
Multiparameter Collaborative Optimization and Analysis of the Non-Penetrating Tunnel Thruster

 ,
,
Abstract
1. Introduction
- This paper takes the mooring static thrust as the optimization index and establishes a relationship model between multiple tunnel structural parameters and thrust based on the RSM (Response Surface Methodology) model. The contributions of different tunnel structural parameters to the thrust are evaluated. Then the optimal value of the model function is found, and the results of the optimization variables are obtained.
- The characteristics of the pressure distributions and flow fields on the tunnel surface of the NPT thruster before and after optimization are compared with the simulation method. Experiments are conducted to test the mooring static thrust of the NPT thrusters, and the deviations are analyzed to ensure the accuracy and reliability of the study.
2. Non-Penetrating Tunnel Thruster
3. Simulation of the Thruster Performance
3.1. Equations and Models
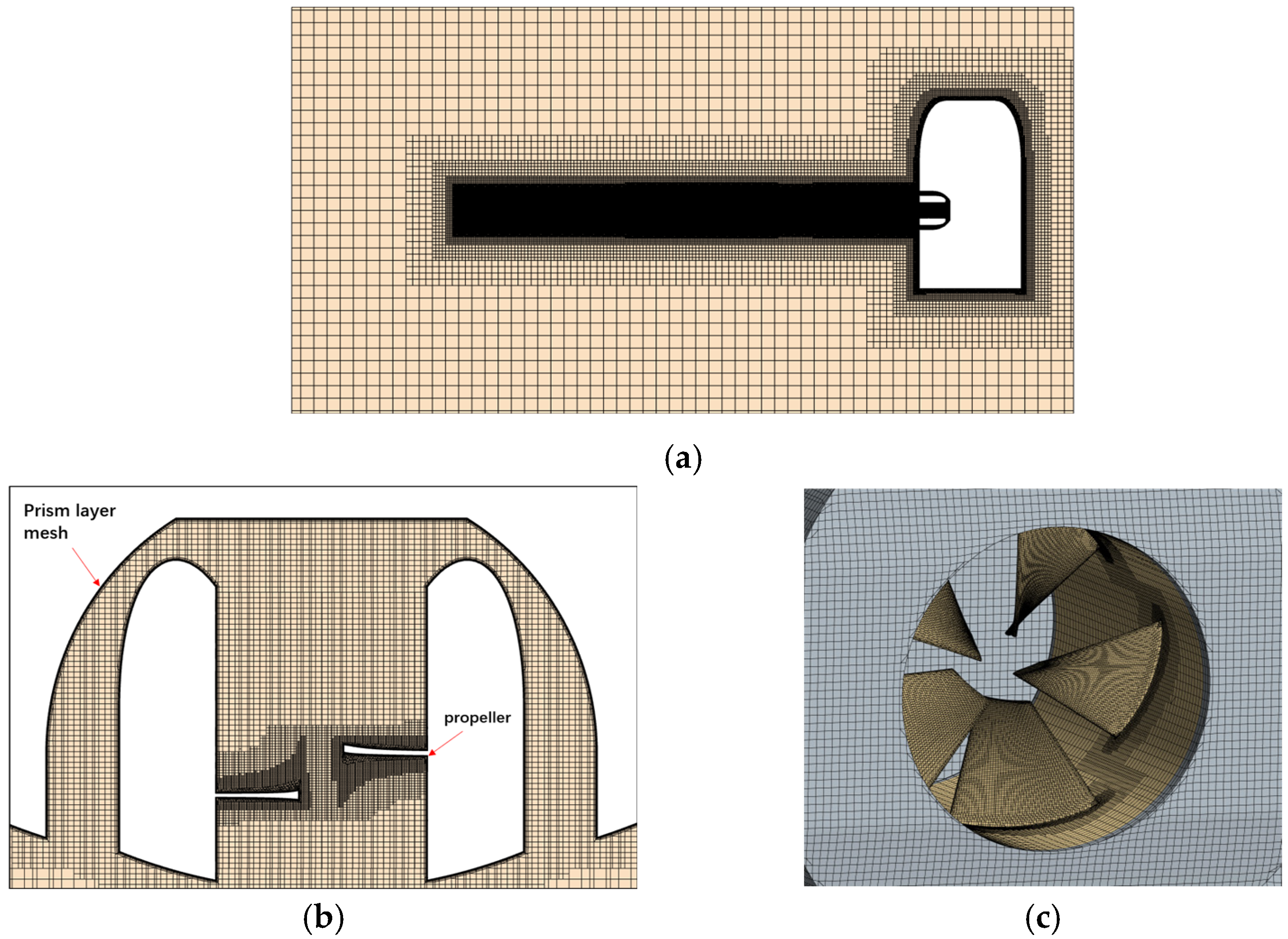
3.2. Research Objects and Preprocessing
3.3. Simulation Results
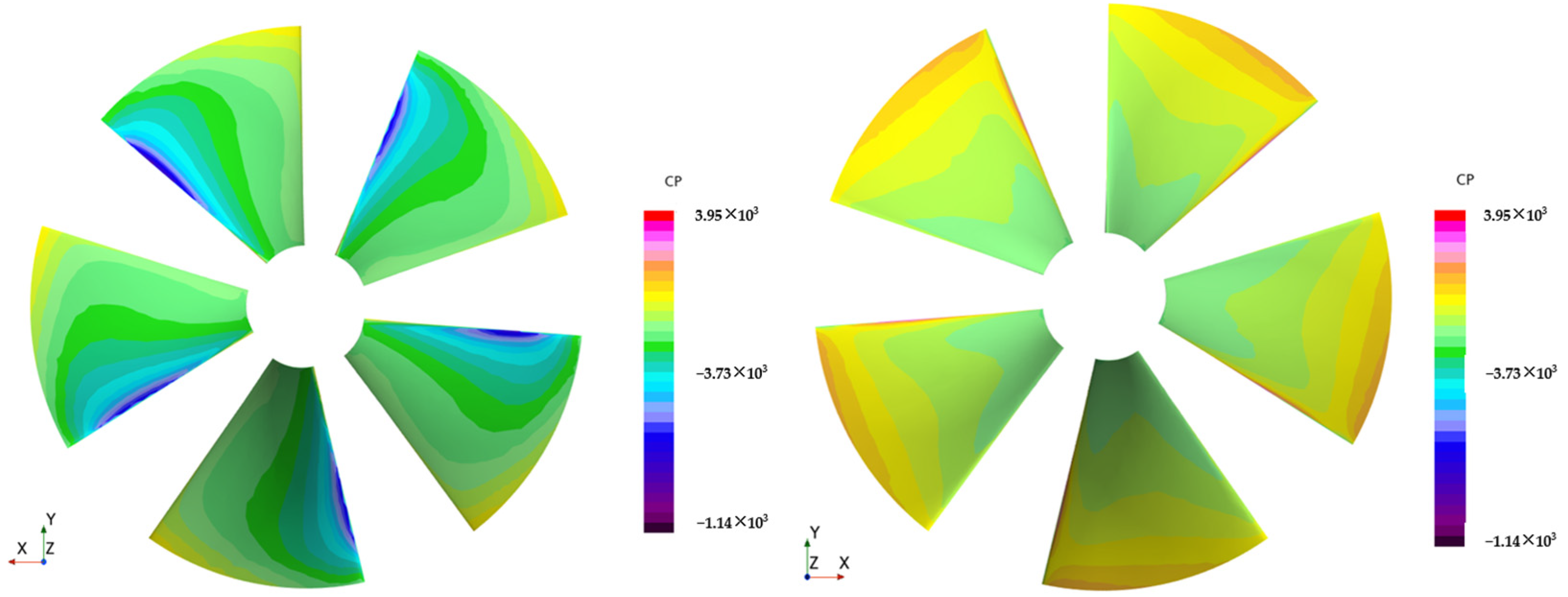
3.3.1. Pressure and Flow Field Analysis
3.3.2. Thrust Characteristic Calculation Results
4. Optimization of the Thruster
4.1. Parameter Selection
4.2. Model Establishment
4.3. Response Surface Model Analysis
