
Conceptual Design and Structural Performance Analysis of an Innovative Deep-Sea Aquaculture Platform




Abstract
1. Introduction
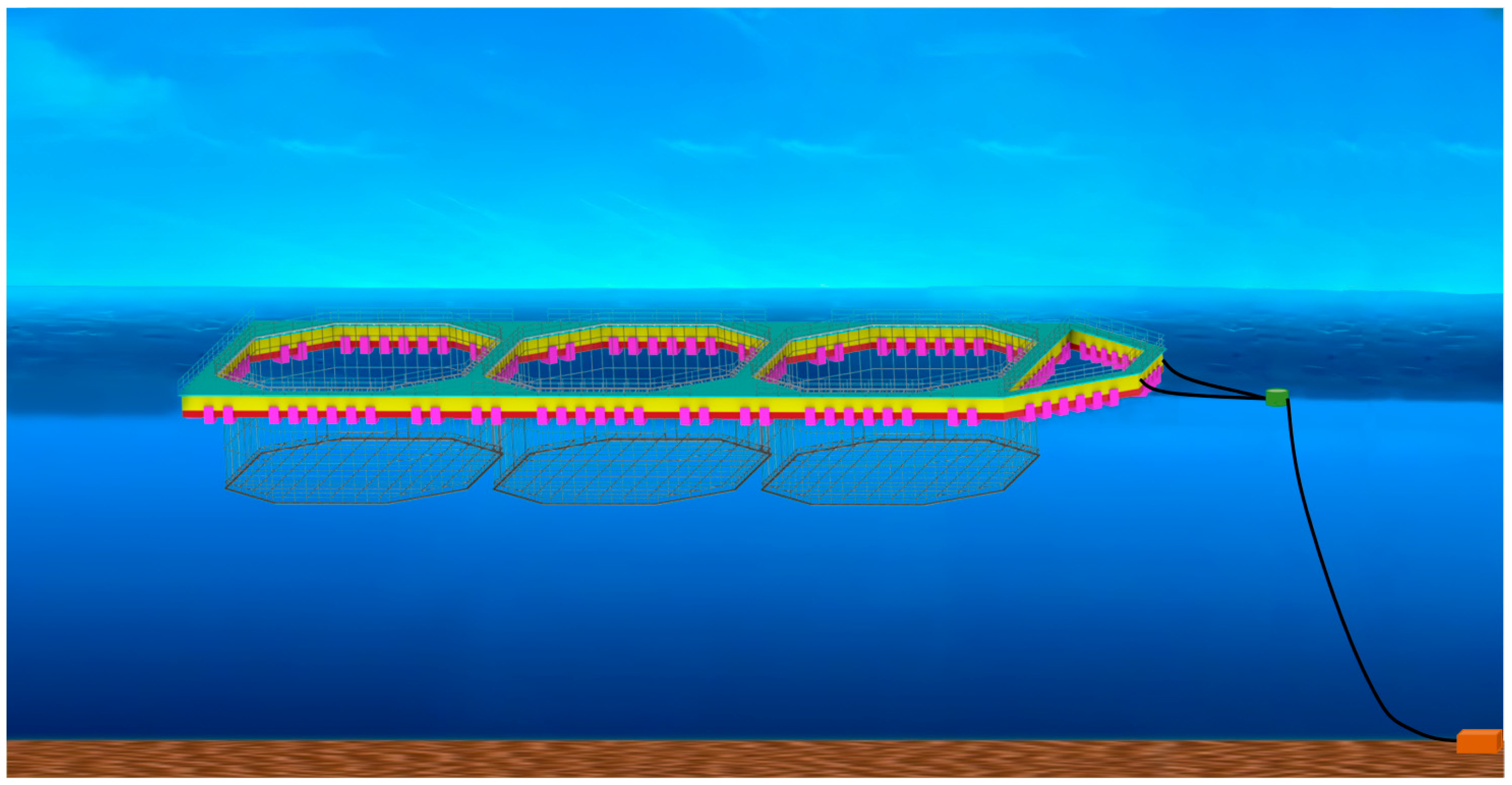
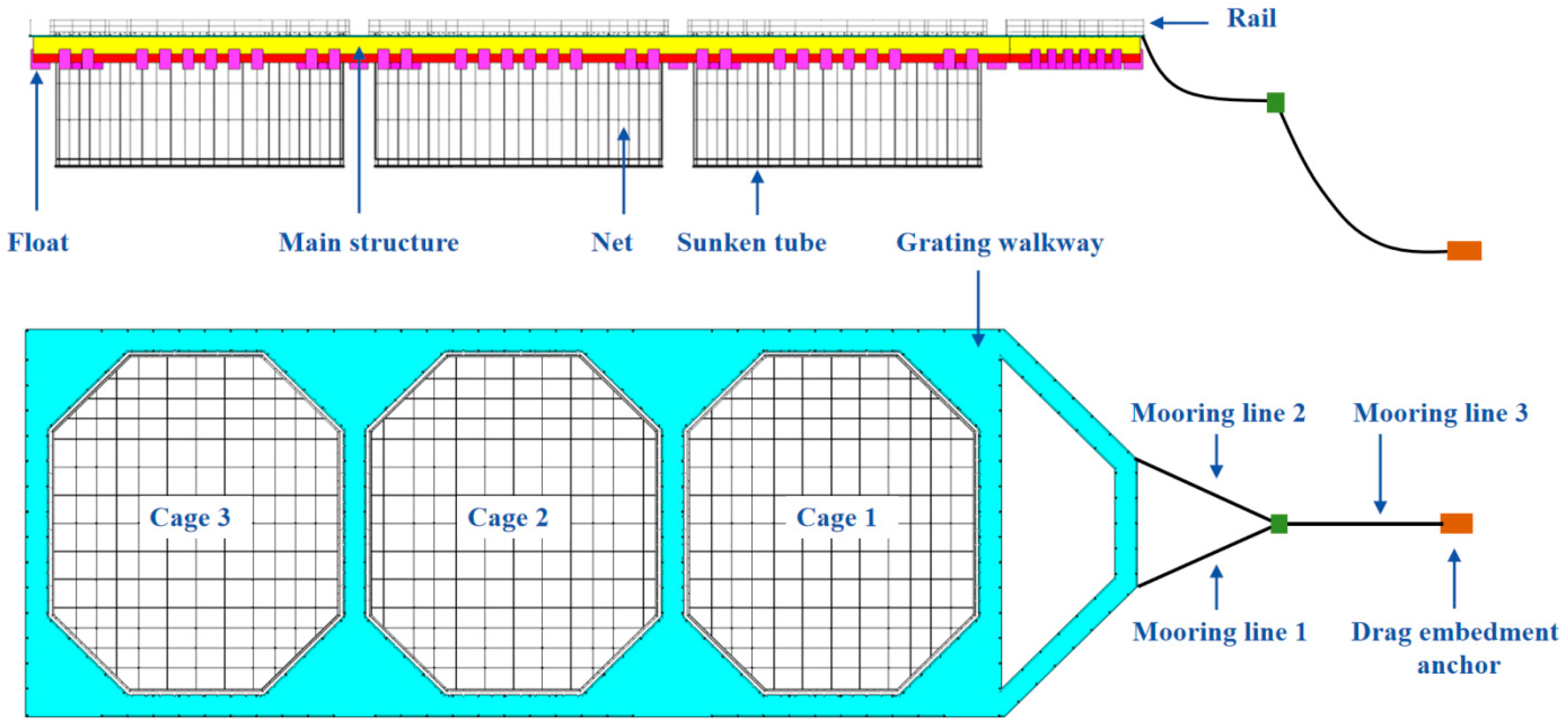
2. Proposed Conceptual Design of the Deep-Sea Aquaculture Platform
3. Methodology for Conceptual Design and Structural Performance Analysis
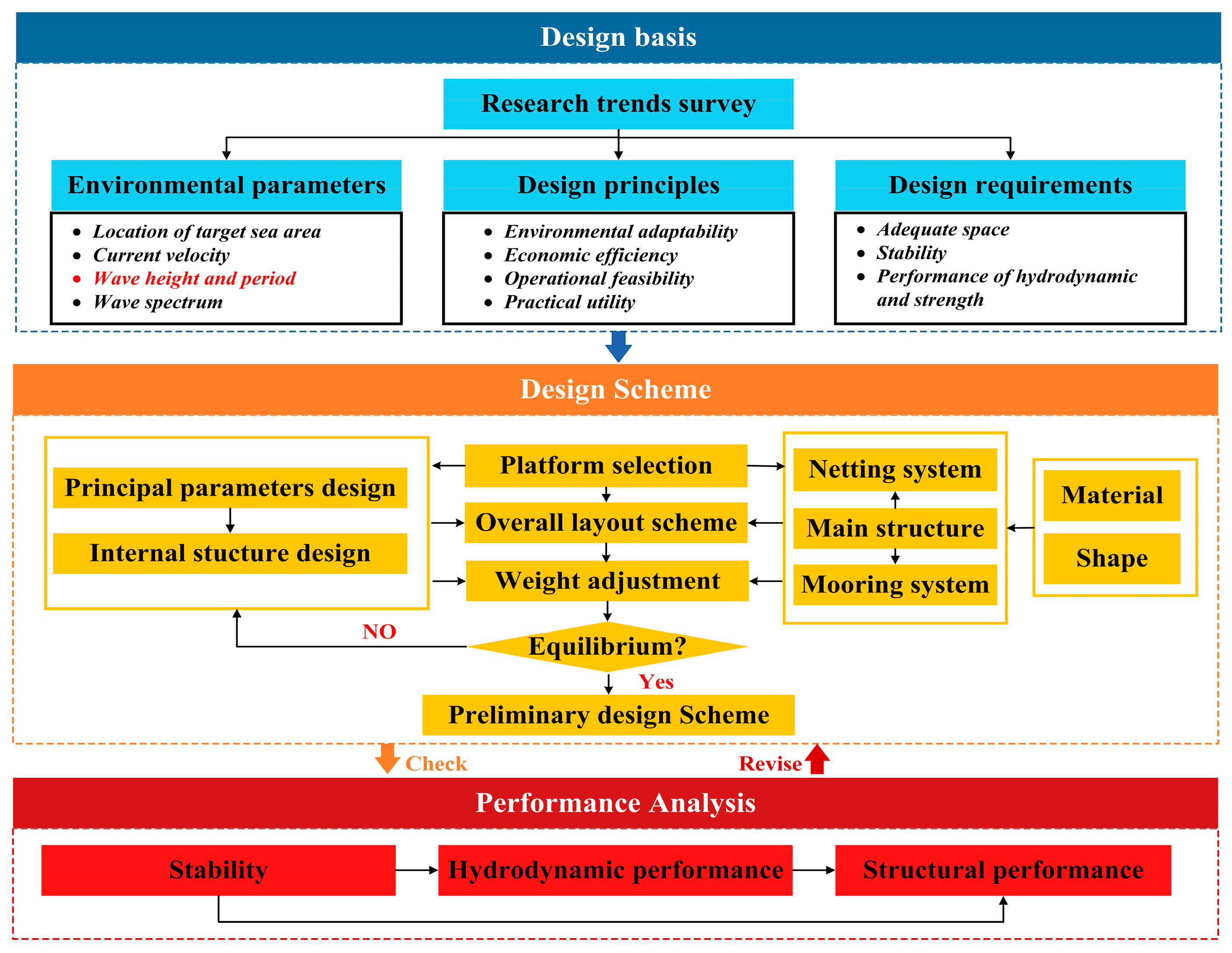
3.1. Framework and Key Process of the Methodology
- (1)
- Design basis. At this stage, an extensive review was conducted to explore the current research trends in deep-sea aquaculture equipment. On this basis, the environmental parameters of the designated deployment area were determined for the innovative deep-sea aquaculture platform, including current speed, wave height, wave period, and wave spectrum. These factors were integrated with the design principles and requirements of aquaculture equipment to define essential parameters for the design and analysis of the platform.
- (2)
- Design scheme. At this stage, an interactive conceptual design approach was utilized to initiate the design of an innovative deep-sea aquaculture platform, covering the main structure, the mooring system, and the netting system. Orthogonal experimental methods were applied to select the optimal principal dimensions and configure the internal structure of the platform. The initial design phase set the basis for subsequent performance analyses by providing essential model parameters.
- (3)
- Performance analysis. Based on the conceptual design, a novel method was proposed suitable for selecting characteristic load conditions for the innovative deep-sea aquaculture platform. Based on the stochastic design wave method, design wave parameters were calculated to evaluate the platform’s strength performance, structural vulnerabilities, and overall safety under various characteristic load conditions.
3.2. Design Principles and Methods of the Platform
3.2.1. Design Principles
3.2.2. Conceptual Design Method
3.2.3. Optimization Method for the Platform Principal Scales
3.3. Environmental Design Criteria
3.4. Wave Load Calculation Methods
3.4.1. Stochastic Design Wave Method
- (1)
- Based on the structural characteristics and the specific maritime region of the structure, select suitable wave directions, periods (frequencies), and increments to calculate the Response Amplitude Operator (RAO) function, RAO(ω).
- (2)
- Select the wave direction and period (frequency) corresponding to the maximum value on the characteristic load response curve to serve as the direction and period (frequency) of the design wave. Determine the wave phase through phase-frequency analysis.
