
Catenary Mooring Length Control for Motion Mitigation of Semi-Submersible Floating Wind Turbines


Abstract
1. Introduction
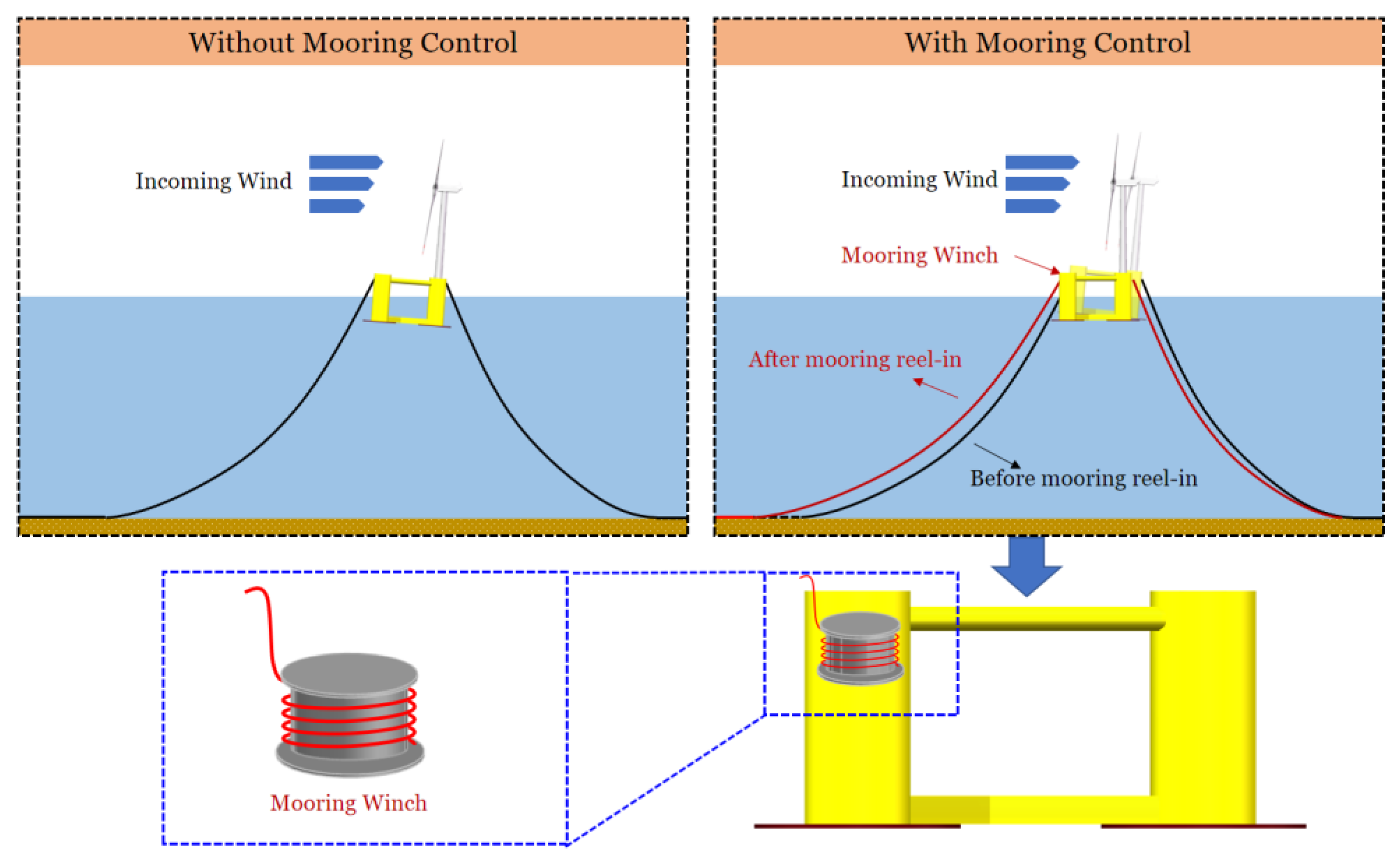
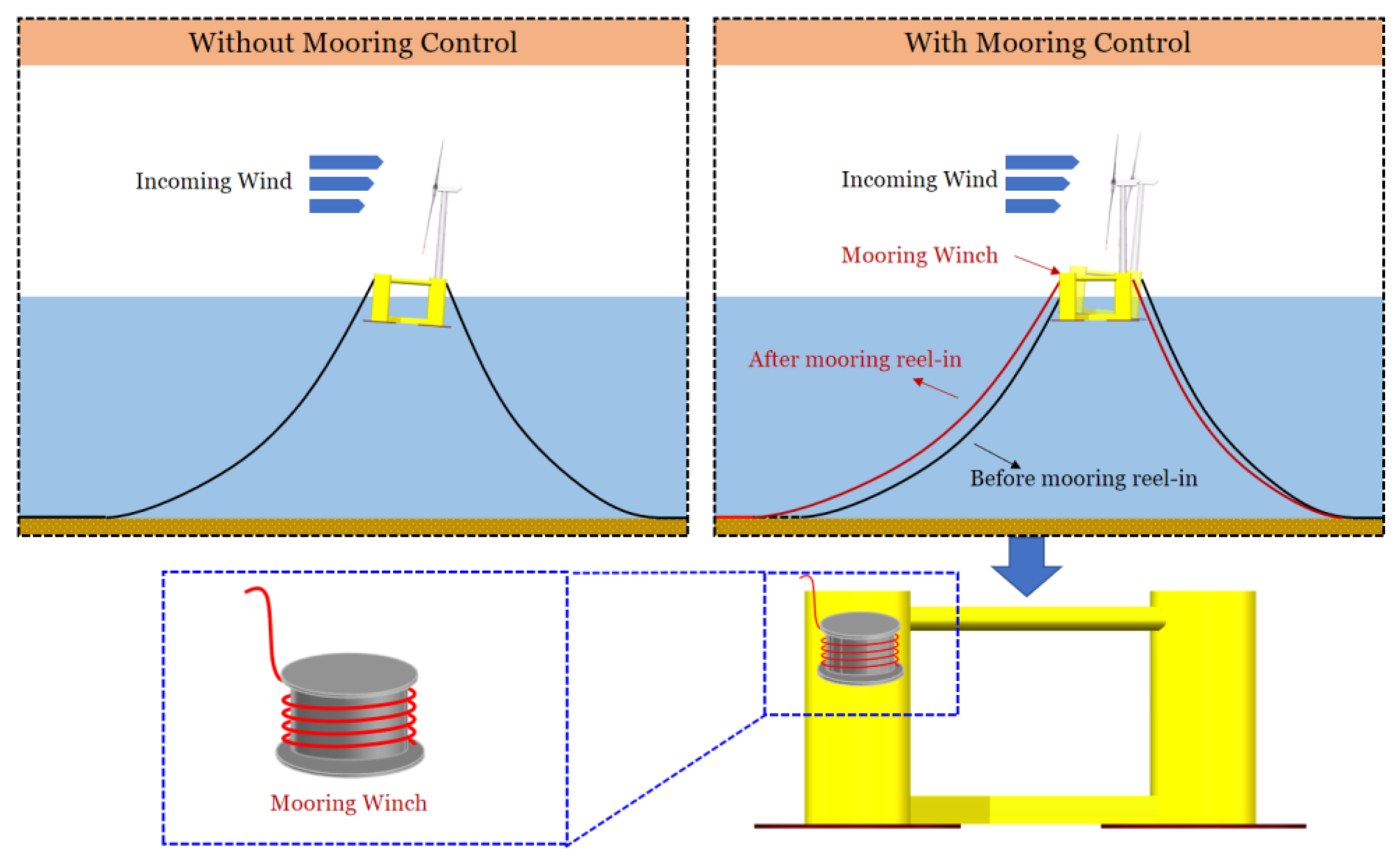
2. Catenary Mooring Length Re-Configuration Control Strategy for FOWTs
3. Numerical Simulations and Analysis
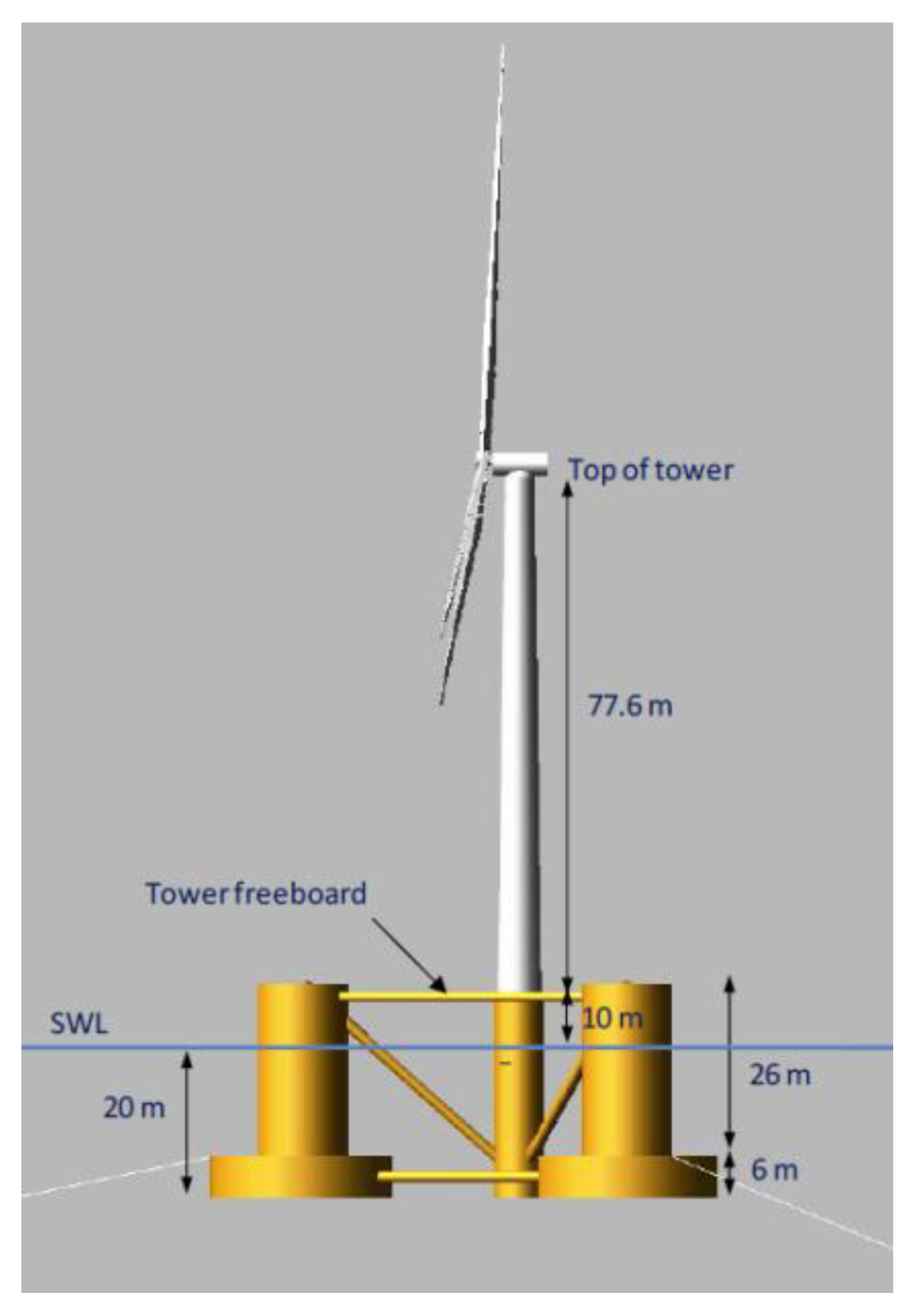
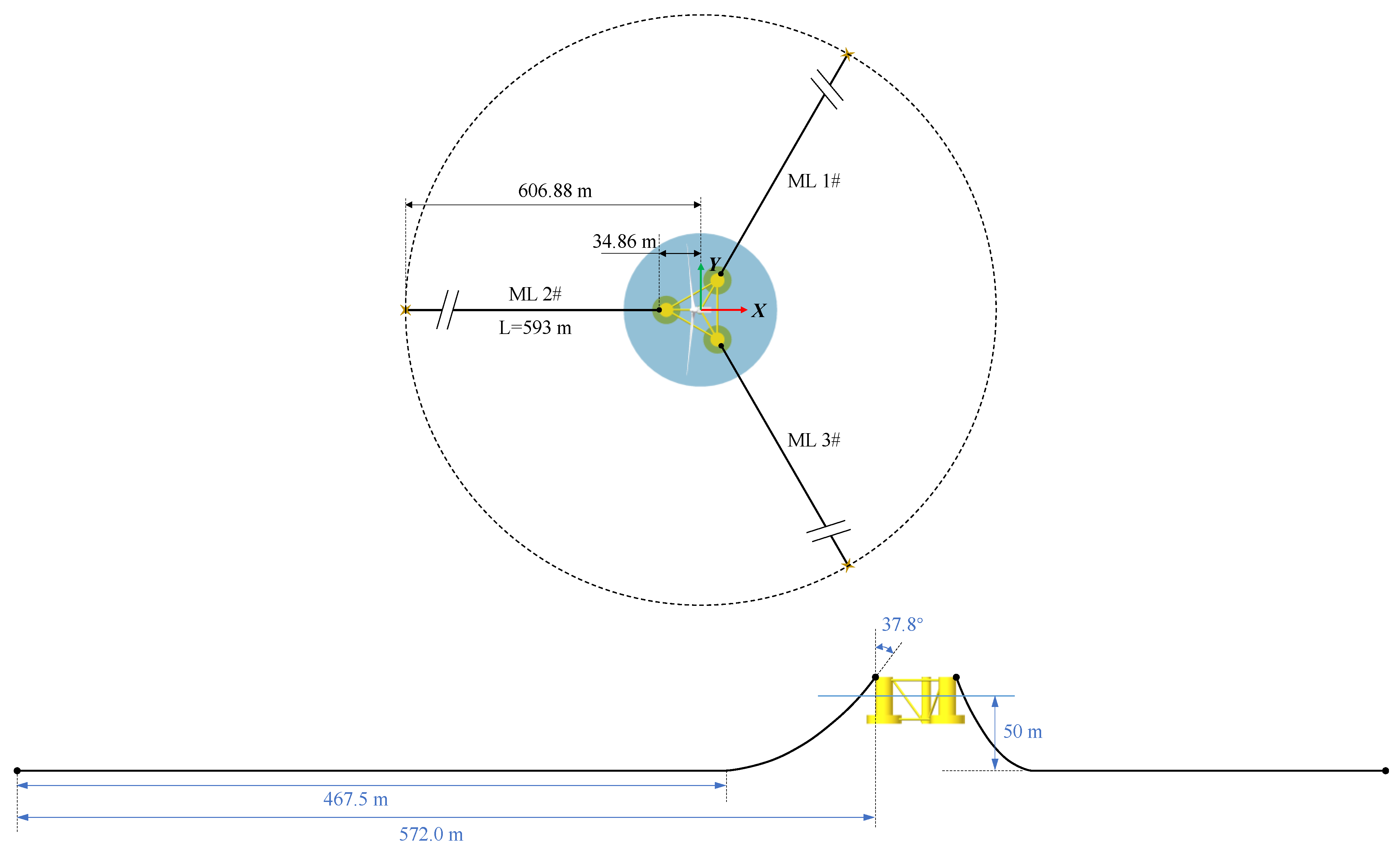
3.1. Semi-Submersible FOWT
