Design and Implementation of a Shipborne Echo Sounder Simulator Based on a Seabed Echo Scattering and Noise Model

Abstract
:1. Introduction
2. Materials and Method
2.1. Seabed Echo Scattering Model
2.1.1. Rough Interface Scattering Cross-Section
- (1)
- Large Roughness Scattering Cross-Section
- (2)
- Kirchhoff Approximation
- (3)
- Here, is the reference value, taken as 1 cm.
- (4)
- Interpolation Processing
2.1.2. Volume Scattering Cross-Section of Sediments
2.2. Image Noise Model
2.2.1. Environmental Noise
- (1)
- Initialization: Set the initial coordinate of the noise pixel point to (w, 0) and generate a random number r in the interval [0, 1).
- (2)
- Weight Accumulation: Accumulate the weight values and calculate the proportion of the current weight G1 to the total weight G0.
- (3)
- Position Determination: If the random number r is less than G1/G0, determine the vertical coordinate g and exit the loop. Then, draw the noise pixel at the coordinate (w, g). Otherwise, return to step 2 and continue accumulating weights and calculating proportions.
- (4)
- Move the Image: Repeat the above steps several times and then move the image to the left.
- (5)
- Control Image Width: Repeat the above steps as needed to control the width of the noise image.
2.2.2. Ocean Reverberation Noise
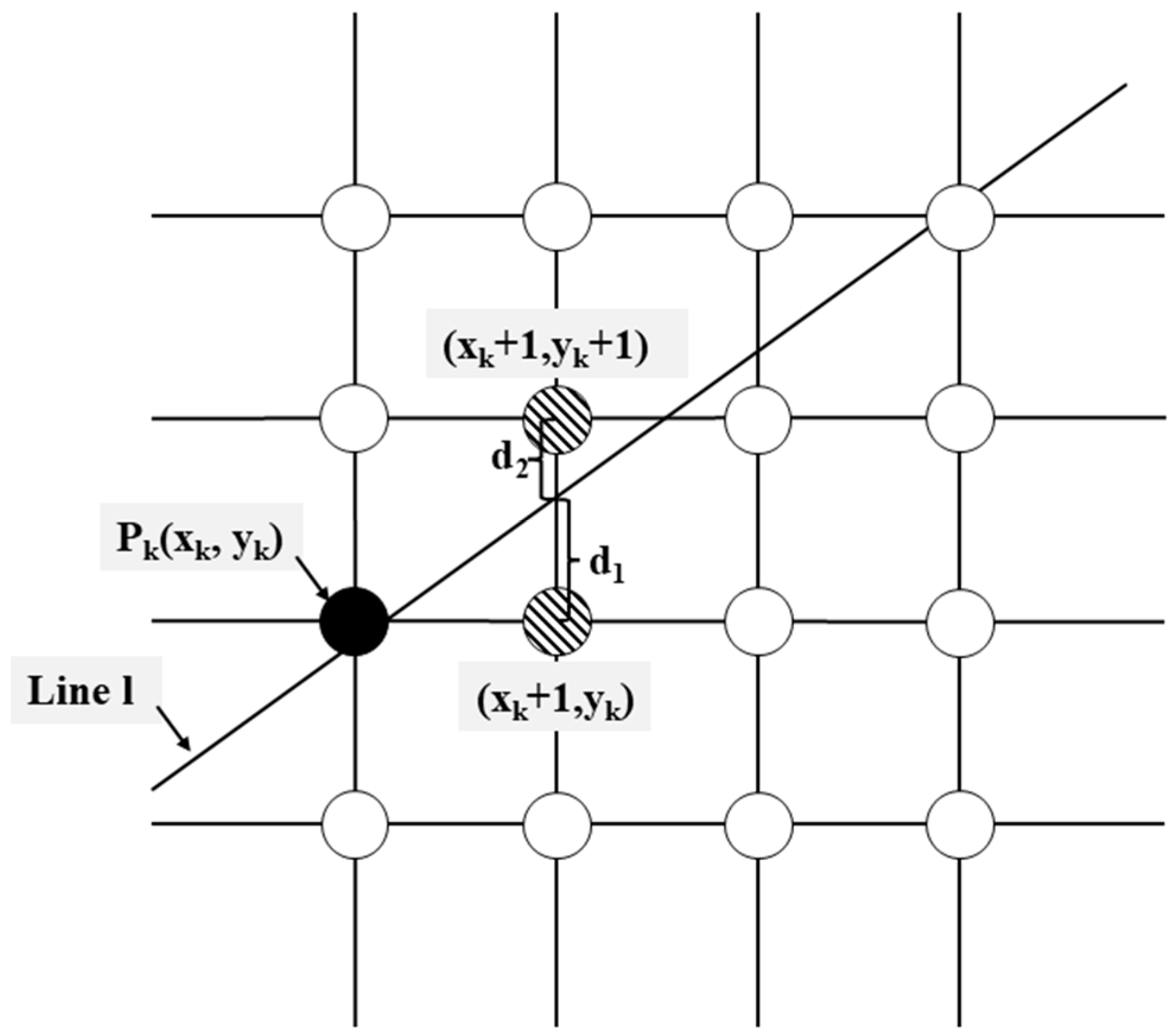
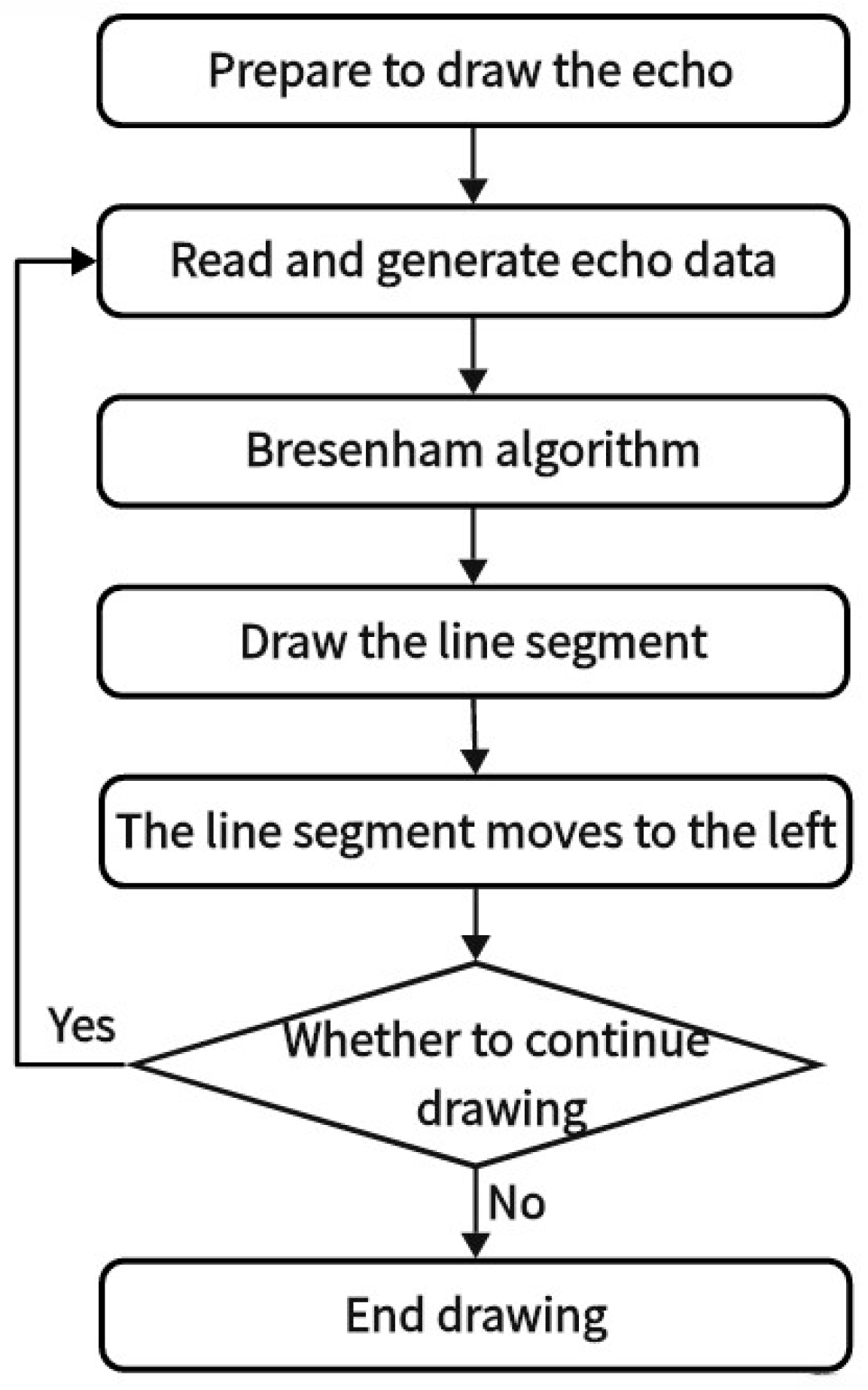
2.3. Seabed Echo Generation Algorithm
- (1)
- If (i.e., ), then .
- (2)