- (3)
- Define a zero-crossing period interval for irregular waves between 3 and 18 s, with a step size of 0.1 s, and calculate the significant wave height using the wave steepness formula for irregular waves within this interval [30], as presented in Equation (8) as follows:
- (4)
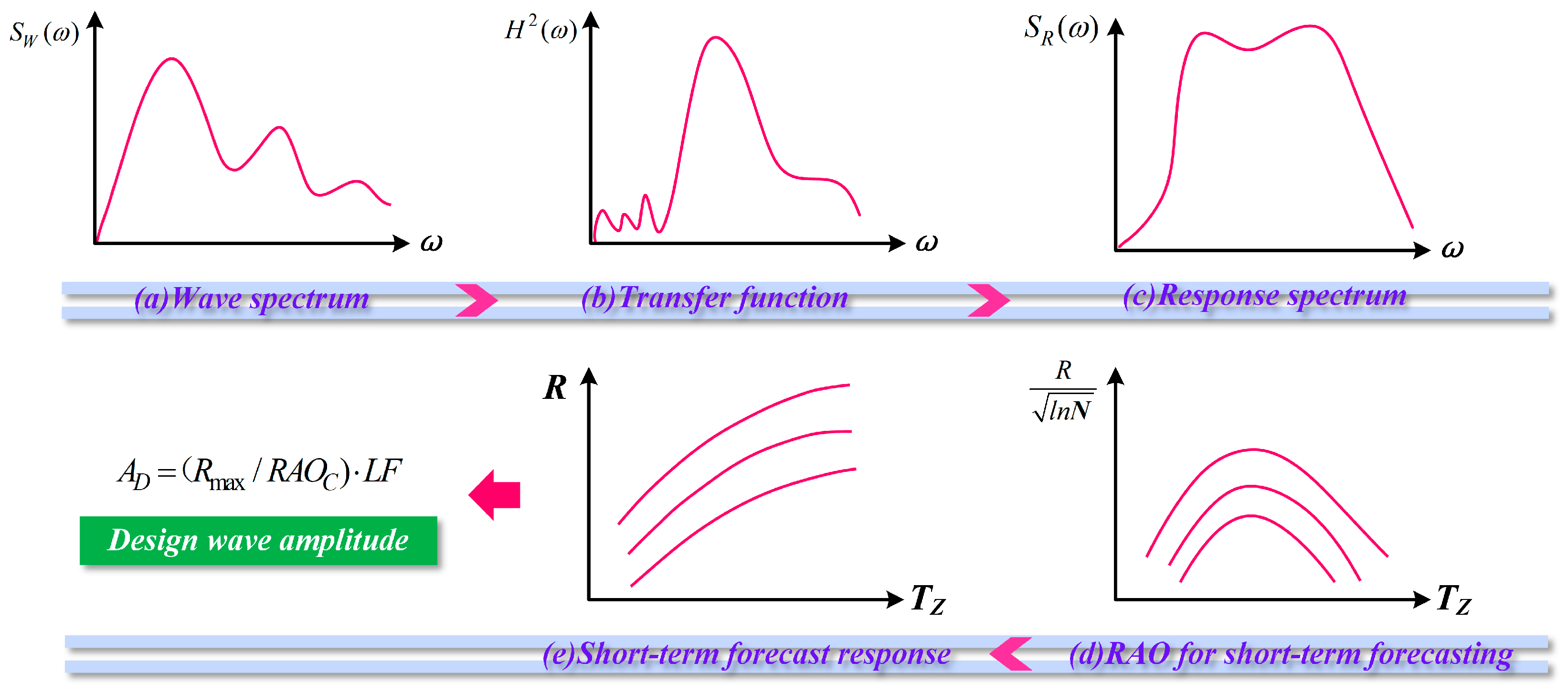
- Select an appropriate wave spectrum and compute the wave spectrum density function, SW(ω), for each short-term sea condition.
- (5)
- Multiply the square of the RAO(ω) amplitude by the wave spectrum density function, SW(ω), to derive the characteristic load response spectrum, SR(ω), for each short-term sea condition.
- (6)
- Forecast the maximum response value, Rmax, of the characteristic loads under each short-term sea condition using the characteristic load response spectrum, SR(ω).
