
Performance Analysis of a WPCN-Based Underwater Acoustic Communication System


Abstract
:1. Introduction
1.1. Related Work
1.2. Motivation and Contributions
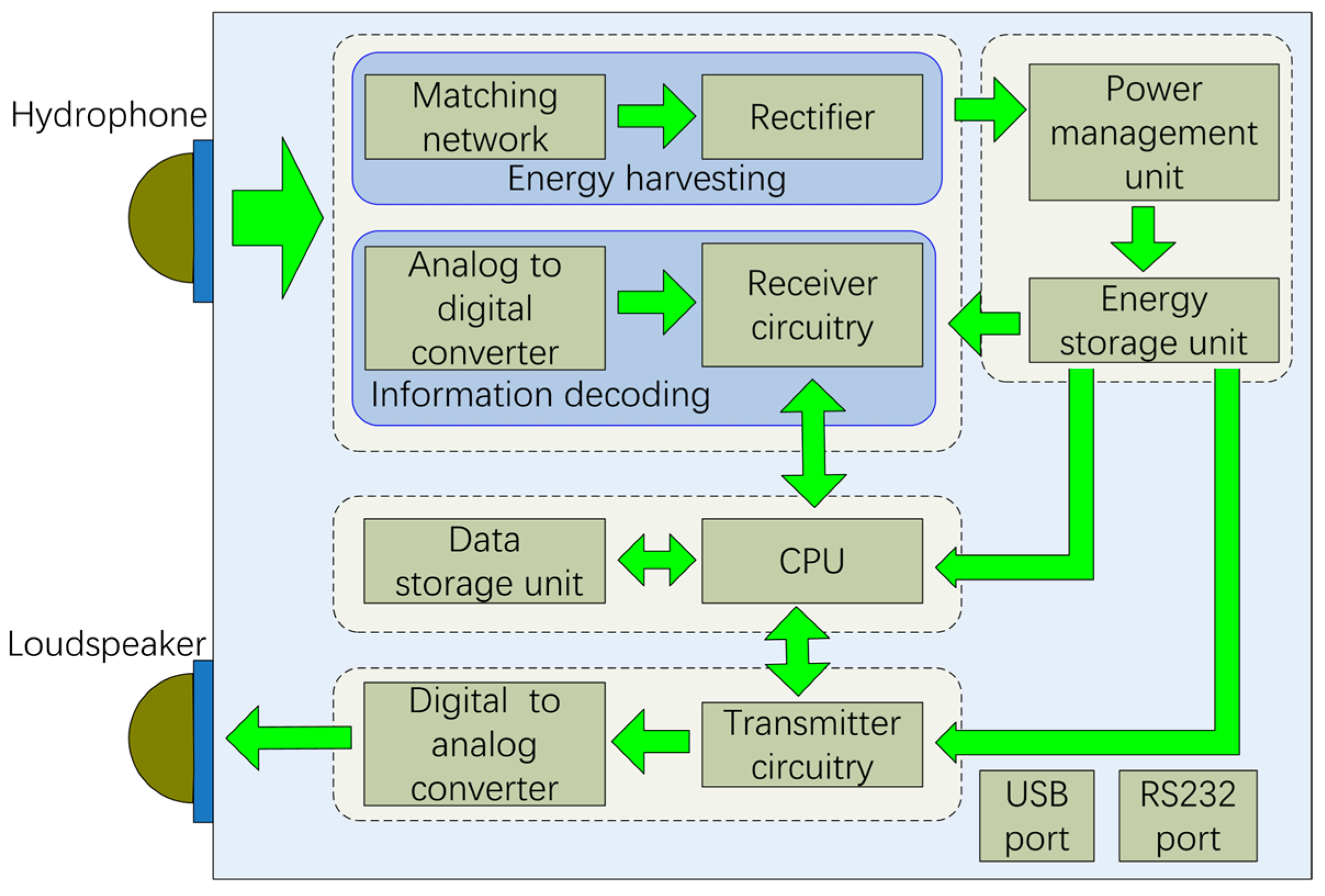
- We present an application of WPCN to the UWAC systems to provide an auxiliary and convenient energy supplement for solving the energy-limited problem of underwater acoustic nodes, where the H-AP transfers energy to the terminal node in the downlink while the hydrophone of the terminal node exploits the received acoustical signal and ambient noise for energy harvesting. The harvested energy at the terminal node is then used for the information transmission in the uplink;
