floating PV: Computational simulation and design method. J. Korean Soc. Manuf. Process Eng. 2019, 18, 9–17. [Google Scholar] [CrossRef]
- Song, J.; Kim, J.; Chung, W.C.; Jung, D.; Kang, Y.J.; Kim, S. Wave-induced structural response analysis of the supporting frames for multiconnected offshore floating photovoltaic units installed in the inner harbor. Ocean Eng. 2023, 271, 113812. [Google Scholar] [CrossRef]
- Song, J.; Kim, J.; Lee, J.; Kim, S.; Chung, W. Dynamic response of multiconnected floating solar panel systems with vertical cylinders. J. Mar. Sci. Eng. 2022, 10, 189. [Google Scholar] [CrossRef]
- Al-Yacouby, A.M.; Halim ER, B.A.; Liew, M.S. Hydrodynamic analysis of floating offshore solar farms subjected to regular waves. In Advances in Manufacturing Engineering: Selected Articles from ICMMPE 2019; Springer: Singapore, 2020; pp. 375–390. [Google Scholar]
- Friel, D.; Karimirad, M.; Whittaker, T.; Doran, J. Hydrodynamic investigation of design parameters for a cylindrical type floating solar system. In Proceedings of the 4th International Conference on Renewable Energies Offshore, Lisbon, Portugal, 12–15 October 2020. [Google Scholar]
- Gharechae, A.; Ketabdari, M.J.; Kitazawa, D.; Li, Q. Semi-analytical and experimental study on array of elastic circular floaters vertical motions in regular sea waves. Ocean Eng. 2020, 217, 107851. [Google Scholar] [CrossRef]
- Zhang, D.; Du, J.; Yuan, Z.; Yu, S.; Li, H. Motion characteristics of large arrays of modularized floating bodies with hinge connections. Phys. Fluids 2023, 35, 077107. [Google Scholar]
- Wang, G.; Drimer, N.; Goldfeld, Y. Modular floating structures (MFS) for offshore dwelling a hydrodynamic analysis in the frequency domain. Ocean Eng. 2020, 216, 107996. [Google Scholar] [CrossRef]
- Nallayarasu, S.; Kumar, N.S. Experimental and numerical investigation on hydrodynamic response of buoy form spar under regular waves. Ships Offshore Struct 2017, 12, 19–31. [Google Scholar] [CrossRef]
- Rahmdel, S.; Wang, B.; Han, C.; Kim, K.; Park, S. A parametric study of spar-type floating offshore wind turbines (FOWTs) by numerical and experimental investigations. Ships Offshore Struct 2016, 11, 818–832. [Google Scholar] [CrossRef]
- Dnv, G.L. DNV-RP-C205: Environmental Conditions and Environmental Loads; Norw ay: DetNorske Veritas, 2010. [Google Scholar]
- Roussinova, V.; Balachandar, R. Open channel flow past a train of rib roughness. J. Turbul. 2011, 12, N28. [Google Scholar] [CrossRef]
- Ma, K.T.; Luo, Y.; Kwan CT, T.; Wu, Y. Mooring System Engineering for Offshore Structures; Gulf Professional Publishing: Houston, TX, USA, 2019. [Google Scholar]
- Ansys, A. AQWA Theory Manual; AQWA: Canonsburg, PA, USA, 2013. [Google Scholar]
- Barltrop, N.D.P. Floating Structures: A Guide for Design and Analysis; CMPT: Herefordshire, UK, 1998. [Google Scholar]
- Boccotti, P. Wave Mechanics for Ocean Engineering; Elsevier: Amsterdam, The Netherlands, 2000. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).