

Numerical Simulation of Seakeeping Performance of a Barge Using Computational Fluid Dynamics (CFD)-Modified Potential (CMP) Model



Abstract
:1. Introduction
2. Simulation Modeling
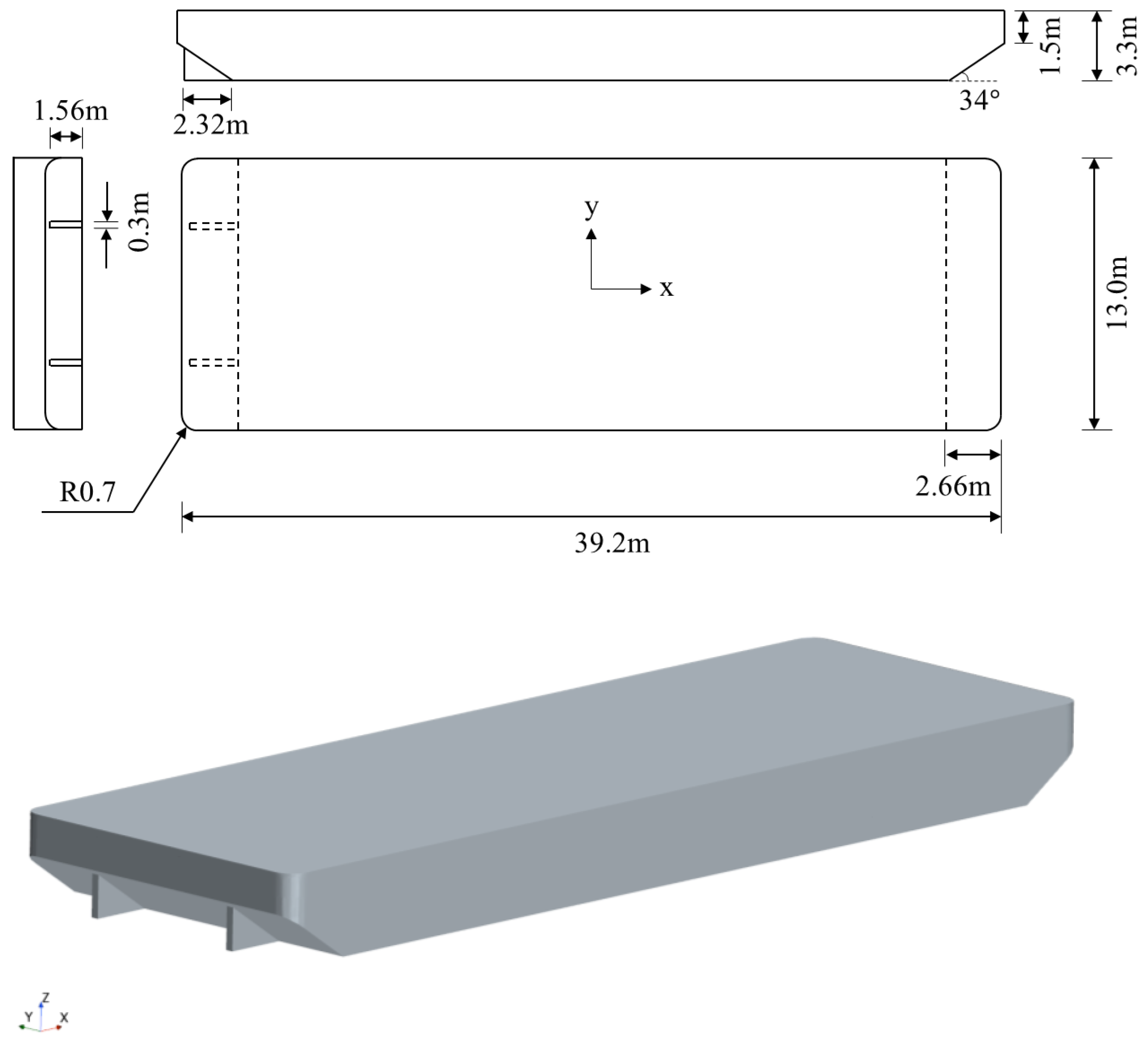
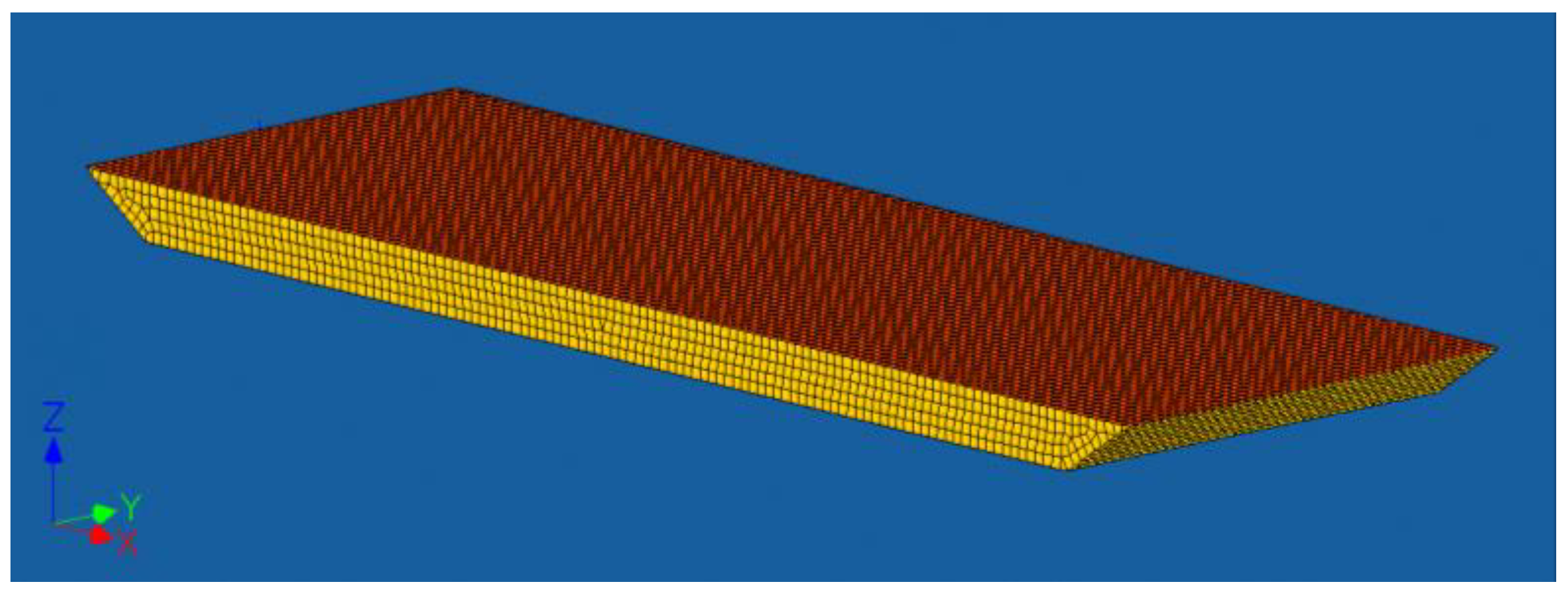
2.1. Target Model
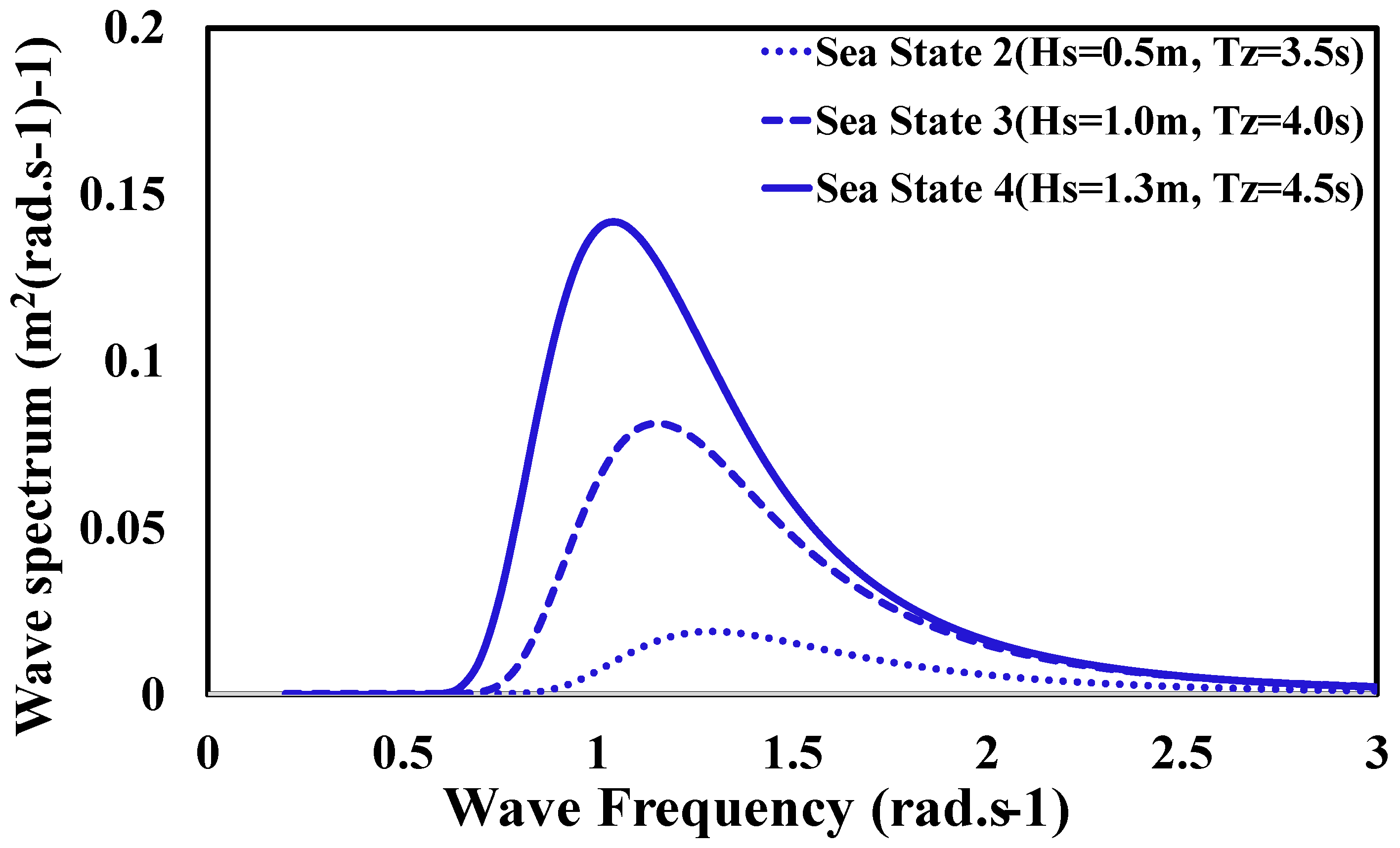
2.2. Sea Environmental Conditions and Wave Spectrum
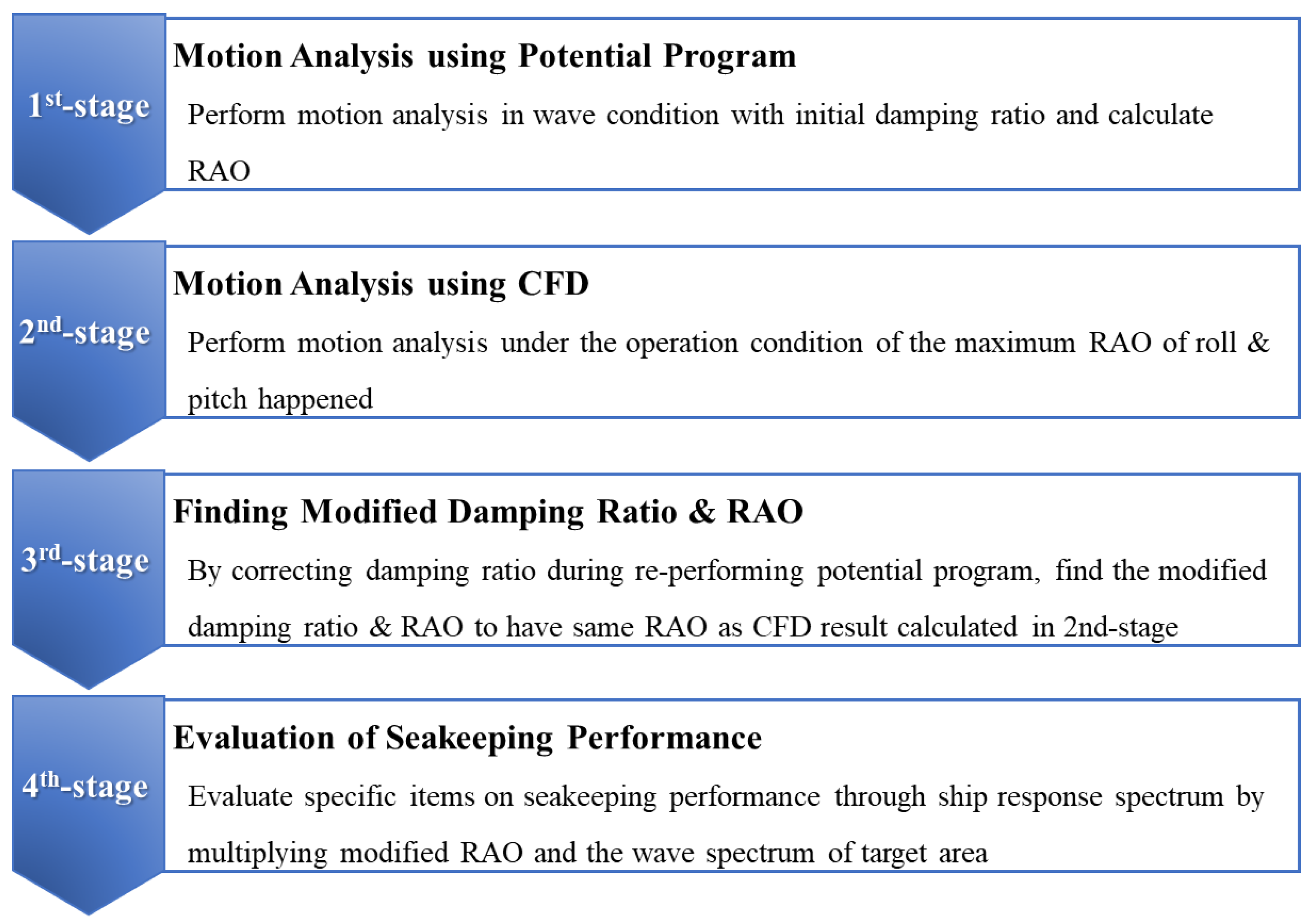
2.3. Simulation Procedure of CMP Model
- [First stage] Motion analysis using potential flow program
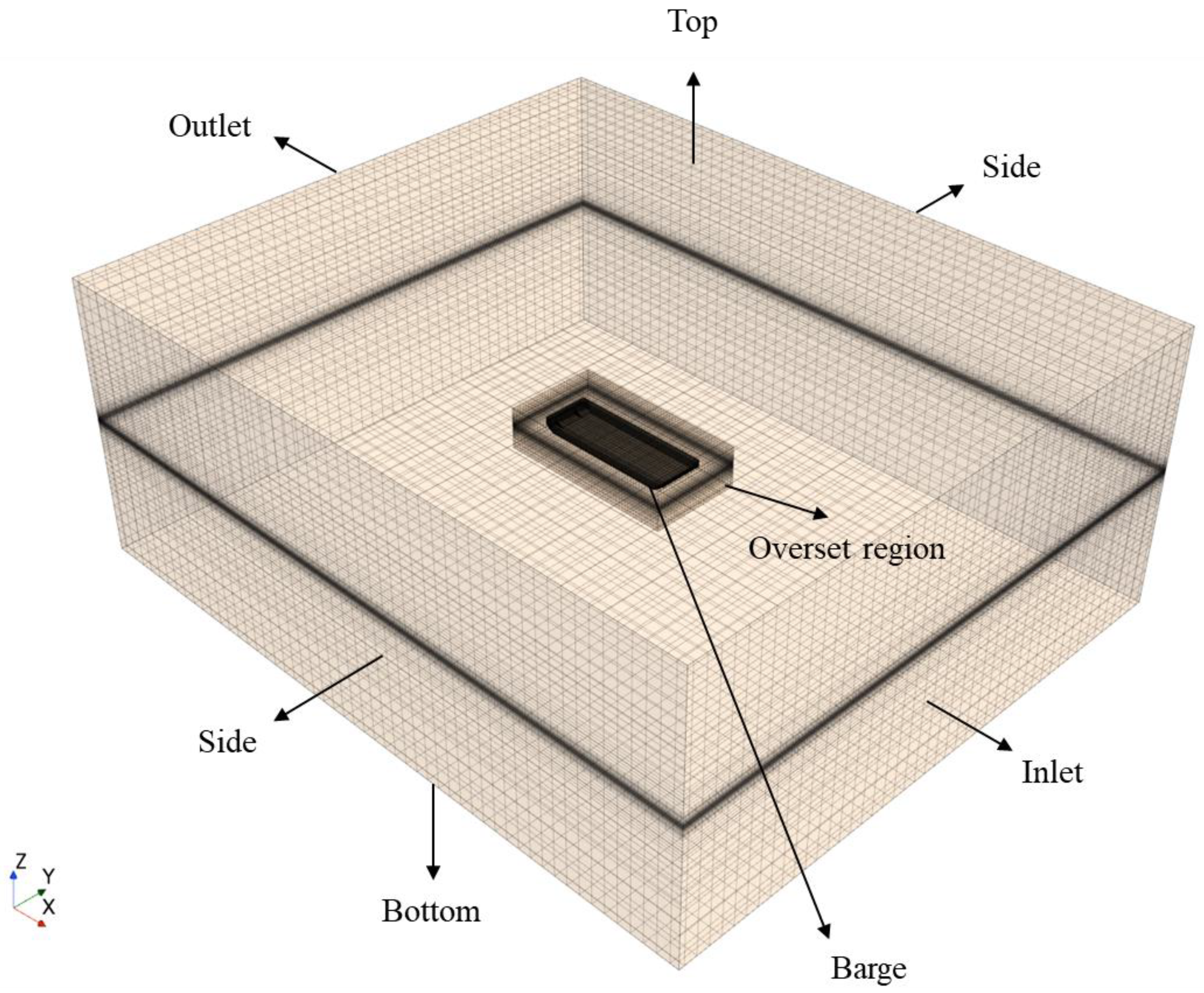
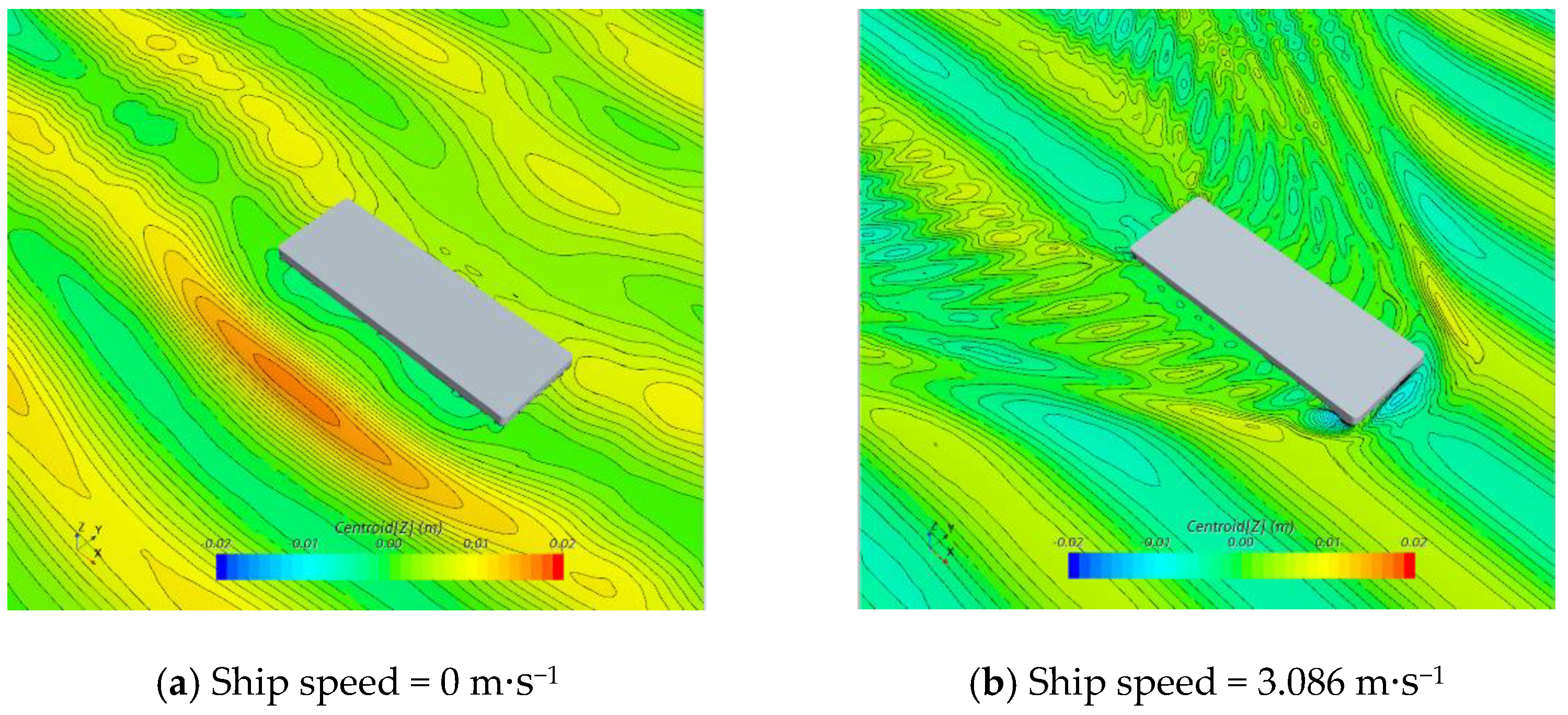
- [Second stage] Motion analysis using CFD
