
Snapping Shrimp Noise Detection Based on Statistical Model

Abstract
:1. Introduction
Glossary
- (1)
- : hydrophone input signal;
- (2)
- : estimated input signal based on LP analysis;
- (3)
- : SSN signal;
- (4)
- : ambient noise signal;
- (5)
- : LP residual signal;
- (6)
- : -th linear coefficient;
- (7)
- : LP residual signal originating from SSN;
- (8)
- : LP residual signal originating from ambient noise.
2. Related Works
2.1. Linear Prediction Analysis
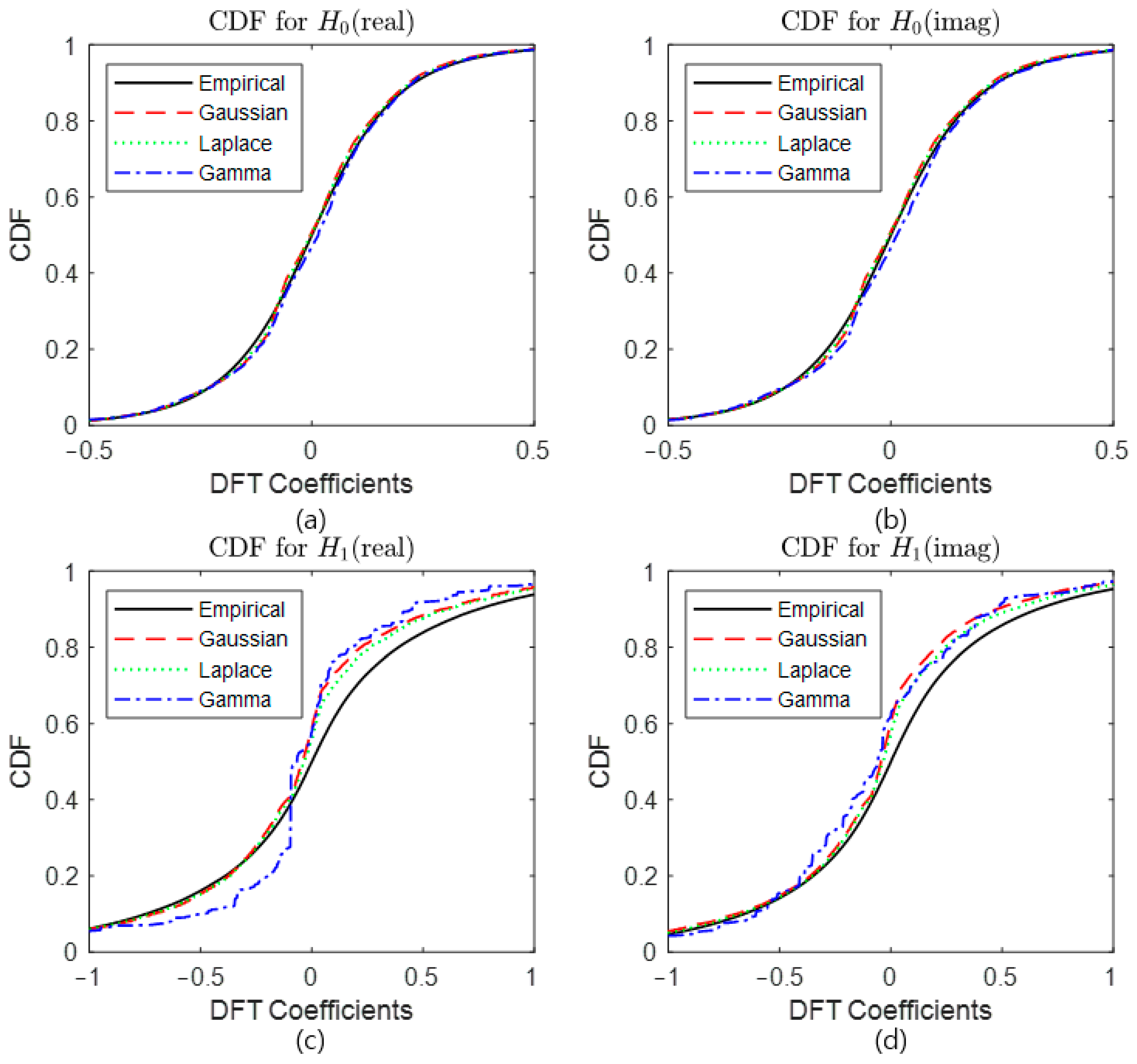
2.2. Goodness-of-Fit Test for Statistical Analysis
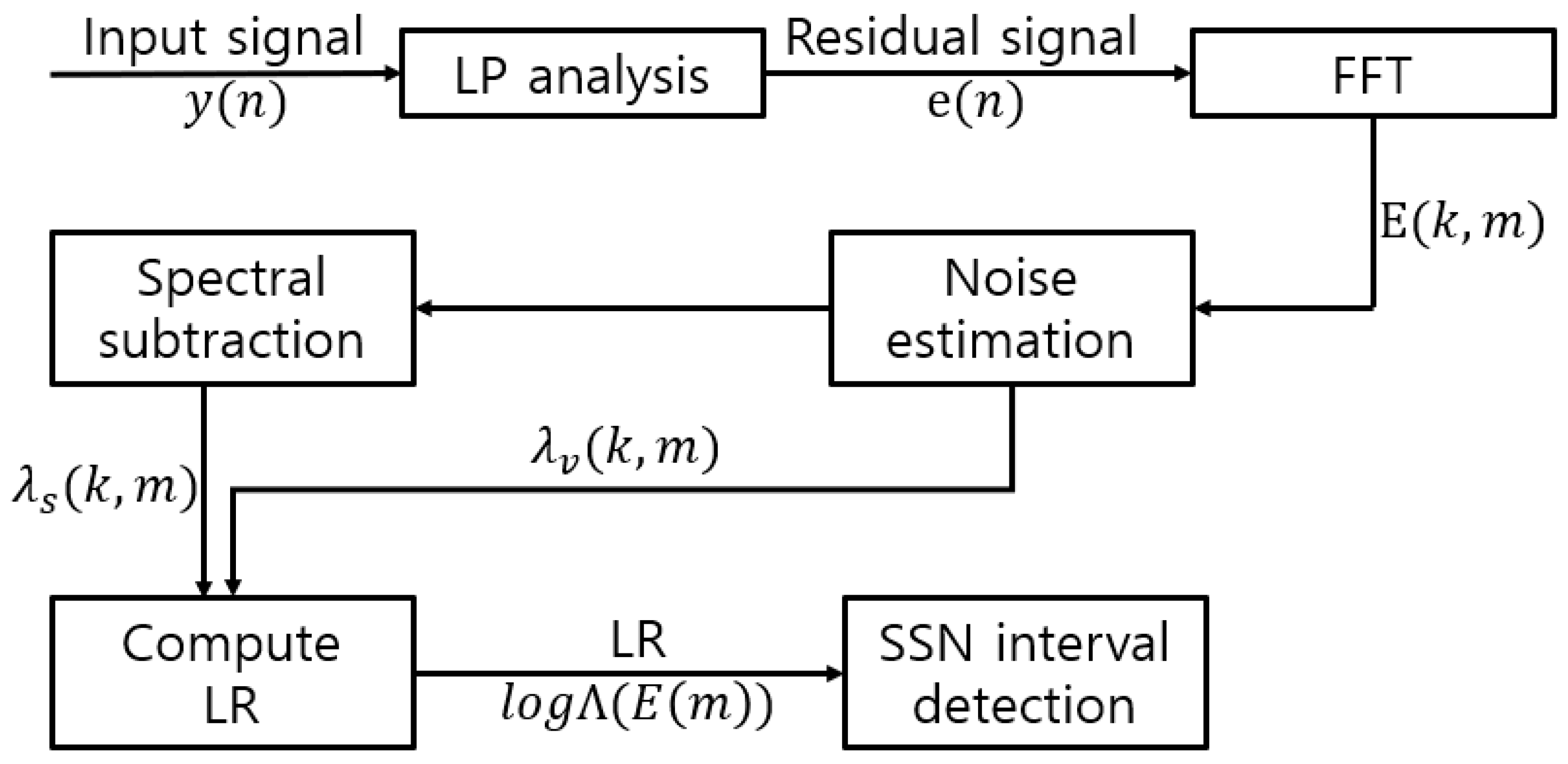
3. Proposed Method
3.1. Signal Modeling Using the LP Residual Signal
3.2. Goodness-of-Fit Test for the LP Residual Signal
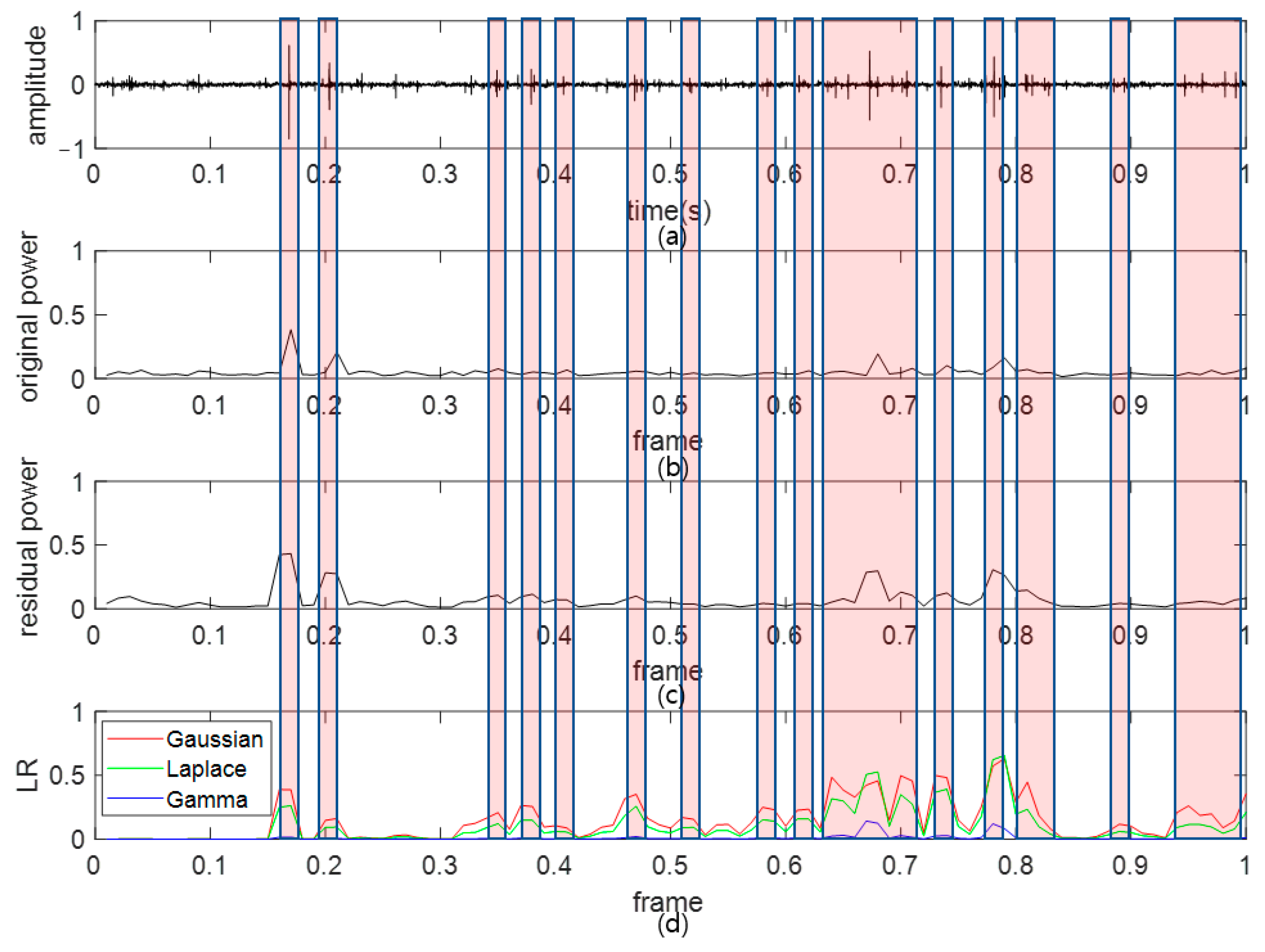
3.3. SSN Detection Using Likelihood Ratios
4. Experimental Results and Performance Assessment
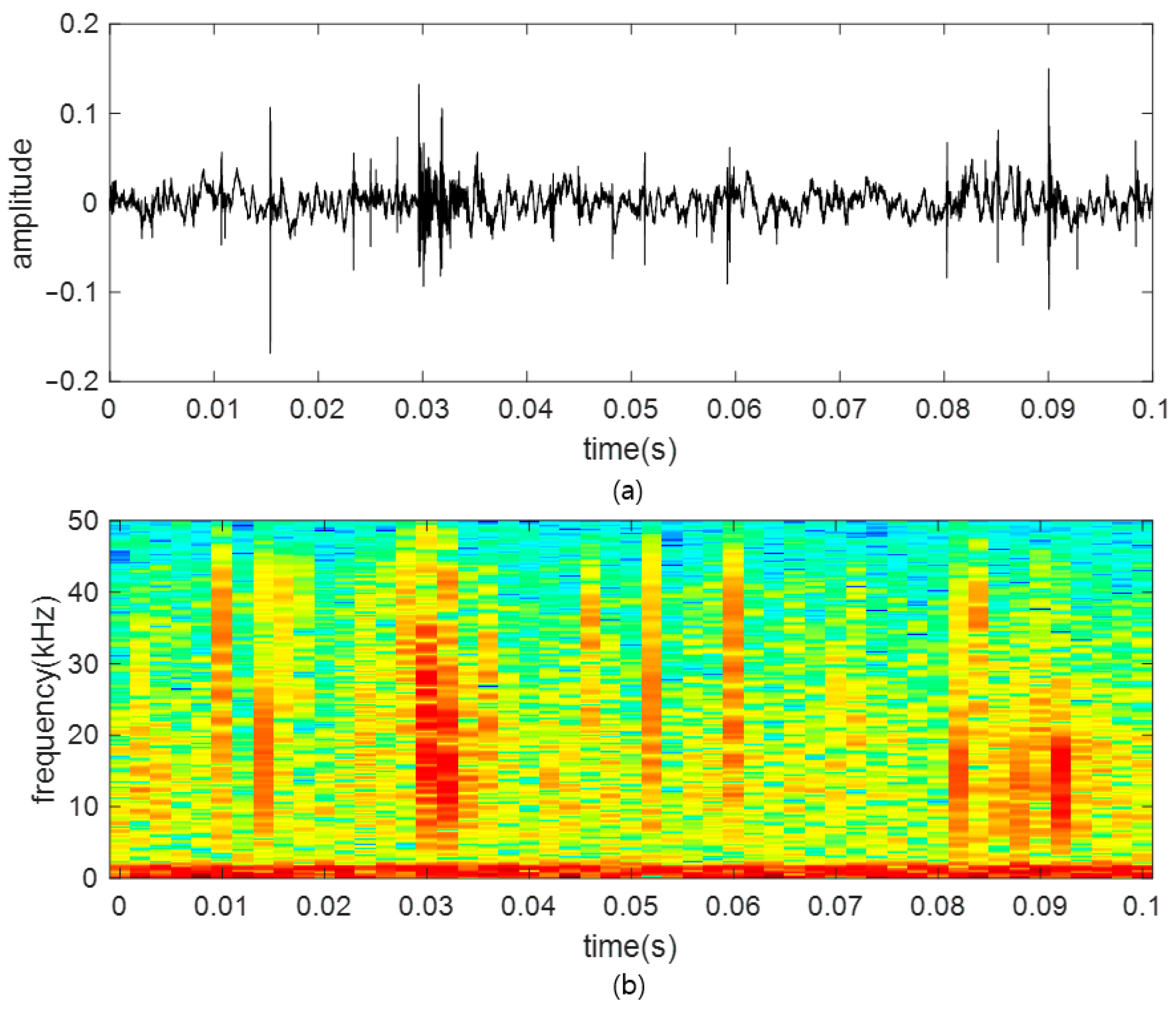
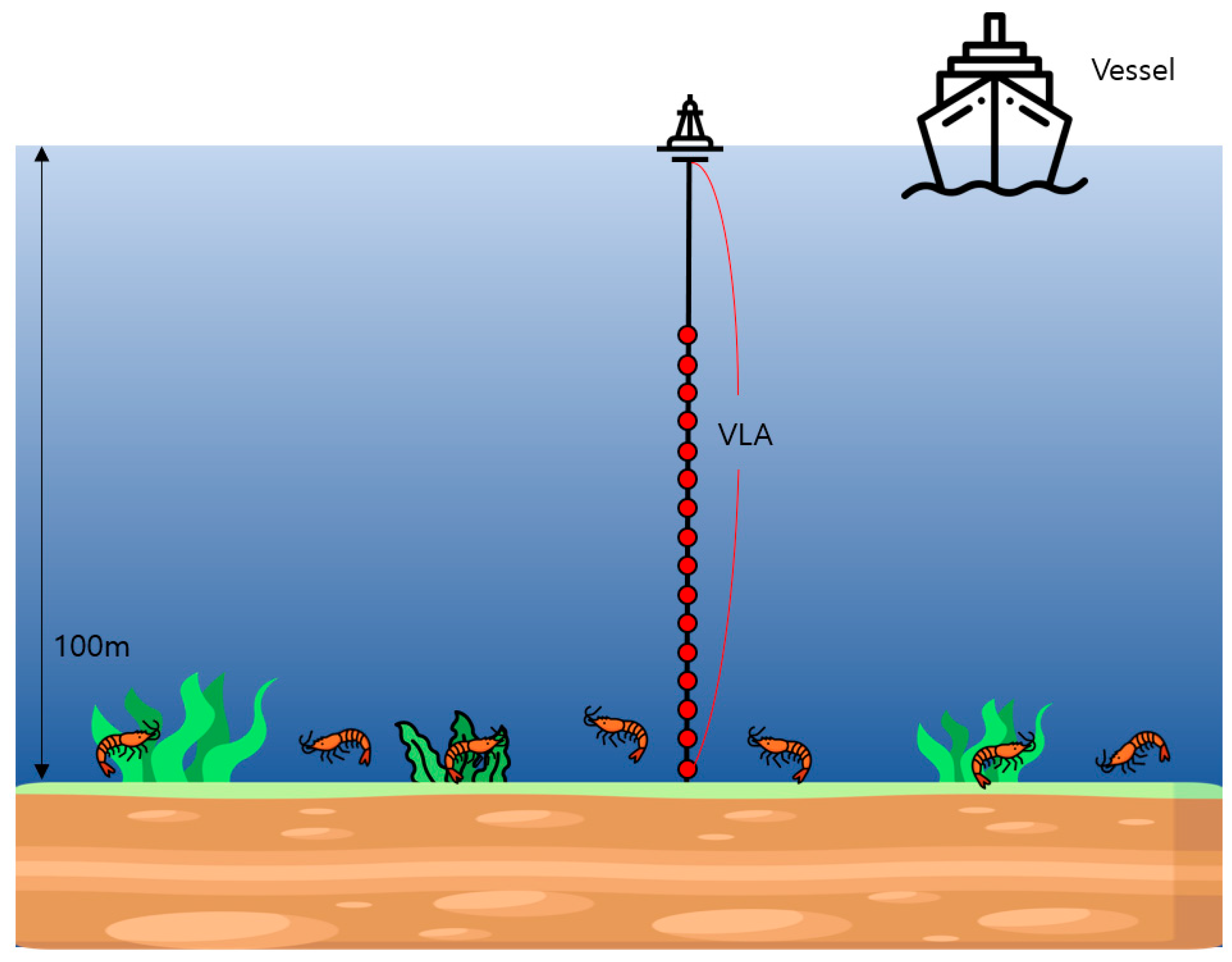
4.1. Experimental Environment
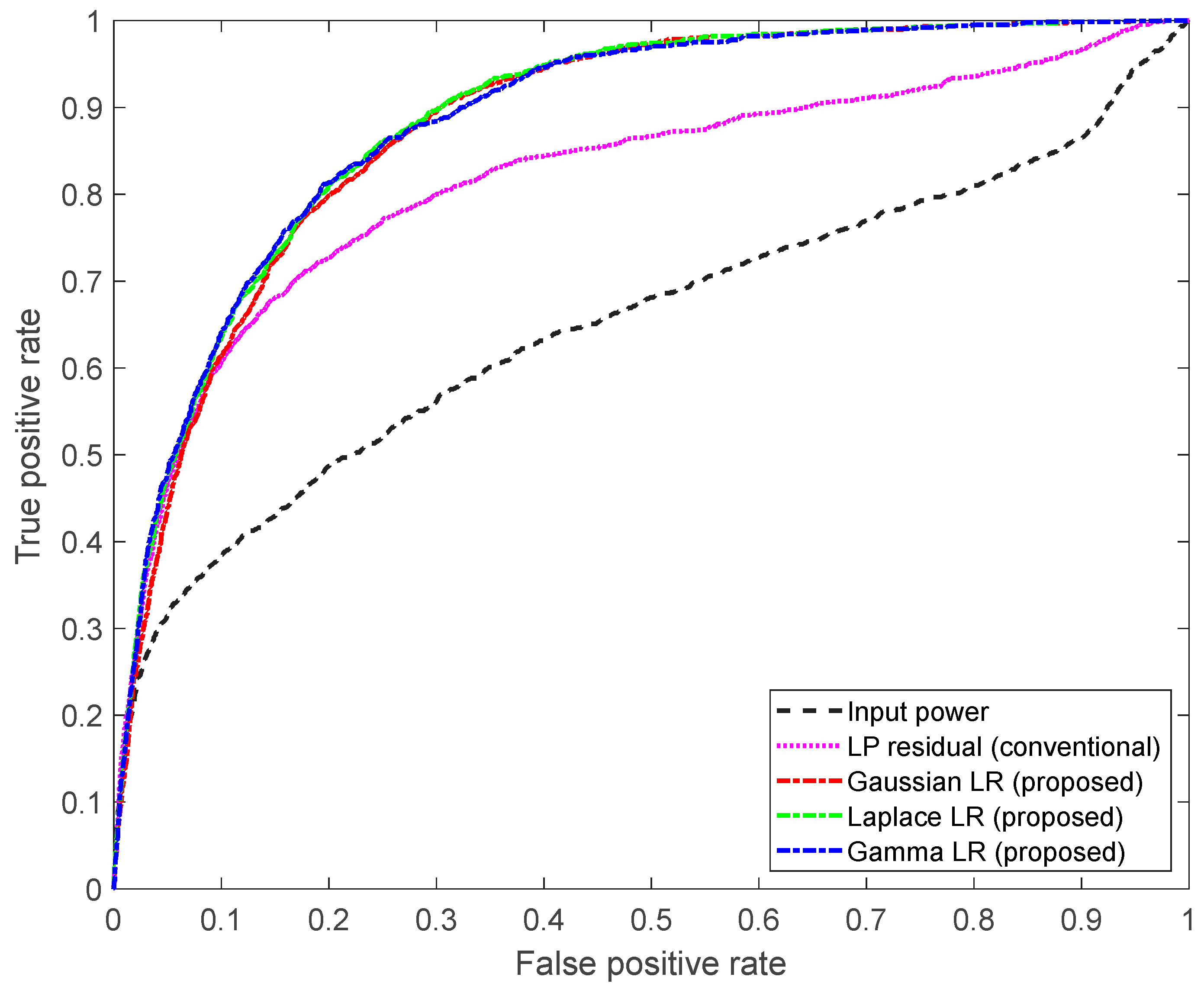
