
Study on the Adsorption Performance of a Vortex Suction Cup under Varying Diameters of Underwater Structure Tubes


Abstract
:1. Introduction
2. Vortex Suction Cup and Adsorption Gap
2.1. The Proposed Vortex Suction Cup
2.2. The Adsorption Gap of Vortex Suction Cup
3. Computational Fluid Dynamics (CFD) Simulation
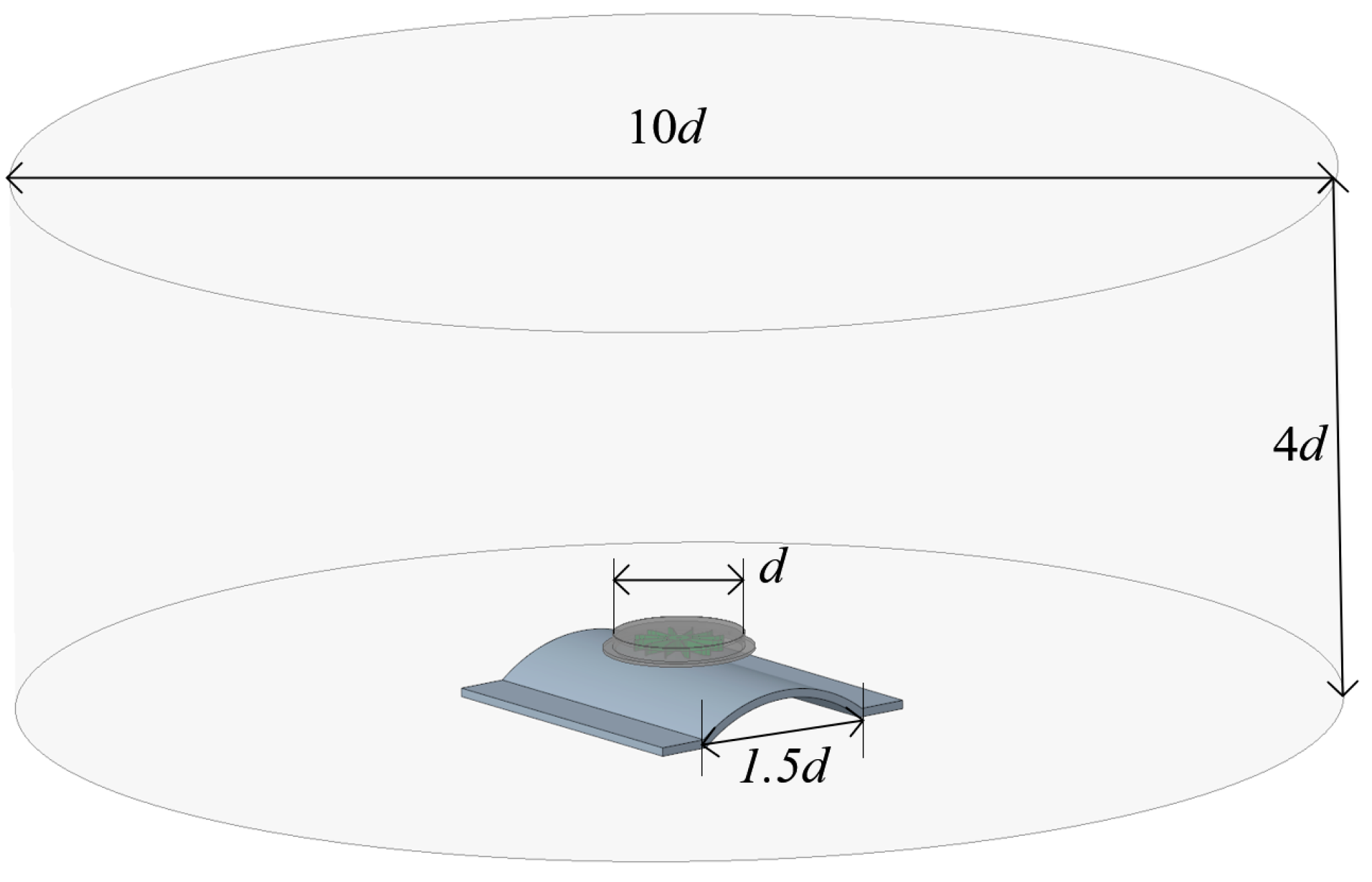
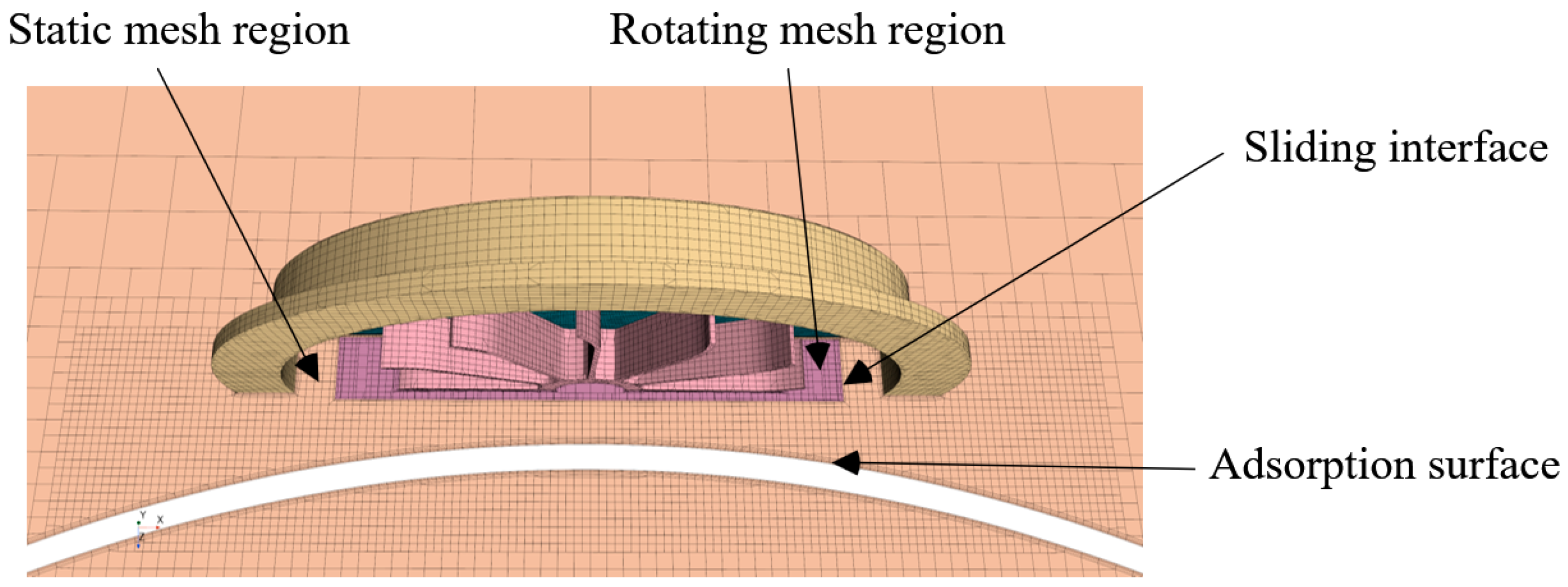
3.1. Simulation Setup
3.2. Simulation Flow Field Observation
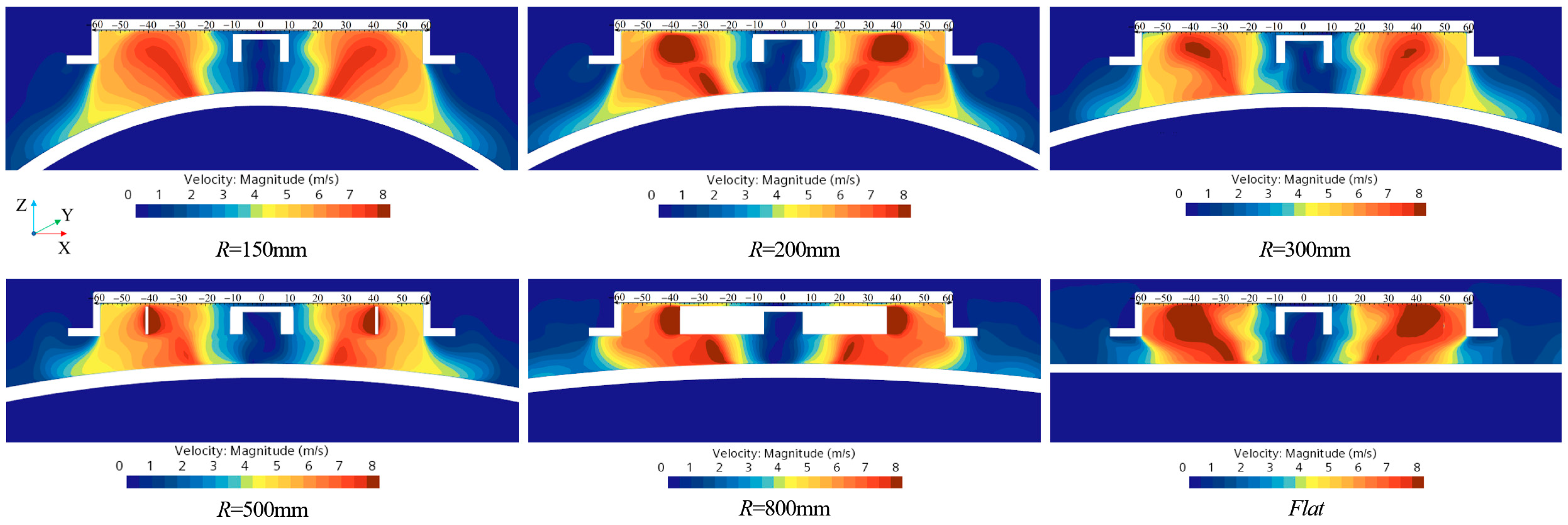
3.2.1. Flow Velocity Distribution
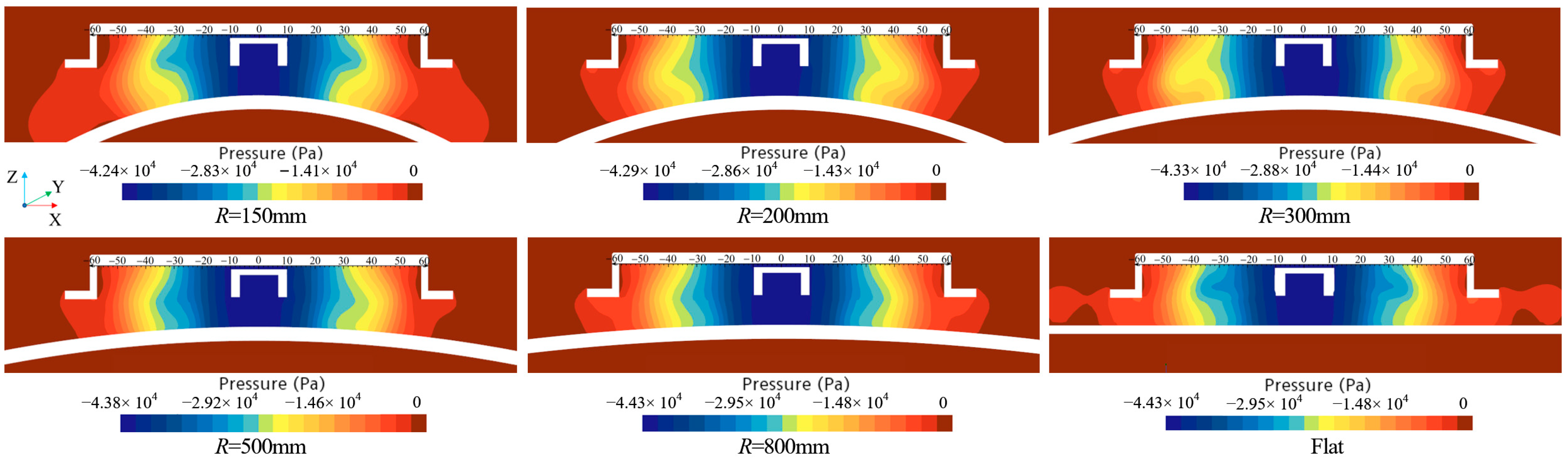
3.2.2. Pressure Distribution
4. Experimental Validation and Discussion
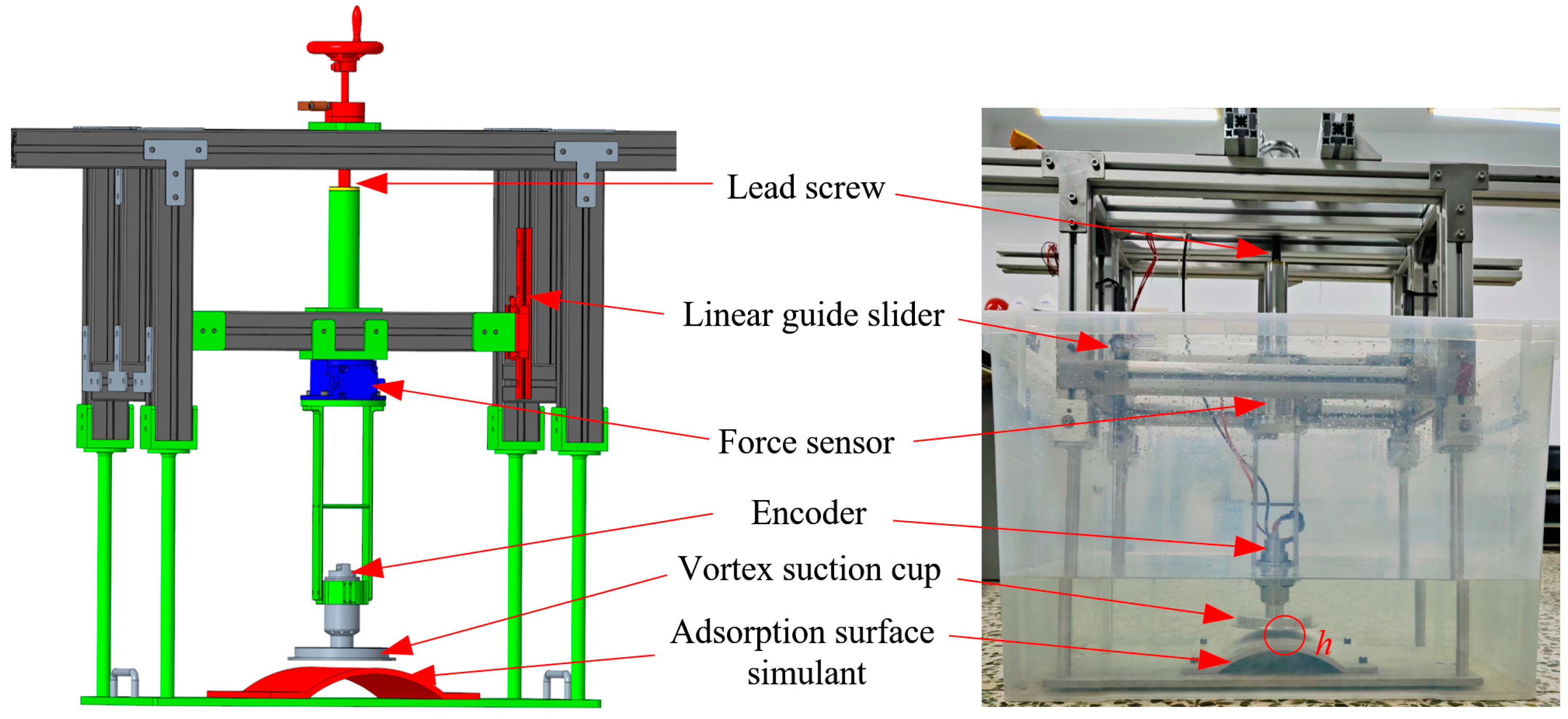
4.1. Setup for the Experiment
4.2. Results and Discussions
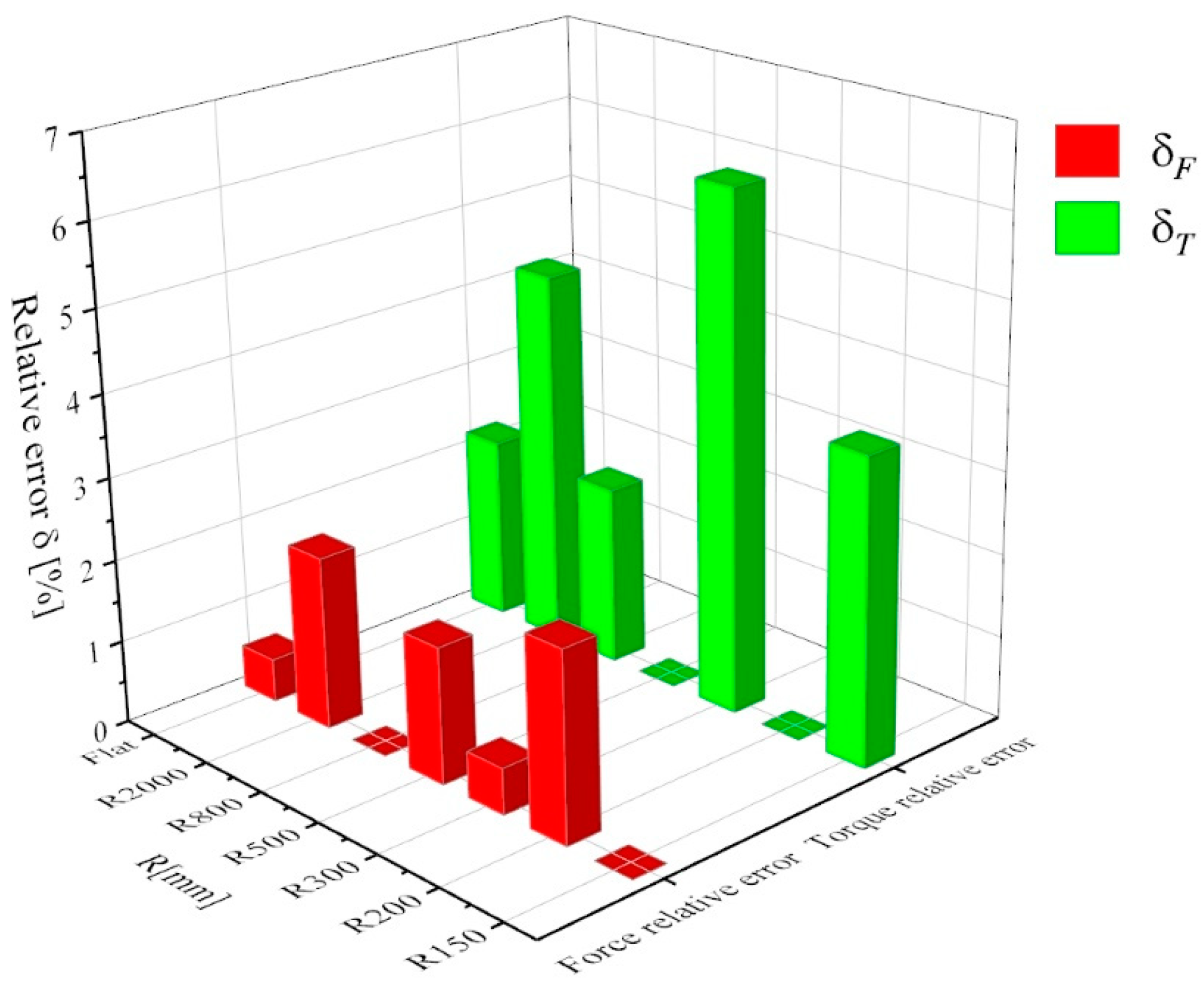
4.2.1. Comparison of Experimental and Simulation Results
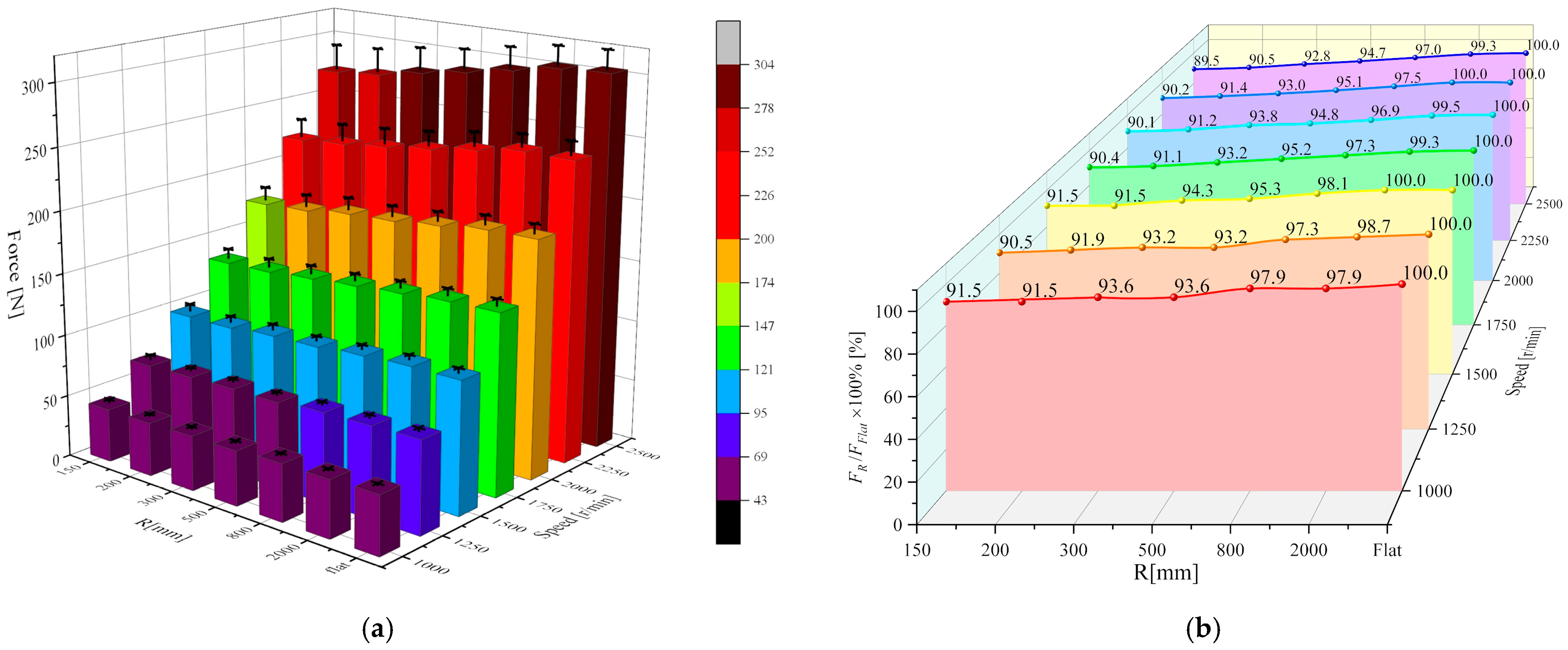
4.2.2. Adsorption Forces
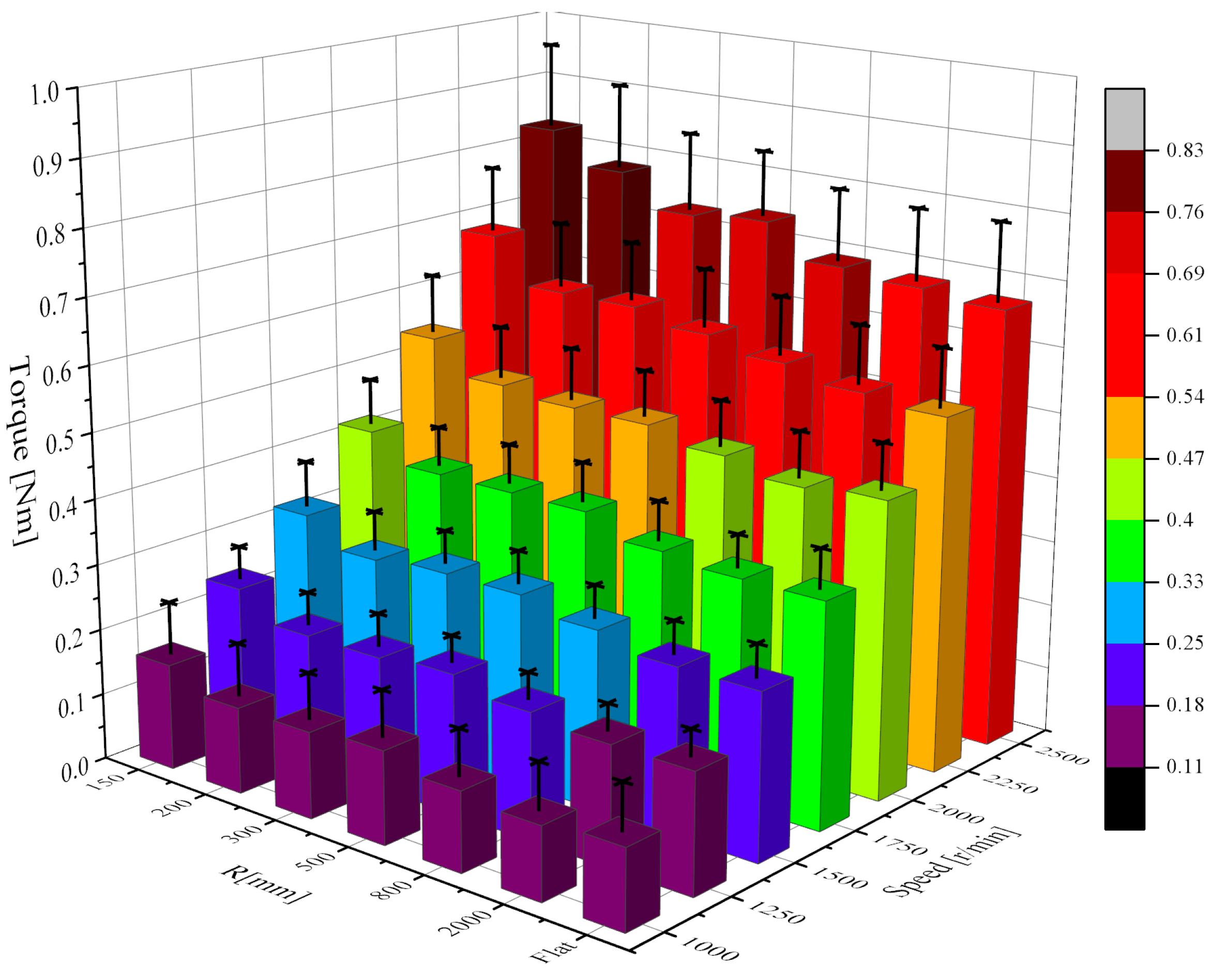
4.2.3. Required Torque
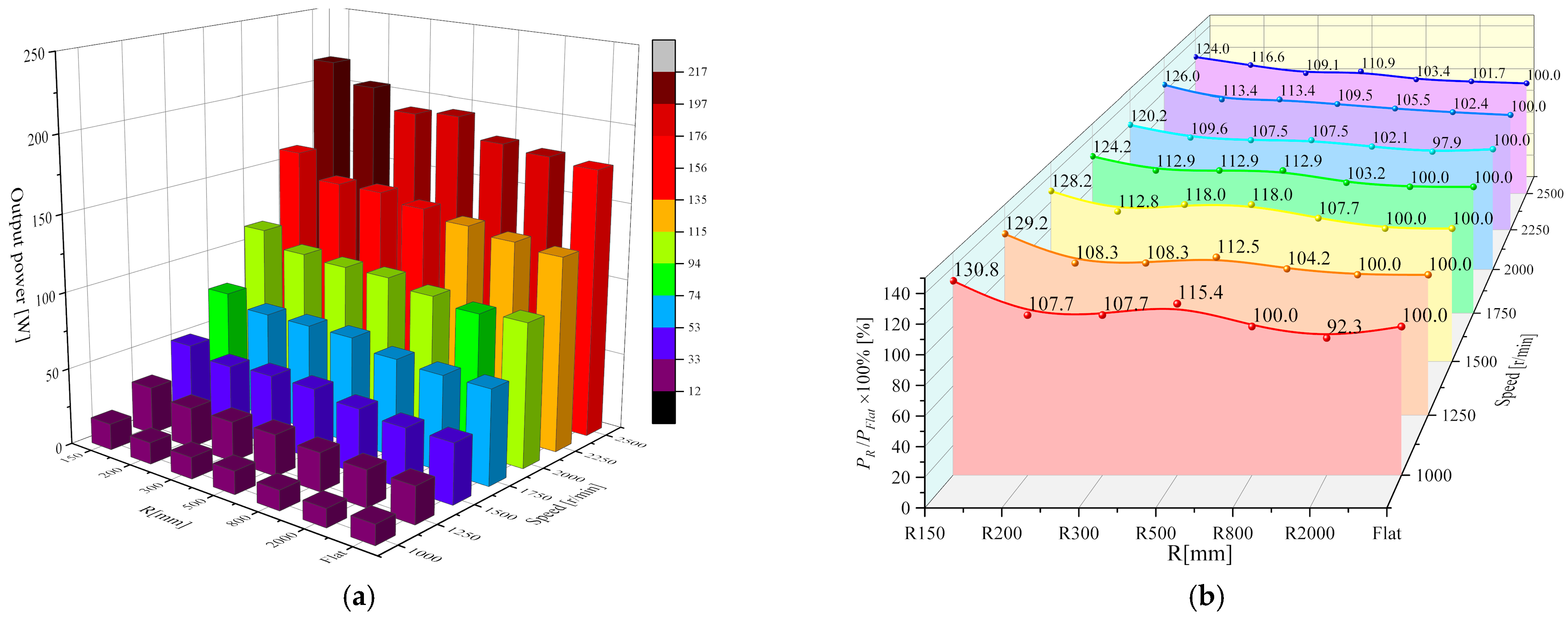
4.2.4. Power Consumption
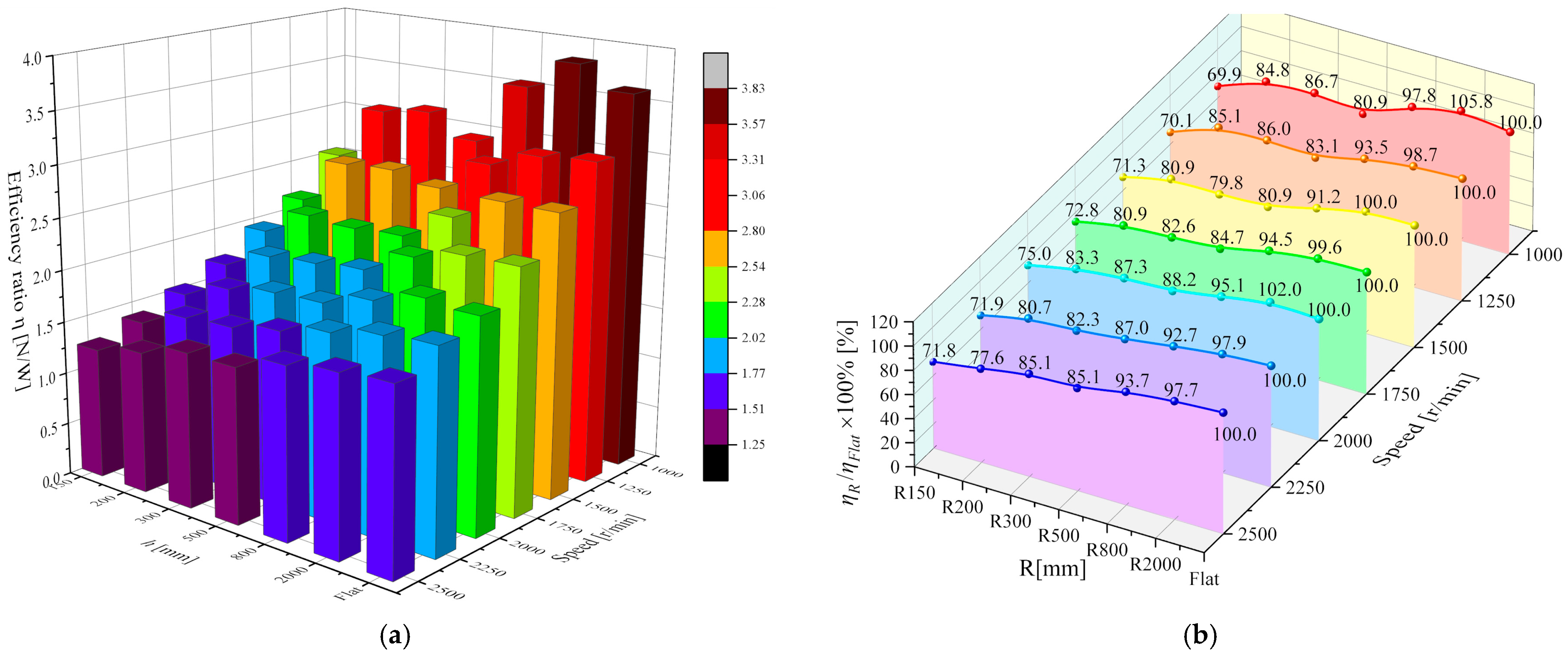
4.2.5. Adsorption Efficiency
