
Application of Regularized Meshless Method with Error Estimation Technique for Water–Wave Scattering by Multiple Cylinders



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Problem Statement
Water Wave Problem
3. Numerical Method
3.1. Meshless Formulation Using Radial Basis Functions (RBFs)
3.2. Derivation of Diagonal Coefficients of Influence Matrices for an Arbitrary Domain Using the Regularization Meshless Method (RMM)
3.2.1. Interior Problem
3.2.2. Exterior Problem
3.3. Error Estimation Technique
3.3.1. Producing the Exact Solution for the Auxiliary Problem
- In the auxiliary problem, the boundary conditions at the positions of the number of collocation points on the boundary are specified with the same values as in the original problem. The undetermined coefficient, , can be determined by matching these boundary conditions at those positions. It is noted that where M is the total number of terms of the Trefftz bases, . Therefore, the approximate solution of the auxiliary problem closely resembles the exact solution of the original problem. Each function of the complementary solution set satisfies the governing equation, given by:
3.3.2. Error Analysis for the Auxiliary Problem
3.3.3. Solving the Original Problem Using the RMM
4. Illustrative Examples and Discussions
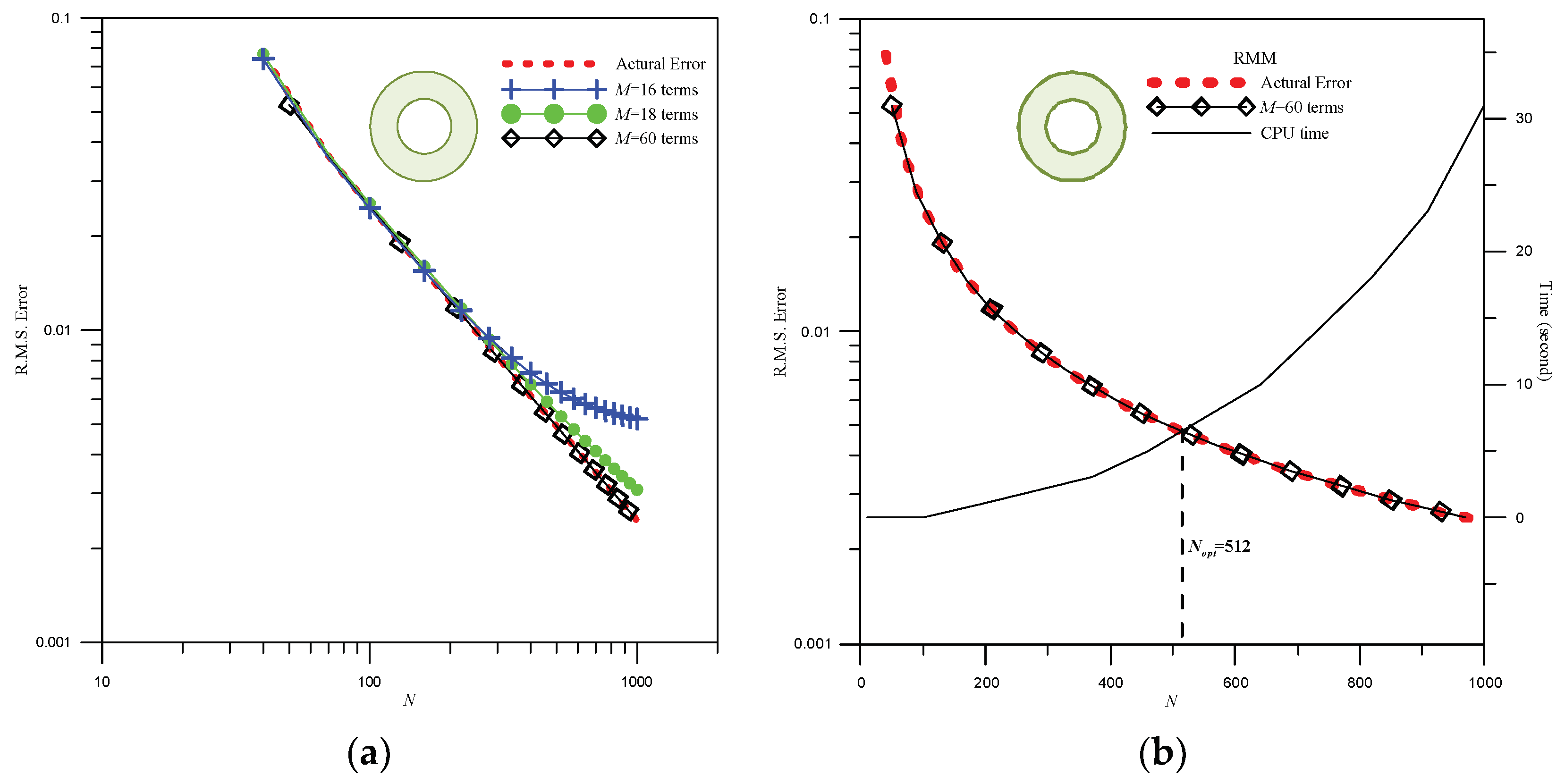
- Case 1: Concentric circles’ domain subjected to Dirichlet B.C.
