
Offshore Experimental Work of a Pump Directly Driven by a Fully Passive Dual-Flapping-Foil Hydrokinetic Turbine


Abstract
:1. Introduction
2. Methods and Materials
2.1. Pump System Using Dual-Flapping-Foil Hydrokinetic Turbine
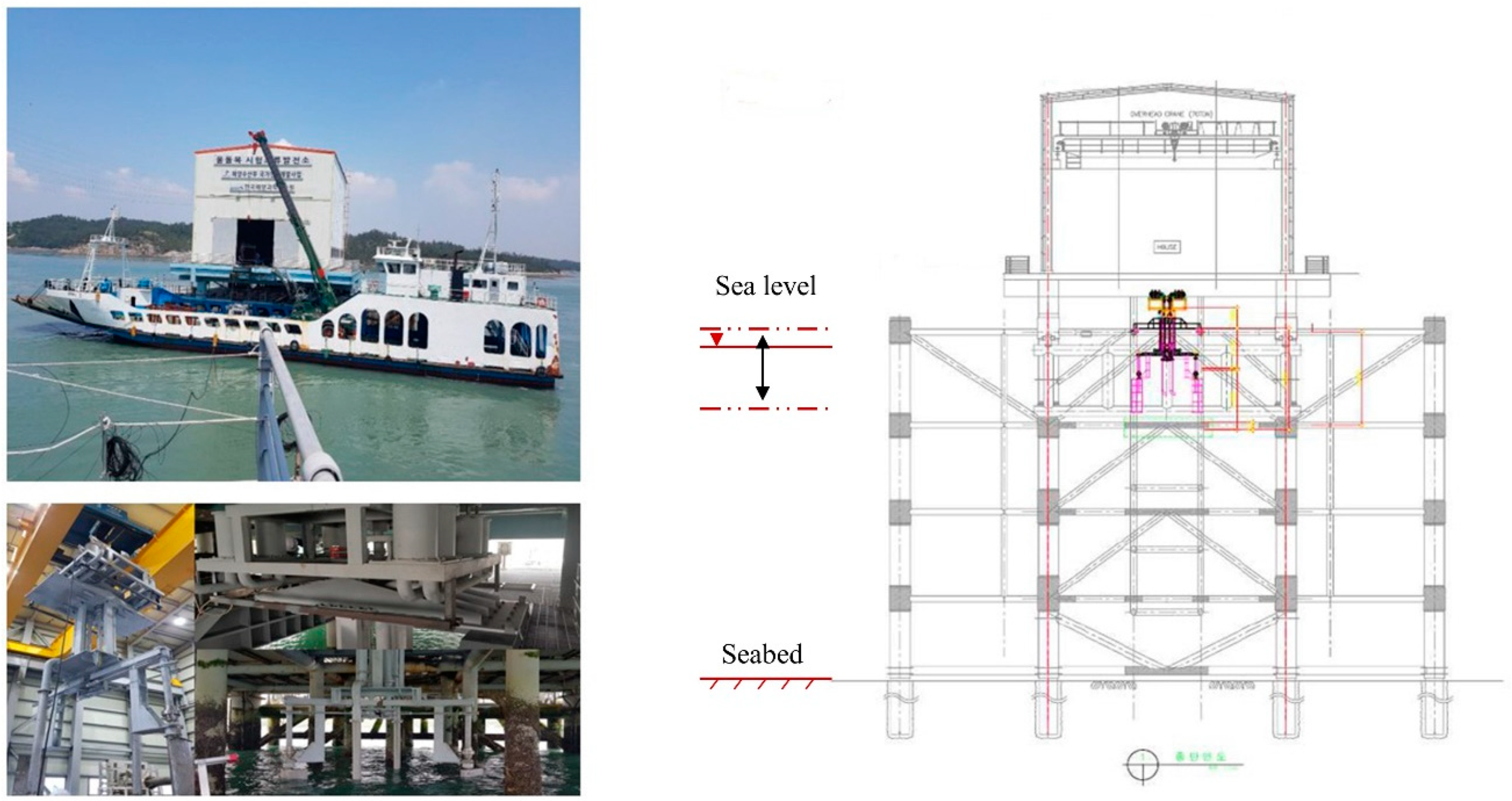
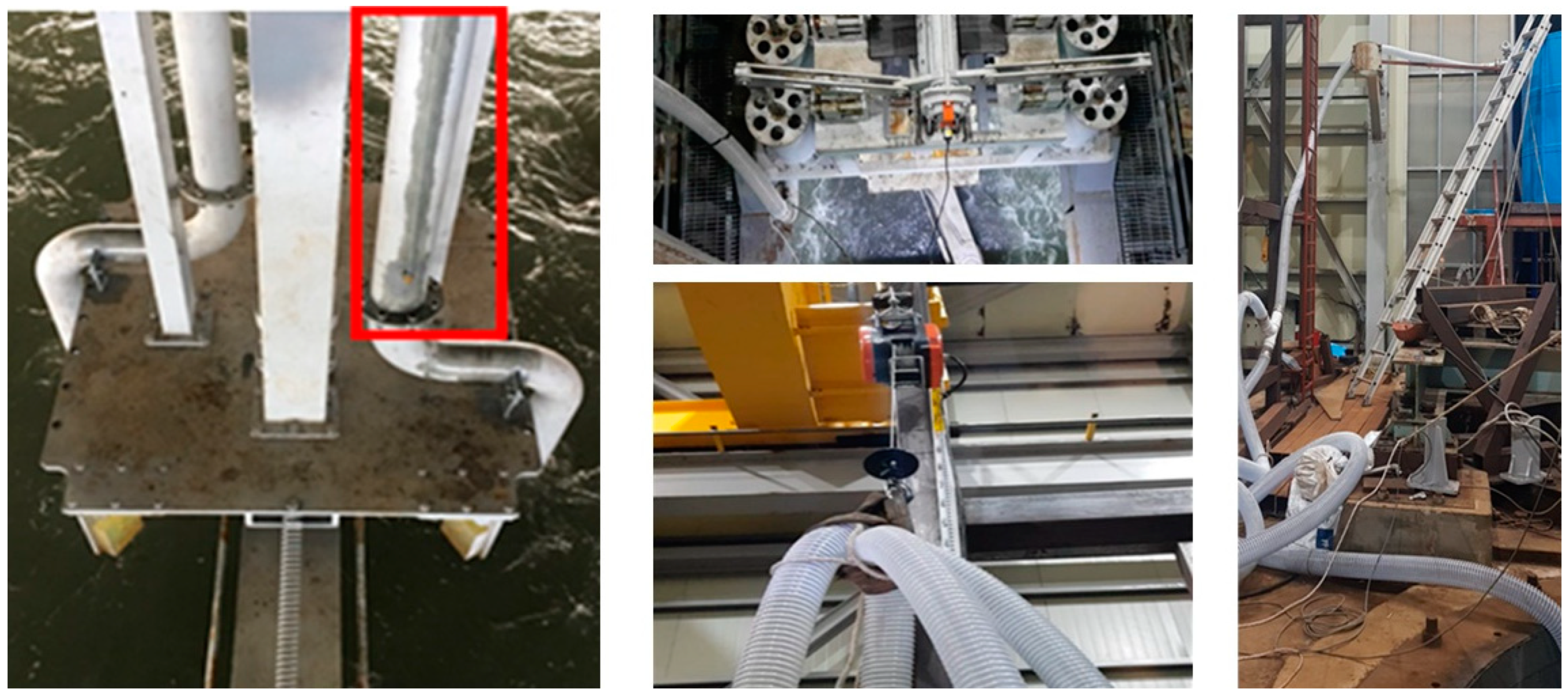
2.2. Offshore Experimental Set-Up
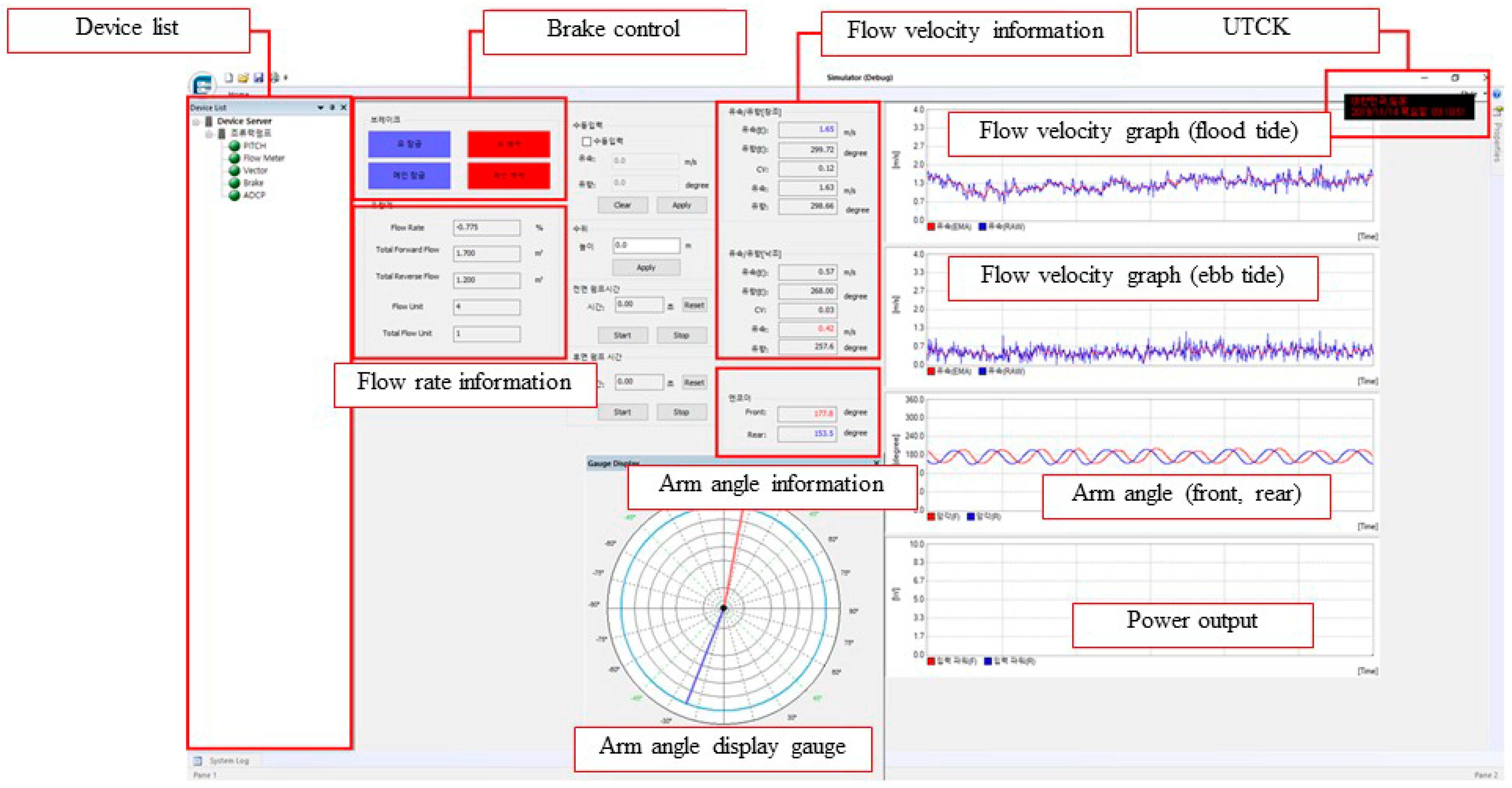
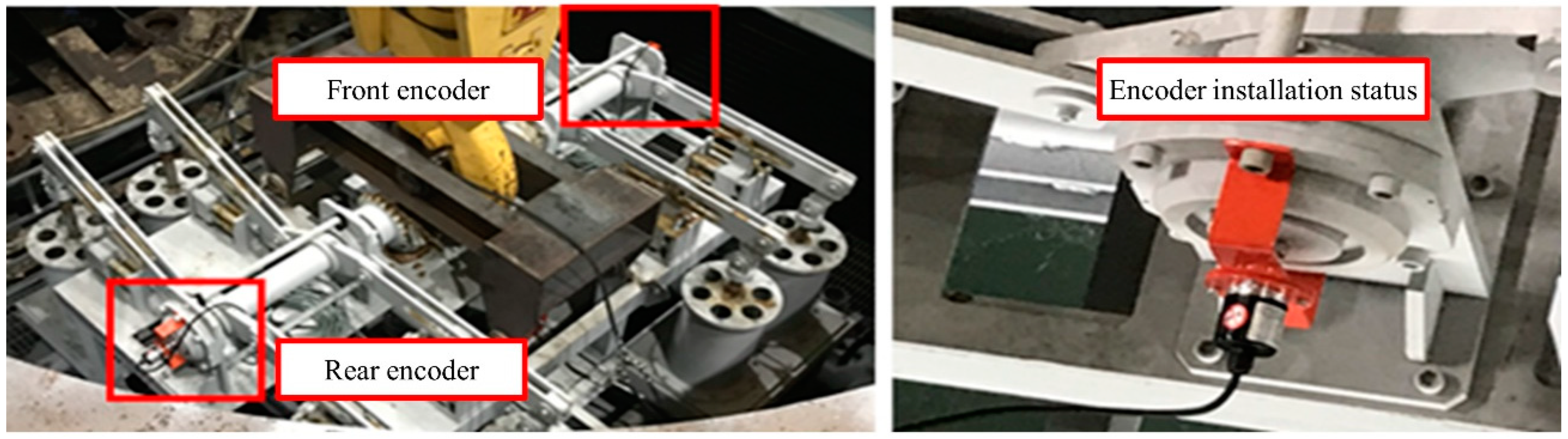
2.2.1. Measurement of Arm Angle
2.2.2. Pumping Pipe and Tank
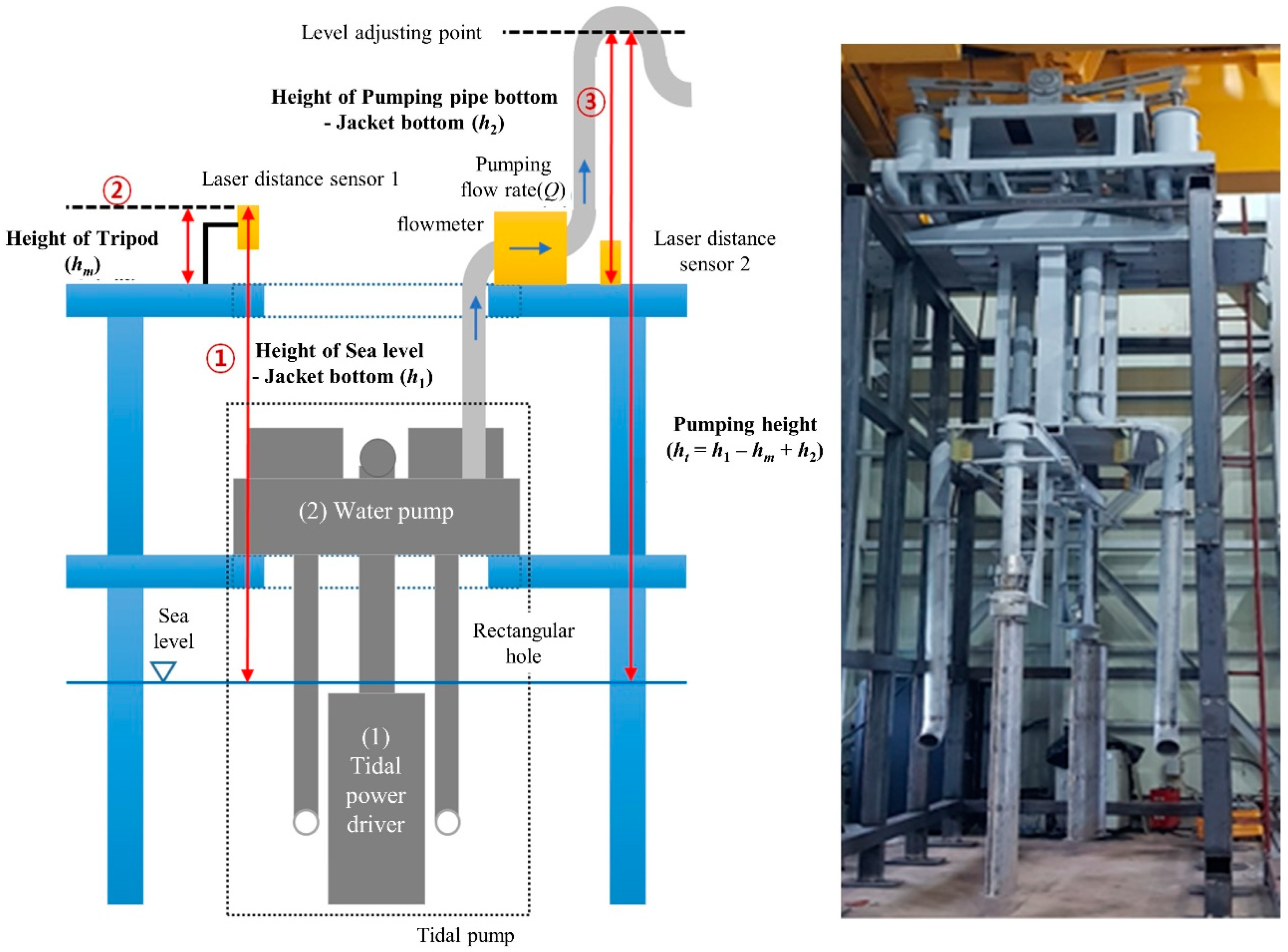
2.2.3. Flow Rate and Height Measurement
2.2.4. Pumping Power
3. Results & Discussion
