
Hydrodynamic Interactions between Ships in a Fleet



Abstract
:1. Introduction
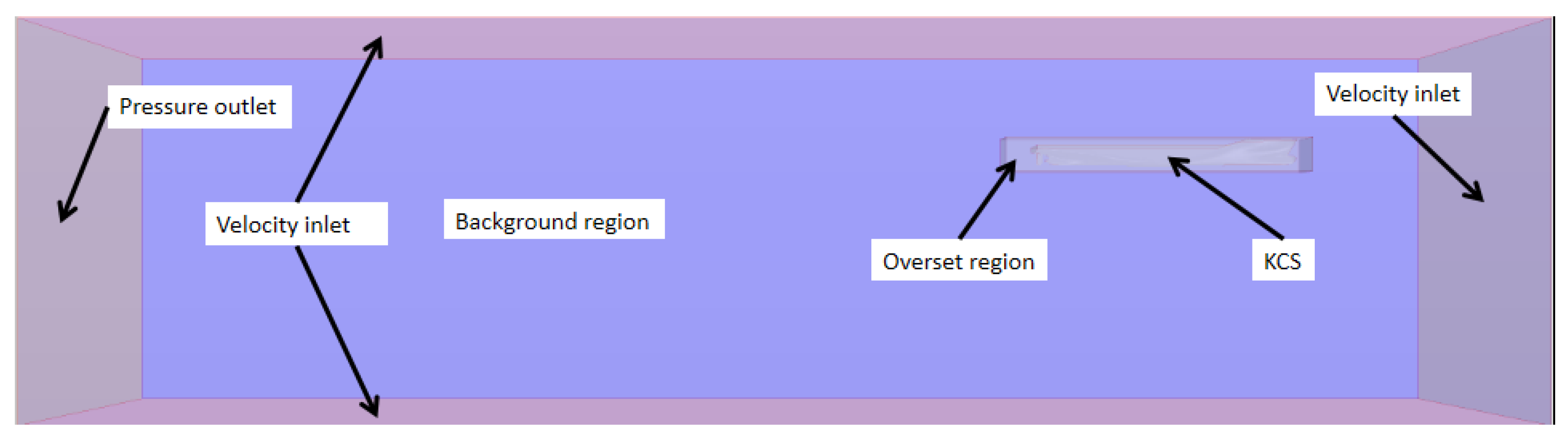
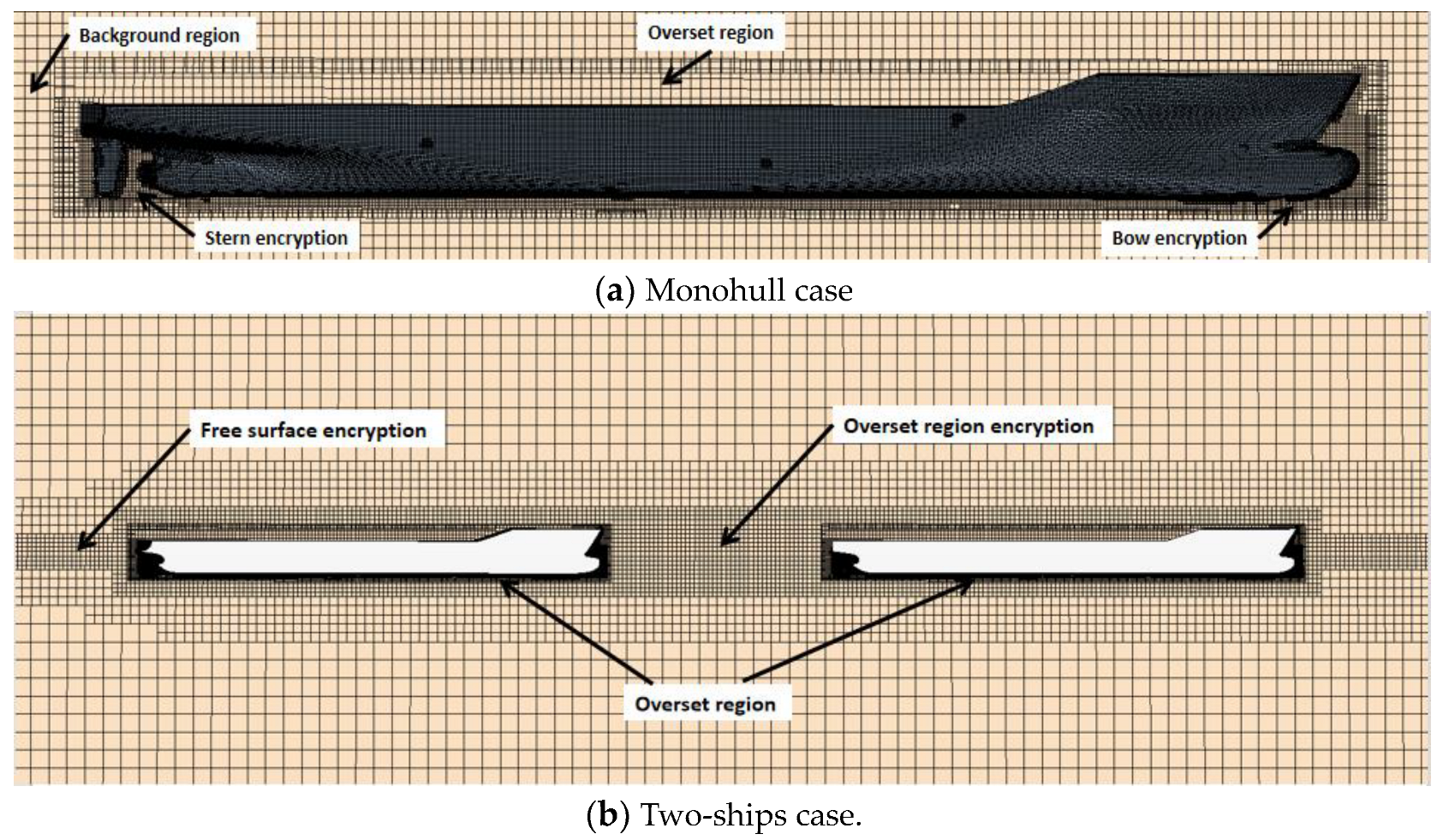
2. Numerical Modelling
3. Numerical Calculations and Results Analysis