4.4. Optimized Simulation Results
5. Propulsion Performance Improvement Mechanism Analysis
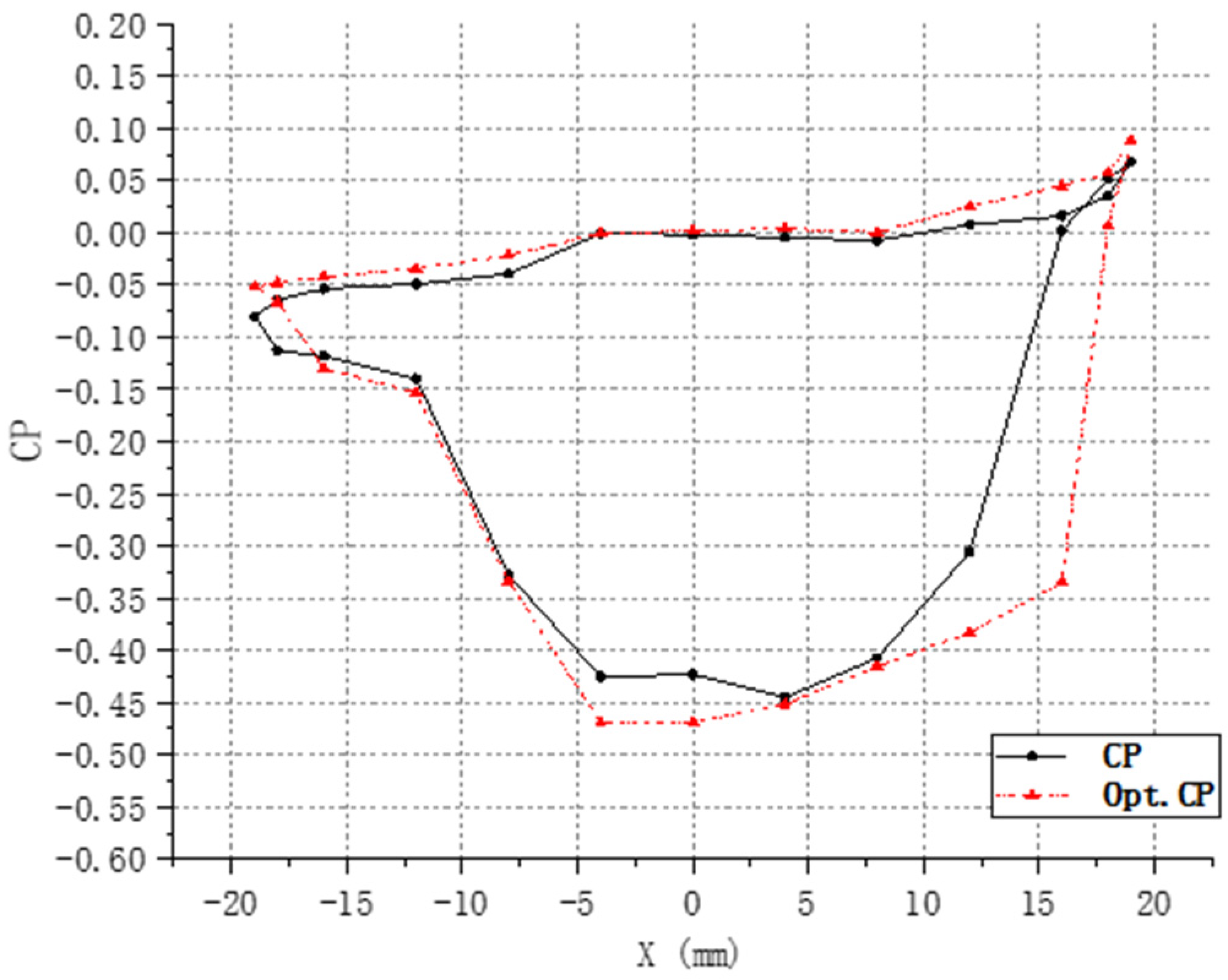
5.1. Pressure Analysis
5.2. Flow Field Analysis
6. Experiment
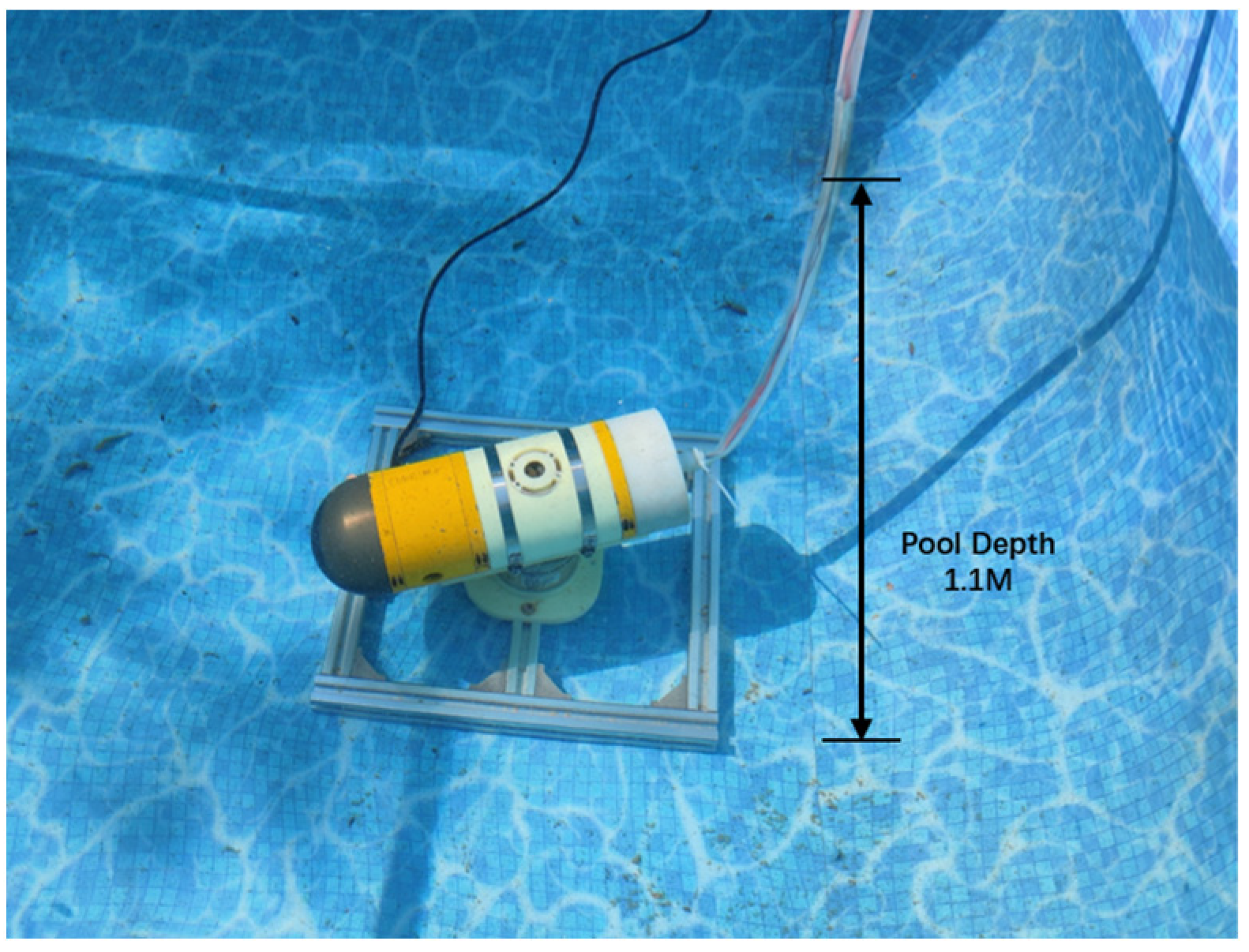
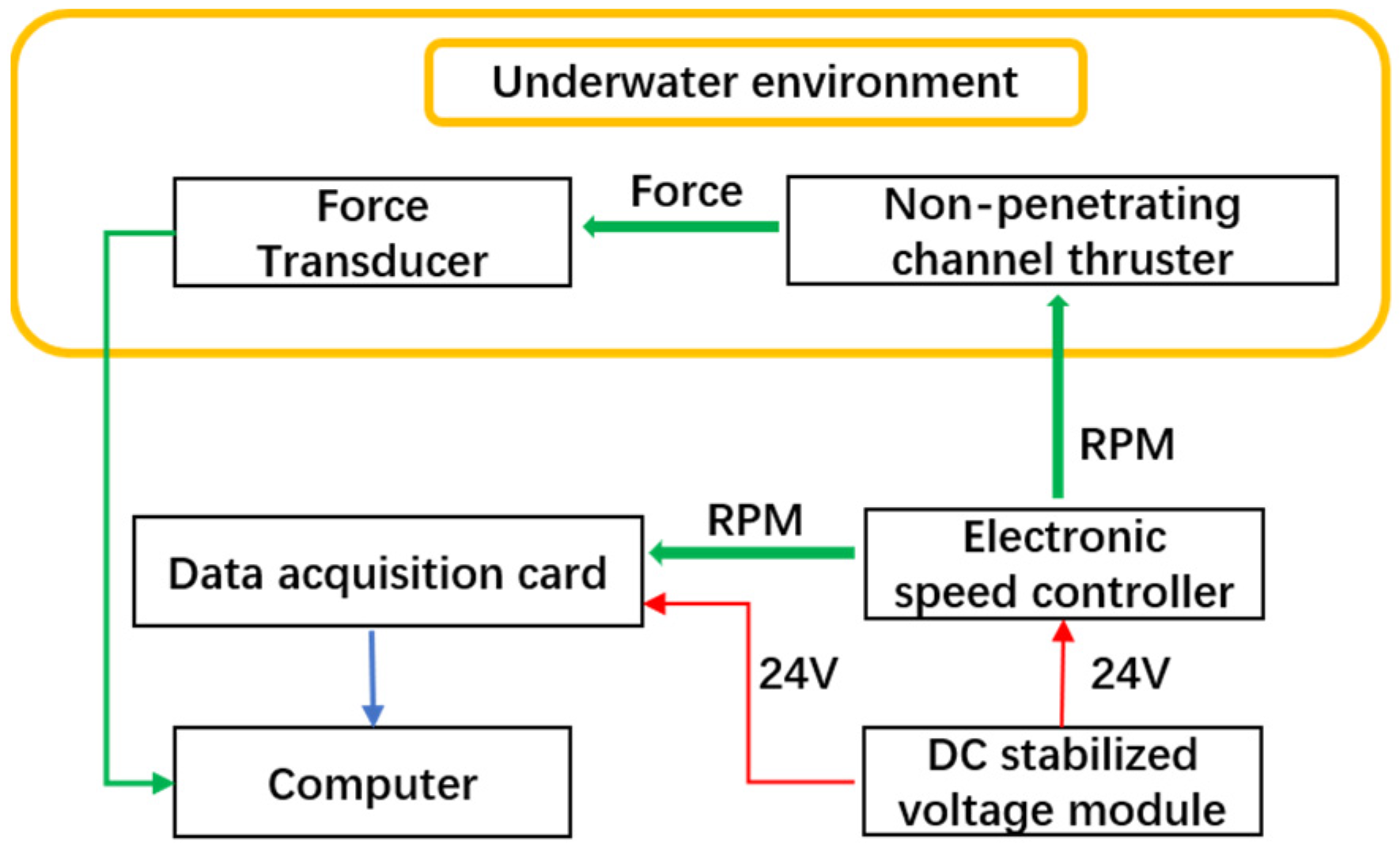
6.1. Experimental System Introduction
6.2. Experimental Results
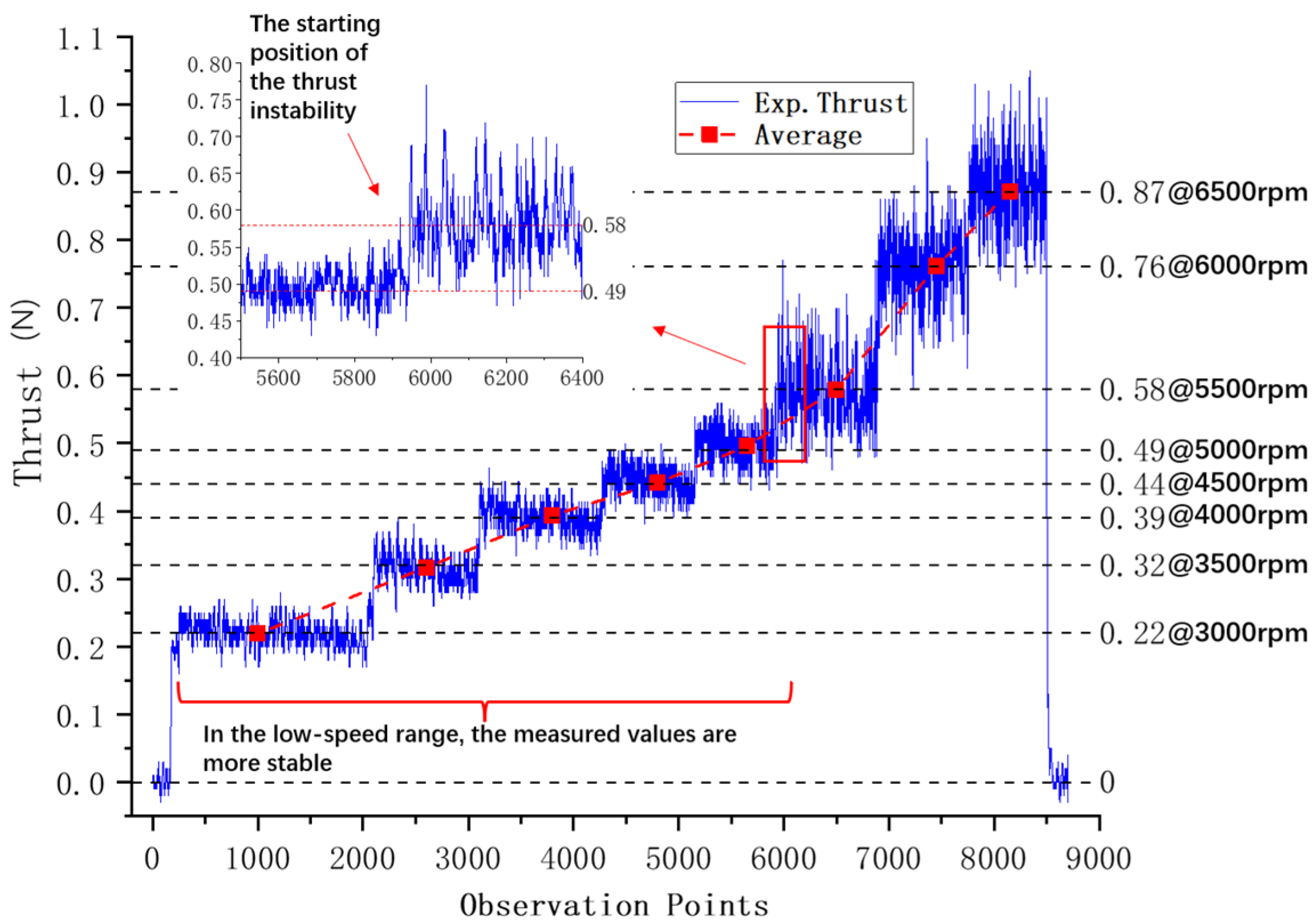
6.2.1. Thrust Analysis
6.2.2. Simulation Effectiveness Analysis
