1. Introduction
Unmanned surface vehicles (USVs) have garnered considerable attention over the past few decades [
1,
2]. Thanks to their advantages of inherent security, autonomy, and programmability, they have been applied in different types of scenarios, such as transportation [
3], environmental monitoring [
4,
5], marine resource exploration [
6,
7], disaster rescuing [
8], and marine reconnaissance [
9,
10]. In engineering applications, the stable navigation control of USVs is vitally important, and the cornerstone of effective navigation control in USVs is a reliable kinetic model [
11,
12]. However, developing such a model is fraught with challenges stemming from three aspects: the complex underlying physical mechanisms, numerous convoluted hydrodynamic derivatives, and unpredictable external influences. The complicated hydrodynamic principles and numerous coefficients reflect the USV system’s strong nonlinearities and coupling between steering and speed. These factors are strongly coupled to the system dynamics, particularly during USV maneuvers, making it difficult to formulate an accurate, structured model. Additionally, the broad spectrum of USV applications introduces further complexities in modeling, particularly to the internal and external parts of the USV. For example, during water-sampling missions, shifts in the USV’s centre of gravity and balance directly make a marked impact on its motion dynamics. Similarly, variables such as wind, waves, and currents are not only unpredictable but also difficult to measure, particularly in marine reconnaissance missions that extend from day to night. Given these challenges, a sufficiently accurate yet straightforward control-oriented kinetic model, along with the identification of accurate parameters, remains a key problem in the field of USV control and planning theory [
13].
1.1. Contributions
The primary contribution of this study lies in the presentation of the novel grey-box modeling method based on incremental learning and mechanism (GBM-ILM) for USVs. The study revolves around the following summarized ideas:
(1) In contrast to the existing modeling literature, the novel modeling framework of the proposed GBM-ILM can combine the advantages of both incremental learning networks and physical mechanisms. It leverages the LPV mechanism to capture the fundamental laws governing the USV’s kinetics. An incremental learning network is embedded to compensate for inaccuracies and unmodeled parts in the mechanism model caused by unknown, time-varying disturbances. Introducing the incremental learning network, the GBM-ILM can constantly adapt to new environments and situations by increasing network nodes and updating the parameters of the network based on whether the incoming data are new or already learned. As a result, a more precise USV kinetic model can be quickly estimated to adapt to the different states subsequently.