3.1. Simulation Condition Setting
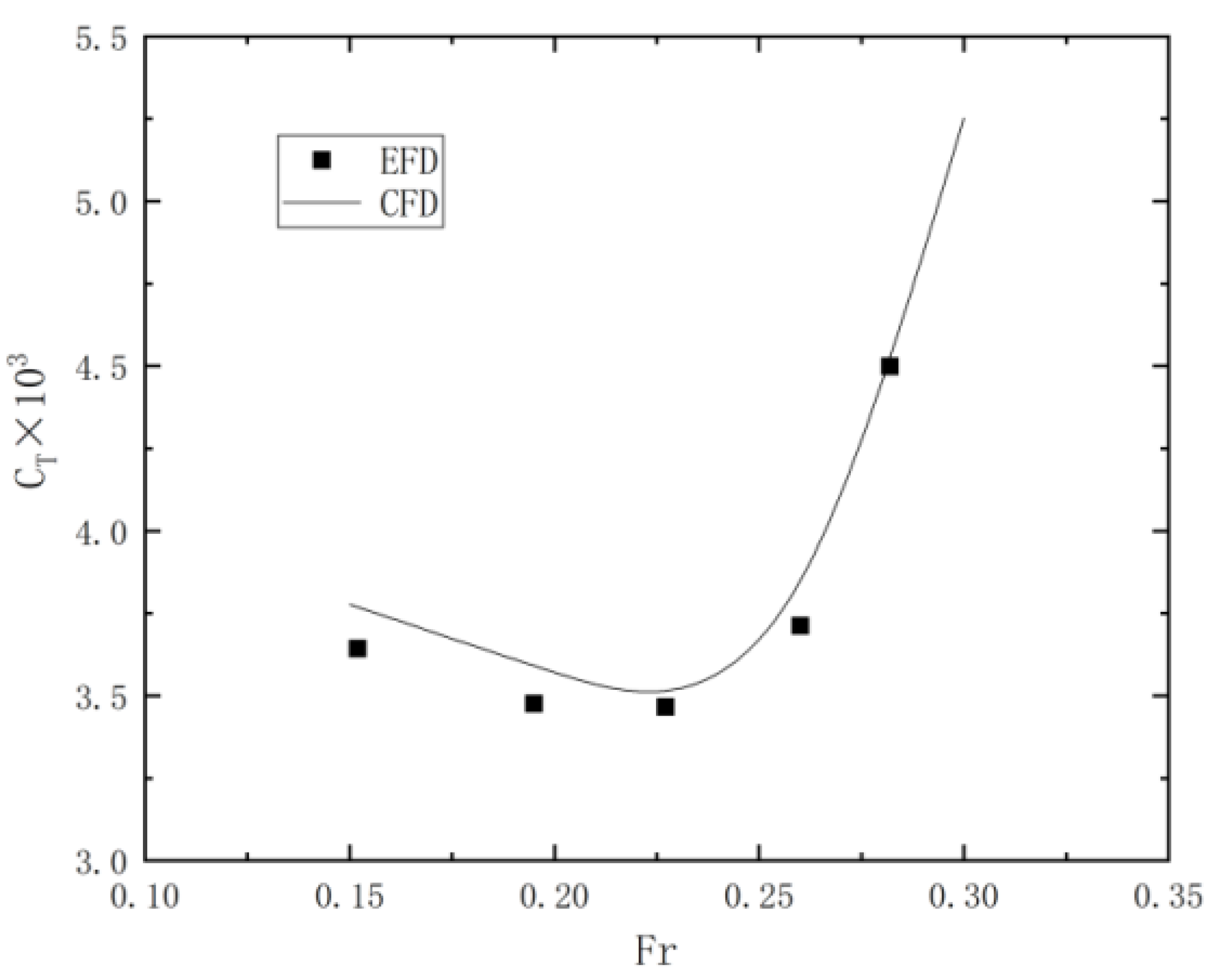
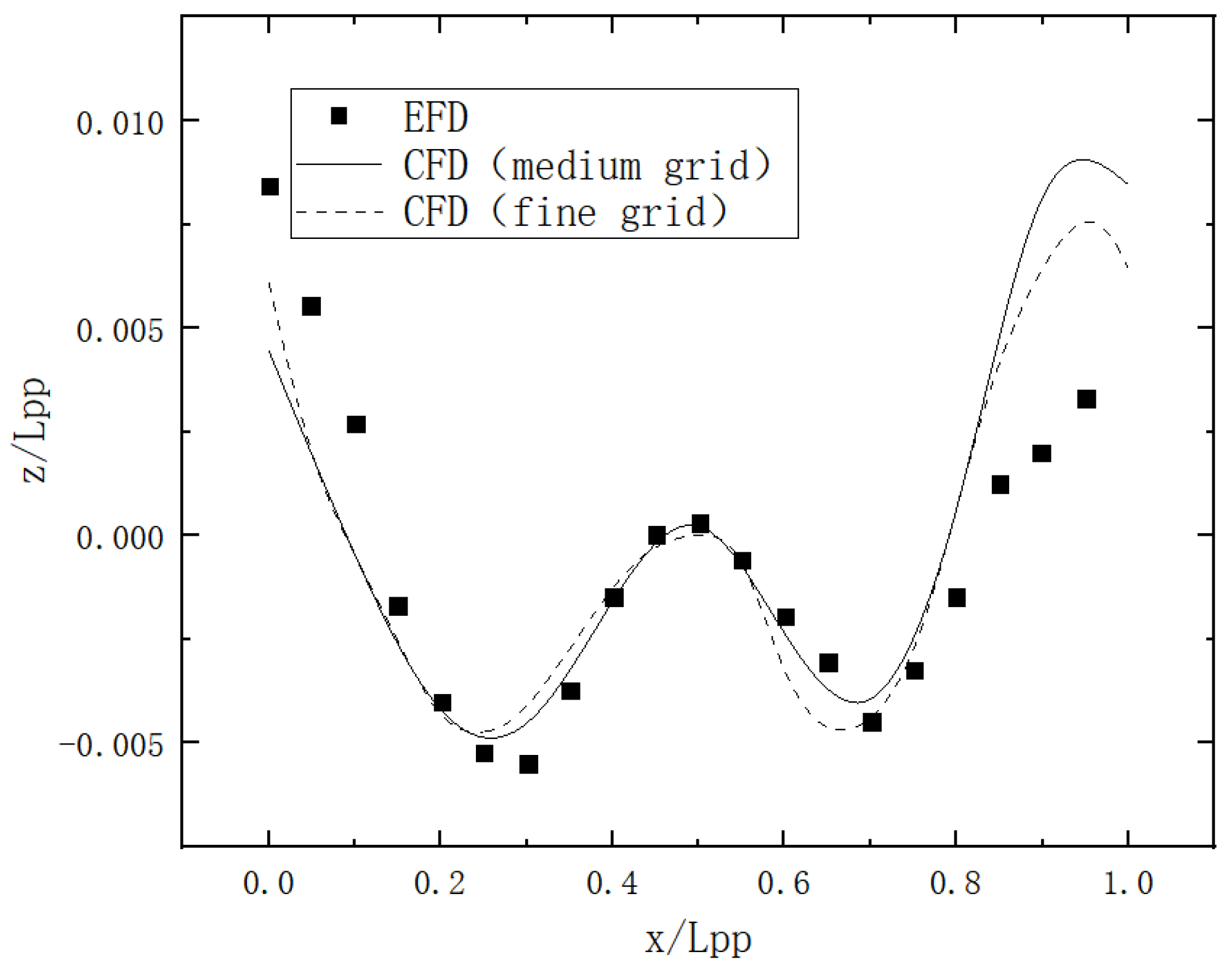
3.2. Verification and Validation
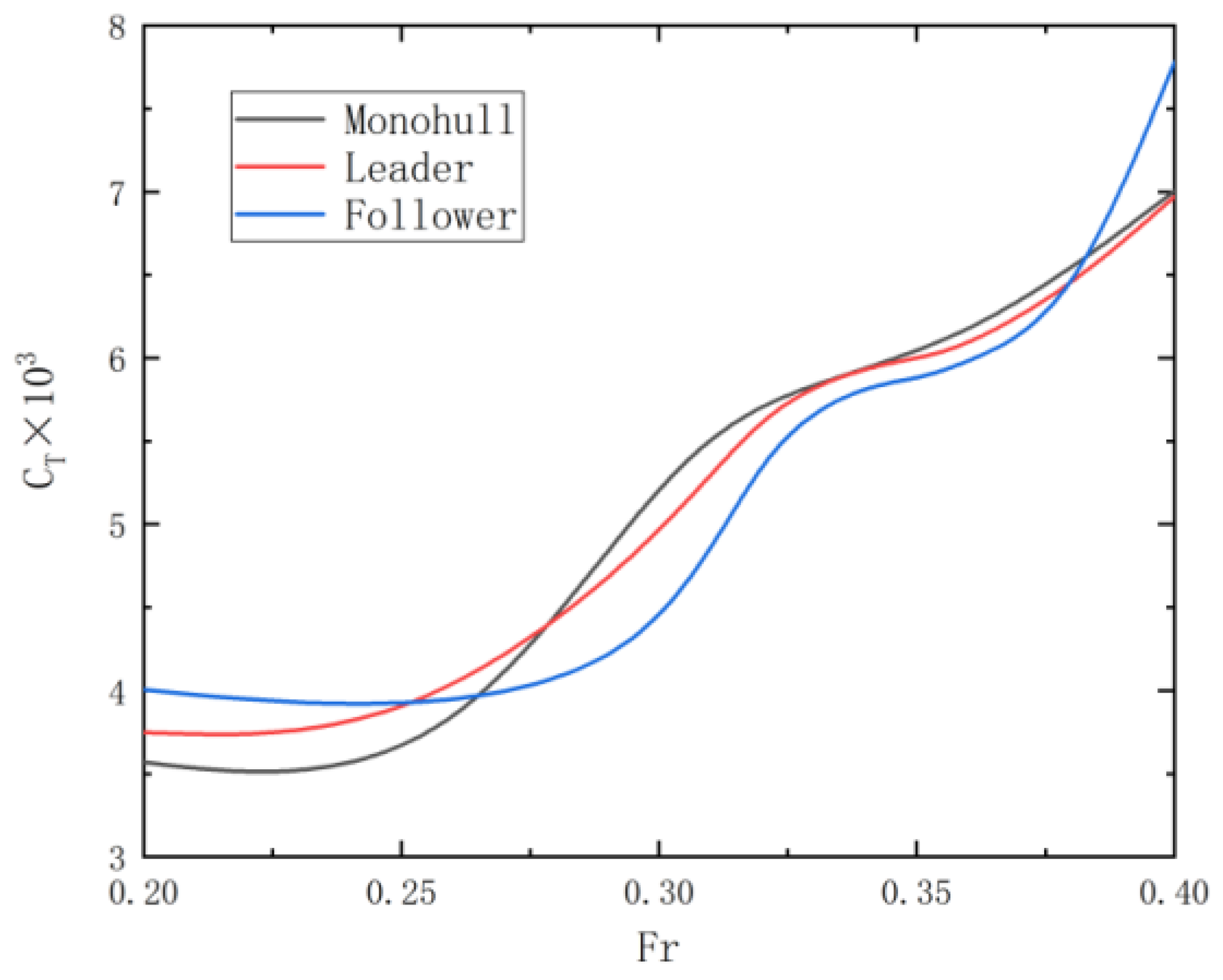
3.3. Hydrodynamic Interactions between Two Ships
4. Conclusions