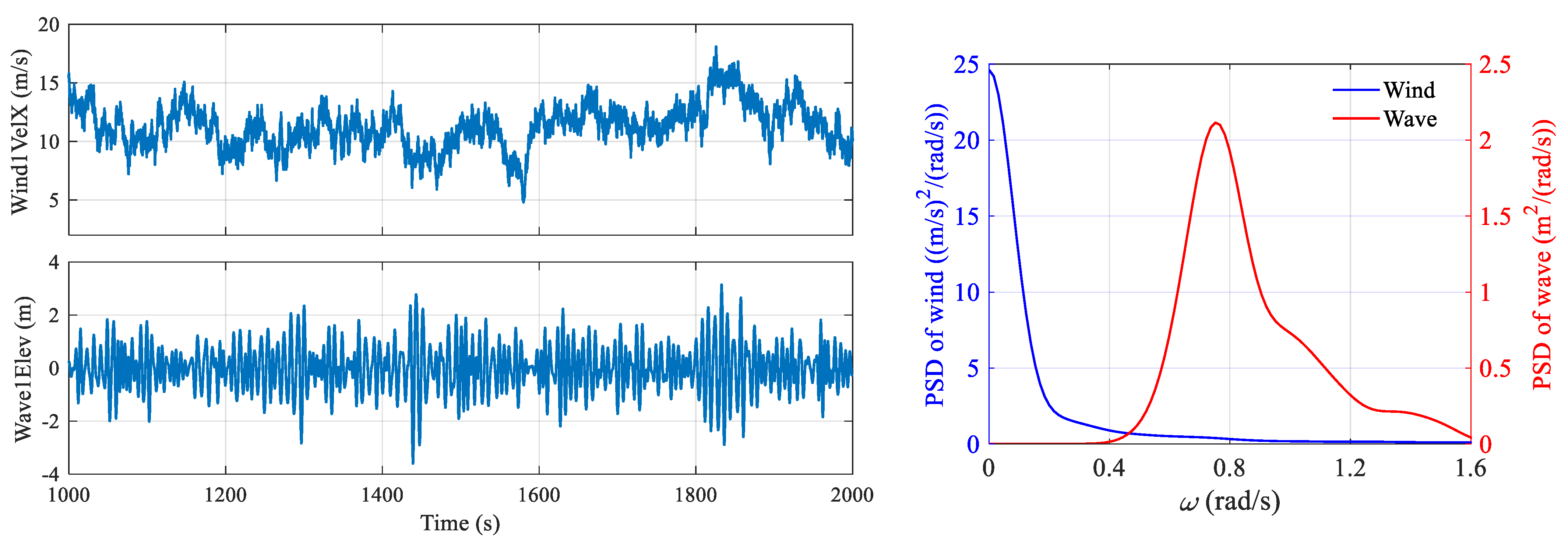
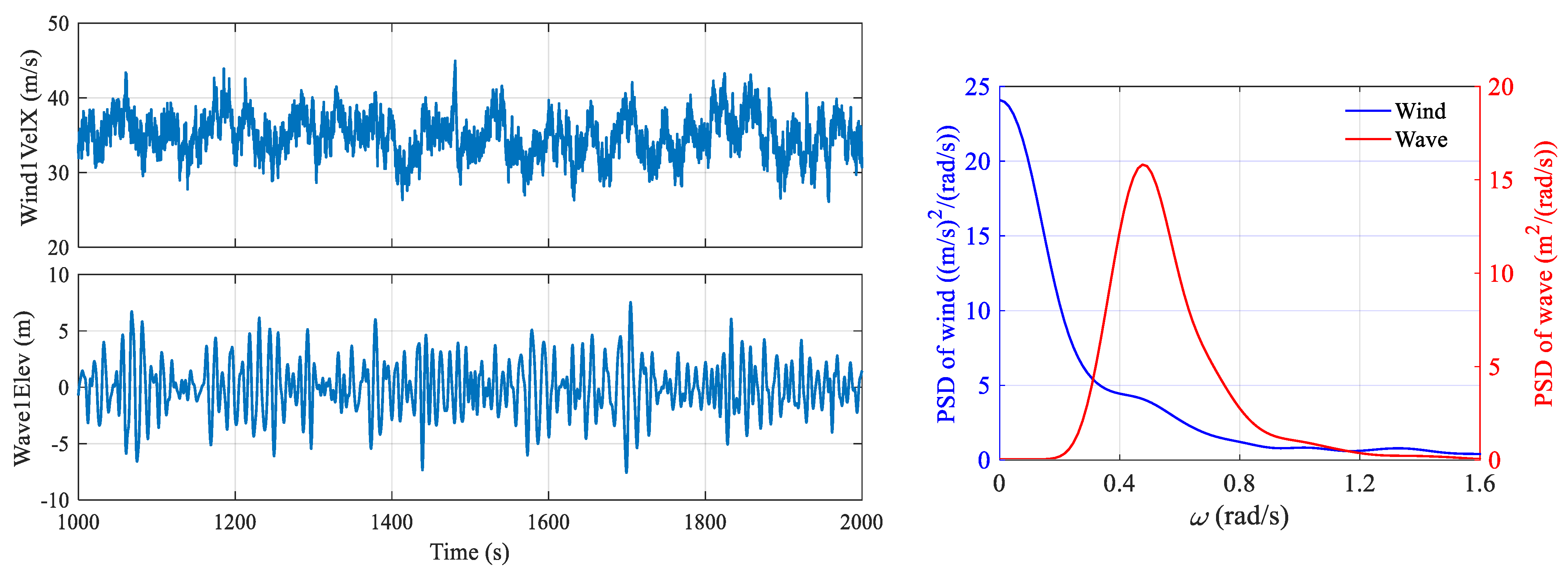
3.2. Environmental Conditions
3.3. Coupled Numerical Modelling Methodology
3.3.1. Multi-Body Dynamics
3.3.2. Aerodynamics
3.3.3. Hydrodynamics
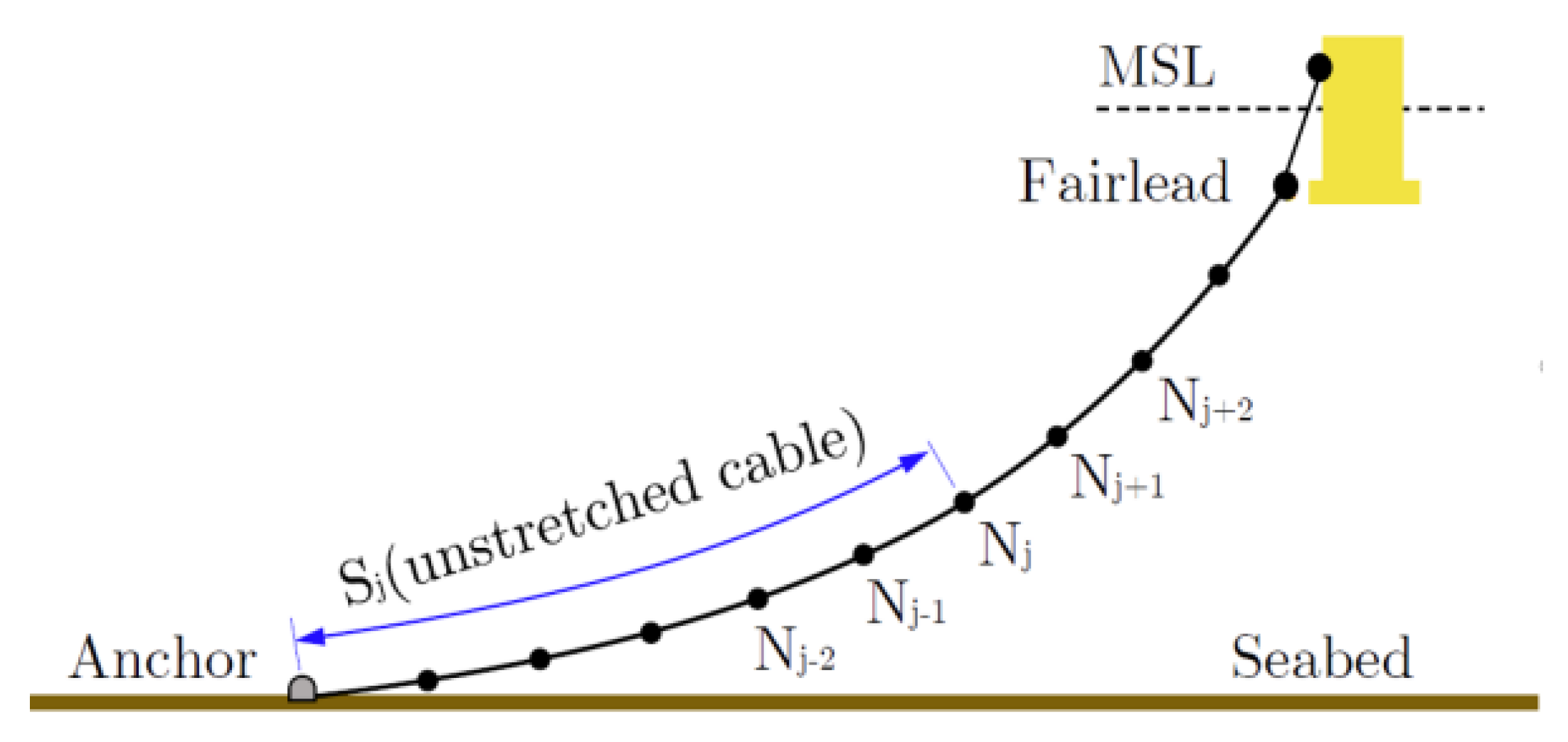
3.3.4. Mooring Dynamics
3.4. Numerical Simulation Results and Analysis
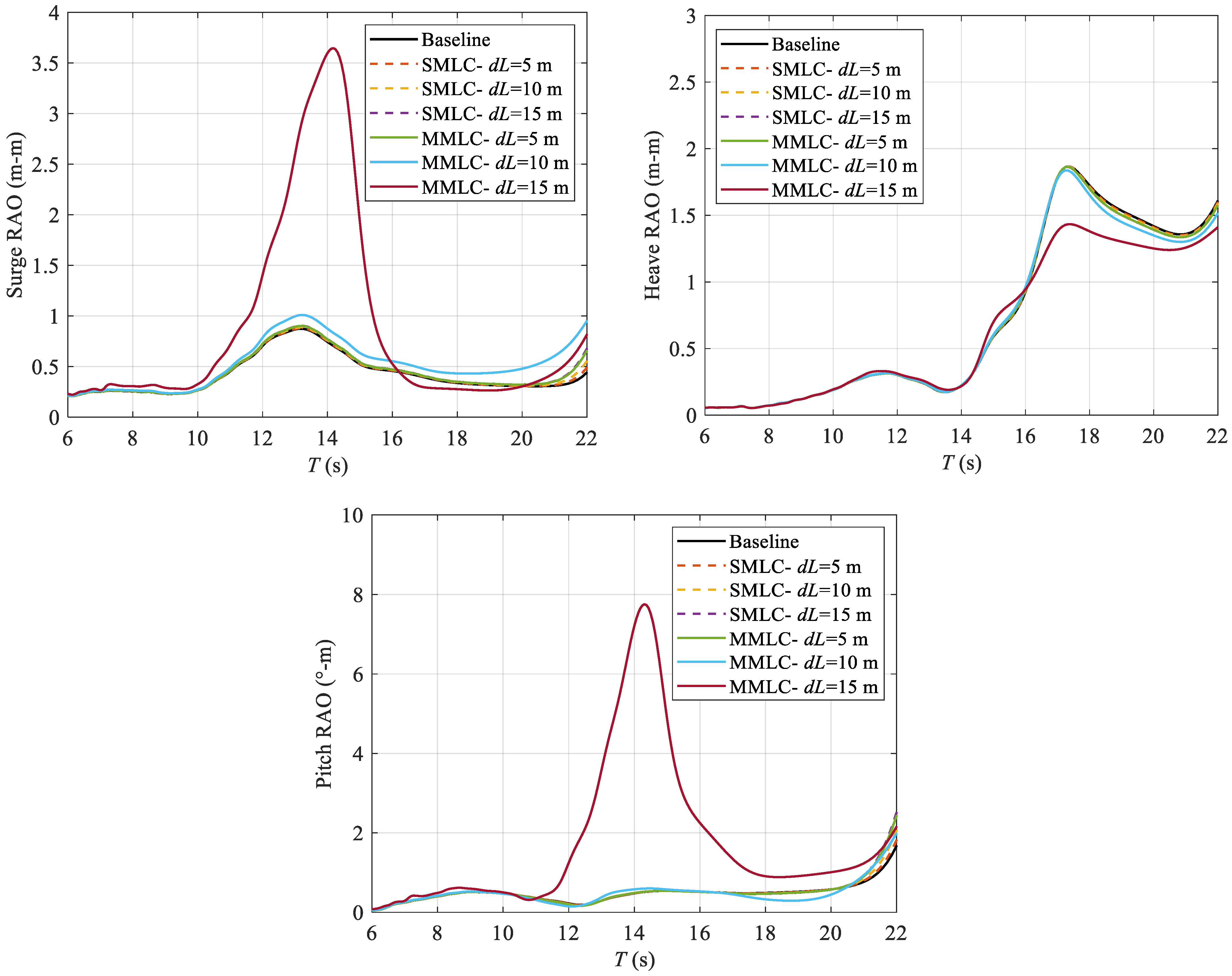
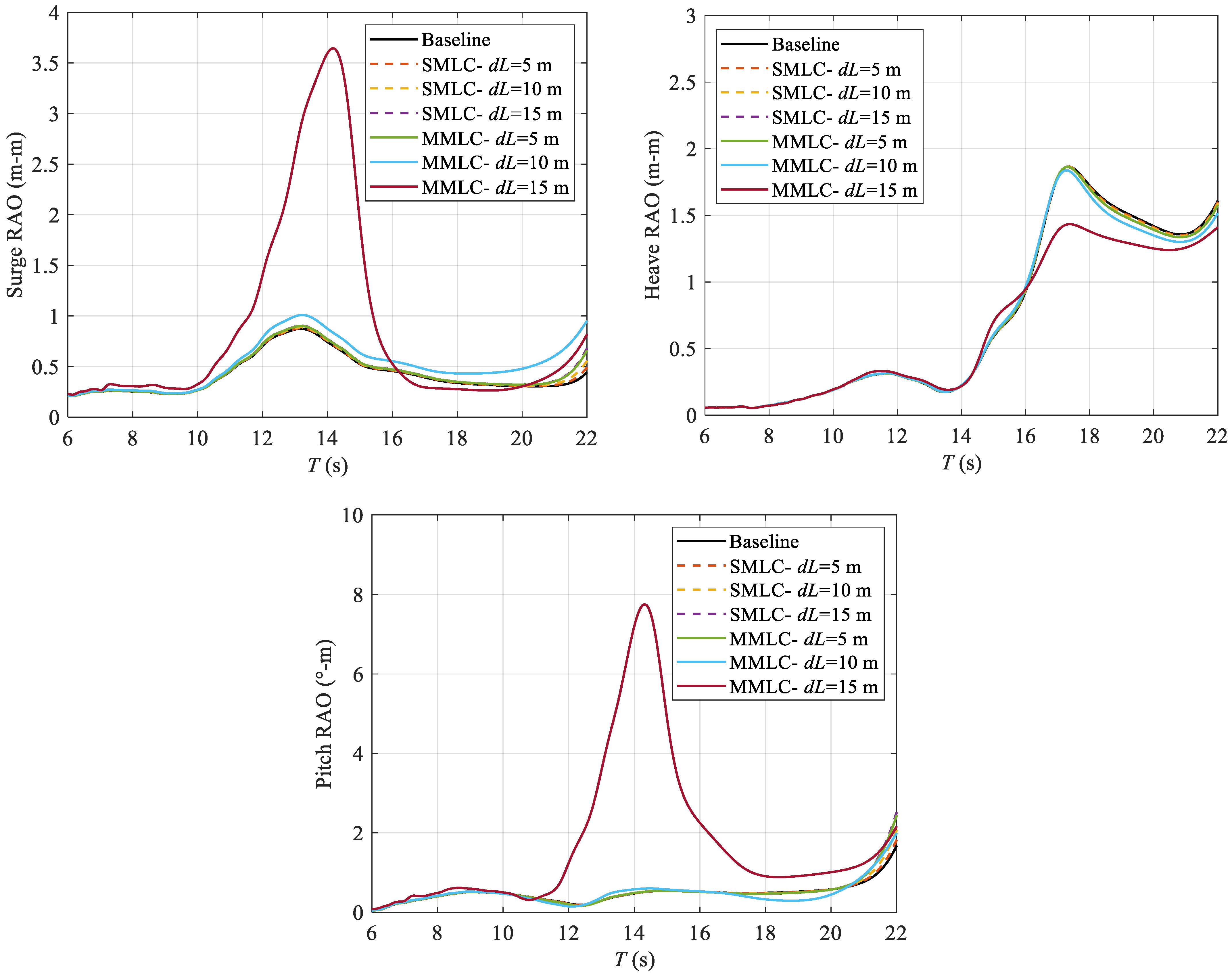