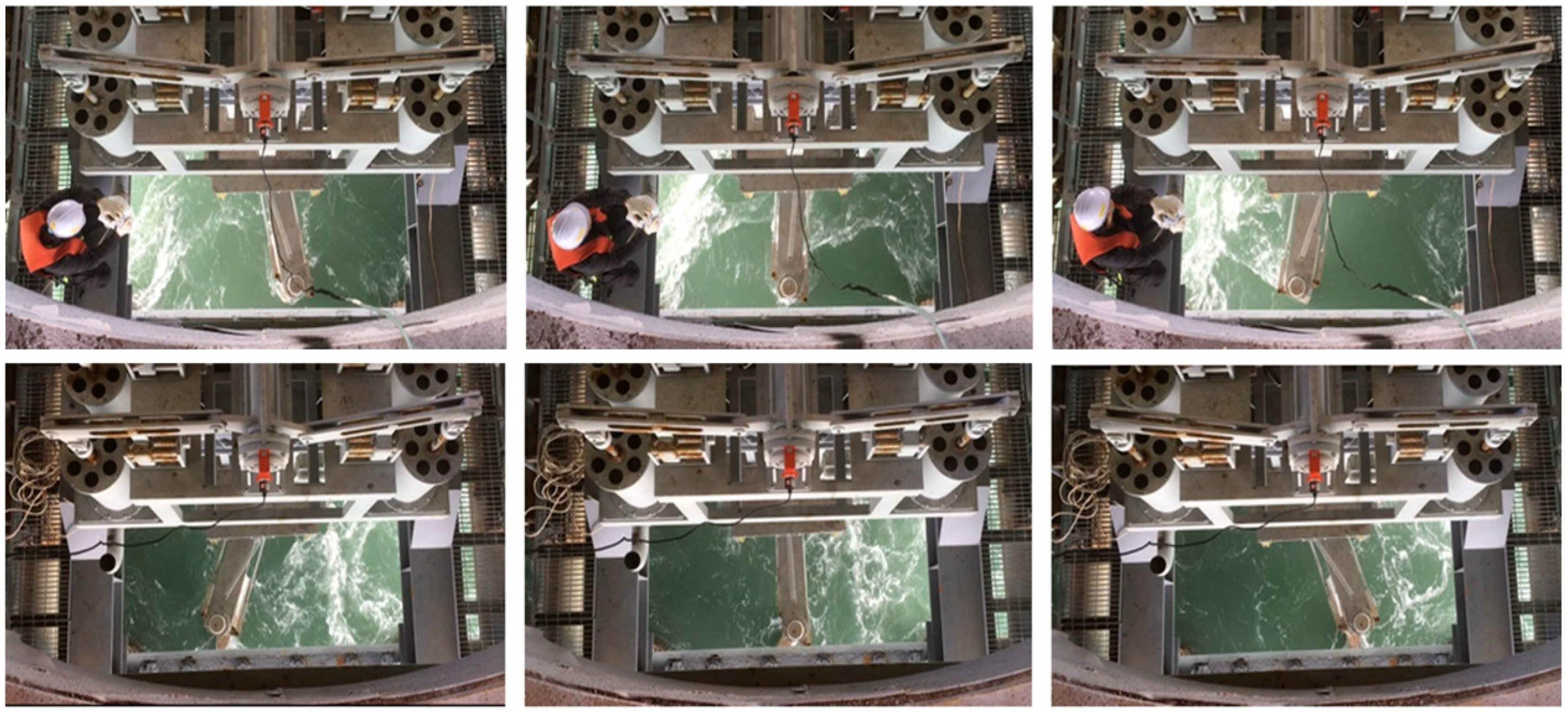
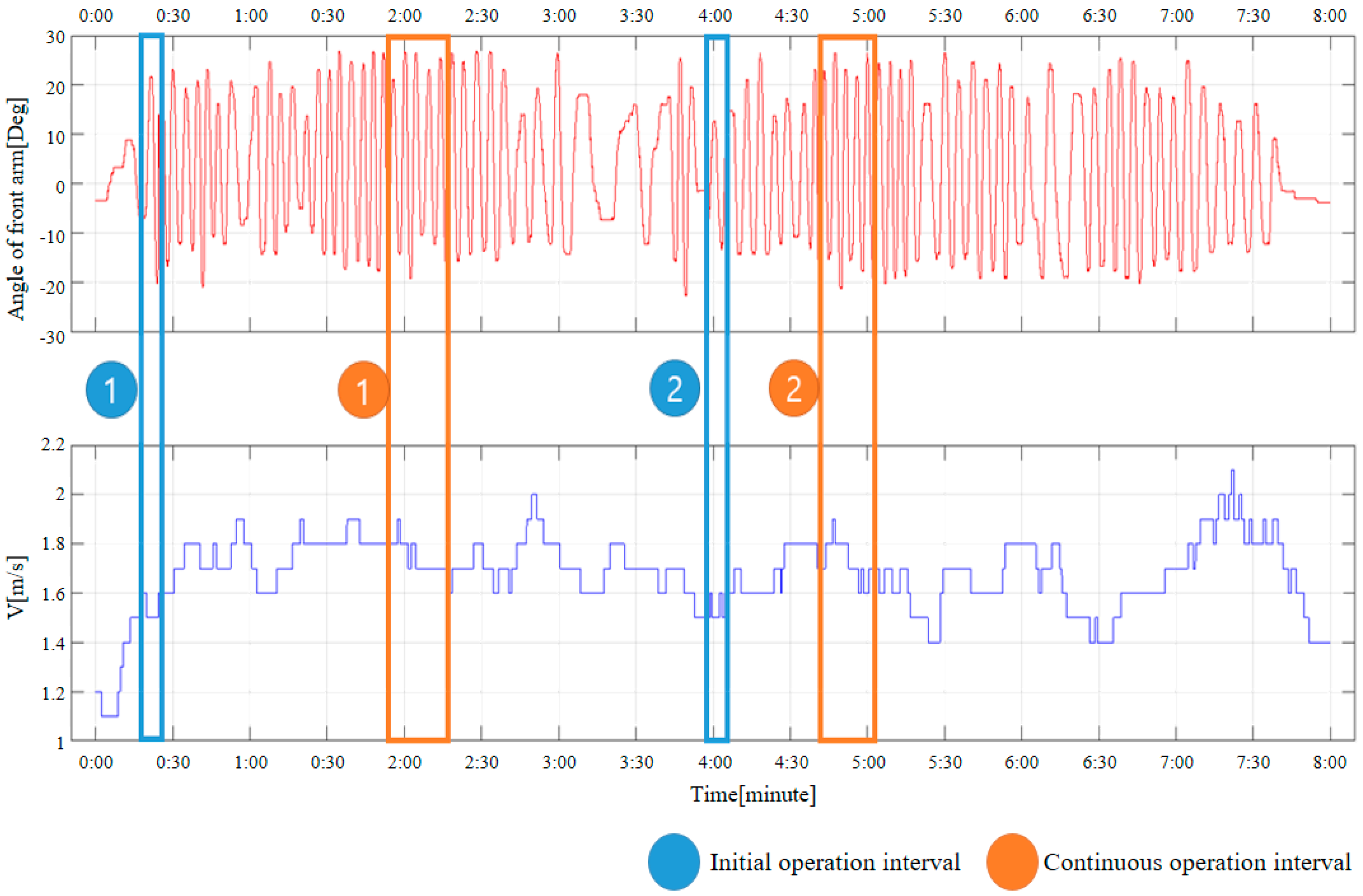
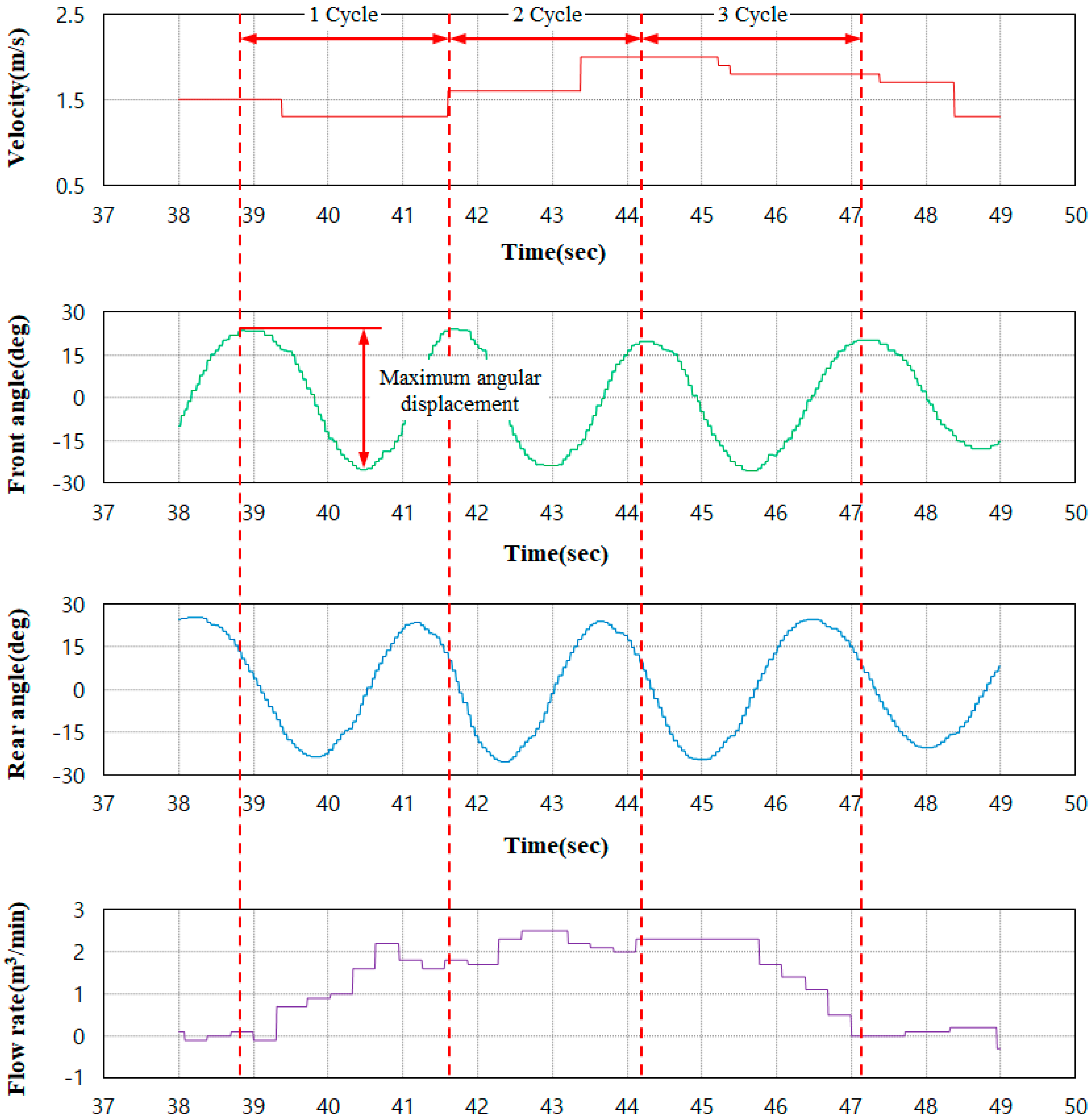
3.1. Fully Passive Activation of Arm Motion and Pumping
3.2. Pumping Power and Efficiency
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Carley, S. State renewable energy electricity policies: An empirical evaluation of effectiveness. Energy Policy 2009, 37, 3071–3081. [Google Scholar] [CrossRef]
- Dincer, I. Renewable energy and sustainable development: A crucial review. Renew. Sustain. Energy Rev. 2000, 4, 157–175. [Google Scholar] [CrossRef]