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bhattacharyya, S.; Asada, H.H. Control of a Compact, Tetherless ROV for In-Contact Inspection of Complex Underwater Structures. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Chicago, IL, USA, 14–18 September 2014; pp. 2265–2272. [Google Scholar]
- Hirai, H.; Ishii, K. Development of Dam Inspection Underwater Robot. J. Robot. Netw. Artif. Life 2019, 6, 18–22. [Google Scholar] [CrossRef]
- Sakagami, N.; Yumoto, Y.; Takebayashi, T.; Kawamura, S. Development of dam inspection robot with negative pressure effect plate. J. Field Robot. 2019, 36, 1422–1435. [Google Scholar] [CrossRef]
- Qin, Y.; Dong, S.; Pang, R.; Xia, Z.; Yang, J. Design and Kinematic Analysis of a Wall-climbing Robot for Bridge appearance Inspection. IOP Conf. Ser. Earth Environ. Sci. 2021, 638, 012062. [Google Scholar] [CrossRef]
- Iwahori, T.; Takebayashi, T.; Saltagami, N.; Kawainura, S. Computational and Experimental Investigation of a Negative Pressure Effect Plate for Underwater Inspection Robots. In Proceedings of the IEEE/SICE International Symposium on System Integration (SII), Iwaki, Japan, 11–14 January 2021; pp. 239–243. [Google Scholar]