3.4.1. Response Amplitude Operator (RAO)
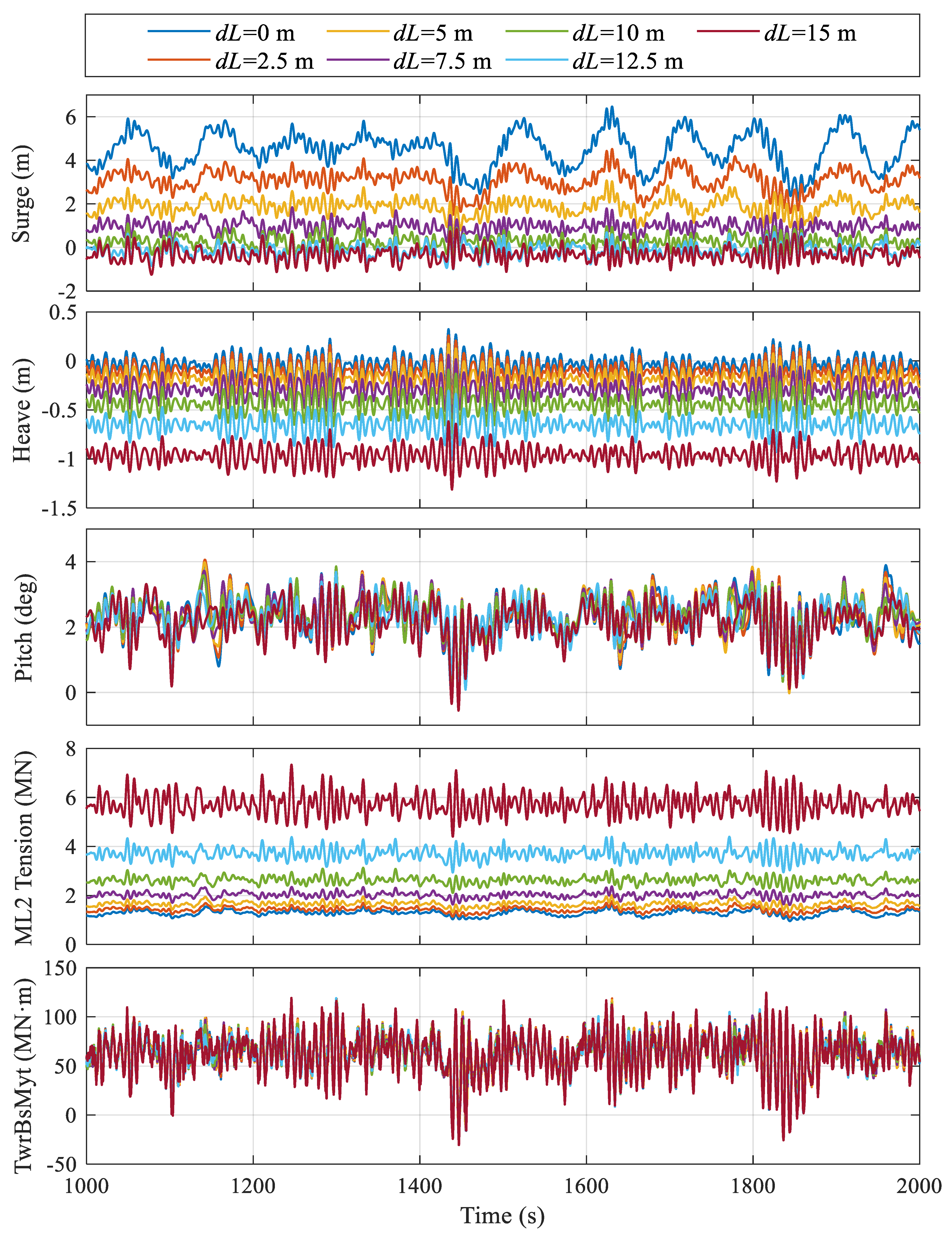
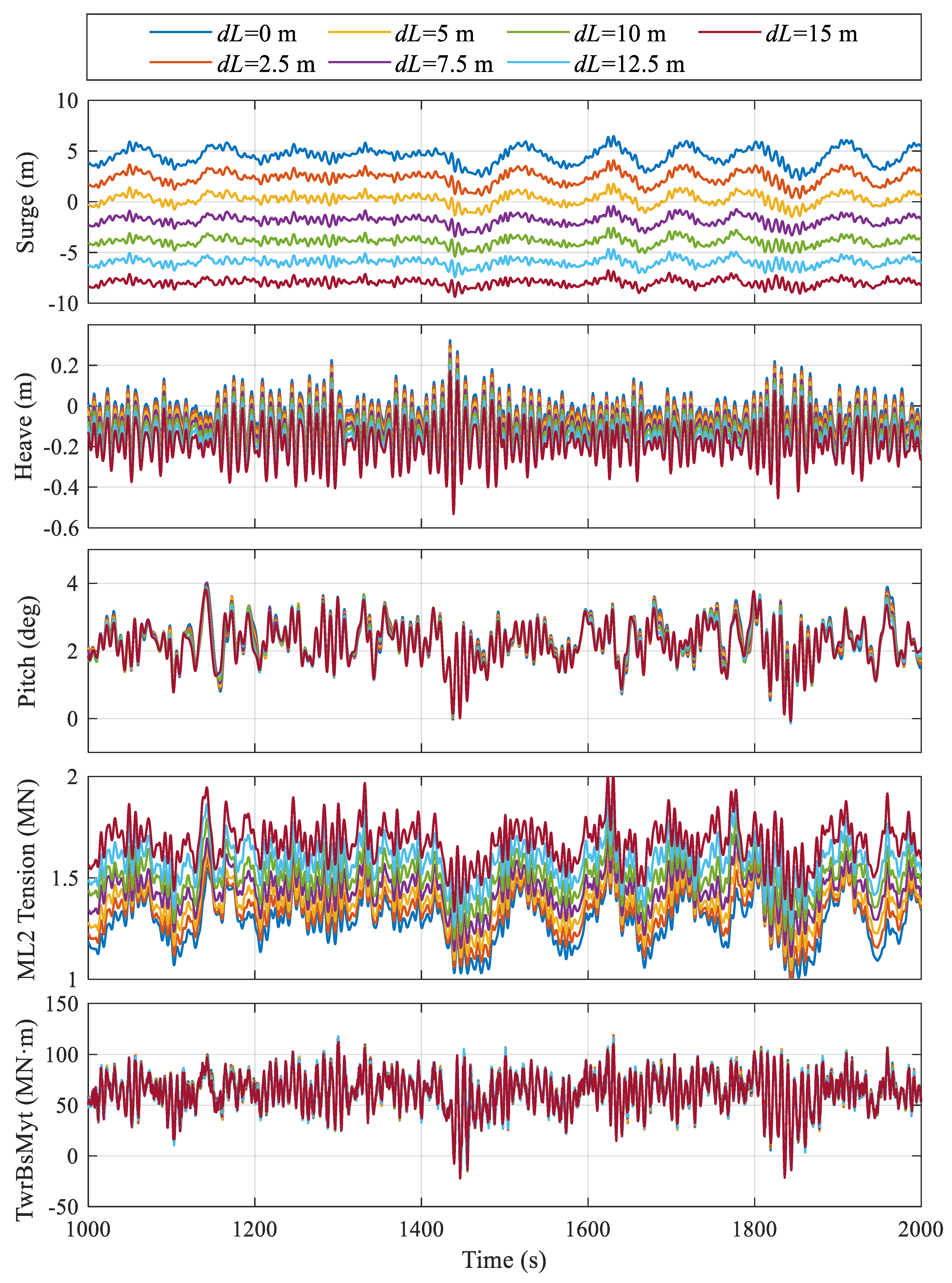
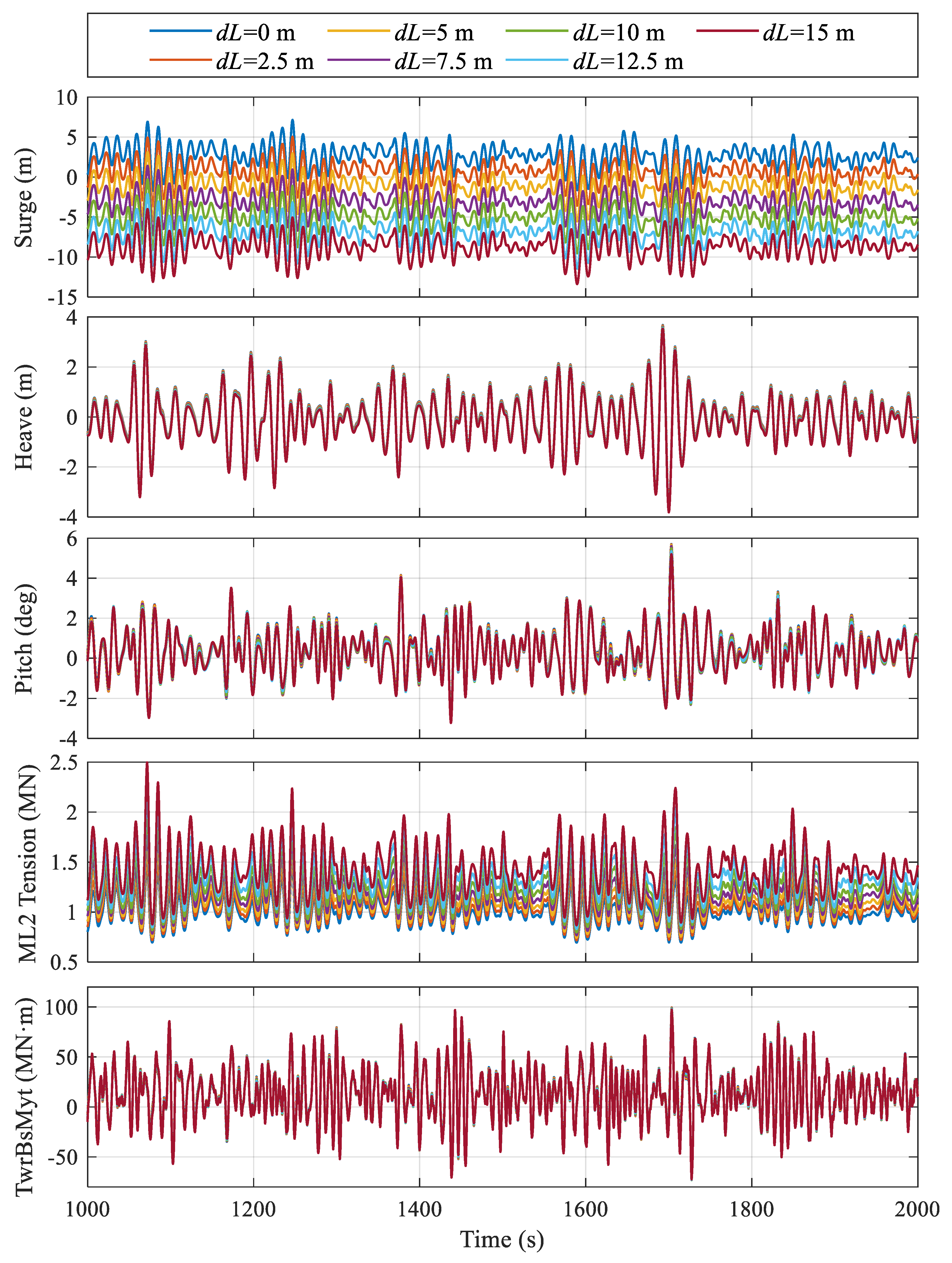
3.4.2. Rated Condition
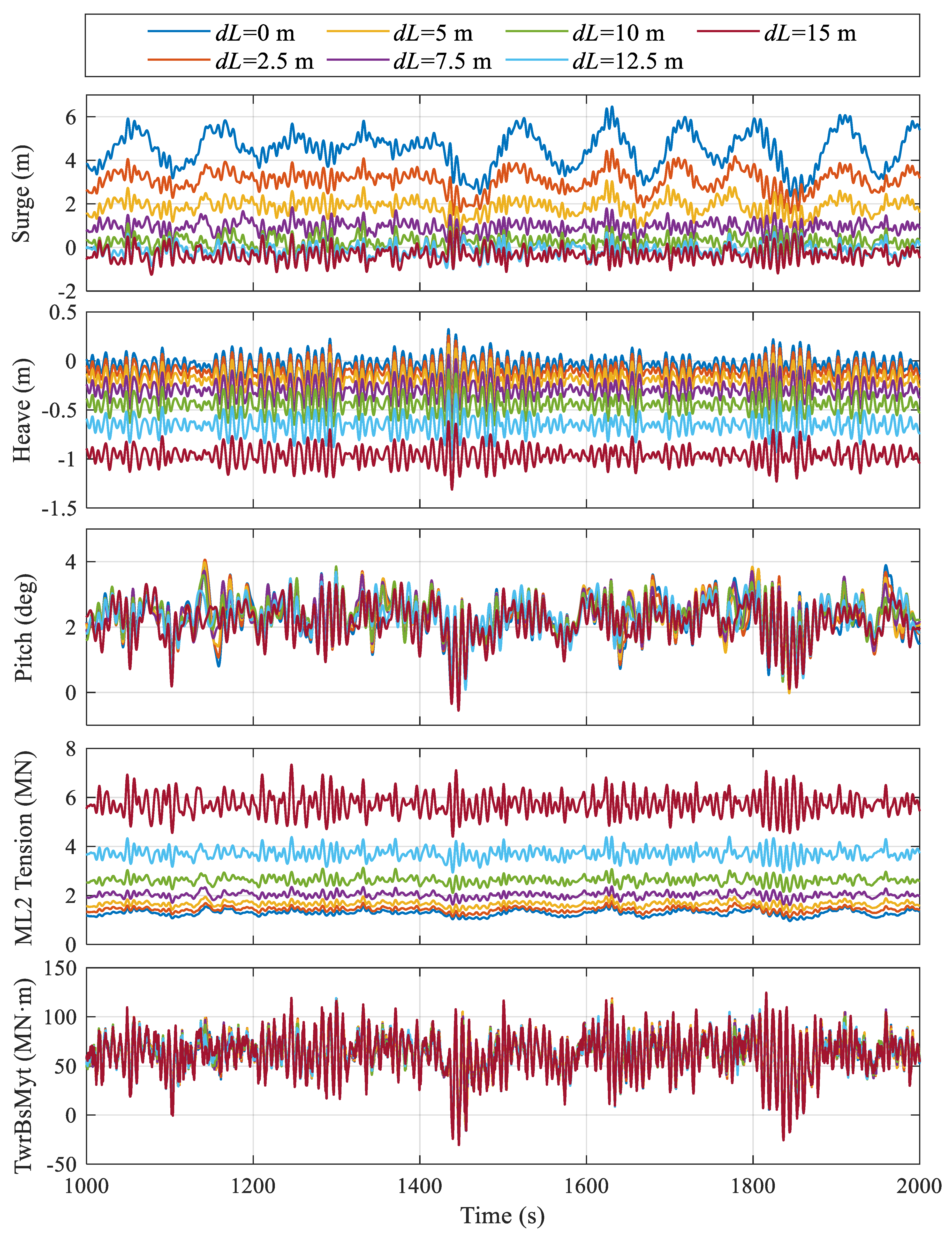
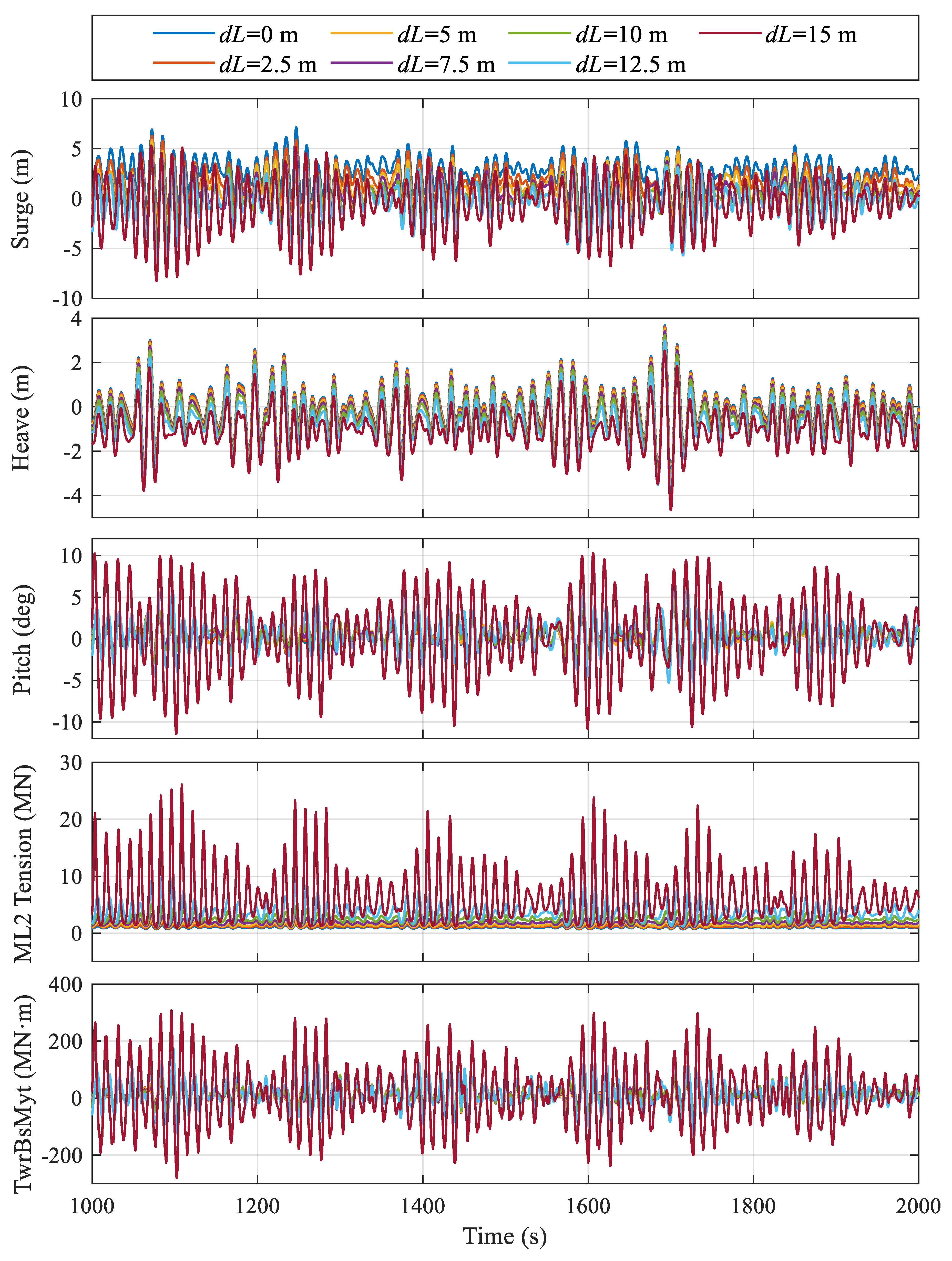
3.4.3. Parked Condition
4. Conclusions
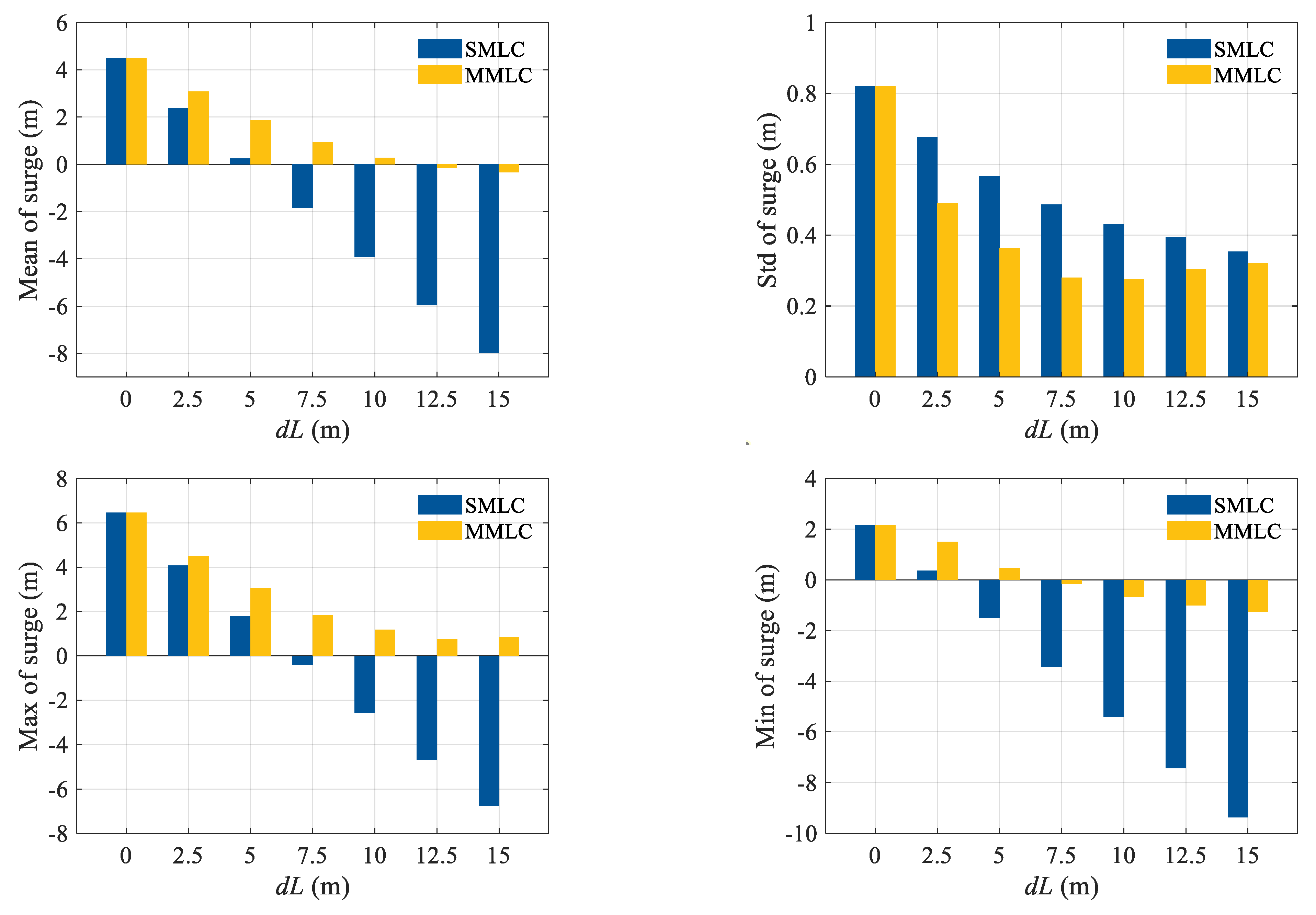
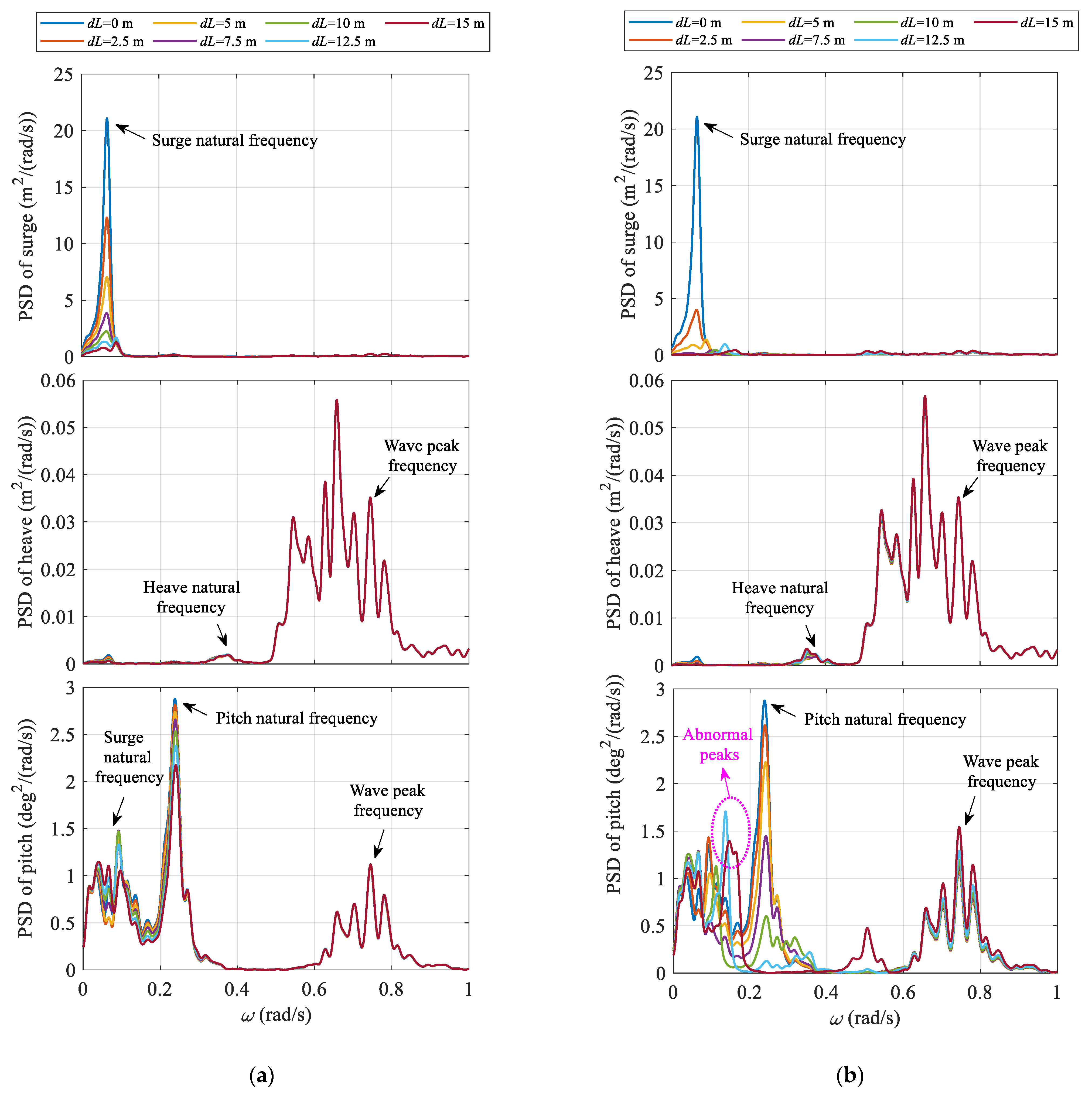
