
A Computation Model for Coast Wave Motions with Multiple Breakings


Abstract
:1. Introduction
2. Observation of Two Wave Breaking Phenomena in the Experiment
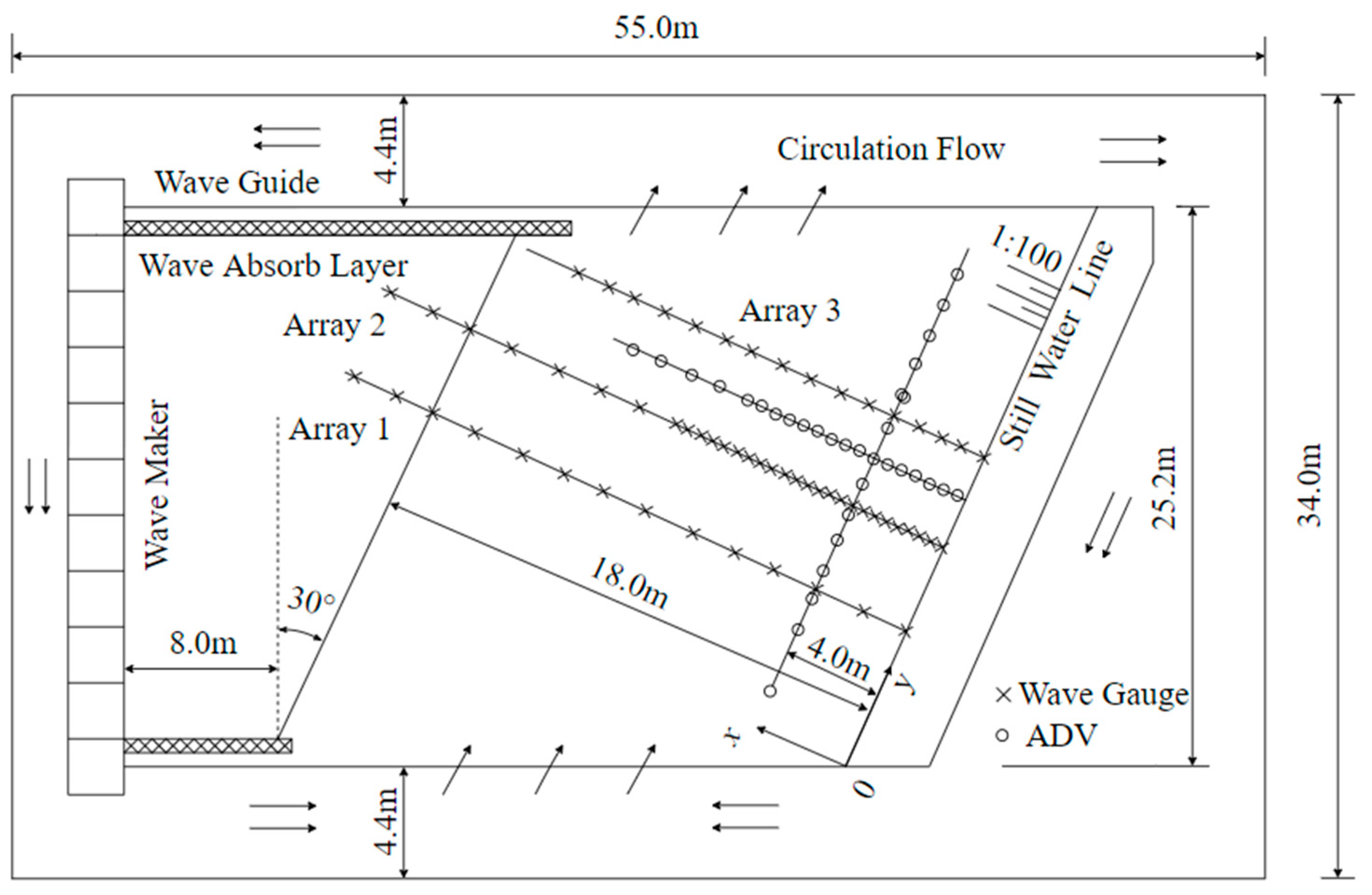
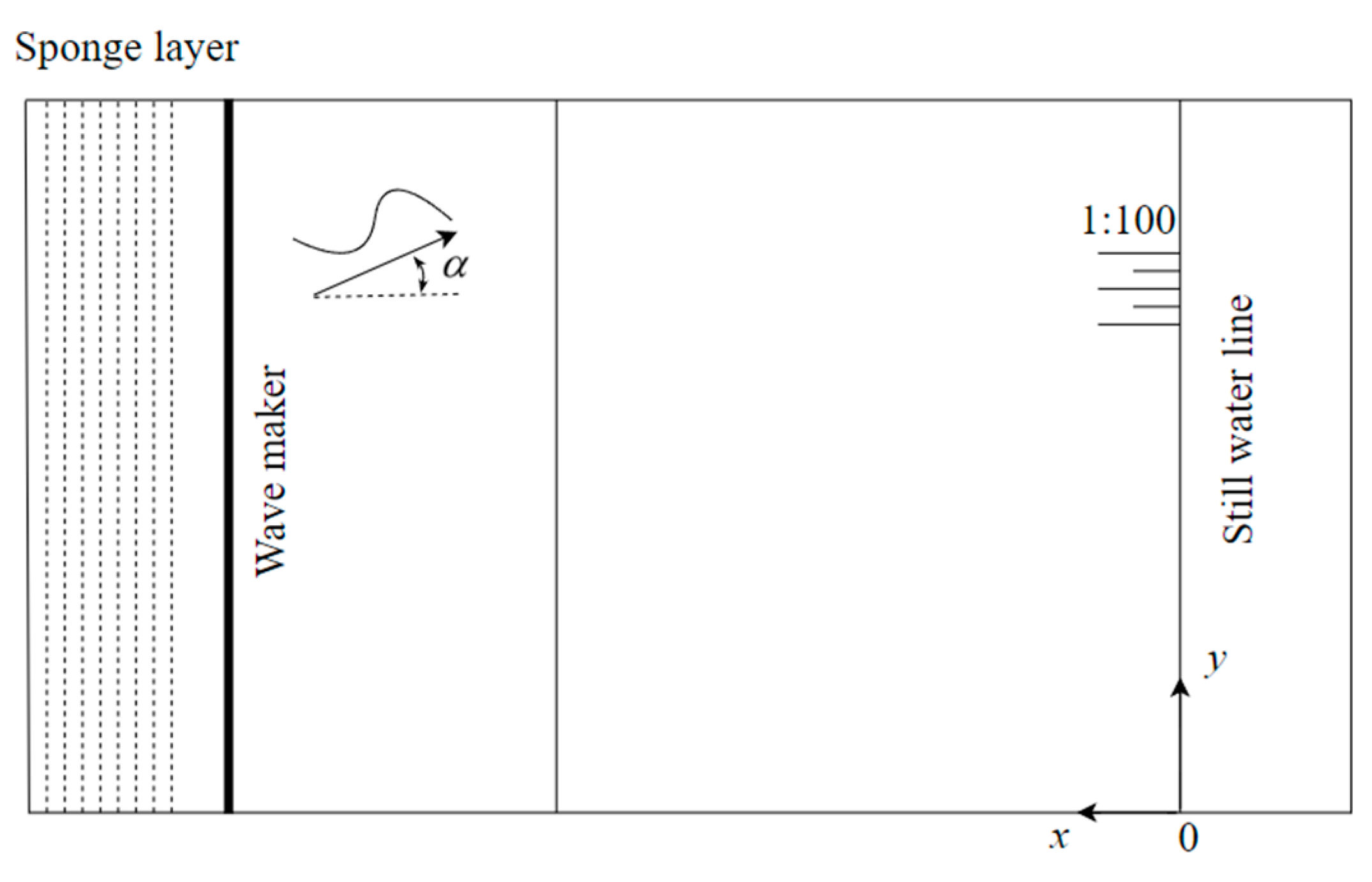
2.1. Experiment Introduction
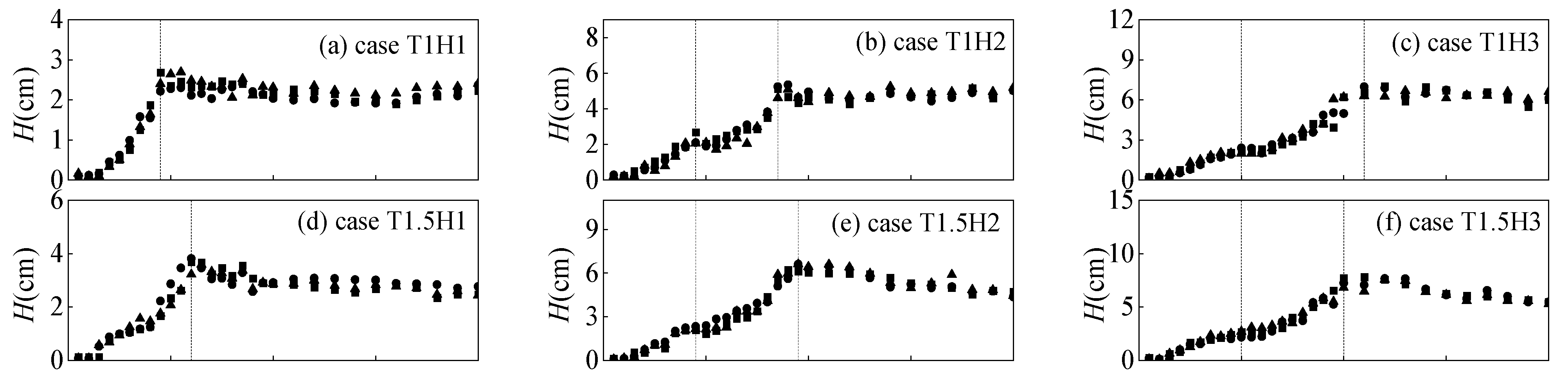
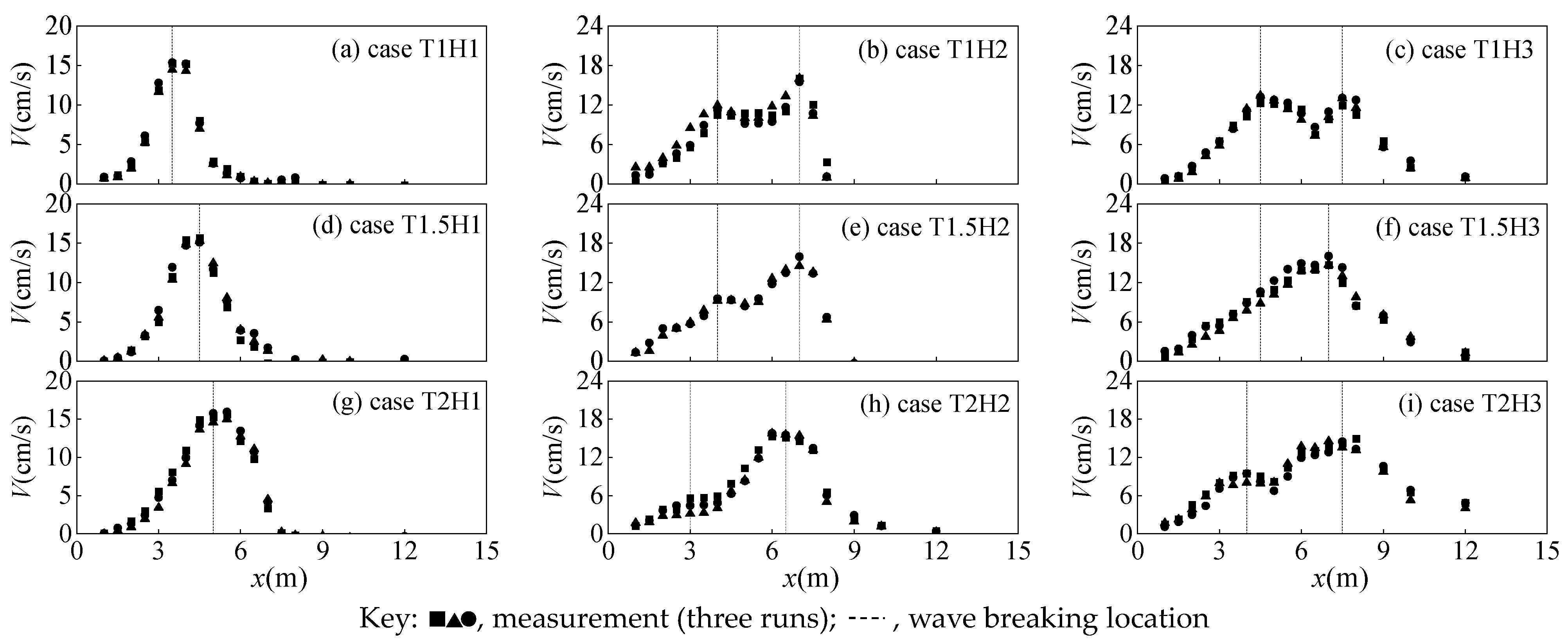