7. Conclusions
- (1)
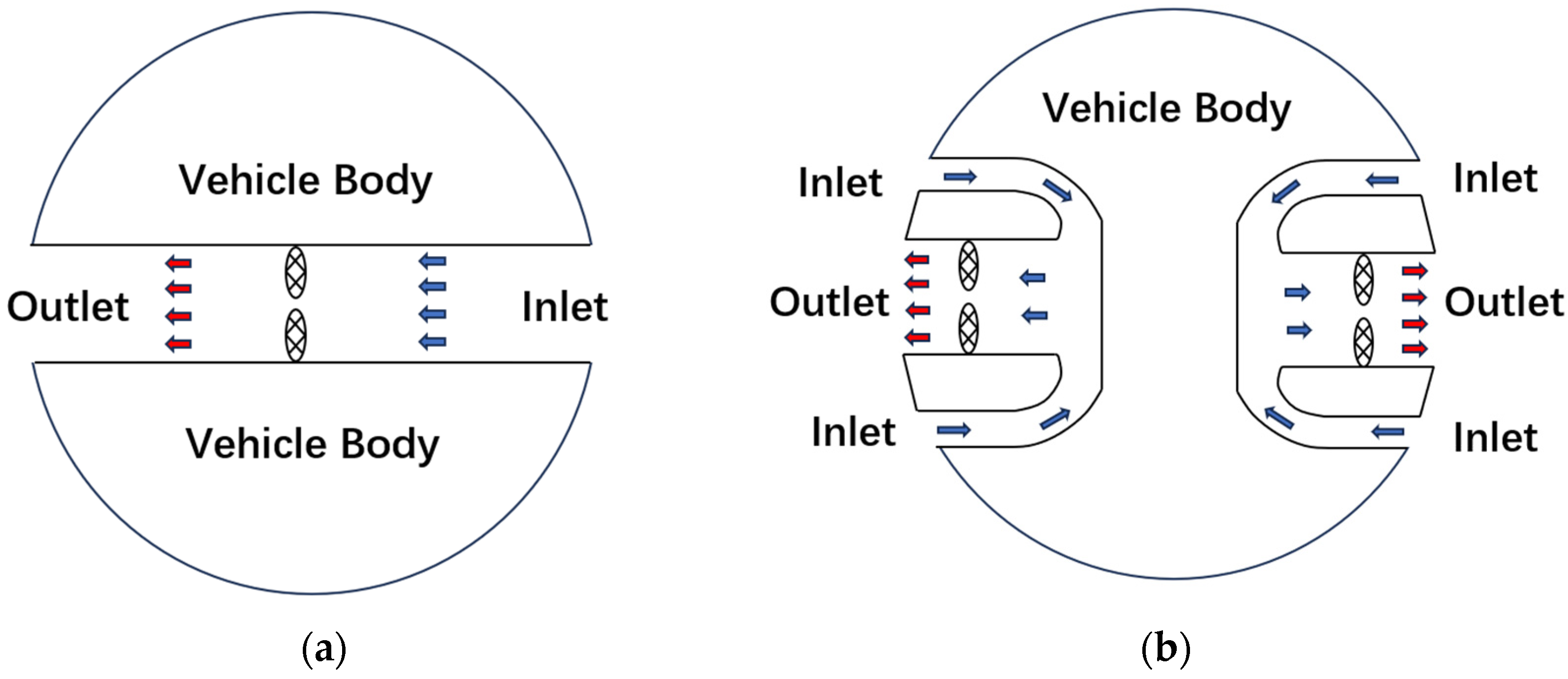
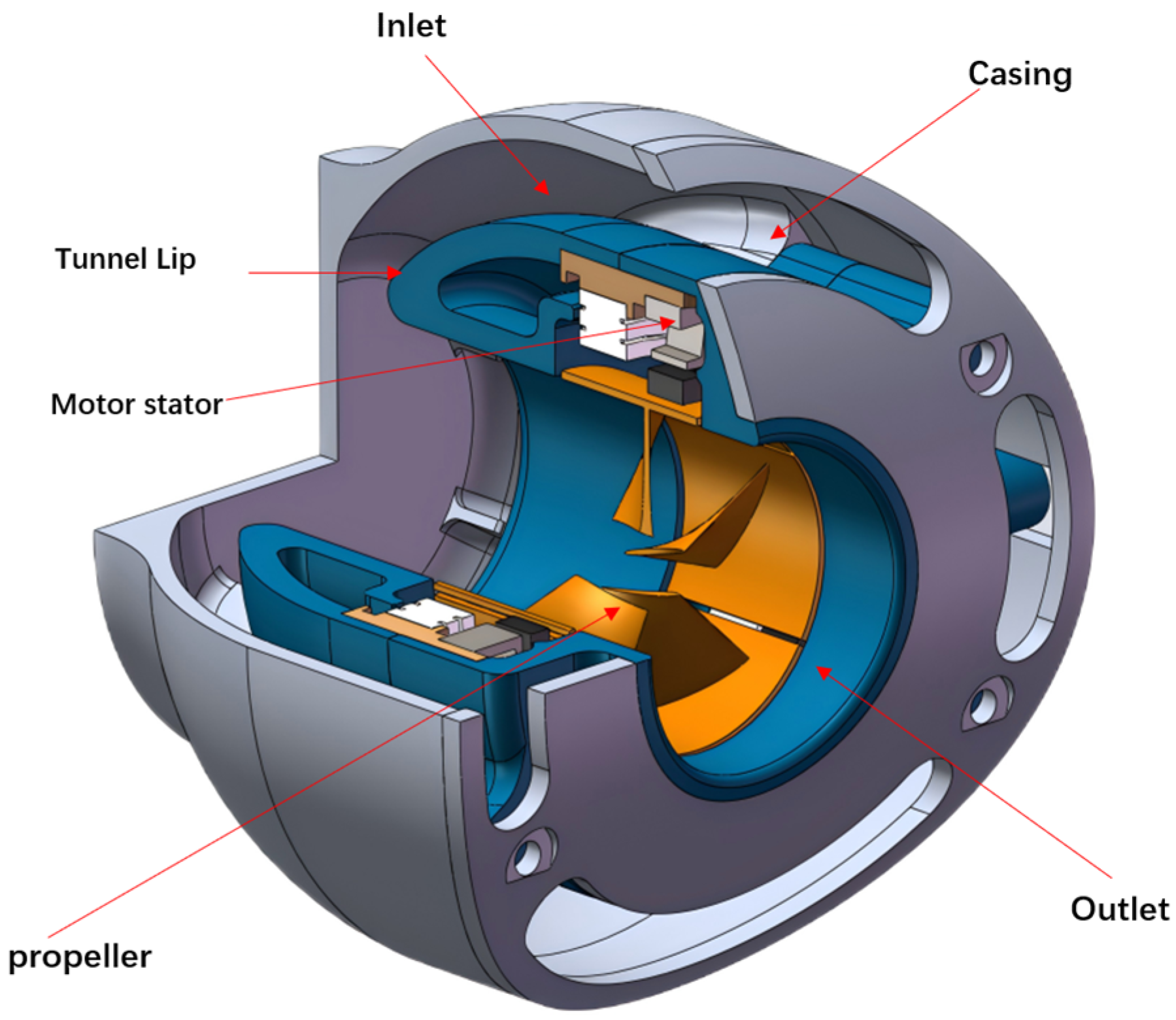
- A brand-new NPT thruster is designed based on shaftless hub propulsion technology. The main characteristic of the NPT thruster is that the inlet and outlet tunnels are located on the same side. This approach can improve the space utilization of the underwater vehicle while achieving the same thrust effect as the traditional tunnel thruster.