4.2. Performance Evaluation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Johnson, M.W.; Everest, F.A.; Young, R.W. The role of snapping shrimp (Crangon and Synalpheus) in the production of underwater noise in the sea. Biol. Bull. 1947, 93, 122–138. [Google Scholar] [CrossRef] [PubMed]
- Wicksten, M.K.; McClure, M.R. Snapping shrimps (Decapoda: Caridea: Alpheidae) from the Dampier Archipelago, western Australia. Rec. West. Aust. Mus. Suppl. 2007, 73, 61–83. [Google Scholar] [CrossRef]
- Everest, F.A.; Young, R.W.; Johnson, M.W. Acoustical characteristics of noise produced by snapping shrimp. J. Acoust. Soc. Am. 1948, 20, 137–142. [Google Scholar] [CrossRef]
- Versluis, M.; Schmitz, B.; Von der Heydt, A.; Lohse, D. How snapping shrimp snap: Through cavitating bubbles. Science 2000, 289, 2114–2117. [Google Scholar] [CrossRef] [PubMed]
- Beng, K.T.; Teck, T.E.; Chitre, M.; Potter, J.R. Estimating the spatial and temporal distribution of snapping shrimp using a portable, broadband 3-dimensional acoustic array. In Proceedings of the Oceans 2003, Celebrating the Past… Teaming toward the Future (IEEE Cat. No. 03CH37492), San Diego, CA, USA, 22–26 September 2003; Volume 5, pp. 2706–2713. [Google Scholar]
- Kim, B.N.; Hahn, J.; Cho, B.K.; Kim, B.C. Snapping shrimp sound measured under laboratory conditions. Jpn. J. Appl. Phys. 2010, 49, 07HG04. [Google Scholar] [CrossRef]
- Lee, D.H.; Choi, J.W.; Shin, S.; Song, H.C. Temporal Variability in Acoustic Behavior of Snapping Shrimp in the East China Sea and Its Correlation With Ocean Environments. Front. Mar. Sci. 2021, 8, 779283. [Google Scholar] [CrossRef]
- Lillis, A.; Mooney, T.A. Sounds of a changing sea: Temperature drives acoustic output by dominant biological sound-producers in shallow water habitats. Front. Mar. Sci. 2022, 9, 960881. [Google Scholar] [CrossRef]
- Zhou, Y.; Wang, R.; Yang, X.; Tong, F. Orthogonal Projection and Distributed Compressed Sensing Based Impulsive Noise Estimation for Underwater Acoustic OSDM Communication. IEEE Internet Things J. 2023, 10, 22279–22293. [Google Scholar] [CrossRef]