2.2. Experimental Results
3. Computation Model
3.1. Governing Equation
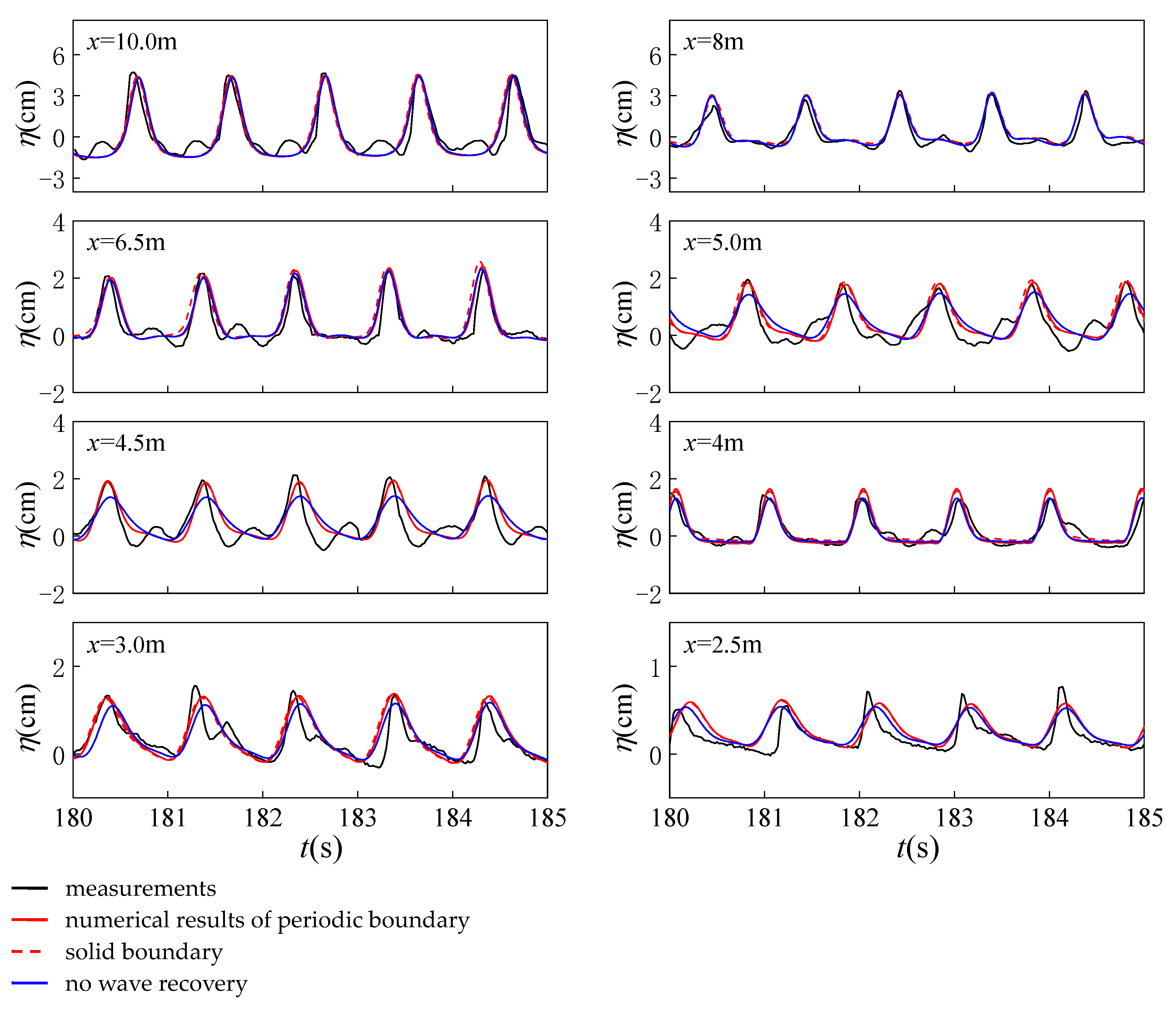
3.2. Numerical Method and Boundary Conditions
4. Model Validation and Comparison
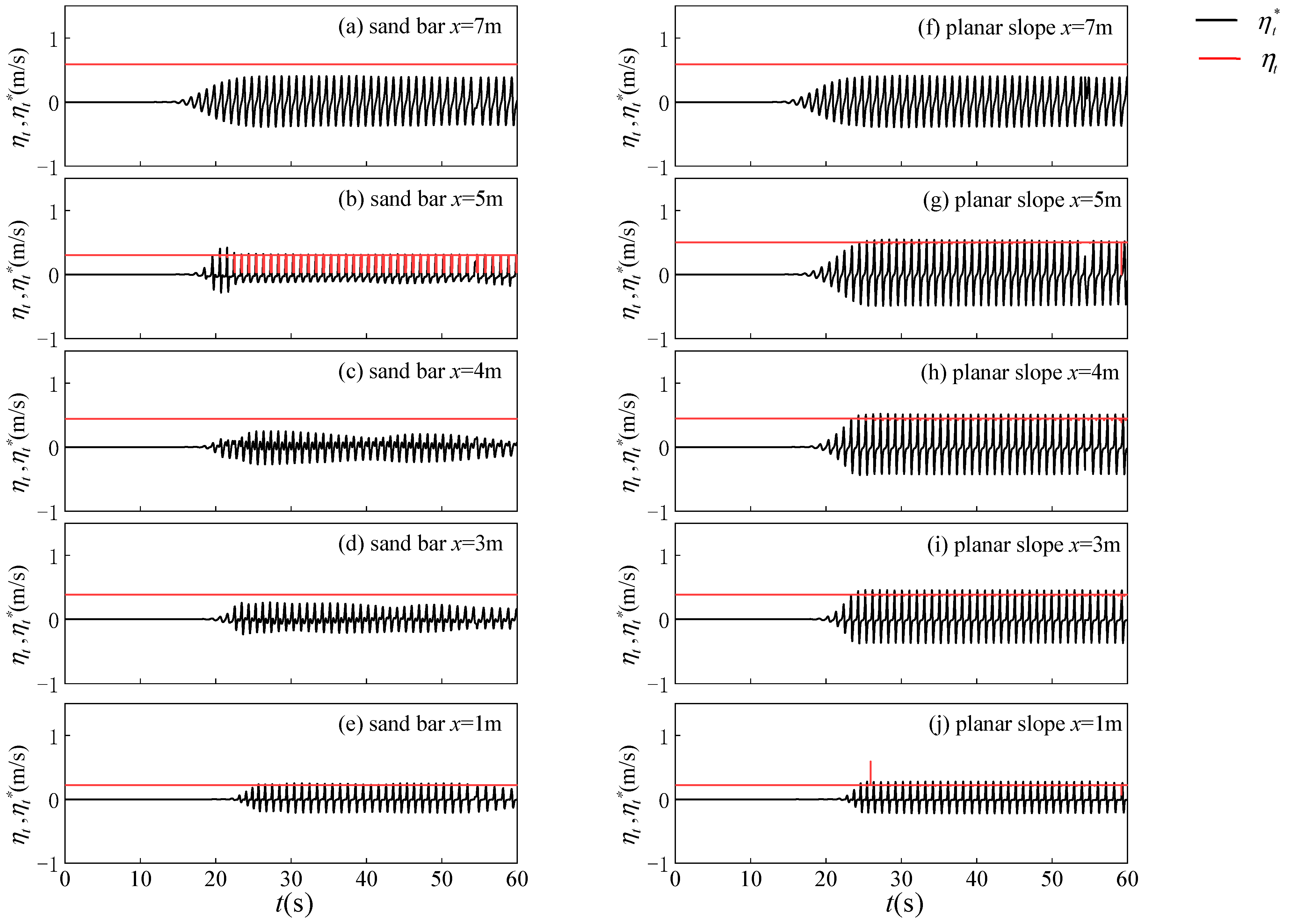
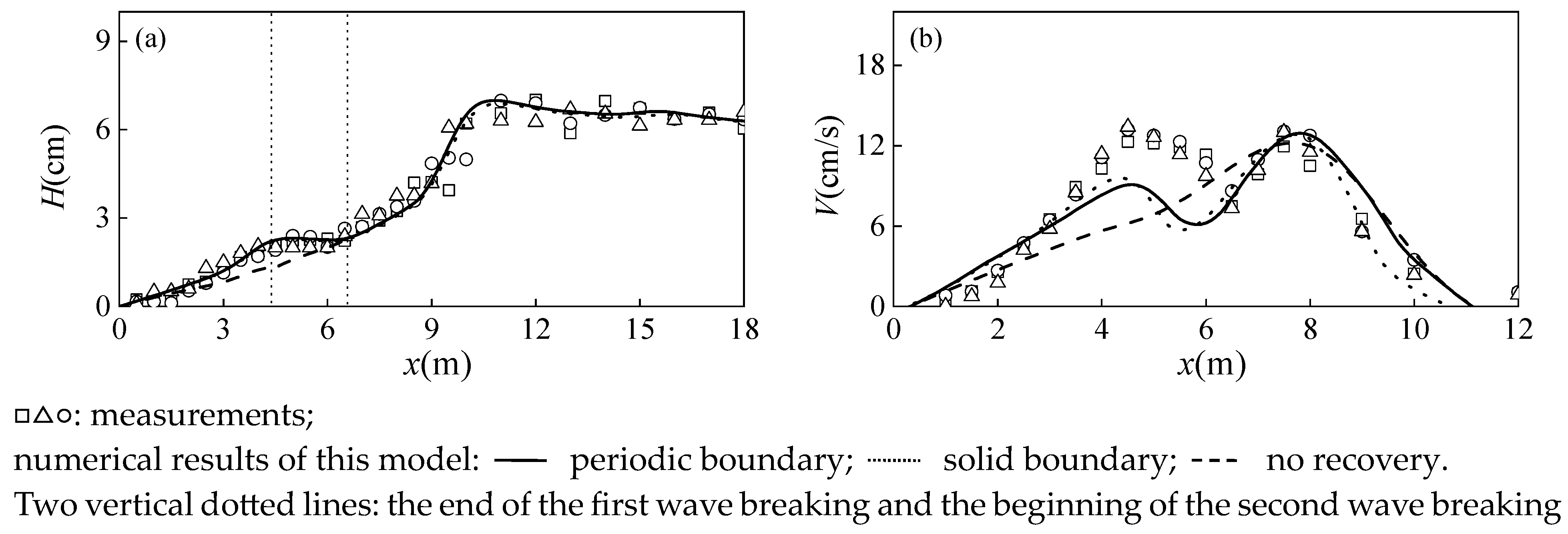
4.1. Verification for the Multiple Wave breaking Judgment condition