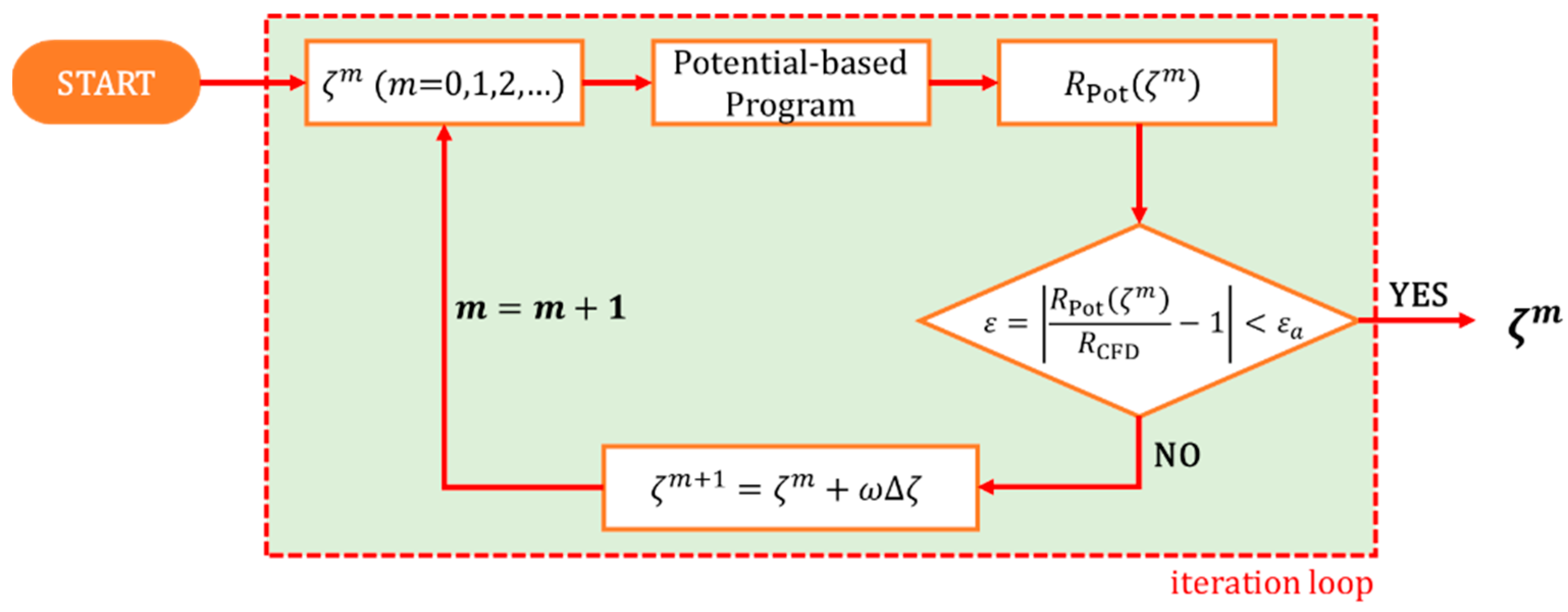
- [Third stage] Finding modified damping ratio and RAO
- [Fourth stage] Evaluation of seakeeping performance
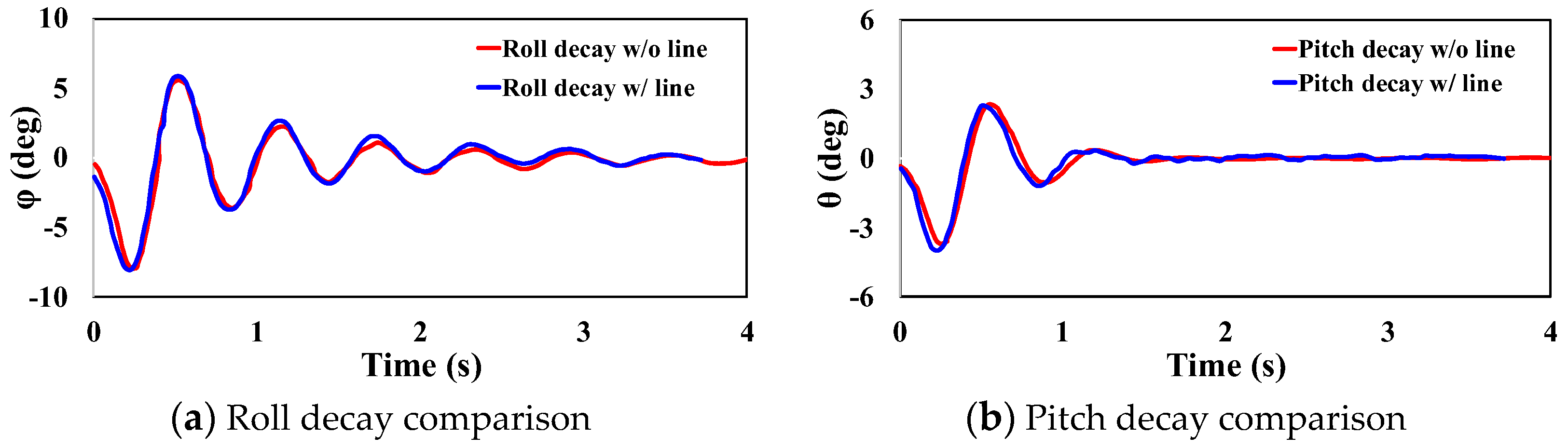
2.4. Experiment for Validation

3. Results and Discussion
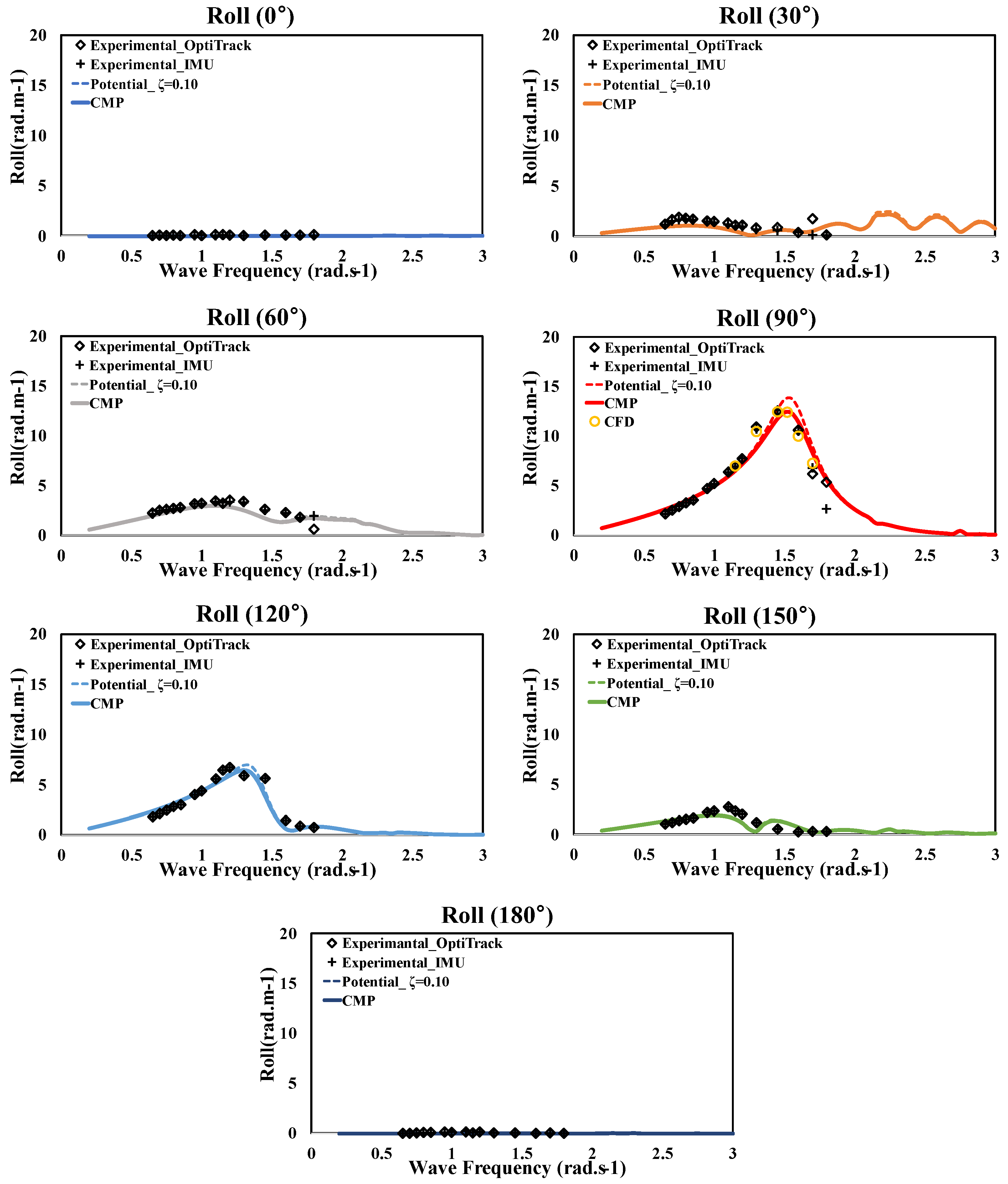
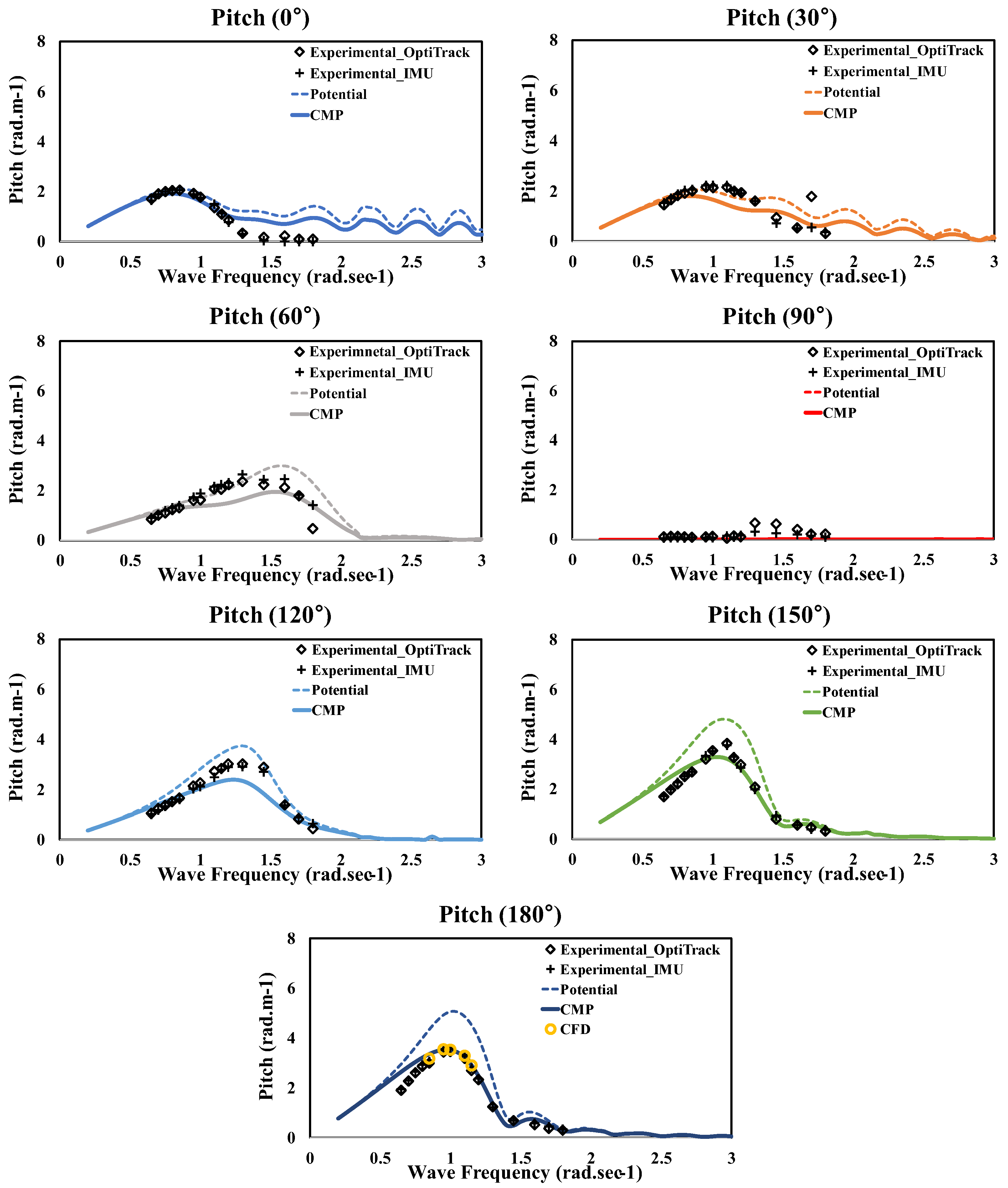
3.1. Results of RAOs
3.2. Results of Seakeeping Performance
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chun, H.H.; Chun, S.H.; Kim, S.Y. Roll damping characteristics of a small fishing vessel with a central wing. Ocean. Eng. 2001, 28, 1601–1619. [Google Scholar] [CrossRef]