- Young, J.; Lai, J.C.; Platzer, M.F. A review of progress and challenges in flapping foil power generation. Prog. Aerosp. Sci. 2014, 67, 2–28. [Google Scholar] [CrossRef]
- McKinney, W.; DeLaurier, J. Windmill: An oscillating-wing windmill. J. Energy 1981, 5, 109–115. [Google Scholar] [CrossRef]
- Xiao, Q.; Zhu, Q. A review on flow energy harvesters based on flapping foils. J. Fluids Struct. 2014, 46, 174–191. [Google Scholar] [CrossRef]
- Boudreau, M.; Dumas, G.; Rahimpour, M.; Oshkai, P. Experimental investigation of the energy extraction by a fully-passive flapping-foil hydrokinetic turbine prototype. J. Fluids Struct. 2018, 82, 446–472. [Google Scholar] [CrossRef]
- Duarte, L.; Dellinger, N.; Dellinger, G.; Ghenaim, A.; Terfous, A. Experimental investigation of the dynamic behaviour of a fully passive flapping foil hydrokinetic turbine. J. Fluids Struct. 2019, 88, 1–12. [Google Scholar] [CrossRef]
- Kinsey, T.; Dumas, G.; Lalande, G.; Ruel, J.; Mehut, A.; Viarouge, P.; Lemay, J.; Jean, Y. Prototype testing of a hydrokinetic turbine based on oscillating hydrofoils. Renew. Energy 2011, 36, 1710–1718. [Google Scholar] [CrossRef]
- Xu, J.; Tan, S.; Guan, D.; Ali, R.; Zhang, L. Energy extraction performance of motion-constrained tandem oscillating hydrofoils. J. Renew. Sustain. Energy 2017, 9, 044501. [Google Scholar] [CrossRef]