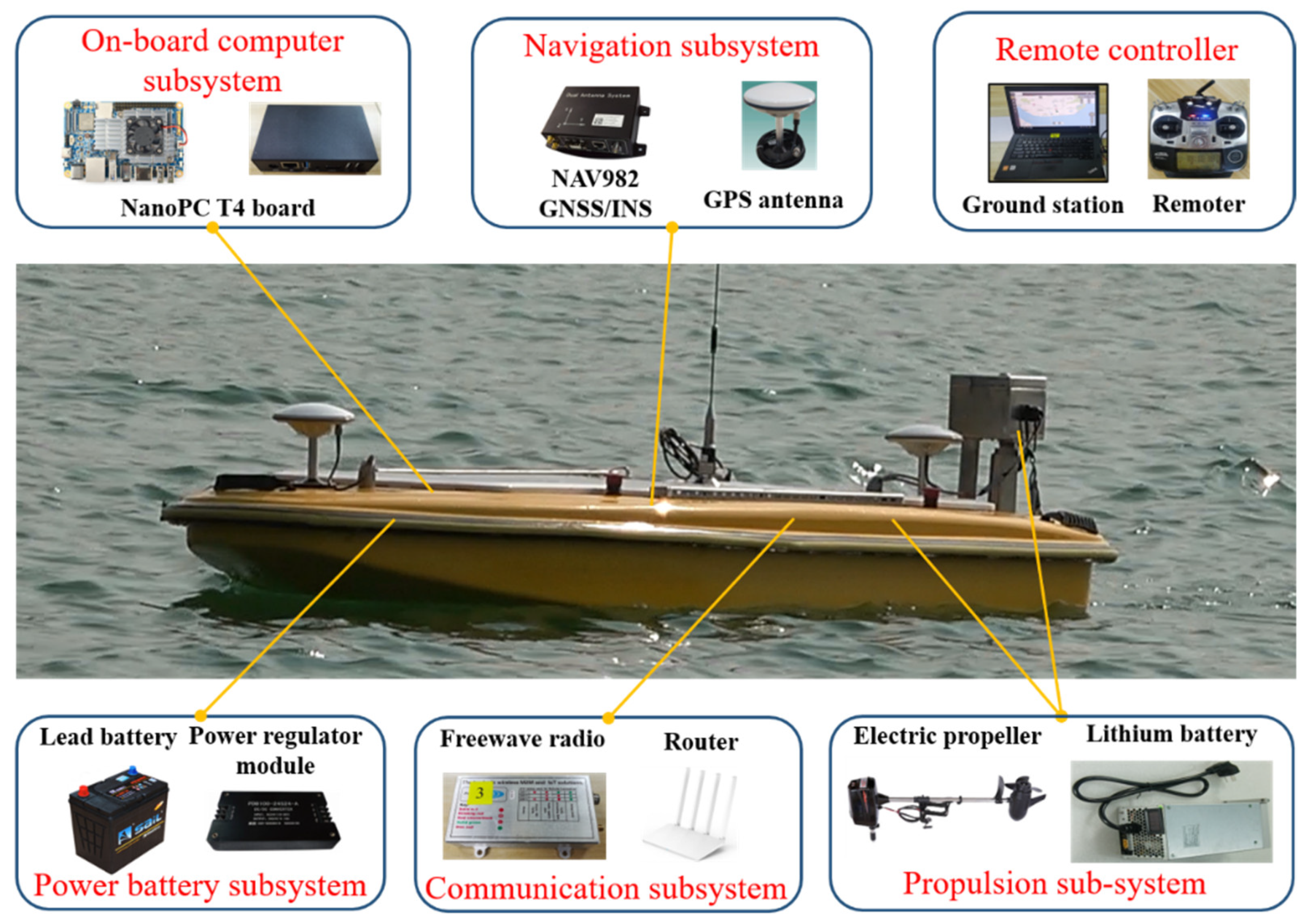
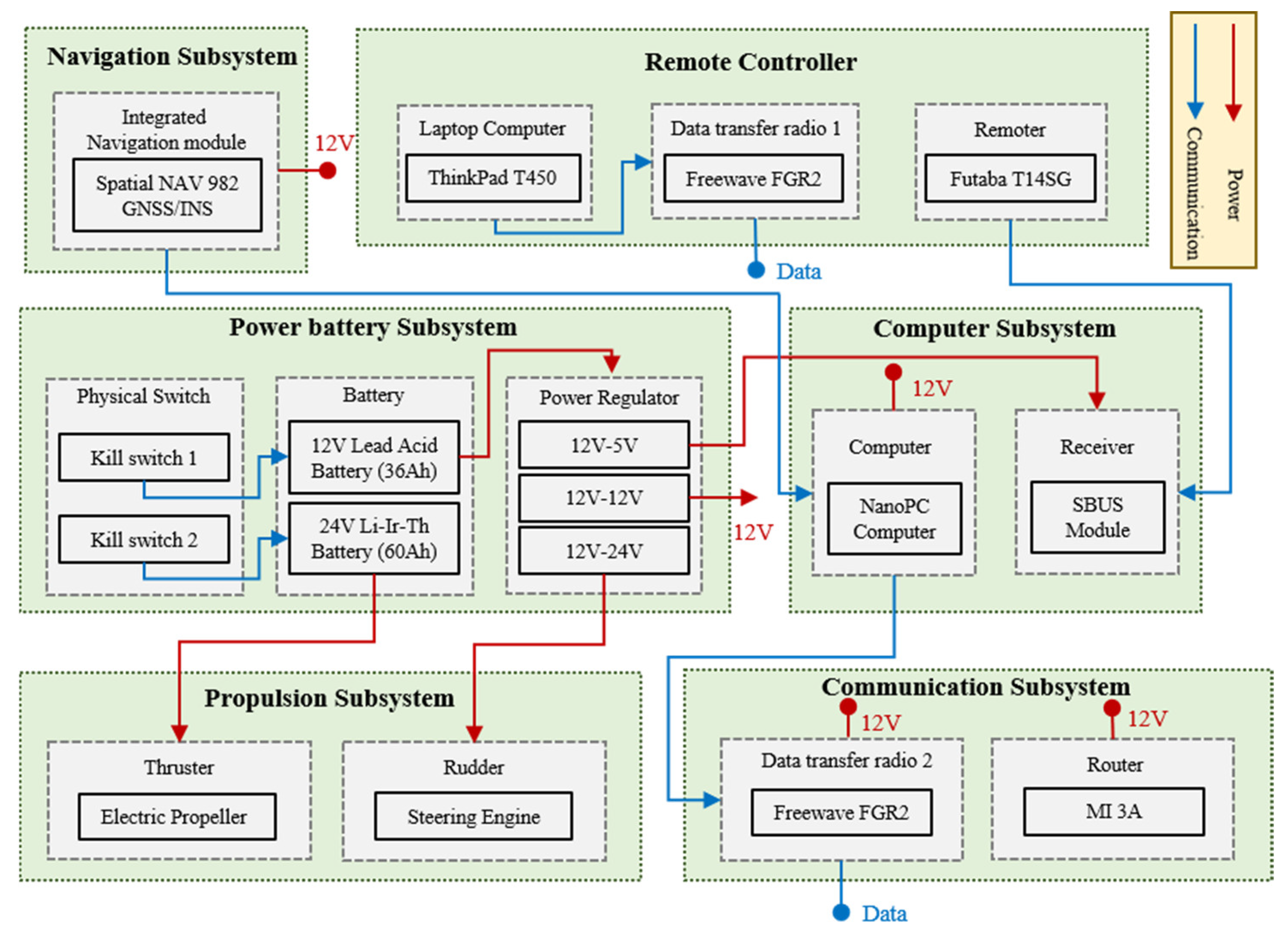
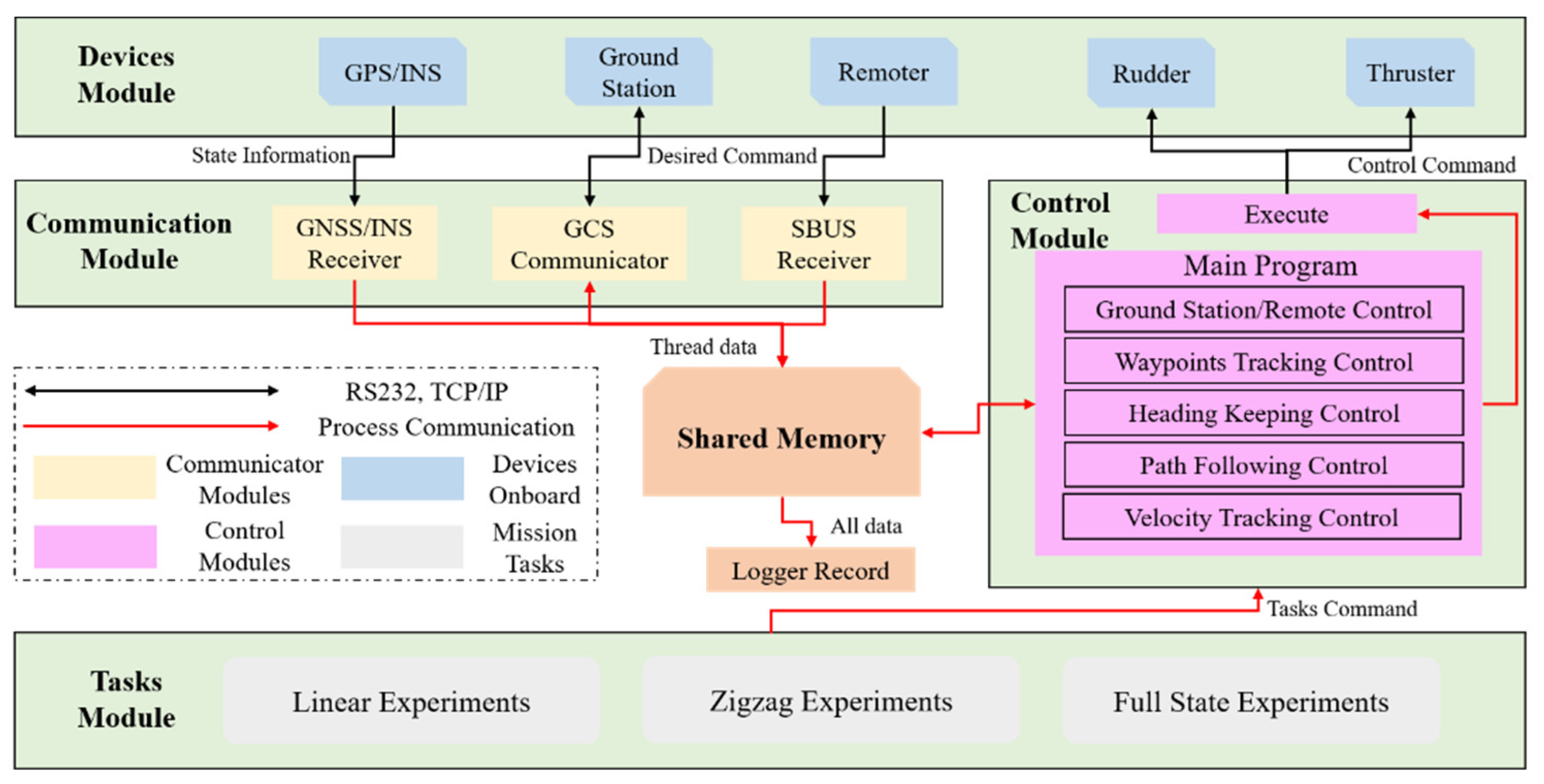
(2) To validate this novel modeling method, we have independently developed the ‘Salmon’ USV experimental platform and conducted groups of system identification experiments in a lake. The USV is equipped with a high-precision integrated navigation system and an automated control system, to guarantee the authenticity, precision, and number of experimental data samples. The efficacy of the method was verified by comparing its performance with other typical and state-of-the-art modeling methods.
1.2. Outline
This study provides a comprehensive overview of the GBM-ILM method, which combines an incremental learning network with a physical mechanism model for learning the USV’s kinetic model. The remainder of the article is structured as follows:
Section 2 introduces the related works on USV kinetic modeling.
Section 3 details the GBM-ILM method, based on the physical mechanism and incremental learning network, to capture the USV’s kinetics. In
Section 4, we introduce the self-developed USV experimental platform and outline the system identification experiments.
Section 5 presents a thorough analysis and discussion of the experimental results, comparing the accuracy and effectiveness with other typical modeling methods. Finally,
Section 6 provides the conclusions and summarizes key findings.
2. Related Works
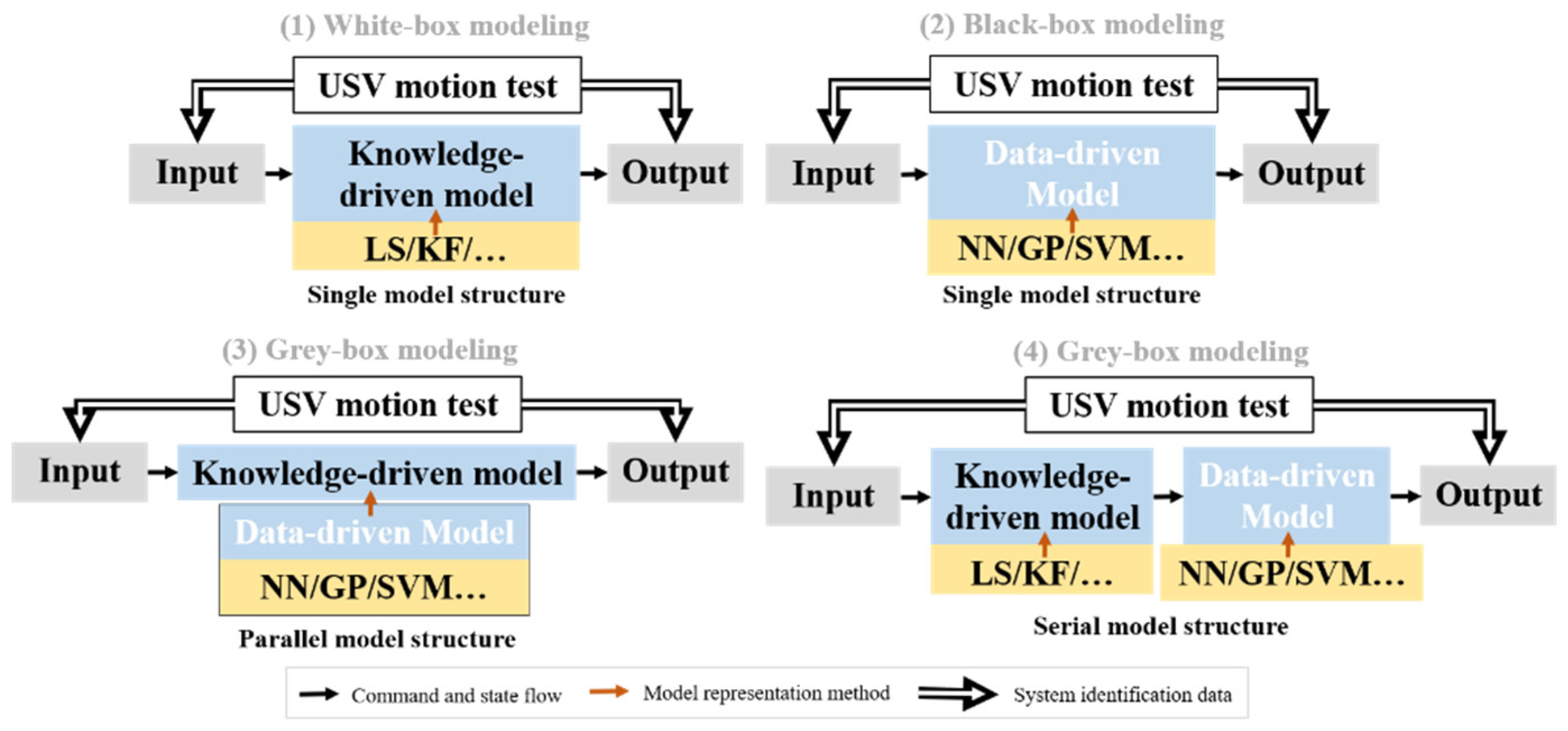
Generally, approaches to system dynamics modeling can be categorized into three types. The first is white-box modeling, also known as a knowledge-driven model, which is shown in
Figure 1(1), where the model’s structure is perfectly delineated based on prior knowledge and physical principles. Here, the reference models rely on well-understood and explicitly defined ‘standard’ equations, and the model parameters are obtained by identification algorithms. The second is black-box modeling, also known as a data-driven model, which is shown in
Figure 1(2), where the systems do not necessarily offer explicit ‘standard’ equations to describe system dynamics. These models are often stochastic and estimated by multiple learning algorithms. The third is grey-box modeling, combining white-box and black-box modeling, which is shown in
Figure 1(3,4). In grey-box modeling, its hybrid structure explores the functional relationships between the input, output, and estimated values (derived from the white-box model) by employing the black-box model [
14,
15].