- Wang, S.; He, Z.; Niu, K.; Chen, P.; Rong, Y. New results on joint channel and impulsive noise estimation and tracking in underwater acoustic OFDM systems. IEEE Trans. on Wireless Commun. 2020, 19, 2601–2612. [Google Scholar] [CrossRef]
- Au, W.W.; Banks, K. The acoustics of the snapping shrimp Synalpheus parneomeris in Kaneohe Bay. J. Acoust. Soc. Am. 1998, 103, 41–47. [Google Scholar] [CrossRef]
- Loye, D.P.; Proudfoot, D.A. Underwater Noise to Marine Life. J. Acoust. Soc. Am. 1946, 18, 446–449. [Google Scholar] [CrossRef]
- Kim, B.N.; Choi, B.K.; Kim, B.C.; Jung, S.K.; Park, Y.; Lee, Y.K. Seawater temperature and wind speeds dependences and diurnal variation of ambient noise at the snapping shrimp colony. In Proceedings of the IEEE 2012 Oceans, Yeosu, Republic of Korea, 21–24 May 2012; pp. 1–3. [Google Scholar]
- Park, J.D.; Doherty, J.F. A steganographic app-roach to sonar tracking. IEEE J. Ocean. Eng. 2018, 44, 1213–1227. [Google Scholar] [CrossRef]
- Tsihrintzis, G.A.; Nikias, C.L. Performance of optimum and suboptimum receivers in the presence of impulsive noise modeled as an alpha-stable process. IEEE Trans. Commun. 1995, 43, 904–914. [Google Scholar] [CrossRef]
- Mahmood, A.; Chitre, M. Optimal and near-optimal detection in bursty impulsive noise. IEEE J. Ocean. Eng. 2017, 42, 639–653. [Google Scholar] [CrossRef]
- Guimaraes, D.A.; Chaves, L.S.; de Souza, R.A.A. Snapping shrimp noise reduction using convex optimization for underwater acoustic communication in warm shallow water. In Proceedings of the ITS, Sao Paulo, Brazil, 17–20 August 2014; pp. 1–5. [Google Scholar]
- Kim, H.; Seo, J.; Ahn, J.; Chung, J. Snapping shrimp noise mitigation based on statistical detection in underwater acoustic orthogonal frequency division multiplexing systems. Jpn. J. Appl. Phys. 2017, 56, 07JG02. [Google Scholar] [CrossRef]