- (2)
- The structures of the NPT thruster are optimized with the response surface method. The relationship models between tunnel structure parameters and thrust are established on the basis of the RSM model, and the contribution of tunnel structure parameters is evaluated. Then the optimal value of the model function is found, and the results of the optimization variables are obtained. The order of the influence of the tunnel structural parameters on efficiency is the tunnel total diameter, the tunnel length, the tunnel lip curve, and the tunnel tail spacing.
- (3)
- The optimized NPT thruster shows a maximum thrust enhancement of 21.79% at the 5500 rpm. The average increase in thrust is 12.4% in the speed range, which proves the feasibility of the tunnel structural optimization. In the speed range of 5500 rpm–6500 rpm, the mean square deviation of the optimized thruster is reduced by at least 49.19% compared with the value before optimization. It proves that the optimized thruster is more stable at high speed.
- (4)
- The errors between the experimental and simulation values of the mooring static thrust are less than 8.26%. The average simulation error before optimization is 4.99%, and the average simulation error after optimization is 6.17%. It proves that the CFD simulation and analysis of the NPT thruster are reliable and reasonable.
- (1)
- The comparison between the NPT thrusters and the traditional tunnel thrusters should be conducted with the methods of simulations or experiments in order to analyze the differences in their performances and find more advantages or disadvantages of the NPT thrusters compared with the traditional thrusters.
- (2)
- The performances under different operating conditions should be analyzed, such as examining the flow field distribution and hydrodynamic performance of NPT when it is close to a wall.
- (3)
- The impact of the NPT thrusters on the underwater vehicles should be analyzed, like its influence on the navigational resistance of the vehicles, and further compared with the impact of the traditional tunnel thrusters.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, C.; Hong, B.; Teng, Y.; Li, T. Study on mathematical model for simulating ship berthing or unberthing with lateral thruster in harbor. J. Dalian Marit. Univ. 2007, 33, 29–32. [Google Scholar]
- Yao, Z.; Yan, Z. Hydrodynamic performance analysis and verification of transverse thrusters. J. Ship Mech. 2012, 16, 236–245. [Google Scholar]
- Pehrsson, L.; Mende, R.G. Design, model testing and application of controllable pitch bow thrusters. J. Am. Soc. Nav. Eng. 1961, 73, 787–796. [Google Scholar] [CrossRef]
- Sharma, R. Computer-aided Design of Bow Thrusters for Marine Vehicles. Tech. J. Mar. Eng. 2006, 86, 33–41. [Google Scholar]
- Carlton, J. Marine Propellers and Propulsion; Butterworth-Heinemann: Oxford, UK, 2018. [Google Scholar]
- Xiao, Z.; He, W.; Huang, W.; Li, Z. Progress and Prospect of Hydrodynamic Performance for Tunnel Thruster. J. Propuls. Technol. 2022, 43, 210102. [Google Scholar]
- Taniguchi, K. Investigations into Fundamental Characteristics and Operating Performances of Side Thruster; Mitsubishi Technical Bulletin No. 35; Mitsubishi Heavy Industries Ltd.: Tokyo, Japan, 1966. [Google Scholar]
- Chislett, M.; Bjorheden, O. Influence of Ship Speed on the Effectiveness of a Lateral-Thrust Unit; Hydrodynamics Section, Lyngby, Denmark, Report No. Hy-8; Hydro-and Aerodynamics Laboratory: Lyngby, Denmark, 1966. [Google Scholar]
- Norrby, R. The effectiveness of a bow thruster at low and medium ship speeds. Int. Shipbuild. Prog. 1967, 14, 315–318. [Google Scholar] [CrossRef]
- Ridley, D.E. Effect of Tunnel Entrance Configuration on Thruster Performance. Mar. Technol. SNAME News 1969, 6, 60–65. [Google Scholar] [CrossRef]
- Ridley, D.E. Observations on the effect of vessel speed on bow thruster performance. Mar. Technol. SNAME News 1971, 8, 93–96. [Google Scholar] [CrossRef]
- Furukawa, Y.; Kijima, K. Influence of Forward Speed on the Thruster Performance Used on Dynamic Positioning System of Offshore Platform. 1993. Available online: https://trid.trb.org/View/443901 (accessed on 19 May 2024).