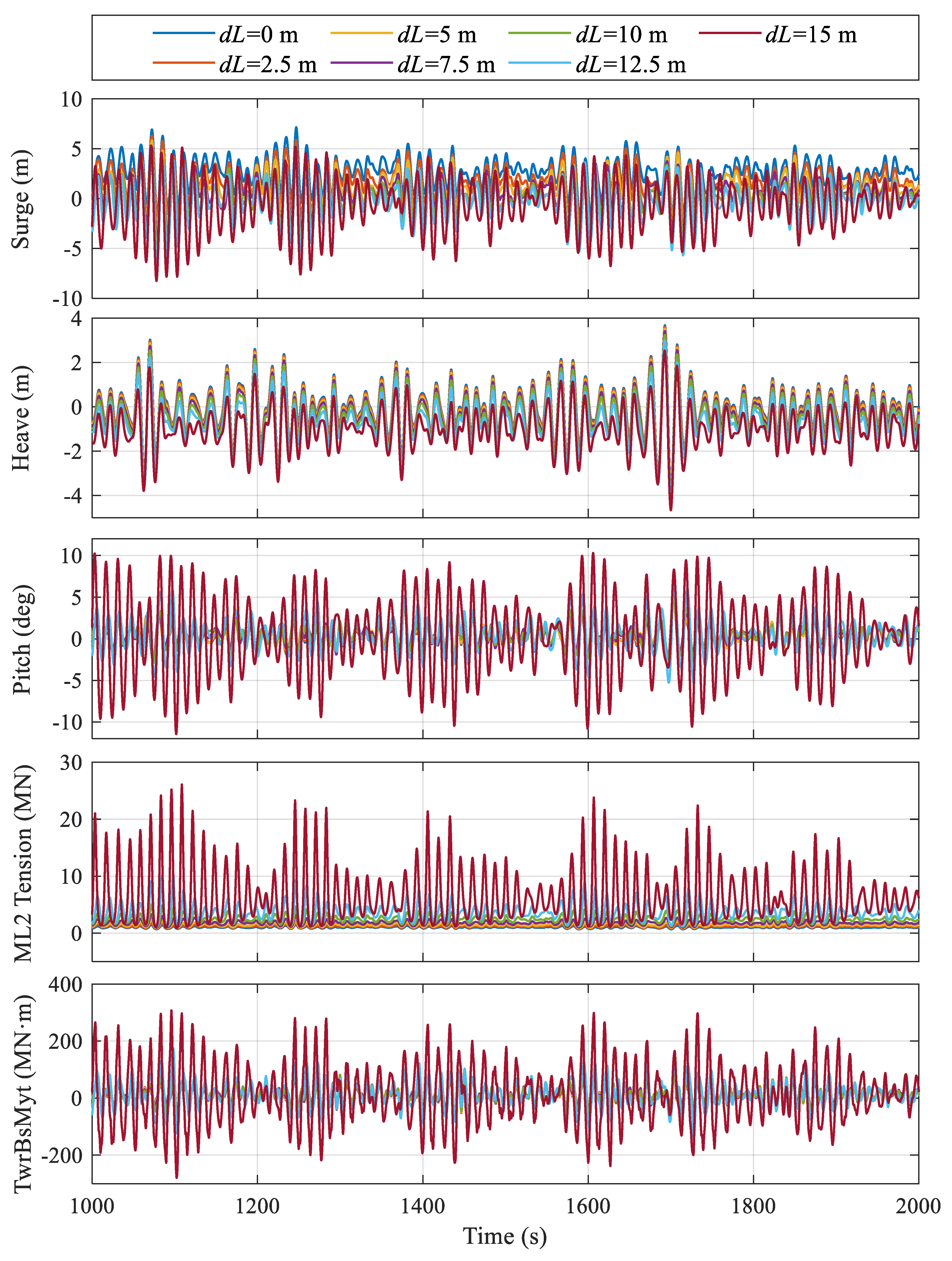
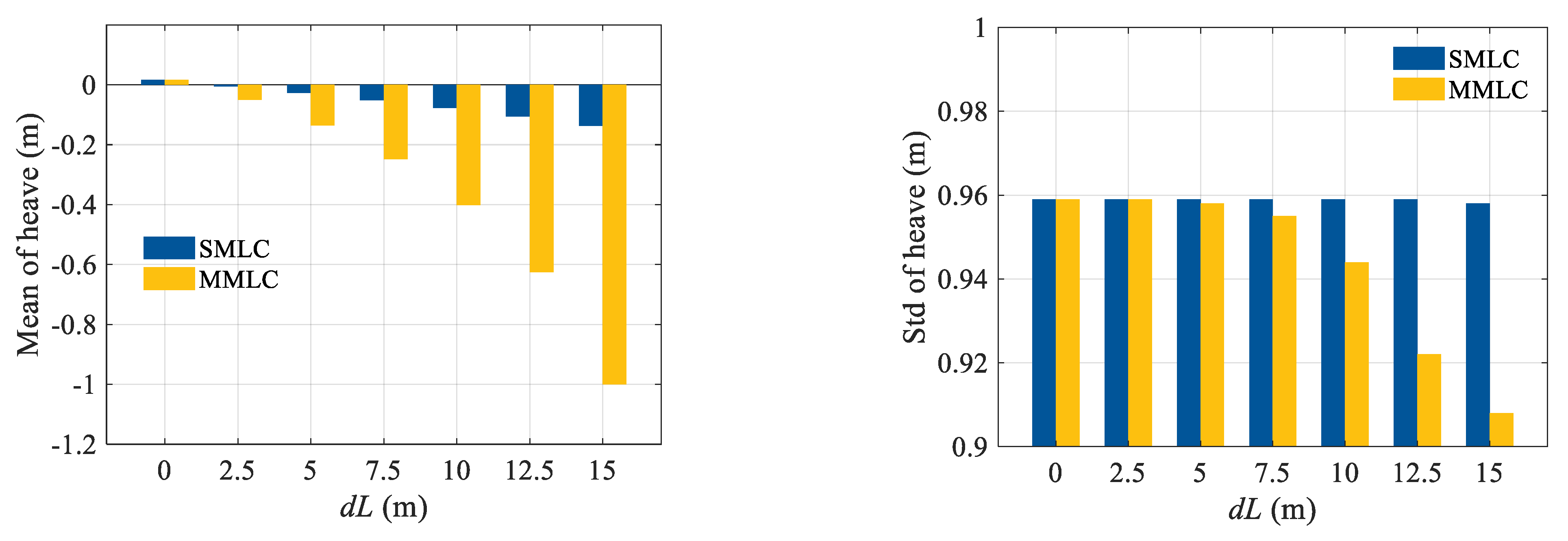
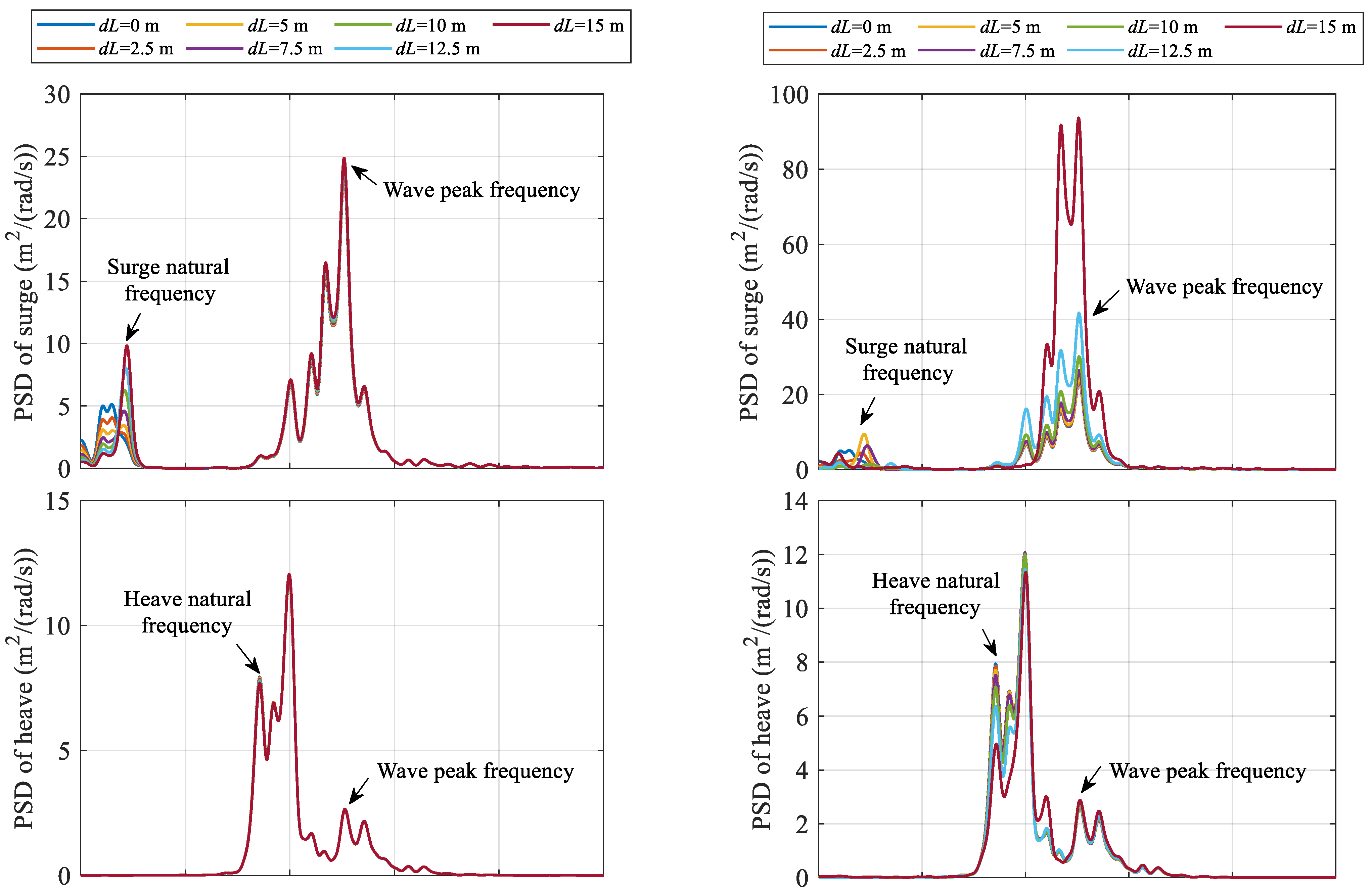
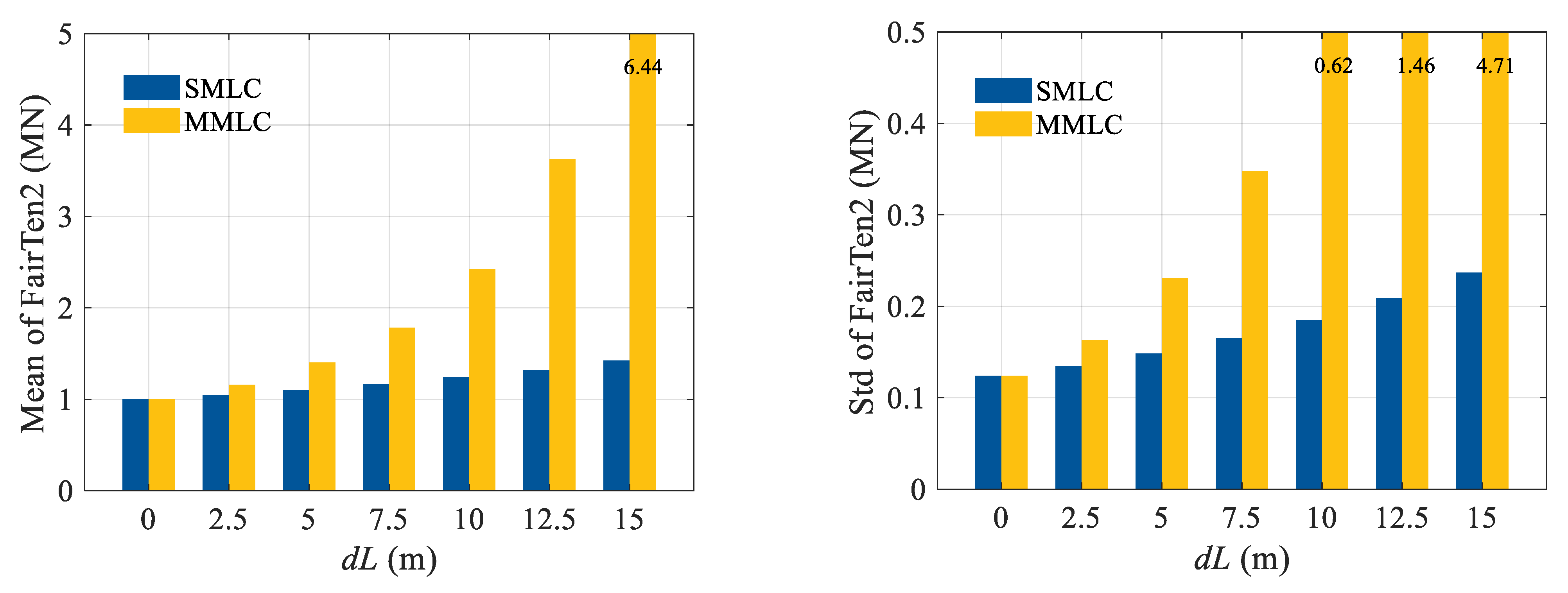
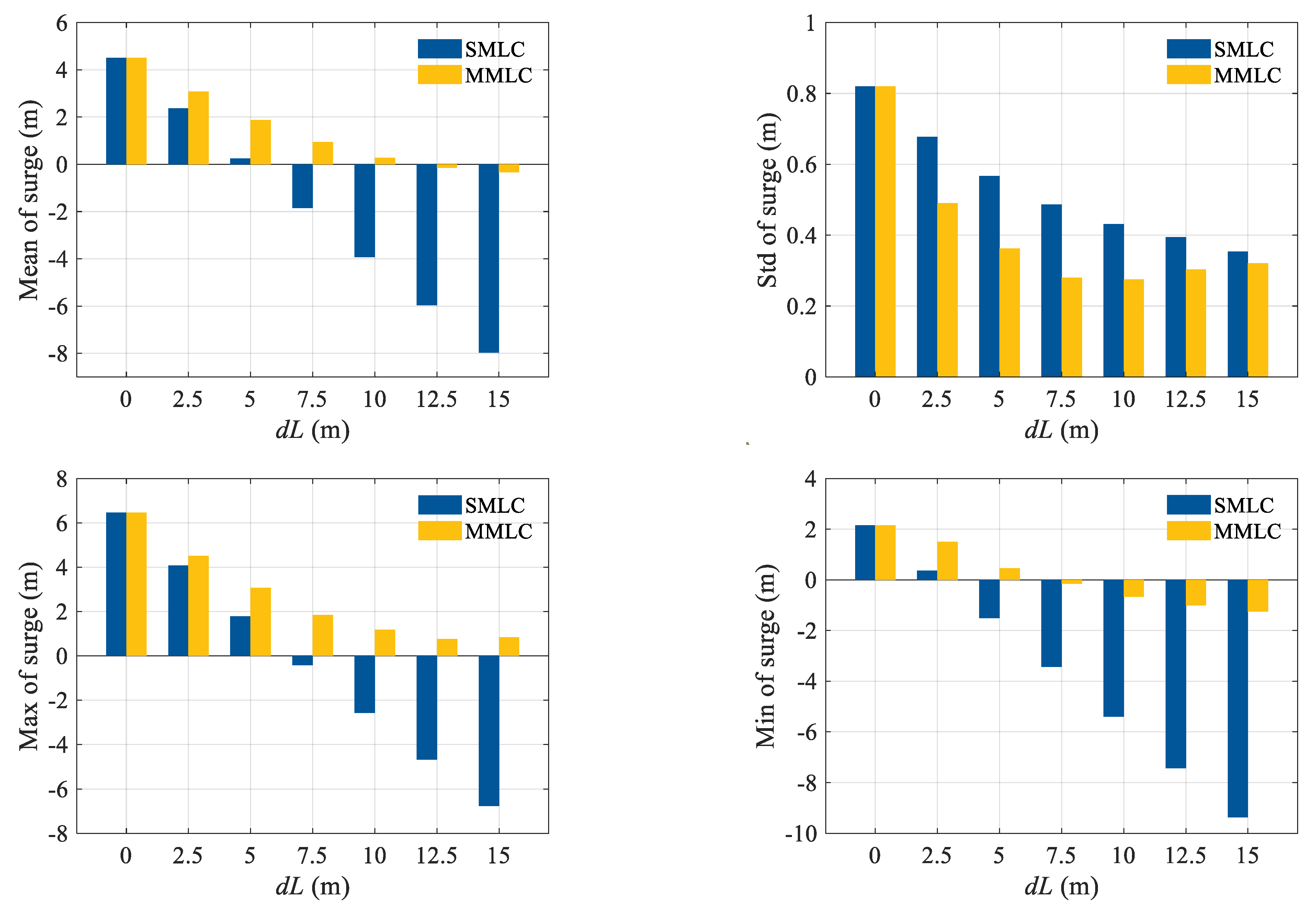
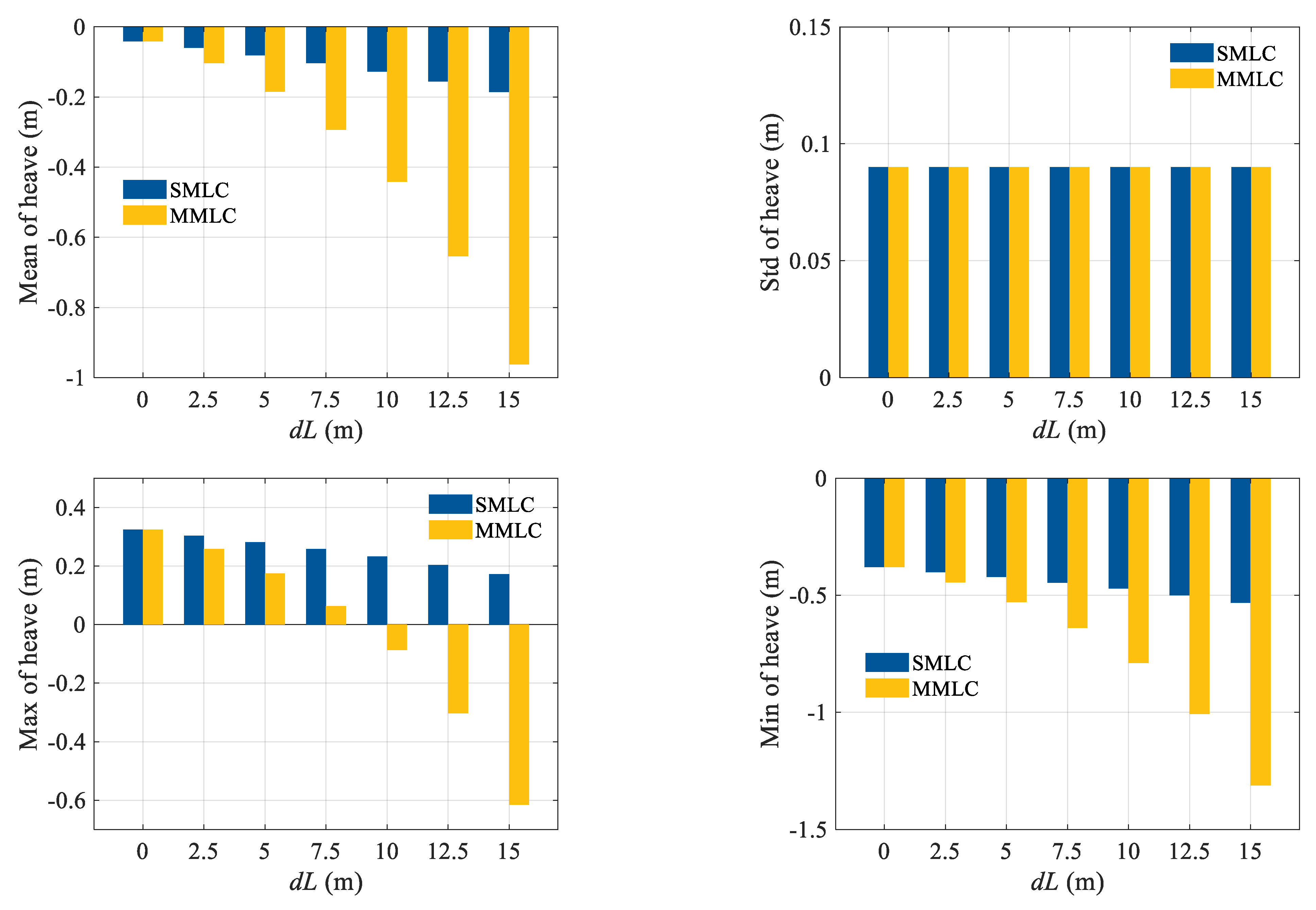
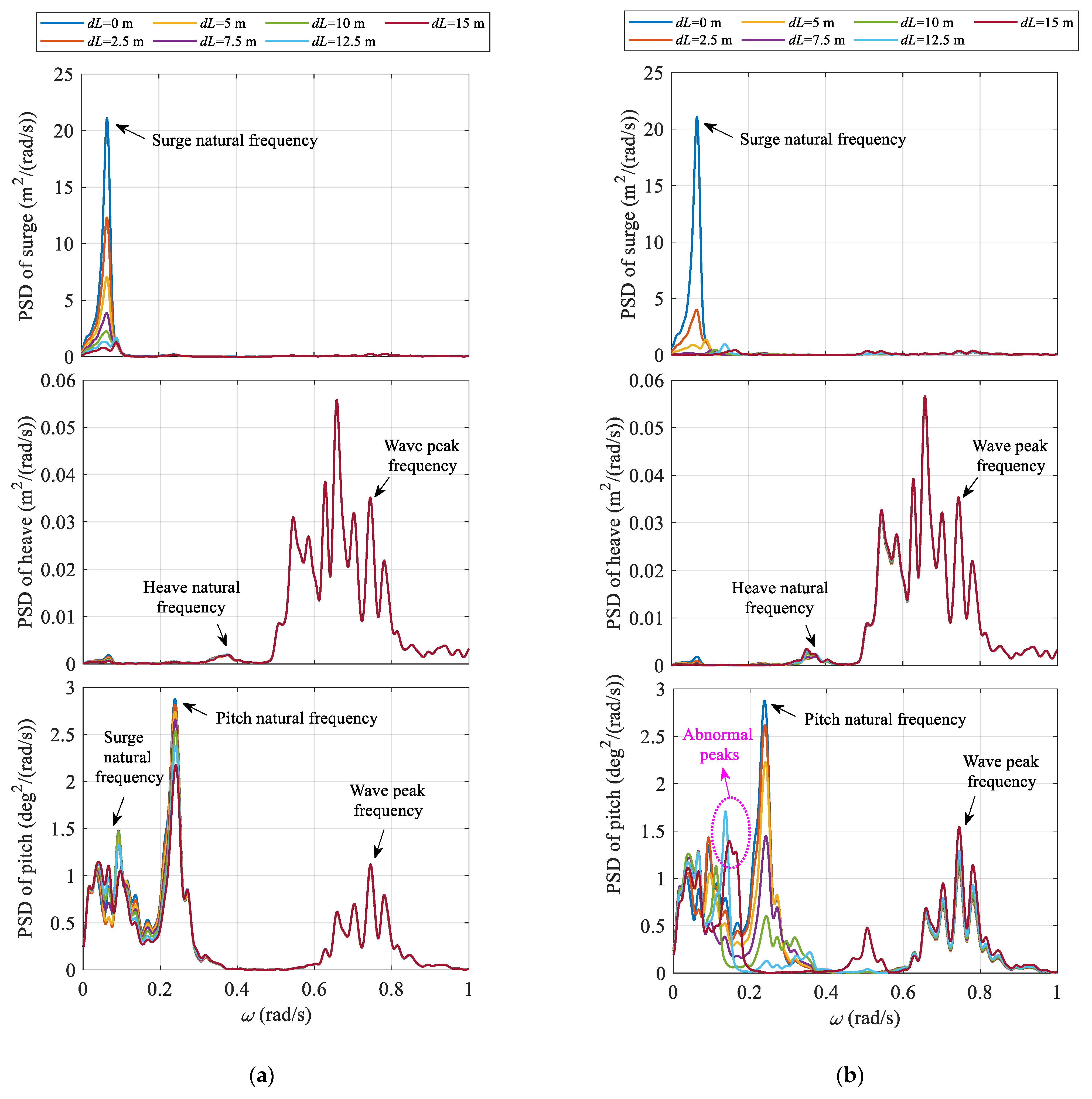
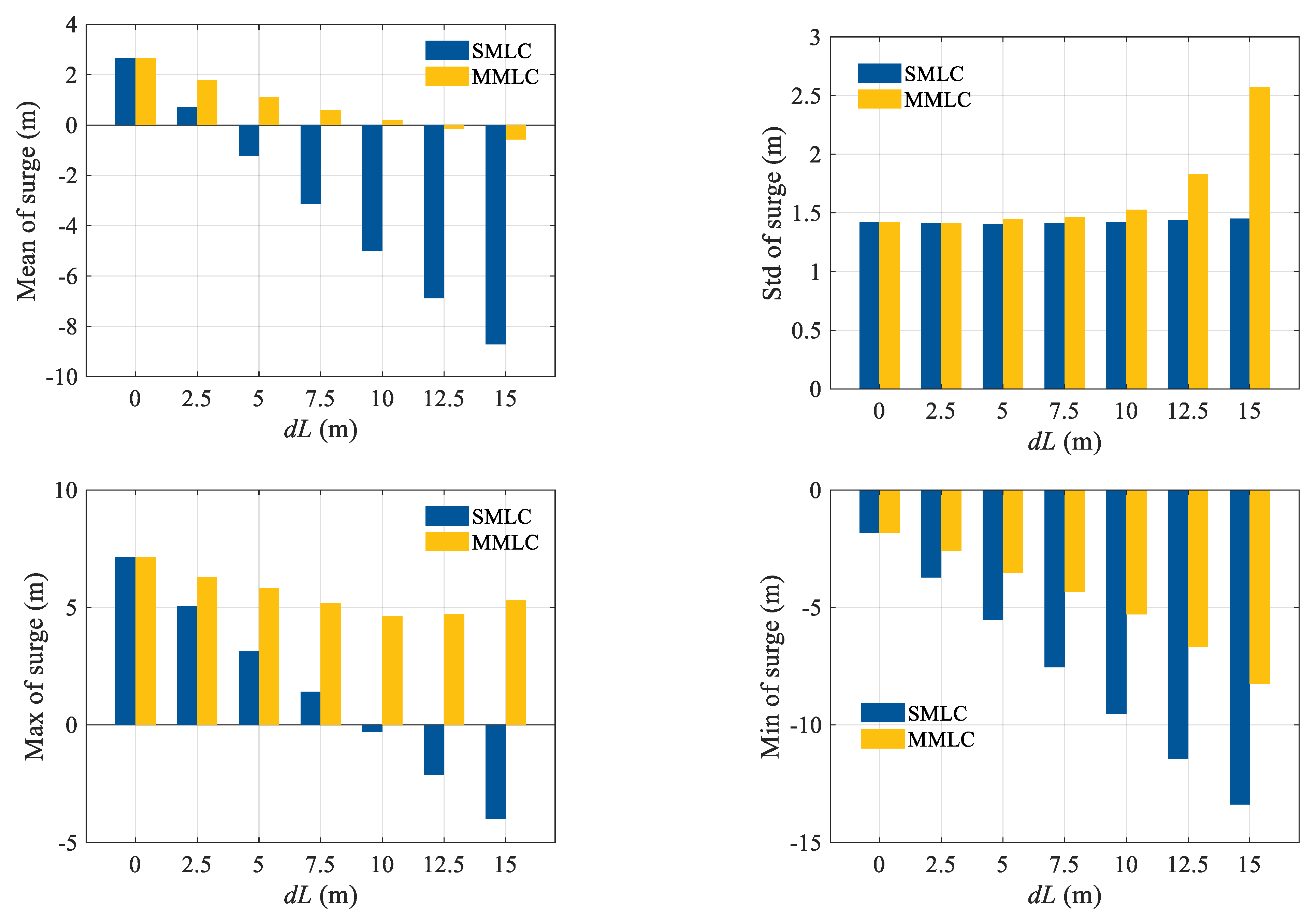
- The SMLC will result in a substantial change in platform surge motion due to the asymmetric mooring