- We analyze the average BER, outage probability, and achievable rate performance for the WPCN-based UWAC systems in the frequency-selective sparse channel and non-white noise environments. We first derive the closed-form expression for the probability density function (PDF) of the received signal-to-noise ratio (SNR) at the H-AP in the uplink. Based on this, we further derive closed-form expressions of the average BER and outage probability of the systems, which are used in the discussion for the effects of system and channel parameters on the system performance;
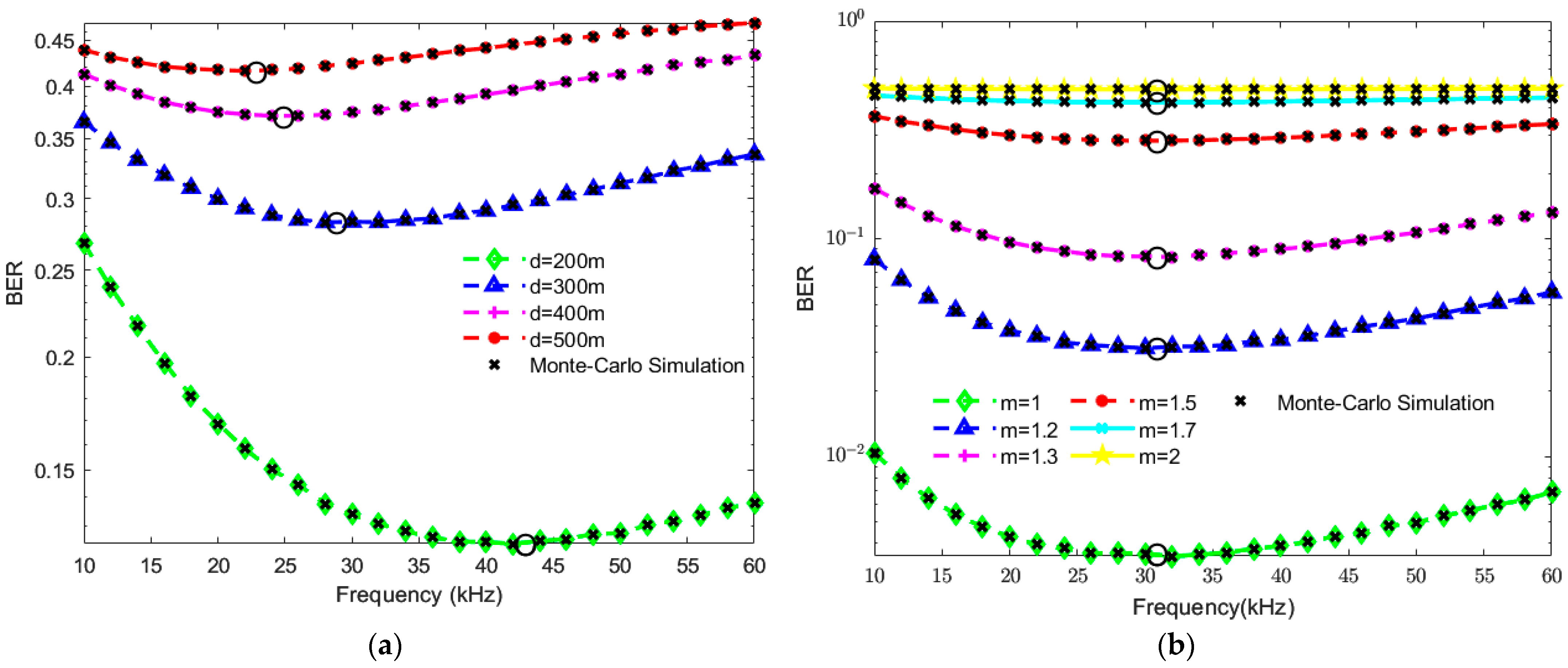
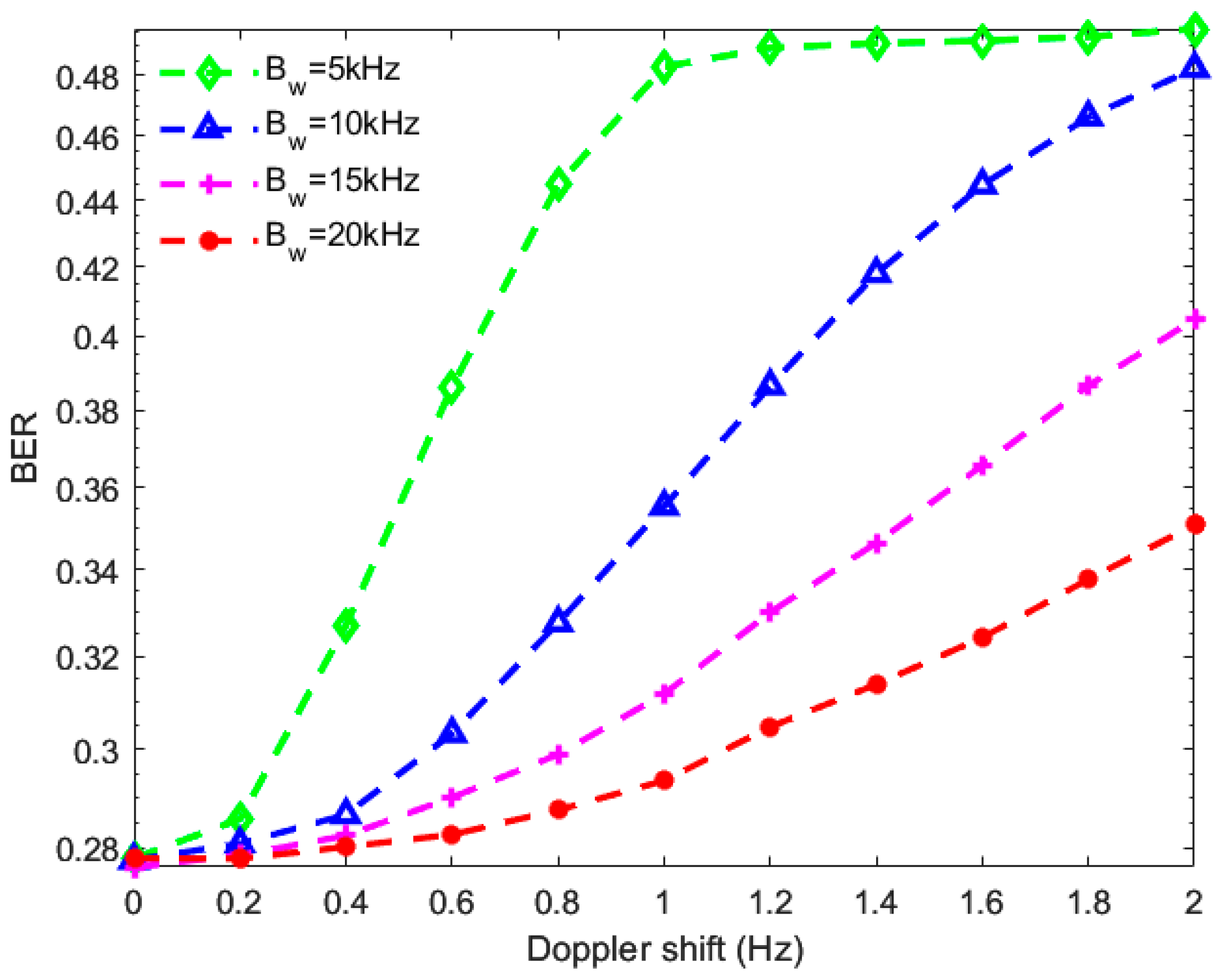
- We investigate the impacts of the transmission distance, signal frequency, spreading factor, and time allocation factor on the system’s performance. It is demonstrated that there exist optimal signal frequency and time allocation factors to minimize the average BER and maximize the achievable information rate for the system, respectively. Moreover, a larger optimal time allocation factor is preferred for a smaller H-AP transmit power or a larger transmission distance, while a smaller optimal signal frequency is required for a larger transmission distance.