- (7)
- Calculate the wave amplitude, AD, of the stochastic design wave method using Equation (13), where the design wave height is twice the wave amplitude.
3.4.2. Wave Load Conditions Selection Method
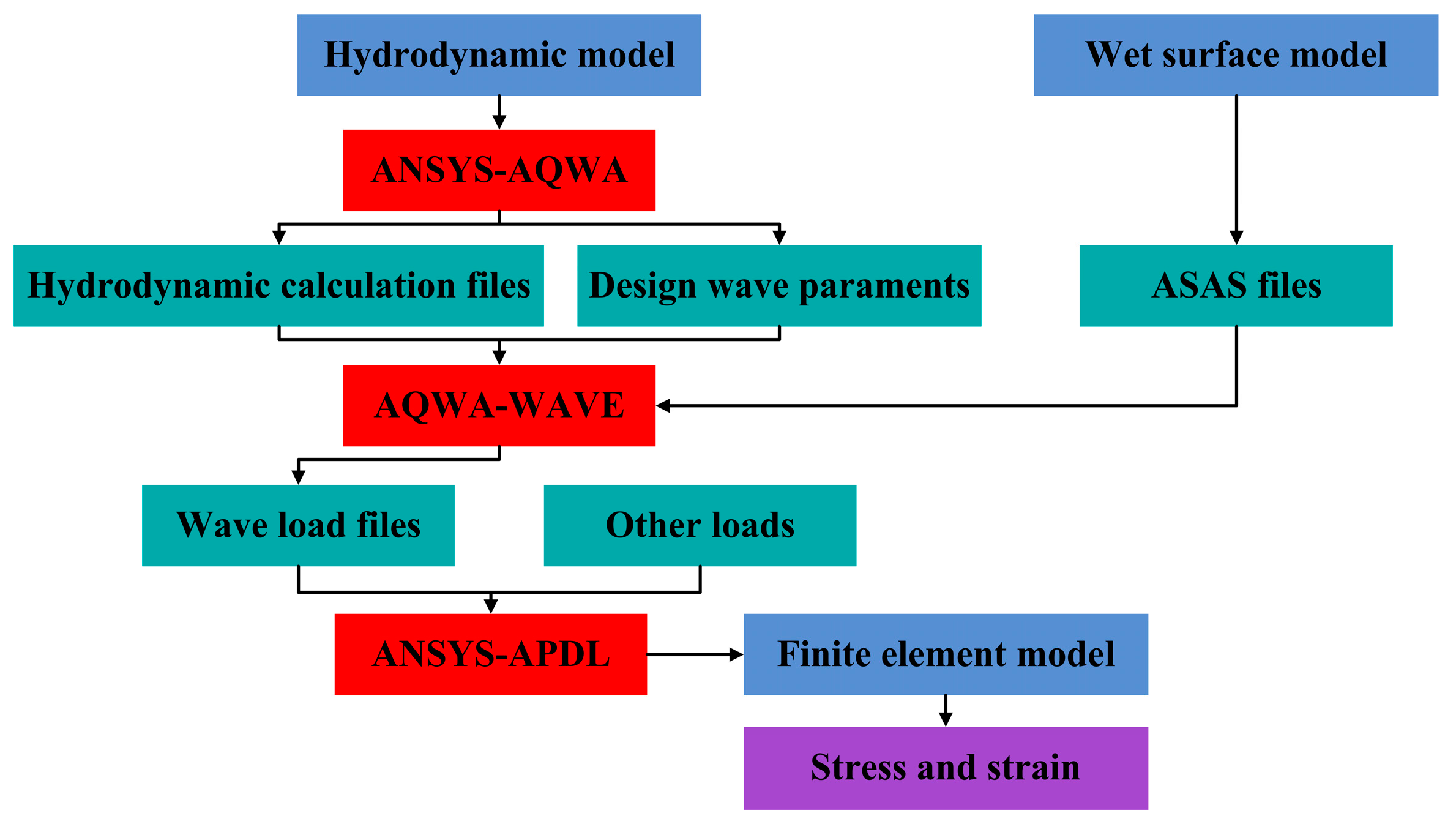
3.5. Structural Strength Analysis Method
4. Case Study
4.1. Design Scheme of the Deep-Sea Aquaculture Platform
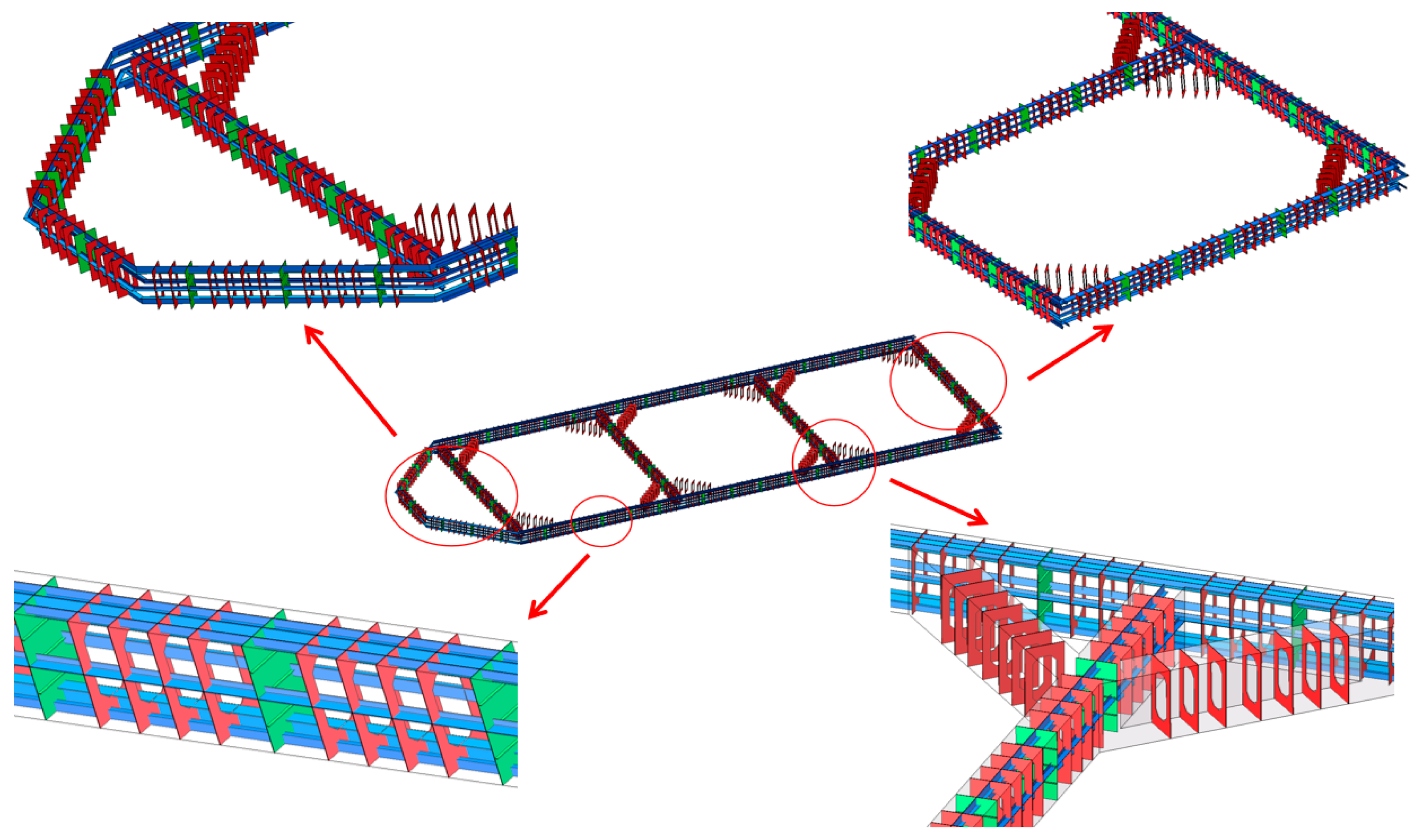
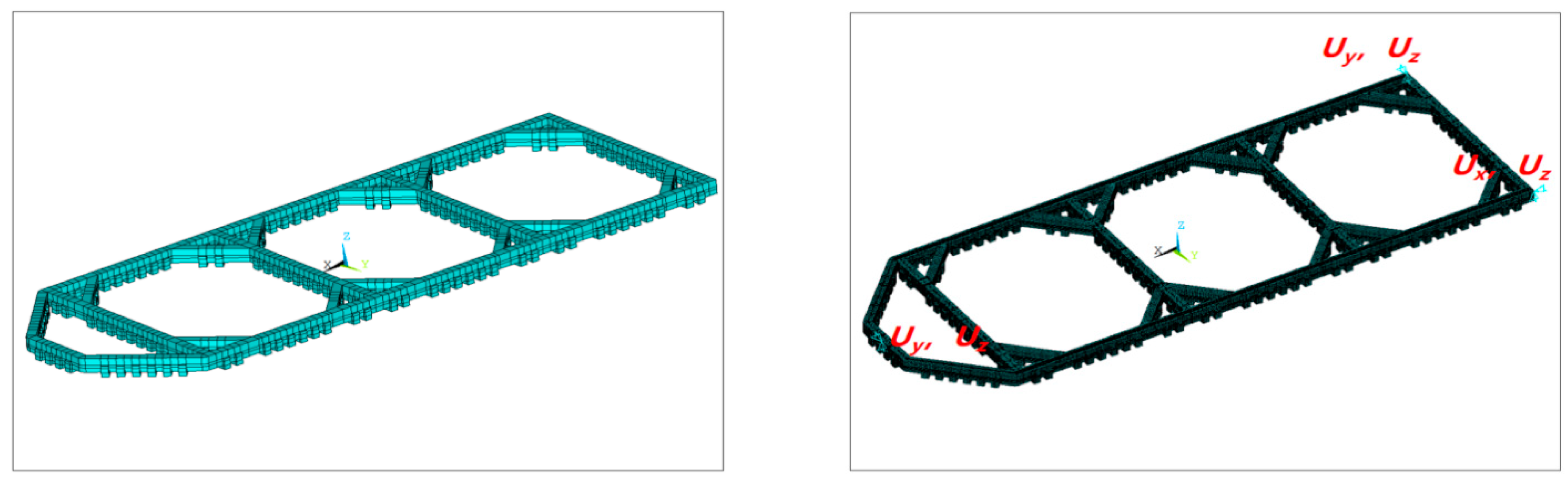
4.2. Numerical Model of the Deep-Sea Aquaculture Platform
5. Results Analysis
5.1. Optimization Results of the Principal Scale Parameters
5.2. Structural Performance Analysis under the Characteristic Load Conditions
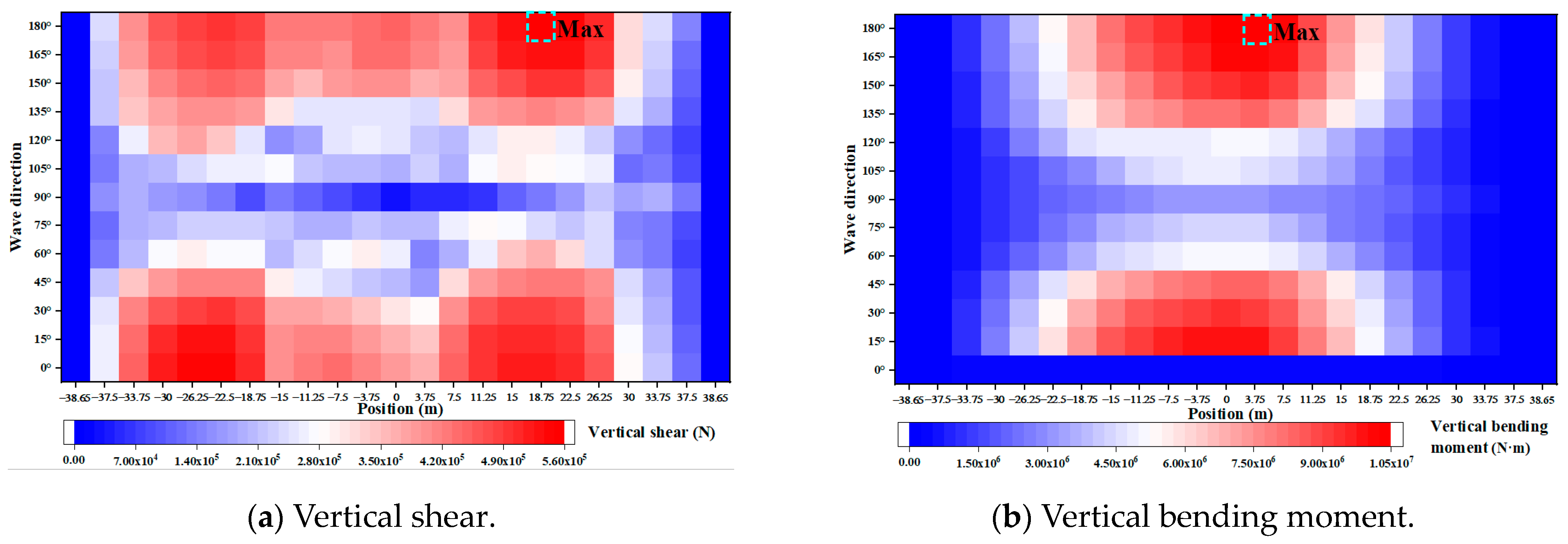