White-box modeling has been rapidly researched and widely used for a long time. In this approach, models are meticulously crafted based on known kinematic and kinetic theories. These models account for a range of factors affecting a USV, such as hydrodynamic forces, control forces, and environmental disturbances. Notable models in this category include the first-order Nomoto model [
16], the Abkowitz model [
17], a mathematical maneuvering model [
18], the Manoeuvring Modeling Group (MMG) model [
19], and a six degree-of-freedom (six-DOF) nonlinear kinetics model and its deformation models [
20,
21]. The structures of these models are well-defined, and unknown parameters can be obtained by various system identification methods. One of the most popular parameter identification methods is the Kalman filter (KF) [
22,
23] and its variants, such as the extended Kalman filter (EKF) [
24,
25] and the unscented Kalman filter (UKF) [
26,
27,
28]. Another popular method for parameter identification is the least squares (LS) method [
29,
30,
31,
32]. White-box models are typically derived from expert knowledge; however, partial studies tend to oversimplify specific dynamic properties or assume that the USV system operates under time-invariant conditions (in calm waters) [
14,
33]. Furthermore, the model’s effectiveness is often constrained by the researchers’ limited prior physical knowledge of the USV’s dynamic characteristics, as well as their observational capacity during maneuvering. These limitations can compromise the model’s accuracy and adaptability to changes in both internal states and external environmental factors, such as payload variations, structural changes, wind, waves, and currents [
34].
Black-box modeling is an approach for systems whose structures and mechanisms are completely unknown. This method establishes an optimal mapping relationship between input and output data, bypassing the need for any prior physical knowledge of the explicit mathematical model that reflects the system’s dynamic characteristics. Artificial neural networks (ANNs) are commonly employed in black-box modeling [
35,
36], such as two-layer fully connected neural networks [
37], three-layer feedforward neural networks with Chebyshev orthogonal basis functions [
38], generalized ellipsoidal basis function fuzzy neural networks [
39], long short-term memory (LSTM) [
40], recursive neural networks [
41], and deep learning networks [
42]. These architectures aim to map the dynamic relationship between input state variables and output variables such as hydrodynamic force and moment, identifying nonlinear functions in the process. Another prevalent technology in this domain is the kernel-based method, which relies on statistical approaches. This technique maps training data into a high-dimensional feature space using a kernel trick, circumventing the need for physical insight into the system [
43]. By doing so, it more effectively captures the nonlinear relationship between input and output data. In the kernel-based methods, support vector machines (SVMs) and the Gaussian process (GP) have attracted widespread interest. SVMs have been used in various studies [
44,
45,
46]; additionally, a variant of SVM, known as the least square support vector machine (LSSVM) [
47], aimed to minimize both the empirical risk (i.e., estimation error in the training data) and structural risk (i.e., model complexity) [
48,
49,
50,
51,
52]. In contrast, GP regression operates as a Bayesian learning method rooted in kernel functions. Unlike SVMs, which generally excel in limited sample scenarios, the GP provides an intuitive confidence interval for output results, thus offering insights into their reliability. The model produced through GP regression is probabilistic; thus, it has both universality and solvability. The GP has been used in various studies [
53,
54,
55,
56,
57,
58]. However, these kernel-based modeling approaches often lack a strong theoretical underpinning, due to the absence of rational physical laws [
56,
57]. In practical applications involving USVs, the model’s performance is subject to significant uncertainties. This is because both the state of the USV system and the external environmental factors are continually changing, leading to outdated data, exceeding of the model’s applicability, or a loss in efficacy [
59].
Contrary to white-box and black-box modeling, grey-box modeling can synthesize the advantages of both approaches, by not only optimizing the identification coefficients of complex systems but also fully accounting for the mechanism of USV maneuvering. In parallel grey-box modeling, Wang et al. [
15] introduced a grey-box model based on a SVM, utilizing a third-order Taylor expansion as an alternative to the MMG and Abkowitz model structures. However, this model overlooked hydrodynamic coefficients and suffered from extended computation times. Similarly, Mei et al. [
60] proposed a grey-box framework for modeling ship maneuvering using an MMG model, random forest (RF), and a SVM. They employed fewer free-running model test data and utilized the SVM technique to identify the MMG model parameters through a tightly coupled approach. Chen et al. [
61] advanced a four-DOF grey-box model for ship maneuvering based on the MMG model and LSSVM. However, their focus remained solely on the kinetics of the USV, identifying only the relationship between established white-box models and black-box methods. Reference model parameters can be dynamically adjusted using black-box techniques, although these are susceptible to large errors in changeable experimental environments. In serial grey-box modeling, our previous research combined a linear parameter-varying (LPV) model with the UKF to estimate the kinetic model of the USV. The limitation here is that the UKF parameters had to be predetermined and that the model error was assumed to be noise-driven [
62]. Thus, the model had poor adaptability to datasets from different times or mutable environments. A critical research focus in grey-box modeling for USVs is the need for models to adapt to changing environmental conditions and system states in real-time. This is crucial to rationally divide the white and black parts and avoid the existing problems of both models.
The major publications in recent years within the USV modeling research field are listed in
Table 1. Based on the analysis of the above-mentioned literature, simplified mechanism models decrease accuracy due to their omission of uncertainty, while data-driven network models result in errors out of their scope. Additionally, models derived from offline experimental data struggle to adapt to dynamic environments. This is because the offline data are time-invariant and fail to capture changes in the state of the USV, leading to limitations in the models’ generalizability and adaptability. Therefore, there is an urgent need for an intelligent method that can dynamically and accurately estimate the USV kinetic model online, while considering uncertainties and changes in both the internal USV systems and the external environment.
Inspired by previous studies, this study introduces a novel grey-box modeling method that combines incremental learning with a mechanism model. This approach actively calculates model errors in real-time, identifying them as unmodeled parts. Simultaneously, to ensure adaptability to time-varying environmental conditions and USV states, it fits these model errors using an incremental learning network, which can continuously update both its structure and parameters by iteratively incorporating new data. This compensates for the shortcomings of the mechanism model and improves the overall modeling accuracy. The heart of the incremental learning network is the kernel recursive least squares with approximate linear dependency (KRLS-ALD) algorithm [
63]. This algorithm solves the nonlinear inseparability problem by projecting input data into the reproducing kernel Hilbert space. This enables the establishment of a quick and accurate online model adaptable to changing conditions. The approximate linear dependency (ALD) formula can determine whether the input data are new to the incremental learning network model [
64]. In summary, this study not only makes the USV kinetic model interpretable but also determines the boundaries for model errors. Building on this foundation, it estimates and compensates for model error using incremental learning, thereby enhancing the precision of USV dynamic modeling. The main parameters in the article are explained in
Table 2.
3. The Grey-Box Modelling-Incremental Learning and Mechanism (GBM-ILM) Method
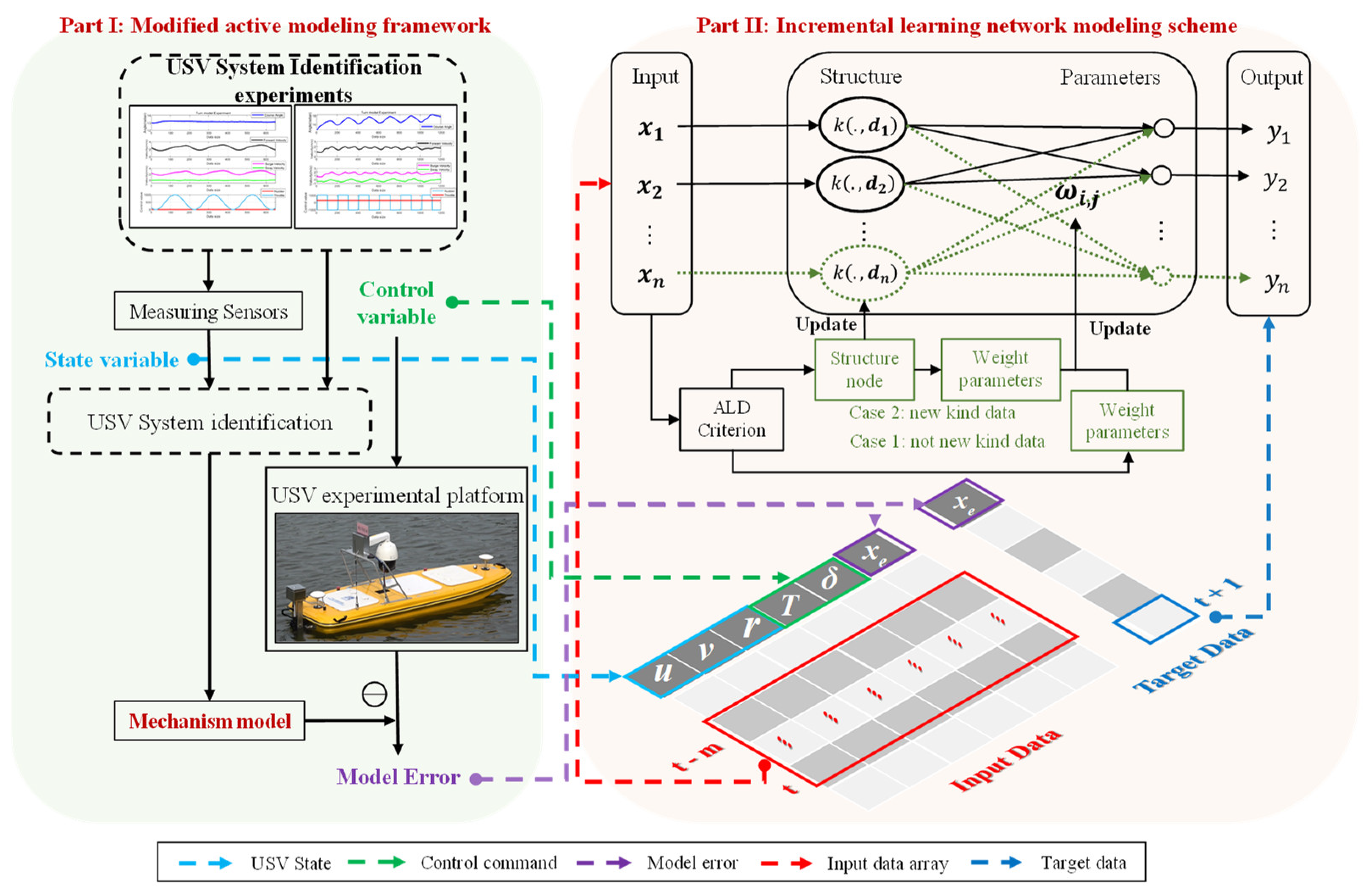
We propose the GBM-ILM method with a novel hybrid modeling framework, outlined in
Figure 2, which aims to guarantee both the physical rationality and accuracy of the USV kinetic model. The flow graph of this modified active modeling and incremental learning network based on KRLS-ALD is divided into two parts. In Part I, we introduce a modified active modeling framework, where a structured model is fixed, building on previous research in
Section 3.1. The onboard computer and operator can relay desired commands to drive the practical USV system. Simultaneously, multiple sensors attached to the USV continuously measure real-time position and attitude data, the mechanism model also estimates an idealized USV state obtained, and the unforeseeable model error is calculated in this framework, as described in
Section 3.2.1. Part II delves into the KRLS-ALD network model, which fits and estimates the model error from Part I. The parameters and structure of this network model are designed to be incrementally updated, as described in
Section 3.2.2. This network model can update its structure and parameters by learning new kinds of data from changeable environments and USV states. The dotted line of each color describes how training and testing datasets are transferred from the active modeling framework to the network model. This method provides the USV states, USV control commands, and model errors as input data, with the model error serving as the target data for network training. The input dataset comprises either a set of synchronous values or a series of consecutive historical moments, as described in
Section 3.2.3. With the training of this network model, its ability to predict the model error is gradually enhanced; this incremental learning strategy thrives even with limited samples, unlike other traditional machine learning theories, which rely on large sample sizes. As both the USV system and its environment change, the amount of data increases, and the network model keeps constantly updating.