- Kijima, K.; Furukawa, Y.; Hirakawa, T.; Maekawa, K. Theoretical estimation of influence of forward speed on the performance of bow thruster; Bow thruster seino ni oyobosu zenshin sokudo eikyo no rironteki suitei. Seibu Zosenkai Kaiho Trans. West-Jpn. Soc. Nav. Archit. 1998, 69–79. [Google Scholar] [CrossRef]
- Lu, P.; Wang, S. CFD Simulation of Propeller and Tunnel Thruster Performance. In Proceedings of the 33rd ASME International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar]
- Yu, C.; Yang, C. Study of tunnel thruster performance and flow by quasi-steady Reynolds-averaged Navier-Stokes simulation. J. Shanghai Jiaotong Univ. Sci. 2016, 21, 662–671. [Google Scholar] [CrossRef]
- Kinnas, S.A.; Chang, S.-H.; He, L.; Johannessen, J.T. Performance prediction of a cavitating RIM driven tunnel thruster. In Proceedings of the First International Symposium on Marine Propulsors SMP, Trondheim, Norway, 22–24 June 2009; pp. 435–442. [Google Scholar]
- Terry, S. A Study of the Hydrodynamic Interactions Between Bow Thrusters. Catal. Sci. Technol. 2015, 6, 677–680. [Google Scholar]
- Beveridge, J.L. Design and Performance of Bow Thrusters. Mar. Technol. SNAME News 1972, 9, 439–453. [Google Scholar] [CrossRef]
- Mohan, A. Numerical Analysis of Bow Tunnel Thruster Performance. 2017. Available online: https://www.semanticscholar.org/paper/Numerical-Analysis-of-Bow-Tunnel-Thruster-Mohan/0980a7d12f899d36b64f3979ac6693823c4fe5c0 (accessed on 19 May 2024).
- Feng, Y.; Chen, Z.; Dai, Y.; Zhang, Z.; Wang, P. An experimental and numerical investigation on hydrodynamic characteristics of the bow thruster. Ocean Eng. 2020, 209, 107348. [Google Scholar]
- Baniela, S.I. The Performance of a Tunnel Bow Thruster with Slow Speed Ahead: A Revisited Issue. J. Navig. 2009, 62, 631–642. [Google Scholar] [CrossRef]
- Wei, Q.; Yang, Y.; Zhou, X.; Hu, Z.; Li, Y.; Fan, C.; Zheng, Q.; Wang, Z. Enhancing Inter-AUV Perception: Adaptive 6-DOF Pose Estimation with Synthetic Images for AUV Swarm Sensing. Drones 2024, 8, 486. [Google Scholar] [CrossRef]
- Jiang, H.; Ouyang, W.; Sheng, C.; Lan, J.; Bucknall, R. Numerical investigation on hydrodynamic performance of a novel shaftless rim-driven counter-rotating thruster considering gap fluid. Appl. Ocean Res. 2022, 118, 102967. [Google Scholar] [CrossRef]
- Felicjancik, J.; Kowalczyk, S.; Felicjancik, K.; Kawecki, K. Numerical simulations of hydrodynamic open-water characteristics of a ship propeller. Pol. Marit. Res. 2016, 23, 16–22. [Google Scholar] [CrossRef]
- Tu, T.N. Numerical simulation of propeller open water characteristics using RANSE method. Alex. Eng. J. 2019, 58, 531–537. [Google Scholar] [CrossRef]
- Piskur, P.; Szymak, P.; Przybylski, M.; Naus, K.; Jaskólski, K.; Żokowski, M. Innovative energy-saving propulsion system for low-speed biomimetic underwater vehicles. Energies 2021, 14, 8418. [Google Scholar] [CrossRef]
- Gough, W.T.; Smith, H.J.; Savoca, M.S.; Czapanskiy, M.F.; Fish, F.E.; Potvin, J.; Bierlich, K.; Cade, D.E.; Di Clemente, J.; Kennedy, J. Scaling of oscillatory kinematics and Froude efficiency in baleen whales. J. Exp. Biol. 2021, 224, jeb237586. [Google Scholar] [CrossRef]
- Heller, V. Development of wave devices from initial conception to commercial demonstration. In Comprehensive Renewable Energy; Elsevier: Amsterdam, The Netherlands, 2012. [Google Scholar]
- Bian, T.; Liu, L.; Cai, W.; Jiang, W.; Liu, Z. Multi-objective optimization design of shaftless rim-driven thruster. Proc. Inst. Mech. Eng. Part M-J. Eng. Marit. Environ. 2023, 238, 633–639. [Google Scholar] [CrossRef]
- Jones, D.R. A taxonomy of global optimization methods based on response surfaces. J. Glob. Optim. 2001, 21, 345–383. [Google Scholar] [CrossRef]
- Chelladurai, S.J.S.; Murugan, K.; Ray, A.P.; Upadhyaya, M.; Narasimharaj, V.; Gnanasekaran, S. Optimization of process parameters using response surface methodology: A review. Mater. Today Proc. 2021, 37, 1301–1304. [Google Scholar] [CrossRef]
- Nie, Y.; Ouyang, W.; Zhang, Z.; Li, G.; Zheng, R. Multi-Parameter Optimization Analysis of Hydrodynamic Performance for Rim-Driven Thruster. Energies 2023, 16, 891. [Google Scholar] [CrossRef]
- Zhao, Y.; Geng, L.; Yang, Y.; Hu, Z. Research on Aerodynamic Characteristics of a Ducted Propeller Hovering near the Water Surface Based on a Lattice Boltzmann Method. J. Mar. Sci. Eng. 2023, 11, 1708. [Google Scholar] [CrossRef]