- Yamada, D.; Takebayashi, T.; Kato, H.; Sakagami, N.; Kawamura, S. Underwater Robot with Negative Pressure Effect Plates for Maintenance of Underwater Structures. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Hong Kong, China, 8–12 July 2019; pp. 1092–1097. [Google Scholar]
- Souto, D.; Faina, A.; Pea, F.L.; Duro, R.J. Morphologically intelligent underactuated robot for underwater hull cleaning. In Proceedings of the IEEE International Conference on Intelligent Data Acquisition & Advanced Computing Systems: Technology & Applications, Warsaw, Poland, 24–26 September 2015. [Google Scholar]
- Tavakoli, M.; Viegas, C.; Marques, L.; Norberto Pires, J.; de Almeida, A.T. OmniClimbers: Omni-directional magnetic wheeled climbing robots for inspection of ferromagnetic structures. Robot. Auton. Syst. 2013, 61, 997–1007. [Google Scholar] [CrossRef]
- Fan, J.; Yang, C.; Chen, Y.; Wang, H.; Huang, Z.; Shou, Z.; Jiang, P.; Wei, Q. An underwater robot with self-adaption mechanism for cleaning steel pipes with variable diameters. Ind. Robot-Int. J. Robot. Res. Appl. 2018, 45, 193–205. [Google Scholar] [CrossRef]
- Yang, P.; Zhang, M.; Sun, L.; Li, X. Design and Control of a Crawler-Type Wall-Climbing Robot System for Measuring Paint Film Thickness of Offshore Wind Turbine Tower. J. Intell. Robot. Syst. 2022, 106, 50. [Google Scholar] [CrossRef]
- Guan, Y.; Zhu, H.; Wu, W.; Zhou, X.; Jiang, L.; Cai, C.; Zhang, L.; Zhang, H. A Modular Biped Wall-Climbing Robot With High Mobility and Manipulating Function. IEEE-ASME Trans. Mechatron. 2013, 18, 1787–1798. [Google Scholar] [CrossRef]
- Wang, J.-R.; Xi, Y.-X.; Ji, C.; Zou, J. A biomimetic robot crawling bidirectionally with load inspired by rock-climbing fish. J. Zhejiang Univ. Sci. A 2022, 23, 14–26. [Google Scholar] [CrossRef]
- Nassiraei, A.A.F.; Sonoda, T.; Ishii, K. Development of Ship Hull Cleaning Underwater Robot. In Proceedings of the Fifth International Conference on Emerging Trends in Engineering & Technology, Himeji, Japan, 5–7 November 2012. [Google Scholar]
- Chen, Y.Z.; Hu, Y.H. Research and Application of Ship Hull Fouling Cleaning Technologies. Surf. Technol. 2017, 46, 60–71. [Google Scholar]
- Chen, L.; Cui, R.; Yan, W.; Xu, H.; Zhao, H.; Li, H. Design and climbing control of an underwater robot for ship hull cleaning. Ocean Eng. 2023, 274, 114024. [Google Scholar] [CrossRef]
- Brusell, A.; Andrikopoulos, G.; Nikolakopoulos, G. Novel Considerations on the Negative Pressure Adhesion of Electric Ducted Fans: An Experimental Study. In Proceedings of the 25th Mediterranean Conference on Control and Automation (MED), Valletta, Malta, 3–6 July 2017; pp. 1404–1409. [Google Scholar]
- Chen, Y.; Liu, S.; Zhang, L.; Zheng, P.; Yang, C. Study on the adsorption performance of underwater propeller-driven Bernoulli adsorption device. Ocean Eng. 2022, 266, 112724. [Google Scholar] [CrossRef]
- Li, X.; Li, N.; Tao, G.; Liu, H.; Kagawa, T. Experimental comparison of Bernoulli gripper and vortex gripper. Int. J. Precis. Eng. Manuf. 2015, 16, 2081–2090. [Google Scholar] [CrossRef]
- Li, X.; Kagawa, T. Development of a new noncontact gripper using swirl vanes. Robot. Comput. Integr. Manuf. 2013, 29, 63–70. [Google Scholar] [CrossRef]
- Zhou, Q.; Li, X. Design of wall-climbing robot using electrically activated rotational-flow adsorption unit. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016. [Google Scholar]
- Dong, L.J.; Li, X.; Liu, H.; Tao, G.L. Development and Analysis of an Electrically Activated Sucker for Handling Workpieces With Rough and Uneven Surfaces. In Proceedings of the IEEE International Conference on Advanced Intelligent Mechatronics, Busan, Republic of Korea, 7–11 July 2015. [Google Scholar]
- Zhu, Y.; Zhou, R.; Yang, G.; Zhu, Y.; Hu, D. Experimental and numerical study of the adsorption performance of a vortex suction device using water-swirling flow. Sci. China-Technol. Sci. 2020, 63, 931–942. [Google Scholar] [CrossRef]
- Zhao, Y.B.; Yang, C.J.; Chen, Y.H.; Li, J.; Liu, S.Y.; Ye, G.Y. Study on the Optimal Design for Cavitation Reduction in the Vortex Suction Cup for Underwater Climbing Robot. J. Mar. Sci. Eng. 2022, 10, 70. [Google Scholar] [CrossRef]
- Fan, S.; Cheng, X.; Qiao, K.; Liu, S.; Xu, W. Optimization design and experimental validation of a vortex-based suction cup for a climbing AUV. Ocean Eng. 2022, 257, 111602. [Google Scholar] [CrossRef]
- Guo, T.; Liu, X.; Song, D. Innovative sliding negative pressure adsorptive approach applied to an underwater climbing adsorption robot. Phys. Fluids 2021, 33, 117107. [Google Scholar] [CrossRef]
- Darmawan, S.; Tanujaya, H. CFD Investigation of Flow Over a Backward-Facing Step Using AN RNG k-ε Turbulence Model. Int. J. Technol. 2019, 10, 280–289. [Google Scholar] [CrossRef]
- Almohammadi, K.M.; Ingham, D.B.; Ma, L.; Pourkashan, M. Computational fluid dynamics (CFD) mesh independency techniques for a straight blade vertical axis wind turbine. Energy 2013, 58, 483–493. [Google Scholar] [CrossRef]
- Tang, Q.; Du, Y.; Ding, M.; Zhang, S.; Zhao, Q.; Hu, S.; Tian, C.; Wang, L.; Li, Y.; Wang, G. Study on the performance of vortex suction cup for an underwater inspection robot. Ocean Eng. 2024, 300, 117462. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| H | H1 | H2 | r | r1 | r2 | r3 | r4 | φ |
|---|---|---|---|---|---|---|---|---|
| 10 mm | 1.3 mm | 0.7 mm | 10 mm | 42.3 mm | 58.5 mm | 60 mm | 70 mm | 150° |
| Coarse | Medium | Fine | |
|---|---|---|---|
| Basic size | 0.12 (mm) | 0.1 (mm) | 0.08 (mm) |
| Mesh quantity | 764,024 | 1,142,622 | 1,989,966 |
| Simulation force | 270 (N) | 270 (N) | 269 (N) |
| Simulation torque | 0.88 (Nm) | 0.91 (Nm) | 0.91 (Nm) |
| Adsorption Surface Curvature Radius (mm) | Experimental Force (N) | Simulated Force (N) | Experimental Torque (Nm) | Simulation Torque (Nm) |
|---|---|---|---|---|
| 150 | 173 | 173 | 0.56 | 0.54 |
| 200 | 179 | 175 | 0.49 | 0.49 |
| 300 | 181 | 180 | 0.45 | 0.48 |
| 500 | 185 | 182 | 0.48 | 0.48 |
| 800 | 186 | 186 | 0.47 | 0.46 |
| 2000 | 187 | 191 | 0.46 | 0.44 |
| Flat | 191 | 192 | 0.46 | 0.45 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, Q.; Du, Y.; Liu, Z.; Zhang, S.; Zhao, Q.; Li, Y.; Wang, L.; Cui, T.; Wang, G. Study on the Adsorption Performance of a Vortex Suction Cup under Varying Diameters of Underwater Structure Tubes. J. Mar. Sci. Eng. 2024, 12, 662. https://doi.org/10.3390/jmse12040662
Tang Q, Du Y, Liu Z, Zhang S, Zhao Q, Li Y, Wang L, Cui T, Wang G. Study on the Adsorption Performance of a Vortex Suction Cup under Varying Diameters of Underwater Structure Tubes. Journal of Marine Science and Engineering. 2024; 12(4):662. https://doi.org/10.3390/jmse12040662
Chicago/Turabian StyleTang, Qinyun, Ying Du, Zhaojin Liu, Shuo Zhang, Qiang Zhao, Yingxuan Li, Liquan Wang, Tong Cui, and Gang Wang. 2024. "Study on the Adsorption Performance of a Vortex Suction Cup under Varying Diameters of Underwater Structure Tubes" Journal of Marine Science and Engineering 12, no. 4: 662. https://doi.org/10.3390/jmse12040662
APA StyleTang, Q., Du, Y., Liu, Z., Zhang, S., Zhao, Q., Li, Y., Wang, L., Cui, T., & Wang, G. (2024). Study on the Adsorption Performance of a Vortex Suction Cup under Varying Diameters of Underwater Structure Tubes. Journal of Marine Science and Engineering, 12(4), 662. https://doi.org/10.3390/jmse12040662