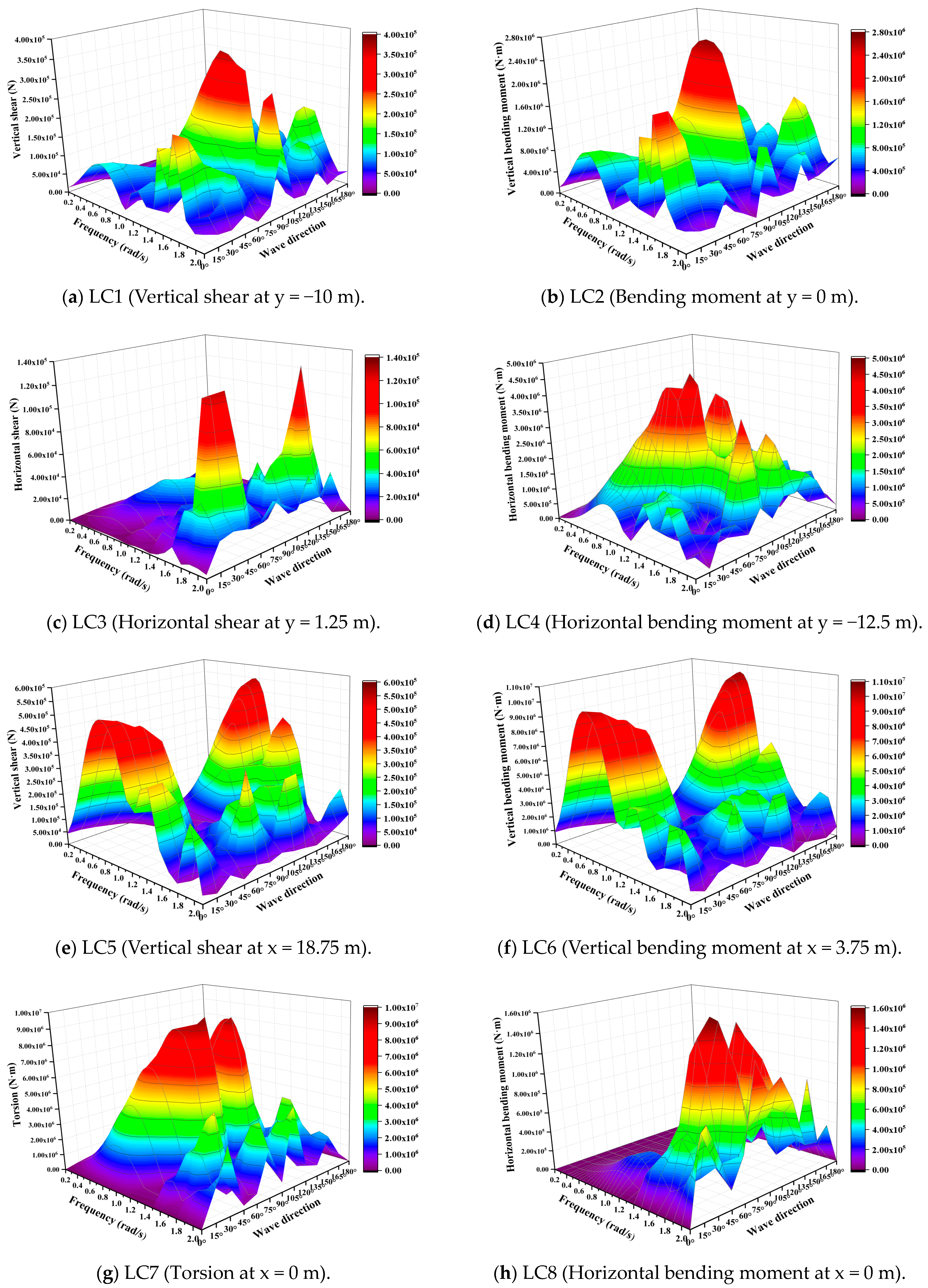
5.2.1. Selection of the Characteristic Load Conditions
5.2.2. Analysis of the Design Wave Parameters
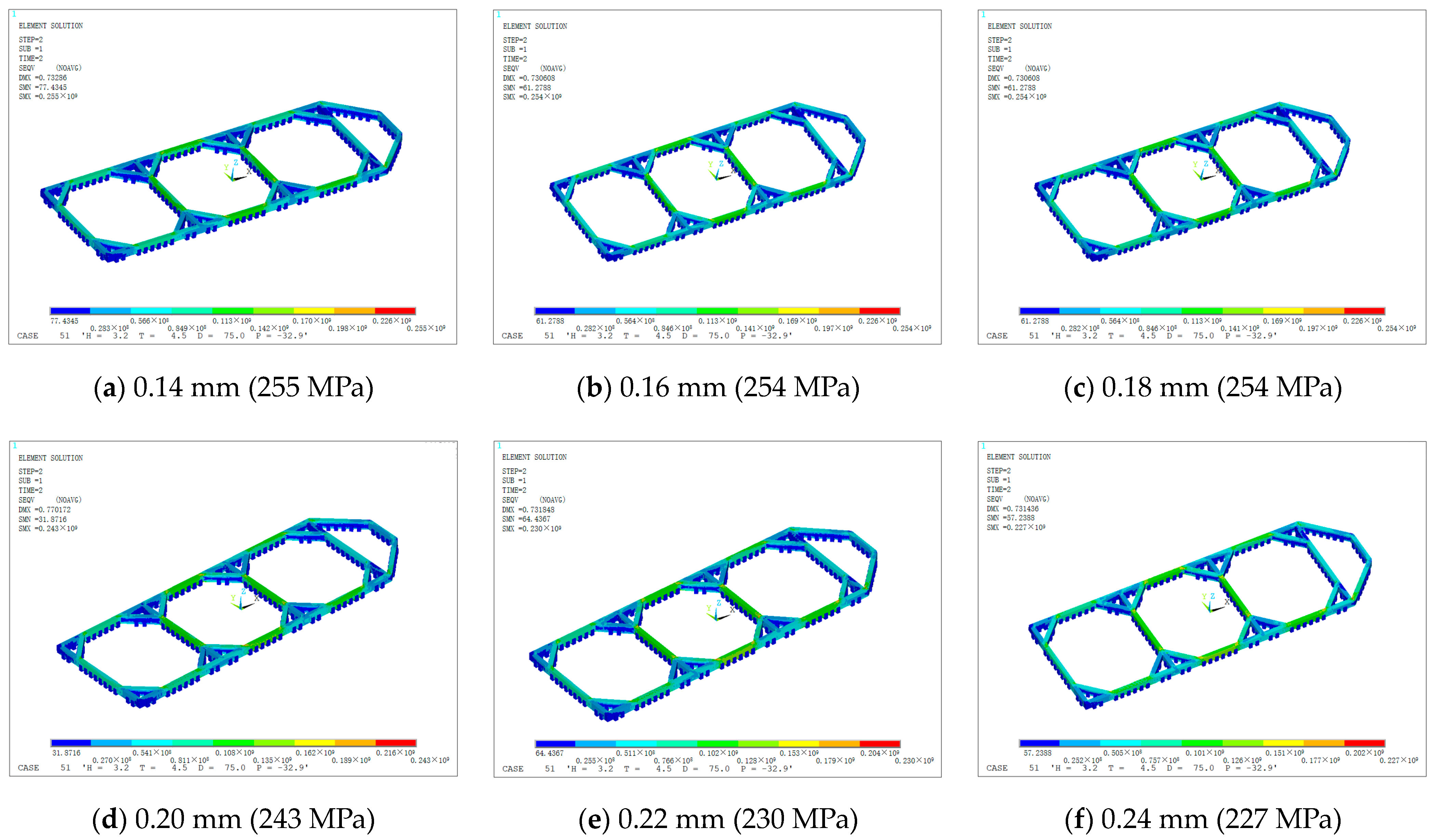
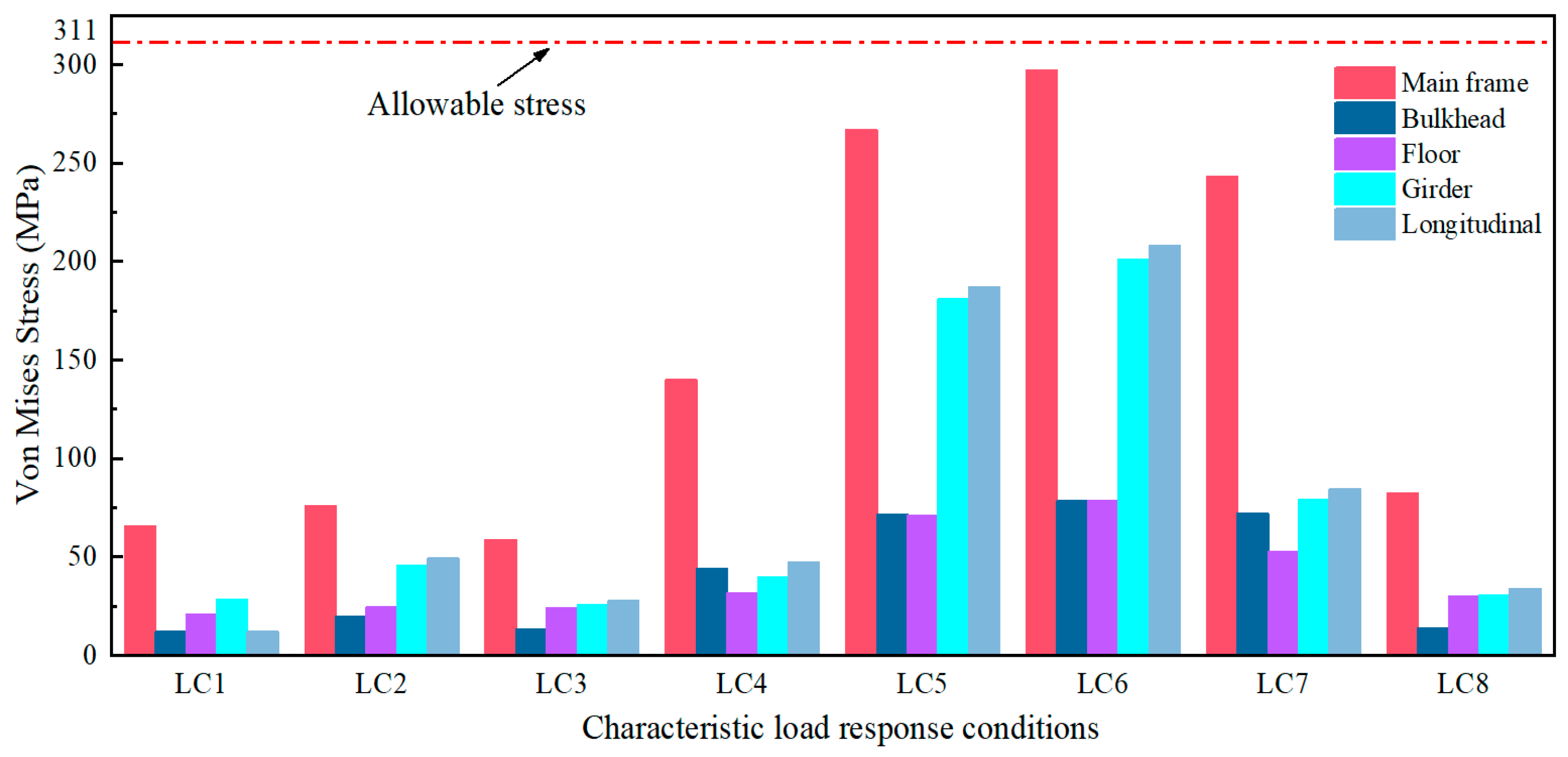
5.2.3. Structural Strength Analysis and Calibration
6. Conclusions
- (1)
- The length of the platform significantly influences the heave and pitch amplitudes, while its width prominently affects the cost coefficient. An optimal set of primary dimensions was identified, comprising a bow width of 8 m, a length of 75 m, and a width of 25 m, which balances the hydrodynamic performance and construction costs effectively.
- (2)
- The short-term forecasts of characteristic loads reveal that the vertical bending moment at x = 3.75 m and the torsion at x = 0 m exhibit higher response values compared to other conditions, indicating the need for targeted structural reinforcement at these locations in the design phase.
- (3)
- The Von Mises stresses of all sections of the platform are lower than the allowable limits of the materials used. However, stress levels were relatively higher under vertical shear, vertical bending, and horizontal torsion conditions. These scenarios require special attention in the design phase to ensure the overall structural integrity under wave action. In addition, high-stress regions are identified as the connections between diagonal braces and the main frame and where the bow diagonally connects to the first cage area, which targets fatigue life assessments.