- If (i.e., ), then .
- (1)
- If , then .
- (2)
- If , then .
- (1)
- Input the two endpoints of the line substrate, storing the left endpoint in (xs, ys).
- (2)
- Store (xs, ys) in the frame buffer memory and draw the first point.
- (3)
- Calculate the initial decision parameter: .
- (4)
- Starting from , for each xk along the line substrate, perform the following tests:
- a.
- If , the next point to draw is (xk + 1, yk), and .
- b.
- If , the next point to draw is (xk + 1, yk + 1), and .
- (5)
- Repeat step 4) for Δx − 1 times.
3. Result and Discussion
3.1. Seabed Echo Simulation
3.2. Simulation of Different Sediment Echo Intensity
3.3. Simulation of Gain, Noise and Clutter
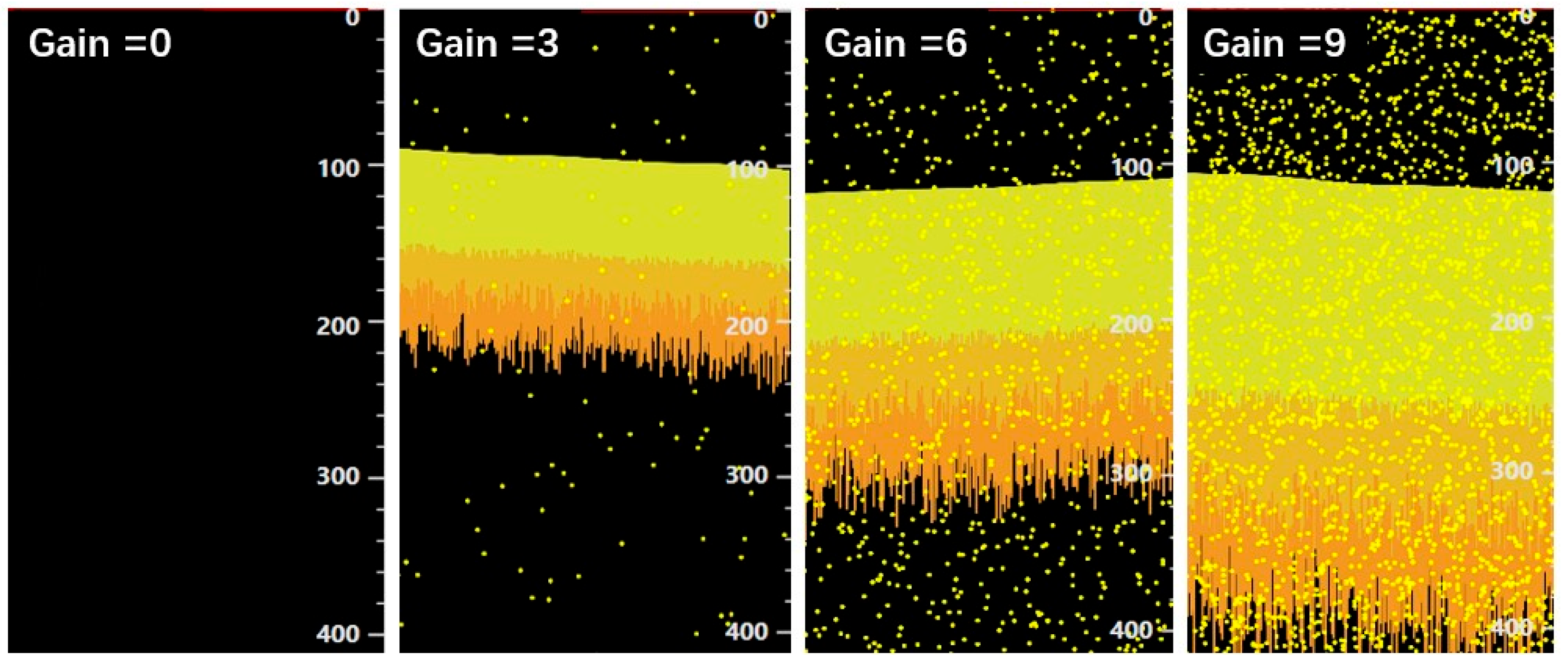
3.3.1. Gain
3.3.2. Noise and Clutter
3.4. Echo Sounder Equipment Simulation
3.4.1. Simulation Architecture Design
3.4.2. Simulation Effects
4. Conclusions
- (1)
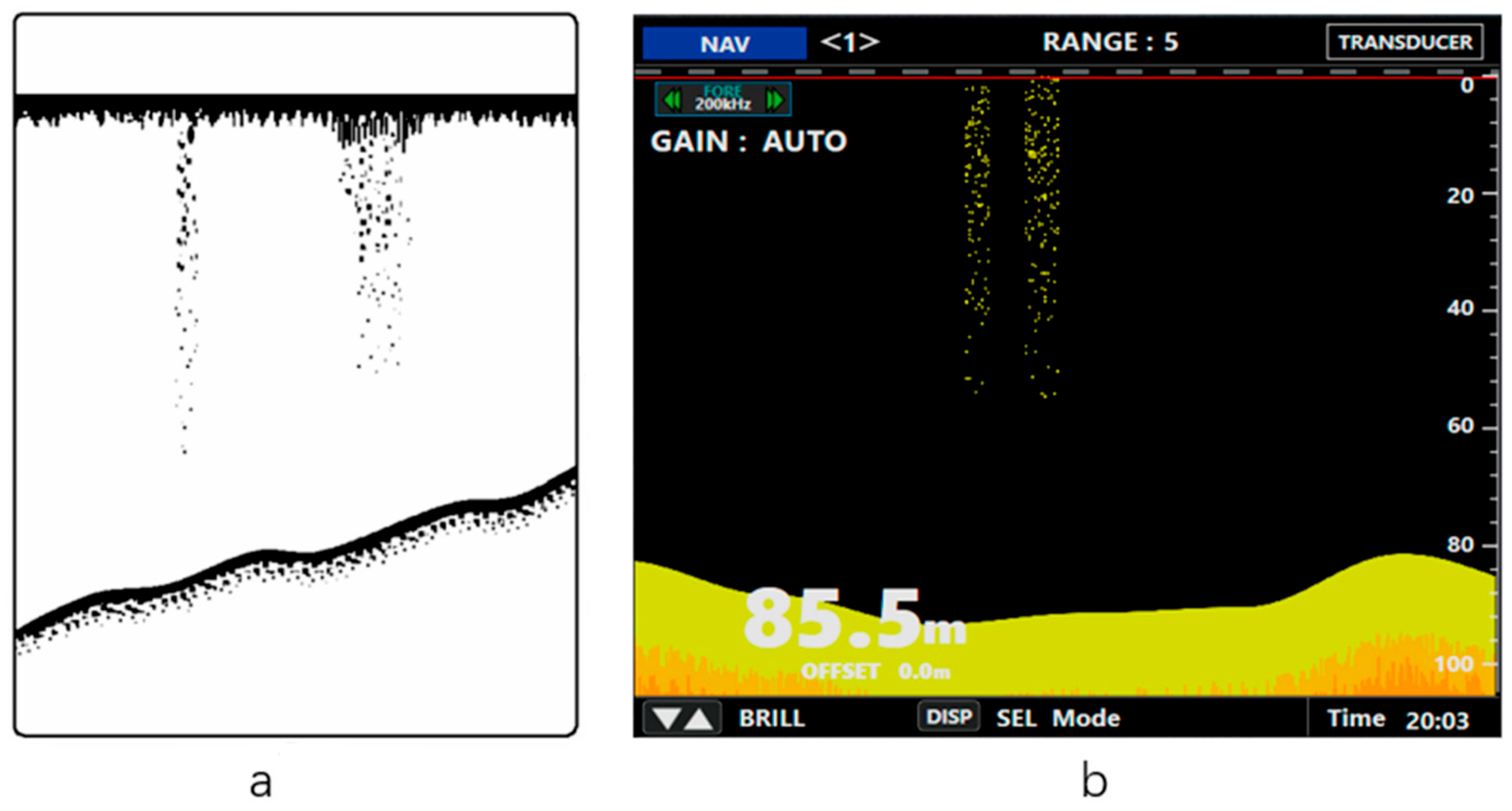
- Seabed Echo Simulation: A seabed echo rendering algorithm was proposed, which allows the simulated echoes generated by this algorithm to more accurately reproduce the echo images of actual equipment, achieving satisfactory results.
- (2)
- Impact of Incident Angle and Seabed Composition on Seabed Echo Simulation: Using the Jackson sound scattering model, the relationship between echo strength and incident angle for different seabed substrates was determined. Seabed echoes were rendered based on these results, producing images of seabed echoes for various seabed substrates and incident angles, visually illustrating the impact of incident angle and seabed substrate on seabed echo simulation.