- (1)
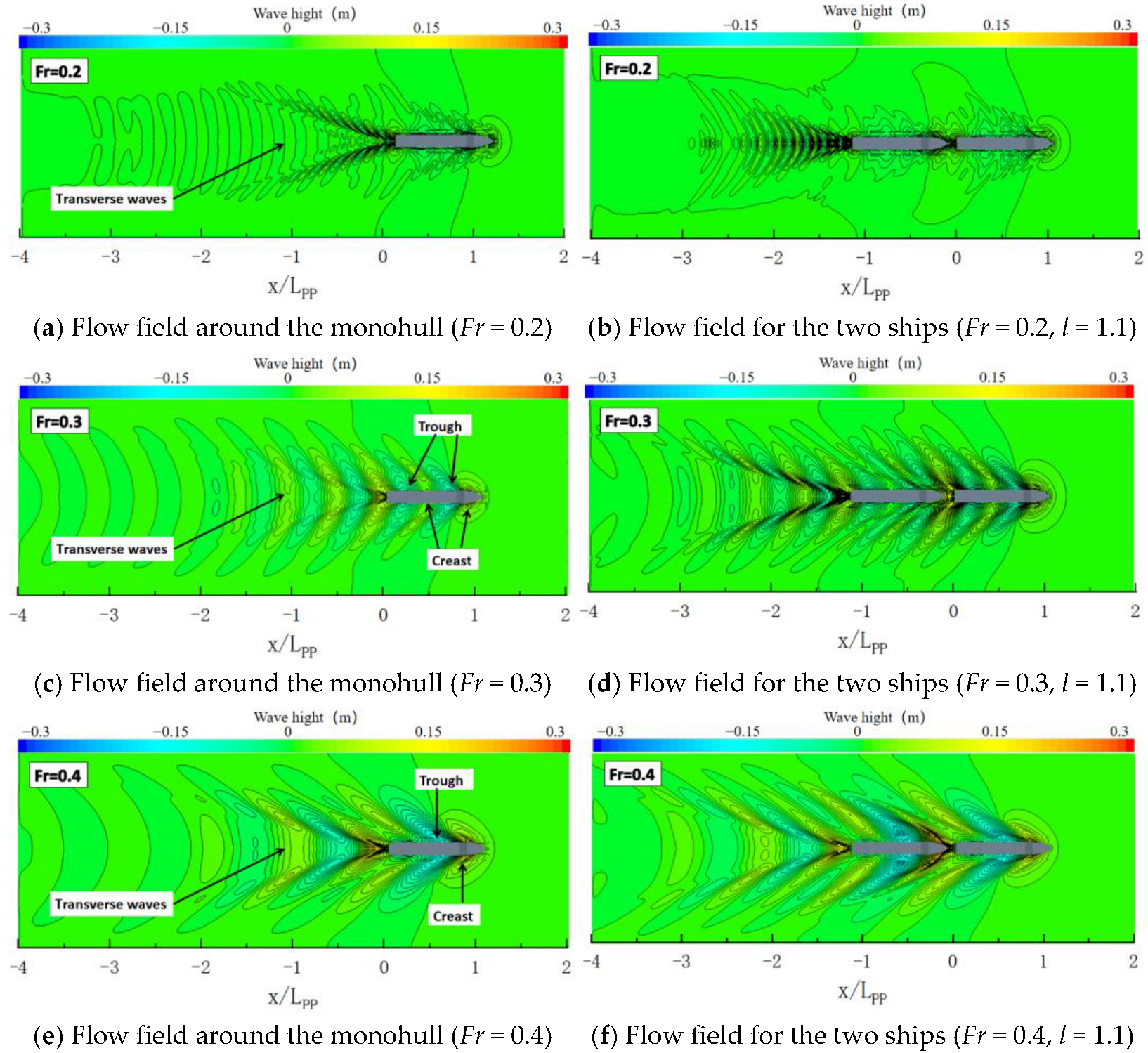
- When a single ship is sailing in still water, the characteristics of the flow field are as follows: the wavelength and amplitude of the transverse wave increase with higher speed, and the flow field is more intense, but the ratio of the divergent wave in the flow field increases, and the ratio of the transverse wave decreases. When the speed increases, the amplitude and wavelength of the wave around the ship also increase accordingly.
