1. Introduction
Wind energy, characterized by its abundant availability and ease of development, has emerged as the fastest-growing and most successfully commercialized renewable energy source, with a cumulative installed capacity of 743 GW by 2020 [
1]. Nonetheless, the progression towards large-scale and deep-sea deployment of floating horizontal axis wind turbines (HAWTs), which is aimed at reducing unit costs and increasing total capacity, has led researchers to increasingly confront some serious challenges [
2].
Vertical axis wind turbines (VAWTs) are deemed an optimal solution to address these concerns, capitalizing on the numerous benefits summarized in the literature [
3]. Additionally, Tzanakis [
4] and SeaTwirl [
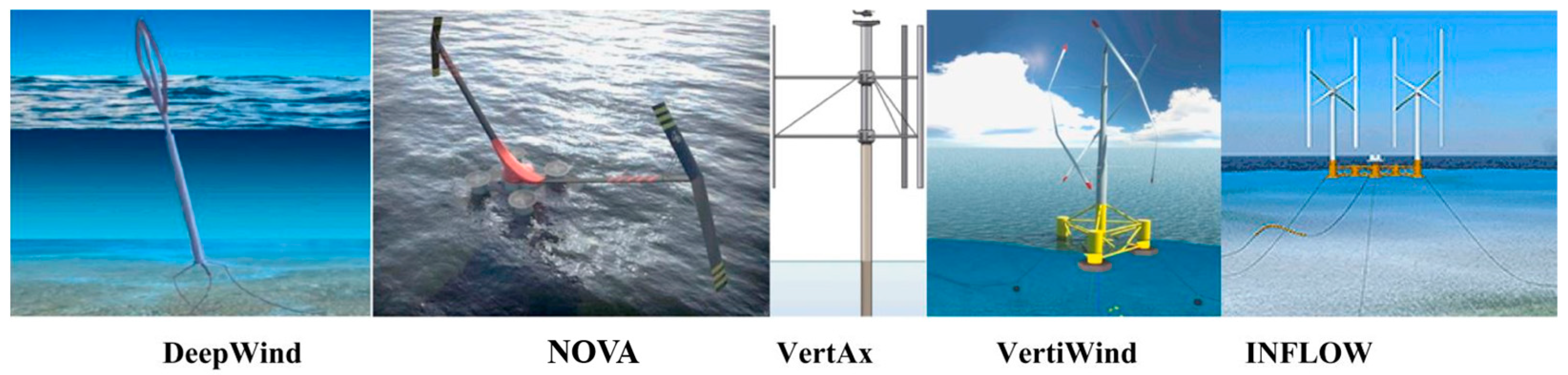
5] have also indicated that floating VAWTs exhibit superior performance in dense wind farms compared to conventional HAWTs. Consequently, numerous renowned concepts have been developed, including DeepWind [
6], NOVA, VertAx [
7], VertiWind [
8], and INFLOW [
9], as illustrated in
Figure 1. However, it should be highlighted that VAWTs possesses a unique structural configuration compared to HAWTs (i.e., two blade-inflow interactions and dynamic attack angle), resulting in significant changes in their load and structural characteristics. When integrated with a floating platform, floating VAWTs would encounter a more intricate mechanism in the coupled wind-wave environment, which remains unexplored and holds significant interest.
Fluid-structure interaction (FSI) analysis is indispensable for the study of floating VAWTs, given the intricate load and structural response scenarios. It is a well-established fact that floating wind turbines constitute a unique rigid-flexible multi-structure, characterized by the slenderness and flexibility of both the blade and the tower, in conjunction with a more rigid floating foundation. Under the complex wind-wave coupling loadings, these floating wind turbines demonstrate significant FSI characteristics. Consequently, it is crucial to address load and structural response in an integrated manner for accuracy. Currently, there are two primary FSI methods in offshore wind technology: the simplified fully coupled model and the direct computational fluid dynamics-finite element analysis (CFD-FEA) coupling approach.
The first is the fully coupled aero-hydro-moor-elastic model, where finite element analysis or multi-body dynamics is integrated into the existing simplified load coupled model. In 2007, Larsen [
10] at the Technical University of Denmark initially presented a comprehensive HAWC2 model for floating VAWTs. This model utilized the actuator cylinder (AC) theory, Morrison theory, and multi-body dynamics theory for its aerodynamic, hydrodynamic, and structural solution, respectively. Subsequently, Wang [
11] from the Norwegian University of Science and Technology advanced a novel coupling model for floating VAWTs, referred to as SIMO-RIFLEX-DMS. The key contribution of this model resides in its improvement in precision for each module through the integration of double-multiple streamtube (DMB) model, potential flow theory, and finite element beam model. Furthermore, Cheng [
12] replaced the aerodynamic module with the AC model, resulting in the formation of SIMO-RIFLEX-AC. In summary, although these coupling models demonstrate enhanced computational efficiency, their application is primarily confined to the initial design phase for offshore VAWTs, given that each module is constructed from simplified representations.
The second approach involves the utilization of the direct CFD-FEA coupling method, wherein all fluid loads are resolved by solving the N-S equations and transferred to the structural model in real time, facilitating the computation of the structural response at each tine step. Zhang et al. [
13] employed the CFD-FEA coupling method to conduct numerical simulations of a three-blade VAWT, aiming to optimize its structure. Based on this method, Liu and Xiao [
14] conducted an investigation into the effects of blade flexibility on the performance and structural safety of VAWTs with straight blades, concluding that soft blades (low stiffness) are not beneficial for aerodynamic performance and safety. Similarly, Borouji [
15] conducted a fatigue analysis for NREL-5MW fixed wind turbines. Achieving CFD-FEA coupling within the ANSYS platform, Marzec [
16] conducted an FSI analysis of the Savonius VAWT and determined that minor blade deformations could enhance power output by approximately 5%, attributing a considerable impact to centrifugal force on structural deformation. A similar study was also conducted by Hoerner [
17]. It is evident that CFD-FEA coupling has emerged as a novel research approach in the field of wind turbines given that CFD can effectively account for the effects of viscosity and nonlinearity on fluid loads, while FEA excels in analyzing the structural response of the entire system. However, current research remains confined to fixed VAWTs.
As previously mentioned, although simplified fully coupled models are capable of conducting integrated FSI analysis for floating VAWTs, they are only suitable for initial design due to their neglect of nonlinear aerodynamic loads and the response of actual three-dimensional structures. The direct CFD-FEA coupling method demonstrates remarkable precision; however, it remains confined to the domain of fixed VAWTs. To comprehensively and accurately predict the performance of floating VAWTs, this study aims to extend the CFD-FEA coupling method to the field of floating VAWTs. This paper is organized as follows. The numerical modelling process and theory of CFD-FEA are first introduced in
Section 2, forming an aero-hydro-moor-elastic model. Subsequently, in
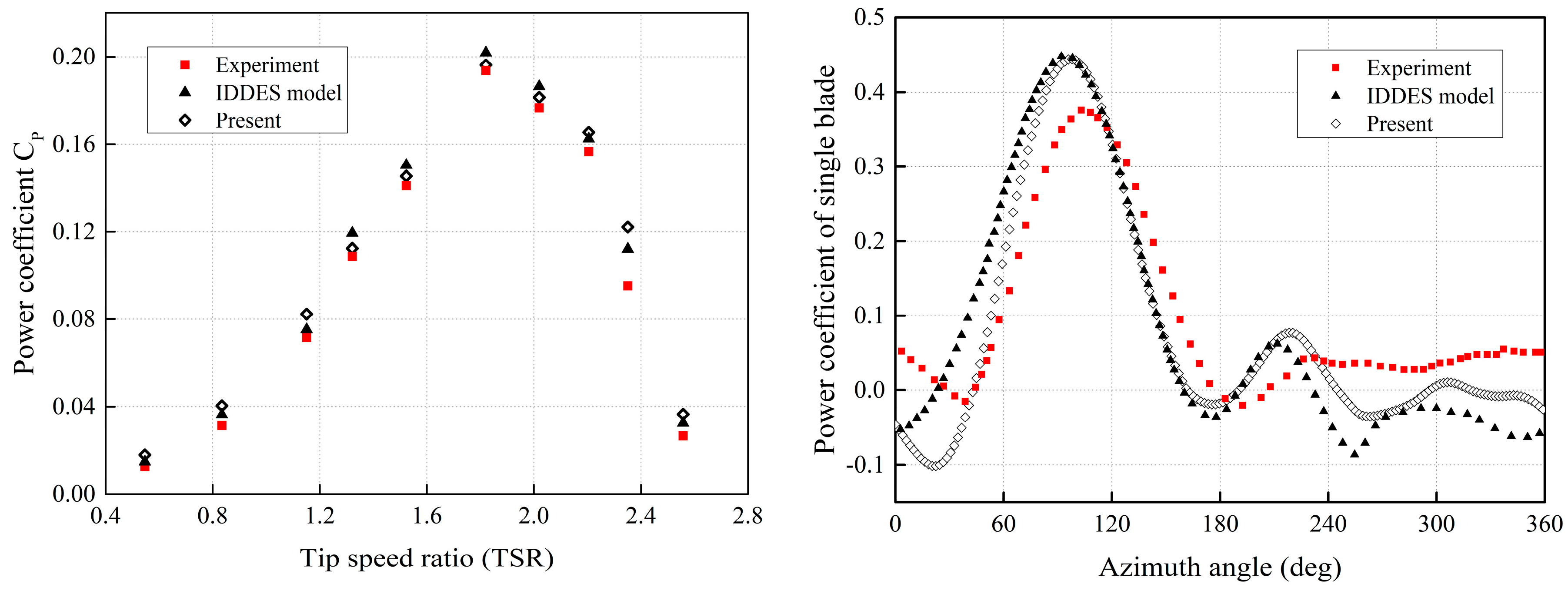
Section 3, each module of the developed model is individually validated by comparing its results with available experimental data.
Section 4 then describes the geometry and numerical model of a floating straight-bladed VAWT, and mesh-dependent modal analyses and simulated cases are also included. After that, the acquired external load and structural responses in a typical case are analyzed in both time and frequency domains in
Section 5. Further,
Section 6 discusses the effect of wind speed, wave height, and wind-wave misaligned angles on a floating VAWT system. Finally, several key findings are presented in
Section 7. This study presents a precise FSI numerical method for evaluating floating VAWTs, particularly benefiting the detailed design stage.
5. Results
To reveal the load and structural response characteristics of a floating VAWT in wind and wave environments, time-domain and frequency-domain analyses are performed on the acquired data. Given the constraints of space, the results from LC2, a typical case, are presented in this section.
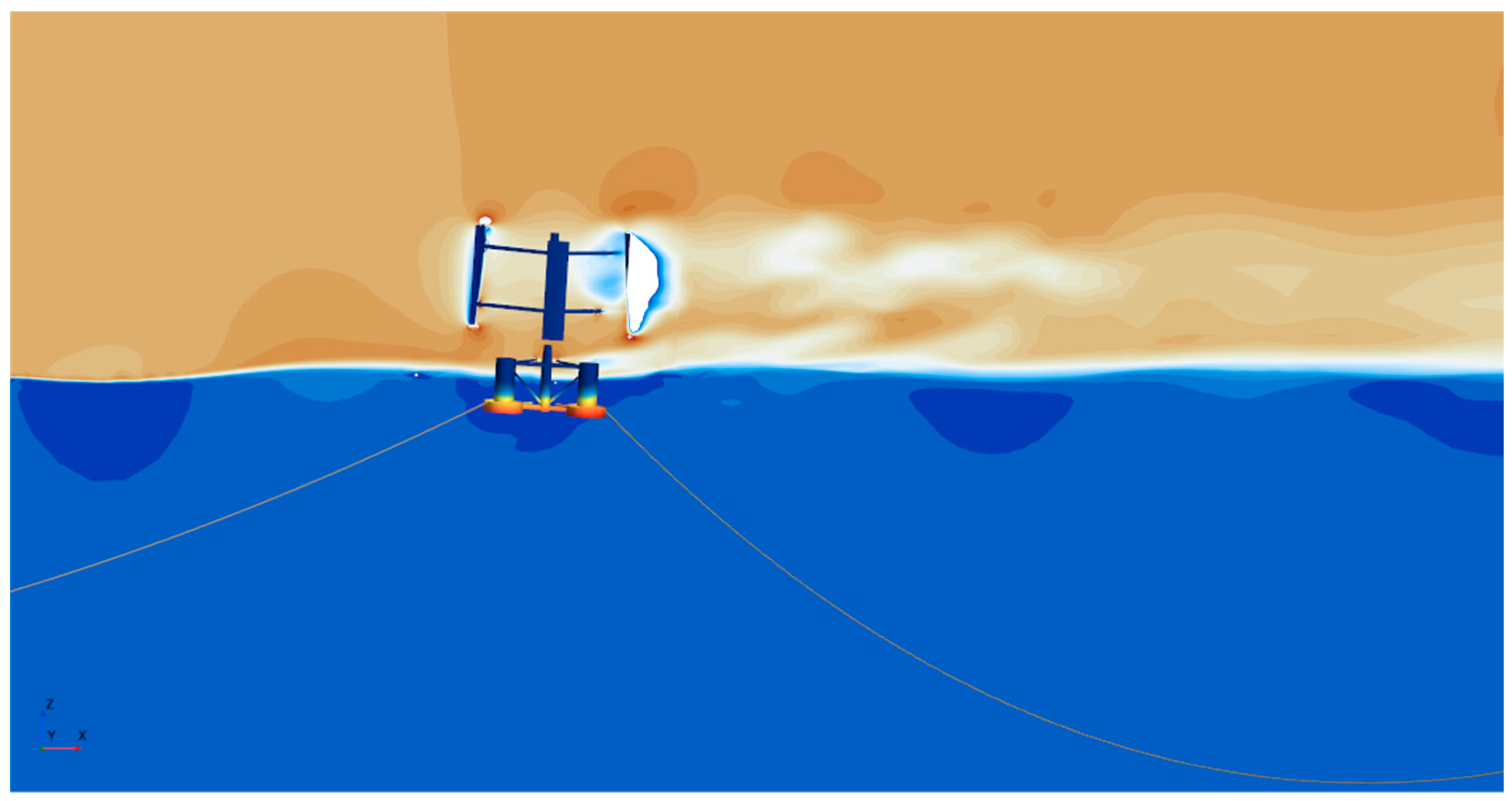
Figure 11 depicts the operational status of the floating system within the wind-wave environment. It is evident that the entire machine experiences a slight pitch, with the wave run-up along the fore-side column. Additionally, the rotating VAWT generates partial eddies at the upper and bottom edges of the blades. Furthermore, as illustrated by the wind speed cloud image along the longitudinal section, an evident low-speed wake zone is formed. The wake length has a direct impact on the wind farm layout.
Given that time-domain load and motion responses have been presented and analyzed in previous work [
19], the frequency-domain analysis is extended and addressed in this section.
Figure 12 displays the frequency-domain curves of the torque and lateral force generated by the rotor, alongside the frequency-domain curves of the pitch and heave motion generated by the entire floating system. In this typical case, the wave frequency is 0.133 Hz, and the rotor rotation frequency is 0.083 Hz. The maximum value of the aerodynamic load is observed to occur near 0.252 Hz, which is approximately three times (3P) the rotation frequency. This is attributed to the alternating appearance of the three equivalent blades, resulting in three peak characteristics per cycle. The primary source of energy for the aerodynamic load is derived from the wind load. Moreover, a small peak value near the wave frequency of 0.133 Hz is noticed, suggesting that the aerodynamic load may also be influenced by waves.
The natural frequency of the floating system is 0.039 in pitch and 0.056 in heave motion. The frequency distribution of the pitch and heave motion in the frequency domain indicates that the maximum peak is approximately aligned with the corresponding natural frequency. The secondary peak frequency, approximately 0.08, is akin to the rotation frequency of the rotor. This finding suggests that the motion response of the floating VAWT system is primarily influenced by wind load and the natural period.
In summary, the aerodynamic load generated by the rotor is primarily influenced by wind, with a negligible contribution from waves. The motion responses of the entire system are mainly determined by its natural property, albeit wind load exerts a considerable impact on it as well.
Presented in
Figure 13 are the stress and displacement distributions of the entire machine structure at a specific instant. The structural stress is primarily concentrated in the rotor-strut connecting zone, the root of the tower, the platform joint, and the lower floater of the platform. Concurrently, the displacement of the entire system is primarily concentrated in the rotor. The upper end of each blade and the top of the tower experience a larger displacement, indicating that the blades would undergo a vibration during rotation, and the tower exhibits lateral deflection. To gain a deeper understanding of the structural response characteristics of the complete system, it is crucial to analyze each component individually, including the blades, towers, and floating foundations. Consequently, time-domain and frequency-domain analyses are conducted for the stress of each gauge point and cross section, as shown in
Figure 13.
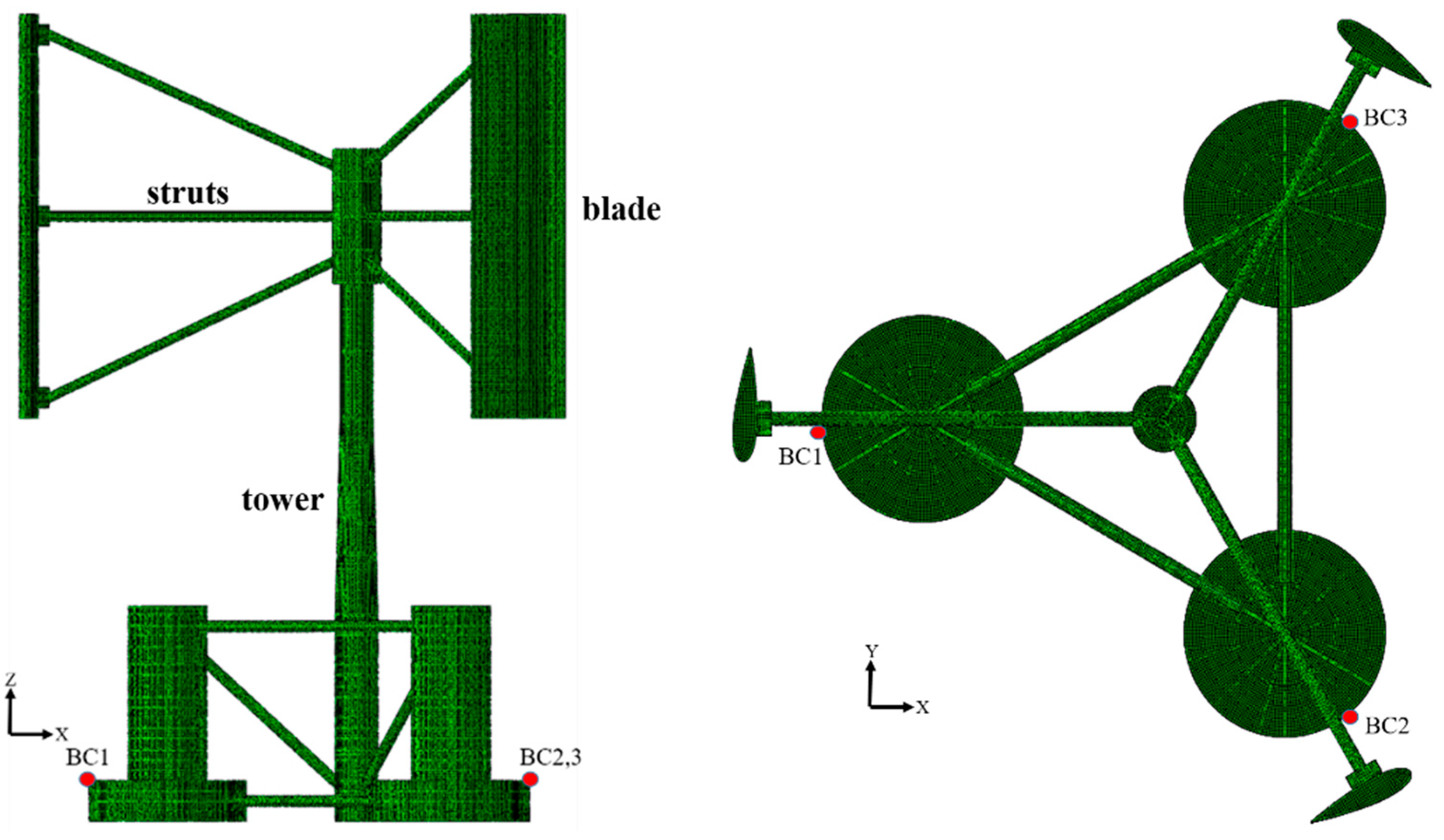
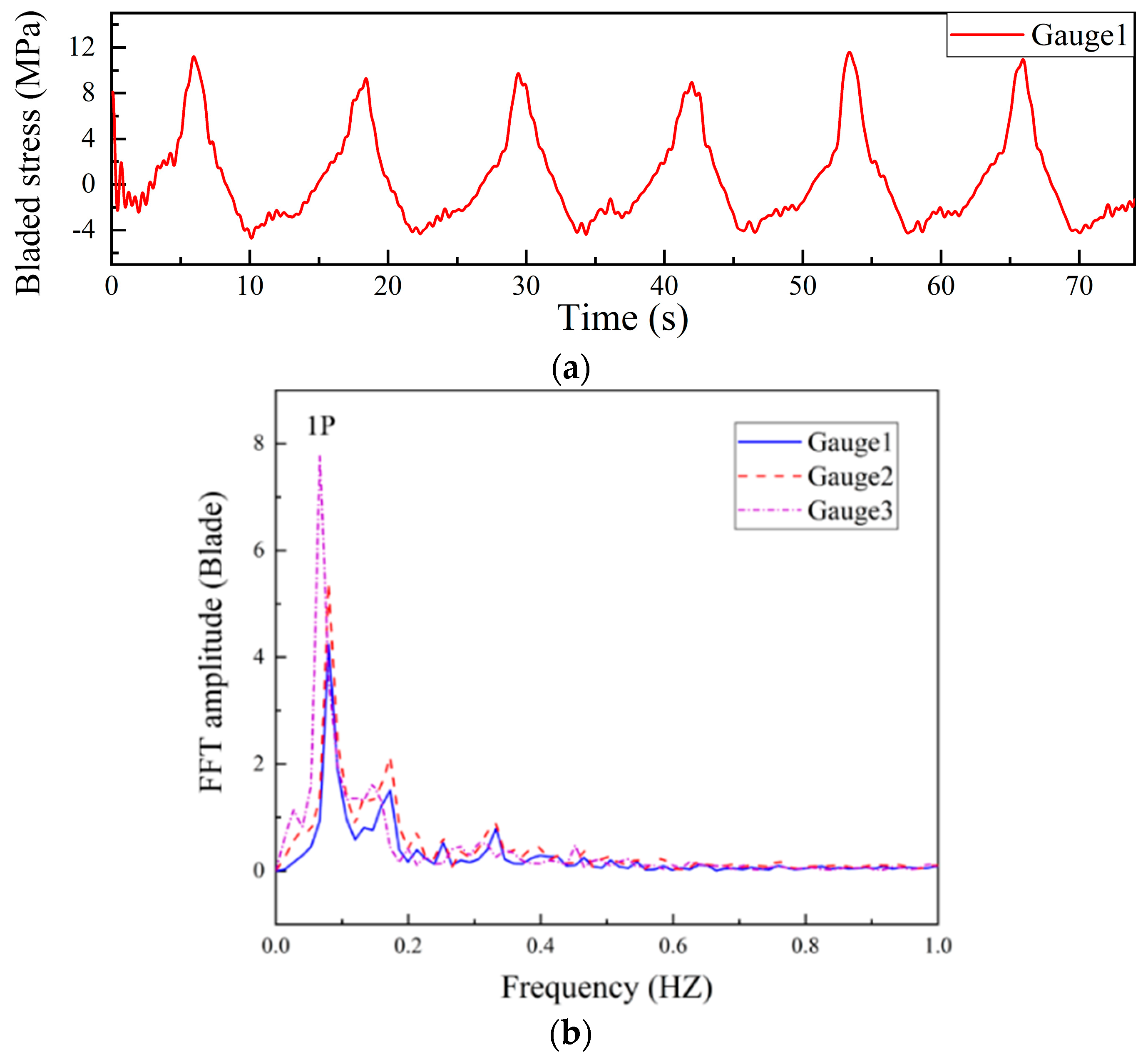
The time-domain stress curve of a blade gauge, depicted in
Figure 14a, exhibits a single peak per period. The frequency-domain analysis of three blade measuring points, as illustrated in
Figure 14b, indicates a maximum peak corresponding frequency of approximately 0.0789, which is close to the rotation frequency. This finding suggests that the blade structural response is primarily associated with wind load. Additionally, the amplitude analysis reveals that the amplitude of measuring point 3 is the greatest, while that of measuring point 1 is the smallest. This suggests a higher stress concentration in the middle of the blade compared to the ends.
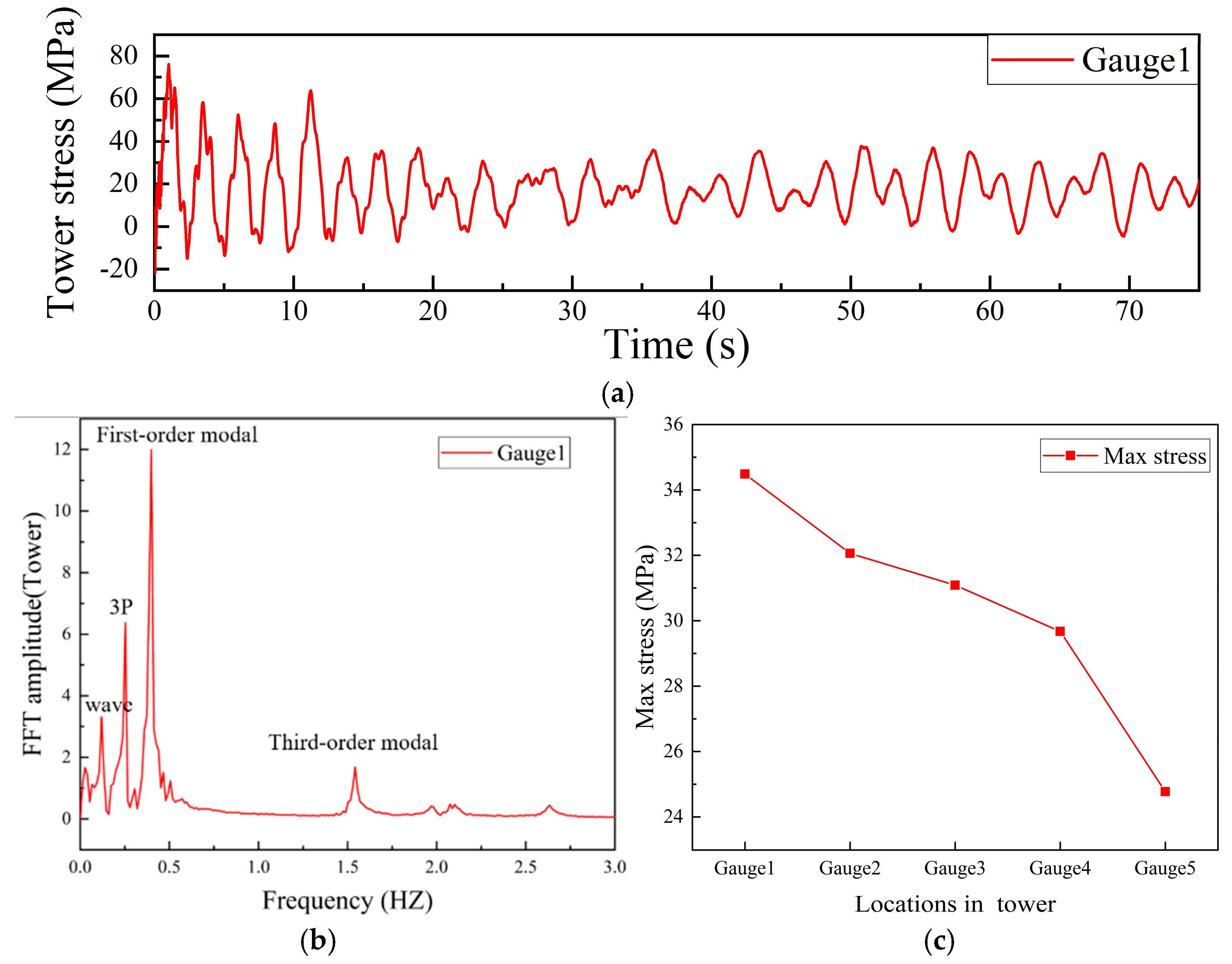
The stress levels of the five measuring points on the tower in both the time and frequency domains are depicted in
Figure 15. It is evident that the stress amplitude stabilizes, but the absence of distinct periodicity is perplexing, necessitating a frequency domain analysis. Notably, the stress at the first measuring point exhibits four distinct peaks in the frequency domain, with the maximum peak corresponding to a frequency of approximately 0.3999, which is notably close to the first-order modal frequency, referring to tower 2-node vibration. The second largest peak corresponds to a frequency of approximately 0.252, which is closed to three times the rotation frequency (3P), suggesting that the tower periodically experiences the effects of three single blades. The third peak corresponds to a frequency of approximately 0.119, satisfying the wave frequency. This may be attributed to the relative movement between the upper structure and the lower platform, including rotation and translation, during the periodic wave action. Additionally, a slight peak appearing around 1.5 is closed to the third-order modal frequency, which relates to tower 3-node vibration. In summary, the tower is simultaneously influenced by wind and wave loads, which may lead to self-vibration of the structure, including 2-node and 3-node vibrations.
Figure 15c depicts the maximum stress of the five evaluation points. It is notable that a significant reduction in stress is observed as the height increases. The maximum stress at the base of the tower approximates 35 MPa, whereas the maximum stress at the measuring point 5, which is situated closer to the upper section, reaches approximately 24 MPa.
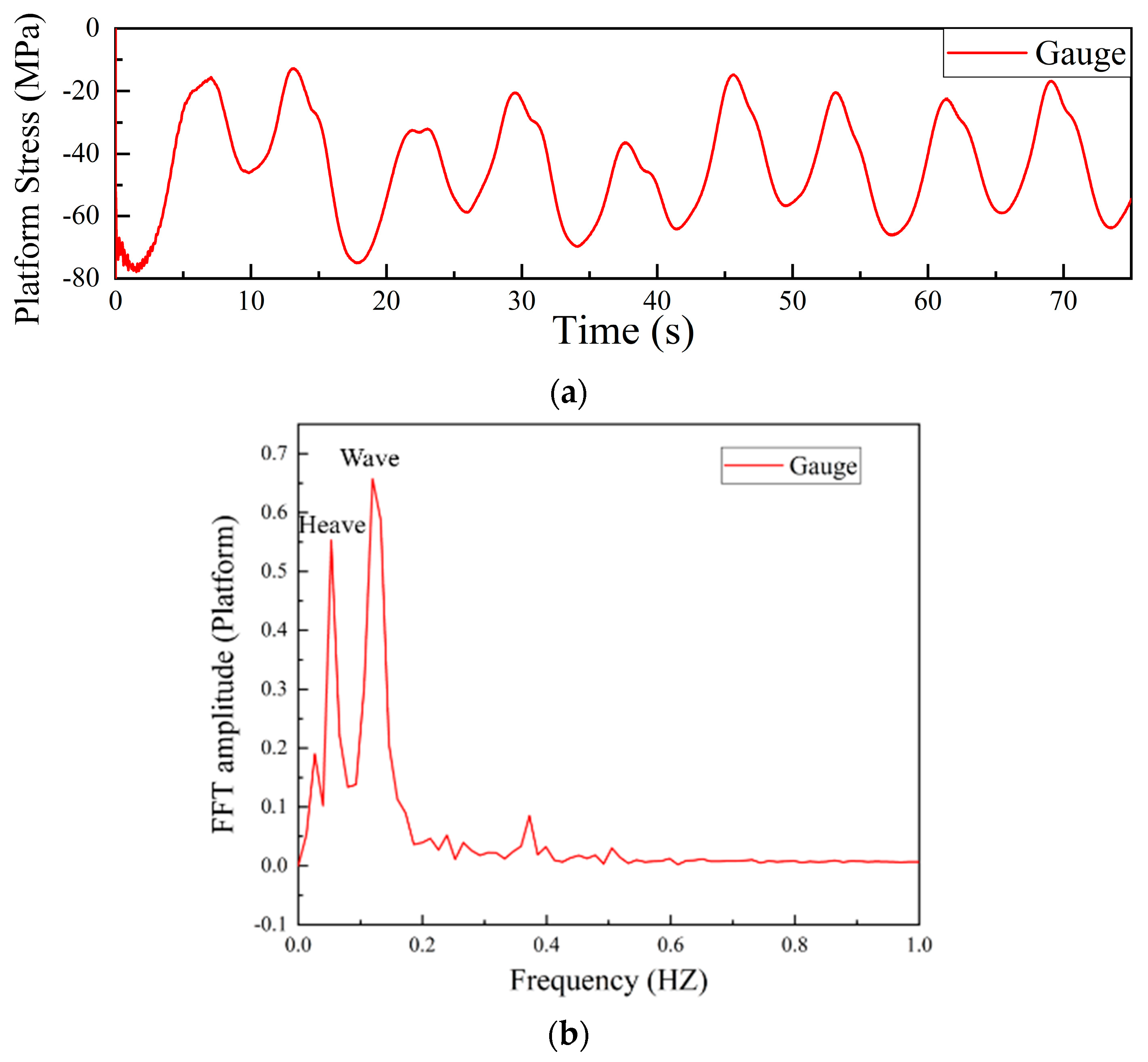
The time-domain curve and frequency-domain distribution of the stress at the measuring point, which is situated on the upper buoy close to the column on the wave-facing side, are presented in
Figure 16. The result indicates that the stress exhibits distinct periodicity and a stable amplitude, with the maximum stress level reaching approximately 55 MPa. The frequency-domain distribution reveals that the dominant frequency is approximately 0.121, which is related to the wave frequency. Additionally, the frequency of the second-largest peak is approximately 0.05, which is close to the natural frequency of the heave motion. This could be attributed to the periodic fluctuations in water pressure induced by periodic regular waves, coupled with the vertical motion, which also generates water pressure fluctuations. Consequently, the ultimate structural response of floating foundation is primarily contributed by these two sources.
6. Discussion
The floating VAWT, situated in the deep sea, is frequently influenced by wind and waves. The wind speed, wave height, and misaligned angle are crucial parameters that contribute to the load, necessitating the examination of their effects on the floating VAWT. Consequently, a statistical analysis focusing on the performance and structural safety of the entire machine is conducted.
6.1. Wind Speed
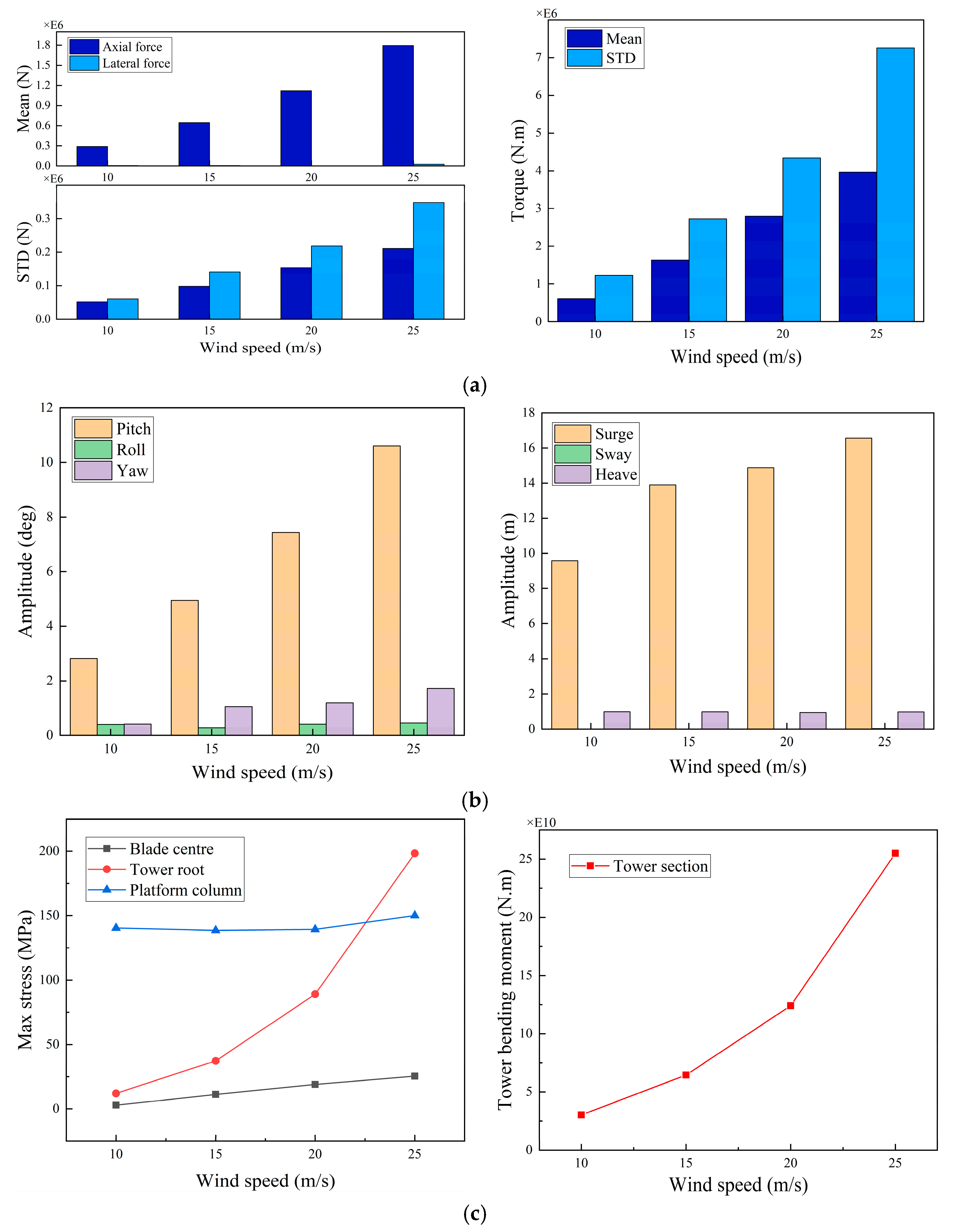
Figure 17a depicts the mean and standard deviation (STD) values of the total torque, axial thrust, and lateral thrust generated by the rotor at varying wind speeds. A significant increase in the mean value of axial thrust and STD is observed with the escalation of wind speed, with the mean value escalating nearly fivefold. The average lateral thrust remains relatively stable, exhibiting minimal variation, and is approximately zero; however, its STD experiences a significant increase. This suggests that although the average level of lateral thrust is consistently low, its fluctuation degree is even greater than that of axial thrust, which necessitates attention. A significant increase in the mean value and STD of the total torque is also observed with the increase in wind speed, with both increasing approximately sixfold.
Figure 17b demonstrates the maximum 6-DOF motion of the system under various wind speeds. As the wind speed elevates, the amplitudes of pitch, yaw, and surge escalate by 3.8 times, 4.2 times, and 1.7 times, respectively. However, the amplitudes of roll, sway, and heave demonstrate minimal changes. This could be attributed to the increase in axial force generated by the rotor with wind speed, as the rotor is situated in the top position. Consequently, rotation (pitch) and drift movements (surge) in longitudinal are induced. The alteration of the yaw angle of the entire system might be influenced by a violent disturbance of the lateral force.
The structural safety of each component of the entire machine is evaluated and compared, as illustrated in
Figure 17c, which depicts the structural safety of each component, including the bending moment at the blade midpart, the tower root, and the platform column. It is evident that the maximum stress at the tower root demonstrates a nonlinear increase with increasing wind speed, becoming most prominent. At a wind speed of 25 m/s, the maximum stress approaches 200 MPa, and the bending moment at the tower root section exhibits a similar trend, almost five times. The maximum stress in the blade midpart also experiences a slight increase, from 5 MPa to approximately 25 MPa. The maximum stress at the platform column measuring point remains constant at around 145 MPa, with no apparent changes. Overall, the tower and blade structure exhibit greater sensitivity to changes in wind speed.
6.2. Wave Height
Figure 18a illustrates the influence of wave height on the floating VAWT. It is evident that the mean and STD values of the aerodynamic performance demonstrate minimal alterations with the increase in wave height. However, a slight increase in the STD of the total torque is observed. This might be attributed to the fact that as wave height elevates, the amplitude of motion in the entire system amplifies, thereby notably altering the wind energy utilization zone and the angle of incidence of the upper rotor. Consequently, the degree of disturbance in the total torque augments, but the overall mean level remains stable.
Figure 18b illustrates the maximum 6-DOF motion of the system under various wind speeds. With the increasing wave amplitude, the pitch, surge, and heave exhibit a significant enhancement, approximately multiplying by 1.5, 1.3, and 1.5 times, respectively. In contrast, the amplitudes of roll, yaw, and sway remain small and demonstrate no significant change. It is noticed that the variable wave cases belong to head wave condition, the floating foundation experiences rotation and drift in the wave propagation direction, and the platform undergoes periodic heave motion.
Figure 18c demonstrates the structural response variation of each component under different wave height. Different from the effect pattern induced by wind speed, the maximum stress on the blade and tower does not exhibit a significant change with wave height, remaining within a stable range. Nonetheless, as the wave height increases, the maximum stress of the platform column experiences a notable increase, from 50 MPa to 210 MPa. Despite the fact that the section bending moment at the tower root increases with wave height, reaching approximately 1.1 times the original value, the effect induced by wave height is significantly less than the impact of wind speed.
6.3. Misaligned Angle
The marine environment is inherently complex and dynamic, with wind and waves acting on the entire system from varying directions. Thus, it becomes imperative to examine the impact of wind-wave misaligned angles on the floating VAWT. To simulate various wind-wave misaligned angles, the wind inflow direction is kept constant, always facing the head-wave direction (positive X-axis), while the wave propagation direction gradually alters from the head-wave direction to the beam-wave direction (negative Y-axis) at an interval of 30 degrees. Consequently, four working conditions are established: 0°, 30°, 60°, and 90°.
Figure 19 shows the variation in aerodynamic and hydrodynamic performance of the floating VAWT. The fluctuations in the aerodynamic performance of the rotor generally diminish as the wind-wave misaligned angles increase, but this effect is less pronounced compared to the influences of wave height and wind speed. Motion results reveal that the maximum motion of pitch and surge decreases with the increasing misaligned angle, whereas the maximum motion of roll and sway exhibits an opposite trend. Throughout the process of a wave transforming into a beam wave, the magnitude of the wave force impacting the floating platform remains virtually unaltered, yet the direction of its effect progressively shifts from longitudinal to horizontal. Consequently, the longitudinal movement decreases, while the lateral movement increases.
The structural response changes are depicted in
Figure 19c. It can be observed that the maximum stress in the platform column gradually decreases with the increasing misaligned angle, from 140 MPa to 90 MPa. The maximum stress at the tower root and the middle of the blade remains relatively stable, with the tower root at approximately 40 MPa and the middle of the blade at approximately 10 MPa. The bending moment at the section near the tower root decreases by 15%. When the wave load shifts laterally, the column housing the gauge is no longer the first column in contact with the wave, resulting in a reduction in impact load. This might be the reason why platform stress is reduced. Additionally, due to the alteration in the direction of the wave load, the wind-induced torque and wave-induced torque superposition at the tower root is minimized, thereby decreasing the pressure exerted on the tower.
7. Conclusions
To obtain a more comprehensive and realistic load and structural response for floating VAWTs, this paper aims to extend CFD-FEA coupling technology into the floating VAWT area. An aero-hydro-moor-elastic fully coupled model is first developed. This model is validated by comparing results with several model experiments, including aerodynamics, hydrodynamics, and structure dynamics. Then, the geometrical and numerical models of a full-scale floating VAWT are introduced, and several variable wave height, wind speed, and misaligned angle cases are determined on the basis of ocean statistics. The load and structural response of a floating VAWT under typical operating conditions are investigated in both the time and frequency domains. The effects of wind speed, wave height, and misaligned angle on the floating VAWT are analyzed statistically. Key findings are presented as follows:
CFD-FEA coupling technology is successfully extended to the field of floating VAWTs, and the fully coupled model developed is validated. Moreover, this method has the advantage of considering nonlinearities of aerodynamics and hydrodynamics, such as wake vortex and green water, etc., and the three-dimensional structures can be evaluated globally and locally. For instance, the findings of the flow distribution of the whole computational domain in
Figure 11 and the stress and displacement distributions of the whole floating VAWT in
Figure 13 are impossible to gain from the simplified fully coupled models.
The analysis results of a typical operating condition reveal the primary contribution sources of the load and structural response for each part. The aerodynamic load is primarily influenced by the three-times rotation frequency (3P), while the system motion is associated with its natural frequency and wave frequency. The structural response of the blades is predominantly induced by the wind load, whereas the structural response of the tower is related to the 2-node mode, 3-node mode, wind load, and wave load. Lastly, the structural response of the platform is primarily associated with heave motion and wave frequency.
The statistical analysis uncovers the susceptibility of various components within the floating VAWT to environmental parameters. Significant alterations in aerodynamic load levels are induced by wind speed, while changes in wave height and misaligned angle have a negligible impact on it. All three parameters result in considerable modifications to the hydrodynamic performance, particularly concerning pitch, roll, and surge. For the structural response, the tower structure is sensitive to wind speed and misaligned angle, blade structure is primarily dominated by wind speed, and the platform is more susceptible to wave height and misaligned angle.
In this paper, we conduct a fluid-structure interaction analysis of a straight-blade OF-VAWT. The investigation shows that the tower structural response is more complicated when it contains 2-node, 3-node, wind frequency, and wave frequency components. Further, statistical analysis identifies that the tower structure is sensitive to both wind speed and misaligned angle. This study provides a solution with higher precision for predicting structural safety in the detailed design stage, and the findings have implications for engineering design. However, the present fluid-structure interaction work concentrates on elastic deformation, and the fatigue as well as the plasticity are not yet considered; thus, related damage research will be conducted in the future. Meanwhile, it should be noted that the present CFD-FEA is time-consuming despite being precise in predicting detailed structural problems. Hence, a simplified model with satisfying accuracy is also essential for initial designs.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}