configuration under the rated conditions. For the MMLC, the surge standard deviation will rise when all the three mooring lines are retracted for more 12.5 m.
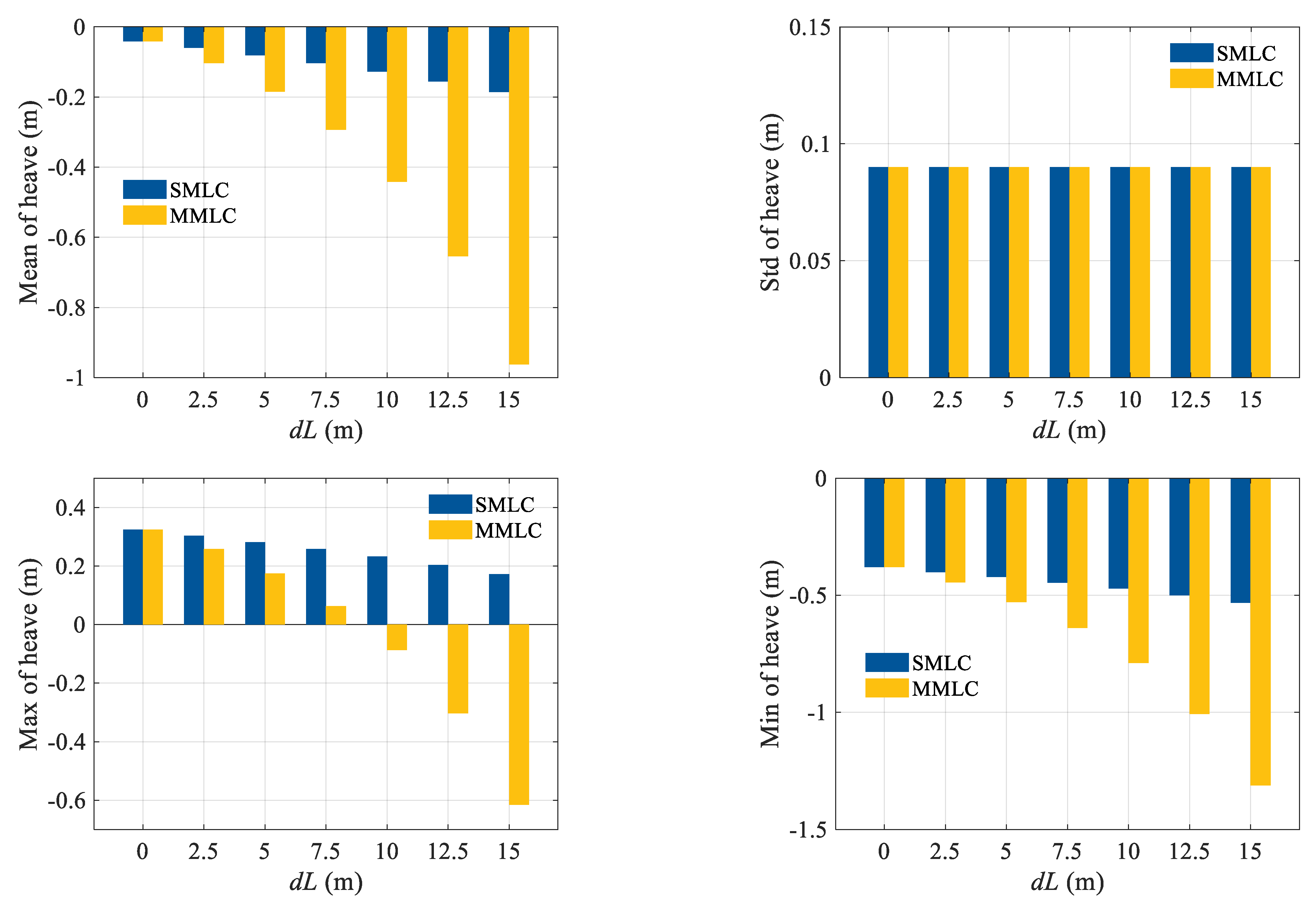
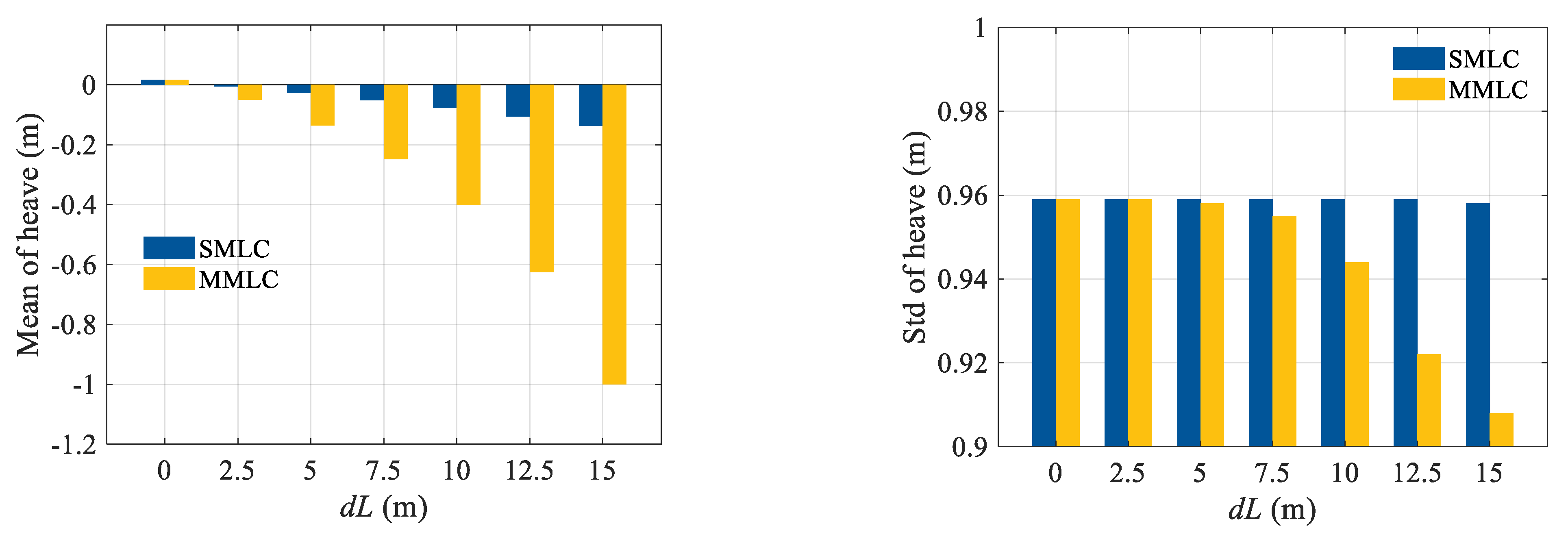
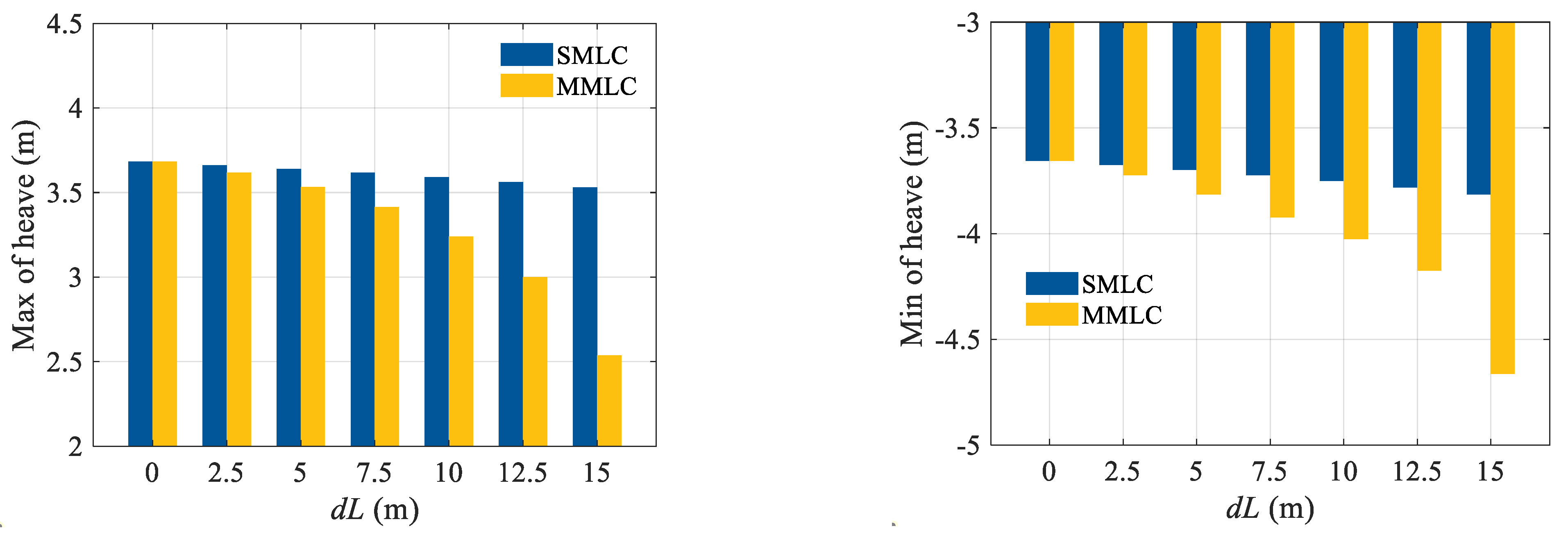
- Platform heave motion is not affected much by the catenary mooring control, as it is dominated by the column geometries of the floater.