- (3)
- Clutter and Noise Simulation: Through analysis and research on marine environmental noise and reverberation noise, the most prominent sources of noise and clutter were summarized, and their respective image simulations were conducted to enhance realism.
- (4)
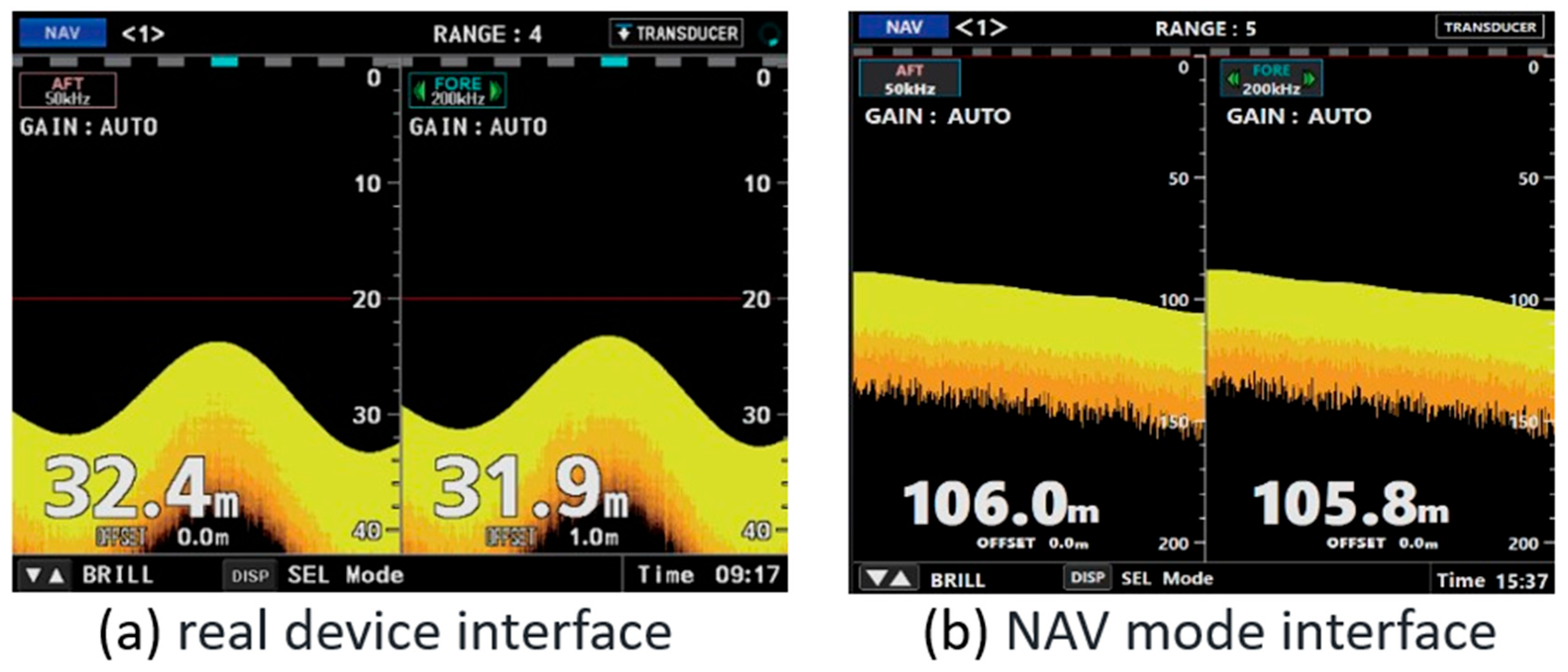
- Simulation Equipment Development: A simulation architecture for echo sounders was designed, and a complete simulator system was developed. This system effectively realizes the main functions of an echo sounder, such as range setting, gain adjustment, operating frequency setting, and display mode switching. The simulation visuals and operational realism closely approach that of actual equipment.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jin, Y.; Yin, Y. The Development Strategy of Marine Simulators under the Manila Amendment to the STCW Convention. Navig. China 2012, 35, 5–10. [Google Scholar]
- Yang, X.; Ren, H.; Lian, J.; Wang, D. VR interactive 3D virtual ship modeling and simulation. Navig. China 2022, 45, 37–42+49. [Google Scholar]
- Maritime Safety Administration of the People’s Republic of China. The Manila Amendment to the International Convention on Standards of Training, Certification and Watchkeeping for Seafarers, 1978; Dalian Maritime University Press: Dalian, China, 2010. [Google Scholar]