- Ahn, J.; Lee, H.; Kim, Y.; Chung, J. Snapping shrimp noise detection and mitigation for underwater acoustic orthogonal frequency division multiple communication using multilayer frequency. Int. J. Nav. Archit. Ocean Eng. 2020, 12, 258–269. [Google Scholar] [CrossRef]
- Song, H.C.; Kim, S.M.; Kim, B.N.; Nam, S. Shallow-water acoustic variability experiment 2015 (SAVEX15) in the northern East China Sea. J. Acoust. Soc. Am. 2016, 140, 3012. [Google Scholar] [CrossRef]
- Park, J.; Hong, J. Snapping shrimp noise detection methods based on linear prediction analysis. IEEE Sens. J. 2023; to be published. [Google Scholar] [CrossRef]
- Chang, J.H.; Kim, N.S.; Mitra, S.K. Voice activity detection based on multiple statistical models. IEEE Trans. Signal Process. 2006, 54, 1965–1976. [Google Scholar] [CrossRef]
- Kim, N.S.; Chang, J.H. Spectral enhancement based on global soft decision. IEEE Signal Process. Lett. 2000, 7, 108–110. [Google Scholar]
- Glen, A.G.; Leemis, L.M.; Barr, D.R. Order statistics in goodness-of-fit testing. IEEE Trans. Reliab. 2001, 50, 209–213. [Google Scholar] [CrossRef]
- Makhoul, J. Linear prediction: A tutorial review. Proc. IEEE 1975, 63, 561–580. [Google Scholar] [CrossRef]
- Hayes, M.H. Statistical Digital Signal Processing and Modeling; John Wiley & Sons: Hoboken, NJ, USA, 1996. [Google Scholar]
- Reininger, R.; Gibson, J. Distributions of the two dimensional DCT coefficients for images. IEEE Trans. Commun. 1983, 31, 835–839. [Google Scholar] [CrossRef]
- Cohen, I.; Berdugo, B. Noise estimation by minima controlled recursive averaging for robust speech enhancement. IEEE Signal Process. Lett. 2002, 9, 12–15. [Google Scholar] [CrossRef]
- Boll, S. Suppression of acoustic noise in speech using spectral subtraction. IEEE Trans. Acoust. Speech Signal Process. 1979, 27, 113–120. [Google Scholar] [CrossRef]
- Hanley, J.A.; McNeil, B.J. The meaning and use of the area under a receiver operating characteristic (ROC) curve. Radiology 1982, 143, 29–36. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| KS Statistics | ||||
|---|---|---|---|---|
| Gaussian | 0.0297 | 0.0260 | 0.1350 | 0.1396 |
| Laplace | 0.0214 | 0.0196 | 0.1007 | 0.1012 |
| Gamma | 0.0378 | 0.0477 | 0.1612 | 0.1295 |
| Input Power | LP Residual [21] | Gaussian LR | Laplace LR | Gamma LR | |
|---|---|---|---|---|---|
| AUC | 0.6513 | 0.8182 | 0.8802 | 0.8857 | 0.8844 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, S.; Seok, J.; Hong, J. Snapping Shrimp Noise Detection Based on Statistical Model. J. Mar. Sci. Eng. 2024, 12, 42. https://doi.org/10.3390/jmse12010042
Park S, Seok J, Hong J. Snapping Shrimp Noise Detection Based on Statistical Model. Journal of Marine Science and Engineering. 2024; 12(1):42. https://doi.org/10.3390/jmse12010042
Chicago/Turabian StylePark, Suhyeon, Jongwon Seok, and Jungpyo Hong. 2024. "Snapping Shrimp Noise Detection Based on Statistical Model" Journal of Marine Science and Engineering 12, no. 1: 42. https://doi.org/10.3390/jmse12010042