3.1. Unmanned Surface Vehicle (USV) Mechanism Model
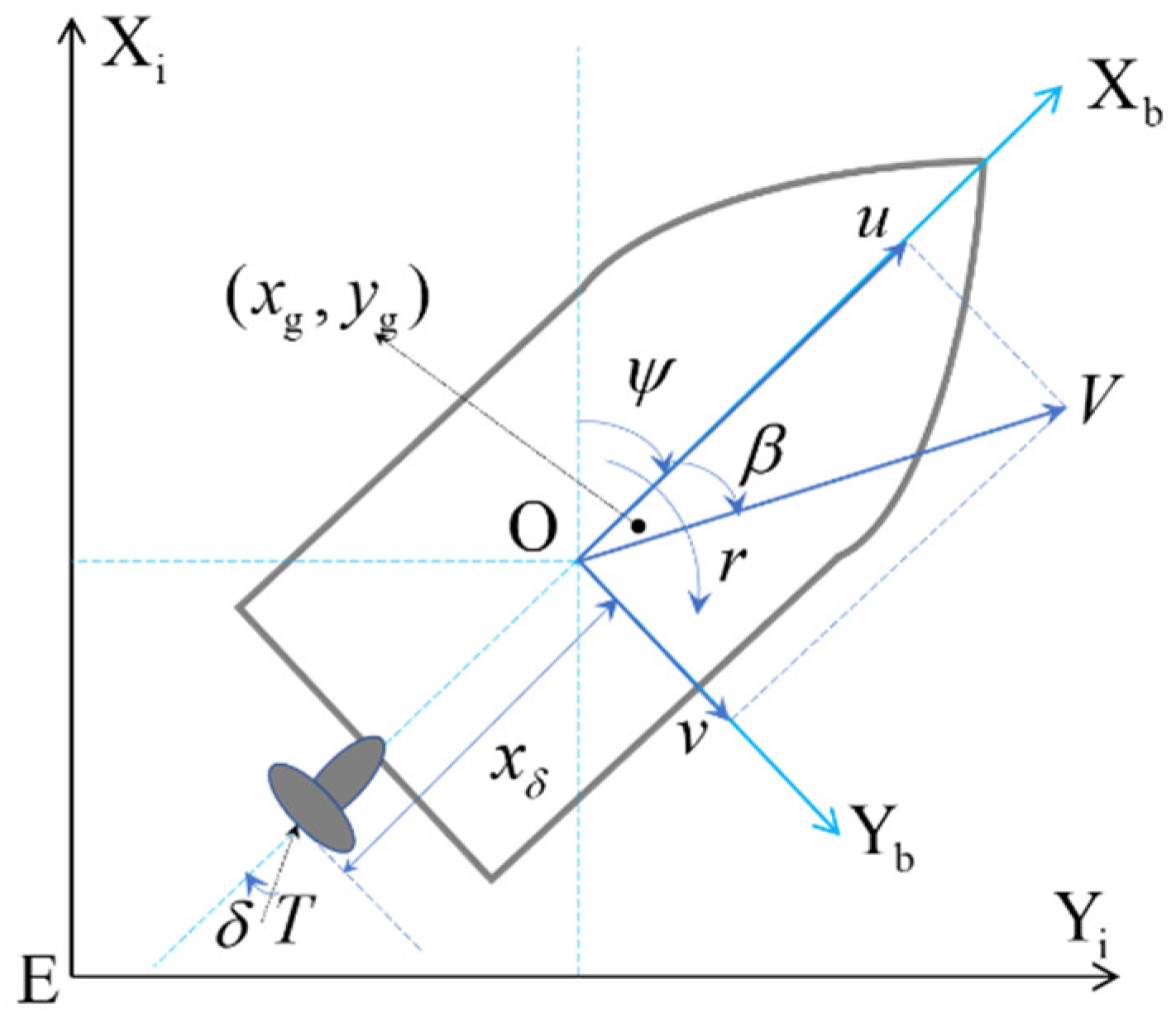
Generally, USV kinetics are commonly defined as surge, sway, heave, roll, yaw, and pitch, as enacted by the Society of Naval Architects and Marine Engineers (SNAME). In this study, to streamline our analysis, we focus solely on three-DOF—surge, sway, and yaw—to describe the USV’s horizontal planar motion, neglect heave, roll, and pitch motions; the USV coordinate frames are illustrated in
Figure 3.
3.1.1. Basics of Unmanned Surface Vehicle Modeling
According to [
21], the detailed three-DOF kinetic model for a USV is as follows:
On the USV, external forces are divided into two sections: hydrodynamic forces and thrust forces. The resultant forces in the surge, sway, and yaw are dependent on the USV motion states, the forces, and torque produced by the thruster. These can be described using the following equations:
where
,
, and
are hydrodynamic forces, while
,
, and
are thrust forces. The resisting forces and torque can be represented using polynomial equations [
65], which are given in
Appendix A. Generally, USVs are designed with lateral symmetry, by letting
,
, and substituting Equation (2) into Equation (1) allows us to rewrite Equation (1) as follows:
where
,
.
Obviously, the thrust force equations are derived as follows:
Thrust
is a function of the forward velocity
(
) and propeller speed
[
20], as follows:
where
is the propeller throttle value, and
,
,
, and
are constants.
3.1.2. Thrust and Steering Models
This section introduces two prominent linear models. In many existing studies, a linearized model serves as an approximation to describe the dynamics of the USV system. In the forward motion condition, we assumed that the yaw rate
, the sway velocity
, and the forward velocity
[
62]. Equation (3) can be linearized as follows:
where
is a reduced matrix that replaces
, as follows:
It is worth noting that the surge motion can generally be decoupled from the sway–yaw subsystem when the forward speed remains constant or changes within a limited range. Thus, Equation (6) can be readily linearized in its perturbed form as follows:
where
,
, and
is the constant thrust force of the USV; other coefficients, namely
and
, are given in
Appendix B.
The Nomoto model can be described as follows:
where
,
,
, and
.
The relationship between
and
can be described as a simple function [
16], as follows:
When the USV’s heading suffers minor perturbations, the sideslip angle
. Assuming that the forward velocity remains unchanged and the yaw perturbations are small, the resultant thrust
acts in the direction opposite to the resultant velocity
. Under these assumptions, the dynamics of sway are formulated as
. Letting
and
, we obtain the following:
where
and
. By combining Equations (11) and (12), a fully linearized steering model is obtained, as follows:
Equation (13) is known as the linear model (Nomoto), considering sideslip motion.
3.1.3. Linear Parameter-Varying Model
According to the existing literature [
66], an LPV system is usually defined as a linear system with state-space representations that depend on some external variable
. The system can be described by the following equation:
where the scheduling variable
is a priori unknown but can be measured online. If the function
contains states from the state vector
, then Equation (14) is called an LPV model [
67]. In other words, LPV systems consist of an indexed collection of linear systems, where the indexing parameter is endogenous, as it depends on the system’s state.
The nonlinear model of the USV system, as shown in Equation (6), includes many parameters that are strongly coupled and difficult to identify through real-world experiments. Extracting the nonlinear structure of the USV system for conversion into an LPV form proves difficult. In this section, we re-analyze Equation (6), to show that it can be transferred into the following LPV format:
where
,
, and
.
The LPV model structure represents an alternative formulation of the physical system model for the considered hydrodynamics of the USV. Its key advantage lies in presenting the nonlinear system structure in a form akin to a special type of linear structure, offering the following two benefits: (1) its parameters can be identified using linear algorithms, thereby yielding a nonlinear mathematical model, and (2) well-established linear control synthesis techniques can be applied and adapted to achieve satisfactory performance.
3.2. Incremental Learning Model
3.2.1. Modified Active Modeling Framework
While three-DOF kinetic models offer a certain level of insight, achieving precise parameter values remains challenging, due to their time-varying characteristics and the inherent uncertainty involved. To address these issues, this study employs an active modeling technique to estimate the model error, treating the unstructured factors in the USV system. The active modeling framework regards these unstructured models as unknown disturbances, obtaining them through an online estimator. Numerous studies validate the effectiveness of active modeling in real-world system control. The main idea of the active modeling technique is the description of a system, using the following system equation:
where
is the state of the system;
is the input of the system;
is the nonlinear structured model function; and
is the model error vector, which includes all the factors of the unstructured model mismatch (i.e., model imprecision and external disturbances) and may relate to the system state
or even the control input.