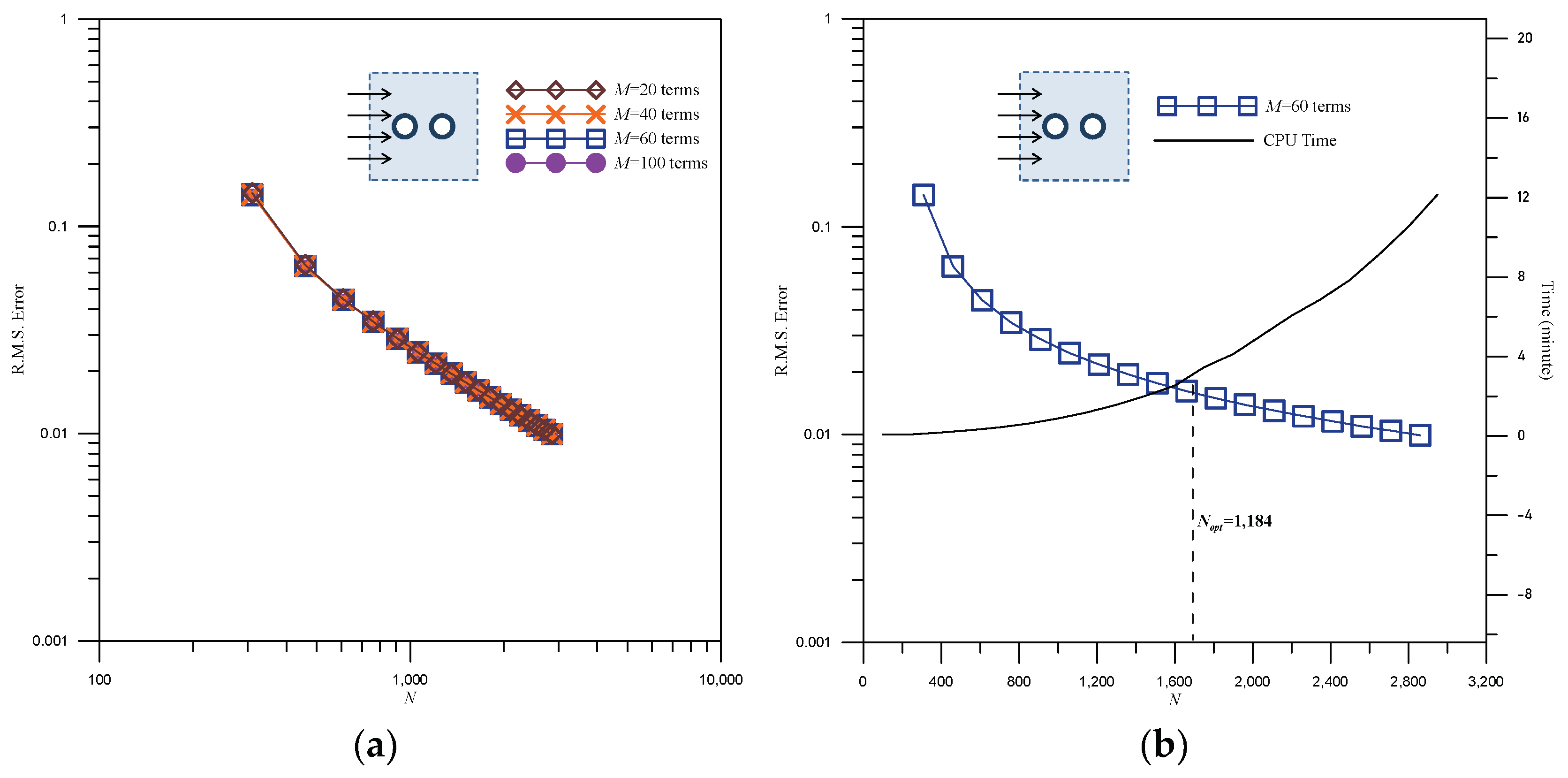
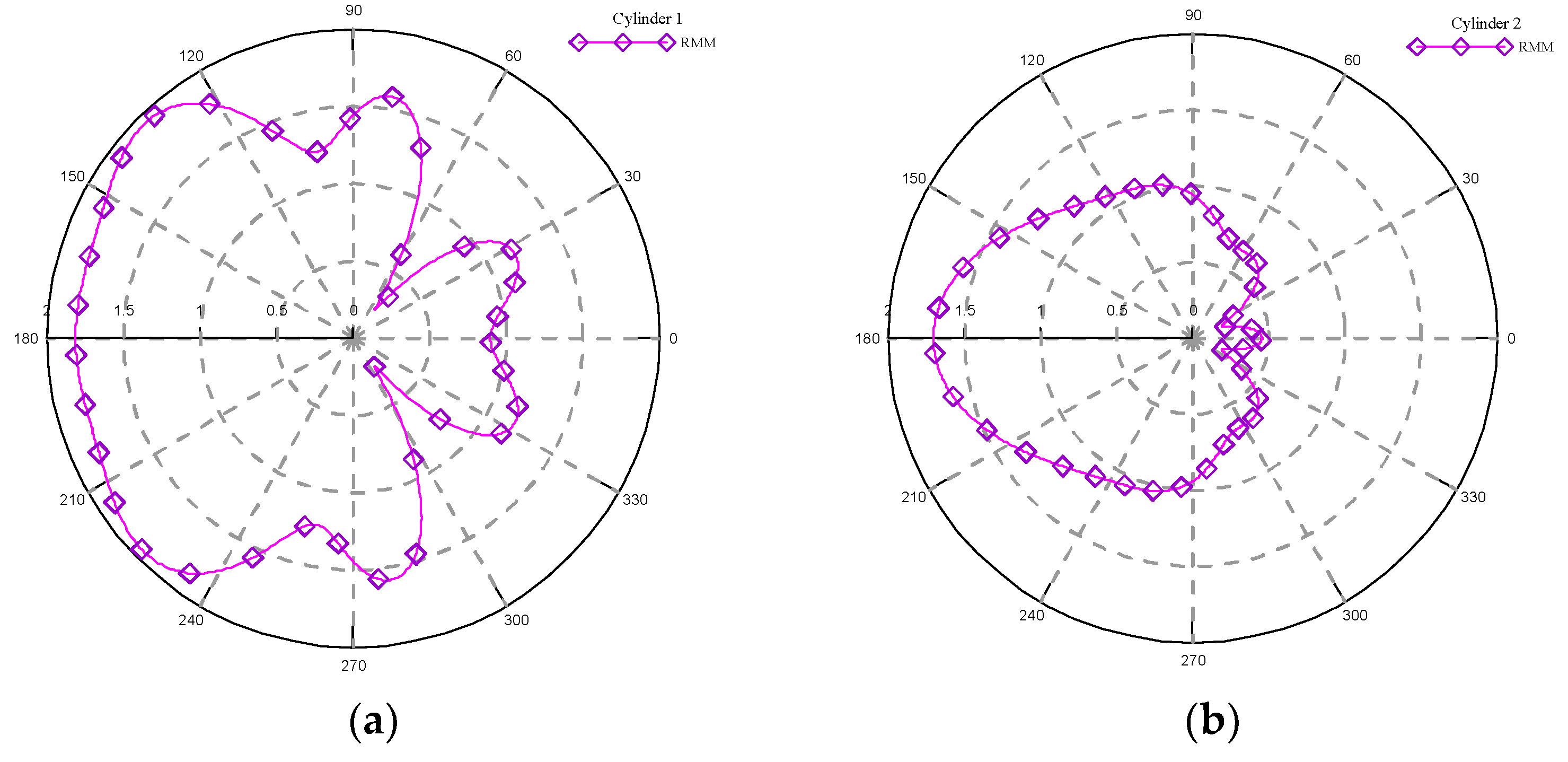
- Case 2: Water wave past two vertical cylinders
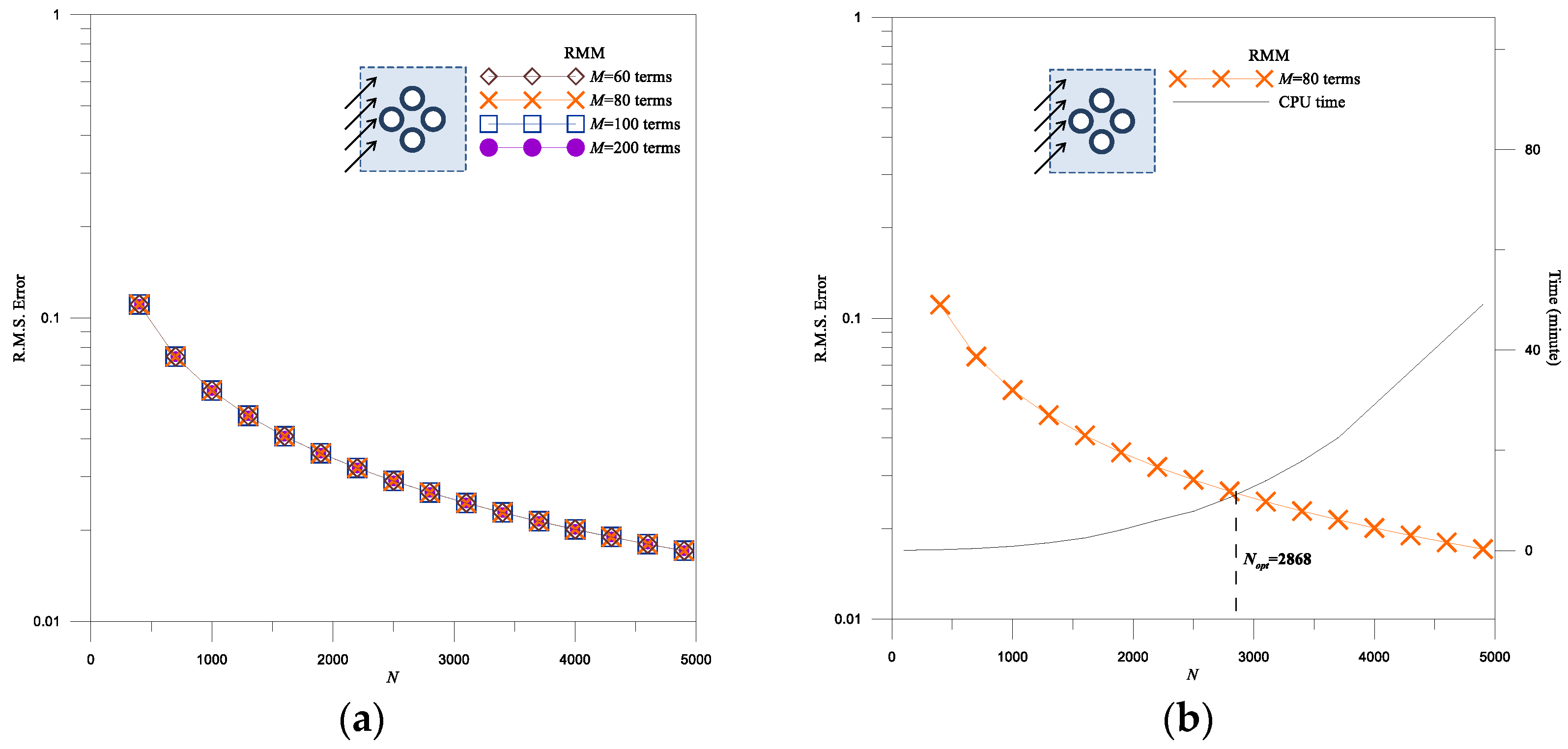
- Case 3: Water wave past four vertical cylinders
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, J.T.; Kao, J.H.; Huang, Y.L.; Kao, S.K. Applications of degenerate kernels to potential flow across circular, elliptical cylinders and a thin airfoil. Eur. J. Mech. B Fluids 2021, 90, 29–48. [Google Scholar] [CrossRef]
- Chen, J.T.; Chou, Y.T.; Kao, J.H.; Lee, J.W. Analytical solution for potential flow across two circular cylinders using the BIE in conjunction with degenerate kernels of bipolar coordinates. Appl. Math. Lett. 2022, 132, 108137. [Google Scholar] [CrossRef]
- Huang, J.; Fan, C.-M.; Chen, J.-H.; Yan, J. Meshless generalized finite difference method for the propagation of nonlinear water waves under complex wave conditions. Mathematics 2022, 10, 1007. [Google Scholar] [CrossRef]
- Naeem, M.; Yasmin, H.; Shah, R.; Shah, N.A.; Nonlaopon, K. Investigation of fractional nonlinear regularized long-wave models via novel techniques. Symmetry 2023, 15, 220. [Google Scholar] [CrossRef]
- Chen, K.H.; Hsu, Y.H.; Kao, J.H. Application of the error estimation technique in the method of fundamental solutions for solving incident wave problem with multiple cylinders. Ocean Eng. 2023, 280, 114608. [Google Scholar] [CrossRef]