- (2)
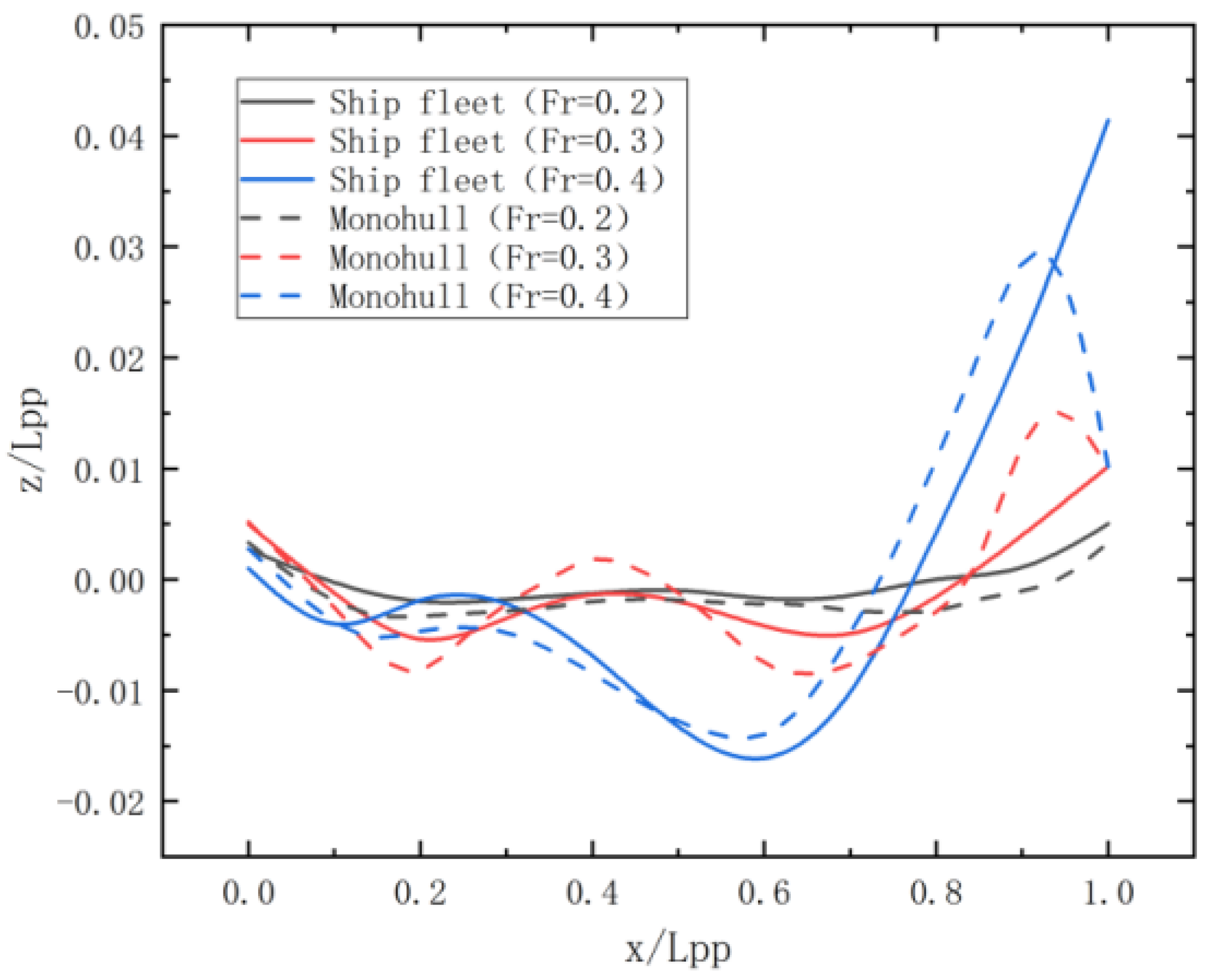
- When the two ships follow each other, the flow field is characterized as follows: the amplitude of the transverse waveform of the following ship increases significantly at low speed compared with that of the monohull case. The wave around the ship is disturbed by the flow field of the leading ship and shows a different waveform from the monohull case. In the midship region of the following ship, the maximum reduction in wave amplitude can be as much as 40.2%.
- (3)
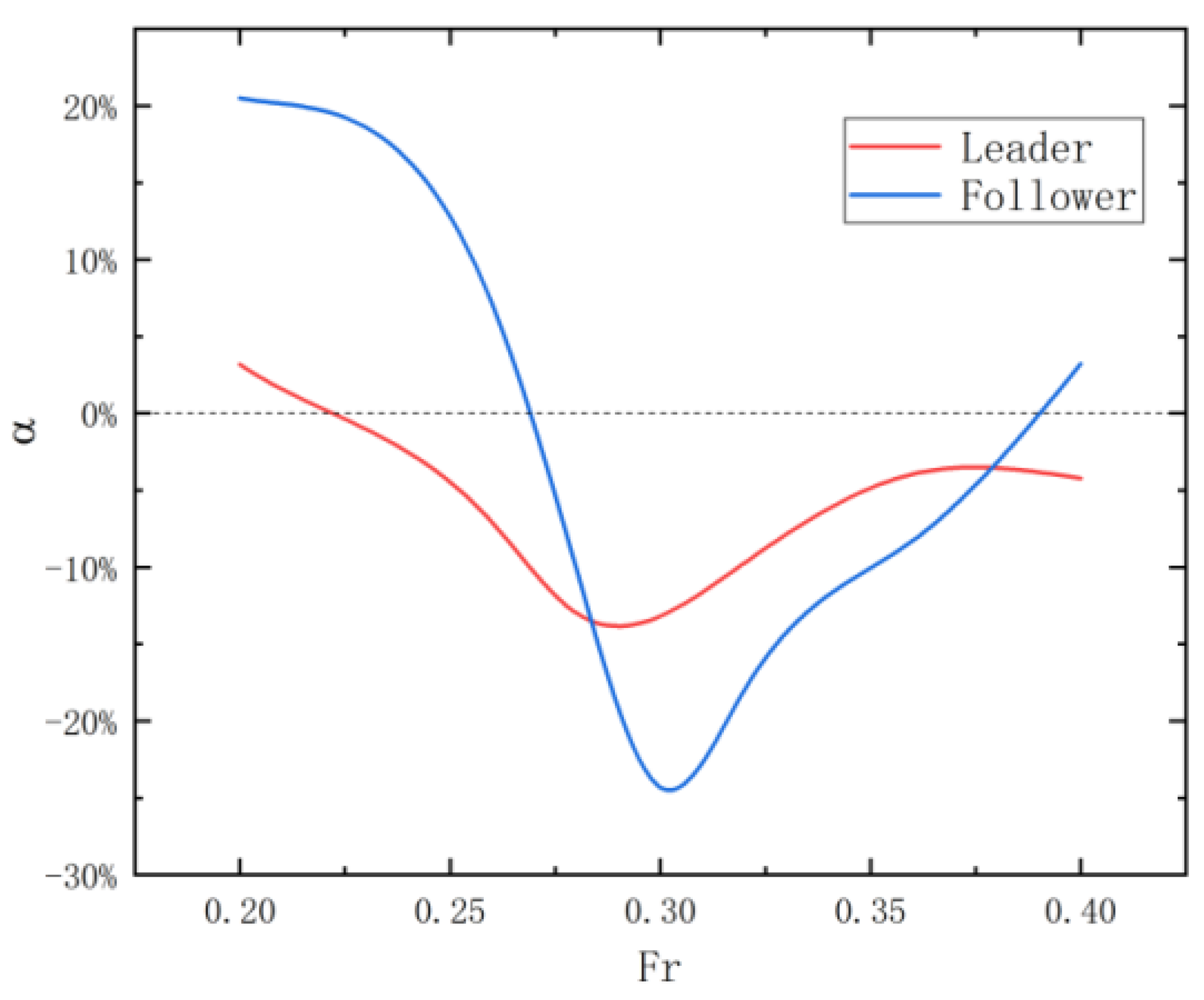
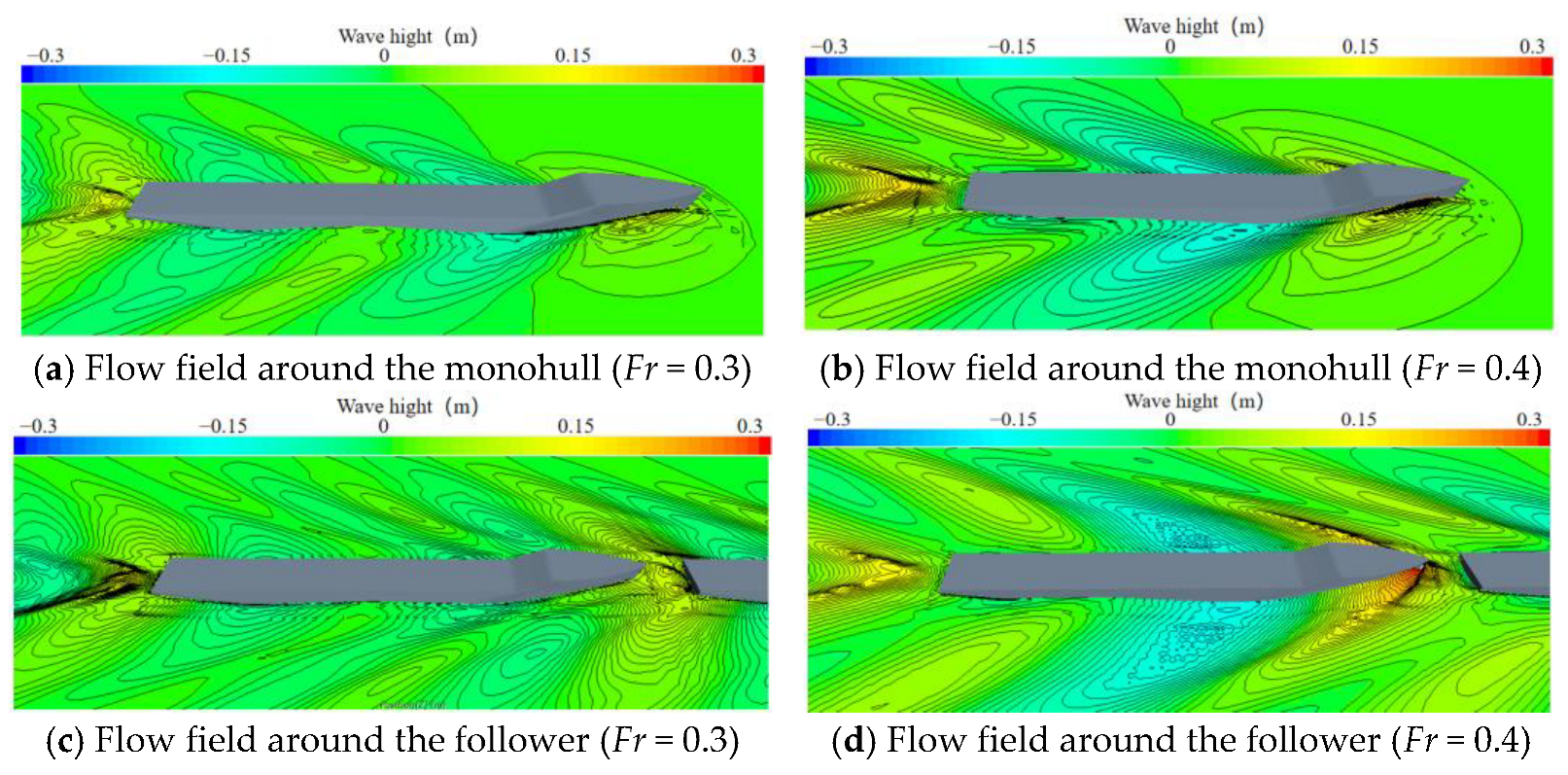
- When the two ships follow at different speeds, their interactions are also different. In a certain speed interval, the resistance of the following ship is reduced due to the influence of the leading ship compared with the resistance of the monohull, where the maximum reduction can be up to 24.3%. By observing the flow field around the ship, the reason for this phenomenon may be that the transverse wave at the stern of the leading ship and the wave around the following ship are superimposed and interfere with each other. When the speed changes, the flow field behind the leading ship produces transverse waves with a specific wavelength range, which produces the effect of suppressing the amplitude of the wave around the follower, thus reducing the wave resistance of the following ship, and conversely the wave resistance will increase.