2. System Model
2.1. Hardware Architecture of the WPCN-Based Underwater Acoustic Terminal Node
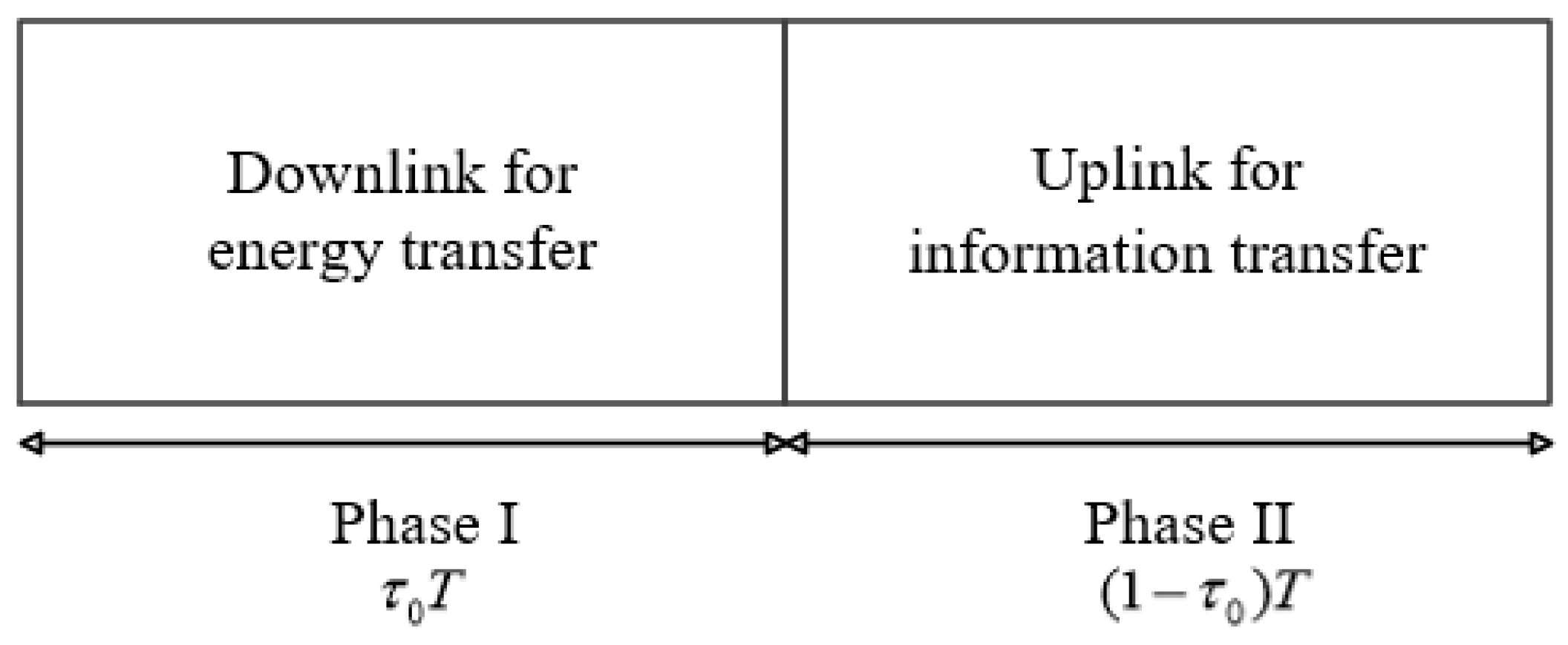
2.2. Transmit Protocol
2.3. Channel Model
2.4. Receiver
3. Performance Analysis
3.1. Instantaneous SNR and Its PDF
3.2. Average BER
3.3. Outage Probability
4. Numerical Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rahmati, M.; Pompili, D. UNISeC: Inspection, separation, and classification of underwater acoustic noise point sources. IEEE J. Ocean. Eng. 2017, 43, 777–791. [Google Scholar] [CrossRef]
- Han, M.; Duan, J.; Khairy, S.; Cai, L.X. Enabling sustainable underwater IoT networks with energy harvesting: A decentralized reinforcement learning approach. IEEE Internet Things J. 2020, 7, 9953–9964. [Google Scholar] [CrossRef]
- Ju, H.; Zhang, R. Throughput maximization in wireless powered communication networks. IEEE Trans. Wirel. Commun. 2013, 13, 418–428. [Google Scholar] [CrossRef]
- Bi, S.; Zeng, Y.; Zhang, R. Wireless powered communication networks: An overview. IEEE Wirel. Commun. 2016, 23, 10–18. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, Z.; Chen, H.-H.; Zhang, H. Enhancing wireless information and power transfer by exploiting multi-antenna techniques. IEEE Commun. Mag. 2015, 53, 133–141. [Google Scholar] [CrossRef]
- Yi, F.; Fei, J. Wireless Information and Power Transfer in Underwater Acoustic Sensor Networks. China Commun. 2020; accepted. [Google Scholar]
- Liu, F.; Phipps, A.; Horowitz, S.; Ngo, K.; Cattafesta, L.; Nishida, T.; Sheplak, M. Acoustic energy harvesting using an electromechanical Helmholtz resonator. J. Acoust. Soc. Am. 2008, 123, 1983–1990. [Google Scholar] [CrossRef] [PubMed]
- Radosevic, A.; Ahmed, R.; Duman, T.M.; Proakis, J.G.; Stojanovic, M. Adaptive OFDM modulation for underwater acoustic communications: Design considerations and experimental results. IEEE J. Ocean. Eng. 2013, 39, 357–370. [Google Scholar] [CrossRef]
- Stojanovic, M. OFDM for underwater acoustic communications: Adaptive synchronization and sparse channel estimation. In Proceedings of the 2008 IEEE International Conference on Acoustics, Speech and Signal Processing, Las Vegas, NV, USA, 31 March–4 April 2008; pp. 5288–5291. [Google Scholar]
- Cao, R.; Yang, L.; Qu, F. On the capacity and system design of relay-aided underwater acoustic communications. In Proceedings of the 2010 IEEE Wireless Communication and Networking Conference, Sydney, NSW, Australia, 18–21 April 2010; pp. 1–6. [Google Scholar]