- Singh, R.S. Estimation of error variance in linear regression models with errors having multivariate student-t distribution with unknown degrees of freedom. Econ. Lett. 1988, 27, 47–53. [Google Scholar] [CrossRef]
- Liu, X.; Zheng, S.; Feng, X. Estimation of error variance via ridge regression. Biometrika 2020, 107, 481–488. [Google Scholar] [CrossRef]
- Wang, X.; Kong, L.; Wang, L. Estimation of error variance in regularized regression models via adaptive lasso. Mathematics 2022, 10, 1937. [Google Scholar] [CrossRef]
- Guo, Y.; Jacob, B. Estimating the error variance in a high-dimensional linear model. Biometrika 2019, 106, 533–546. [Google Scholar] [CrossRef]
- Guha Majumdar, S.; Rai, A.; Mishra, D.C. Estimation of error variance in genomic selection for ultrahigh dimensional data. Agriculture 2023, 13, 826. [Google Scholar] [CrossRef]
- Hon, Y.C.; Chen, W. Boundary knot method for 2D and 3D Helmholtz and the convection-diffusion problems with complicated geometry. Int. J. Numer. Methods Eng. 2003, 56, 1931–1948. [Google Scholar] [CrossRef]
- Chen, W.; Hon, Y.C. Numerical investigation on convergence of boundary knot method in the analysis of homogeneous Helmholtz, modified Helmholtz, and convection–diffusion problems. Comput. Methods Appl. Mech. Eng. 2003, 192, 1859–1875. [Google Scholar] [CrossRef]
- Chen, W.; Tanaka, M. A meshfree integration-free and boundary-only RBF technique. Comput. Math. Appl. 2002, 43, 379–391. [Google Scholar] [CrossRef]