In this framework, Equation (16) is combined with a predefined structured model and unstructured model errors to describe the dynamic characteristics of the system under control. The structured model serves as the foundation for designing a nominal controller, while the estimated model error can be combined with adaptive schemes to improve the closed-loop performance of that controller. To obtain the model error, we rewrite the system Equation (15) to conform to the state-space format of Equation (16), as follows:
where
is the system state vector,
represents the structured system dynamics as shown in Equations (15), and
is the model error.
3.2.2. Kernel Recursive Least Squares–Approximate Linear Dependency (KRLS–ALD) Algorithms
In the context of the incremental learning method, we employed a simplified form of the RLS algorithm to minimize the sum of the squared errors at each time step [
63], as follows:
where
is the USV state input, and
is the prediction vector. The kernel function is utilized as
, wherein
is the central vector of the network,
maps
into a higher-dimensional Hilbert space, and
, within considering the residual component vector.
Typically, we would minimize Equation (18) with respect to
and to obtain
, where
denotes the pseudo-inverse. The classical RLS algorithm, as described by [
68], leverages the matrix inversion lemma to minimize the loss
online, eliminating the need to recompute the matrix
at each step.
It is worth noting that the feature space could have very high dimensionality, which makes matrix manipulations computationally intensive, especially for matrices such as
. However, as can be easily verified, the optimal weight vector can be expressed in a more tractable form, as follows:
where
. Substituting this into Equation (18) and altering the notation, we obtain the following equation:
where
. The optimal solution to Equation (20) is given in
Appendix C.
In order to adapt to dynamic changes in network structure, we integrate ALD criterion into the kernel recursive least squares (KRLS) algorithm [
64]. For the approximate linear dependency (ALD) formula [
69], assuming that the USV obtains
, and dictionary is
, the number of nodes is
.
We consider one of two scenarios in an online scenario at each time step, as follows:
(1) is the ALD on , i.e., and . In this case, , , and .
(2) , and, therefore, is not ALD on . is added to the dictionary, i.e., , , and grows accordingly.
The KRLS update equations derived are given in
Appendix D.
For the final equality, we use
. The network prediction output about state
can be normalized as follows:
3.2.3. Model Error Prediction
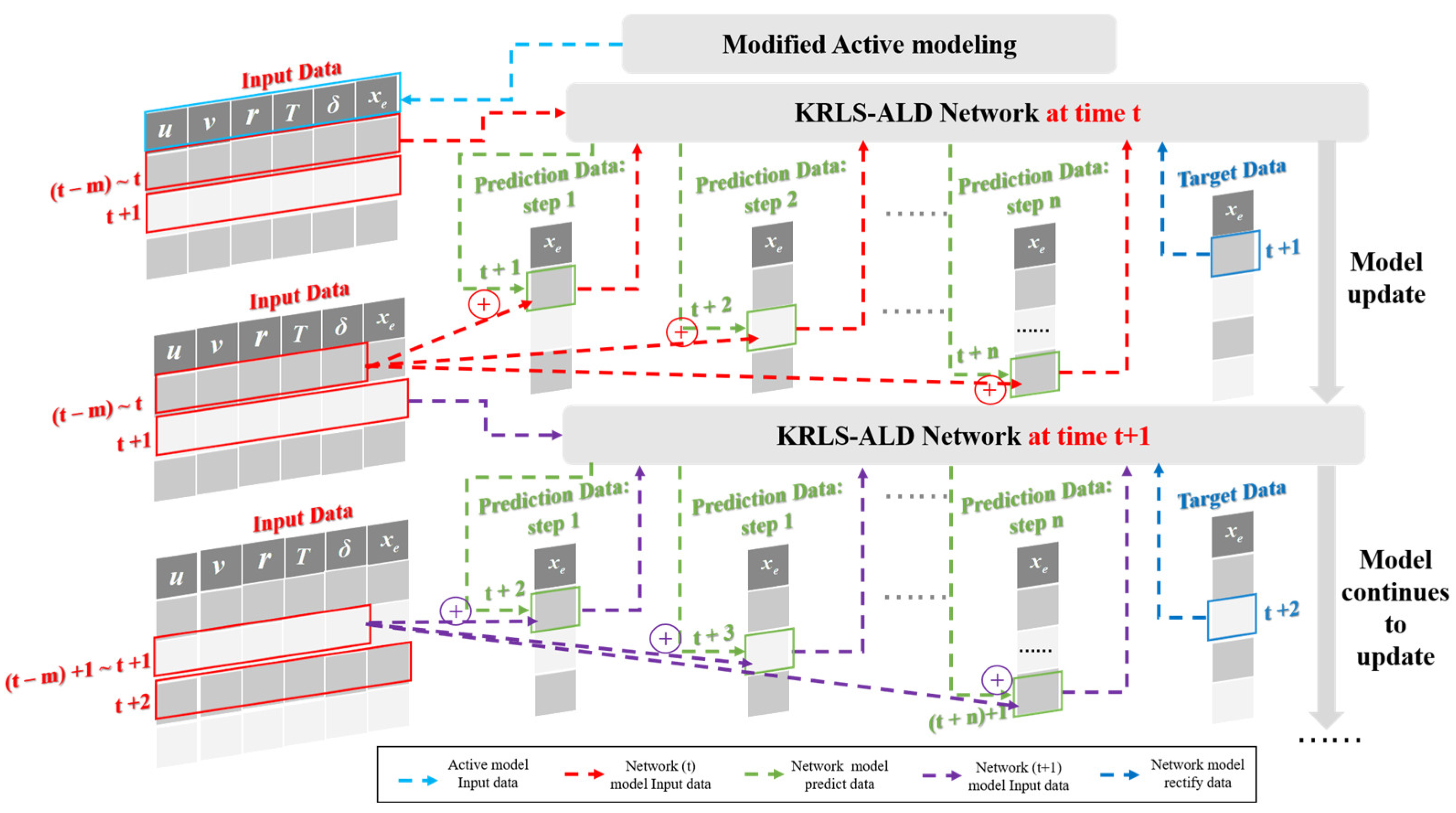
In this GBM-ILM method, the network can estimate model errors by means of iterative prediction. As shown in
Figure 4, firstly, at time
, the input data are obtained from the active modeling framework; it predicts
at time
using the network model in the inner loop. Secondly, in the same step, the network iteratively predicts
for the next time step until it reaches time
. Finally, the actual value at time
serves to adjust the network. Using this flow, the network model can predict model errors in future time, thereby estimating the entire USV’s kinetic model, which can be put into navigation and control.
Through Equation (22), the model error prediction function is undertaken as follows:
where
, and the input data include USV’s state
, control input
, and model error
, which all come from the system identification experiments on the USV platform, as described in
Section 4.
6. Conclusions
In this article, we introduced GBM-ILM, a grey-box modeling method that combines incremental learning with a mechanism model to accurately identify a USV kinetic model. This combination obtains physically plausible kinetic models while also offering a more feasible and accurate estimation of the unknown components of the kinetic model. As a simplified three-DOF LPV planar model developed to describe the planar dynamics of the USV, it features a simple structure that adeptly approximates the nonlinear hydrodynamic behaviors. To address discrepancies between the LPV model and the real system, we devised an active modeling framework that provides online estimation for the unstructured components of the model. Furthermore, the GBM-ILM utilizes the KRLS-ALD algorithm to incrementally estimate and predict residual errors in the kinetic model.