- Yang, C.; He, Q. Application and Prospect of Intelligent Ship. Sci. Technol. Innov. 2023, 75–77. [Google Scholar] [CrossRef]
- Jackson, D.R.; Baird, A.M.; Crisp, J.J.; Thomson, P.A.G. High-frequency bottom backscatter measurements in shallow water. J. Acoust. Soc. Am. 1986, 80, 1188–1199. [Google Scholar] [CrossRef]
- Jackson, D.R.; Briggs, K.B. High-frequency bottom backscattering: Roughness versus sediment volume scattering. J. Acoust. Soc. Am. 1992, 92, 962–977. [Google Scholar] [CrossRef]
- Zheng, Y.; Qin, Z.; Yu, S.; Ma, B.; Zhao, J.; Liu, M. Progress and Prospect of Seabed Acoustic Scattering Characteristics. J. Harbin Eng. Univ. 2024, 45, 748–757. [Google Scholar]
- Peng, Z.; Zhou, J.; Zhang, R. In-plane seabed scattering caused by inhomogeneous seabed and rough interface. Sci. Sin. (Phys. Mech. Astron.) 2004, 34, 378–391. [Google Scholar]
- Jackson, D.R.; Odom, R.I.; Boyd, M.L.; Ivakin, A.N. A geoacoustic bottom interaction model (GABIM). IEEE J. Ocean. Eng. 2010, 35, 603–617. [Google Scholar] [CrossRef]
- Weidner, E.; Weber, T.C. An acoustic scattering model for stratification interfaces. J. Acoust. Soc. Am. 2021, 150, 4353–4361. [Google Scholar] [CrossRef]
- Zhang, S.; Wu, J.; Yin, T. Simulation of sonar reverberation signal considering the ocean multipath and Doppler effect. Front. Mar. Sci. 2023, 10. [Google Scholar] [CrossRef]