- Jin, B.; Chen, W. Boundary knot method based on geodesic distance for anisotropic problems. J. Comput. Phys. 2006, 215, 614–629. [Google Scholar] [CrossRef]
- Chen, W. Meshfree boundary particle method applied to Helmholtz problems. Eng. Anal. Bound. Elem. 2002, 26, 577–581. [Google Scholar] [CrossRef]
- Chen, J.T.; Kao, S.K.; Lee, W.M.; Lee, Y.T. Eigensolutions of the Helmholtz equation for a multiply connected domain with circular boundaries using the multipole Trefftz method. Eng. Anal. Bound. Elem. 2009, 34, 463–470. [Google Scholar] [CrossRef]
- Kupradze, V.D.; Aleksidze, M.A. The method of functional equations for the approximate solution of certain boundary value problems. USSR Comput. Math. Math. Phys. 1964, 4, 199–205. [Google Scholar] [CrossRef]
- Fairweather, G.; Karageorghis, A. The method of fundamental solutions for elliptic boundary value problems. Adv. Comput. Math. 1998, 9, 69–95. [Google Scholar] [CrossRef]
- Cheng, A.H.D.; Young, D.L.; Tsai, C.C. The solution of Poisson’s equation by iterative DRBEM using compactly supported, positive definite radial basis function. Eng. Anal. Bound. Elem. 2000, 24, 549–557. [Google Scholar] [CrossRef]
- Poullikkas, A.; Karageorghis, A.; Georgiou, G. Methods of fundamental solutions for harmonic and biharmonic boundary value problems. Comput. Mech. 1998, 21, 416–423. [Google Scholar] [CrossRef]