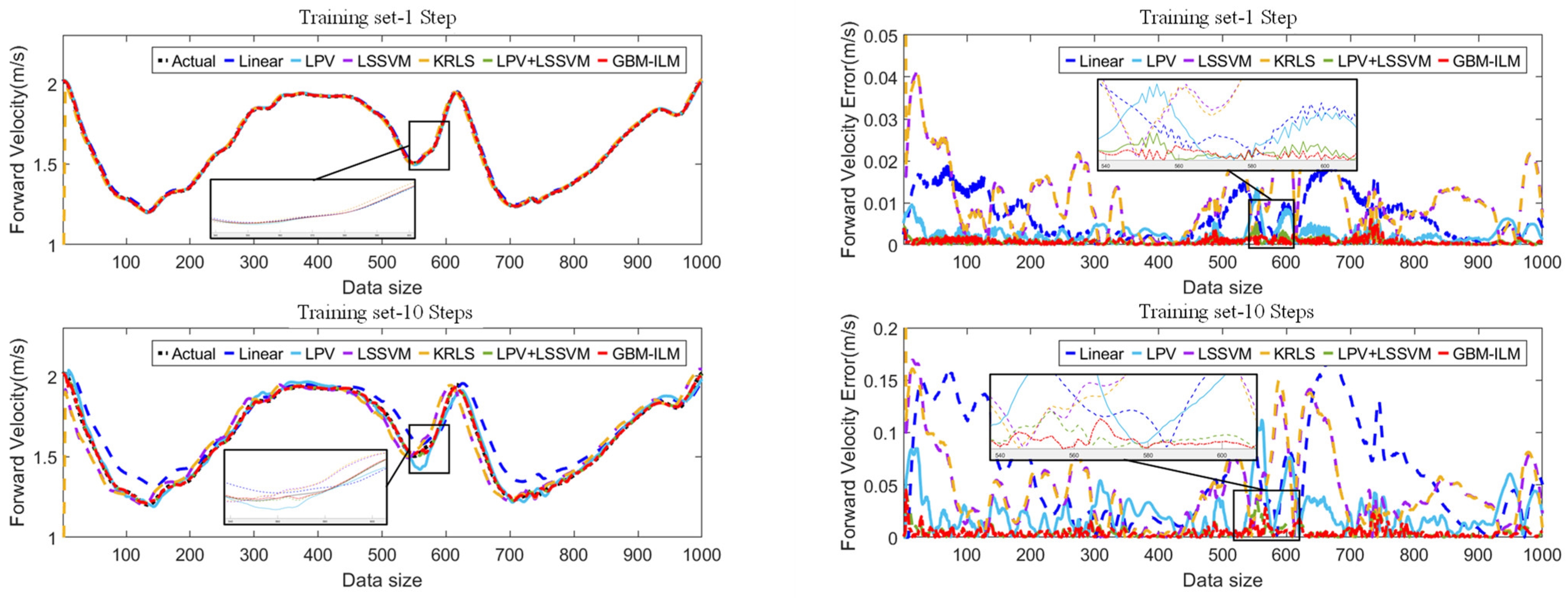
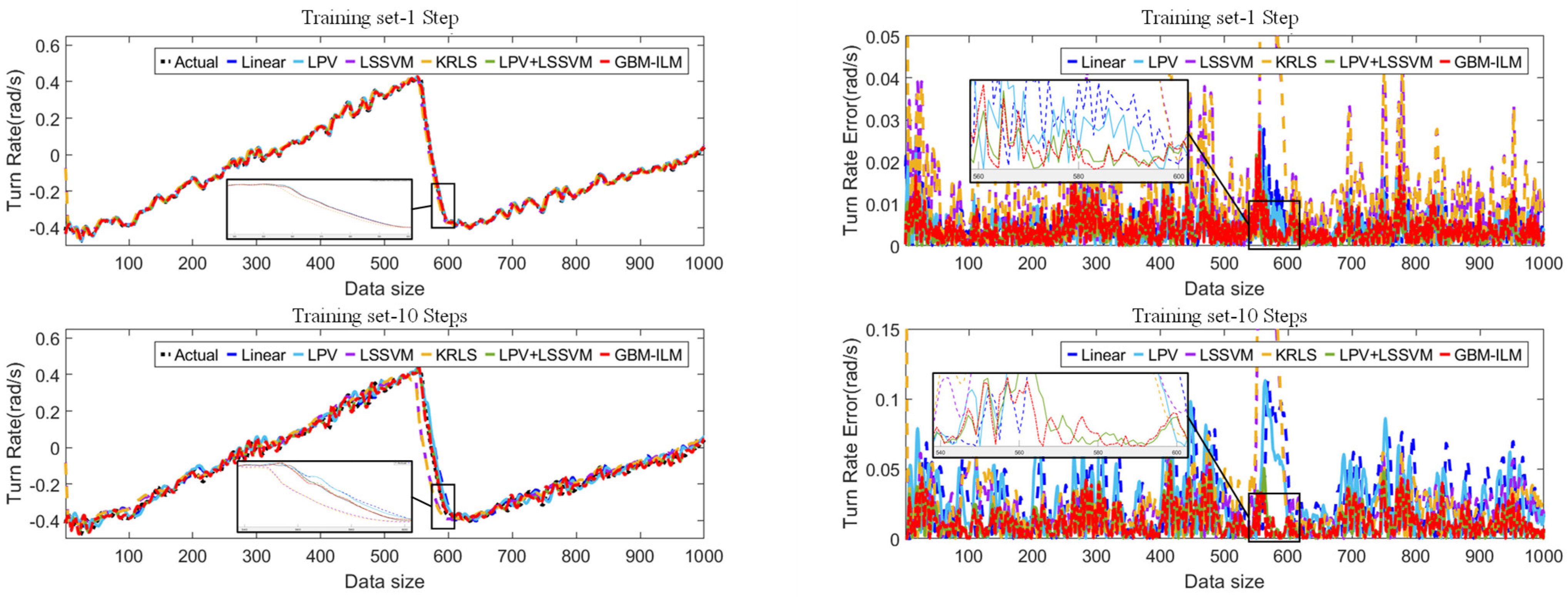
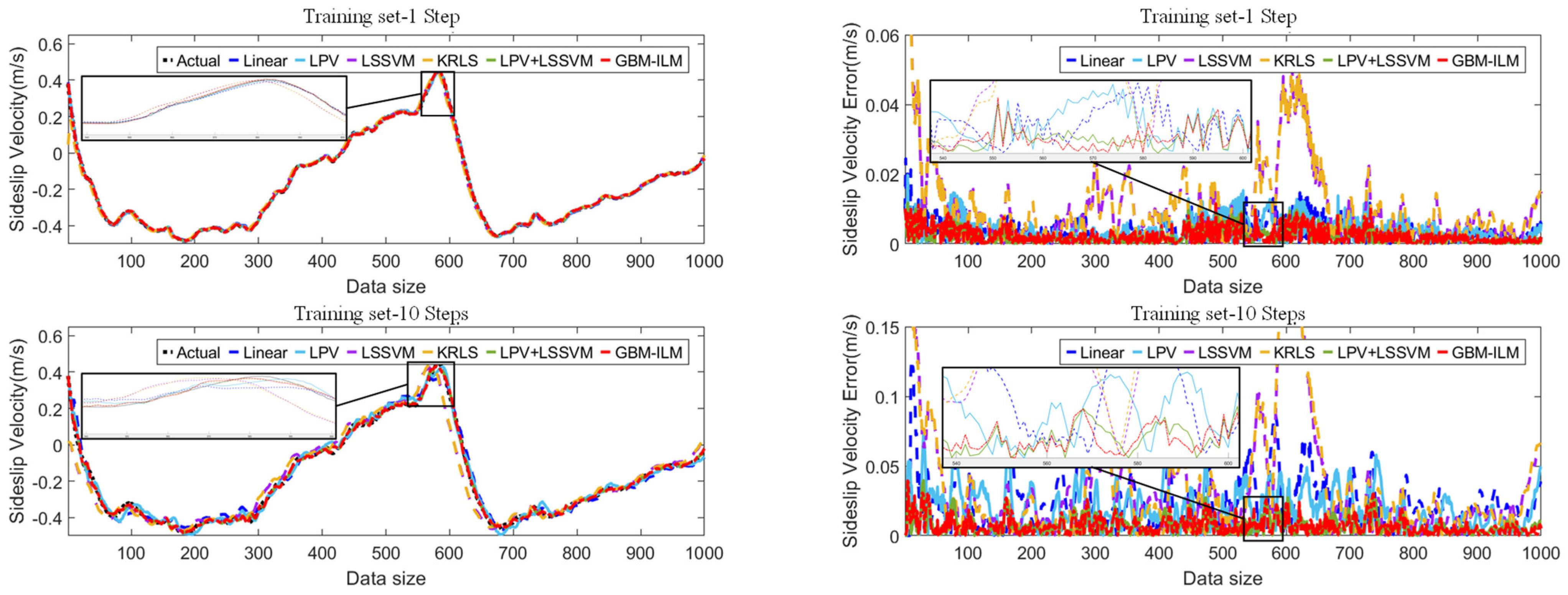
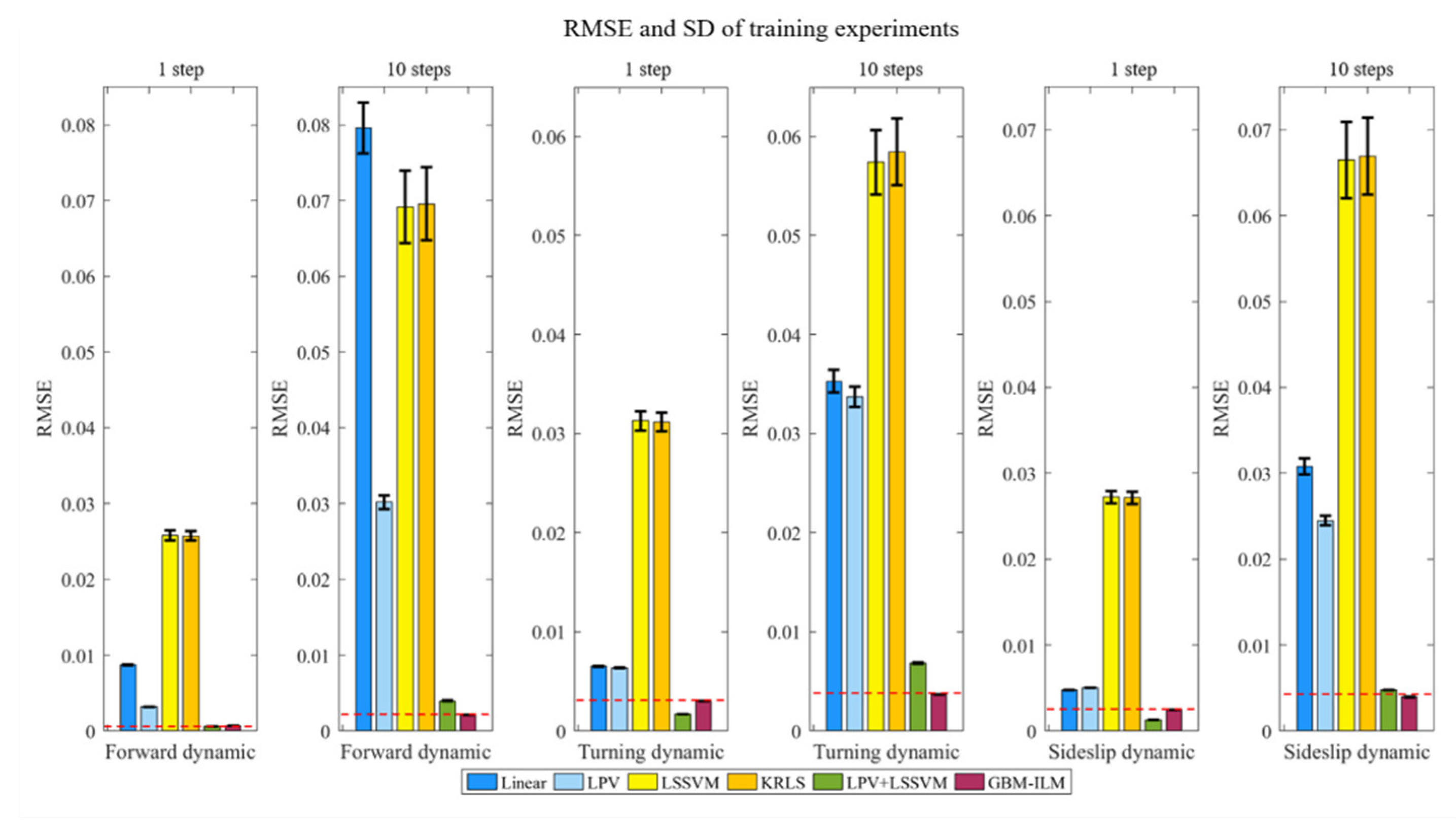
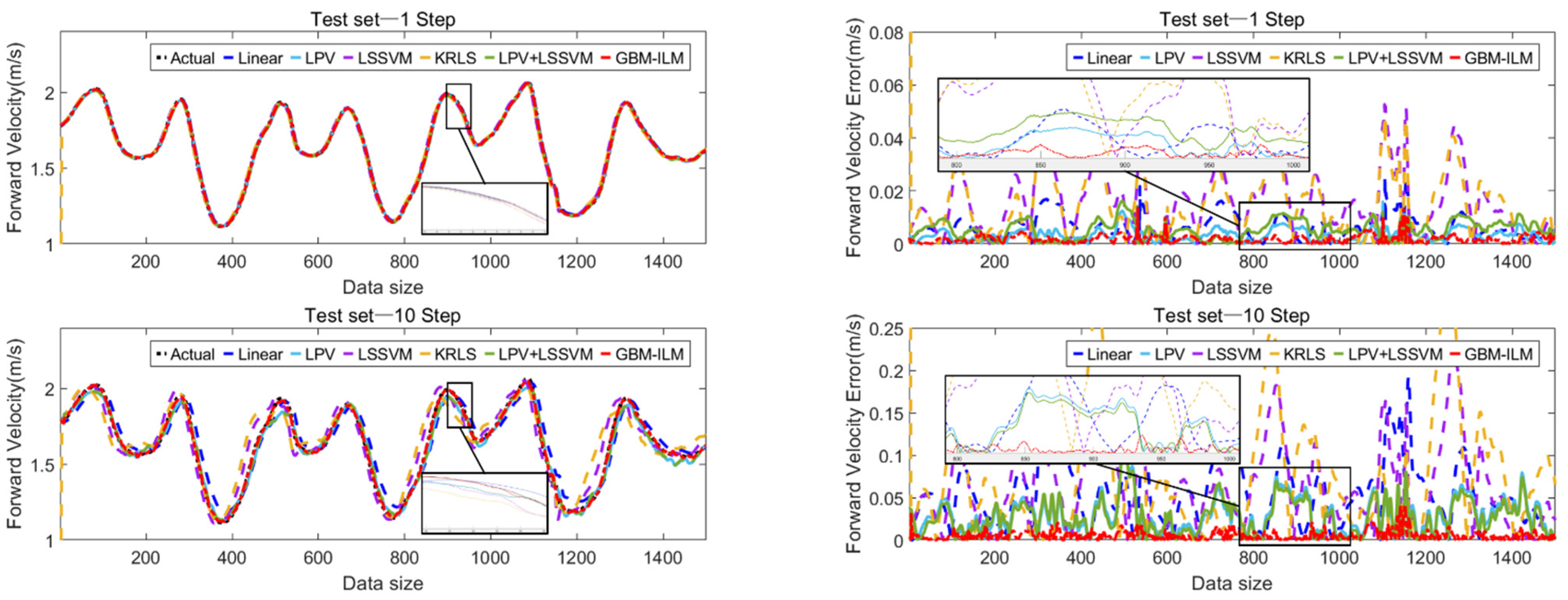
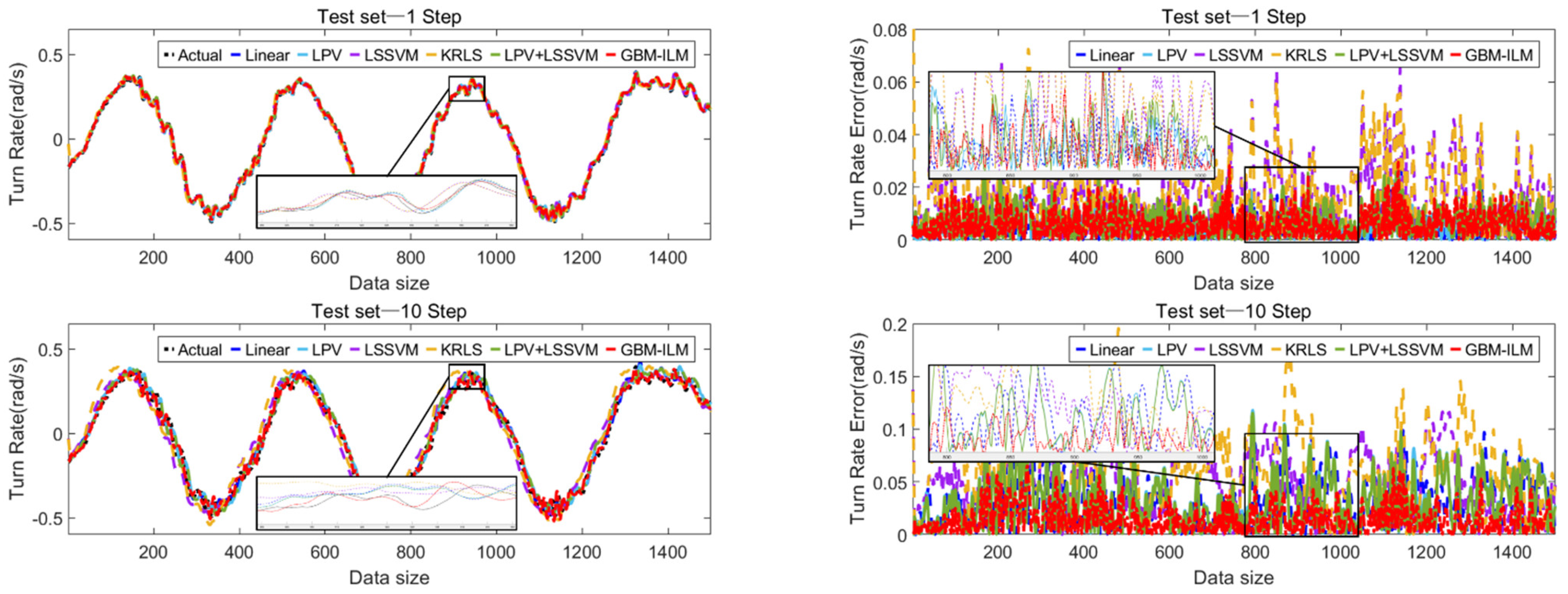
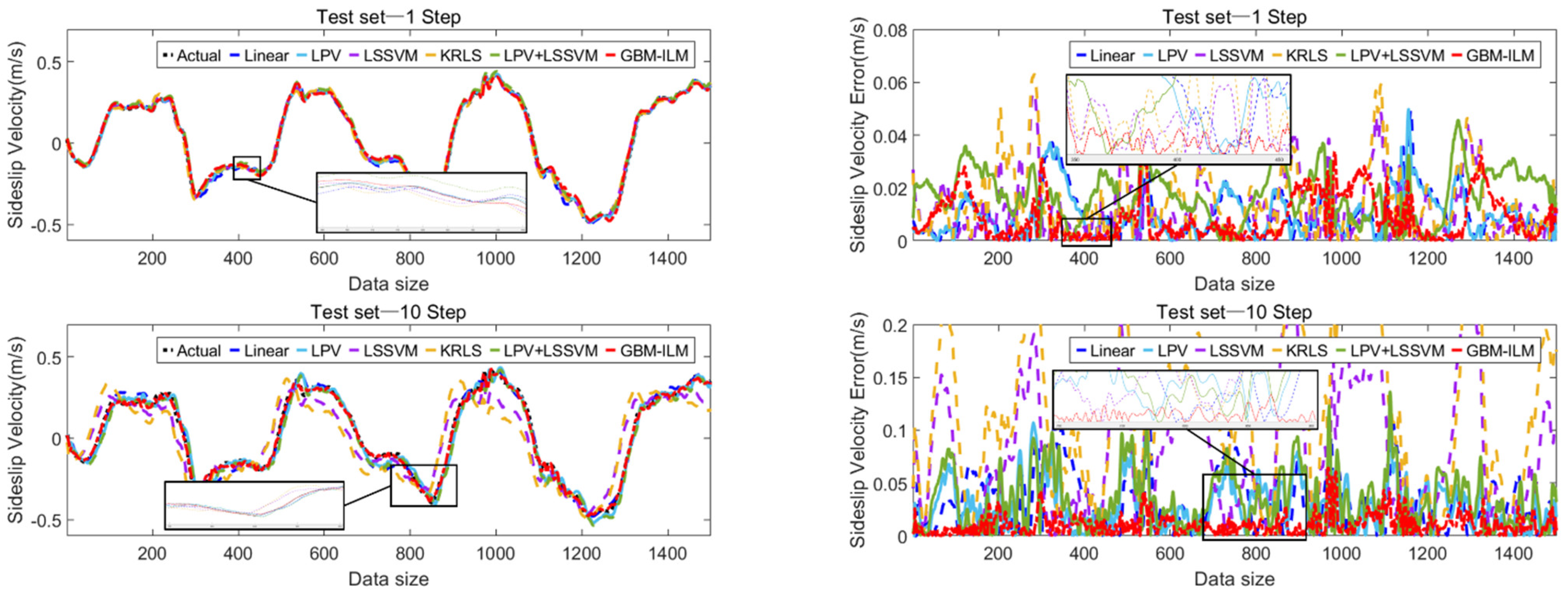
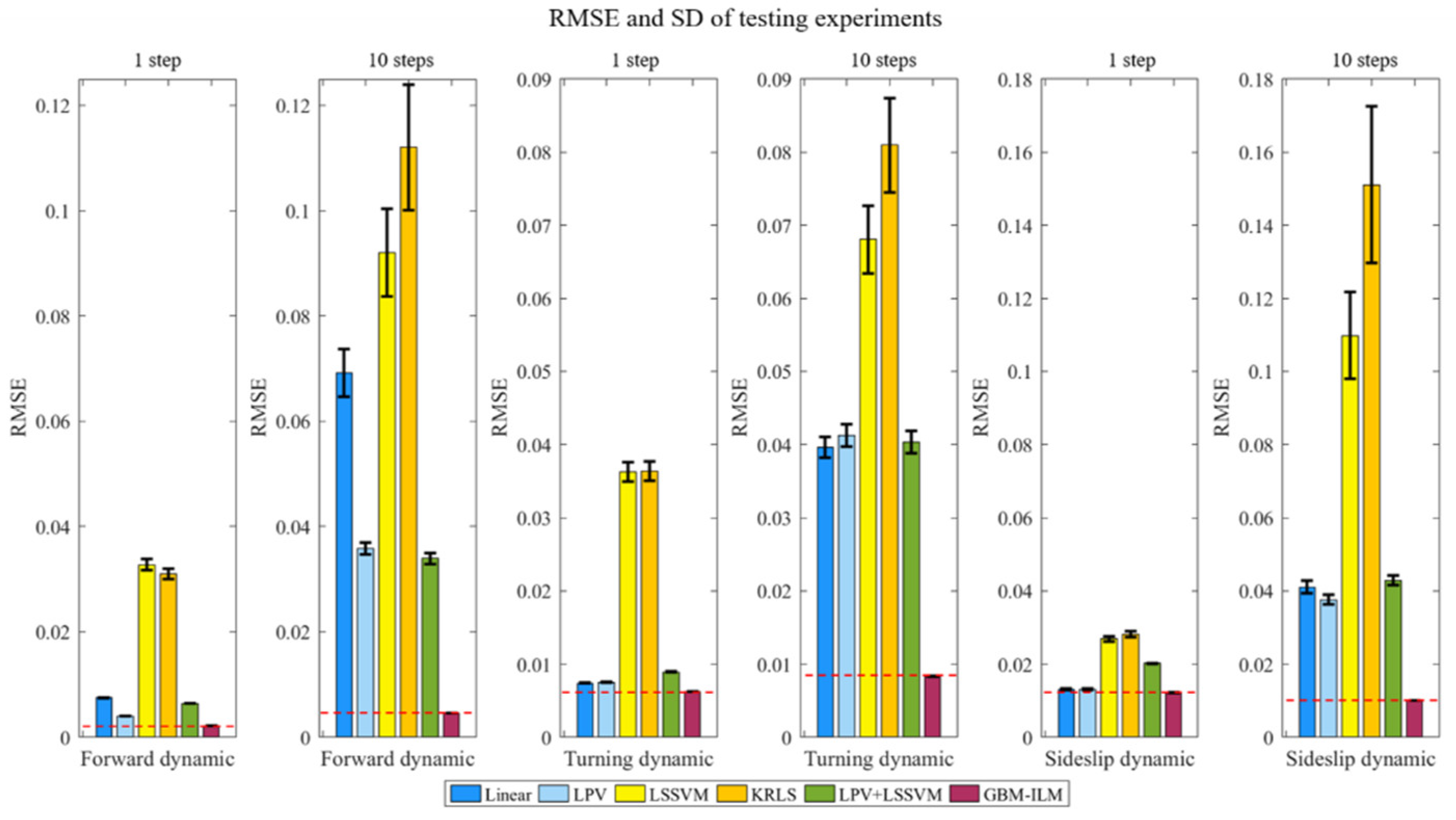
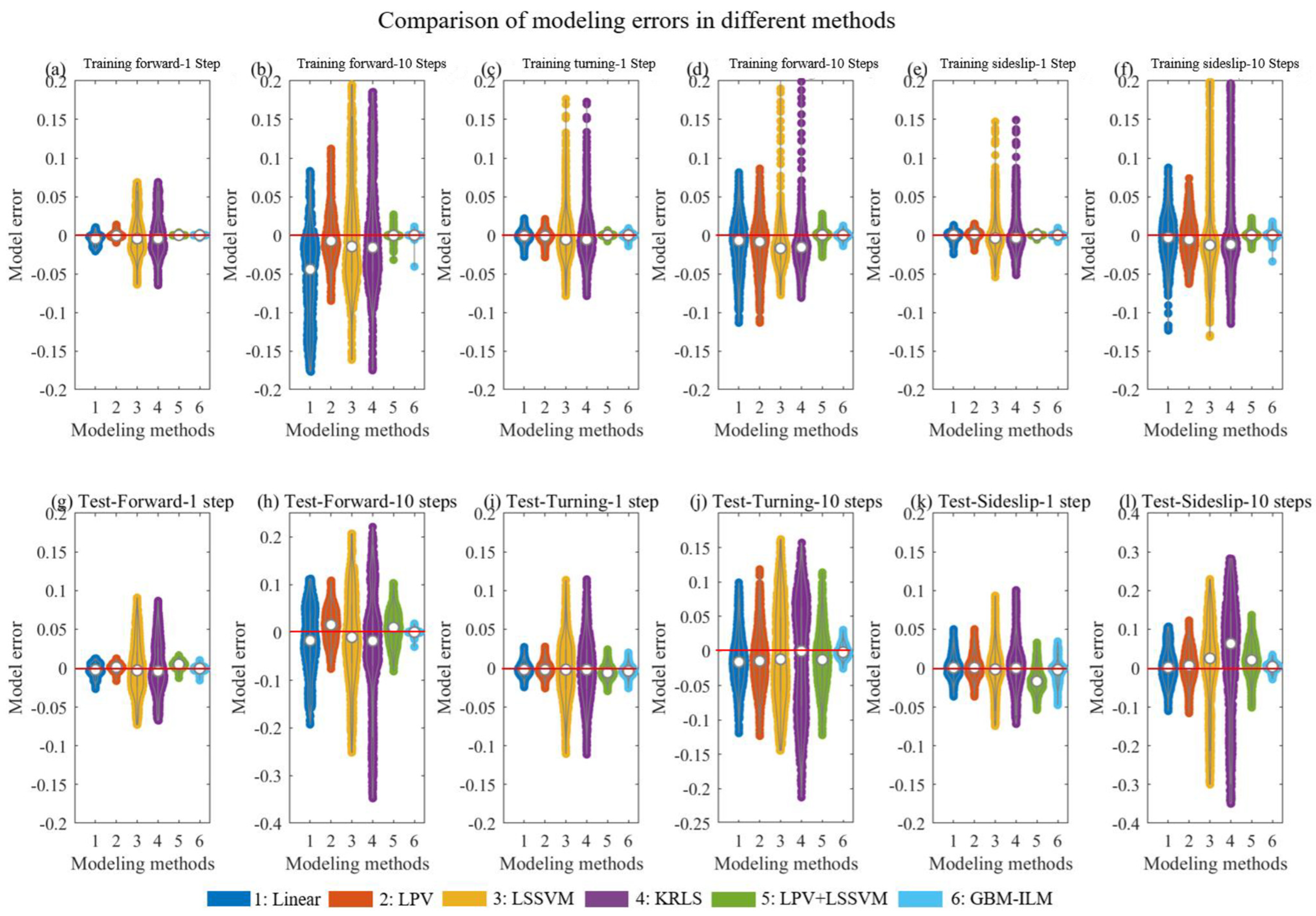
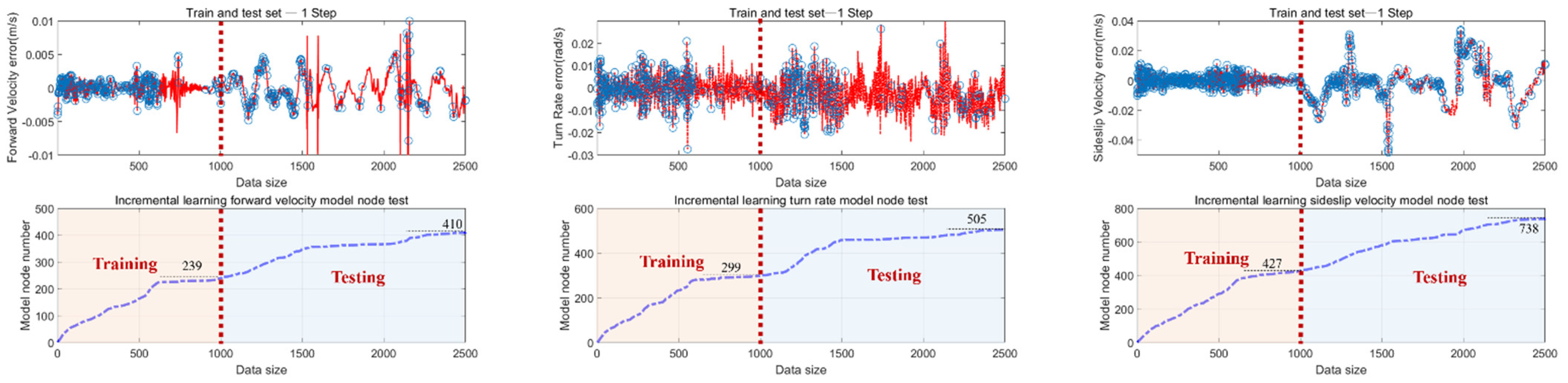
The efficacy of our resulting model was thoroughly evaluated through tests on a real USV system. For this, our research group developed a specialized ‘Salmon’ USV experimental platform and conducted identification tests in a reservoir under conditions classified as a sea state degree of two. Experimental data were meticulously selected for both the input and output data, enabling us to show the superior performance of our approach in predicting the kinetic model online, in comparison to other typical modeling methods. Compared to the LPV with LSSVM method (which performs best among the typical and state-of-the-art methods) from tests at 1-step, the GBM-ILM method improves by 46.34%, 14.86%, and 6.87% in accuracy when estimating the USV’s forward, turning, and sideslip dynamic models, respectively. The error ratios of the test data are 0.11%, 1.26%, and 3.05% of USV model states for the forward, turning, and sideslip dynamics, respectively.
Looking ahead, based on the GBM-ILM proposed in this study, the USV state after 0.5 s would be predicted under the premise of ensuring the model accuracy. Our future research will focus on the development of USV control systems.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}