- Thorsos, E.I.; Williams, K.L.; Chotiros, N.P.; Christoff, J.T.; Commander, K.W.; Greenlaw, C.F.; Holliday, D.V.; Jackson, D.R.; Lopes, J.L.; McGehee, D.E.; et al. An overview of SAX99: Acoustic measurements. IEEE J. Ocean. Eng. 2001, 26, 4–25. [Google Scholar] [CrossRef]
- Holland, C.W. Coupled scattering and reflection measurements in shallow water. IEEE J. Ocean. Eng. 2002, 27, 454–470. [Google Scholar] [CrossRef]
- Yang, Y. Study of high frequency seabed scattering based on Jackson model. Acoust. Electron. Eng. 2015, 33–36. [Google Scholar]
- Ohkawa, K.; Yamaoka, H.; Yamamoto, T. Acoustic backscattering from a sandy seabed. IEEE J. Ocean. Eng. 2005, 30, 700–708. [Google Scholar] [CrossRef]
- Yu, S.; Liu, B.; Yu, K.; Yang, Z.; Kan, G.; Zhang, X. Comparison of acoustic backscattering from a sand and a mud bottom in the South Yellow Sea of China. Ocean Eng. 2020, 202, 107145. [Google Scholar] [CrossRef]
- Zheng, P.; Zhang, H.; Pan, Z.; Qian, H. Imaging simulation and range analysis of multi-beam bathymetric sonar. Digit. Ocean Underw. Warf. 2023, 6, 664–669. [Google Scholar] [CrossRef]
- Jiang, N. Research on Simulation Testing Method of the Doppler Velocity Sonar. Master’s Thesis, Harbin Engineering University, Harbin, China, 2017. [Google Scholar]
- Ding, Y. Research on Echo Simulation and Image Generation Technology of Seabed Objects. Master’s Thesis, Northwestern Polytechnical University, Xi’an, China, 2006. [Google Scholar]