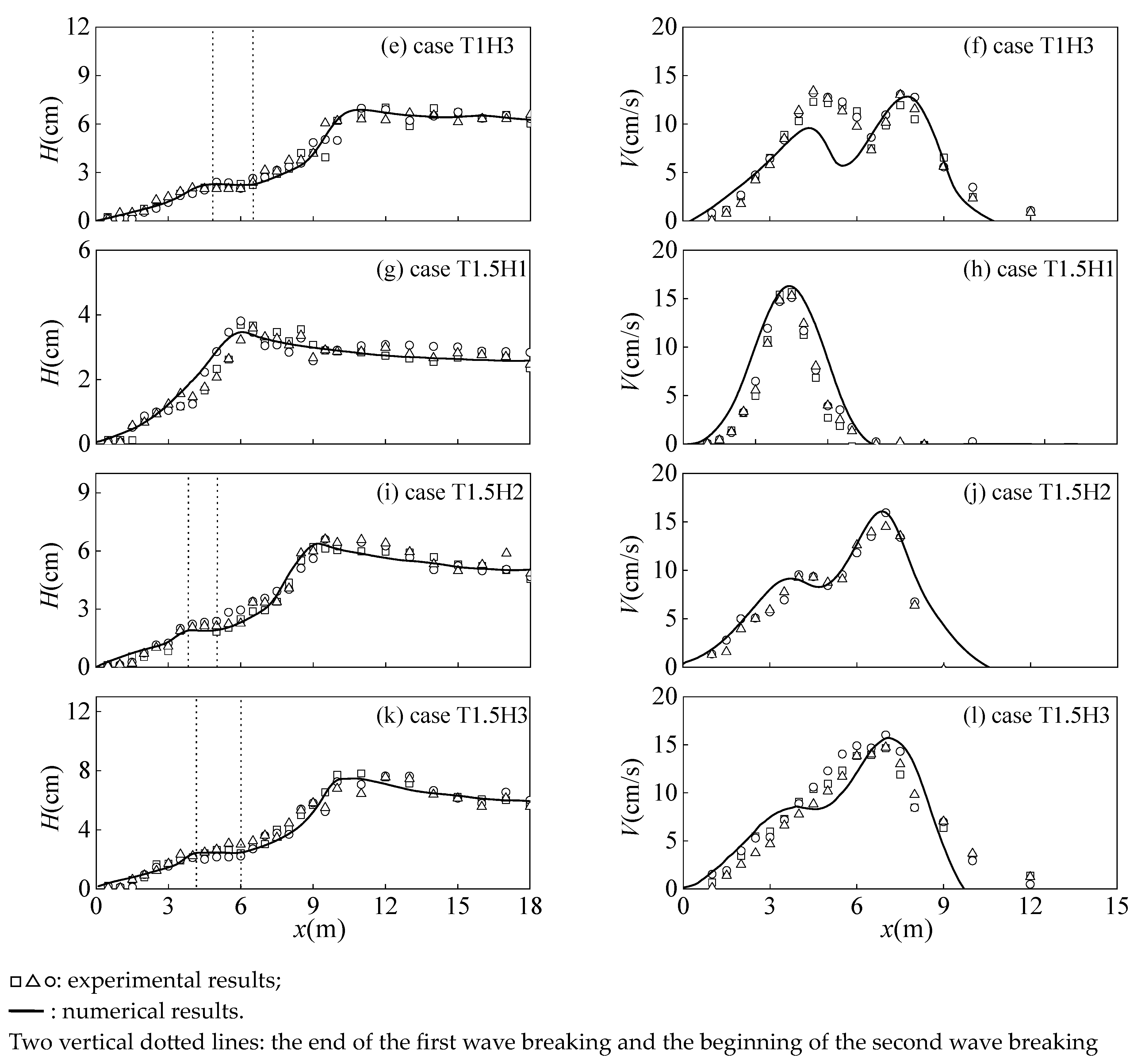
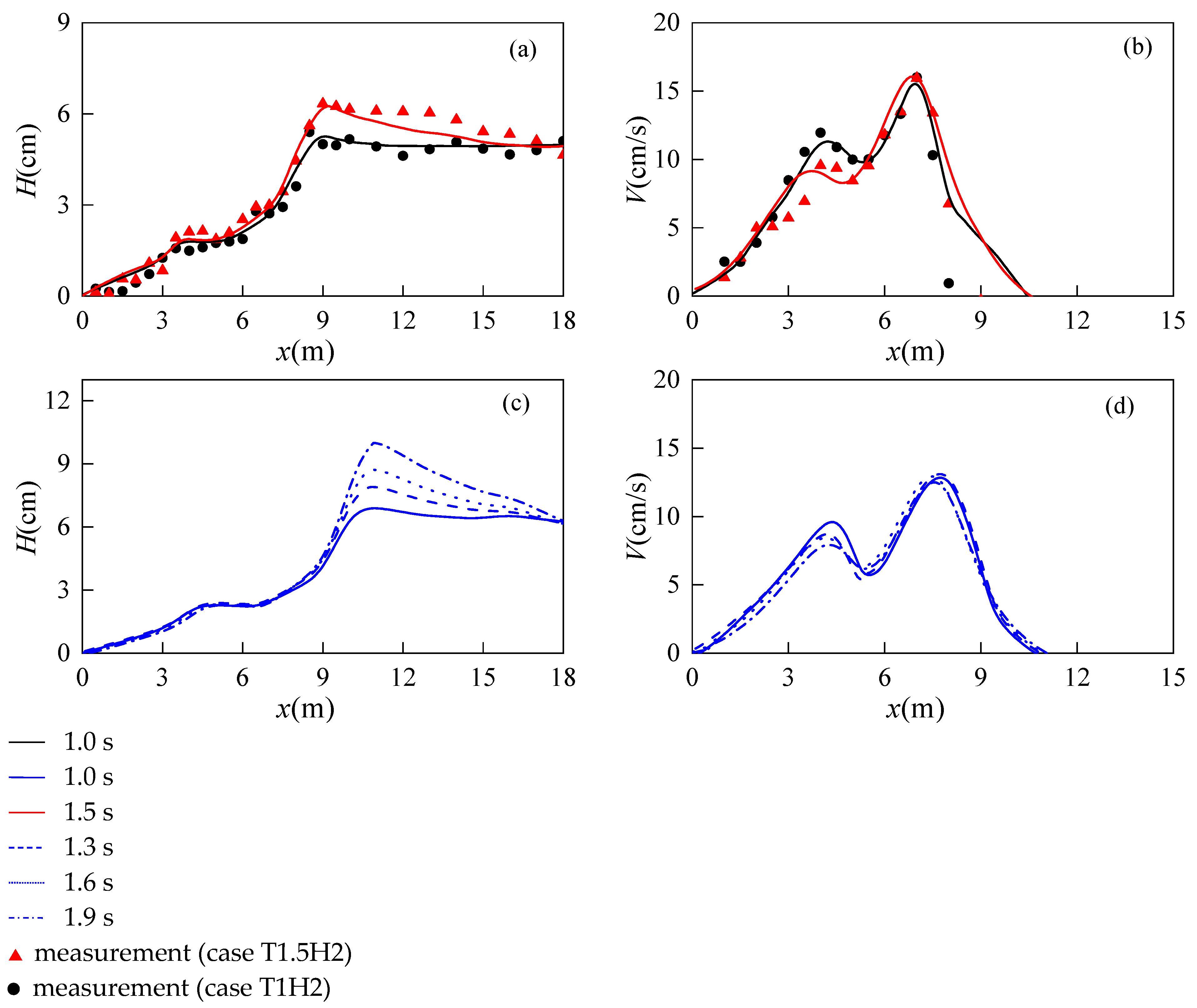
4.2. Validation for Different Incident Wave Heights
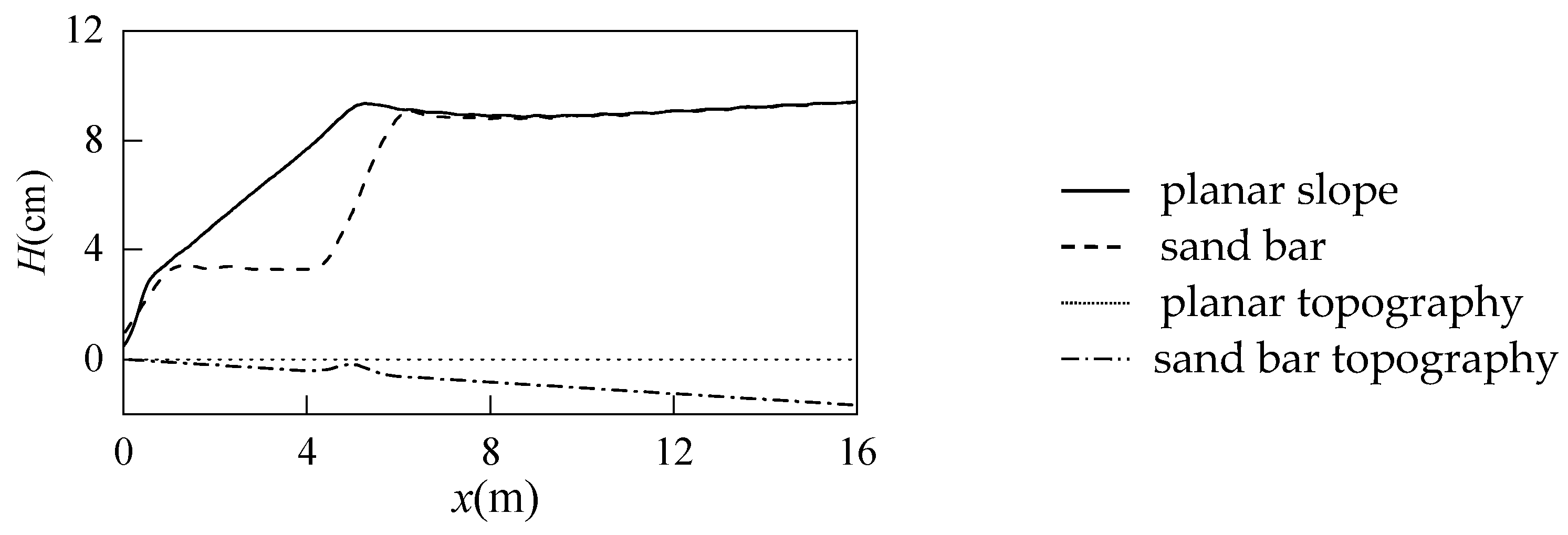
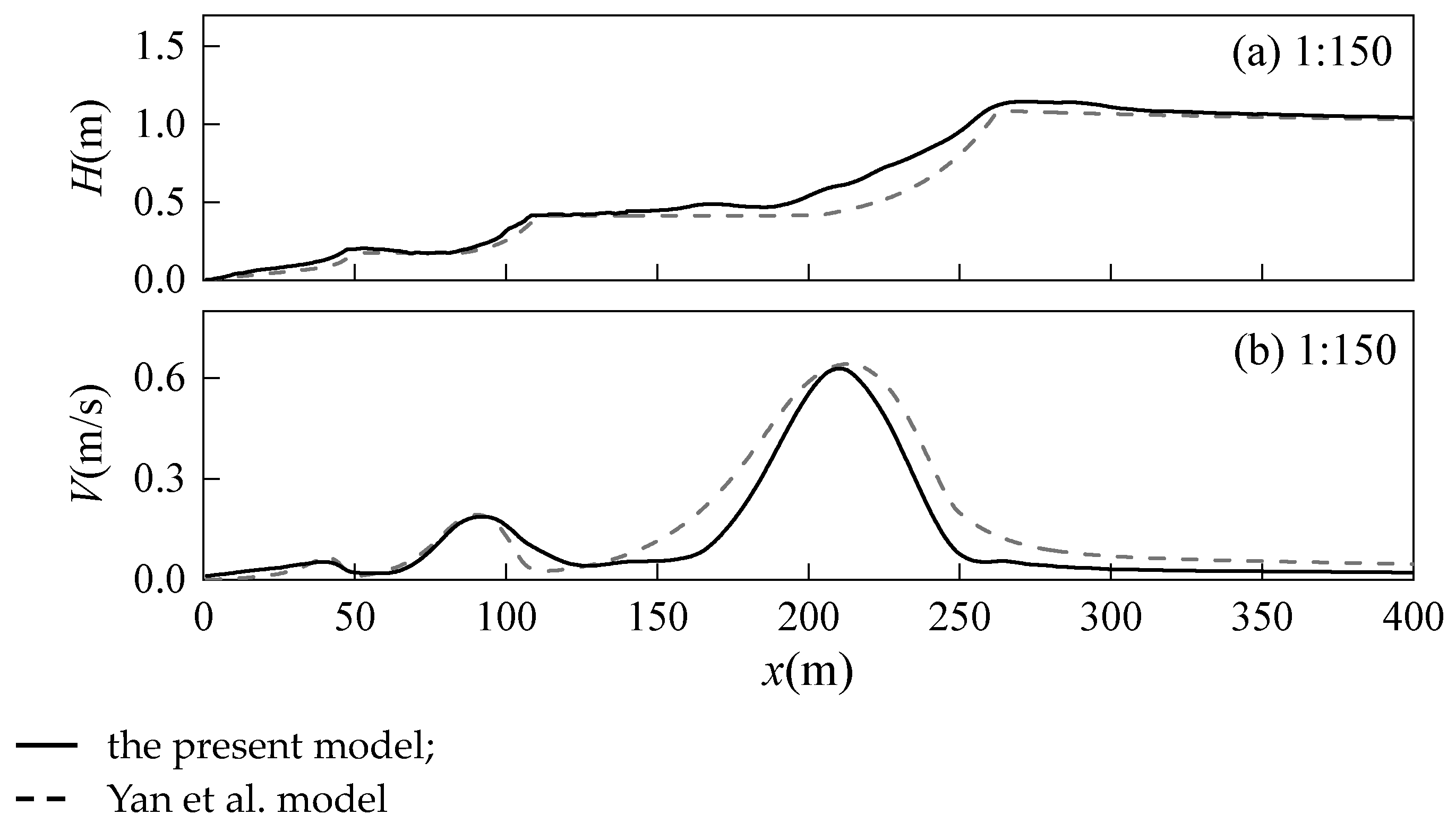
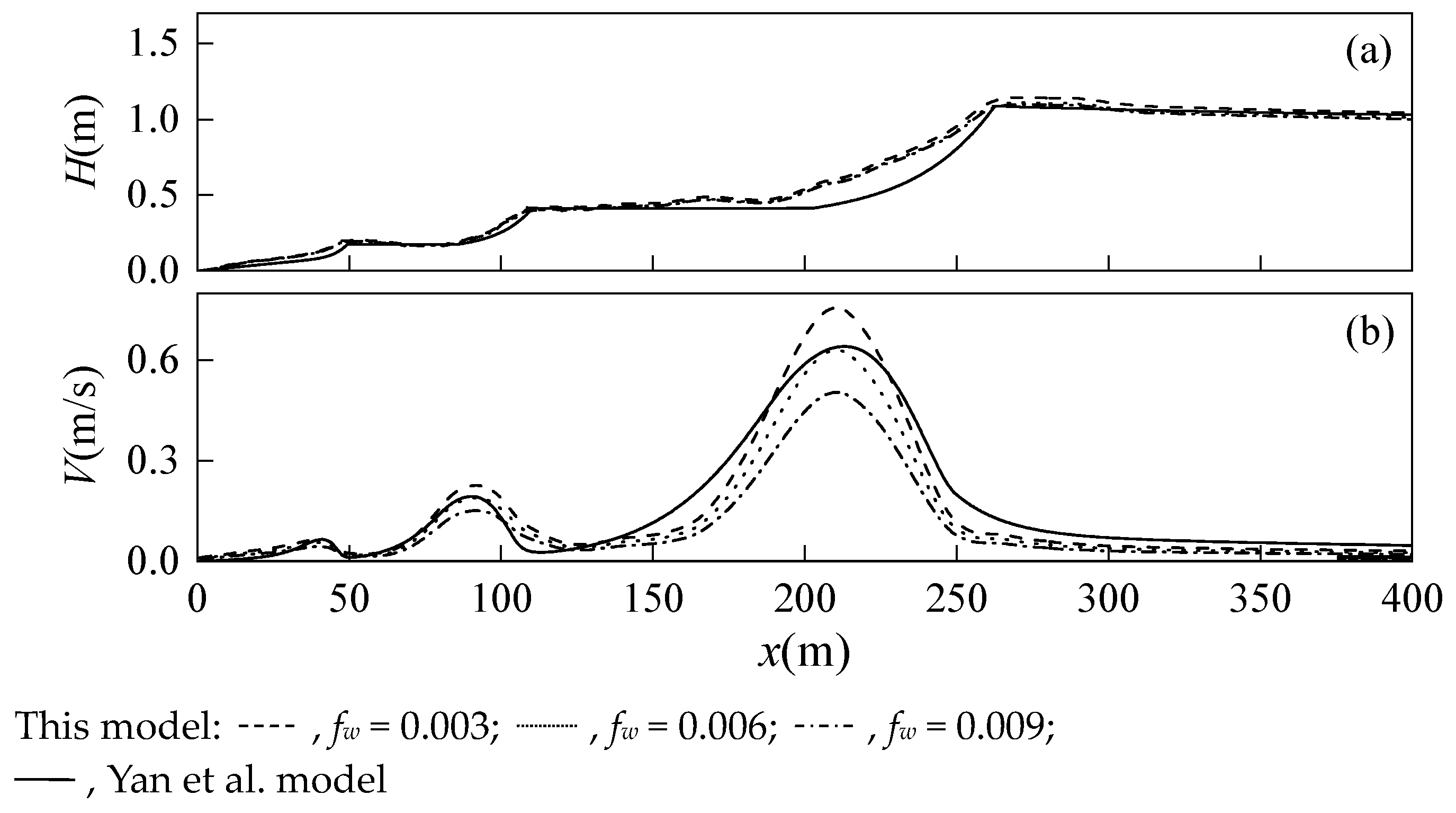
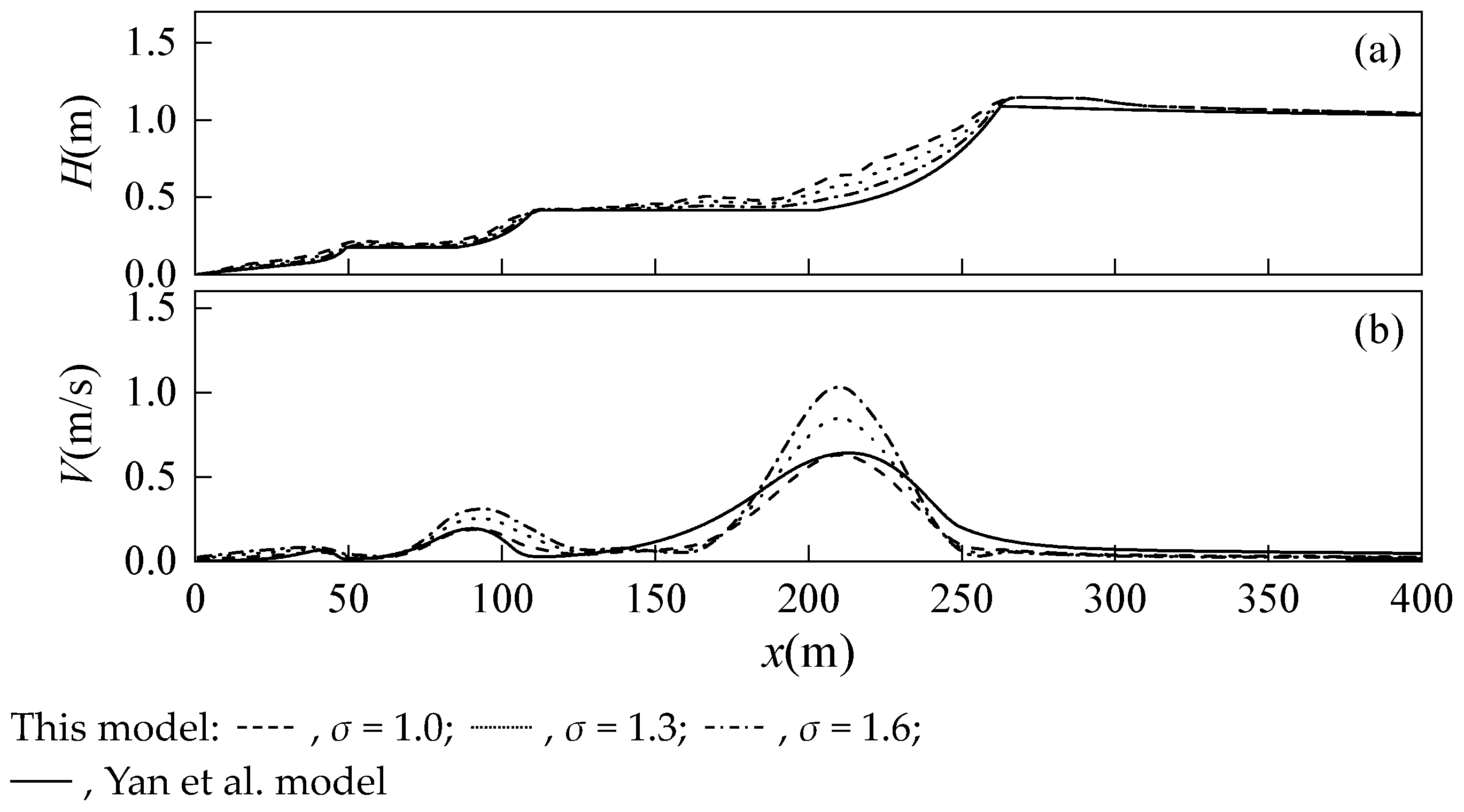