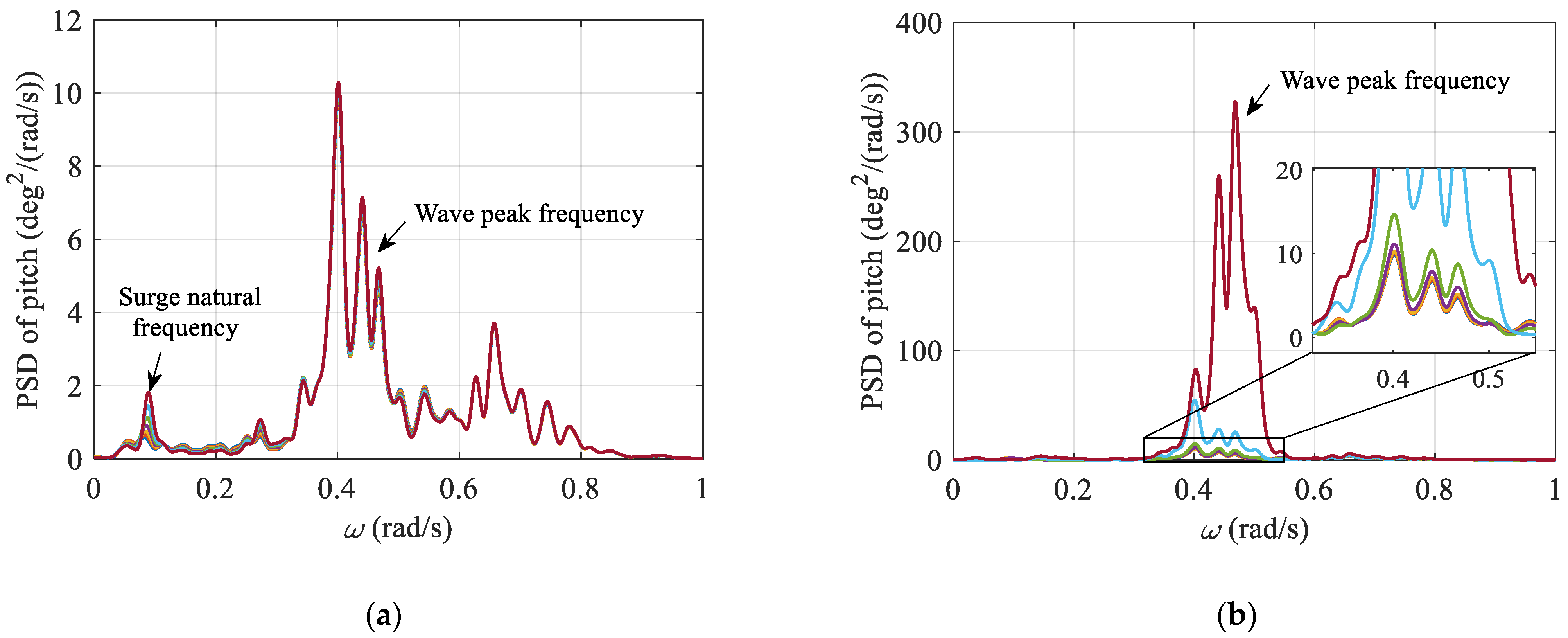
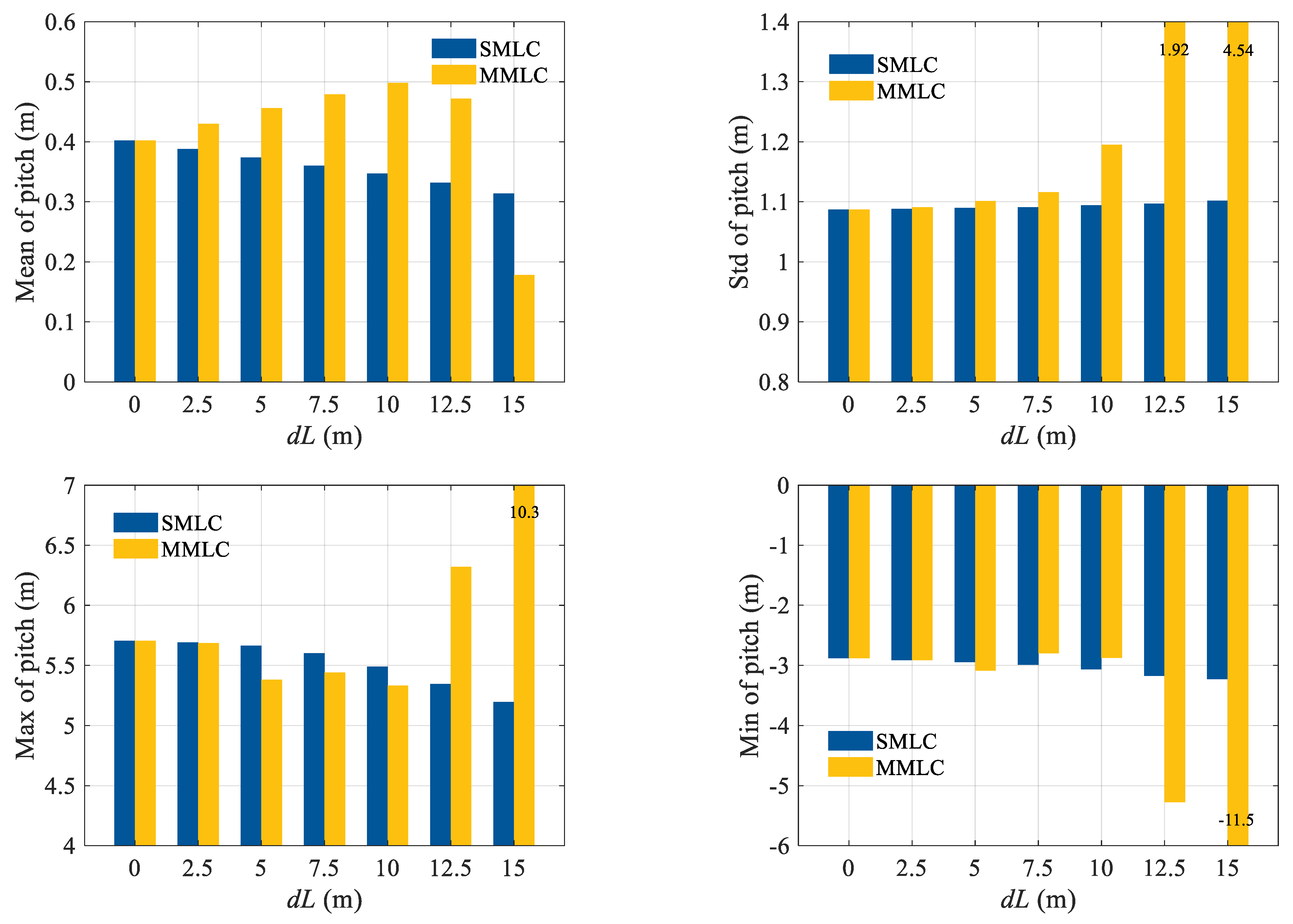
- Only 0.1° mean pitch angle reduction is achieved, which is a bit far from the assumed zero tilting, meaning it is quite difficult to achieve zero mean pitch by catenary mooring length re-configuration.
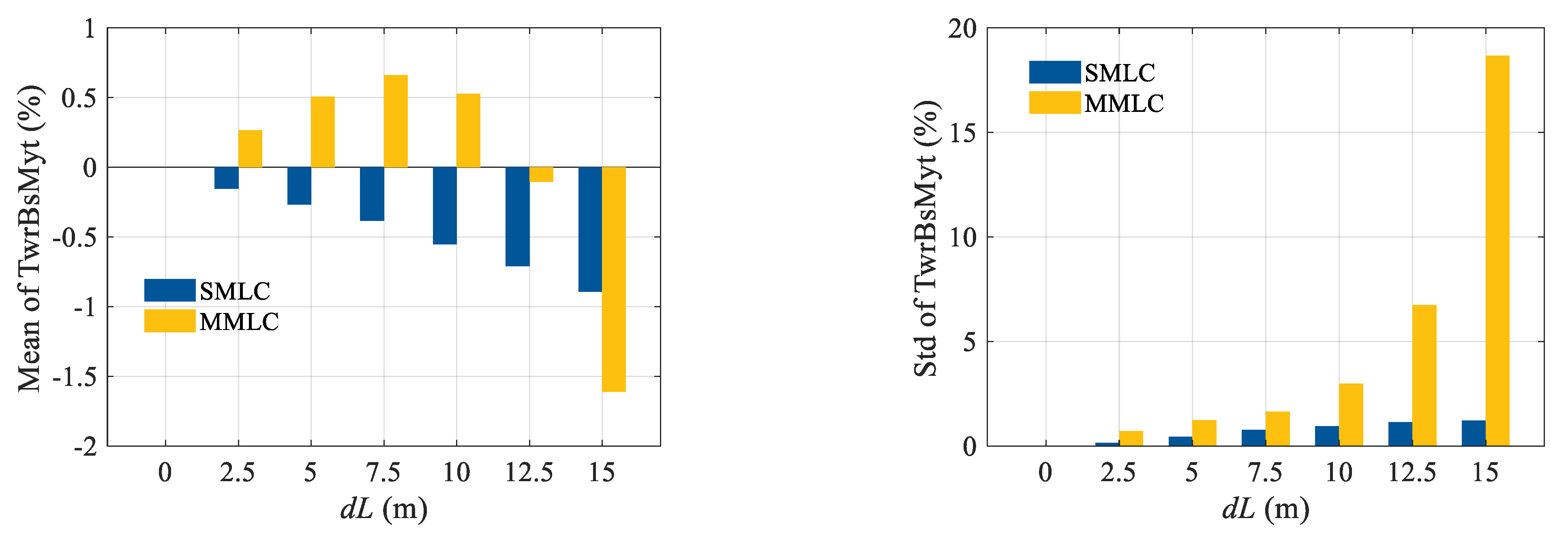
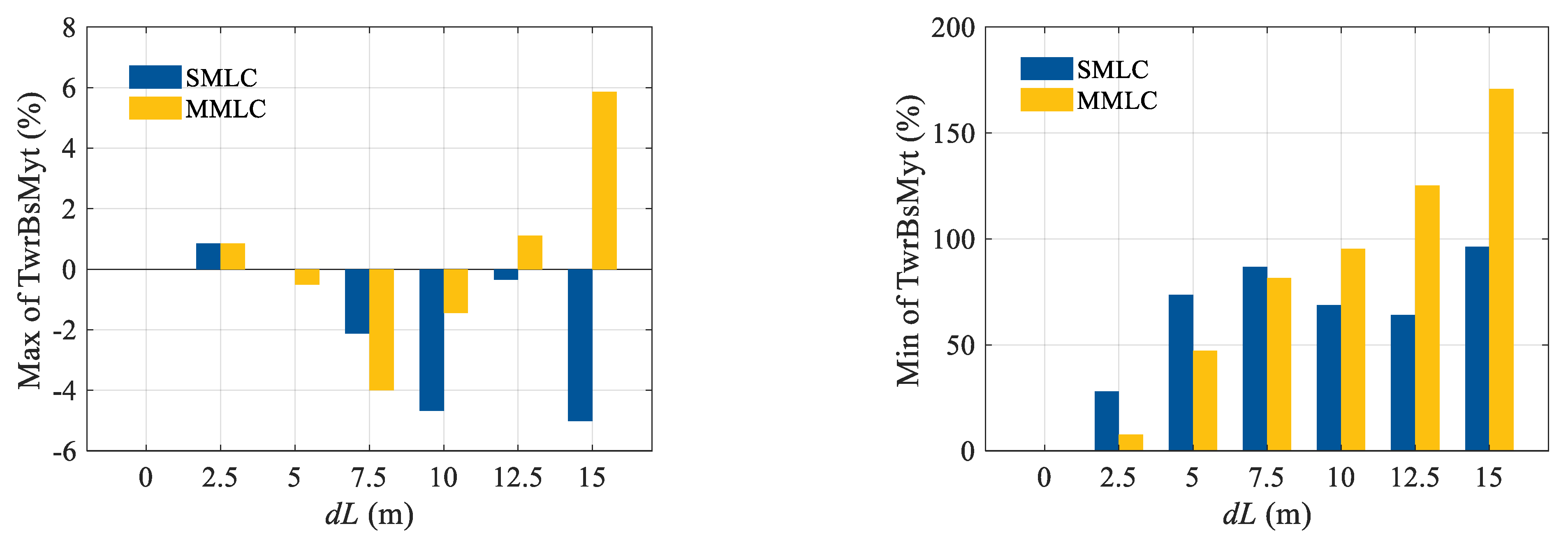
- Under the rated conditions, pitch standard deviation could be reduced by 5.1% for the SMLC, and this number could reach 15.8% for the MMLC. This demonstrates that the proposed mooring control strategy is helpful to mitigate the floater pitch oscillations.
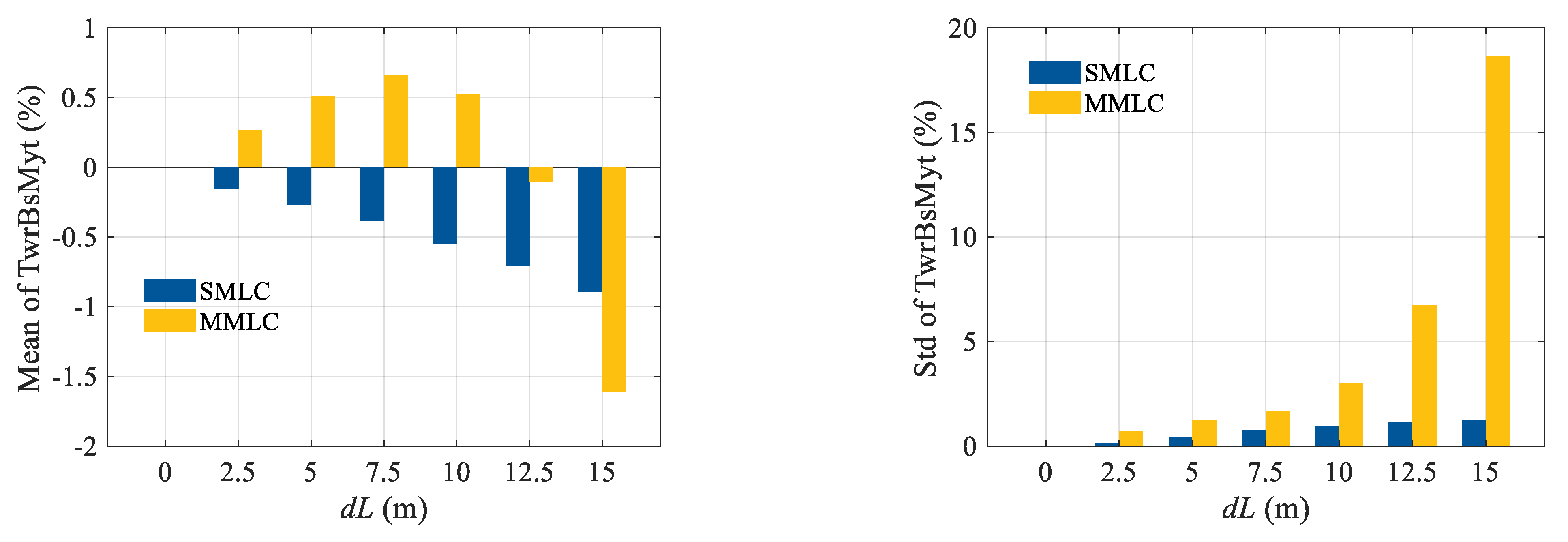
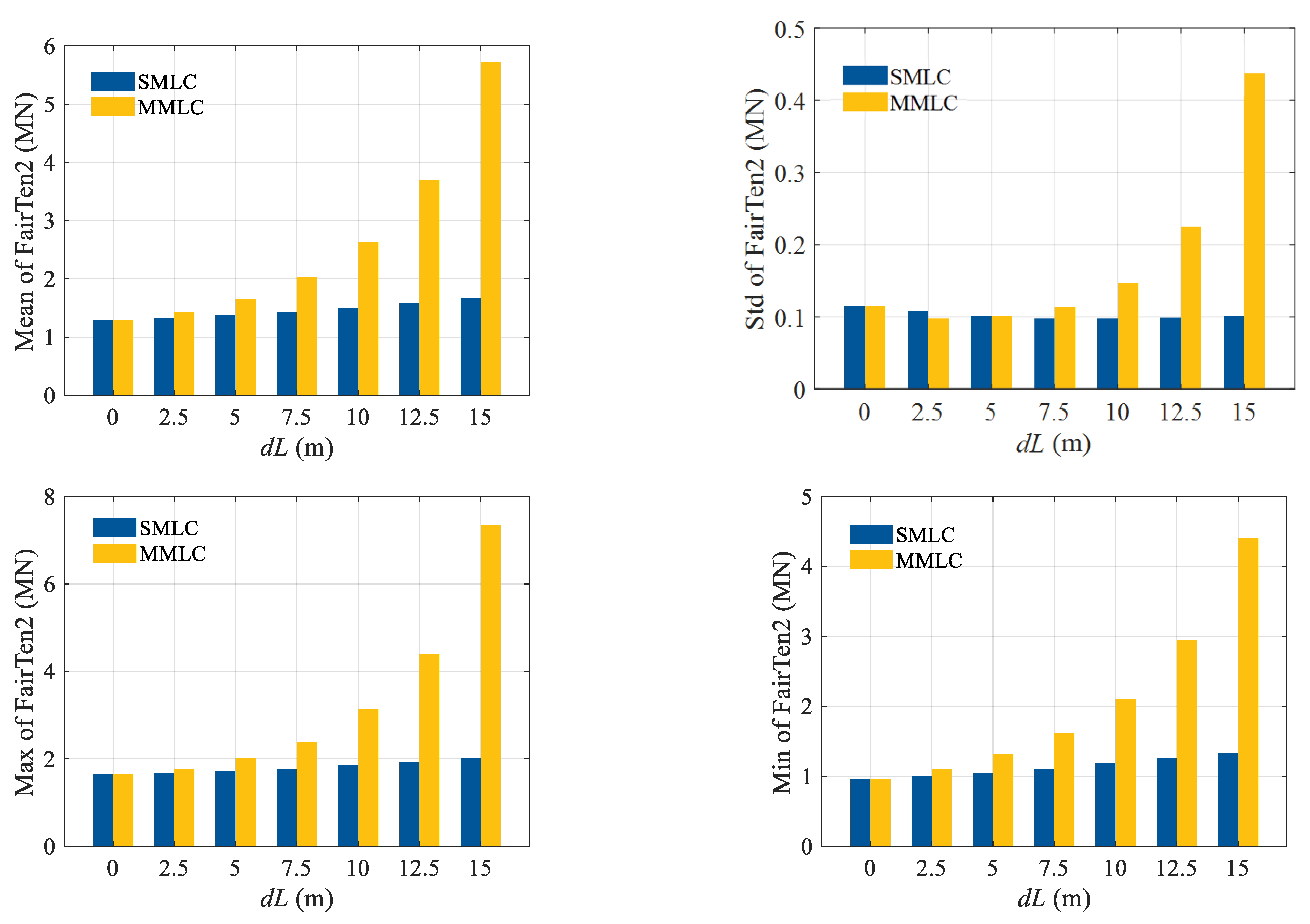
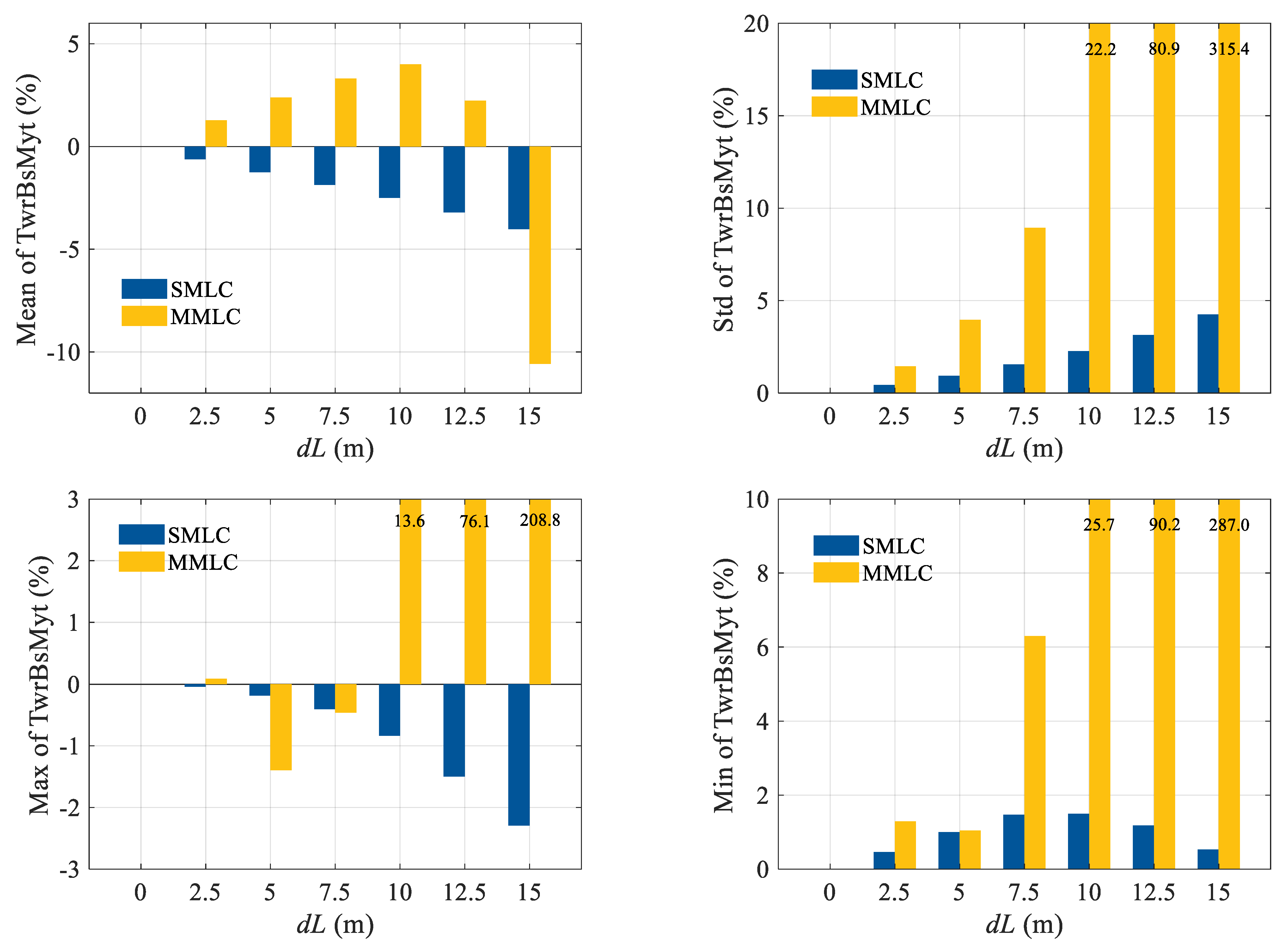
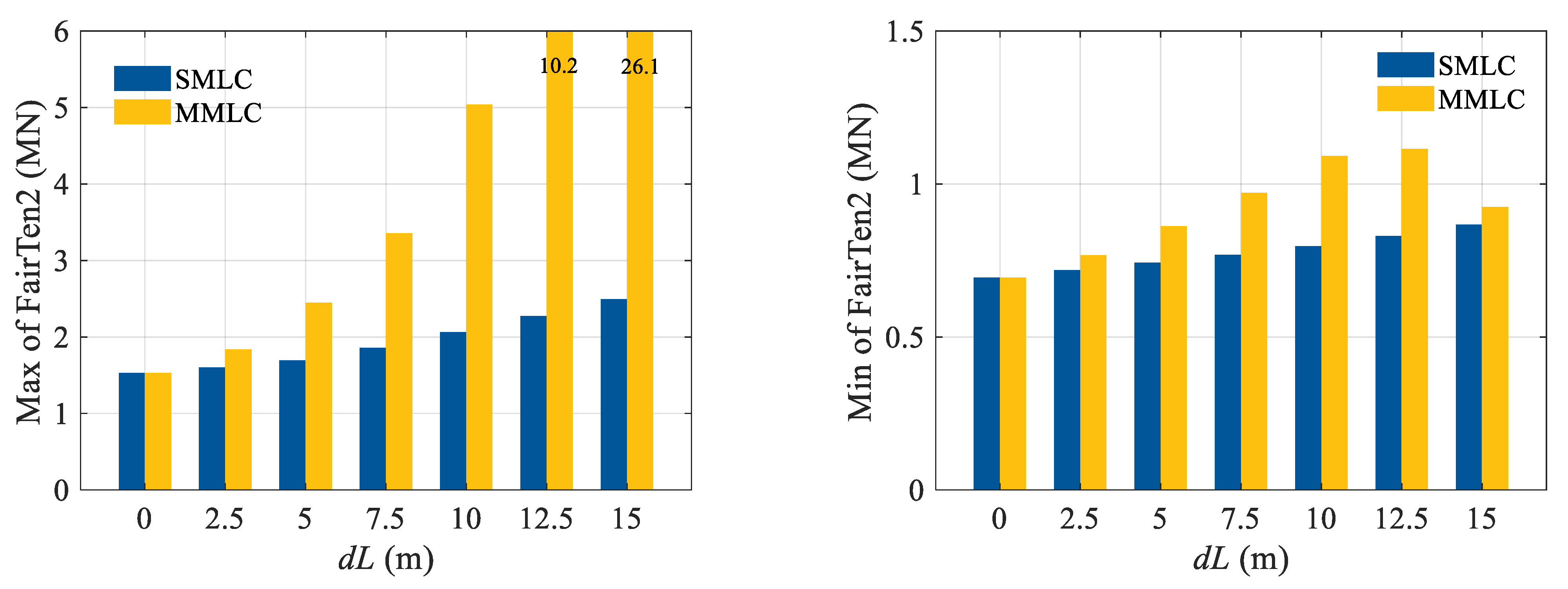
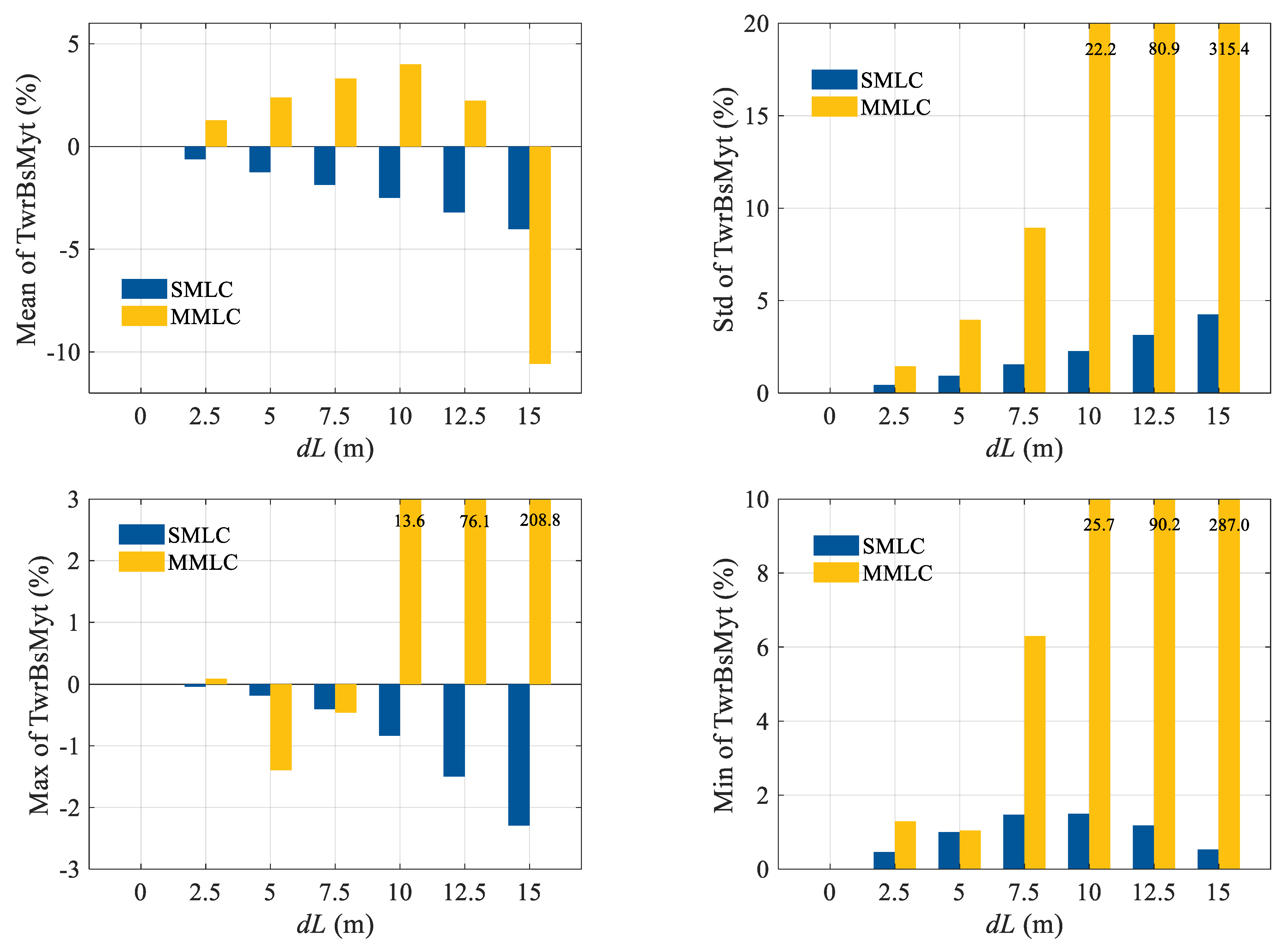
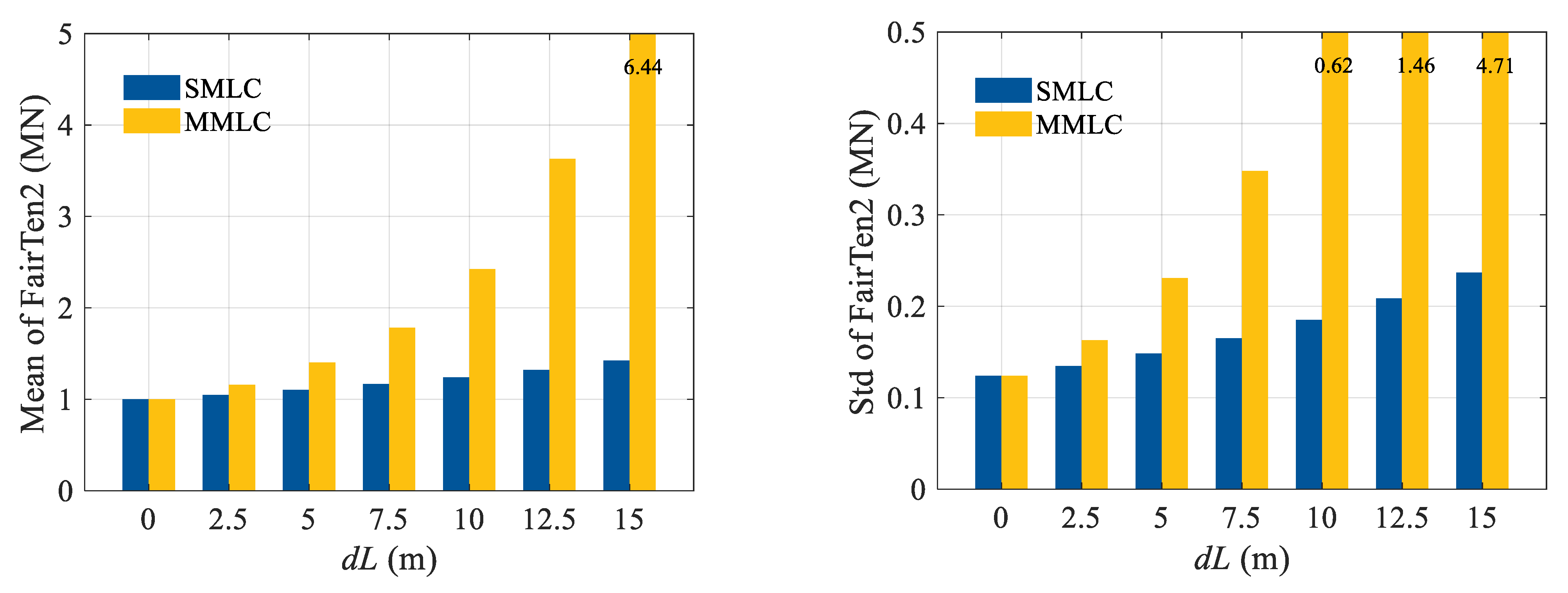
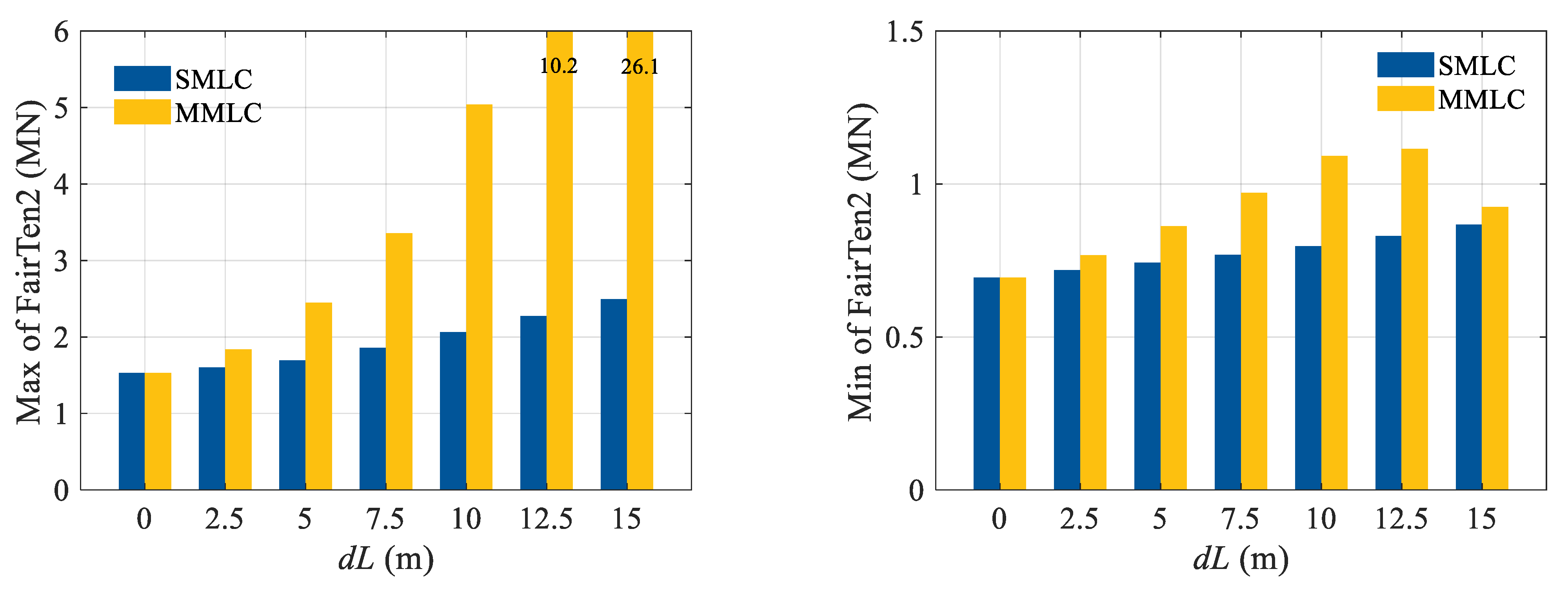
- Under extreme conditions, pitch standard deviation is almost not changed for the SMLC, while the pitch standard deviation may be increased by over 100% for the MMLC when the mooring length is shortened by over 12.5 m, where the catenary mooring might become taut, which will cause large load variations, posing risks to mooring line breakages and anchor failures.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- GWE Council. Global Offshore Wind Report 2022; GWEC: Brussels, Belgium, 2022. [Google Scholar]
- Barooni, M.; Ashuri, T.; Velioglu Sogut, D.; Wood, S.; Ghaderpour Taleghani, S. Floating offshore wind turbines: Current status and future prospects. Energies 2022, 16, 2. [Google Scholar] [CrossRef]
- Gu, Y.; Wang, P.; Rong, Z.; Wei, H.; Yang, S.; Zhang, K.; Tang, Z.; Han, T.; Si, Y. Vessel intrusion interception utilising unmanned surface vehicles for offshore wind farm asset protection. Ocean Eng. 2024, 299, 117395. [Google Scholar] [CrossRef]
- Barter, G.E.; Robertson, A.; Musial, W. A systems engineering vision for floating offshore wind cost optimization. Renew. Energy Focus 2020, 34, 1–16. [Google Scholar] [CrossRef]
- Jonkman, J.M. Dynamics Modeling and Loads Analysis of an Offshore Floating Wind Turbine. Ph.D. Thesis, Department of Aerospace Engineering Sciences, University of Colorado, Boulder, CO, USA, 2007. [Google Scholar]
- Jonkman, J.M.; Matha, D. Dynamics of offshore floating wind turbines—Analysis of three concepts. Wind Energy 2011, 14, 557–569. [Google Scholar] [CrossRef]
- Shi, W.; Zhang, L.; Karimirad, M.; Michailides, C.; Jiang, Z.; Li, X. Combined effects of aerodynamic and second-order hydrodynamic loads for floating wind turbines at different water depths. Appl. Ocean Res. 2023, 130, 103416. [Google Scholar] [CrossRef]
- Tsao, W.H.; Kees, C.E. An arbitrary Lagrangian-Eulerian regularized boundary integral method for nonlinear free-surface flows over complex topography and wave-structure interaction. Eng. Anal. Bound. Elem. 2023, 157, 326–341. [Google Scholar] [CrossRef]
- Subbulakshmi, A.; Verma, M.; Keerthana, M.; Sasmal, S.; Harikrishna, P.; Kapuria, S. Recent advances in experimental and numerical methods for dynamic analysis of floating offshore wind turbines—An integrated review. Renew. Sustain. Energy Rev. 2022, 164, 112525. [Google Scholar] [CrossRef]
- Patryniak, K.; Collu, M.; Coraddu, A. Multidisciplinary design analysis and optimisation frameworks for floating offshore wind turbines: State of the art. Ocean Eng. 2022, 251, 111002. [Google Scholar] [CrossRef]
- Shah, K.A.; Meng, F.; Li, Y.; Nagamune, R.; Zhou, Y.; Ren, Z.; Jiang, Z. A synthesis of feasible control methods for floating offshore wind turbine system dynamics. Renew. Sustain. Energy Rev. 2021, 151, 111525. [Google Scholar] [CrossRef]
- Sun, W.; Yuan, Y. Passivity based hierarchical multi-task tracking control for redundant manipulators with uncertainties. Automatica 2023, 155, 111159. [Google Scholar] [CrossRef]
- Wang, B.; Ma, Z.; Lai, S.; Zhao, L. Neural moving horizon estimation for robust flight control. IEEE Trans. Robot. 2023, 40, 639–659. [Google Scholar] [CrossRef]
- Zhuang, S.; Lei, D.; Yu, X.; Tong, M.; Lin, W.; Rodriguez-Andina, J.J.; Shi, Y.; Gao, H. Microinjection in biomedical applications: An effortless autonomous omnidirectional microinjection system. IEEE Ind. Electron. Mag. 2023. early access. [Google Scholar] [CrossRef]