- Chen, D.; Ren, H.; Yin, J. Design and realization on simulation software of Echo sounder. Inf. Technol. J. 2013, 12, 3645–3649. [Google Scholar] [CrossRef]
- Zhou, J. Research on Virtual Echo Sounder Based on LabVIEW. Master’s Thesis, Huaqiao University, Quanzhou, China, 2015. [Google Scholar]
- Hou, C.; Li, H.; Wang, L.; Zhang, S. Research on virtual echo sounder based on LabVIEW. Comput. Program. Ski. Maint. 2015, 81+93. [Google Scholar] [CrossRef]
- Jackson, D.R.; Richardson, M.D. High-Frequency Seafloor Acoustics; Springer: New York, NY, USA, 2007. [Google Scholar]
- Zou, B. Study on Seafloor Sediment Parameter Inversion Based on Acoustic Backscattering Model. Ph.D. Thesis, Tianjin University, Tianjin, China, 2020. [Google Scholar]
- Zhou, J. Research on Denoising Method of Underwater Acoustic Image. Master’s Thesis, University of Electronic Science and Technology of China, Chengdu, China, 2019. [Google Scholar]
- Siano, D.; González, A.E. Noise and Environments; IntechOpen: London, UK, 2021. [Google Scholar] [CrossRef]
- Wenz, G.M. Acoustic Ambient Noise in the Ocean: Spectra and Sources. J. Acoust. Soc. Am. 1962, 34, 1936–1956. [Google Scholar] [CrossRef]
- Liu, B.; Huang, Y.; Chen, W.; Lei, J. Principles of Underwater Acoustics, 3rd ed.; Science Press: Beijing, China, 2019. [Google Scholar]
- Zhang, H.; Cheng, J.; Tian, M.; Liu, J.; Shao, G.; Shao, S. A Reverberation Noise Suppression Method of Sonar Image Based on Shearlet Transform. IEEE Sens. J. 2023, 23, 2672–2683. [Google Scholar] [CrossRef]