- (4)
- When the interval between the two ships increases, the impact between the two ships decreases, in which the impact on the leading ship decreases significantly and the impact on the following ship is also reduced to a certain extent.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mizine, I.; Karafiath, G. Model Test Evaluation of High Speed Trimaran (HST) Sea Train Concept; SNAME: Alexandria, VA, USA, 2015. [Google Scholar]
- Noblesse, F.; He, J.; Zhu, Y.; Hong, L.; Zhang, C.; Zhu, R.; Yang, C. Why can ship wakes appear narrower than Kelvin’s angle? Eur. J. Mech. B-Fluids 2014, 46, 164–171. [Google Scholar] [CrossRef]
- Zhang, C.; He, J.; Zhu, Y.; Yang, C.-J.; Li, W.; Zhu, Y.; Lin, M.; Noblesse, F. Interference effects on the Kelvin wake of a monohull ship represented via a continuous distribution of sources. Eur. J. Mech. B-Fluids 2015, 51, 27–36. [Google Scholar] [CrossRef]
- Darmon, A.; Benzaquen, M.; Raphael, E. Kelvin wake pattern at large Froude numbers. J. Fluid Mech. 2014, 738, R3. [Google Scholar] [CrossRef]
- Pethiyagoda, R.; Moroney, T.J.; Lustri, C.J.; McCue, S.W. Kelvin wake pattern at small Froude numbers. J. Fluid Mech. 2021, 915, A126. [Google Scholar] [CrossRef]
- Sun, X.; Cai, M.; Wang, J.; Liu, C. Numerical Simulation of the Kelvin Wake Patterns. Appl. Sci. 2022, 12, 6265. [Google Scholar] [CrossRef]
- Zhou, J.; Ren, J.; Bai, W. Survey on hydrodynamic analysis of ship–ship interaction during the past decade. Ocean Eng. 2023, 278, 114361. [Google Scholar] [CrossRef]
- Xueqian, Z.; Sutulo, S.; Guedes Soares, C. Computation of ship hydrodynamic interaction forces in restricted waters using potential theory. J. Mar. Sci. Appl. 2012, 11, 265–275. [Google Scholar] [CrossRef]
- Du, P.; Ouahsine, A.; Sergent, P. Influences of the separation distance, ship speed and channel dimension on ship maneuverability in a confined waterway. Comptes Rendus Méc. 2018, 346, 390–401. [Google Scholar] [CrossRef]
- Luo-Theilen, X.; Rung, T. Computation of mechanically coupled bodies in a seaway. Ship Technol. Res. 2017, 64, 129–143. [Google Scholar] [CrossRef]
- Wang, J.F. Numerical Simulation of Hydrodynamic Interactions between Two Ships in Underway Replenishment at Sea. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2005. [Google Scholar]
- Harada, T.; Nakashima, A.; Arai, M.; Nishimoto, K. Motions and safety of a floating liquefied natural gas and shuttle tanker during side-by-side offloading operations. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2018, 233, 610–621. [Google Scholar] [CrossRef]
- Li, A.; Zhang, G.; Liu, X.; Yu, Y.; Zhang, X.; Ma, H.; Zhang, J. Hydrodynamic Characteristics at Intersection Areas of Ship and Bridge Pier with Skew Bridge. Water 2022, 14, 904. [Google Scholar] [CrossRef]
- Vasudevan, N.; Seeninaidu, N. CFD simulation of the passing vessel effects on moored vessel. Ships Offshore Struct. 2019, 15, 184–199. [Google Scholar] [CrossRef]
- Wnęk, A.D.; Sutulo, S.; Guedes Soares, C. CFD Analysis of Ship-to-Ship Hydrodynamic Interaction. J. Mar. Sci. Appl. 2018, 17, 21–37. [Google Scholar] [CrossRef]
- Ekerhovd, I.; Ong, M.; Taylor, P.; Zhao, W. Numerical study on gap resonance coupled to vessel motions relevant to side-by-side offloading. Ocean Eng. 2021, 241, 110045. [Google Scholar] [CrossRef]
- Li, B. Multi-body hydrodynamic resonance and shielding effect of vessels parallel and nonparallel side-by-side. Ocean Eng. 2020, 218, 108188. [Google Scholar] [CrossRef]
- Yuan, Z.-M.; Li, L.; Yeung, R. Free-Surface Effects on Interaction of Multiple Ships Moving at Different Speeds. J. Ship Res. 2019, 63, 251–267. [Google Scholar] [CrossRef]
- Li, M.-X.; Yuan, Z.-M.; Tao, L. An iterative time-marching scheme for the investigation of hydrodynamic interaction between multi-ships during overtaking. J. Hydrodyn. 2021, 33, 468–478. [Google Scholar] [CrossRef]
- Yuan, Z.-M.; Chen, M.; Jia, L.; Ji, C.; Incecik, A. Wave-riding and wave-passing by ducklings in formation swimming. J. Fluid Mech. 2021, 928, R2. [Google Scholar] [CrossRef]
- Ma, C.; Zhao, X.; Cheng, X.; Yang, Y.; Fan, L. The wave interference and the wave resistance of a leader-follower ship fleet. Ocean Eng. 2023, 274, 114089. [Google Scholar] [CrossRef]
- Ferziger, J.; Perić, M.; Street, R. Computational Methods for Fluid Dynamics; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Wilcox, D. Turbulence Modeling for CFD, 3rd ed.; Hardcover; DCW Industries: La Cañada, CA, USA, 2006. [Google Scholar]
- Quérard, A.; Temarel, P.; Turnock, S. Influence of Viscous Effects on the Hydrodynamics of Ship-Like Sections Undergoing Symmetric and Anti-Symmetric Motions, Using RANS. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Estoril, Portugal, 15–20 June 2008; Volume 5. [Google Scholar]
- Gorman, J.; Bhattacharyya, S.; Cheng, L.; Abraham, J. Turbulence Models Commonly Used in CFD; Intech Open: London, UK, 2021. [Google Scholar]
- Shih, T.H.; Liou, W.; Shabbir, A.; Yang, Z.; Zhu, J. A New k-(Eddy Viscosity Model for High Reynolds Number Turbulent Flows-Model Development and Validation. Comput. Fluids 1994, 24, 227–238. [Google Scholar] [CrossRef]
- Hirt, C.W.; Nichols, B.D. Volume of fluid (VOF) method for the dynamics of free boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- International Towing Tank Conference (ITTC). Practical guidelines for ship CFD applications. In Proceedings of the 26th ITTC, Rio de Janeiro, Brazil, 28 August–1 September 2011. [Google Scholar]
- Tezdogan, T.; Demirel, Y.K.; Kellett, P.; Khorasanchi, M.; Incecik, A.; Turan, O. Full-scale unsteady RANS CFD simulations of ship behaviour and performance in head seas due to slow steaming. Ocean Eng. 2015, 97, 186–206. [Google Scholar] [CrossRef]
- CD-Adapco. User Guide STAR-CCM+, Version 9.0.2; Siemens: Berlin, Germany, 2014.