- Cabral, B.; Leedom, L.C. Imaging vector fields using line integral convolution. In Proceedings of the 20th Annual Conference on Computer Graphics and Interactive Techniques, Anaheim, CA, USA, 2–6 August 1993; pp. 263–270. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Propeller Diameter d/mm | Tunnel Total Diameter D/mm | Standard Speed n/rpm | Number of Blades |
|---|---|---|---|
| 20 | 60 | 5000 | 5 |
| Parameter | |
|---|---|
| Time | Steady |
| Space | Three dimensional |
| Flow | Segregated flow |
| Gradient metrics | Gradient |
| Equation state | Constant density |
| Viscous regime | Turbulent |
| Turbulent model | RNG k-ε model |
| Parameter | |
|---|---|
| T | Mooring static thrust |
| Q | Torque |
| Density of water | |
| d | Propeller diameter |
| Thruster efficiency, N/W |
| Factor | −1 | Level 0 | 1 |
|---|---|---|---|
| —tunnel length | 28 | 32 | 36 |
| —tunnel lip curve | 13 | 15 | 17 |
| —tunnel total diameter | 46 | 49 | 52 |
| —tunnel tail spacing | 4 | 5 | 6 |
| Case | Tunnel Length | Tunnel Lip Curve | Tunnel Total Diameter | Tunnel Tail Spacing | Y Thrust/N |
|---|---|---|---|---|---|
| 1 | −1 | −1 | 0 | 0 | 0.5332 |
| 2 | 1 | −1 | 0 | 0 | 0.4483 |
| 3 | −1 | 1 | 0 | 0 | 0.5492 |
| 4 | 1 | 1 | 0 | 0 | 0.5075 |
| 5 | 0 | 0 | −1 | −1 | 0.4610 |
| 6 | 0 | 0 | 1 | −1 | 0.5578 |
| 7 | 0 | 0 | −1 | 1 | 0.4959 |
| 8 | 0 | 0 | 1 | 1 | 0.5149 |
| 9 | −1 | 0 | 0 | −1 | 0.5477 |
| 10 | 1 | 0 | 0 | −1 | 0.4584 |
| 11 | −1 | 0 | 0 | 1 | 0.5128 |
| 12 | 1 | 0 | 0 | 1 | 0.4472 |
| 13 | 0 | −1 | −1 | 0 | 0.4591 |
| 14 | 0 | 1 | −1 | 0 | 0.4789 |
| 15 | 0 | −1 | 1 | 0 | 0.5243 |
| 16 | 0 | 1 | 1 | 0 | 0.5671 |
| 17 | −1 | 0 | −1 | 0 | 0.4707 |
| 18 | 1 | 0 | −1 | 0 | 0.4546 |
| 19 | −1 | 0 | 1 | 0 | 0.5948 |
| 20 | 1 | 0 | 1 | 0 | 0.4773 |
| 21 | 0 | −1 | −1 | −1 | 0.4666 |
| 22 | 0 | 1 | −1 | −1 | 0.5172 |
| 23 | 0 | −1 | −1 | 1 | 0.4945 |
| 24 | 0 | 1 | −1 | 1 | 0.5038 |
| 25 | 0 | 0 | 0 | 0 | 0.4967 |
| 26 | 0 | 0 | 0 | 0 | 0.4917 |
| 27 | 0 | 0 | 0 | 0 | 0.4960 |
| 28 | 0 | 0 | 0 | 0 | 0.4943 |
| 29 | 0 | 0 | 0 | 0 | 0.4960 |
| Constant | |||||||
|---|---|---|---|---|---|---|---|
| −1.1545 | 0.063897 | −0.107148 | 0.0135 | 0.368065 | 0.00135 | −0.002113 | |
| 0.001489 | 0.000962 | −0.005166 | −0.006484 | 0.000048 | 0.001688 | 0.000845 | −0.002232 |
| Source | Sum of Square | Degrees of Freedom | Mean Squared Error | F-Value | p-Value Prob > F |
|---|---|---|---|---|---|
| Model | 0.0381 | 14 | 0.0027 | 25.85 | <0.0001 |
| 0.0143 | 1 | 0.0143 | 136.18 | <0.0001 | |
| 0.0033 | 1 | 0.0033 | 30.92 | <0.0001 | |
| 0.0144 | 1 | 0.0144 | 136.91 | <0.0001 | |
| 0.0001 | 1 | 0.0001 | 1.23 | 0.2857 | |
| 0.0005 | 1 | 0.0005 | 4.43 | 0.0539 | |
| 0.0026 | 1 | 0.0026 | 24.41 | 0.0002 | |
| 0.0001 | 1 | 0.0001 | 1.35 | 0.2652 | |
| 0.0001 | 1 | 0.0001 | 1.26 | 0.2797 | |
| 0.0004 | 1 | 0.0004 | 4.05 | 0.0637 | |
| 0.0015 | 1 | 0.0015 | 14.37 | 0.0020 | |
| 0.00003 | 1 | 0.000004 | 0.0362 | 0.8518 | |
| 0.0003 | 1 | 0.0003 | 2.81 | 0.1161 | |
| 0.0004 | 1 | 0.0004 | 3.56 | 0.0800 | |
| 0.0000 | 1 | 0.0000 | 0.3066 | 0.5885 | |
| Residual | 0.0015 | 14 | 0.0001 | ||
| Lack of fit | 0.0014 | 10 | 0.0001 | 5.29 | 0.0614 |
| Error | 0.0001 | 4 | |||
| Cor total | 0.0396 | 28 |
| Diameter mm | Boat Length mm | Head Length mm | Thruster Distance from the Head of the Platform mm |
|---|---|---|---|
| 123.8 | 600 | 80 | 360 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, J.; Yang, Y.; Wang, C.; Hu, Z.; Zheng, Q.; Fan, C. Multiparameter Collaborative Optimization and Analysis of the Non-Penetrating Tunnel Thruster. J. Mar. Sci. Eng. 2024, 12, 1960. https://doi.org/10.3390/jmse12111960
Guo J, Yang Y, Wang C, Hu Z, Zheng Q, Fan C. Multiparameter Collaborative Optimization and Analysis of the Non-Penetrating Tunnel Thruster. Journal of Marine Science and Engineering. 2024; 12(11):1960. https://doi.org/10.3390/jmse12111960
Chicago/Turabian StyleGuo, Jinyu, Yi Yang, Chao Wang, Zhiqiang Hu, Quan Zheng, and Chuanzhi Fan. 2024. "Multiparameter Collaborative Optimization and Analysis of the Non-Penetrating Tunnel Thruster" Journal of Marine Science and Engineering 12, no. 11: 1960. https://doi.org/10.3390/jmse12111960
APA StyleGuo, J., Yang, Y., Wang, C., Hu, Z., Zheng, Q., & Fan, C. (2024). Multiparameter Collaborative Optimization and Analysis of the Non-Penetrating Tunnel Thruster. Journal of Marine Science and Engineering, 12(11), 1960. https://doi.org/10.3390/jmse12111960