- Liu, G.; Liu, B.; Hu, J.; Cang, Y.; Zhao, N.; Zhou, B. Sonar image denoising in NSCT domain based on neutral set and bilateral filtering. J. Hunan Univ. (Nat. Sci.) 2023, 50, 19–27. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition | Abbreviation |
|---|---|---|
| ratio of sediment density to seawater density | density ratios | |
| ratio of acoustic wave propagation velocity in sediments to that in seawater | sound velocity ratio | |
| ratio of imaginary part to real part of wave number in sediments | parameter losses | |
| ratio of volume scattering coefficient to absorption coefficient of sedimentary layer | volume parameter | |
| spectral index of seabed undulating interface | spectral index | |
| spectral intensity of undulating seabed interface | spectrum intensity |
| Items | Values |
|---|---|
| LOA (length overall) | 116 m |
| LBP (length between perpendiculars) | 105 m |
| B (breadth molded) | 18 m |
| D (depth to main deck) | 8.35 m |
| V (design speed) | 16.9 kn |
| T (design draft) | 5.4 m |
| GT (gross tonnage) | 6106 t |
| Substrate | Average Size (mm) | Density Ratios | Sound Velocity Ratio | Parameter Losses | Volume Parameter | Spectral Index | Spectrum Intensity (cm4) |
|---|---|---|---|---|---|---|---|
| rock | — | 2.5 | 2.5 | 0.01374 | 0.002 | 3.25 | 0.01862 |
| sand–gravel | — | 2.5 | 1.5 | 0.014 | 0.002 | 3.25 | 0.014 |
| very coarse sand | 2.0 | 2.492159 | 1.286925 | 0.0164595 | 0.002 | 3.25 | 0.01293447 |