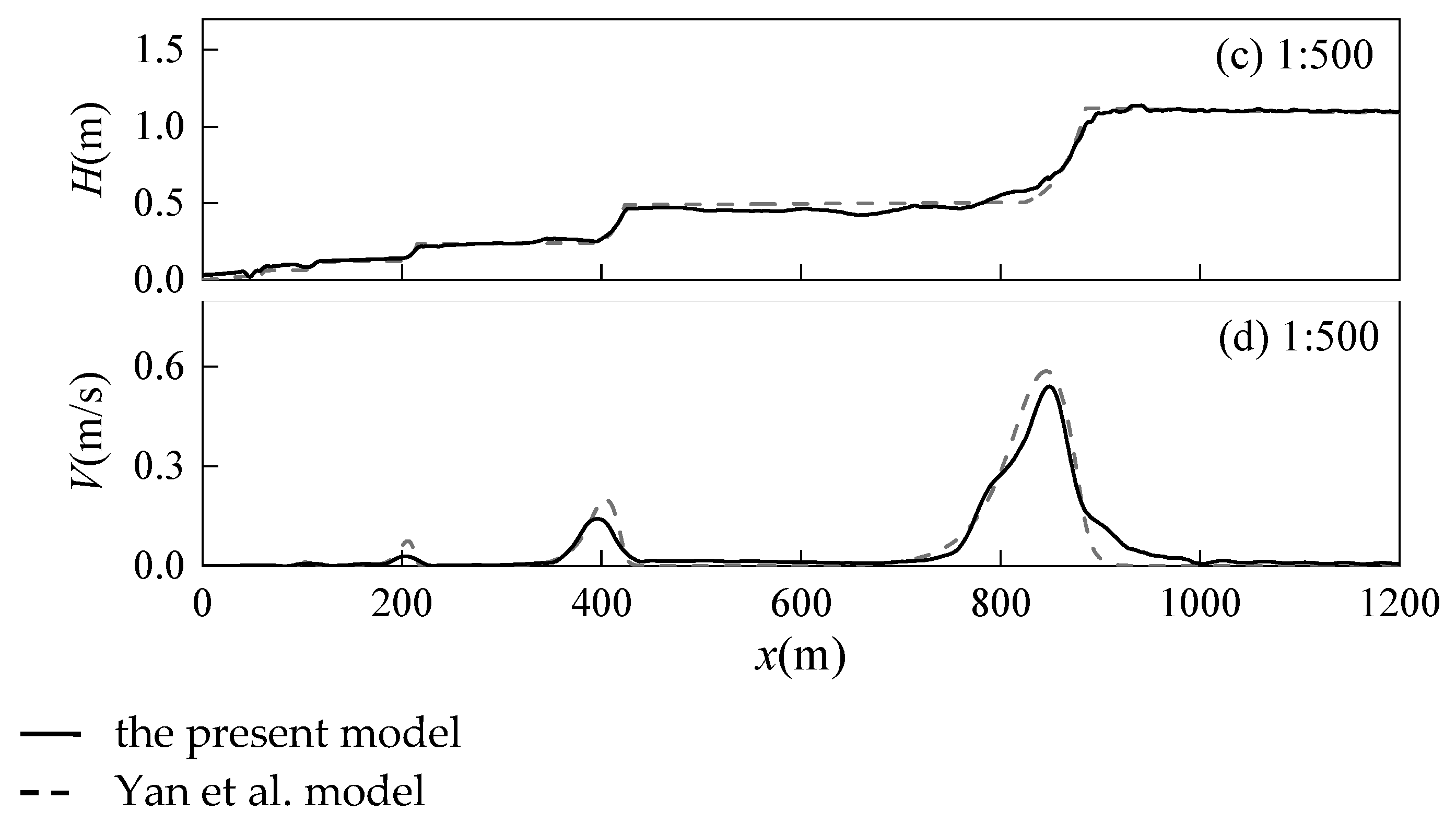
4.3. Comparison of Different Slopes
5. Model Application
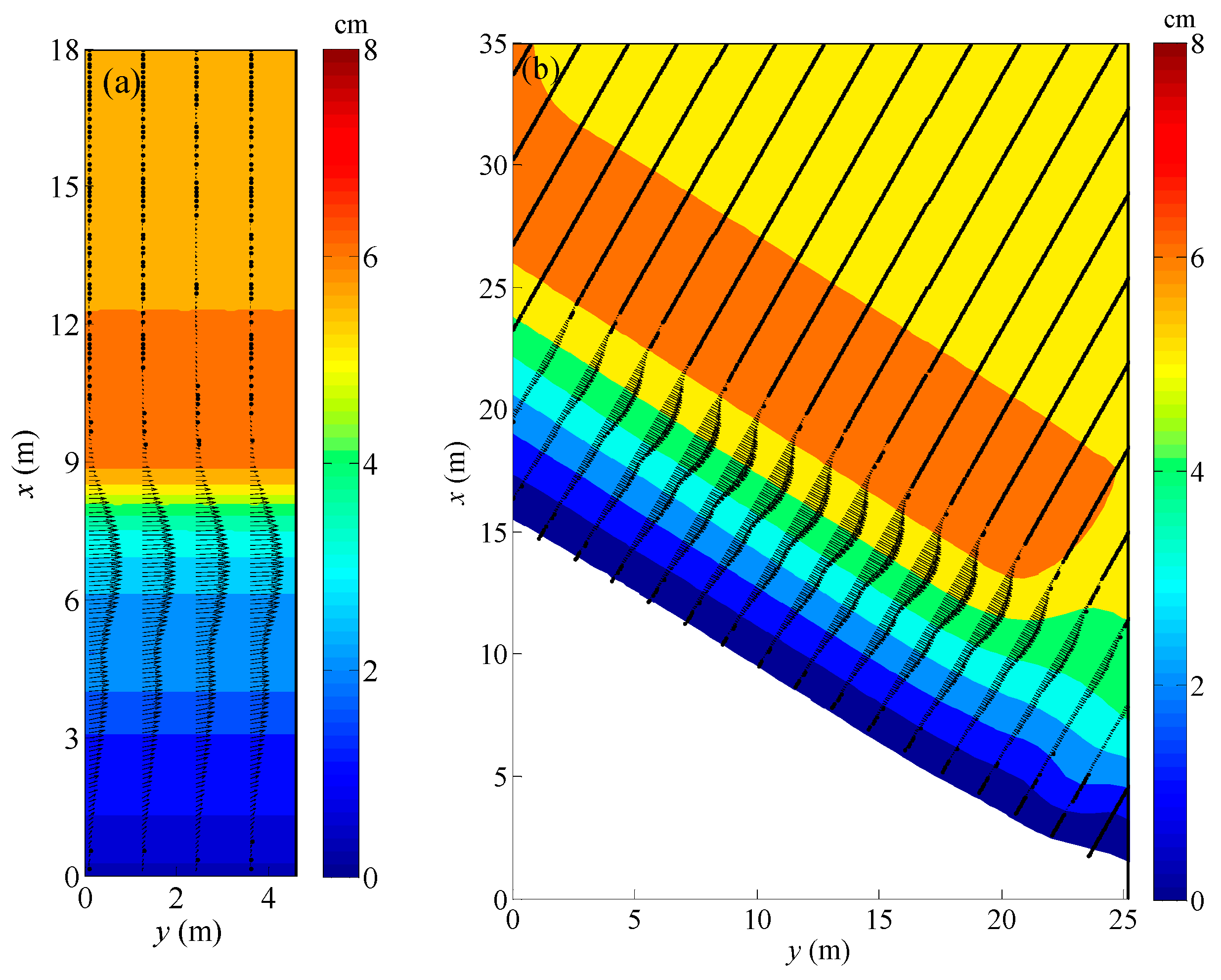
5.1. The Influence of Wave Incident Angles
5.2. The Influence of Wave Period
6. Conclusions
- (1)
- The wave recovery judgment condition Equation (21) applied to the wave average model is also applicable to the Boussinesq model. By modifying the wave breaking term during the wave breaking judgment process, the Boussinesq model has the ability to automatically judge wave recovery. This ability extends its previous ability to consider multiple wave breakings in sandbar topography conditions to multiple wave breakings in general situations (planar slope topography). By modifying the wave breaking term Equation (22), wave height can reach a balanced state of neither increasing nor decreasing during the wave recovery stage, and the comparison with experimental results also proves that this modification is reasonable. The general wave breaking judgment method Equation (19) can be applied to new wave breaking that occurs after the end of wave recovery.
- (2)
- The verification of different wave heights and slopes shows that this model can not only simulate the gentle topography with a slope of 1:100 in the experiment but also has the ability to simulate multiple wave breaks for gentler slopes of 1:300 and 1:500.
- (3)
- In the case of multiple wave breakings, the distribution of wave height does not change with the change in wave incident angle, while the distribution of longshore current velocity increases with the increase in wave incident angle; but the location of the double peak of the longshore current velocity remains unchanged, with the growth rate of the main peak being greater than that of the secondary peak, which makes the double-peak distribution of the longshore current velocity more obvious. The influence of wave period on the distribution of wave height is greater than that on the distribution of the longshore current velocity, which is manifested in the increase in wave height at the first breaking point with the increase in wave period and the trend toward offshore movement. The second breaking point is affected by wave recovery, and there is no obvious trend of change in terms of wave height. The distribution of the longshore current velocity is less affected by period and there is no significant change in the position of the double peak, with it only having some influence on the shape of the second peak.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, Y.; Yu, Y.; Cui, L.; Dong, G. Experimental study of wave breaking on gentle slope. China Ocean Eng. 2000, 14, 59–67. [Google Scholar]
- Church, J.C.; Thornton, E.B. Effects of breaking wave induced turbulence within a longshore current model. Coast. Eng. 1993, 20, 1–28. [Google Scholar] [CrossRef]
- Rogers, A.L.; Ravens, T.M. Measurement of Longshore Sediment Transport Rates in the Surf Zone on Galveston Island, Texas. J. Coast. Res. 2008, 24, 62–73. [Google Scholar] [CrossRef]
- Reniers, A.J.H.M.; Battjes, J.A. A laboratory study of longshore currents over barred and non-barred beaches. Coast. Eng. 1997, 31, 1–21. [Google Scholar] [CrossRef]
- Baum, S.K.; Basco, D.R. A Numerical Investigation of the Longshore Current Profile for Multiple Bar/Trough Beaches. In Proceedings of the 20th International Conference on Coastal Engineering, Taipei, Taiwan, 9–14 November 1986; pp. 971–985. [Google Scholar]
- Karjadi, E.A.; Kobayashi, N. Time-Dependent Quasi-3D Modeling of Breaking Waves on Beaches. In Coastal Engineering; ASCE: Reston, VA, USA, 2015; pp. 233–246. [Google Scholar] [CrossRef]
- Chen, Q.; Kirby, J.T.; Dalrymple, R.A.; Kennedy, A.B.; Thornton, E.B.; Shi, F. Boussinesq modelling of waves and longshore currents under field conditions. In Proceedings of the 27th Conference on Coastal Engineering, Sydney, Australia, 16–21 July 2000. [Google Scholar] [CrossRef]
- Elsayed, S.M.; Gijsman, R.; Schlurmann, T.; Goseberg, N. Nonhydrostatic Numerical Modeling of Fixed and Mobile Barred Beaches: Limitations of Depth-Averaged Wave Resolving Models around Sandbars. J. Waterw. Port Coast. Ocean Eng. 2022, 148, 04021045. [Google Scholar] [CrossRef]
- Shen, L.D.; Gui, Q.; Zou, Z.L.; He, L.L.; Chen, W.; Jiang, M. Experimental study and numerical simulation of mean longshore current for mild slope. Wave Motion 2020, 99, 102651. [Google Scholar] [CrossRef]
- Yan, S.; Zou, Z.L.; Shen, L.D.; Wang, Y. A Calculation Model for Multiple-Breaking Waves and Wave-induced Currents on Very Gentle Beaches. J. Waterw. Port Coast. Ocean Eng. 2021, 147, 04021017. [Google Scholar] [CrossRef]
- Tajima, Y.; Madsen, O.S. Modeling near-shore waves, surface rollers, and undertow velocity profiles. J. Waterw. Port Coast. Ocean Eng. 2006, 132, 429–438. [Google Scholar] [CrossRef]
- Dutykh, D.; Katsaounis, T.; Mitsotakis, D. Finite volume schemes for dispersive wave propagation and runup. J. Comput. Phys. 2011, 230, 3035–3061. [Google Scholar] [CrossRef]
- Abroug, I.; Abcha, N.; Dutykh, D.; Jarno, A.; Marin, F. Experimental and numerical study of the propagation of focused wave groups in the nearshore zone. Phys. Lett. A 2020, 384, 126144. [Google Scholar] [CrossRef]
- Abdalazeez, A.; Didenkulova, I.; Dutykh, D. Dispersive Effects During Long Wave Run-up on a Plane Beach. In Advances in Natural Hazards and Hydrological Risks: Meeting the Challenge; Fernandes, F., Malheiro, A., Chaminé, H., Eds.; Springer: Cham, Switzerland, 2020; pp. 143–146. [Google Scholar] [CrossRef]
- Clamond, D.; Dutykh, D.; Mitsotakis, D. A Variational Approach to Water Wave Modelling (Vol. 3); International Association for Hydro-Environment Engineering and Research (IAHR): Madrid, Spain, 2024. [Google Scholar] [CrossRef]
- van Groesen, E.; Andonowati, A. Hamiltonian Boussinesq formulation of wave–ship interactions. Appl. Math. Model. 2016, 42, 133–144. [Google Scholar] [CrossRef]
- Tuozzo, S.; Di Leo, A.; Buccino, M.; Calabrese, M. Boussinesq Modelling of Shallow Water Phenomena. Environ. Sci. Proc. 2022, 21, 64. [Google Scholar] [CrossRef]
- Postacchini, M.; Melito, L.; Ludeno, G. Nearshore Observations and Modeling: Synergy for Coastal Flooding Prediction. J. Mar. Sci. Eng. 2023, 11, 1504. [Google Scholar] [CrossRef]
- Mesloub, S.; Gadain, H.E. On Some Initial and Initial Boundary Value Problems for Linear and Nonlinear Boussinesq Models. Symmetry 2019, 11, 1273. [Google Scholar] [CrossRef]
- Wingate, B.A.; Rosemeier, J.; Haut, T. Mean Flow from Phase Averages in the 2D Boussinesq Equations. Atmosphere 2023, 14, 1523. [Google Scholar] [CrossRef]
- Dalrymple, R.A.; Liu, L.F. Waves over Soft Muds: A Two-Layer Fluid Model. J. Phys. Oceanogr. 1978, 8, 1121–1131. [Google Scholar]
- Zou, Z.L.; Fang, K.Z. Alternative forms of the higher-order Boussinesq equations: Derivations and validations. Coast. Eng. 2008, 55, 506–521. [Google Scholar] [CrossRef]
- Kennedy, A.B.; Chen, Q.; Kirby, J.T.; Dalrymple, R.A. Boussinesq modeling of wave transformation, breaking and runup. I: One dimension. J. Waterw. Port Coast. Ocean Eng. 2000, 126, 39–47. [Google Scholar] [CrossRef]
- Gobbi, M.F.; Kirby, J.T. Wave evolution over submerged sills: Tests of a high-order Boussinesq model. Coast. Eng. 1999, 37, 57–96. [Google Scholar] [CrossRef]
- Kim, G.; Lee, C.; Suh, K.D. Generation of random waves in time-dependent extended mild-slope equations using a source function method. Ocean Eng. 2006, 33, 2047–2066. [Google Scholar] [CrossRef]
- Chen, Q.; Kirby, J.T.; Dalrymple, R.A.; Kennedy, A.B.; Chawla, A. Boussinesq modeling of wave transformation, breaking and runup. II: Two horizontal dimensions. J. Waterw. Port Coast. Ocean Eng. 2000, 126, 48–56. [Google Scholar] [CrossRef]
- Willmott, C.J. On the validation of models. Phys. Geogr. 1981, 2, 184–194. [Google Scholar] [CrossRef]
- Li, X.; Zhang, W. Application of Snell’s law in reflection raytracing using the multistage fast marching method. Earthq. Res. Adv. 2021, 1, 100009. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | T (s) | H (cm) |
|---|---|---|
| T1H1/H2/H3 | 1 | 2.34/4.90/5.95 |
| T1.5H1/H2/H3 | 1.5 | 2.53/4.91/5.30 |
| T2H1/H2/H3 | 2 | 3.16/4.57/5.62 |
| T1H1 | T1H2 | T1H3 | T1.5H1 | T1.5H2 | T1.5H3 | T2H1 | T2H2 | T2H3 | |
|---|---|---|---|---|---|---|---|---|---|
| T (s) | 1 | 1 | 1 | 1.5 | 1.5 | 1.5 | 2 | 2 | 2 |
| H (cm) | 2.29 | 4.94 | 5.94 | 2.53 | 4.93 | 5.53 | 3.63 | 4.56 | 5.30 |
| Nw | 1 | 2 | 2 | 1 | 2 | 2 | 1 | 2 | 2 |
| Nv | 1 | 2 | 2 | 1 | 2 | 2 | 1 | 2 | 2 |
| SWB | No | Yes | Yes | No | Yes | Yes | No | Yes | Yes |
| Boundary Condition | WIA-H | WIA-V | Average |
|---|---|---|---|
| Solid | 0.986 | 0.952 | 0.969 |
| Periodic | 0.984 | 0.913 | 0.948 |
| Wave Incidence Angle (°) | Primary Peak Location | Secondary Peak Location |
|---|---|---|
| 10 | 0.108 | 0.071 |
| 20 | 0.213 | 0.139 |
| 30 | 0.312 | 0.204 |
| 40 | 0.401 | 0.262 |
| 50 | 0.477 | 0.313 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bian, H.; Zou, Z.; Yan, S. A Computation Model for Coast Wave Motions with Multiple Breakings. J. Mar. Sci. Eng. 2024, 12, 860. https://doi.org/10.3390/jmse12060860
Bian H, Zou Z, Yan S. A Computation Model for Coast Wave Motions with Multiple Breakings. Journal of Marine Science and Engineering. 2024; 12(6):860. https://doi.org/10.3390/jmse12060860
Chicago/Turabian StyleBian, Hongwei, Zhili Zou, and Sheng Yan. 2024. "A Computation Model for Coast Wave Motions with Multiple Breakings" Journal of Marine Science and Engineering 12, no. 6: 860. https://doi.org/10.3390/jmse12060860