- Prini, F.; Benson, S.; Birmingham, R.W.; Dow, R.S.; Phillips, H.J.; Sheppard, P.J.; Varas, J.M. Seakeeping analysis of a high-speed search and rescue craft by linear potential theory. In Proceedings of the International Conference on Lightweight Design of Marine Structures, Glasgow, UK, 9–11 November 2015; pp. 87–96. [Google Scholar]
- Sclavounos, P.D.; Borgen, H. Seakeeping analysis of a high-speed monohull with a motion-control bow hydrofoil. J. Ship Res. 2004, 48, 77–117. [Google Scholar] [CrossRef]
- Lewandowski, E.M. Multi-vessel seakeeping computations with linear potential theory. Ocean Eng. 2008, 35, 1121–1131. [Google Scholar] [CrossRef]
- Zhang, X.; Bandyk, P.; Beck, R.F. Seakeeping computations using double-body basis flows. Appl. Ocean Res. 2010, 32, 471–482. [Google Scholar] [CrossRef]
- Jung, K.H.; Chang, K.A.; Huang, E.T. Two-dimensional flow characteristics of wave interactions with a free-rolling rectangular structure. Ocean Eng. 2005, 32, 1–20. [Google Scholar] [CrossRef]
- Toxopeus, S.; Sadat-Hosseini, H.; Visonneau, M.; Guilmineau, E.; Yen, T.G.; Lin, W.M.; Grigoropoulos, G.; Stern, F. CFD, potential flow and system-based simulations of fully appended free running 5415M in calm water and waves. Int. Shipbuild. Prog. 2018, 65, 227–256. [Google Scholar] [CrossRef]