- Sun, W.; Wang, X.; Zhang, C. A model-free control strategy for vehicle lateral stability with adaptive dynamic programming. IEEE Trans. Ind. Electron. 2019, 67, 10693–10701. [Google Scholar] [CrossRef]
- López-Queija, J.; Robles, E.; Jugo, J.; Alonso-Quesada, S. Review of control technologies for floating offshore wind turbines. Renew. Sustain. Energy Rev. 2022, 167, 112787. [Google Scholar] [CrossRef]
- Jonkman, J. Influence of control on the pitch damping of a floating wind turbine. In Proceedings of the 46th AIAA Aerospace Sciences Meeting and Exhibit, Reno, Nevada, 7–10 January 2008; p. 1306. [Google Scholar]
- Christiansen, S.; Knudsen, T.; Bak, T. Optimal control of a ballast-stabilized floating wind turbine. In Proceedings of the 2011 IEEE International Symposium on Computer-Aided Control System Design (CACSD), Denver, CO, USA, 28–30 September 2011; pp. 1214–1219. [Google Scholar]
- Namik, H.; Stol, K. Individual blade pitch control of floating offshore wind turbines. Wind Energy 2009, 13, 74–85. [Google Scholar] [CrossRef]
- Zhao, P.; Nagamune, R. Switching LPV control of a floating offshore wind turbine on a semi-submersible platform. In Proceedings of the 2019 IEEE 28th International Symposium on Industrial Electronics (ISIE), Vancouver, BC, Canada, 12–14 June 2019; pp. 664–669. [Google Scholar]
- Bakka, T.; Karimi, H.R. Mixed H2/H∞ control design for wind turbine system with pole placement constraints. In Proceedings of the 31st Chinese Control Conference, Hefei, China, 25–27 July 2012. [Google Scholar]
- Lackner, M.A.; Rotea, M.A. Structural control of floating wind turbines. Mechatronics 2011, 21, 704–719. [Google Scholar] [CrossRef]
- Tsao, W.H.; Chen, Y.C.; Kees, C.E.; Manuel, L. Response mitigation of floating platform by porous-media-tuned liquid dampers. J. Offshore Mech. Arct. Eng. 2023, 145, 051203. [Google Scholar] [CrossRef]
- Tong, X.; Zhao, X.; Karcanias, A. Passive vibration control of an offshore floating hydrostatic wind turbine model. Wind Energy 2018, 21, 697–714. [Google Scholar] [CrossRef]
- Roddier, D.; Cermelli, C.; Aubault, A.; Weinstein, A. WindFloat: A floating foundation for offshore wind turbines. J. Renew. Sustain. Energy 2010, 2, 033104. [Google Scholar] [CrossRef]
- Li, Y.; Wu, Z. Stabilization of floating offshore wind turbines by artificial muscle based active mooring line force control. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 2277–2282. [Google Scholar]
- Benassai, G.; Campanile, A.; Piscopo, V.; Scamardella, A. Mooring control of semi-submersible structures for wind turbines. Procedia Eng. 2014, 70, 132–141. [Google Scholar] [CrossRef]
- Si, Y.; Chen, Z.; Zeng, W.; Sun, J.; Zhang, D.; Ma, X.; Qian, P. The influence of power-take-off control on the dynamic response and power output of combined semi-submersible floating wind turbine and point-absorber wave energy converters. Ocean Eng. 2021, 227, 108835. [Google Scholar] [CrossRef]
- Zhang, D.; Chen, Z.; Liu, X.; Sun, J.; Yu, H.; Zeng, W.; Ying, Y.; Sun, Y.; Cui, L.; Yang, S.; et al. A coupled numerical framework for hybrid floating offshore wind turbine and oscillating water column wave energy converters. Energy Convers. Manag. 2022, 267, 115933. [Google Scholar] [CrossRef]
- Si, Y.; Karimi, H.R.; Gao, H. Modelling and optimization of a passive structural control design for a spar-type floating wind turbine. Eng. Struct. 2014, 69, 168–182. [Google Scholar] [CrossRef]
- Zuo, H.; Bi, K.; Hao, H. A state-of-the-art review on the vibration mitigation of wind turbines. Renew. Sustain. Energy Rev. 2020, 121, 109710. [Google Scholar] [CrossRef]
- Stockhouse, D.; Phadnis, M.; Grant, E.; Johnson, K.; Damiani, R.; Pao, L. Control of a floating wind turbine on a novel actuated platform. In Proceedings of the 2022 American Control Conference (ACC), Atlanta, GA, USA, 8–10 June 2022; pp. 3532–3537. [Google Scholar]
- Grant, E.; Johnson, K.; Damiani, R.; Phadnis, M.; Pao, L. Buoyancy can ballast control for increased power generation of a floating offshore wind turbine with a light-weight semi-submersible platform. Appl. Energy 2023, 330, 120287. [Google Scholar] [CrossRef]