- (4)
- The innovative deep-sea aquaculture platform proposed in this paper is still in the preliminary stages of design and analysis and requires further refinement. Future work should focus on the following tasks to enhance and validate the design scheme. To further improve and verify the design, it is essential to optimize the conceptual design of the novel deep-sea aquaculture platform, as well as to develop physical models and conduct experiments. Additionally, incorporating a netting system is necessary to evaluate the structural performance of the platform. Comparative analysis of the platform’s structural performance with and without the netting system should also be conducted.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sievers, M.; Korsoen, O.; Warren-Myers, F.; Oppedal, F.; Macaulay, G.; Folkedal, O.; Dempster, T. Submerged cage aquaculture of marine fish: A review of the biological challenges and opportunities. Rev. Aquac. 2022, 14, 106–119. [Google Scholar] [CrossRef]
- Chu, Y.; Wang, C.M.; Park, J.C.; Lader, P.F. Review of cage and containment tank designs for offshore fish farming. Aquaculture 2020, 519, 734928. [Google Scholar] [CrossRef]
- Liu, H.Y.; Pang, G.; Xiong, Y.; Yang, S.; Yuan, T.; Chen, X.; Huang, X.; Yuan, S. Material mechanics properties and critical analyses of fish farm netting and trusses. Ocean Eng. 2024, 292, 116512. [Google Scholar] [CrossRef]
- Gutierrez-Romero, J.E.; Lorente-Lopez, A.J.; Zamora-Parra, B. Numerical analysis of fish farm behaviour in real operational conditions. Ships Offshore Struct. 2020, 15, 737–752. [Google Scholar] [CrossRef]
- Kristiansen, T.; Faltinsen, O.M. Experimental and numerical study of an aquaculture net cage with floater in waves and current. J. Fluids Struct. 2015, 54, 1–26. [Google Scholar] [CrossRef]
- Fu, S.; Moan, T. Dynamic analyses of floating fish cage collars in waves. Aquac. Eng. 2012, 47, 7–15. [Google Scholar] [CrossRef]
- Lee, C.W.; Lee, J.; Park, S. Dynamic behavior and deformation analysis of the fish cage system using mass-spring model. China Ocean Eng. 2015, 29, 311–324. [Google Scholar] [CrossRef]
- Zhao, Y.; Bai, X.; Dong, G.; Bi, C. Deformation and stress distribution of floating collar of net cage in steady current. Ships Offshore Struct. 2019, 14, 371–383. [Google Scholar] [CrossRef]
- Liu, H.; Huang, X.; Pang, G.; Yuan, T.; Hu, Y.; Yuan, S. Structural mechanical properties of circular fish cages determined by finite element analysis and material test. Ocean Eng. 2022, 261, 112083. [Google Scholar] [CrossRef]
- Liu, H.; Huang, X.; Wang, S.; Hu, Y.; Yuan, T.; Guo, G. Evaluation of the structural strength and failure for floating collar of a single-point mooring fish cage based on finite element method. Aquac. Eng. 2019, 85, 32–48. [Google Scholar] [CrossRef]
- Huang, X.; Guo, G.; Tao, Q.; Hu, Y.; Liu, H.; Wang, S.; Hao, S. Dynamic deformation of the floating collar of a net cage under the combined effect of waves and current. Aquac. Eng. 2018, 83, 47–56. [Google Scholar] [CrossRef]
- Huang, X.; Guo, G.; Tao, Q.; Hu, Y.; Liu, H.; Wang, S.; Hao, S. Numerical simulation of deformations and forces of a floating fish cage collar in waves. Aquac. Eng. 2016, 74, 111–119. [Google Scholar] [CrossRef]
- Li, L.; Fu, S.; Li, R. Dynamic analysis of aquaculture fish cages in irregular waves. In Proceedings of the ASME 32nd International Conference on Ocean, Offshoreand Arctic Engineering, Nantes, France, 9–14 June 2013; Volume 3. [Google Scholar]
- Li, L.; Fu, S.; Xu, Y.; Wang, J.; Yang, J. Dynamic responses of floating fish cage in waves and current. Ocean Eng. 2013, 72, 297–303. [Google Scholar] [CrossRef]
- Li, L.; Fu, S.; Xu, Y. Nonlinear hydroelastic analysis of an aquaculture fish cage in irregular waves. Mar. Struct. 2013, 34, 56–73. [Google Scholar] [CrossRef]
- Xu, T.; Hou, H.; Dong, G.; Zhao, Y.; Guo, W. Structural analysis of float collar for metal fish cage in waves. Turk. J. Fish. Quat. Sci. 2017, 17, 257–268. [Google Scholar]
- Zhang, Y.; Guo, H.; Liu, S.; Liu, Q.; Guo, J. Fatigue vulnerability of sea cage to storm wave loads. J. Mar. Sci. Technol. 2023, 28, 153–164. [Google Scholar] [CrossRef]
- Sun, S.; Li, H.; Muk, C.O.; Li, L. Design load and yielding strength analyses of the floating structure of a truss-type offshore cage. J. Harbin Eng. Univ. 2022, 43, 340–347. [Google Scholar]
- Zitti, G.; Novelli, N.; Brocchini, M. Dynamics of a pile-moored fish cages in current and waves: A numerical study. Ocean Eng. 2023, 269, 113571. [Google Scholar] [CrossRef]
- Zitti, G.; Novelli, N.; Brocchini, M. Preliminary results on the dynamics of a pile-moored fish cage with elastic net in currents and waves. J. Mar. Sci. Eng. 2021, 9, 14. [Google Scholar] [CrossRef]
- Ma, H. Study on Structural Strength and Ftigue Analyses of Platform Net Cage. Ph.D. Thesis, Wuhan University of Technology, Wuhan, China, 2022. [Google Scholar]
- Zhang, J. Research on Design Load and Structural Strength Assessment Methods of Deep-Sea Floating Cage. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2023. [Google Scholar]
- Pang, G.; Huang, X.; Chen, C.; Yuan, T.; Hu, Y.; Wang, S.; Sun, C. Research on structural safety evaluation of jack-up offshore net cage under different conditions. Prog. Fish. Sci. 2022, 43, 56–68. [Google Scholar]
- Milich, M.; Drimer, N. Design and analysis of an innovative concept for submerging open-sea aquaculture system. IEEE J. Ocean. Eng. 2019, 44, 707–718. [Google Scholar] [CrossRef]
- Zhang, Y.C.; Zhang, J.; Jiang, C.Q.; Zhang, Z.D.; Xu, P.; Zhang, Y. Hydrodynamic and structural optimization of a truss-floating aquaculture vessel. J. Mar. Sci. Eng. 2023, 11, 2385. [Google Scholar] [CrossRef]
- Cao, Y.; Li, Z.; Wang, K.W.; Ye, Q. Sensitivity of dynamic response of truss-type aquaculture platform to floating body arrangement. J. Mar. Sci. Eng. 2024, 12, 431. [Google Scholar] [CrossRef]
- Wang, C.M.; Nguyen, H.P. Advances in research and developments on offshore aquaculture and renewable energy production. In Proceedings of the Third International Conference on Sustainable Civil Engineering and Architecture, Da Nang City, Vietnam, 19–21 July 2023; Lecture Notes in Civil Engineering. Springer: Singapore, 2024; pp. 3–22. [Google Scholar]