- Niklas, K.; Karczewski, A. Determination of seakeeping performance for a case study vessel by the strip theory method. Pol. Marit. Res. 2020, 27, 4–16. [Google Scholar] [CrossRef]
- Simonsen, C.D.; Otzen, J.F.; Joncquez, S.; Stern, F. EFD and CFD for KCS heaving and pitching in regular head waves. J. Mar. Sci. Technol. 2013, 18, 435–459. [Google Scholar] [CrossRef]
- Im, N.; Lee, S. Effects of Forward Speed and Wave Height on the Seakeeping Performance of a Small Fishing Vessel. J. Mar. Sci. Eng. 2022, 10, 1936. [Google Scholar] [CrossRef]
- Ozturk, D.; Delen, C.; Mancini, S.; Serifoglu, M.O.; Hizarci, T. Full-scale CFD analysis of double-m craft seakeeping performance in regular head waves. J. Mar. Sci. Eng. 2021, 9, 504. [Google Scholar] [CrossRef]
- Fitriadhy, A.; Dewa, S.; Mansor, N.A.; Adam, N.A.; Ng, C.Y.; Kang, H.S. CFD investigation into seakeeping performance of a training ship. CFD Lett. 2021, 13, 19–32. [Google Scholar] [CrossRef]
- Kim, Y.; Park, J.B.; Park, J.C.; Park, S.K.; Lee, W.M. Development of an evaluation procedure for seakeeping performance of high-speed planing hull using hybrid method. J. Soc. Nav. Archit. Korea 2019, 56, 200–210. [Google Scholar] [CrossRef]
- Nam, S.; Park, J.C.; Park, J.B.; Yoon, H.K. CFD-Modified Potential Simulation on Seakeeping Performance of a Barge. Water 2022, 14, 3271. [Google Scholar] [CrossRef]
- Faltinsen, O.M. Sea Loads on Ships and Offshore Structures; Cambridge University Press: London, UK, 1990; p. 328. ISBN 0-521-45870-6. [Google Scholar]
- Sariöz, K.; Narli, E. Effect of criteria on seakeeping performance assessment. Ocean Eng. 2005, 32, 1161–1173. [Google Scholar] [CrossRef]
- Korea Maritime Safety Tribunal. Statistics of Marine Accident. 2020. Available online: https://www.kmst.go.kr/eng/com/selectHtmlPage.do?htmlName=m4_vesseltype (accessed on 1 December 2021).