- Xu, W.; Xu, G.; Duan, W.; Song, Z.; Lei, J. Experimental and numerical study of a hydrokinetic turbine based on tandem flapping hydrofoils. Energy 2019, 174, 375–385. [Google Scholar] [CrossRef]
- Kim, J.; Kim, D.-G.; Jung, S.; Moon, S.M.; Ko, J.H. Experimental study of a fully passive flapping hydrofoil turbine with a dual configuration and a coupling mechanism. Renew. Energy 2023, 208, 191–202. [Google Scholar] [CrossRef]
- Ma, P.; Wang, Y.; Xie, Y.; Han, J.; Sun, G.; Zhang, J. Effect of wake interaction on the response of two tandem oscillating hydrofoils. Energy Sci. Eng. 2019, 7, 431–442. [Google Scholar] [CrossRef]
- Zhao, F.; Jiang, Q.; Wang, Z.; Qadri, M.M.; Li, L.; Tang, H. Interaction of two fully passive flapping foils arranged in tandem and its influence on flow energy harvesting. Energy 2023, 268, 126714. [Google Scholar] [CrossRef]
- Lucas, A. Wind, Water, Work: Ancient and Medieval Milling Technology; Brill: Leiden, The Netherlands, 2006; Volume 8, p. 61. [Google Scholar]
- Argaw, N.; Foster, R.; Ellis, A. Renewable Energy for Water Pumping Applications in Rural Villages; Period of Performance: April 1, 2001–September 1, 2001; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2003. [Google Scholar]
- Intriago Zambrano, J.C.; Michavila, J.; Arenas Pinilla, E.; Diehl, J.C.; Ertsen, M.W. Water lifting water: A comprehensive spatiotemporal review on the hydro-powered water pumping technologies. Water 2019, 11, 1677. [Google Scholar] [CrossRef]
- Zhou, D.; Chen, H.; Zheng, Y.; Kan, K.; Yu, A.; Binama, M. Development and numerical performance analysis of a pump directly driven by a hydrokinetic turbine. Energies 2019, 12, 4264. [Google Scholar] [CrossRef]
- Yourbrook Energy Systems Ltd. Yourbrook Tidal Technology for Shallow Water. 2020. Available online: https://www.yourbrookenergy.com/ (accessed on 1 September 2024).