- CCS. Guidelines for Offshore Aquaculture Facilities; China Communications Press: Beijing, China, 2023. [Google Scholar]
- Qiao, S.; Sun, J.; Shi, H.; Sun, Q. Spatial and temporal characteristics of wave engergy resources in the yellow sea and bohai sea using era5 datasets. Oceanol. Limnol. Sin. 2020, 51, 1350–1358. [Google Scholar]
- DNV. Column-Stabilized Units; Det Norske Veritas: Høvik, Norway, 2012. [Google Scholar]
- ABS. Rules for Building and Classing Mobile Offshore Drilling Unit; American Bureau of Shipping: Houston, TX, USA, 2016. [Google Scholar]
- CCS. Rules for the Classification of Mobile Offshore Units; China Communications Press: Beijing, China, 2023. [Google Scholar]
- CCS. Rules for the Classification of Floating Offshore Installations; China Communications Press: Beijing, China, 2023. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Factors | Levels | ||
|---|---|---|---|
| A (Bow width)/m | 6 | 7 | 8 |
| B (Length)/m | 69 | 75 | 81 |
| C (Width)/m | 21 | 23 | 25 |
| Condition | Type of Stress | Safety Coefficient | Condition | Type of Stress | Safety Coefficient |
|---|---|---|---|---|---|
| Static load condition | Axial and bending stress | 1.67 | Combined load conditions | Axial and bending stress | 1.25 |
| Shear stress | 2.50 | Shear stress | 1.88 | ||
| Composite stress | 1.43 | Composite stress | 1.11 |
| Material | Parameters | Value | Material | Parameters | Value |
|---|---|---|---|---|---|
| Q345 steel | Yield strength | 345 MPa | HDPE | Yield strength | 30 MPa |
| Density | 7850 kg/m3 | Density | 953 kg/m3 | ||
| Young’s modulus | 2.1 × 105 MPa | Young’s modulus | 9.0 × 102 MPa | ||
| Poisson’s ratio | 0.3 | Poisson’s ratio | 0.38 |
| Number of Mooring Line | Material | Diameter /mm | Dry Weight /(kg/m) | Wet Weight /(kg/m) | Axial Stiffness /kN | Fracture Tension /kN |
|---|---|---|---|---|---|---|
| Mooring lines 1–2 | Stud chain | 70 | 107.3 | 93.2 | 4.95 × 105 | 3687.9 |
| Mooring line 3 | Stud chain | 100 | 219.0 | 190.2 | 1.01 × 106 | 7056.0 |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Length overall | 77.5 m | Breadth extreme | 27.5 m |
| Length of netting | 22.8 m | Width of netting | 19.2 m |
| Height of netting | 8 m | Height of main structure | 2.3 m |
| Designed draught | 1.07 m | Scantling draught | 1.4 m |
| Length of floats | 2 m | Width of floats | 0.8 m |
| Height of floats | 1.4 m | Buoyancy of floats | 152.144 m3 |
| Mass of floats | 10.404 t | Total weight | 328.084 t |
| Center of gravity | (−1.085 m, 0 m, 1.238 m) | Ixx | 3.720 × 107 kg·m2 |
| Iyy | 1.759 × 108 kg·m2 | Izz | 2.114 × 108 kg·m2 |
| Number | A Bow Width/m | B Length/m | C Width/m | Heave /m | Pitch /° | Perimeter /m | Area /m2 | Cost Coefficient |
|---|---|---|---|---|---|---|---|---|
| 1 | 6 | 69 | 21 | 0.774 | 3.402 | 171.220 | 1392.750 | 0.123 |
| 2 | 6 | 75 | 23 | 0.719 | 1.620 | 186.040 | 1652.750 | 0.113 |
| 3 | 6 | 81 | 25 | 0.684 | 1.932 | 200.880 | 1934.750 | 0.104 |
| 4 | 7 | 69 | 23 | 0.741 | 1.767 | 174.540 | 1523.000 | 0.115 |
| 5 | 7 | 75 | 25 | 0.740 | 0.765 | 189.460 | 1794.000 | 0.106 |
| 6 | 7 | 81 | 21 | 0.645 | 2.672 | 195.800 | 1652.000 | 0.119 |
| 7 | 8 | 69 | 25 | 0.768 | 1.830 | 178.040 | 1652.750 | 0.108 |
| 8 | 8 | 75 | 21 | 0.727 | 0.873 | 184.380 | 1532.750 | 0.120 |
| 9 | 8 | 81 | 23 | 0.670 | 2.316 | 199.220 | 1806.750 | 0.110 |
| Conditions | Characteristic Loads | Conditions | Characteristic Loads |
|---|---|---|---|
| LC1 | Vertical shear at y = −10 m | LC5 | Vertical shear at x = 18.75 m |
| LC2 | Bending moment at y = 0 m | LC6 | Vertical bending moment at x = 3.75 m |
| LC3 | Horizontal shear at y = 1.25 m | LC7 | Torsion at x = 0 m |
| LC4 | Horizontal bending moment at y = −12.5 m | LC8 | Horizontal bending moment at x = 0 m |
| Conditions | Wave Direction /° | Frequency /(rad/s) | Forecast Extremums | Phase /° | Wave Height /m |
|---|---|---|---|---|---|
| LC1 | 90 | 1.4 | 4.94 × 105 N | 150.83 | 3.485 |
| LC2 | 90 | 1.4 | 4.10 × 106 N·m | −9.56 | 3.944 |
| LC3 | 135 | 1.9 | 7.11 × 104 N | 0 | 1.398 |
| LC4 | 75 | 1.3 | 4.26 × 106 N·m | −69.14 | 2.366 |
| LC5 | 180 | 0.95 | 8.35 × 105 N | −22.66 | 3.956 |
| LC6 | 180 | 0.9 | 1.55 × 107 N·m | 161.74 | 3.871 |
| LC7 | 75 | 1.4 | 1.18 × 107 N·m | −32.93 | 3.156 |
| LC8 | 75 | 1.6 | 9.79 × 105 N·m | 105.79 | 1.605 |
| Conditions | Characteristic Load | Main Frame | Bulkhead | Floor | Girder | Longitudinal | Float Shell |
|---|---|---|---|---|---|---|---|
| LC1 | Vertical shear at y = −10 m | 65.4 | 12.2 | 20.9 | 28.4 | 12.0 | 1.10 |
| LC2 | Bending moment at y = 0 m | 75.8 | 19.6 | 24.6 | 45.4 | 49.3 | 1.27 |
| LC3 | Horizontal shear at y = 1.25 m | 58.8 | 13.1 | 24.2 | 25.5 | 27.7 | 0.68 |
| LC4 | Horizontal bending moment at y = −12.5 m | 140 | 44.3 | 31.7 | 39.9 | 47.4 | 0.88 |
| LC5 | Vertical shear at x = 18.75 m | 267 | 71.7 | 70.9 | 181 | 187 | 1.24 |
| LC6 | Vertical bending moment at x = 3.75 m | 297 | 78.4 | 78.4 | 201 | 208 | 1.18 |
| LC7 | Torsion at x = 0 m | 243 | 72.1 | 52.6 | 79.2 | 84.3 | 1.10 |
| LC8 | Horizontal bending moment at x = 0 m | 82.5 | 14.0 | 29.8 | 30.4 | 34.0 | 0.70 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Zhen, X.; Zhu, Y.; Huang, Y.; Zhang, L.; Li, H. Conceptual Design and Structural Performance Analysis of an Innovative Deep-Sea Aquaculture Platform. J. Mar. Sci. Eng. 2024, 12, 1058. https://doi.org/10.3390/jmse12071058
Li Y, Zhen X, Zhu Y, Huang Y, Zhang L, Li H. Conceptual Design and Structural Performance Analysis of an Innovative Deep-Sea Aquaculture Platform. Journal of Marine Science and Engineering. 2024; 12(7):1058. https://doi.org/10.3390/jmse12071058
Chicago/Turabian StyleLi, Yangyang, Xingwei Zhen, Yesen Zhu, Yi Huang, Lixin Zhang, and Hongxia Li. 2024. "Conceptual Design and Structural Performance Analysis of an Innovative Deep-Sea Aquaculture Platform" Journal of Marine Science and Engineering 12, no. 7: 1058. https://doi.org/10.3390/jmse12071058
APA StyleLi, Y., Zhen, X., Zhu, Y., Huang, Y., Zhang, L., & Li, H. (2024). Conceptual Design and Structural Performance Analysis of an Innovative Deep-Sea Aquaculture Platform. Journal of Marine Science and Engineering, 12(7), 1058. https://doi.org/10.3390/jmse12071058