- Al-Dharrab, S.; Muqaibel, A.; Uysal, M. Performance of multicarrier cooperative communication systems over underwater acoustic channels. IET Commun. 2017, 11, 1941–1951. [Google Scholar] [CrossRef]
- Bouvet, P.-J.; Auffret, Y. On the achievable rate of multiple-input–multiple-output underwater acoustic communications. IEEE J. Ocean. Eng. 2019, 45, 1126–1137. [Google Scholar] [CrossRef]
- Chen, K.; Ma, M.; Cheng, E.; Yuan, F.; Su, W. A survey on MAC protocols for underwater wireless sensor networks. IEEE Commun. Surv. Tutor. 2014, 16, 1433–1447. [Google Scholar] [CrossRef]
- Jiang, S. State-of-the-art medium access control (MAC) protocols for underwater acoustic networks: A survey based on a MAC reference model. IEEE Commun. Surv. Tutor. 2017, 20, 96–131. [Google Scholar] [CrossRef]
- Rajasoundaran, S.; Kumar, S.S.; Selvi, M.; Thangaramya, K.; Arputharaj, K. Secure and optimized intrusion detection scheme using LSTM-MAC principles for underwater wireless sensor networks. Wirel. Netw. 2023, 1–23. [Google Scholar] [CrossRef]
- Guo, J.; Song, S.; Liu, J.; Chen, H.; Cui, J.-H.; Han, G. A Hybrid NOMA-Based MAC Protocol for Underwater Acoustic Networks. IEEE/ACM Trans. Netw. 2023, 1–14. [Google Scholar] [CrossRef]
- Rice, J.; Creber, B.; Fletcher, C.; Baxley, P.; Rogers, K.; McDonald, K.; Rees, D.; Wolf, M.; Merriam, S.; Mehio, R. Evolution of seaweb underwater acoustic networking. In Proceedings of the OCEANS 2000 MTS/IEEE Conference and Exhibition, Conference Proceedings (Cat. No. 00CH37158). Providence, RI, USA, 11–14 September 2000; pp. 2007–2017. [Google Scholar]
- Melodia, T.; Kulhandjian, H.; Kuo, L.C.; Demirors, E. Advances in underwater acoustic networking. In Mobile Ad Hoc Networking: Cutting Edge Directions; Wiley: Hoboken, NJ, USA, 2013; pp. 804–852. [Google Scholar]
- Dol, H.; Blom, K.; Sotnik, D.; Nissen, I.; Otnes, R.; Komulainen, A.; Campagnaro, F. EDA-SALSA: Development of a self-reconfigurable protocol stack for robust underwater acoustic networking. In Proceedings of the OCEANS 2023-Limerick, Limerick, Ireland, 5–8 June 2023; pp. 1–10. [Google Scholar]
- Lu, W.; Cui, H.; Ling, D. Design and research of underwater acoustic communication system. In Proceedings of the International Conference on Signal Processing and Communication Technology (SPCT 2022), Harbin, China, 23–25 December 2022; pp. 418–423. [Google Scholar]