- Suh, K.D.; Kwon, H.D.; Lee, D.Y. Statistical characteristics of deepwater waves along the Korean Coast. J. Korean Soc. Coast. Ocean Eng. 2008, 20, 342–354. [Google Scholar]
- Bouws, E.; Günther, H.; Rosenthal, W.; Vincent, C.L. Similarity of the wind wave spectrum in finite depth water: 1. Spectral form. J. Geophys. Res. Ocean. 1985, 90, 975–986. [Google Scholar] [CrossRef]
- Kitaigordskii, S.A.; Krasitskii, V.P.; Zaslavskii, M.M. On Phillips’ theory of equilibrium range in the spectra of wind-generated gravity waves. J. Phys. Oceanogr. 1975, 5, 410–420. [Google Scholar] [CrossRef]
- Goda, Y. Random seas and design of maritime structures. Adv. Ser. Ocean Eng. 2000, 15, 25–30. [Google Scholar]
- Thompson, E.F.; Vincent, C.L. Prediction of Wave Height in Shallow Water. In Proceedings of the Specialty Conference on the Design, Construction, Maintenance, and Performance of Coastal Structures—Coastal Structures ’83, Arlington, TX, USA, 9–11 March 1983; pp. 1000–1008. [Google Scholar]
- Det Norske Veritas. Offshore Standard DNV-OS-E301 Position Mooring; Det Norske Veritas: Bærum, Norway, 2010. [Google Scholar]
- Lloyd’s Register. WAVELOAD-FD User Manual, Version 1.1 for User of ShipRight and ShipRight-FOI; Lloyd’s Register: Southampton, UK, 2015. [Google Scholar]
- ABS (American Bureau of Shipping). Guidance Notes on ‘Dynamic Load Approach’ and Direct Analysis for High Speed Craft; ABS (American Bureau of Shipping): Houston, TX, USA, 2003. [Google Scholar]
- Zaidi, H.; Fohanno, S.; Taiar, R.; Polidori, G. Turbulence model choice for the calculation of drag forces when using the CFD method. J. Biomech. 2010, 43, 405–411. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.I.; Park, I.R.; Suh, S.B.; Kang, Y.D.; Hong, S.Y.; Nam, B.W. Motion Simulation of FPSO in Waves through Numerical Sensitivity Analysis. J. Ocean Eng. Technol. 2018, 32, 166–176. [Google Scholar] [CrossRef]
- Jiao, J.; Huang, S. CFD simulation of ship seakeeping performance and slamming loads in bidirectional cross wave. J. Mar. Sci. Eng. 2020, 8, 312. [Google Scholar] [CrossRef]
- Jung, D.; Kim, S. Computational Investigation of Seakeeping Performance of a Surfaced Submarine in Regular Waves. J. Ocean. Eng. Technol. 2022, 36, 303–312. [Google Scholar] [CrossRef]
- Roache, P.J. Perspective: A method for uniform reporting of grid refinement studies. J. Fluids Eng. 1994, 116, 405–413. [Google Scholar] [CrossRef]
- Roache, P.J. Quantification of uncertainty in computational fluid dynamics. Annu. Rev. Fluid Mech. 1997, 29, 123–160. [Google Scholar] [CrossRef]
- NORDFORSK. Assessment of Ship Performance in a Seaway, Nordic Cooperative Project: Seakeeping Performance of Ships; NORDFORSK: Copenhagen, Denmark, 1987; p. 32. [Google Scholar]
- NATO (North Atlantic Treaty Organization). Common Procedures for Seakeeping in the Ship Design Process, 3rd ed.; STANAG 4154; NATO (North Atlantic Treaty Organization): Washington, DC, USA, 2000. [Google Scholar]
- Youn, D.; Choi, L.; Kim, J. Motion Response Characteristics of Small Fishing Vessels of Different Sizes among Regular Waves. J. Ocean Eng. Technol. 2023, 37, 1–7. [Google Scholar] [CrossRef]
- ITTC. Recommended Procedures and Guidelines. Seakeeping Experiments. In Proceedings of the 27th ITTC Seakeeping Committee, Copenhagen, Denmark, 1–5 September 2014; pp. 1–22. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Principal Dimension | Full-Scale |
|---|---|
| Length between perpendicular, Lpp (m) | 39.2 |
| Breadth, B (m) | 13.0 |
| Depth, D (m) | 3.3 |
| Draft, T (m) | 1.5 |
| Displacement weight, W (kgf) | 735,000 |
| Longitudinal center of gravity, LCG from AP (m) | 19.6 |
| Vertical center of gravity, VCG from BL (m) | 2.7 |
| Moment of inertia, Ixx (kg·m2) | 9,055,273 |
| Moment of inertia, Iyy and Izz (kg·m2) | 70,589,400 |
| Speed, U (m·s−1) | 3.0 |
| Sea State Code | Hs (m) | Tz (s) |
|---|---|---|
| Sea State 2 | 0.5 | 3.5 |
| Sea State 3 | 1.0 | 4.0 |
| Sea State 4 | 1.3 | 4.5 |
| Boundary | Condition Setting |
|---|---|
| Inlet, Top, Bottom | Velocity inlet |
| Outlet, Side | Pressure outlet |
| Overset region | Overset |
| Grid Case | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| Grid Base Size | 0.35 | 0.27 | 0.20 | 0.15 | 0.11 |
| No. of Mesh | 1,000,000 | 1,600,000 | 3,200,000 | 6,600,000 | 14,000,000 |
| RAO | 10.37 | 9.97 | 9.65 | 9.52 | 9.51 |
| Motion Response | Reference Location | Units | Criterion |
|---|---|---|---|
| Roll | COG | SSA (deg) | 8.0 |
| Pitch | COG | SSA (deg) | 3.0 |
| Evaluation Items (Wave Direction) | Analysis Method | Sea State 2 Relative Error (%) | Sea State 3 Relative Error (%) | Sea State 4 Relative Error (%) |
|---|---|---|---|---|
| Roll (90°) | Potential | 80 | 59 | 68 |
| CMP | 15 | 6 | 1 | |
| Pitch (180°) | Potential | 27 | 22 | 37 |
| CMP | 10 | 12 | 13 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nam, S.; Park, J.-C.; Park, J.-B.; Yoon, H.K. Numerical Simulation of Seakeeping Performance of a Barge Using Computational Fluid Dynamics (CFD)-Modified Potential (CMP) Model. J. Mar. Sci. Eng. 2024, 12, 369. https://doi.org/10.3390/jmse12030369
Nam S, Park J-C, Park J-B, Yoon HK. Numerical Simulation of Seakeeping Performance of a Barge Using Computational Fluid Dynamics (CFD)-Modified Potential (CMP) Model. Journal of Marine Science and Engineering. 2024; 12(3):369. https://doi.org/10.3390/jmse12030369
Chicago/Turabian StyleNam, Seol, Jong-Chun Park, Jun-Bum Park, and Hyeon Kyu Yoon. 2024. "Numerical Simulation of Seakeeping Performance of a Barge Using Computational Fluid Dynamics (CFD)-Modified Potential (CMP) Model" Journal of Marine Science and Engineering 12, no. 3: 369. https://doi.org/10.3390/jmse12030369