- Kirke, B. Hydrokinetic turbines for moderate sized rivers. Energy Sustain. Dev. 2020, 58, 182–195. [Google Scholar] [CrossRef] [PubMed]
- Sitorus, P.E.; Ko, J.H. Power extraction performance of three types of flapping hydrofoils at a Reynolds number of 1.7E6. Renew. Energy 2019, 132, 106–118. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Foil Shape | NACA0020 |
|---|---|
| Chord length (c) | 600 mm |
| Span length (s) | 2200 mm |
| Flapping arm length (L) | 1700 mm |
| Targeted flapping angle amplitude () | 30 degrees |
| Targeted pitching angle amplitude () | 60 degrees |
| Targeted phase difference | |
| Pitch and flapping () | 90 degrees |
| Front and rear foils () | 90 degrees |
| Inter-hydrofoil distance (Lx) | 3900 mm |
| Number | Relative Pumping Load (%) |
|---|---|
| 8 | 100 |
| 6 | 75 |
| 4 | 50 |
| 2 | 25 |
| Initial 1 | Initial 2 | Continuous 1 | Continuous 2 | |
|---|---|---|---|---|
| Average (m/s) | 1.5144 | 1.5288 | 1.7473 | 1.7528 |
| Variance | 0.0012 | 0.0021 | 0.0034 | 0.0049 |
| Standard deviation | 0.0352 | 0.0453 | 0.0500 | 0.0700 |
| Initial Operation Flow Velocity | Continuous Operation Flow Velocity | Pumping Flow Velocity | ||
|---|---|---|---|---|
| Relative pumping load (%) | 25 | 1.1 m/s | 1.2 m/s | 1.22 m/s |
| 50 | 1.3 m/s | 1.5 m/s | 1.6 m/s | |
| 75 | 1.3 m/s | 1.65 m/s | 1.7 m/s | |
| 100 | 1.5 m/s | 1.7 m/s | 1.8 m/s | |
| Water level from deck of jacket (h1–h2) | 7.0–7.5 m | 6.6–7.3 m | 5.3–5.9 m | |
| Cycle | Front Swept Area (m2) | Rear Swept Area (m2) | Period (Second) | Average Flow Vel. (m/s) |
|---|---|---|---|---|
| 1 | 2.91 | 2.81 | 2.80 | 1.38 |
| 2 | 2.64 | 2.90 | 2.55 | 1.87 |
| 3 | 2.74 | 2.90 | 2.89 | 1.80 |
| Cycle | Reduced Frequency | Pumping Power [W] | Efficiency [%] |
|---|---|---|---|
| 1 | 0.155 | 1748.1 | 44.6 |
| 2 | 0.126 | 3304.4 | 34.0 |
| 3 | 0.115 | 2730.5 | 31.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.; Jung, S.; Jung, M.; Choi, S.; Jeong, D.; Ko, J.H. Offshore Experimental Work of a Pump Directly Driven by a Fully Passive Dual-Flapping-Foil Hydrokinetic Turbine. J. Mar. Sci. Eng. 2024, 12, 1747. https://doi.org/10.3390/jmse12101747
Kim J, Jung S, Jung M, Choi S, Jeong D, Ko JH. Offshore Experimental Work of a Pump Directly Driven by a Fully Passive Dual-Flapping-Foil Hydrokinetic Turbine. Journal of Marine Science and Engineering. 2024; 12(10):1747. https://doi.org/10.3390/jmse12101747
Chicago/Turabian StyleKim, Jihoon, Sejin Jung, Muhea Jung, Sangkyu Choi, Dasom Jeong, and Jin Hwan Ko. 2024. "Offshore Experimental Work of a Pump Directly Driven by a Fully Passive Dual-Flapping-Foil Hydrokinetic Turbine" Journal of Marine Science and Engineering 12, no. 10: 1747. https://doi.org/10.3390/jmse12101747