| open sand | 1.0 | 2.3139 | 1.2278 | 0.01566176 | 0.002 | 3.25 | 0.008601511 |
| medium sand | 0.5 | 2.151217 | 1.174087 | 0.0157149 | 0.002 | 3.25 | 0.00558833 |
| fine sand | 0.25 | 1.615902 | 1.139692 | 0.01610051 | 0.002 | 3.25 | 0.0035 |
| mucky | 0.02 | 1.149182 | 0.9881798 | 0.005651104 | 0.001 | 3.25 | 5.175 × 104 |
| clay | 0.002 | 1.144875 | 0.9801043 | 0.0014725417 | 0.001 | 3.25 | 5.175 × 104 |
| Substrate | Clay | Mucky | Fine Sand | Medium Sand | Open Sand | Very Coarse Sand | Sand–Gravel | Rock |
|---|---|---|---|---|---|---|---|---|
| Alpha (%) | 17.4 | 17.3 | 10.3 | 7.4 | 6.6 | 6.0 | 4.4 | 4.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Yang, X.; Ren, H.; Li, C. Design and Implementation of a Shipborne Echo Sounder Simulator Based on a Seabed Echo Scattering and Noise Model. J. Mar. Sci. Eng. 2024, 12, 1762. https://doi.org/10.3390/jmse12101762
Li S, Yang X, Ren H, Li C. Design and Implementation of a Shipborne Echo Sounder Simulator Based on a Seabed Echo Scattering and Noise Model. Journal of Marine Science and Engineering. 2024; 12(10):1762. https://doi.org/10.3390/jmse12101762
Chicago/Turabian StyleLi, Shihao, Xiao Yang, Hongxiang Ren, and Chang Li. 2024. "Design and Implementation of a Shipborne Echo Sounder Simulator Based on a Seabed Echo Scattering and Noise Model" Journal of Marine Science and Engineering 12, no. 10: 1762. https://doi.org/10.3390/jmse12101762