- Wu, Z.; Li, Y. Platform stabilization of floating offshore wind turbines by artificial muscle based active mooring line force control. IEEE/ASME Trans. Mechatron. 2020, 25, 2765–2776. [Google Scholar] [CrossRef]
- Wu, Z.; Li, Y. Hybrid model predictive control of floating offshore wind turbines with artificial muscle actuated mooring lines. J. Dyn. Syst. Meas. Control 2022, 144, 051003. [Google Scholar] [CrossRef]
- Aase, Ø. Modeling and Control of Catenary Mooring Systems for Vessels, Oil Rigs, and Barges. Master’s Thesis, NTNU, Trondheim, Norway, 2018. [Google Scholar]
- Dinius, J.D.; Damiani, R.; Johnson, K.; Grant, E.; Pao, L.Y.; Phadnis, M. Control actuation options for the SpiderFLOAT floating offshore wind substructure. In Proceedings of the 2022 AIAA SCITECH Forum, San Diego, CA, USA, 3–7 January 2022; p. 2295. [Google Scholar]
- Suzuki, H.; Shiohara, H.; Schnepf, A.; Houtani, H.; Carmo, L.H.; Hirabayashi, S.; Haneda, K.; Chujo, T.; Nihei, Y.; Malta, E.B.; et al. Wave and wind responses of a very-light FOWT with guy-wired-supported tower: Numerical and experimental studies. J. Mar. Sci. Eng. 2020, 8, 841. [Google Scholar] [CrossRef]
- Nagumo, T.; Suzuki, H.; Houtani, H.; Takaoka, M.; Gonçalves, R.T. Experimental and numerical studies on regular wave responses of a very-light FOWT with a guy-wired-supported tower: Effects of wave height, wave direction, and mooring line configuration. Ocean Eng. 2024, 295, 116844. [Google Scholar] [CrossRef]
- Available online: https://github.com/OpenFAST/openfast (accessed on 1 March 2024).
- Robertson, A.; Jonkman, J.; Masciola, M.; Song, H.; Goupee, A.; Coulling, A.; Luan, C. Definition of the Semisubmersible Floating System for Phase II of OC4; NREL/TP-5000-60601; National Renewable Energy Lab (NREL): Golden, CO, USA, 2014. [Google Scholar]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; National Renewable Energy Lab (NREL): Golden, CO, USA, 2009. [Google Scholar]
- Jonkman, B.; Bhul, M.L. Turbsim Users Guide. Tech Rep. NREL/EL-500-36970; National Renewable Energy Laboratory: Golden, CO, USA, 2005. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
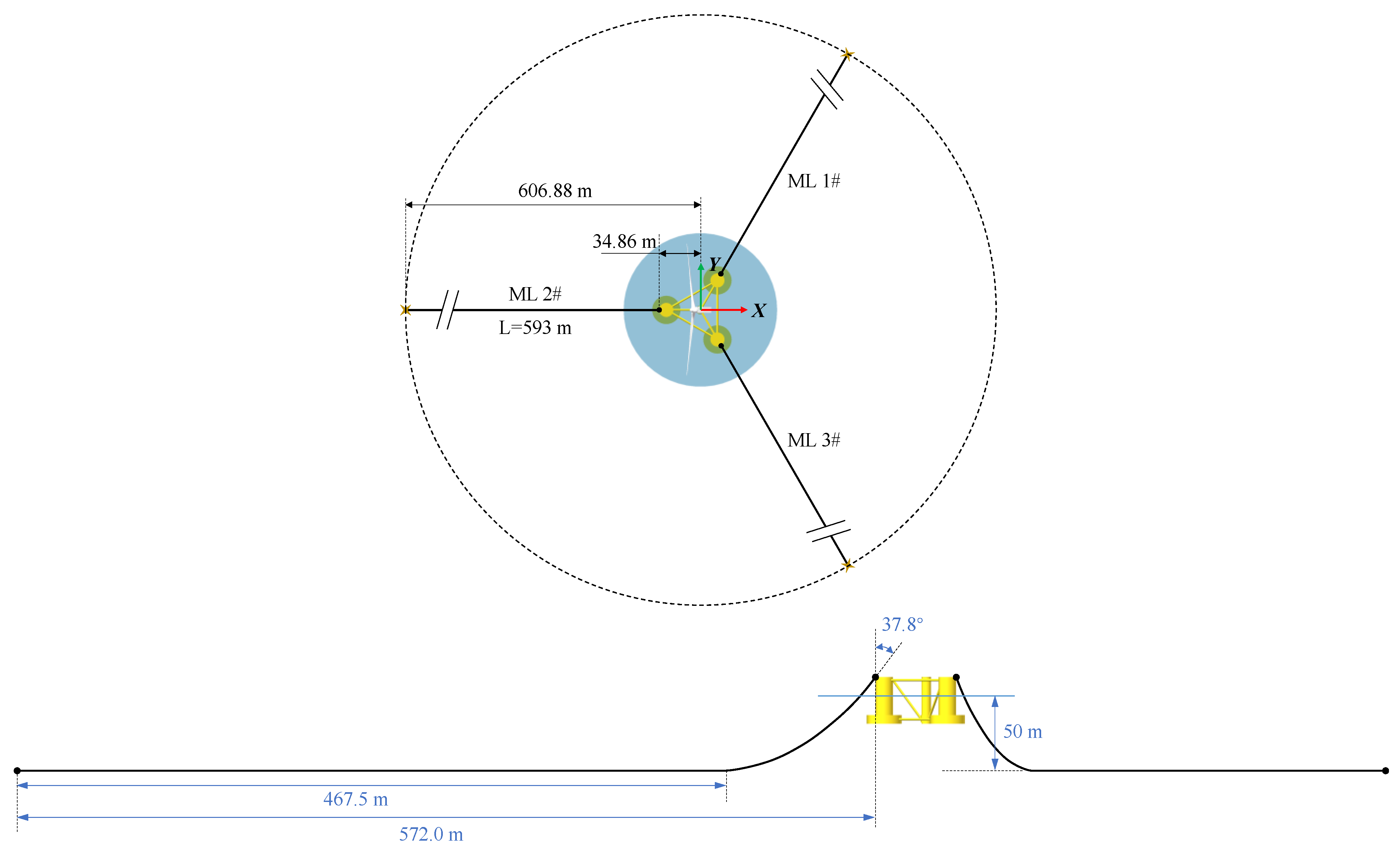
| Mooring Line No. | Anchor Location (m) | Fair-Lead Location (m) | Length (m) | Diameter (m) | Fairlead Initial Angle (deg) | Touchdown Length (m) | Pretension (MN) | Mass Density (kg/m) | Equivalent Extensional Stiffness (N) |
|---|---|---|---|---|---|---|---|---|---|
| ML 1 | (303.43, 525.56, −50) | (17.43, 30.20, 12) | 593 | 0.15 | 37.8 | 467.5 | 0.791 | 511.7 | 3 × 109 |
| ML 2 | (−606.8676, 0, −50) | (−34.8682, 0, 12) | 593 | 0.15 | 37.8 | 467.5 | 0.791 | 511.7 | 3 × 109 |
| ML 3 | (303.43, −525.56, −50) | (17.43, 30.20, 12) | 593 | 0.15 | 37.8 | 467.5 | 0.791 | 511.7 | 3 × 109 |
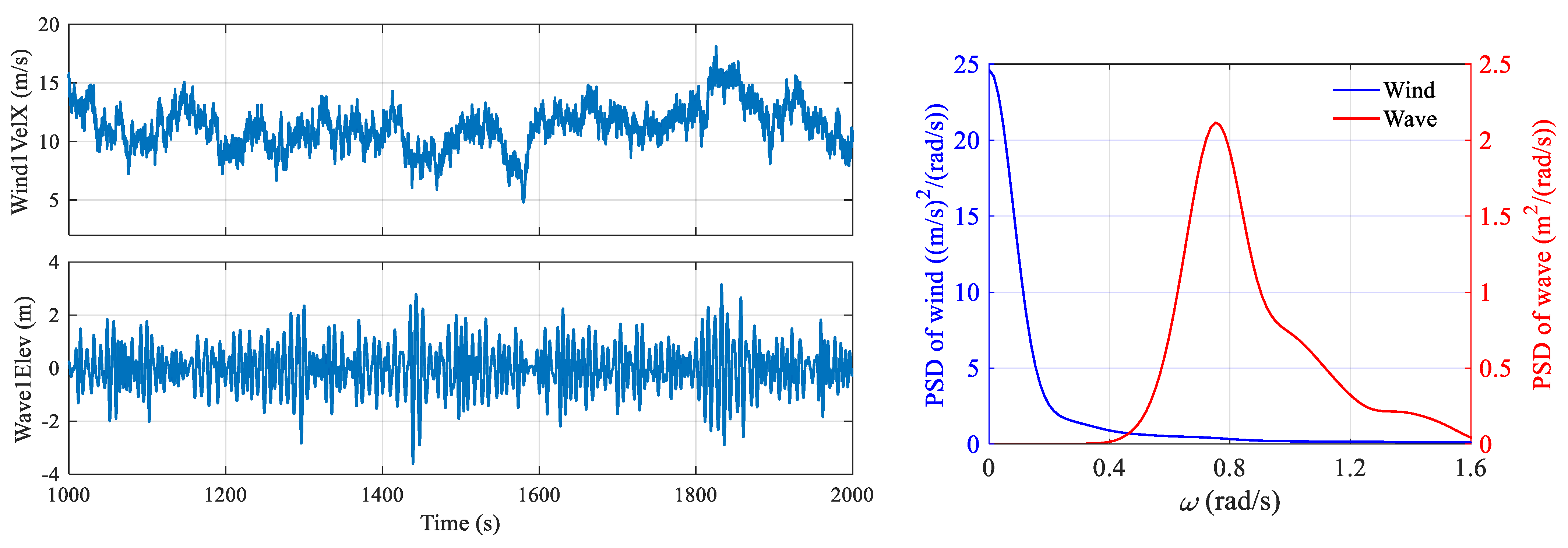
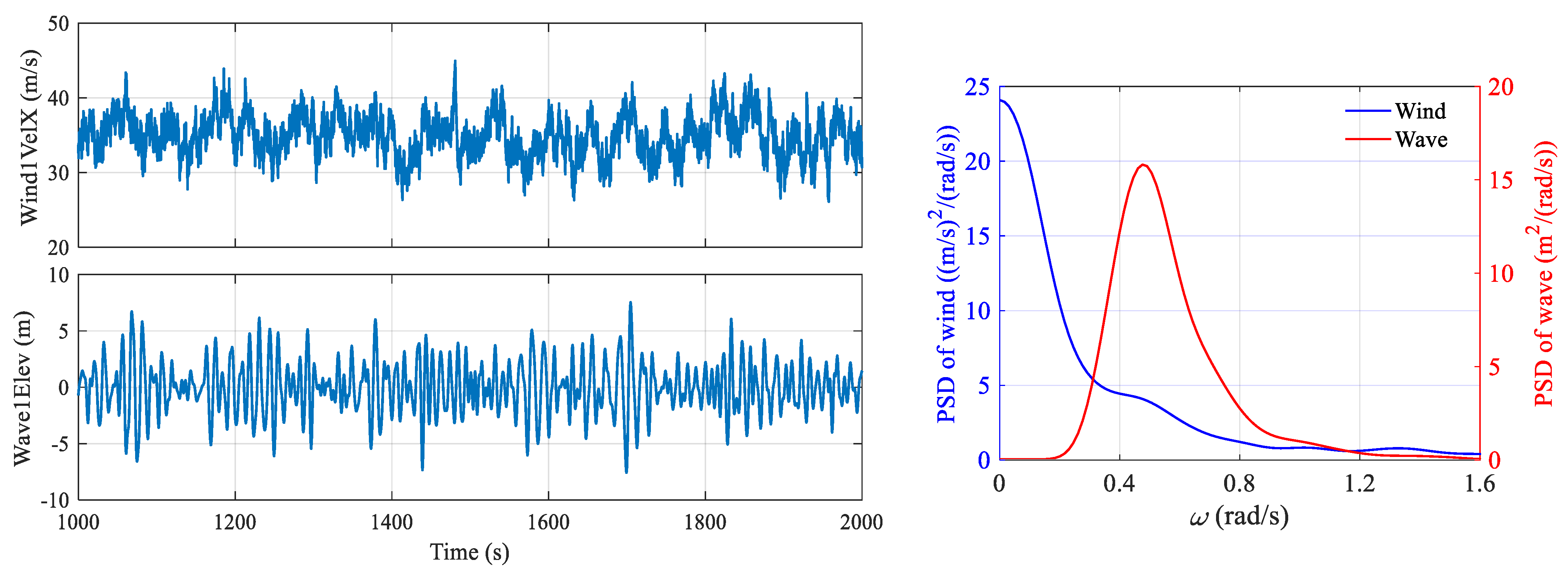
| Environmental Condition | Mean Wind Speed (m/s) | Turbulence Intensity (%) | Significant Wave Height (m) | Peak Wave Period (s) | Jonswap γ Factor | SMLC (m) | MMLC (m) |
|---|---|---|---|---|---|---|---|
| Rated condition | 11.4 | 15 | 3.8 | 8.3 | 2.35 | 0:2.5:15 | 0:2.5:15 |
| Extreme condition | 35 | 8 | 10.3 | 14.1 | 2.02 | 0:2.5:15 | 0:2.5:15 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Y.; Zhang, X.; Chen, J.; Liu, R.; Sun, J.; Si, Y. Catenary Mooring Length Control for Motion Mitigation of Semi-Submersible Floating Wind Turbines. J. Mar. Sci. Eng. 2024, 12, 628. https://doi.org/10.3390/jmse12040628
Zhou Y, Zhang X, Chen J, Liu R, Sun J, Si Y. Catenary Mooring Length Control for Motion Mitigation of Semi-Submersible Floating Wind Turbines. Journal of Marine Science and Engineering. 2024; 12(4):628. https://doi.org/10.3390/jmse12040628
Chicago/Turabian StyleZhou, Yiming, Xuefeng Zhang, Jianjun Chen, Ruichao Liu, Jili Sun, and Yulin Si. 2024. "Catenary Mooring Length Control for Motion Mitigation of Semi-Submersible Floating Wind Turbines" Journal of Marine Science and Engineering 12, no. 4: 628. https://doi.org/10.3390/jmse12040628
APA StyleZhou, Y., Zhang, X., Chen, J., Liu, R., Sun, J., & Si, Y. (2024). Catenary Mooring Length Control for Motion Mitigation of Semi-Submersible Floating Wind Turbines. Journal of Marine Science and Engineering, 12(4), 628. https://doi.org/10.3390/jmse12040628