- Young, D.L.; Chen, K.H.; Lee, C.W. Novel meshless method for solving the potential problems with arbitrary domain. J. Comput. Phys. 2005, 209, 290–321. [Google Scholar] [CrossRef]
- Hwang, W.S.; Hung, L.P.; Ko, C.H. Non-singular boundary integral formulations for plane interior potential problems. Int. J. Numer. Methods Eng. 2002, 53, 1751–1762. [Google Scholar] [CrossRef]
- Tournour, M.A.; Atalla, N. Efficient evaluation of the acoustic radiation using multipole expansion. Int. J. Numer. Methods Eng. 1999, 46, 825–837. [Google Scholar] [CrossRef]
- Chen, K.H.; Kao, J.H.; Chen, J.T. Regularized meshless method for antiplane piezoelectricity problems with multiple inclusions. Comput. Model. Eng. Sci. 2009, 9, 253–279. [Google Scholar]
- Evans, D.V.; Porter, R. Near-trapping of waves by circular arrays of vertical cylinders. Appl. Ocean Res. 1997, 19, 83–99. [Google Scholar] [CrossRef]
- Linton, C.M.; Evans, D.V. The interaction of waves with arrays of vertical circular cylinders. J. Fluid Mech. 1990, 215, 549–569. [Google Scholar] [CrossRef]
- Chen, J.P.; Huang, C.X.; Chen, K.H. Determination of spurious eigenvalues and multiplicities of true eigenvalues using the real-part dual BEM. Comput. Mech. 1999, 24, 41–51. [Google Scholar] [CrossRef]
- Chen, J.T.; Hong, K.H. Review of dual integral representations with emphasis on hypersingular integrals and divergent series. Trans. Amer. Soci. Mech. Eng. 1999, 52, 17–33. [Google Scholar]