- Chaffey, M.; Bird, L.; Erickson, J.; Graybeal, J.; Hamilton, A.; Headley, K.; Kelley, M.; McBride, L.; Mellinger, E.; Meese, T. MBARI’s buoy based seafloor observatory design. In Proceedings of the Oceans’ 04 MTS/IEEE Techno-Ocean’04 (IEEE Cat. No. 04CH37600), Kobe, Japan, 9–12 November 2004; pp. 1975–1984. [Google Scholar]
- Wang, R.; Makled, E.A.; Yadav, A.; Dobre, O.A.; Zhao, R. Reinforcement learning-based energy-efficient power allocation for underwater full-duplex relay network with energy harvesting. In Proceedings of the 2020 IEEE 92nd Vehicular Technology Conference (VTC2020-Fall), Victoria, BC, Canada, 18 November–16 December 2020; pp. 1–5. [Google Scholar]
- Zhang, B.; Xu, W.; Lu, C.; Lu, Y.; Wang, X. Review of low-loss wireless power transfer methods for autonomous underwater vehicles. IET Power Electron. 2022, 15, 775–788. [Google Scholar] [CrossRef]
- Chen, F.; Zhang, J.; Cui, S.; Bie, Z.; Zhu, C. A Novel Pendulum-Type Magnetic Coupler with High Misalignment Tolerance for AUV Underwater Wireless Power Transfer Systems. IEEE Trans. Power Electron. 2023, 38, 14861–14871. [Google Scholar]
- Kesari Mary, D.R.; Ko, E.; Yoon, D.J.; Shin, S.-Y.; Park, S.-H. Energy Optimization Techniques in Underwater Internet of Things: Issues, State-of-the-Art, and Future Directions. Water 2022, 14, 3240. [Google Scholar] [CrossRef]
- Huang, C.-J.; Wang, Y.-W.; Liao, H.-H.; Lin, C.-F.; Hu, K.-W.; Chang, T.-Y. A power-efficient routing protocol for underwater wireless sensor networks. Appl. Soft Comput. 2011, 11, 2348–2355. [Google Scholar] [CrossRef]
- Nguyen, T.H.; Shin, S.-Y.; Park, S.-H. Efficiency reservation MAC protocol for underwater acoustic sensor networks. In Proceedings of the 2008 Fourth International Conference on Networked Computing and Advanced Information Management, Gyeongju, Republic of Korea, 2–4 September 2008; pp. 365–370. [Google Scholar]
- Guida, R.; Demirors, E.; Dave, N.; Melodia, T. Underwater ultrasonic wireless power transfer: A battery-less platform for the internet of underwater things. IEEE Trans. Mob. Comput. 2022, 21, 1861–1873. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, T.; Geng, Y.; An, T. Underwater Wireless High-Efficiency Energy Transmission Method Based on the Ultrasonic Transducer Array. In Proceedings of the 2021 IEEE 21st International Conference on Communication Technology (ICCT), Tianjin, China, 13–16 October 2021; pp. 192–197. [Google Scholar]
- Varshney, L.R. Transporting information and energy simultaneously. In Proceedings of the 2008 IEEE International Symposium on Information Theory, Toronto, ON, Canada, 6–11 July 2008; pp. 1612–1616. [Google Scholar]