- Khan, N.; Ibrahim, Z.; Ashfaq Ali, M.; Jameel, M.; Khan, M.; Javanmardi, A.; Oyejobi, D. Numerical simulation of flow with large eddy simulation at Re = 3900: A study on the accuracy of statistical quantities. Int. J. Numer. Methods Heat Fluid Flow 2019, 30, 2397–2409. [Google Scholar] [CrossRef]
- ITTC. Uncertainty Analysis in CFD Verification and Validation Methodology and Procedures. In Proceedings of the Resistance Committee of 25th ITTC, Fukuoka, Japan, 14–20 September 2008. [Google Scholar]
- Celik, I.; Ghia, U.; Roache, P.J.; Freitas, C.; Coloman, H.; Raad, P. Procedure of Estimation and Reporting of Uncertainty Due to Discretization in CFD Applications. J. Fluids Eng. 2008, 130, 078001. [Google Scholar] [CrossRef]
- Liu, M.-M.; Wang, H.-C.; Shao, F.-F.; Jin, X.; Tang, G.-Q.; Yang, F. Numerical investigation on vortex-induced vibration of an elastically mounted circular cylinder with multiple control rods at low Reynolds number. Appl. Ocean Res. 2022, 118, 102987. [Google Scholar] [CrossRef]
- Larsson, L.; Stern, F.; Visonneau, M. Numerical Ship Hydrodynamics—An Assessment of the Gothenburg 2010 Workshop; Springer Science+Business Media: Berlin, Germany, 2014. [Google Scholar]
- Kim, W.J.; Van, S.H.; Kim, D.H. Measurement of flows around modern commercial ship models. Exp. Fluids 2001, 31, 567–578. [Google Scholar] [CrossRef]
- Du, P.; Ouahsine, A.; Sergent, P. Hydrodynamics prediction of a ship in static and dynamic states. Coupled Syst. Mech. 2018, 7, 163–176. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Particulars | Symbols and Units | Values |
|---|---|---|
| Length between the perpendiculars | Lpp (m) | 7.2786 |
| Beam of waterline | Bwl (m) | 1.019 |
| Draft | D (m) | 0.6013 |
| Displacement | Δ (m3) | 1.649 |
| Scaling factor | λ | 31.6 |
| Form | Value |
|---|---|
| r21 | 1.26 |
| r23 | 1.28 |
| φ1 | 0.003751 |
| φ2 | 0.003784 |
| φ3 | 0.004064 |
| ε32 | 0.00028 |
| ε21 | 0.000033 |
| s | 1 |
| q | −0.1650 |
| p | 9.0759 |
| 0.008798 | |
| 0.001502 |
| Number of Grids | CT | Errors |
|---|---|---|
| 4,453,641 | 0.003751 | 1.074% |
| 2,210,936 | 0.003784 | 1.952% |
| 1,045,682 | 0.004064 | 9.497% |
| Fr | l | Amplitude at Midship | Resistance Coefficient |
|---|---|---|---|
| 0.3 | 1.1 | −34.4% | −24.3% |
| 0.4 | 1.1 | +21.9% | +3.2% |
| 0.3 | 1.5 | −25.5% | −13.75% |
| 0.4 | 1.5 | −40.2% | +11.0% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Dai, C.; Cui, X.; Wang, Y.; Liu, H.; Zhou, B. Hydrodynamic Interactions between Ships in a Fleet. J. Mar. Sci. Eng. 2024, 12, 56. https://doi.org/10.3390/jmse12010056
Liu Z, Dai C, Cui X, Wang Y, Liu H, Zhou B. Hydrodynamic Interactions between Ships in a Fleet. Journal of Marine Science and Engineering. 2024; 12(1):56. https://doi.org/10.3390/jmse12010056
Chicago/Turabian StyleLiu, Zhengyuan, Changming Dai, Xiaohui Cui, Yu Wang, Hui Liu, and Bo Zhou. 2024. "Hydrodynamic Interactions between Ships in a Fleet" Journal of Marine Science and Engineering 12, no. 1: 56. https://doi.org/10.3390/jmse12010056
APA StyleLiu, Z., Dai, C., Cui, X., Wang, Y., Liu, H., & Zhou, B. (2024). Hydrodynamic Interactions between Ships in a Fleet. Journal of Marine Science and Engineering, 12(1), 56. https://doi.org/10.3390/jmse12010056