- Young, D.L.; Chen, K.H.; Lee, C.W. Singular meshless method using double layer potentials for exterior acoustics. J. Acous. Soci. Amer. 2006, 119, 96–107. [Google Scholar] [CrossRef] [PubMed]
- Abramowitz, M.; Stegun, I.A. Handbook of Mathematical Functions with Formulation Graphs and Mathematical Tables; UNT Digital Library: New York, NY, USA, 1972. [Google Scholar]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, K.-H.; Kao, J.-H.; Hsu, Y.-H. Application of Regularized Meshless Method with Error Estimation Technique for Water–Wave Scattering by Multiple Cylinders. J. Mar. Sci. Eng. 2024, 12, 492. https://doi.org/10.3390/jmse12030492
Chen K-H, Kao J-H, Hsu Y-H. Application of Regularized Meshless Method with Error Estimation Technique for Water–Wave Scattering by Multiple Cylinders. Journal of Marine Science and Engineering. 2024; 12(3):492. https://doi.org/10.3390/jmse12030492
Chicago/Turabian StyleChen, Kue-Hong, Jeng-Hong Kao, and Yi-Hui Hsu. 2024. "Application of Regularized Meshless Method with Error Estimation Technique for Water–Wave Scattering by Multiple Cylinders" Journal of Marine Science and Engineering 12, no. 3: 492. https://doi.org/10.3390/jmse12030492
APA StyleChen, K.-H., Kao, J.-H., & Hsu, Y.-H. (2024). Application of Regularized Meshless Method with Error Estimation Technique for Water–Wave Scattering by Multiple Cylinders. Journal of Marine Science and Engineering, 12(3), 492. https://doi.org/10.3390/jmse12030492