
Risk Performance Analysis on Navigation of MASS via a Hybrid Framework of STPA and HMM: Evidence from the Human–Machine Co-Driving Mode


Abstract
1. Introduction
- The model will be utilized to conduct a risk-based comparison of MASS navigation in specific scenarios. By comparing the dynamic evolution process of ship navigation risks under different NCMs, it can offer valuable insights for operators and regulatory authorities involved in monitoring and managing maritime traffic to select suitable NCMs.
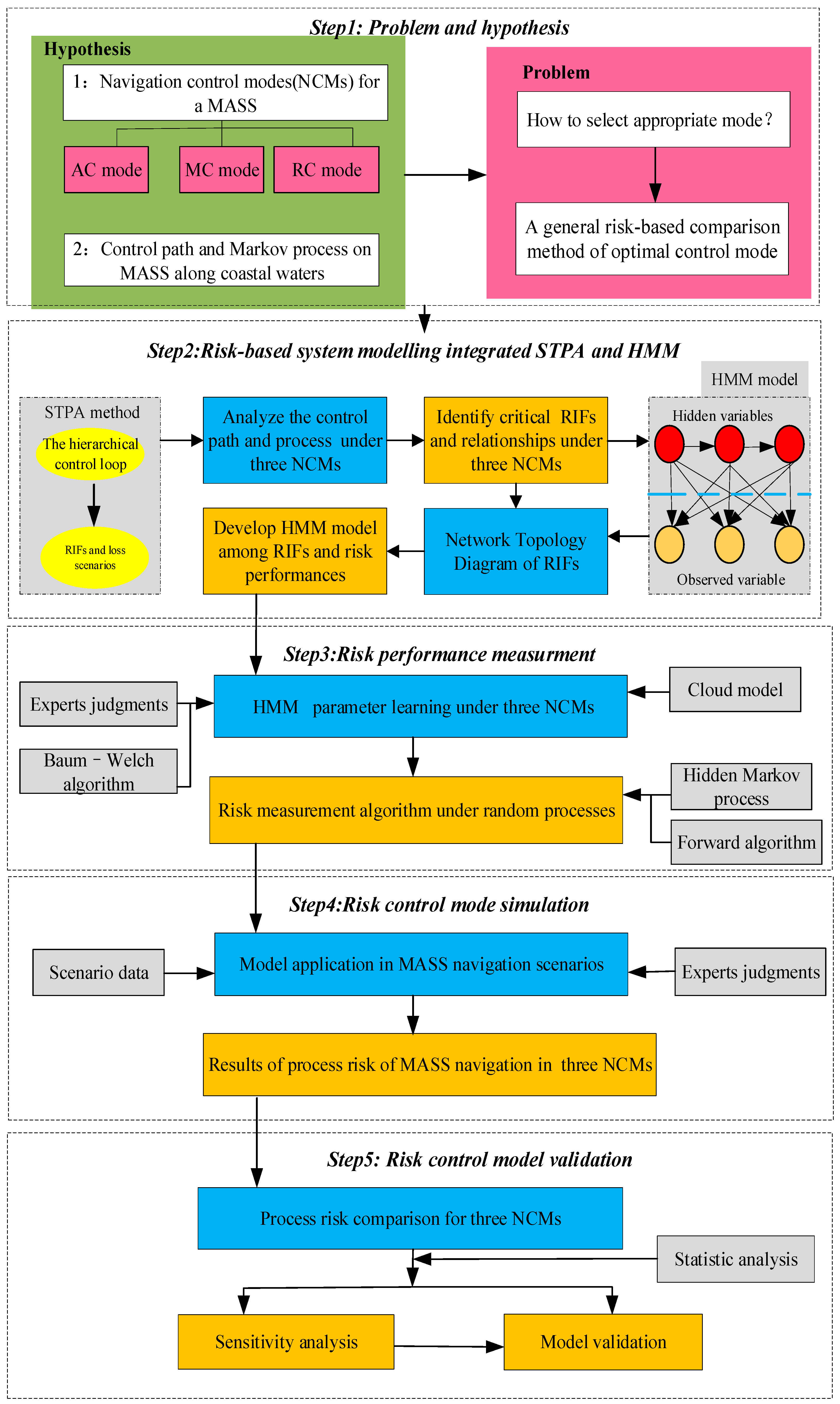
- To accomplish this objective, this article extensively leverages the robust modeling capabilities of STPA and HMM. From the perspective of system safety control paths and processes, the STPA method is employed to analyze the composition and interrelation of risk factors under three NCMs while identifying the most representative observation factors as input variables for the HMM.
- By organically integrating STPA and HMM, it unveils the changing patterns in hidden states of process risk associated with MASS under three NCMs, thereby laying a theoretical foundation for a more scientific and comprehensive understanding of MASS navigation risks.
2. Methodology
2.1. Framework and Approach
2.1.1. Conceptual Framework of Approach
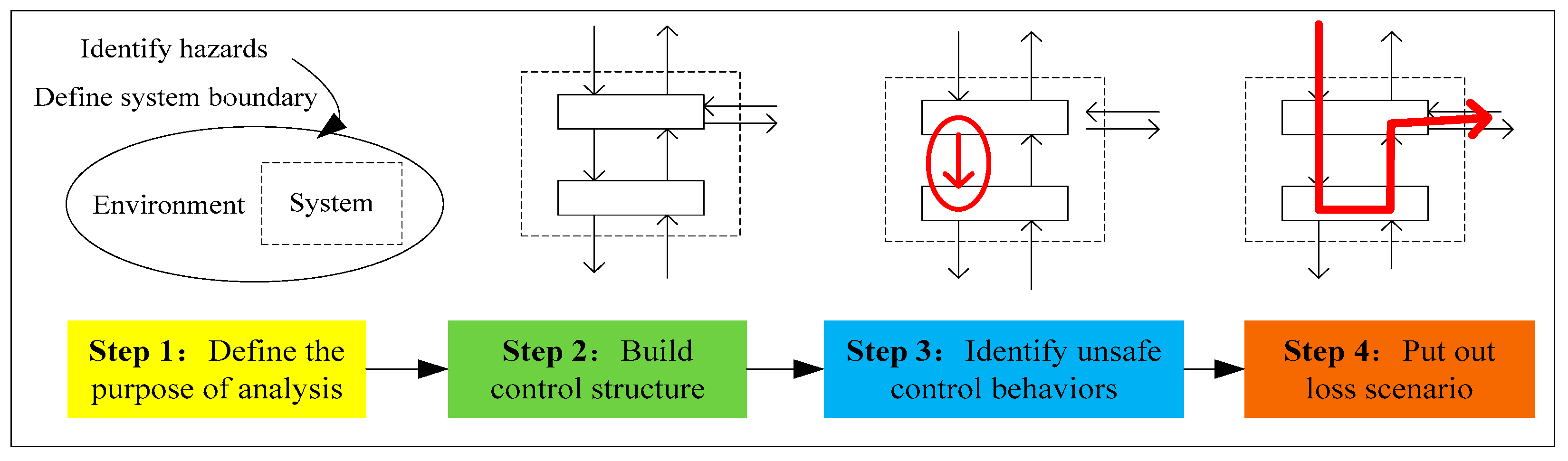
2.1.2. The STPA Method
- (a)
- Failure to provide necessary safety control actions (or providing correct control instructions that are not implemented);
- (b)
- Provision of incorrect or unsafe control behavior;
- (c)
- Delay in executing the correct control behavior;
- (d)
- Execution of the correct control behavior at an inappropriate time, resulting in premature or delayed action.
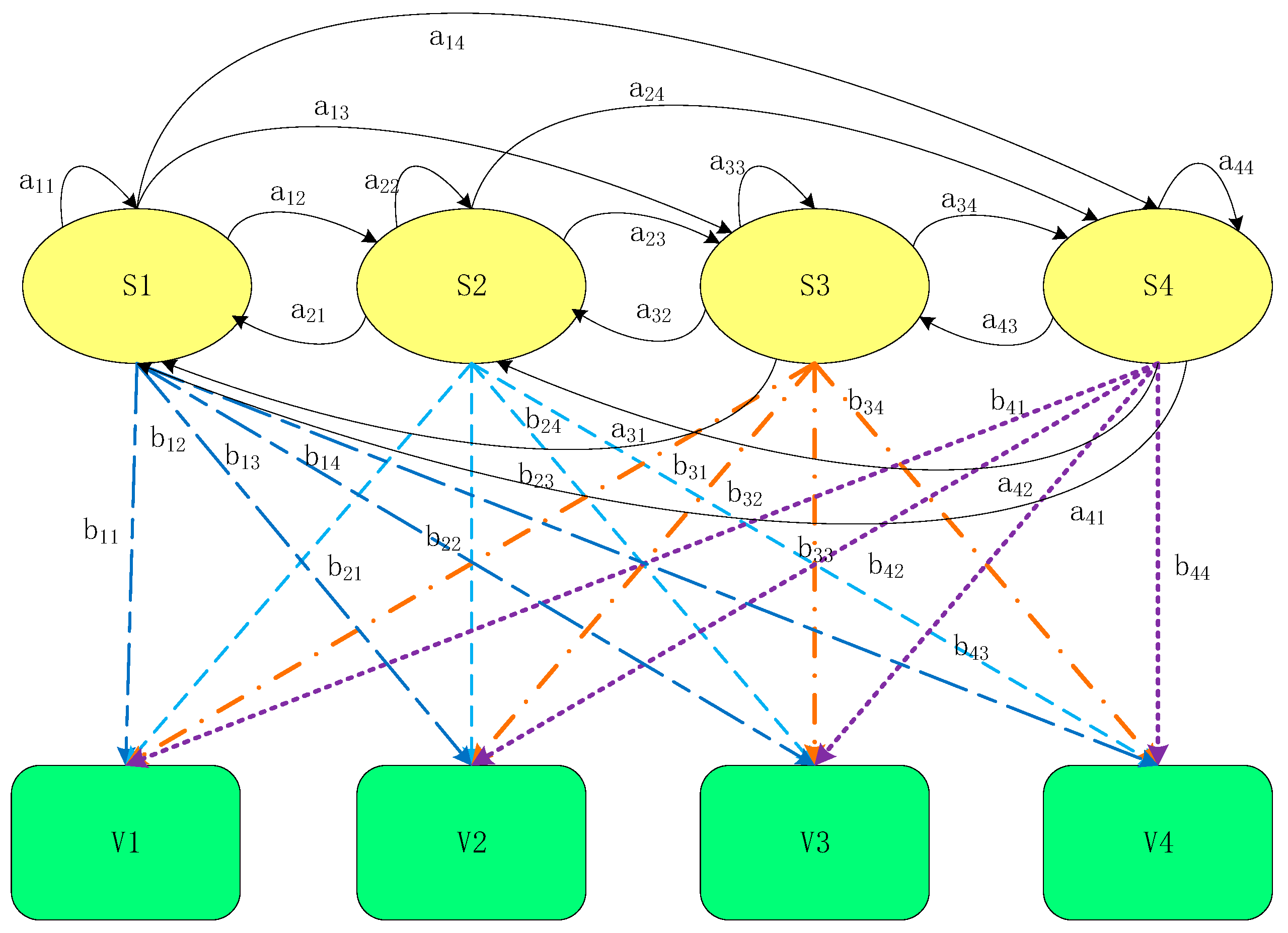
2.1.3. