Abstract
Local path planning, as an essential technology to ensure intelligent ships’ safe navigation, has attracted the attention of many scholars worldwide. In most existing studies, the impact of COLREGS has received limited consideration, and there is insufficient exploration of the method in complex waters with multiple interfering ships and static obstacles. Therefore, in this paper, a generation method for a time–space overlapping equivalent static obstacle line for ships in multi-ship encounter scenarios where both dynamic and static obstacles coexist is proposed. By dynamically inferring ships’ encounter situations and considering the requirements of COLREGS, the influence of interfering ships and static obstacles on the navigation of the target ship at different times in the near future is represented as static obstacle lines. These lines are then incorporated into the scene that the target ship encountered at the path planning moment. Subsequently, the existing path planning methods were extensively utilized to obtain the local path. Compared with many common path planning methods in random scenarios, the effectiveness and reliability of the method proposed are verified. It has been demonstrated by experimental results that the proposed method can offer a theoretical basis and technical support for the autonomous navigation of unmanned ships.
1. Introduction
With the rapid advancement of science and technology, increasing attention is being drawn to intelligent navigation technology for ships in the domains of maritime and marine technology. Although progress has been made, challenges still exist [1]. Extensive research has been conducted by scholars worldwide on local path planning, which is a critical component of ship intelligent navigation. It involves the analysis and consideration of various environmental information and influencing factors. Difficulties arise in predicting the behavior of interfering ships due to ambiguous descriptions in the International Regulations for Preventing Collisions at Sea (COLREGS), such as “seafarers’ usual practice” and “good seamanship”. As a result, ensuring safe autonomous navigation necessitates addressing various issues in the ship’s local path planning process. Included in these considerations is the design of a path that conforms to the COLREGS, which involves incorporating information on the multiple interfering ships and static obstacles while ensuring effectiveness. Furthermore, it is crucial to scientifically and effectively validate the reliability of the ship’s local path.
Representative studies on the ship’s local path planning are mainly as follows:
To achieve local path optimization for unmanned ships, Almeida et al. [2] employed an onboard video acquisition system to obtain environmental information, construct a map, and assess the danger level based on the distance between the unmanned ship and obstacles. A real-time path planning algorithm for surface unmanned vehicles (USVs) considering angular rate constraints was proposed by Kim et al. [3], and the steering performance of the ship was taken into account. To solve the problem of heading constraint faced by USV during actual navigation, a course-angle-oriented fast-traveling square algorithm (AFMS) was proposed by Liu and Bucknall [4]. In an unknown environment, to achieve dynamic path planning, the wind-driven optimization algorithm was utilized by Pandey and Parhi [5] to optimize and adjust the parameters of the fuzzy controller’s input/output membership function. A multi-layer fast-travel path planning algorithm was proposed by Song et al. [6] for the real-time generation of a USV trajectory in dynamic environments. The planning spatial information and sea surface current information are considered comprehensively. A path-planning method for multiple moving targets in complex water navigation environments was introduced by Du et al. [7]. The method entails the utilization of complex map construction, employing the complexity theory. Furthermore, the A* algorithm is combined with the constructed map to generate an optimal path that minimizes the travel distance and prevents local minima. An approach for optimal path selection in ship navigation, aimed at ensuring ship stability, was proposed by Krata and Szlapczynska [8]. In this approach, the method of equivalent eccentric height is employed to simulate waves’ natural rolling period, establishing the resonant motion of ships as the basis for dynamic path optimization. Ship collision avoidance was transformed into an optimal control problem by Kozynchenko et al. [9]. They formulated a nonlinear three-dimensional ship dynamic motion model and validated the efficacy of the proposed method in a two-ship intersection scenario. A ship’s path optimization method based on three-dimensional dynamic programming was proposed by Zaccone et al. [10]. The method incorporates meteorological conditions and takes into account the ship’s motion performance and the resistance caused by waves. It parameterizes the sailing process into a multi-stage decision-making process, calculates the seaworthiness of each segment, and enables dynamic path planning. The velocity barrier method was combined with an enhanced artificial potential field algorithm by Song et al. [11]. They established the velocity vector relationship between the ship and the obstacle by generating a complex potential field around the obstacle. The collision between the ship and the obstacle was prevented by utilizing the repulsive and centrifugal potential fields. Ma et al. [12] took the influence of obstacles and ocean currents into consideration, transformed the path planning problem of USVs into a problem about multi-objective nonlinear optimization, which is constrained by collision avoidance, moving boundary and speed, and sought the optimal path length, smoothness, economy, and safety, and solved it. Song et al. [13] proposed an improved A* algorithm. Three path-smoothing devices are used to smooth the path. The performance of the improved A* algorithm is compared with the performance of the traditional A* algorithm.
In recent years, by reviewing the existing commonly used research methods and classical algorithms, and based on multi-modal constraints, the path planning research was divided by Zhou et al. [14] into three aspects: path planning, motion planning, and trajectory planning. The problems in existing research were analyzed, and suggestions for future research were put forward. Yan et al. [15] proposed a path-planning method based on anisotropic Fast Marching. The method combines a repulsive force field and joint potential field to estimate the navigation cost, and optimizes the path using expert knowledge to effectively avoid dynamic and static obstacles. The simulation results demonstrate the method’s effectiveness in path planning for busy waters. Vagale et al. [16] examined the current research on the path-planning of unmanned ships and introduced a Guidance, Navigation, and Control (GNC) algorithm. A local path optimization method for unmanned ships was proposed by Wang et al. [17] based on particle swarm optimization (PSO) calculation and dynamic optimal control to ensure the dynamic optimization of the cruise path of unmanned ships under time-varying conditions. A multi-subjective artificial potential field algorithm was proposed by Sang et al. [18] to enhance the conventional method for local path planning of unmanned vehicle formation. This algorithm ensures path continuity and smoothness while considering the dynamic characteristics of unmanned vehicles. A method based on Deep Reinforcement Learning (DRL) and Artificial Potential Field (APF) algorithms was proposed by Li et al. [19], and it is pointed out that in future work, the influence of uncertain environmental factors should be considered. A path planning method was proposed by Krell et al. [20] combining PSO and a visibility graph, and optimized the path according to energy efficiency and reward function. An improved BA* algorithm for the path planning of unmanned surface ships in coverage scenarios was proposed by Ma et al. [21]. The algorithm’s benefits in terms of the path length, number of turns, units, and coverage were experimentally verified. A method for multi-ship swarm path planning based on local sensor information was proposed by Wang et al. [22], achieving collision-free, smooth, and dynamically feasible path generation through dynamic path search and B-spline curve optimization. Yang et al. [23] improved the A* algorithm based on the artificial potential field method to consider the influence of ocean currents and static obstacles on path planning, and smoothed the generated paths. Given the focus on constant flow conditions, further research efforts are required for practical applicability.
In the ship’s local path planning process, the incorporation of COLREGS is crucial to ensure coordinated actions and navigation safety. Consequently, some scholars have conducted research on ships’ local path planning methods with a greater emphasis on COLREGS constraints. Naeem et al. [24] proposed a reactive path planning algorithm that takes into account ship dynamics, COLREGS constraints, and dynamic and static obstacles. A collaborative path planning algorithm was proposed by Tam and Bucknall [25], which considered the requirements of collision avoidance rules, output consistency, path applicability, and computational performance. Taking COLREGS requirements into account, a trajectory planning method based on the Ant Colony Algorithm (ACO) was proposed by Lazarowska [26] in a dynamic environment. A three-degree-of-freedom ship dynamic path planning method was proposed by Candeloro et al. [27] based on the Voronoi Diagram under the conditions of complying with COLREGS. However, when static or dynamic obstacles are detected, the path will be replanned to avoid obstacles. To address the real time, smoothness, and seaworthiness requirements of generating an initial reference path in a cluttered environment, Shi et al. [28] introduced a hybrid A* algorithm with initial motion constraints. Additionally, the algorithm automatically computed the return path while considering both COLREGS and the vehicle’s motion characteristics. Lyu and Yin [29] proposed an improved artificial potential field, and based on this, proposed a real-time path planning method for unmanned ships within a complex dynamic navigation environment. The method takes into account dynamic and static obstacles, collision avoidance rules, and the uncertainty of other ship actions. Zaccone et al. [30] proposed a method of introducing COLREGS constraints into the ship path planning process from the perspective of two ships encountering, and demonstrated the applicability of the method proposed to the Rapidly Exploring Random Tree (RRT) algorithm through some test examples. The optimal path planning algorithm proposed by Zaccone, R. [31] is based on RRT* and has been combined with guidance and control modules to achieve ship maneuverability. The algorithm’s collision avoidance performance, compliance with COLREGS, path feasibility, and optimality are thoroughly discussed and verified through simulation. Long et al. [32] introduced a hybrid bacterial foraging optimization algorithm that incorporates a simulated annealing mechanism while considering COLREGS constraints and dynamic obstacle constraints. The effectiveness of the algorithm was evaluated through numerical simulation analysis and computer simulation experiments. While previous studies have explored the incorporation of COLREGS in path planning algorithms, a comprehensive review of path planning algorithms for Maritime Autonomous Surface Ships (MASS), with a specific focus on navigation safety, was conducted by Öztürk et al. [33]. Their study highlighted that existing research has not fully addressed the issue of COLREGS compliance in path planning. This identifies a promising avenue for future investigations.
The above-mentioned path planning research can be categorized into five main groups: traditional algorithms, graphics-based methods, sampling-based techniques, intelligent bionic algorithms, and other approaches (e.g., simulated annealing and reinforcement learning). The first four algorithm types, along with their respective advantages and disadvantages, are presented in Table 1, accompanied by relevant literature references.

Table 1.
Classification and characteristics of common local path planning algorithms.
It is apparent that existing local path planning methods for ships inadequately consider navigation situation analysis for the target ship in complex multi-ship encounter situations that involve both multiple dynamic and static obstacles. In the entire process of local path planning, there has been relatively little research utilizing logical flow to ensure that collision avoidance strategies align with COLREGS, and it has not received sufficient attention. The “situation” mentioned here is the ship group situation which means the states and situations constituted by the deployment and actions of all traffic entities in the interest-perception area of the ship. The interest–perception area means the region within a certain distance (set as 6 n miles in this paper) around the target ship. For analytical simplicity, in this paper, dynamic and static obstacles, as well as other ships only within the surface regions of the interest–perception area of the target ship are primarily considered. The objective of this study is to explore a ship local path planning method that can be applied to multi-ship encounter scenarios with both multiple dynamic and static obstacles coexisting, which also employs dynamic inference of the target ship’s navigation situation and carefully accounts for COLREGS requirements. We hope that the findings offer a better interpretable theoretical reference for unmanned ships’ autonomous local path planning process.
To facilitate the presentation of the research process and results as the main focus inn multi-ship encounter scenarios, in this article, the own ship is defined as the target ship (TS), and all other ships that may affect the navigation of the TS are defined as interfering ships (ISs).
In this paper, a generation method of a time–space overlapping equivalent static obstacle line is proposed for the multi-ship encounter scenario where multiple dynamic and static obstacles coexist, and the concrete logic flow chart of the method is provided. Based on the dynamic inference of the encounter situation of the ship and considering the requirements of COLREGS, the influences of interfering ships and static obstacles on the navigation of target ships at different times in the near future are equivalent to static obstacle lines, and are presented in the scenario that the target ship encountered at the path planning moment. By making full use of existing path planning methods, the local path planning of unmanned ships based on situation inference and COLREGS constraints is realized. Simulation and comparative experiments with many kinds of common path planning methods are conducted in random scenarios to validate the effectiveness and reliability of the proposed method.
The remaining portion of the article is organized mainly as follows. The proposed local path planning method and its construction logic flow chart are presented in Section 2. In Section 3, the verification experiment procedure, parameter settings, and results are provided. The analysis of the experimental results and the discussion of the study’s limitations are provided in Section 4, followed by the conclusion presented in Section 5.
2. Materials and Methods
In this section, initially, an explanation of the multi-ship encounter scenarios involving both multiple dynamic and static obstacles is provided. Subsequently, the general idea of local path planning of the target ship is presented. In subsequent sections, focusing on the key components of the proposed idea, the specific methods proposed and their implementation approaches are elucidated.
2.1. Multi-Ship Encounter Scenario in which Multiple Dynamic and Static Obstacles Coexist
It is common for multiple dynamic and static obstacles to coexist in multi-ship encounter scenarios, for example, in busy waterways, ocean-going ships, freighters, fishing boats, buoys, lighthouses, shipwrecks, and so on. At this time, to ensure the coordination of actions between ships, all ships shall, as far as possible, take appropriate actions by the requirements of the COLREGS to ensure the safety of navigation. When the target ship faces a potential collision risk without immediate urgency, sufficient time is typically available to plan a safe local path to avoid collision. Therefore, based on the multi-ship encounter scenario where multiple dynamic and static obstacles coexist, the method of local path planning for ships is studied in this paper.
2.2. General Idea of Local Path Planning of the Target Ship
To plan the local path of the target ship, it is necessary to ensure that all static obstacles can be effectively avoided by the planned path (including static ships), which can be easily achieved by the existing algorithm. Secondly, it is necessary to make sure that other ships can be effectively avoided by the planned path at the same time, which needs to predict or obtain in advance the next behavior of other ships in the near future, ultimately ensuring that the above avoidance behavior is consistent with the relevant provisions in COLREGS as much as possible, which requires the analysis of the encounter situation of the target ship and the selection of the navigation strategy in line with COLREGS.
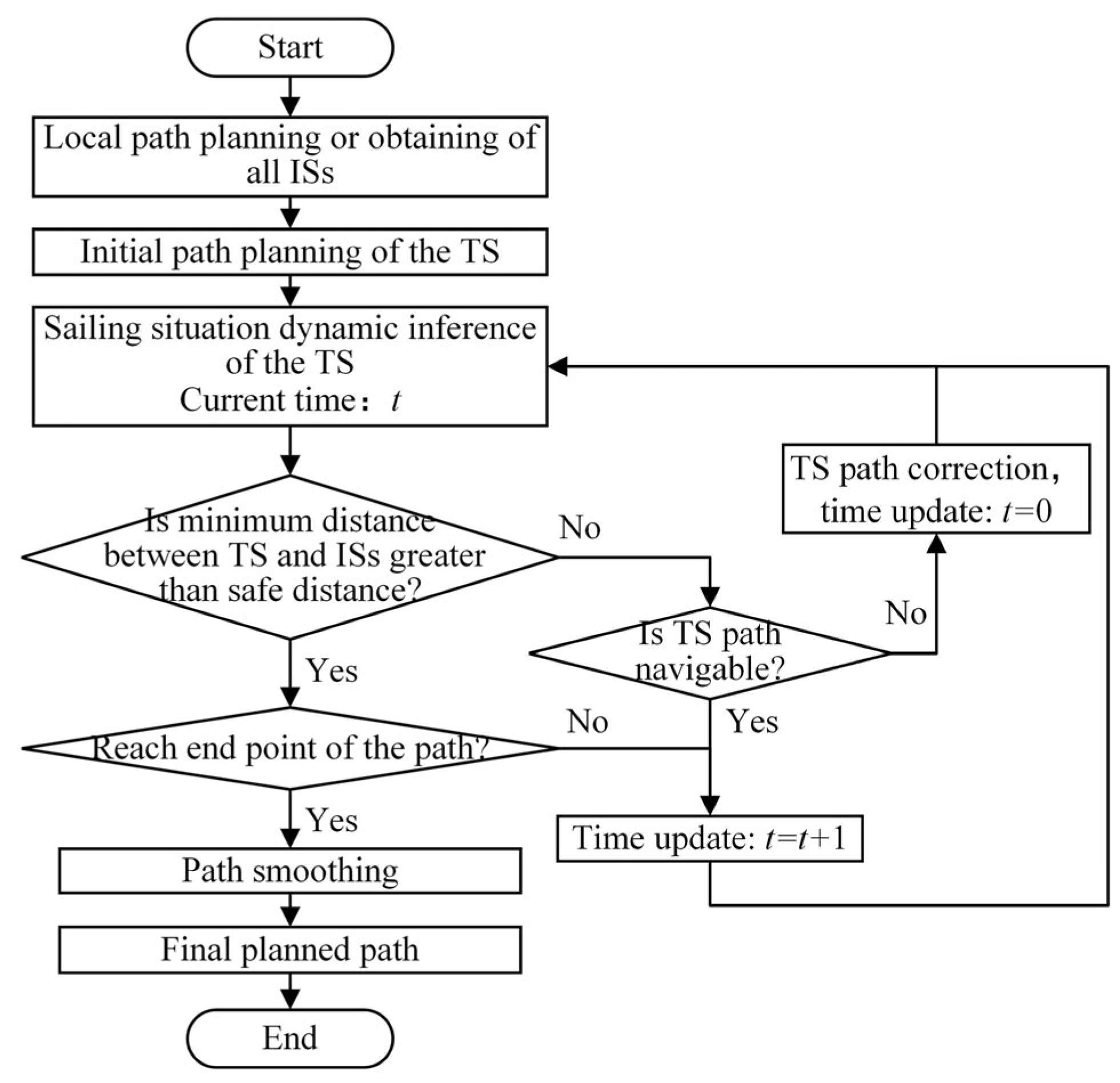
Therefore, the general idea of path planning for the TS in this paper is mainly as follows. At first, local path planning is performed for all interfering ships within a certain area (12 n miles selected in this study) surrounding the line connecting the starting point and the endpoint of the target ship, as for the prediction of interfering ships’ behaviors. Existing path planning algorithms will be selected, ensuring avoidance of static obstacles and other ships at the time. Alternatively, the local routes of partial or all interfering ships are already known, and only that of the remaining unknown interfering ships are planned. An initial path for the target ship is planned using the same algorithm as that of the interfering ship, effectively avoiding static obstacles. The target ship’s encounter situation is dynamically inferenced along the initial path, considering COLREGS requirements and maintaining a safe distance from interfering ships. If, at a given moment, the distance between the TS and an interfering ship is less than a certain safety distance, the current situation is analyzed, and based on the requirements of COLREGS, an assessment is made regarding the navigability of the target ship’s path. If the path does not comply with COLREGS under the current situation, it will be corrected. This process will be repeated until the TS is at a safe distance from all of the other ISs or the path is consistently navigable to reach the end. Finally, the obtained path is smoothed and taken as the final local path of the target ship. The overall flow of the target ship’s local path planning is illustrated in Figure 1.
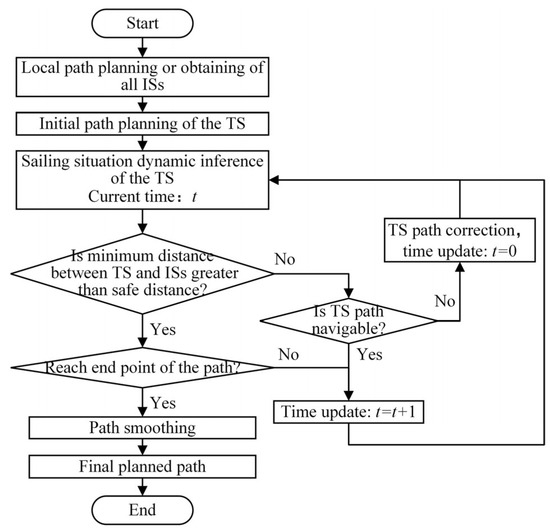
Figure 1.
Overall thinking flow of the target ship’s local path planning.
2.3. Local Path Planning Method of Interfering Ships
From the perspective of the target ship, the interfering ship is more inclined to choose a shorter path that can avoid all obstacles and ships. Therefore, in this paper, the interfering ship path planning algorithm still adopts the existing algorithms, such as the algorithm based on graphics, and regards other ships as equivalent obstacles, and the obstacle area is the ship domain of the corresponding ship.
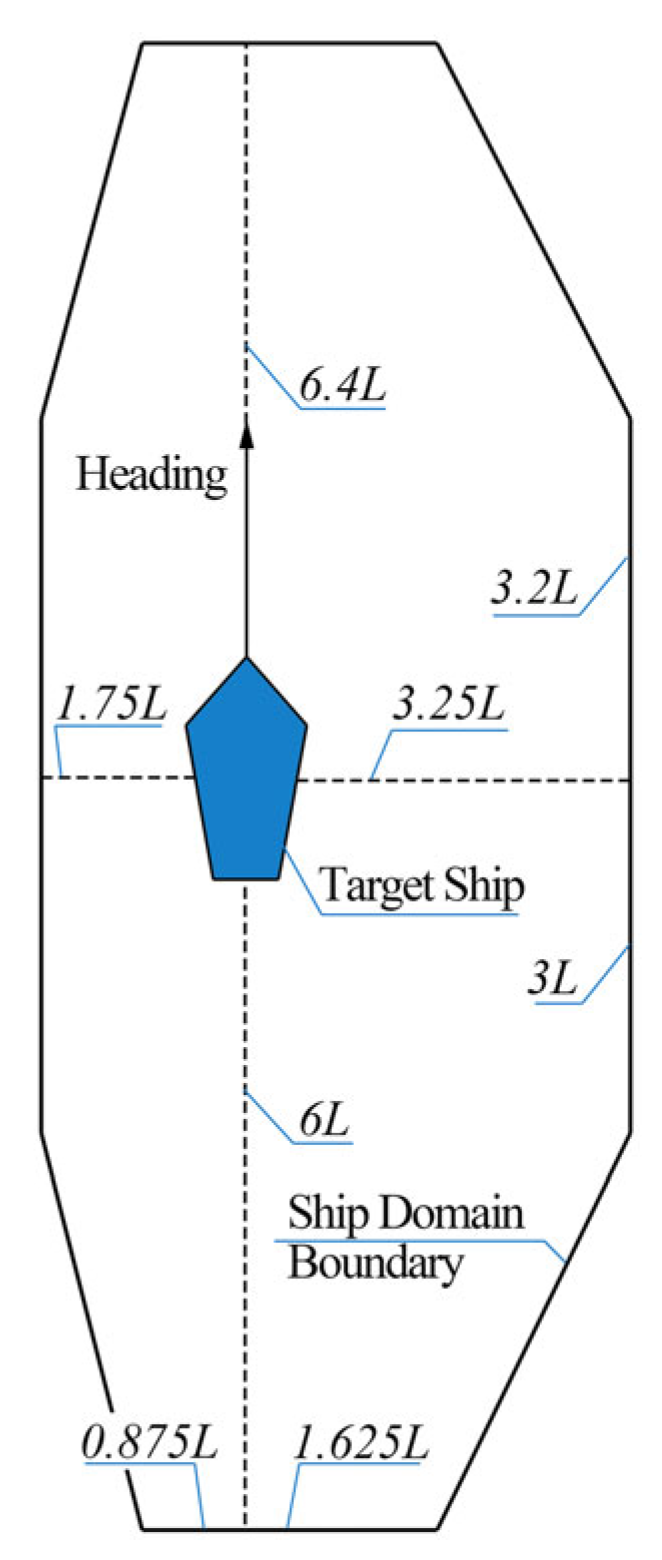
Combined with existing research on the ship domain [34,35] and considering the complexity of the study and safety of ship navigation, the ship domain is simplified into a hexagon, selecting larger parameter values. The ship domain refers to the water area around a ship where other ships are preferably avoided to ensure safe navigation. Let the length of the ship be denoted by L. The equivalent front half-shaft length is 6.4 times the ship’s length (6.4 L), the equivalent rear half-shaft length is 6 L, the equivalent left half-shaft length is 1.75 L, and the equivalent right half-shaft length is 3.25 L. The simplified ship domain is illustrated in Figure 2.
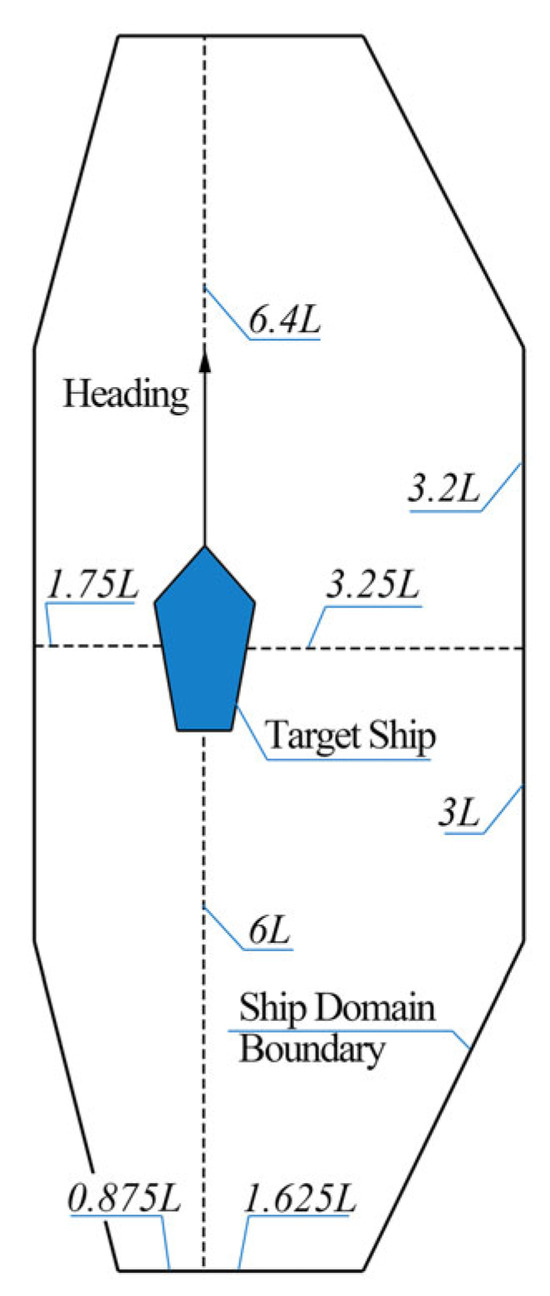
Figure 2.
Schematic diagram of the ship domain.
2.4. Smooth Processing of Interfering Ship’s Local Path
The local path of the interfering ship, gained by the path planning algorithm, comprises a series of contiguous straight-line segments. To improve the path’s adherence to the ship’s motion principle, the path is smoothed. Specifically, at the junction of two straight lines, a smooth transition is achieved by introducing an arc with a specific radius. To simplify the analysis, the ship is assumed to maintain full speed during turning, and follows an arc [36]. The turning radius of the ship is calculated by multiplying a relaxation coefficient by the longitudinal distance covered during a full-rudder turn, as presented in Equation (1):
where represents the turning radius of the ship in meters and stands for the longitudinal distance traveled when the ship’s course turns 90° in meters. Based on the IMO Resolution A.749(18) and sea trial experience, is equated to times the ship’s length in this study. Additionally, denotes the relaxation coefficient, which is set at 1.2 for this research.
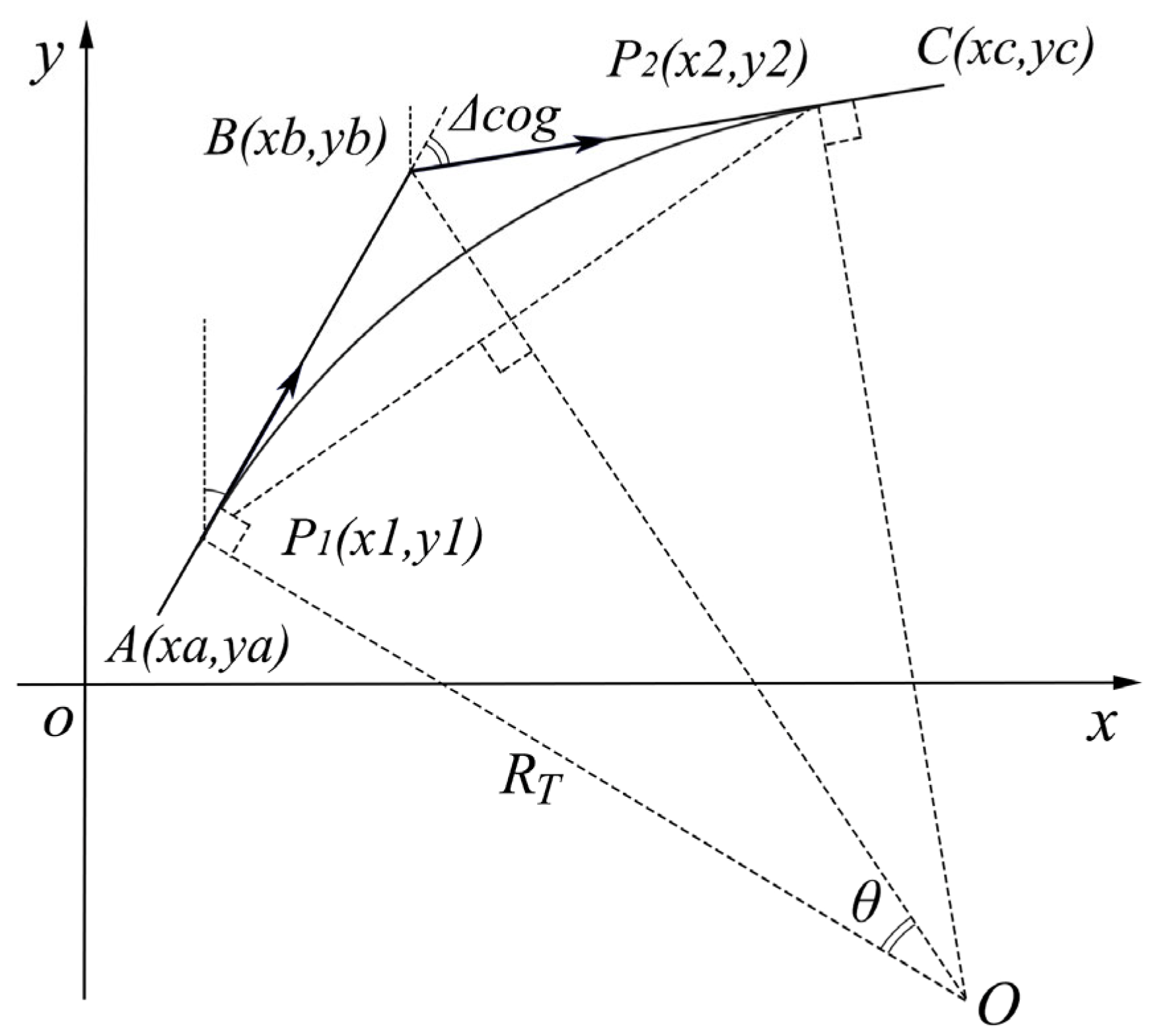
In Figure 3 below, a certain path is taken as an example. The coordinates of the three nodes are , , and , and the coordinates of the two tangent points are and , respectively. According to the geometric relationship, the size of the center angle corresponding to the excessive arc is equal to the size of the ship’s course change angle .
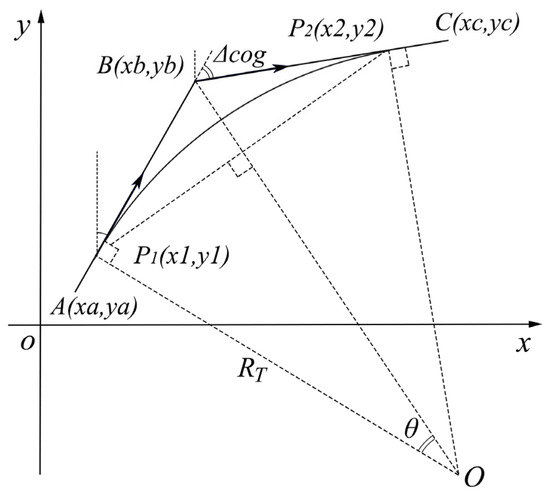
Figure 3.
Smoothing of the path.
can be calculated according to the relationship between the ship’s course angle before and after turning. The calculation method of the ship course angle (unit: ) is shown in Equation (2), where denotes the course angle corresponding to vector , denotes the course angle corresponding to vector , and the calculation method of is shown in Equation (3).
where, when , to avoid a denominator of zero, .
The calculation method of the center half angle corresponding to the arc is shown in Equation (4).
The distance between the starting point of the arc and the inflection point is calculated according to the trigonometric function relationship, as shown in Equation (5).
The coordinates of the starting point P1 of the circular arc can be obtained by the proportionate relationship of the segment lengths, as shown in Equation (6). Where, represents the Euclidean distance between points A and B.
Similarly, the coordinates of endpoint of the arc can be obtained.
The number of circular arc intermediate nodes is determined according to the interpolation accuracy. Here, interpolating once every center angle of is taken as an example, and the coordinates of the next interpolation node can be obtained through the rotating of the previous interpolation node about the center of the arc circle. Therefore, the center coordinates need to be calculated first. The line segment and are regarded as vectors and , respectively, and the orientation of the circle center relative to can be obtained from the property of the cross product of the vectors. The calculation method is shown in Equation (7).
where is the vector product of vector and vector . When , the center of the circle is to the left of the vector . When , the center of the circle is to the right of the vector . When , two vectors are collinear or at least one of them is the zero vector.
Then, from the starting point of the arc, the unit vector of the vector is rotated around the starting point of the arc in the direction of the center of the circle, and the unit vector pointing to the center of the circle is obtained. Multiplied by the radius length, the coordinates of the center of the circle can be obtained. The specific calculation method is shown in Equation (8).
The starting point of the arc rotates around the center of the circle to obtain the coordinates of the next interpolation point , as shown in Equation (9).
where is the vector from the center of the circle to the start of the arc.
2.5. Local Path Detection and Correction Method of the Target Ship
According to the general idea of local path planning of the target ship proposed above, the next step is to realize the detection and correction of the target ship’s path according to the requirements of COLREGS and the effect of static obstacles on its navigation.
2.5.1. Logical Flow of Local Path Detection and Correction of the TS
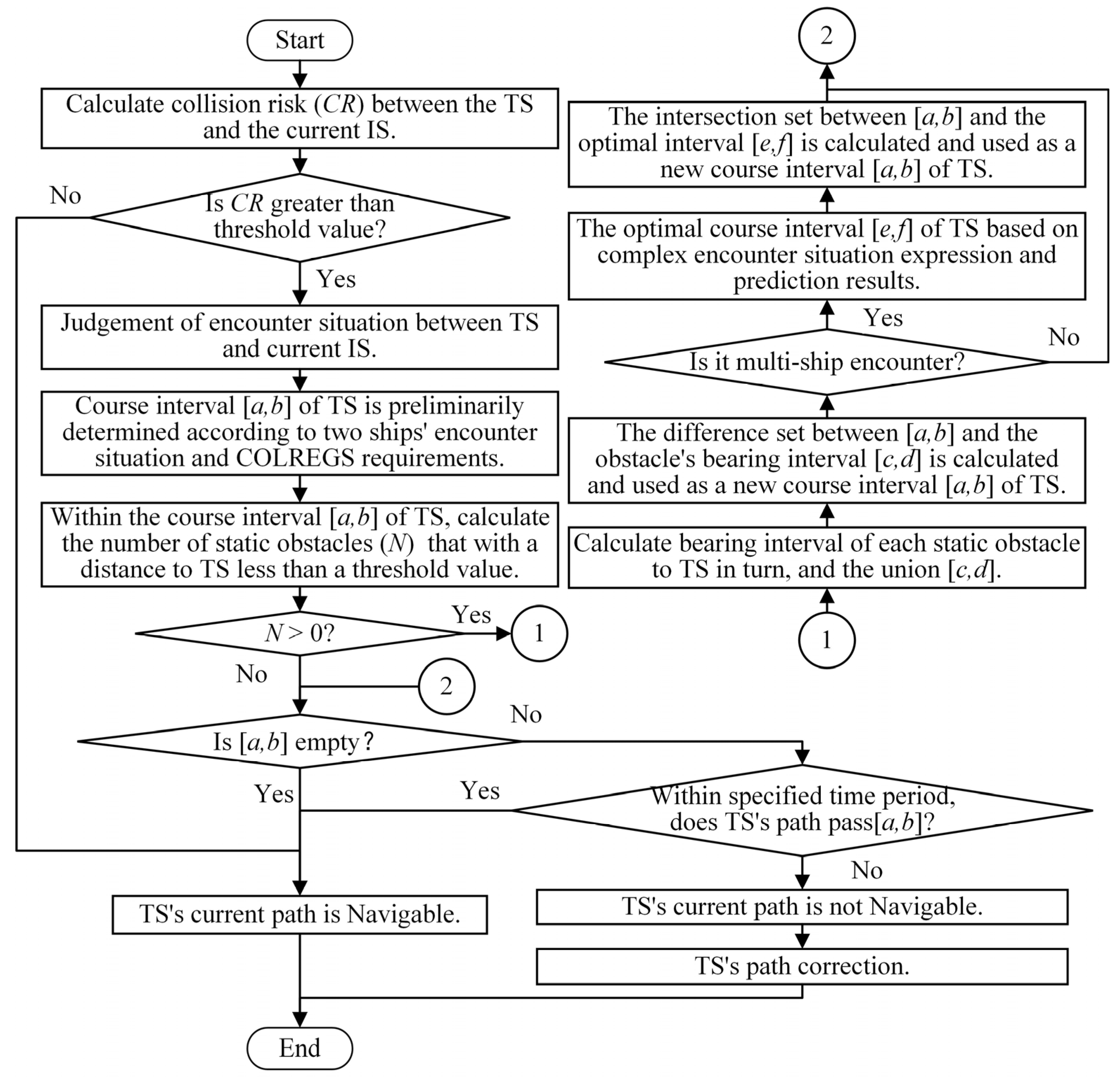
According to the target ship’s path planning approach, when the distance between the TS and an interfering ship is within the specified safety distance at a given time, the target ship’s encounter situation should be analyzed and the navigability of the current path segment should be assessed. Based on the condition of the two ships’ collision risk [37], encounter situation, and COLREGS requirements, the potential course interval of the target ship is preliminarily determined. Additionally, taking into account the influence of static obstacles and the relative position of the TS’s local target point, the course interval is further narrowed down. If the target ship is currently in a multi-ship encounter situation, it is necessary to further compress the course interval of the target ship by combining the complex encounter situation expression and prediction [38] results based on bounded rational game. If the original path falls within this narrowed course range, no immediate course correction for the target ship is needed. Otherwise, a correction is required. The detailed logical flow is depicted in Figure 4.
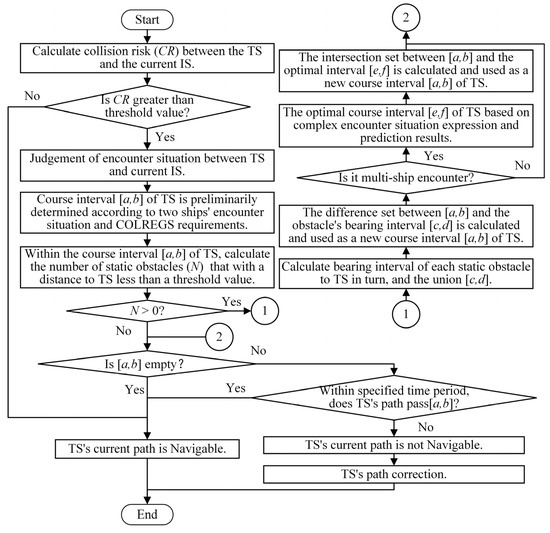
Figure 4.
Logical flow chart of determining the navigability of the TS’s local path.
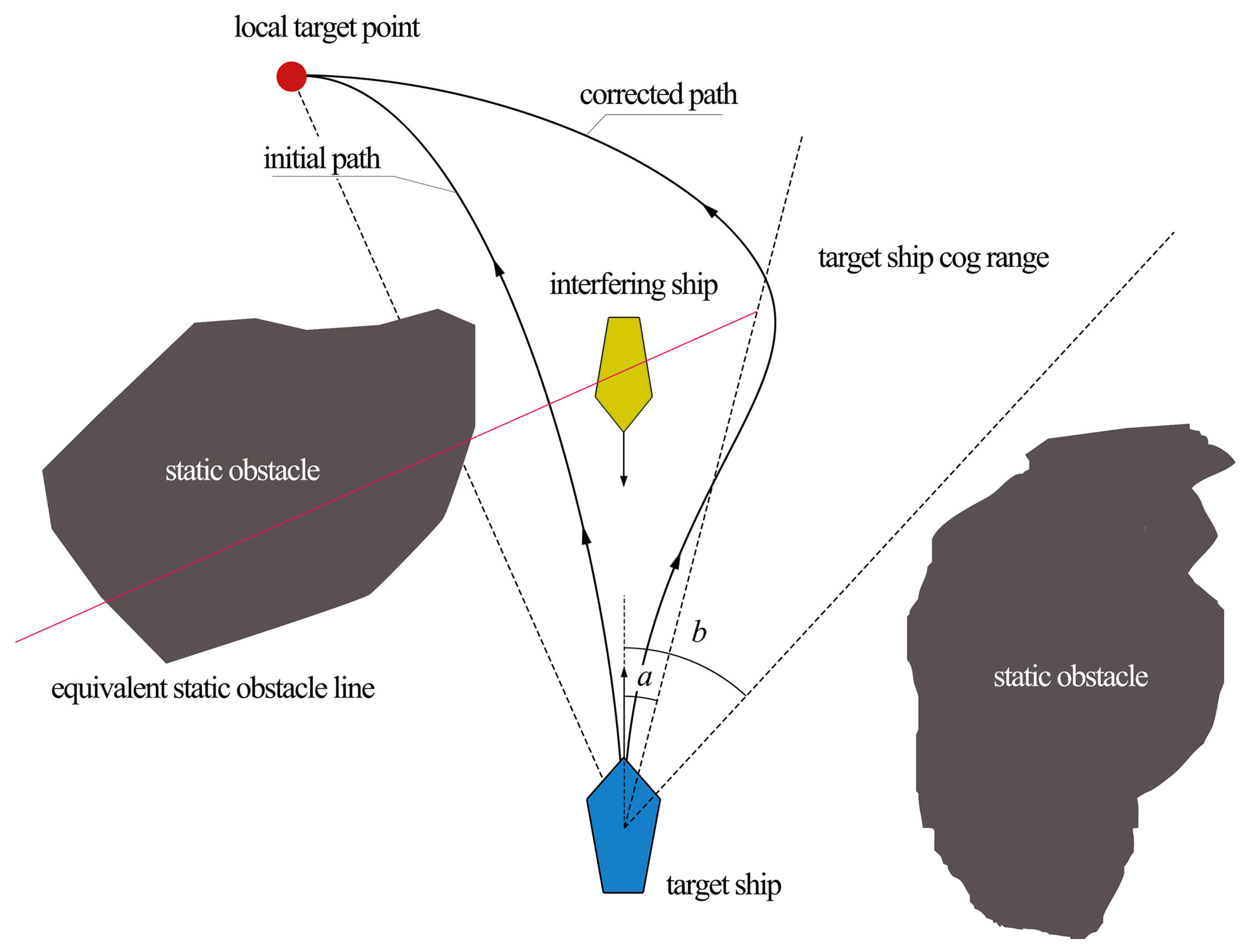
Based on the aforementioned logical flow, if the current path segment of the target ship is deemed unnavigable, it needs to be corrected. To achieve this, a method that generates time–space overlapping equivalent static obstacle lines based on situation inference is proposed. Essentially, the obstructive impact of interfering ships and static obstacles on the target ship’s navigation can be represented as one or more line segments within the scenario at the path planning moment. For instance, considering the logical flow in Figure 4, the suitable target ship course interval was determined. At this stage, the generation method for equivalent static obstacle lines for the TS is illustrated in Figure 5, taking the two-ship encounter situation as an example. As presented in Figure 5, the initial path of the target ship does not adhere to the avoidance responsibilities and obligations described in COLREGS for encounter situations. Sailing along this original path would increase the risk of collision or even result in accidents. However, by representing the influence of interfering ships and static obstacles as equivalent static obstacle lines, the planned path will not only effectively help avoid obstacles, but also ensure that the target ship’s navigation strategies comply with COLREGS. The process of determining navigability and correcting the target ship’s path segment is repeated continuously during the situation inference of the target ship until the entire path is deemed navigable, thus completing the target ship’s path correction.
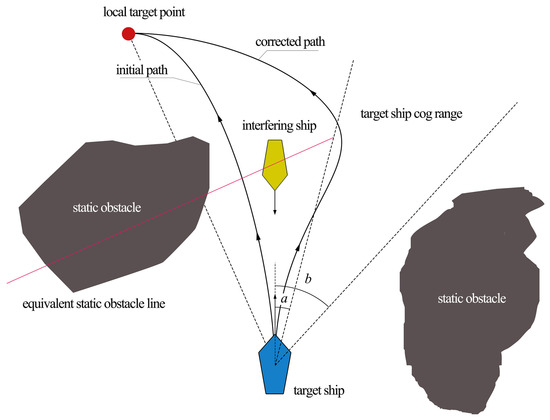
Figure 5.
Schematic diagram of the equivalent static obstacle line generation method.
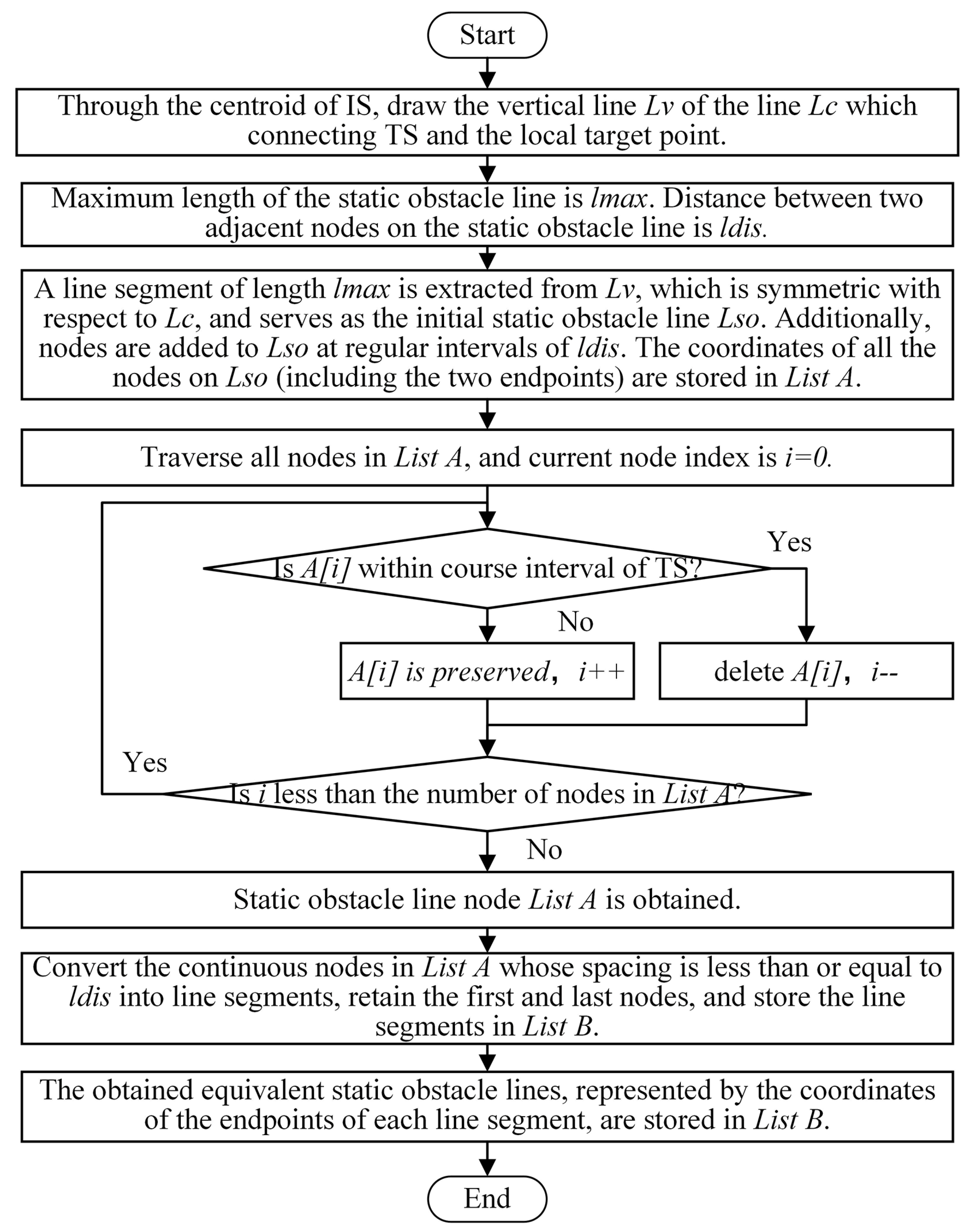
In Figure 5, the red line segment is an equivalent static obstacle line, which consists of a line segment perpendicular to the line between the TS and the local target point, and passes through the position of the interfering ship. In this line segment, the part contained in the course interval of the target ship is deleted. The logical flow chart of the equivalent static obstacle line’s construction method is shown in Figure 6. In multiple-ship encounter situations, the form of the equivalent static obstacle line is similar to that of a two-ship encounter. The difference lies in the calculation of the target ship’s course interval, which is derived from the expression and prediction methods of complex encounter situations. Moreover, the equivalent static obstacle line intersects with the interfering ship which poses the highest collision risk with the TS. Therefore, the construction method is essentially the same.
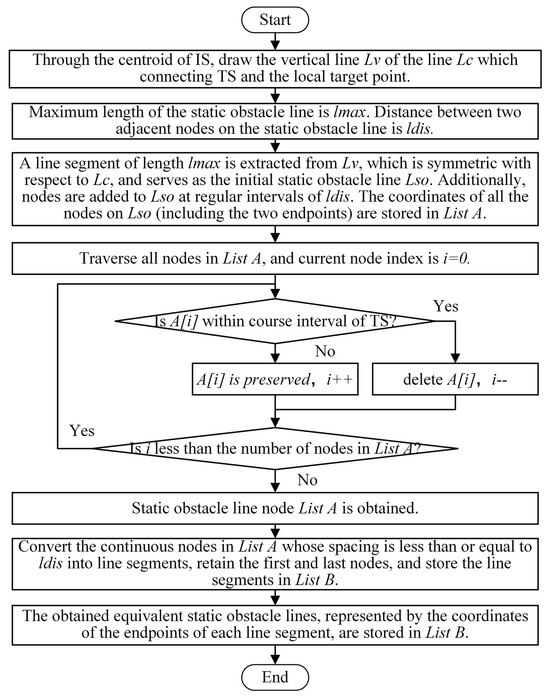
Figure 6.
Logical flow chart of the equivalent static obstacle line generation method.
2.5.2. Smooth Processing of the Target Ship’s Local Path
For the smooth processing of the target ship’s local path, in addition to adopting the method used for the interfering ship in Section 2.4, the local path is divided into two parts to ensure that the sailing direction at the path’s start point is consistent with the current course of the target ship. The first part is from the current position of the target ship to position , which is distance forward along the target ship’s current course. The second part is from to the final position of the target ship’s local path. The first part ensures that the initial segment of the planned path can conform to the ship’s movement law. Finally, the method described in Section 2.4 is adopted to smooth the entire path.
3. Results
To verify the effectiveness and reliability of the local path planning method proposed in this study, it is compared with many common path planning methods, and the effectiveness of the method is verified by comparing and analyzing the characteristics of the path. The reliability is verified by the comparative analysis of the navigation conditions of ships along different local paths. In view of the high cost and risk of scenario construction of multi-ship encounter experiments, the simulation experimental method is temporarily adopted.
The basic idea of this experiment is mainly as follows. The proposed method is verified mainly from two perspectives. On the one hand, it is assumed that all interfering ships in encounter scenarios utilize the A* algorithm for path planning. The target ship, upon learning about the interfering ships’ paths, adopts different methods to plan its path, avoiding dynamic and static obstacles. A comparative analysis of the planned paths obtained using different methods is conducted to highlight the advantages of the proposed method. On the other hand, to simulate real navigation scenarios more realistically, the target ship, may not know the exact paths of the interfering ships. In this situation, the target ship utilizes the proposed method to plan its local path based on predictions of the interfering ships’ paths (assuming they all utilize the A* algorithm). The interfering ships, on the other hand, randomly select commonly used path planning algorithms to plan their paths. The adaptability of the target ship’s path to uncertain scenarios is analyzed to verify the advantages of the proposed method. To enhance the reliability of the experimental results, multiple random scenarios are set up for each group of experiments.
3.1. Experimental Setting
3.1.1. Experimental Ship and Parameter Setting
In this paper, the following method is adopted to construct a multi-ship encounter scenario involving dynamic and static obstacles: one target ship and four interfering ships are designated, with the interfering ships being randomly positioned within a radius around the target ship. Constraints are applied to ensure that the interfering ships generate in areas that significantly impact the target ship’s navigation. The course setting of the interfering ships is also controlled to form specific encounter situations with the target ship.
The parameters of the TS and ISs are outlined in Table 2. Static obstacles are randomly generated as irregular polygons located farther than distances from all ships. To facilitate the result presentation, the experiment duration is set to min. The local target point of each ship is a coordinate point which is located in the place the target ship will reach in 120 min if the target ship is sailing straight according to its initial position, course, and speed, and it will remain unchanged throughout the simulation.
Table 2.
Parameter setting of the target ship and interfering ships.
The in the table is set for relevant parameters of the interfering ships, which means that the length, width, and speed of the interfering ships fluctuate randomly based on the set value, and the fluctuation range is within . In this way, ships of different sizes and speeds in the scene are simulated, and the uncertainty of the real encounter scene is simulated as much as possible.
3.1.2. Experimental Procedure Setting
To verify the effectiveness of the local path planning method proposed in this paper, the paths obtained by using the proposed method for target ships are compared with those obtained by only using A* (A-Star), Dijkstra, RRT, PRM (Probabilistic Roadmap), PSO, and GA (Genetic Algorithm) algorithm. Four random scenarios are set. According to the basic idea of the control variable method, the A* algorithm is adopted for the path planning of interfering ships. The specific setting is shown in Table 3. Through the consistency analysis of the local path planned by this method with the expected effect and the characteristics comparison analysis of the path planned by other methods, the effectiveness of the proposed method is verified. In the table, represents the local path planning method proposed herein, represents the target ship, and represents interfering ships.
Table 3.
Experimental scenario and scheme setting.
To verify the reliability of the proposed method, simulation experiments were conducted according to the scenarios set in Table 3. In other words, both the target ship and the interfering ships sail according to their own planned paths, and the reliability of the proposed method is verified by comparing several indicators that can present the sailing efficiency and safety of the ship during the voyage.
In addition, in actual sailing scenarios, due to privacy, trade secrets, poor communication, and other reasons, the local paths or the path planning methods that interfering ships adopted are often not directly available. To enhance the realism of the simulation, the path planning methods for interfering ships are randomly assigned. Specifically, the interfering ships randomly select the A*, Dijkstra, RRT, PRM, PSO, or GA path planning algorithms. The target ship adopts the local path planning method proposed. During the target ship’s path planning, it remains unaware of the specific path planning method chosen by the interfering ships. As a provisional assumption, the interfering ships will utilize the A* algorithm for path planning and simulation, resulting in the collection of corresponding navigation indicators for the four scenarios mentioned above. Comparative analysis is conducted to further verify the proposed method’s reliability. To further increase the reliability of the experimental results, six repeated experiments were conducted in each scenario, and the specific scheme settings are shown in Table 4. In the table, “Random” indicates that the interfering ships randomly select one of the six commonly used path planning algorithms mentioned above.
Table 4.
Experimental scenario and scheme setting under uncertain conditions of the interfering ship’s path.
3.2. Experimental Data Processing
The experimental result data included the relevant parameters of all ships (including target ships and interfering ships). Part of the data is extracted and calculated [39] to obtain the data required for the result analysis, which mainly includes the following:
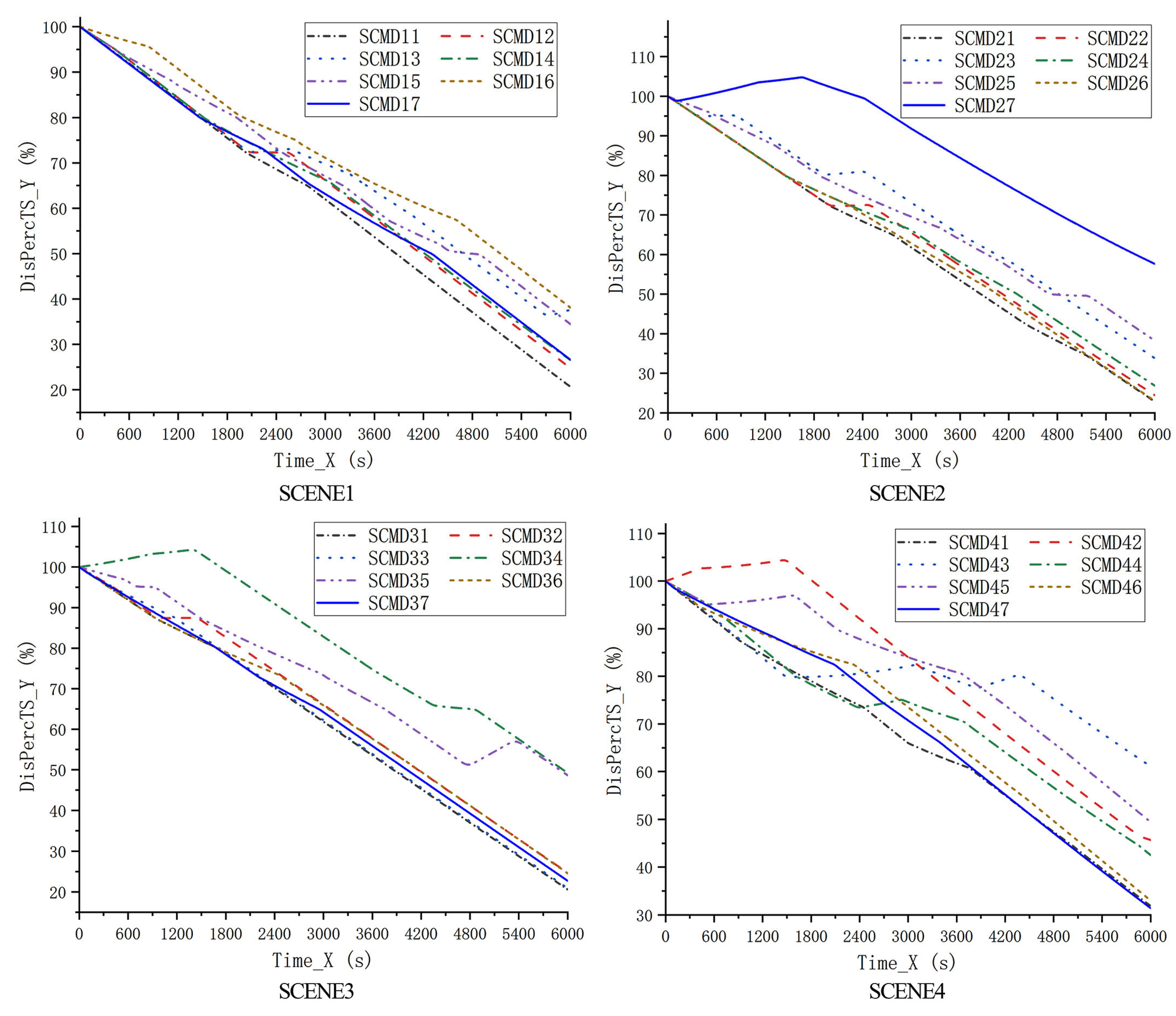
Time series of the distance percentage between the TS and its local target point to its original distance (), which can present the navigation efficiency to a certain extent.
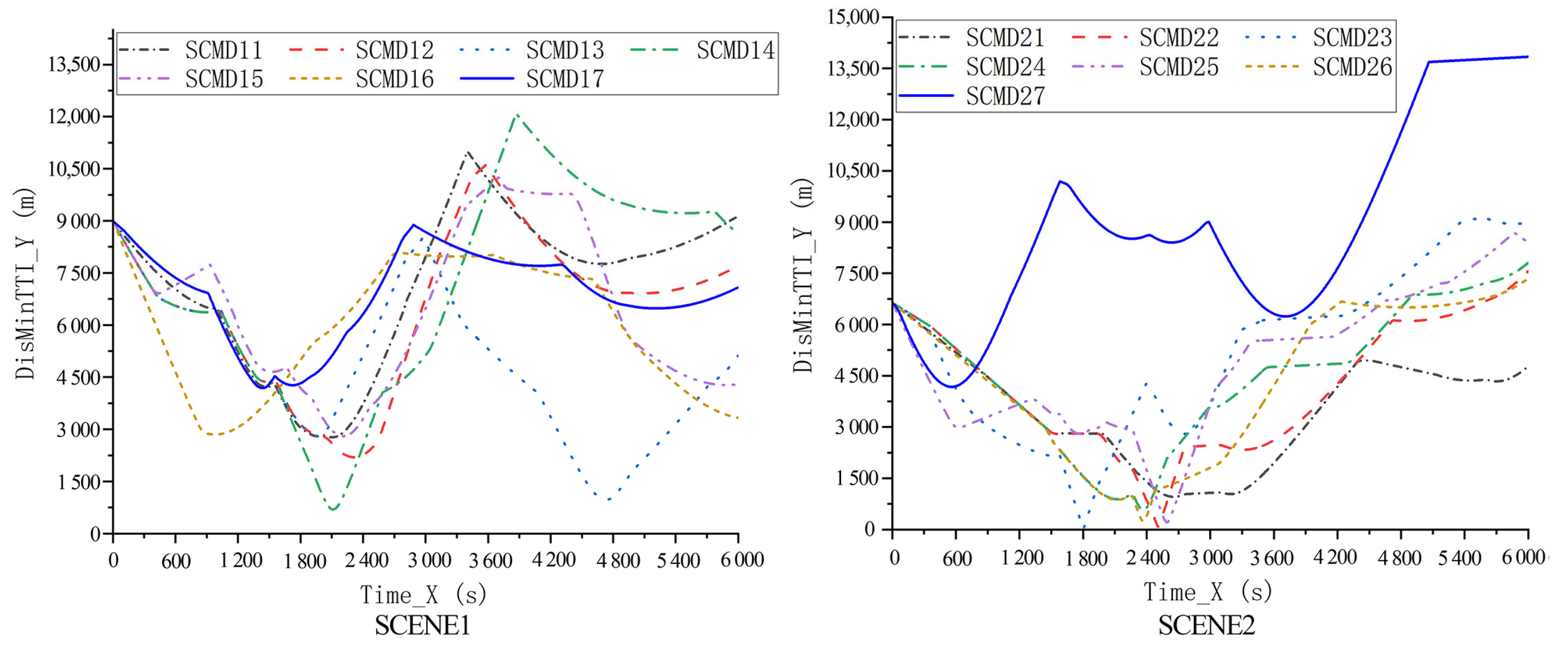
Time series of the minimum distance between the TS and ISs (), which can present the safety of ship navigation to a certain extent.
Time percentage of collision risk with value 1 for each ship (), which can also present the safety of ship navigation to a certain extent.
Taking scheme as an example, the original data recording format of experimental results are shown in Table 5. Due to the large amount of data, only specific time points, , , and , were taken as examples. The table consists of attribute parameters of all ships in the simulation scenario that do not vary with time (first 6 rows, including the title row), followed by the state parameters of all ships at different times. In the experiment, a set of state parameters for all ships was generated every s, as the situation inference duration was set to s. In the actual recording of experimental results, the relevant parameters and state data of the same ship were recorded sequentially in the same row. To facilitate the presentation in the paper, we made some adjustments to the order of the data.
Table 5.
Example of the recording format of experimental result data.
is calculated based on the parameters of the ship. The calculation method is depicted in Equation (10), where indicates the distance between two points; represents the ship’s current coordinate; represents the coordinate of the ship’s local target point; indicates the start coordinate value for calculation of the local target point.
can be obtained directly by comparing experimental data.
is obtained by counting the number of times each ship has a collision risk of 1 during the entire simulation period and then calculating its ratio to total times.
3.3. Experimental Process and Result Presentation
3.3.1. Experimental Process
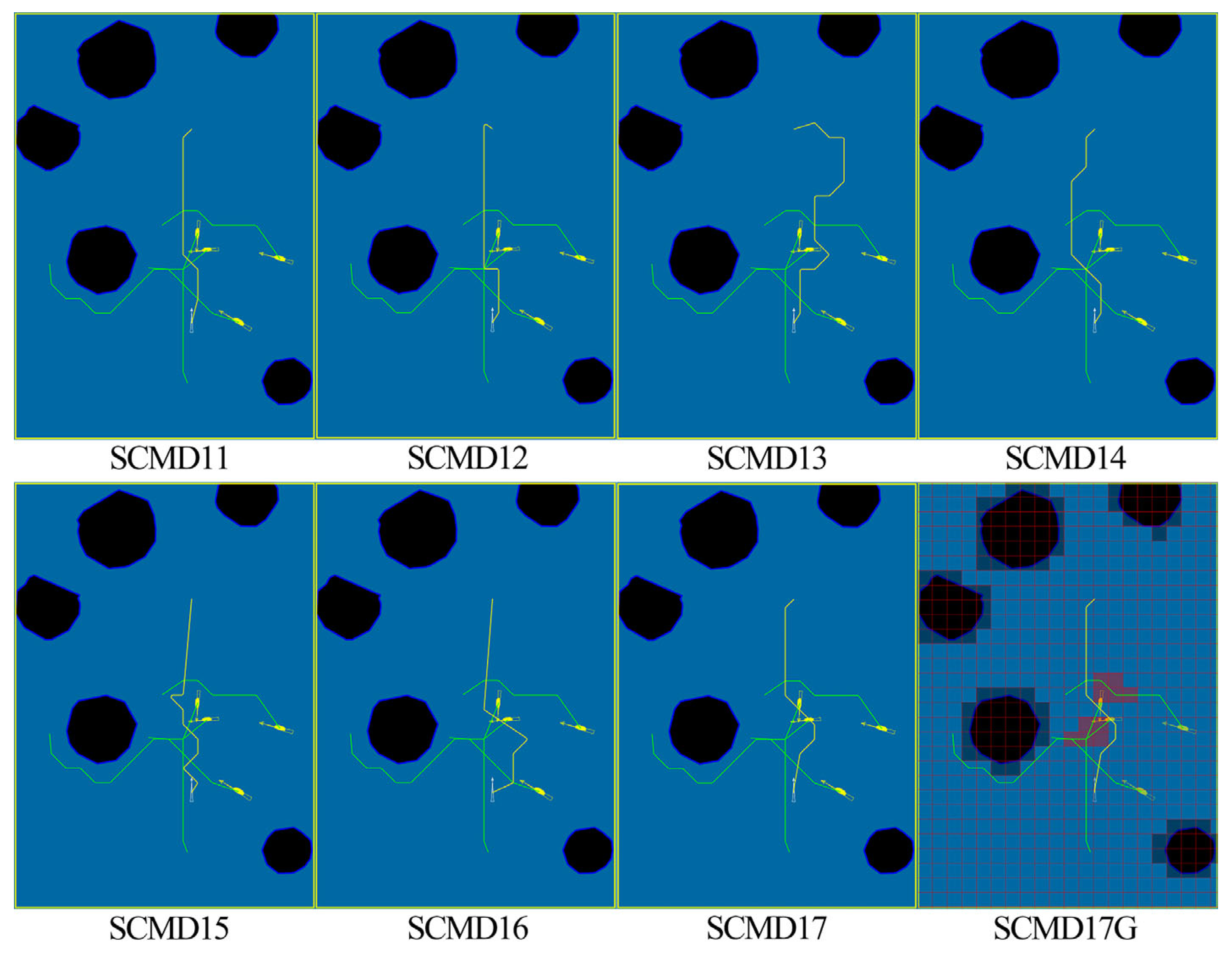
In scenario , according to the experimental scheme, the path planning results are shown in Figure 7. The long white triangle with an arrow in the figure represents the TS, the long yellow triangle with an arrow represents the interfering ship, and the yellow filled area on the interfering ship represents the ship domain of the interfering ship. To present the ship identification in the figure as much as possible, and to maintain certain coordination between the size of the ship and the scene, the display size of the ship in the figure has been uniformly set to times its actual size. The color of the target ship’s planned path is yellow, and that of the interfering ship’s planned path is green. To facilitate the distinction between the TS and ISs on the simulation interface, the TS’s initial course is set to 0 degrees, which corresponds to the upward direction on the simulation interface. The subgraph shows the grid division and equivalent static obstacle lines of the target ship when the path planning method proposed in this paper is adopted. The red grid is the grid occupied by equivalent static obstacle lines.
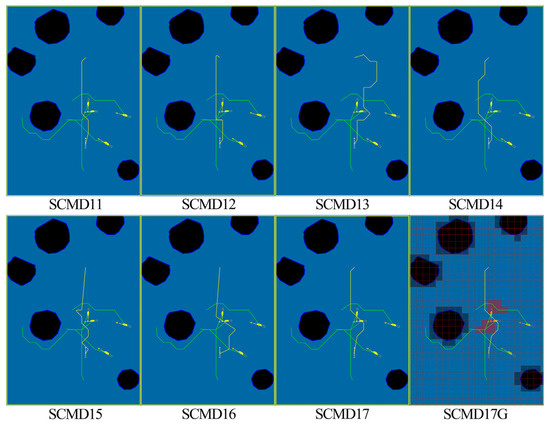
Figure 7.
Path planning results in scenario SCENE1.
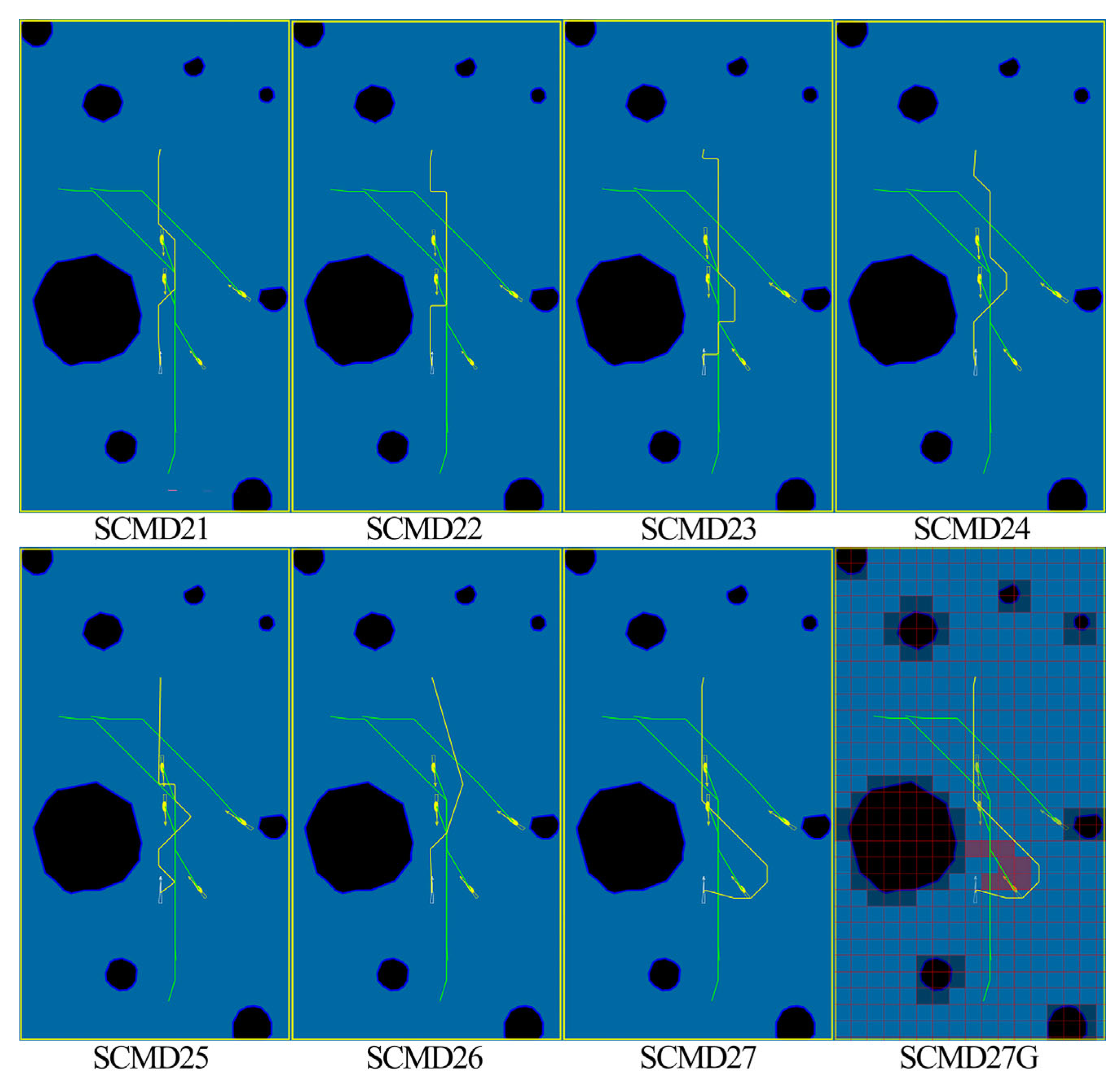
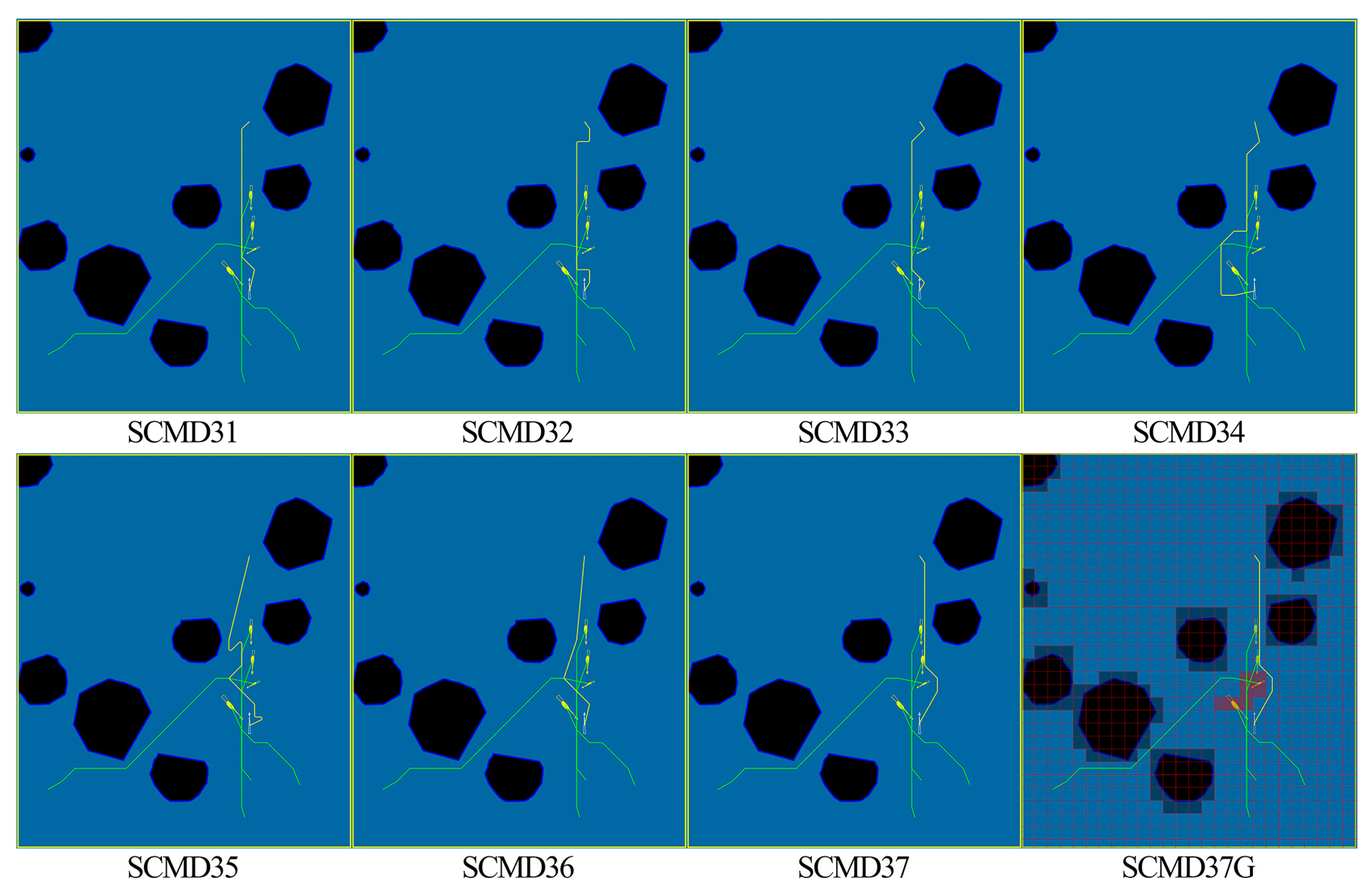
In scenarios SCENE2, SCENE3, and SCENE4, the path planning results are shown in Figure 8, Figure 9, and Figure 10, respectively, according to the experimental scheme.
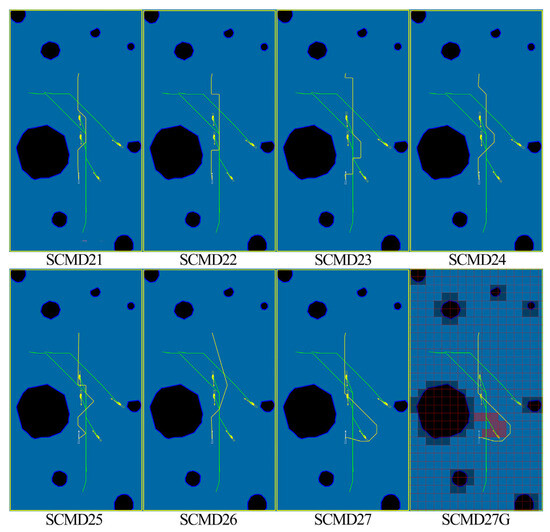
Figure 8.
Path planning results in scenario SCENE2.
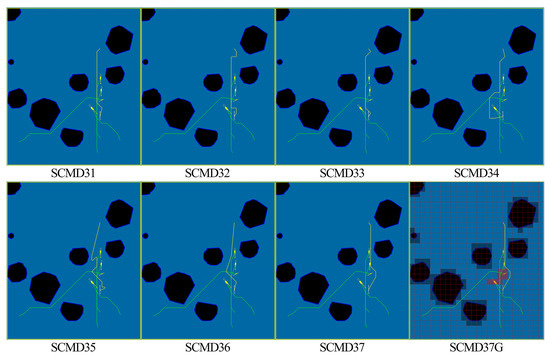
Figure 9.
Path planning results in scenario SCENE3.
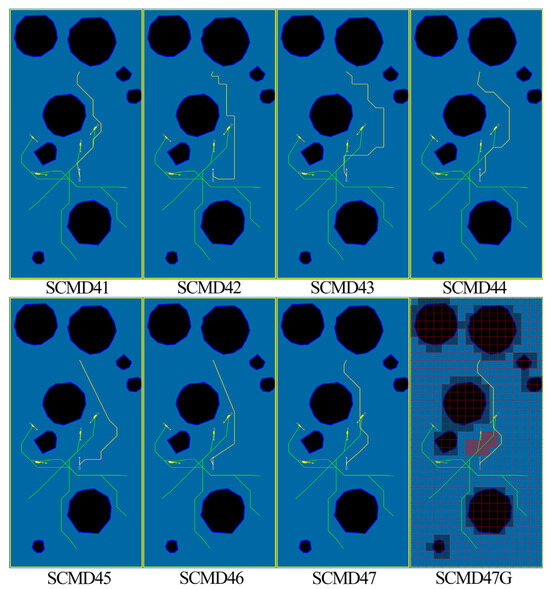
Figure 10.
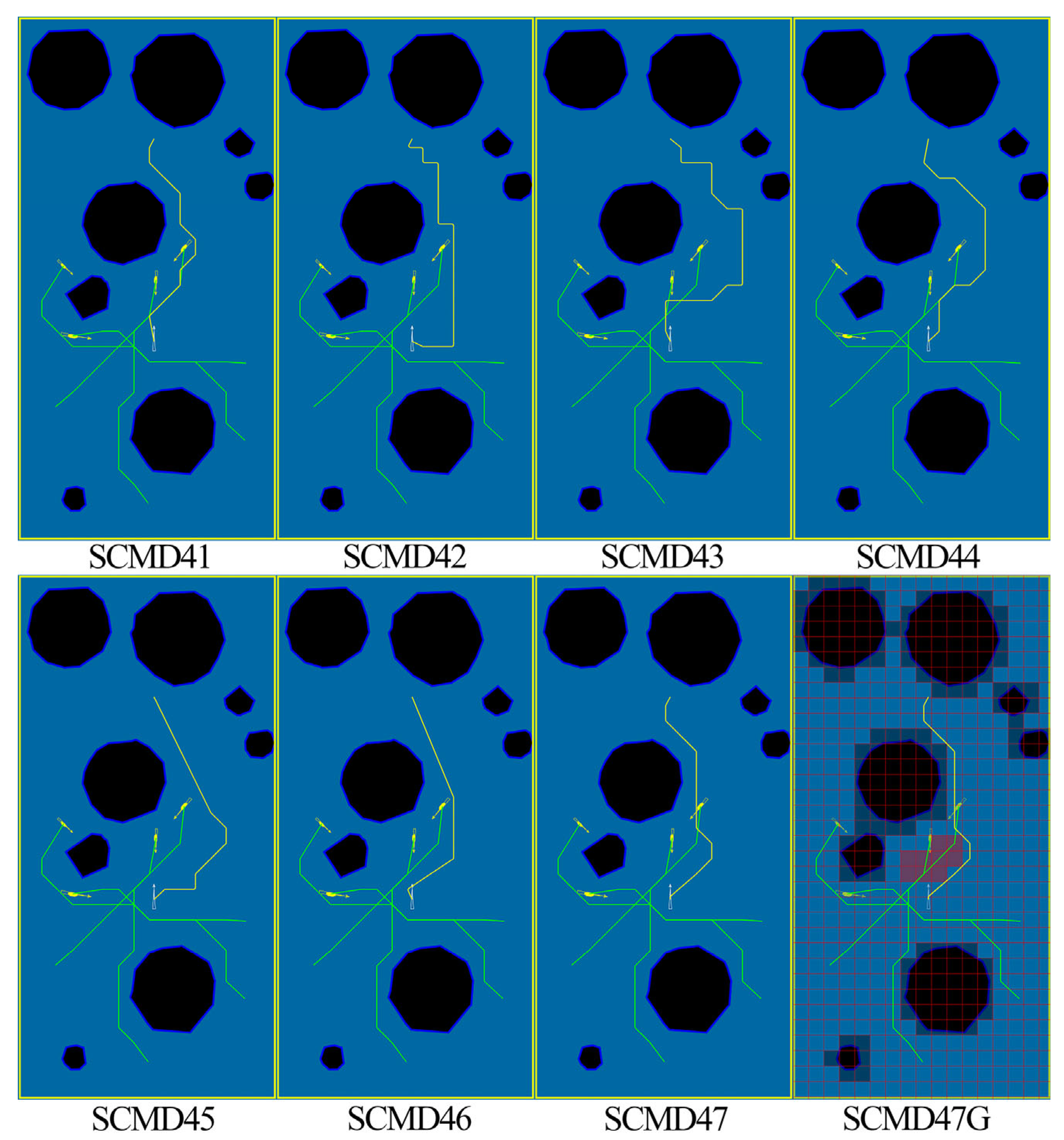
Path planning results in scenario SCENE4.
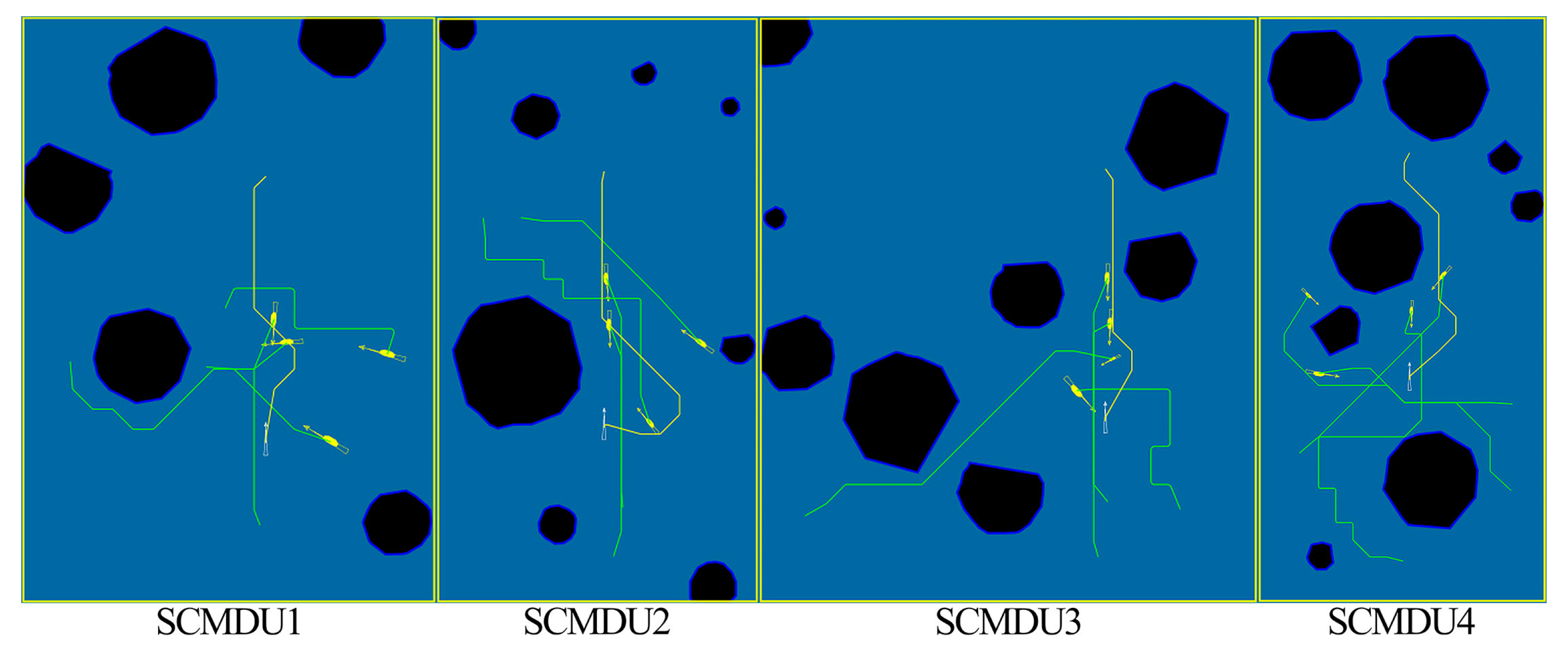
In the four scenarios, according to the experimental scheme, when the interfering ships randomly selected the path planning method, six repeated experiments were carried out. Taking the first experiment () as an example, the results were shown in Figure 11. The path planning method proposed is adopted for target ships, and the effect of grid division and equivalent static obstacle line is consistent with the scheme in the corresponding scenario ( represents the scheme using the path planning method proposed in this paper, such as , , etc.). Therefore, grid division and equivalent static obstacle line renderings are no longer repeated.
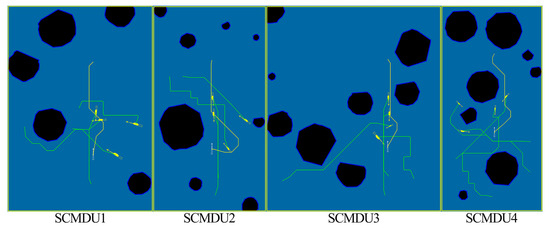
Figure 11.
Experimental results of .
3.3.2. Reliability Verification Results
The curves of the results for scenarios are shown in Figure 12.
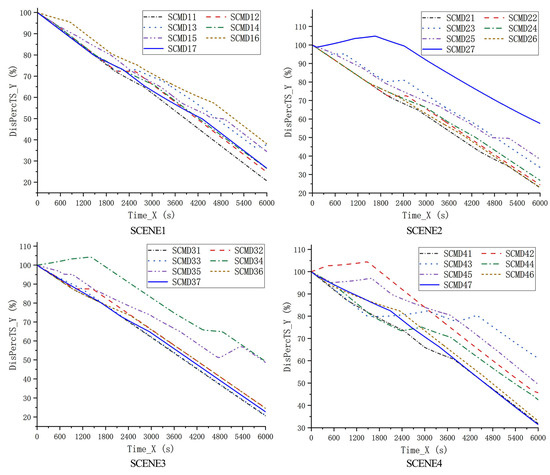
Figure 12.
DPTMSFTS curves for scenarios SCENE1–SCENE4.
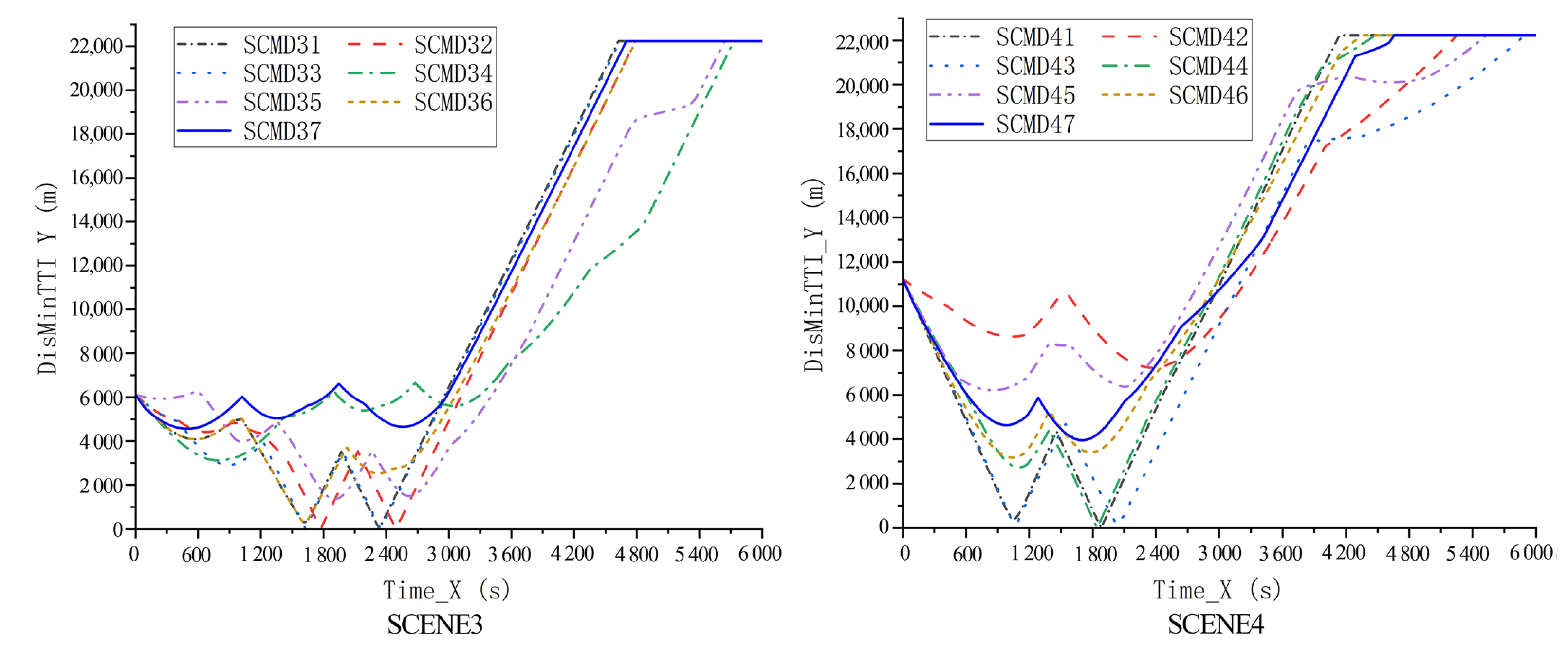
The curves of the results for scenarios are shown in Figure 13.
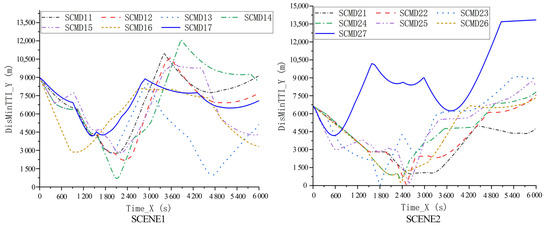
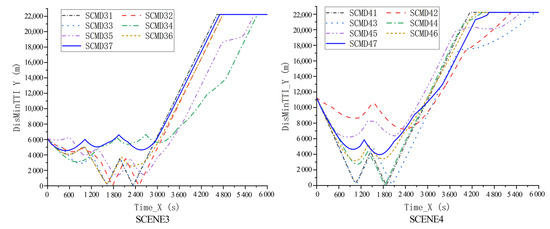
Figure 13.
DSMinTMSTTI curves for scenarios SCENE1–SCENE4.
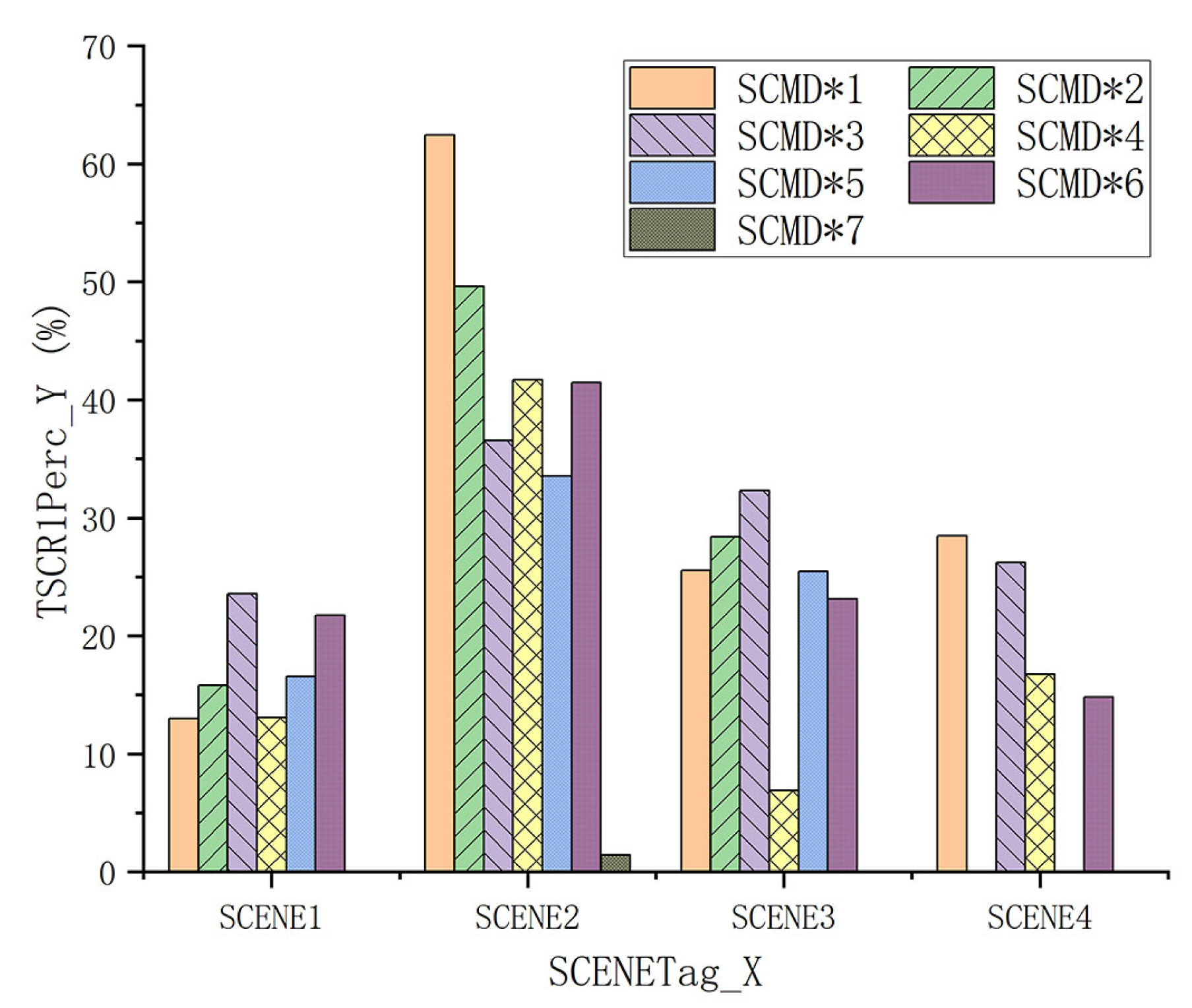
Figure 14 shows the data distribution of of the target ship for scenarios .
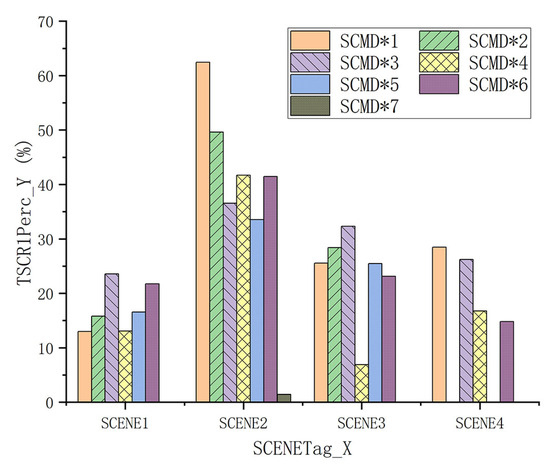
Figure 14.
CR1TMPAS distribution of the target ship for scenarios SCENE1–SCENE4.
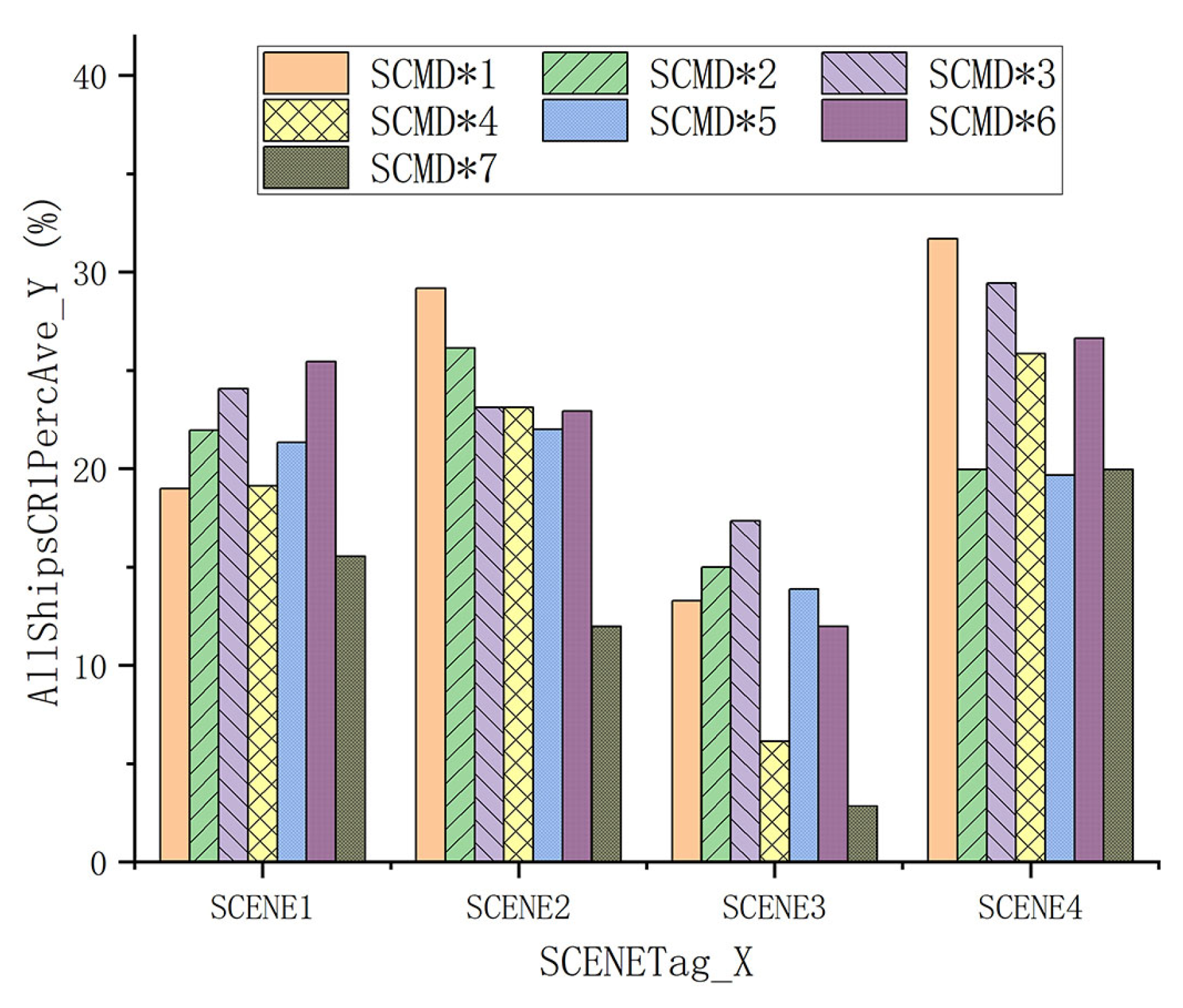
Figure 15 shows all ships’ mean value distribution of for scenarios .
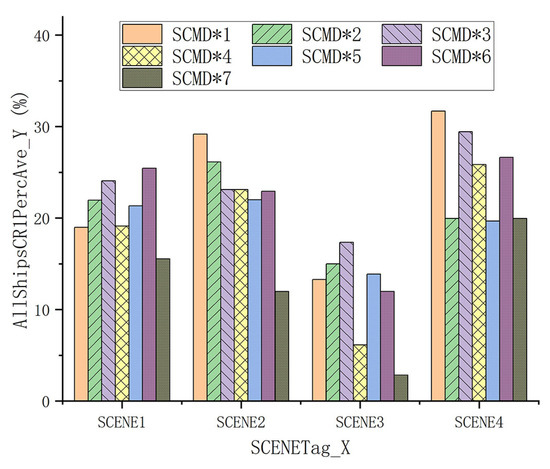
Figure 15.
CR1TMPAS mean value distribution of all ships for scenarios SCENE1–SCENE4.
3.3.3. Results of Six Rounds of Experiments under Uncertain Conditions
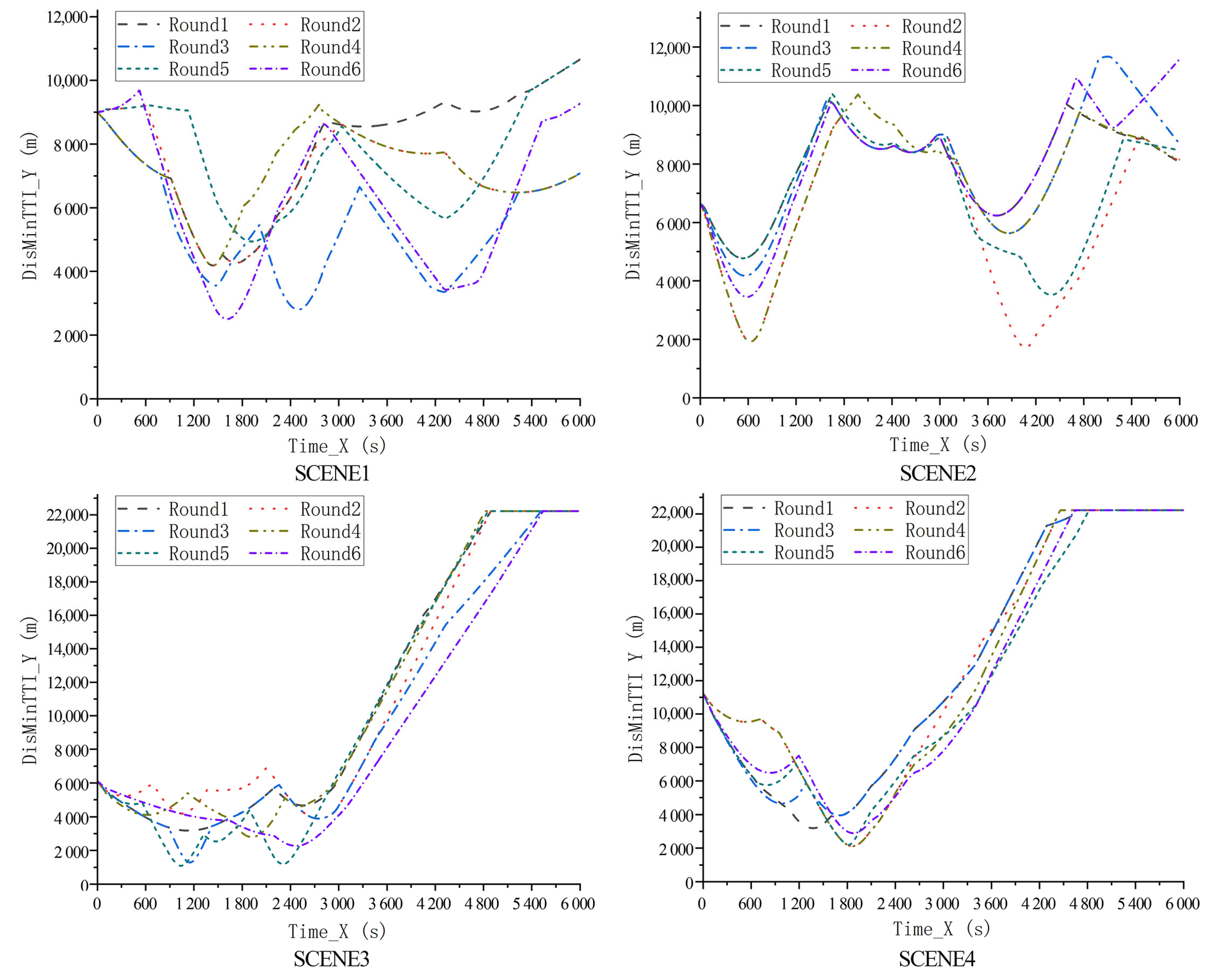
In the rounds of experiments in different scenarios, the target ship adopted the proposed method in this paper; that is, the experimental scheme corresponding to was selected. The curves were consistent with the corresponding curves in Figure 12, so they were not repeated. The curves of the repeated experiments’ results are shown in Figure 16.
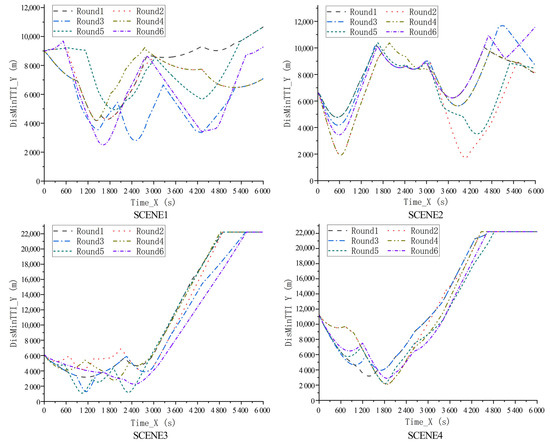
Figure 16.
DSMinTMSTTI curves of six rounds of experiments in different scenarios.
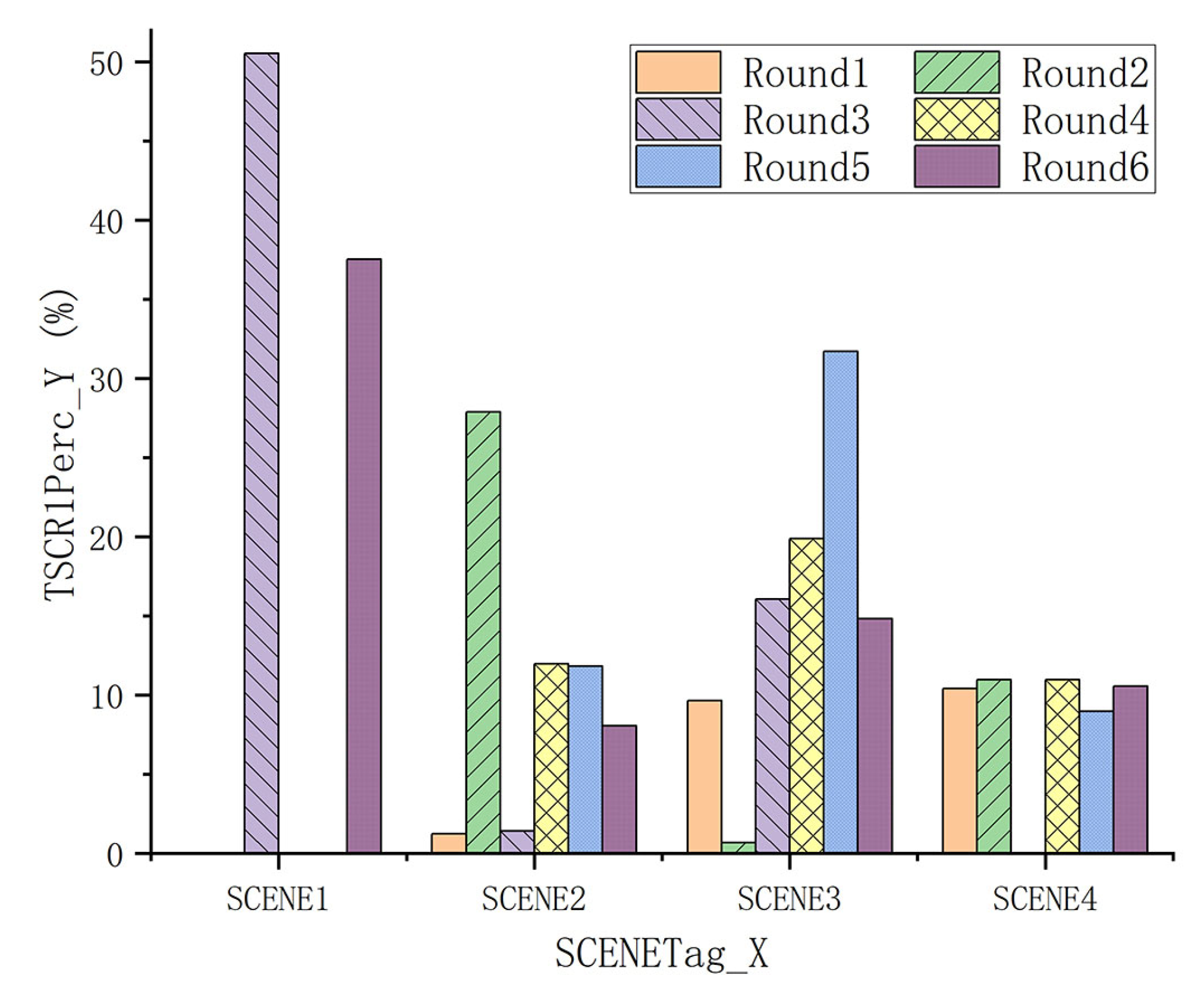
In different scenarios, the data distribution of of the target ship in six rounds of experiments with different scenarios are shown in Figure 17.
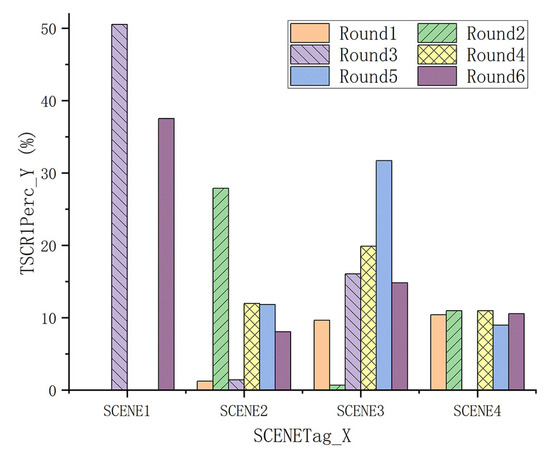
Figure 17.
CR1TMPAS distribution of the target ship in six rounds of experiments.
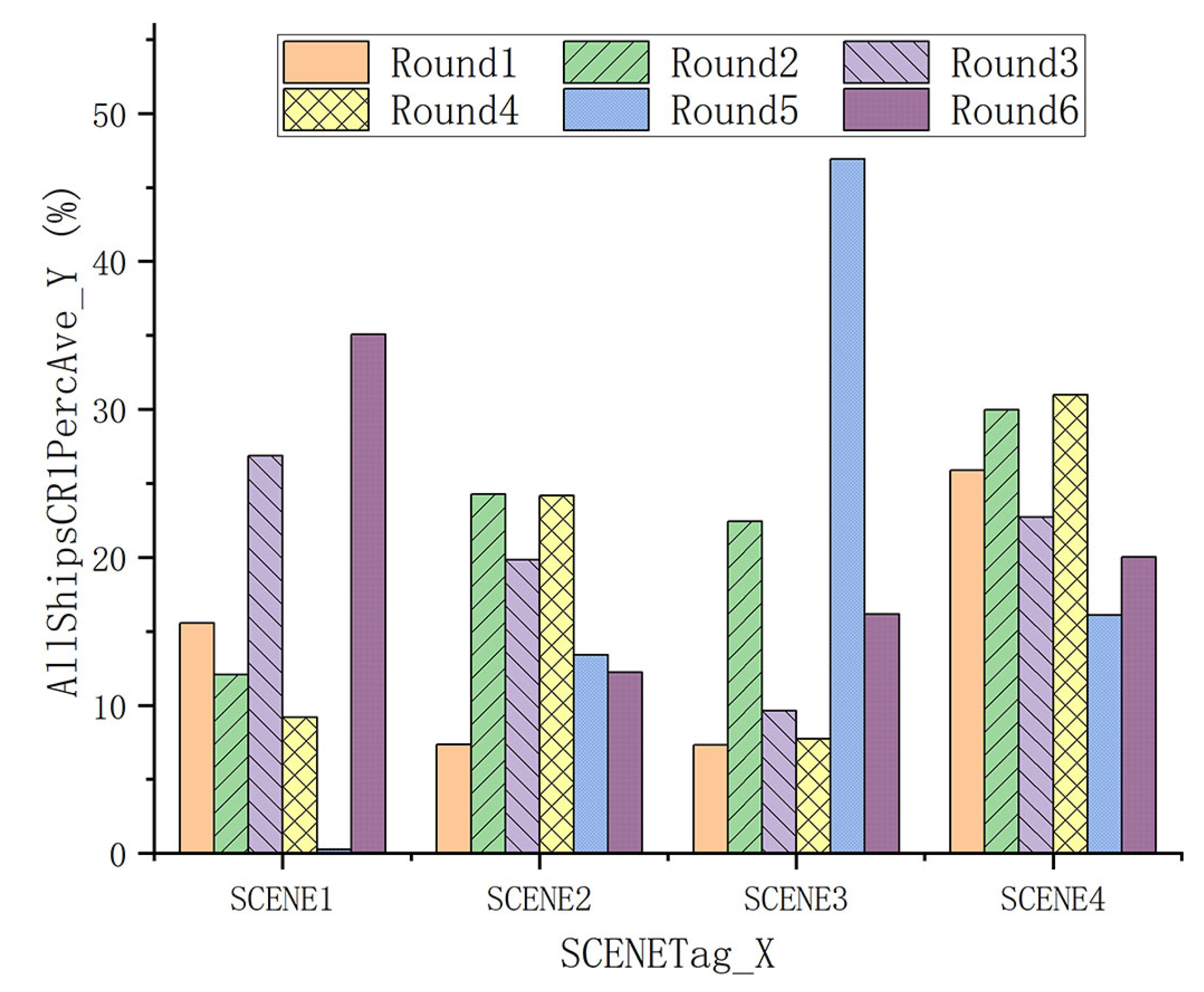
In different scenarios, the mean value distribution of data of all ships in rounds of experiments with different scenarios are shown in Figure 18.
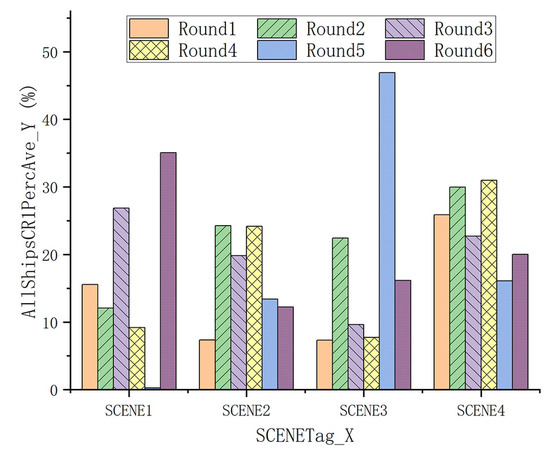
Figure 18.
CR1TMPAS mean value distribution of all ships in six rounds of experiments.
4. Discussion
4.1. Experimental Result Analysis
As depicted in Figure 7, Figure 8, Figure 9, Figure 10 and Figure 11, the experimental scene contains multiple random static obstacles, and multiple ships may form encounter situations with the target ship, which meets the setting requirements for the multi-ship encounter scenario with both dynamic and static obstacles.
4.1.1. Result Analysis of the Method Effectiveness Verification Experiment
According to the corresponding path planning effect of in Figure 7, Figure 8, Figure 9, Figure 10 and Figure 11, it can be seen that the path planned by the method proposed in this paper can meet the requirements of COLREGS when avoiding dynamic ships, and the equivalent static obstacle line can also effectively guide the path planning process, basically meeting the original design intention. As ships sail at a uniform speed in the experiment, the local target points of each ship are calculated according to the initial course and the same sailing time, and the local target points of each ship in the figure are in their respective initial course directions. Therefore, the relative relationship between the speed of each ship can be roughly judged from the linear distance () relationship between the starting point and the endpoint (that is, the local target point) of each ship’s path in the figure.
In Figure 7, the of the target ship is slightly longer than that of the two interfering ships in front, while the of the two interfering ships in the right rear and right front is significantly shorter. Therefore, it can be roughly judged that the two interfering ships on the right have relatively low speeds. The target ship sails according to the corresponding path of scheme . From the view of the path trend, the TS first turns to the right, avoids the incoming ships from the right rear and the incoming ships in front successively, and then turns to the left to avoid the interference ships from the far distance and slow speed in the right front. From the perspective of the encounter situation, the avoidance direction of the TS meets the requirements of COLREGS. At the same time, it can also ensure the efficiency of the target ship. The equivalent static obstacle line can play an active role in guiding the path-planning process. Other path-planning methods participating in the comparison could not meet the requirements of COLREGS. Although the planned path also had the performance of transferring to the right first in terms of path trend, it could not guarantee safe avoidance of the encountered interfering ships. For example, in scheme , the target ship turned to the left too early, which could easily form a dangerous encounter situation with two interfering ships and could not guarantee the safety of the target ship’s navigation. Moreover, there are many meaningless detours in some comparison paths, such as scheme , which cannot guarantee the sailing efficiency of the target ship.
In Figure 8, the of the interfering ship on the far right is slightly shorter than that of the TS, while the of other interfering ships is relatively close to that of the TS. Therefore, the far-right interfering ship’s speed is the lowest, and the speed of the other interfering ships is close to the speed of the target ship. The target ship sails according to the corresponding path of scheme . From the trend of the path, the target ship initially maneuvers with a significant rightward turn to evade the interfering ship on the right cross, and then turns to the left to successfully avoid other interfering ships. From the perspective of the encounter situation, due to the large angle crossing on the right side, the interfering ship has a close distance and close speed, and the target ship will turn to the right with a large angle for collision avoidance, and also successfully avoid other interfering ships. To ensure navigation safety, the navigation efficiency of the target ship is slightly lost. In general, the avoidance direction of the target ship conforms to the requirements of COLREGS, and the equivalent static obstacle line is also effective in guiding the local path planning process of the target ship. Other paths involved in the comparison could easily lead to a dangerous encounter or even collision between the target ship and one or more interfering ships. For example, in scheme , the target ship easily forms a dangerous encounter situation with the interfering ship at a close distance to the right side, or even collision, and the navigation safety of the target ship cannot be guaranteed. Although most of the comparison paths have a higher navigation efficiency, it is meaningless to sacrifice the navigation safety of the ship in exchange for navigation efficiency.
Adopting the same analysis method as described above, the experimental results in Figure 9 and Figure 10 can also be analyzed.
To sum up, compared with other path planning methods involved in the comparison, the local path planning approach suggested is better suited for scenarios involving encounters among multiple ships, encompassing both dynamic and stationary obstacles. The planned path can fully consider the requirements of COLREGS, and try to take into account the safety and efficiency of the navigation of the target ship. Therefore, the local path planning method proposed in this paper is effective.
4.1.2. Method Reliability Single-Round Verification Experiment Result Analysis
The reliability verification of local path planning methods for target ships is obtained by the comparative analysis of , and corresponding to different path planning methods.
The first is the index , which can present the efficiency of ship navigation to some extent. As can be seen in Figure 12, in scenarios , and , the adoption of the can maintain a higher level of ship navigation efficiency compared with that of other path planning methods. In scenario , the navigation efficiency of the target ship is slightly lower by using the proposed method. According to the analysis in previous sections, to ensure the navigation safety of the target ship, a large turning strategy is adopted so that the target ship’s navigation efficiency is slightly lost.
The second is the index , which can present the safety of ship navigation to a certain extent. As can be seen in Figure 13, in scenarios –, after the is adopted, the target ship can maintain a large distance from interfering ships during its navigation to ensure navigation safety.
Finally, the index can also present the safety of ship navigation to a certain extent. As can be seen from Figure 14, in scenarios –, after the is adopted, the index value of the target ship is almost , indicating that the target ship’s path effectively avoids or reduces the collision risk between it and interfering ships. As depicted in Figure 15, compared with other path planning methods, after the target ship adopts the , the average index of each ship is significantly improved. It shows that the target ship navigates the path according to the path planning method proposed in this paper, and the overall sailing condition of all ships in the whole scene is improved to some extent.
4.1.3. Analysis of Repeated Validation Experimental Results in Uncertain Environments
The environment with uncertain interfering ships’ paths may be closer to the real sailing scene of the target ship. As depicted in Figure 16, the local path of the target ship planned by the method proposed in this paper can ensure that the minimum value of the target ship and the interfering ships’ distance is always higher than a certain threshold, and the threshold values in scenarios , , and are all higher than . The navigation safety of the target ship is guaranteed. The threshold value in is low, indicating that there may be a certain risk of collision during the navigation of the target ship, but the threshold value is always higher than , indicating that no collision accident has occurred and the target ship is safe during the whole navigation process.
As depicted in Figure 17 and Figure 18, in most conditions, the local path planned by the proposed method can ensure that the target ship‘s collision risk is kept at a low level during the whole sailing process. It may be because in the proposed method, the requirements of COLREGS are fully considered, so it is more adaptable to uncertain navigation scenarios. However, the index in some experiments is slightly higher, such as the third experiment and sixth experiment in scenario , the second experiment in scenario , and the fifth experiment in scenario , which also presents from one viewpoint that the navigation safety of ships cannot be fully guaranteed only by relying on established local paths. If necessary, avoidance measures should be taken to reduce the risk of collision.
Furthermore, from any individual scenario alone, due to the randomness in the selection of path planning algorithms for interfering ships among the six rounds of experiments, for both the target ship and the entire navigation scenario there is a significant variation in collision risk. This indicates a notable impact of uncertainty in the behavior of interfering ships on navigation safety. By comparing Figure 14 and Figure 17, it can be observed that when the target ship accurately predicts the path of interfering ships, the utilization of the proposed method significantly enhances navigation safety. Therefore, with the development of intelligent networked technology, continuous improvement of regulations, and evolving mindset, in the near future, local path sharing among ships within a close range may become an effective approach to enhance maritime navigation safety in multi-ship encounters.
In general, the local path planning method for ships proposed in this paper can adapt to most uncertain sailing scenarios, improve the sailing environment of ships, and ensure navigation safety. However, it’s still necessary to maintain a regular lookout at all times during sailing and cope with unpredictable collision risks at any time.
4.2. Limitations and Prospects
This study mainly focuses on the multi-ship encounter scenario with both dynamic and static obstacles, which involves various factors influencing the actual sailing path. To facilitate the study, the ship turning path is simplified as an arc. Since during the simulation process, the ship’s dynamics characteristics are not fully considered, the heading and course are given the same value. Distinctions are made in the algorithm, where the calculation of the subarea that the interfering ship belongs to is based on the value of the target ship’s heading. Based on COLREGS, the suitable sailing direction interval of the target ship is calculated, and the target ship’s turning amplitude value is acquired, which will be adopted to adjust the heading value. Future work will fully integrate the ship’s dynamics characteristics to determine accurate adjustment strategies for the speed and course, and develop a more precise path planning method to meet the special needs of unmanned ships sailing in complex waters.
For enhanced analysis simplicity and research repeatability assurance, the method proposed herein is compared with commonly utilized path planning methods. In the future, the comparative analysis of the realization effect of some improved path planning methods can be continued, and real ship experiments can be organized to further verify the proposed method’s reliability.
Although in situations where the target ship can acquire the local path of interfering ships relatively accurately, this study can assist the target ship in planning local paths that comply with COLREGS requirements, there is still certain room for further research on handling the uncertainty in the behavior of interfering ships. In particular, in the actual sailing scenario, the behavior of interfering ships can be highly unpredictable. For instance, situations may arise where the target ship is unable to accurately predict or acquire the local path of interfering ships, or when interfering ships deviate from COLREGS, or fail to follow the established paths. Even when the target ship is following a predetermined path, there remains a risk of unpredictable collisions. In such situations, the target ship must promptly choose collision avoidance strategies and take appropriate actions to ensure navigation safety. Therefore, maintaining a constant regular lookout and being prepared to maneuver in the case of emergencies are essential for the target ship during navigation. Combining reliable local paths with timely and effective collision avoidance strategies can greatly enhance navigation safety, which is one of the key areas of focus for future research. In addition, in this paper, the encounter situation is judged according to the two ships’ distance, relative azimuth relationship, and collision risk. In the actual application scenario, due to the fluctuation of the relative azimuth and other relational data, the boundary value of the relative azimuth interval still needs to be adjusted appropriately. It should meet an important principle of COLREGS that if a danger is suspected, it should be assumed to exist to ensure the maximum safety of navigation.
In general, in the local path planning method for unmanned ships proposed in this paper, not only is the effective avoidance of dynamic and static obstacles considered, but also the requirements of COLREGS, to ensure the paths’ safety, efficiency, and continuous reliability to maximum extent.
5. Conclusions
In this paper, a local path planning method for unmanned ships in the multi-ship encounter scenario, where multiple dynamic and static obstacles coexist, is proposed. The method is based on situation inference and COLREGS constraint consideration. Firstly, existing path planning methods are utilized to obtain or preconfigure the local path for all ships. Next, the navigation situation of the target ship is dynamically inferenced, and under the constraint of COLREGS, the influence of interfering ships and static obstacles on the navigation of the target ship is equivalent to static obstacle lines, which are presented in the same scenario at the path planning moment. The established path of the target ship is continuously corrected to meet COLREGS requirements. The proposed method is compared with common path planning methods in multiple random scenarios. The verification results illustrate that the local path generated by the method proposed can not only effectively avoid dynamic and static obstacles, but also ensure that the requirements of COLREGS are met as much as possible. The research findings can offer interpretable references for the unmanned ships’ local path planning process. With the increasing information sharing among ships, the method may find broader applications in the near future.
Author Contributions
G.W.: Conceptualization, Methodology, Visualization, Writing—original draft. J.W.: Methodology, Project administration, Supervision. X.W.: Conceptualization, Funding acquisition, Methodology, Project administration, Supervision. Q.W.: Software, Validation, Visualization, Writing—review and editing. L.C.: Visualization, Writing—review and editing. J.H.: Visualization. B.W.: Investigation, Resources. K.F.: Data curation, Formal analysis, Writing—review and editing. All authors have read and agreed to the published version of the manuscript.
Funding
This research is supported by the New Generation Information Technology Innovation Project of the China Ministry of Education’s University-Industry Cooperation Fund (grant number: 2022IT191), the Qingdao Top Talent Program of Entrepreneurship and Innovation (grant number: 19-3-2-8-zhc), and the sub-project of the National Key Research and Development Program (grant number: 2018YFB1601500).
Data Availability Statement
The data presented in this study are available on request from the corresponding author. The data are not publicly available due to privacy.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Zhang, B.C.; Geng, X.F.; Li, Y.B.; Wen, J.; Yu, Q.C.; Feng, H. Research and development of ship intelligent navigation technology. Sci. Technol. Guide 2022, 40, 51–56. [Google Scholar]
- Almeida, C.; Franco, T.; Ferreira, H.; Martins, A.; Santos, R.; Almeida, J.M.; Carvalho, J.; Silva, E. Radar Based Collision Detection Developments on USV ROAZ II. In Proceedings of the OCEANS 2009-EUROPE, Bremen, Germany, 11–14 May 2009. [Google Scholar] [CrossRef]
- Kim, H.; Kim, D.; Shin, J.U.; Kim, H.; Myung, H. Angular Rate-Constrained Path Planning Algorithm for Unmanned Surface Vehicles. Ocean Eng. 2014, 84, 37–44. [Google Scholar] [CrossRef]
- Liu, Y.; Bucknall, R. The Angle Guidance Path Planning Algorithms for Unmanned Surface Vehicle Formations by Using the Fast Marching Method. Appl. Ocean Res. 2016, 59, 327–344. [Google Scholar] [CrossRef]
- Pandey, A.; Parhi, D.R. Optimum Path Planning of Mobile Robot in Unknown Static and Dynamic Environments Using Fuzzy-Wind Driven Optimization Algorithm. Def. Technol. 2017, 13, 47–58. [Google Scholar] [CrossRef]
- Song, R.; Liu, Y.; Bucknall, R. A Multi-Layered Fast Marching Method for Unmanned Surface Vehicle Path Planning in a Time-Variant Maritime Environment. Ocean Eng. 2017, 129, 301–317. [Google Scholar] [CrossRef]
- Du, Z.; Huang, L.; Wen, Y.; Xiao, C.; Zhou, C. Route Planning for Vessels Based on the Dynamic Complexity Map. In Information Fusion and Intelligent Geographic Information Systems (IF&IGIS’17); Popovich, V., Schrenk, M., Thill, J.C., Claramunt, C., Wang, T., Eds.; Lecture Notes in Geoinformation and Cartography; Springer: Cham, Switzerland, 2018; pp. 97–113. [Google Scholar] [CrossRef]
- Krata, P.; Szlapczynska, J. Ship Weather Routing Optimization with Dynamic Constraints Based on Reliable Synchronous Roll Prediction. Ocean Eng. 2018, 150, 124–137. [Google Scholar] [CrossRef]
- Kozynchenko, A.I.; Kozynchenko, S.A. Applying the Dynamic Predictive Guidance to Ship Collision Avoidance: Crossing Case Study Simulation. Ocean Eng. 2018, 164, 640–649. [Google Scholar] [CrossRef]
- Zaccone, R.; Ottaviani, E.; Figari, M.; Altosole, M. Ship Voyage Optimization for Safe and Energy-Efficient Navigation: A Dynamic Programming Approach. Ocean Eng. 2018, 153, 215–224. [Google Scholar] [CrossRef]
- Song, A.L.; Su, B.Y.; Dong, C.Z.; Shen, D.W.; Xiang, E.Z.; Mao, F.P. A Two-Level Dynamic Obstacle Avoidance Algorithm for Unmanned Surface Vehicles. Ocean Eng. 2018, 170, 351–360. [Google Scholar] [CrossRef]
- Ma, Y.; Hu, M.; Yan, X. Multi-Objective Path Planning for Unmanned Surface Vehicle with Currents Effects. ISA Trans. 2018, 75, 137–156. [Google Scholar] [CrossRef]
- Song, R.; Liu, Y.; Bucknall, R. Smoothed A* Algorithm for Practical Unmanned Surface Vehicle Path Planning. Appl. Ocean Res. 2019, 83, 9–20. [Google Scholar] [CrossRef]
- Zhou, C.; Gu, S.; Wen, Y.; Du, Z.; Xiao, C.; Huang, L.; Zhu, M. The Review Unmanned Surface Vehicle Path Planning: Based on Multi-Modality Constraint. Ocean Eng. 2020, 200, 107043. [Google Scholar] [CrossRef]
- Yan, X.P.; Wang, S.W.; Ma, F.; Liu, Y.C.; Wang, J. A Novel Path Planning Approach for Smart Cargo Ships Based on Anisotropic Fast Marching. Expert Syst. Appl. 2020, 159, 113558. [Google Scholar] [CrossRef]
- Vagale, A.; Oucheikh, R.; Bye, R.T.; Osen, O.L.; Fossen, T.I. Path Planning and Collision Avoidance for Autonomous Surface Vehicles I: A Review. J. Mar. Sci. Technol. 2021, 26, 1292–1306. [Google Scholar] [CrossRef]
- Wang, X.; Feng, K.; Wang, G.; Wang, Q. Local Path Optimization Method for Unmanned Ship Based on Particle Swarm Acceleration Calculation and Dynamic Optimal Control. Appl. Ocean Res. 2021, 110, 102588. [Google Scholar] [CrossRef]
- Sang, H.; You, Y.; Sun, X.; Zhou, Y.; Liu, F. The Hybrid Path Planning Algorithm Based on Improved A* and Artificial Potential Field for Unmanned Surface Vehicle Formations. Ocean Eng. 2021, 223, 108709. [Google Scholar] [CrossRef]
- Li, L.; Wu, D.; Huang, Y.; Yuan, Z.M. A Path Planning Strategy Unified with a COLREGS Collision Avoidance Function Based on Deep Reinforcement Learning and Artificial Potential Field. Appl. Ocean Res. 2021, 113, 102759. [Google Scholar] [CrossRef]
- Krell, E.; King, S.A.; Garcia Carrillo, L.R. Autonomous Surface Vehicle Energy-Efficient and Reward-Based Path Planning Using Particle Swarm Optimization and Visibility Graphs. Appl. Ocean Res. 2022, 122, 103125. [Google Scholar] [CrossRef]
- Ma, Y.; Zhao, Y.; Li, Z.; Yan, X.; Bi, H.; Królczyk, G. A New Coverage Path Planning Algorithm for Unmanned Surface Mapping Vehicle Based on A-Star Based Searching. Appl. Ocean Res. 2022, 123, 103163. [Google Scholar] [CrossRef]
- Wang, A.; Li, L.; Wang, H.; Han, B.; Peng, Z. Distributed Swarm Trajectory Planning for Autonomous Surface Vehicles in Complex Sea Environments. J. Mar. Sci. Eng. 2024, 12, 298. [Google Scholar] [CrossRef]
- Yang, C.; Pan, J.; Wei, K.; Lu, M.; Jia, S. A Novel Unmanned Surface Vehicle Path-Planning Algorithm Based on A* and Artificial Potential Field in Ocean Currents. J. Mar. Sci. Eng. 2024, 12, 285. [Google Scholar] [CrossRef]
- Naeem, W.; Irwin, G.W.; Yang, A. COLREGs-Based Collision Avoidance Strategies for Unmanned Surface Vehicles. Mechatronics 2012, 22, 669–678. [Google Scholar] [CrossRef]
- Tam, C.; Bucknall, R. Cooperative Path Planning Algorithm for Marine Surface Vessels. Ocean Eng. 2013, 57, 25–33. [Google Scholar] [CrossRef]
- Lazarowska, A. Ship’s Trajectory Planning for Collision Avoidance at Sea Based on Ant Colony Optimisation. J. Navig. 2015, 68, 291–307. [Google Scholar] [CrossRef]
- Candeloro, M.; Lekkas, A.M.; Sørensen, A.J. A Voronoi-Diagram-Based Dynamic Path-Planning System for Underactuated Marine Vessels. Control Eng. Pract. 2017, 61, 41–54. [Google Scholar] [CrossRef]
- Shi, B.; Su, Y.; Wang, C.; Wan, L.; Luo, Y. Study on Intelligent Collision Avoidance and Recovery Path Planning System for the Waterjet-Propelled Unmanned Surface Vehicle. Ocean Eng. 2019, 182, 489–498. [Google Scholar] [CrossRef]
- Lyu, H.; Yin, Y. COLREGS-Constrained Real-Time Path Planning for Autonomous Ships Using Modified Artificial Potential Fields. J. Navig. 2019, 72, 588–608. [Google Scholar] [CrossRef]
- Zaccone, R.; Martelli, M.; Figari, M. A Colreg-Compliant Ship Collision Avoidance Algorithm. In Proceedings of the 2019 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019; pp. 2530–2535. [Google Scholar]
- Zaccone, R. COLREG-Compliant Optimal Path Planning for Real-Time Guidance and Control of Autonomous Ships. J. Mar. Sci. Eng. 2021, 9, 405. [Google Scholar] [CrossRef]
- Long, Y.; Liu, S.; Qiu, D.; Li, C.; Guo, X.; Shi, B.; AbouOmar, M.S. Local Path Planning with Multiple Constraints for USV Based on Improved Bacterial Foraging Optimization Algorithm. J. Mar. Sci. Eng. 2023, 11, 489. [Google Scholar] [CrossRef]
- Öztürk, Ü.; Akdağ, M.; Ayabakan, T. A Review of Path Planning Algorithms in Maritime Autonomous Surface Ships: Navigation Safety Perspective. Ocean Eng. 2022, 251, 111010. [Google Scholar] [CrossRef]
- Fujii, Y.; Tanaka, K. Traffic Capacity. J. Navig. 1971, 24, 543–552. [Google Scholar] [CrossRef]
- Coldwell, T.G. Marine Traffic Behaviour in Restricted Waters. J. Navig. 1983, 36, 430–444. [Google Scholar] [CrossRef]
- Wang, G.; Wang, J.H.; Wang, X.Y.; Wang, Q.Z.; Han, J.Y.; Chen, L.F.; Feng, K. A Method for Coastal Global Route Planning of Unmanned Ships Based on Human-like Thinking. J. Mar. Sci. Eng. 2024, 12, 476. [Google Scholar] [CrossRef]
- Zheng, Z.; Wu, Z. A new model of ship collision risk. J. Dalian Mar. Univ. 2002, 28, 1–5. [Google Scholar]
- Wang, G.; Wang, X.; Wang, Q.; Chen, L.; Han, J.; Wang, B.; Shi, H. Complex Encounter Situation Modeling and Prediction Method for Unmanned Ships Based on Bounded Rational Game. Ocean Eng. 2023, 273, 114000. [Google Scholar] [CrossRef]
- Wang, X.; Wang, G.; Wang, Q.; Han, J.; Chen, L.; Wang, B. A Construction Method of a Sequential Decision Chain for Unmanned-Ship Autonomous Collision Avoidance Based on Human-like Thinking. J. Mar. Sci. Eng. 2023, 11, 2218. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).