- Zhou, X.; Zhang, R.; Ho, C.K. Wireless information and power transfer: Architecture design and rate-energy tradeoff. IEEE Trans. Commun. 2013, 61, 4754–4767. [Google Scholar] [CrossRef]
- Ju, H.; Zhang, R. User cooperation in wireless powered communication networks. In Proceedings of the 2014 IEEE Global Communications Conference, Austin, TX, USA, 8–12 December 2014; pp. 1430–1435. [Google Scholar]
- Zhong, C.; Chen, X.; Zhang, Z.; Karagiannidis, G.K. Wireless-powered communications: Performance analysis and optimization. IEEE Trans. Commun. 2015, 63, 5178–5190. [Google Scholar] [CrossRef]
- Ji, T.; Hua, M.; Li, C.; Huang, Y.; Yang, L. Exploiting Intelligent Reflecting Surface for Enhancing Full-Duplex Wireless-Powered Communication Networks. IEEE Trans. Commun. 2023, 1. [Google Scholar] [CrossRef]
- Hu, G.; Cai, Y. Energy-accumulation-based power-beacon-assisted WPCN: Time allocation and scheduling schemes. IEEE Commun. Lett. 2019, 23, 1510–1514. [Google Scholar] [CrossRef]
- Doosti-Aref, A.; Ebrahimzadeh, A. Adaptive relay selection and power allocation for OFDM cooperative underwater acoustic systems. IEEE Trans. Mob. Comput. 2017, 17, 1–15. [Google Scholar] [CrossRef]
- Domínguez-Bolaño, T.; Rodríguez-Piñeiro, J.; García-Naya, J.A.; Castedo, L. Bit error probability and capacity bound of OFDM systems in deterministic doubly-selective channels. IEEE Trans. Veh. Technol. 2020, 69, 11458–11469. [Google Scholar] [CrossRef]
- Qarabaqi, P.; Stojanovic, M. Statistical characterization and computationally efficient modeling of a class of underwater acoustic communication channels. IEEE J. Ocean. Eng. 2013, 38, 701–717. [Google Scholar] [CrossRef]
- Stojanovic, M. On the relationship between capacity and distance in an underwater acoustic communication channel. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2007, 11, 34–43. [Google Scholar] [CrossRef]
- Coates, R.F.; Coates, R. Underwater Acoustic Systems; Springer: Berlin/Heidelberg, Germany, 1990. [Google Scholar]
- Feng, Y.; Wen, M.; Ji, F.; Leung, V.C. Performance analysis for BDPSK modulated SWIPT cooperative systems with nonlinear energy harvesting model. IEEE Access 2018, 6, 42373–42383. [Google Scholar] [CrossRef]
- Papoulis, A.; Unnikrishna Pillai, S. Probability, Random Variables and Stochastic Processes; McGraw-Hill Europe: New York, NY, USA, 2002. [Google Scholar]
- Shankar, P.M. Fading and Shadowing in Wireless Systems; Springer: New York, NY, USA, 2012. [Google Scholar]
- Simon, M.K.; Alouini, M. A unified approach to the performance analysis of digital communication over generalized fading channels. Proc. IEEE 1998, 86, 1860–1877. [Google Scholar] [CrossRef]
- Sileh, I.K.; Xiang, W.; Alajel, K.M. Outage probability of unequal block-based OFDM amplify-and-forward relay protocol over wideband channels. In Proceedings of the 2012 International Symposium on Communications and Information Technologies (ISCIT), Gold Coast, QLD, Australia, 2–5 October 2012; pp. 599–603. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Transmit Power (W) | Transmission Distance (m) | ) | Harvested Power (mW) |
|---|---|---|---|
| 20 | 100 | 163.1 | 36.3 |
| 30 | 100 | 164.8 | 38.2 |
| 40 | 100 | 166.1 | 39.8 |
| 20 | 200 | 158.8 | 30.2 |
| 30 | 200 | 160.6 | 32.9 |
| 40 | 200 | 161.8 | 34.4 |
| 20 | 300 | 155.9 | 27.9 |
| 30 | 300 | 157.7 | 29.0 |
| 40 | 300 | 158.9 | 30.3 |
| Parameters | Symbol | Value |
|---|---|---|
| Spreading factor | 1.5 | |
| Shipping activity factor | 0.5 | |
| Wind speed | 3 m/s | |
| Downlink OFDM subcarrier number | 32 | |
| Uplink OFDM subcarrier number | 32 | |
| Number of multipaths | 5 | |
| Multipath delay | 0, 0.3, 0.5, 0.6, 0.8 ms | |
| Outage rate threshold | bps/Hz | |
| Energy conversion efficiency | 0.8 | |
| Signal center frequency | 10 kHz | |
| Signal bandwidth | 10 kHz | |
| Time allocation factor | 0.8 | |
| Speed of sound in the water | 1500 m/s | |
| Doppler shift | 0 Hz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xing, R.; Zhang, Y.; Feng, Y.; Ji, F. Performance Analysis of a WPCN-Based Underwater Acoustic Communication System. J. Mar. Sci. Eng. 2024, 12, 43. https://doi.org/10.3390/jmse12010043
Xing R, Zhang Y, Feng Y, Ji F. Performance Analysis of a WPCN-Based Underwater Acoustic Communication System. Journal of Marine Science and Engineering. 2024; 12(1):43. https://doi.org/10.3390/jmse12010043
Chicago/Turabian StyleXing, Ronglin, Yuhang Zhang, Yizhi Feng, and Fei Ji. 2024. "Performance Analysis of a WPCN-Based Underwater Acoustic Communication System" Journal of Marine Science and Engineering 12, no. 1: 43. https://doi.org/10.3390/jmse12010043
APA StyleXing, R., Zhang, Y., Feng, Y., & Ji, F. (2024). Performance Analysis of a WPCN-Based Underwater Acoustic Communication System. Journal of Marine Science and Engineering, 12(1), 43. https://doi.org/10.3390/jmse12010043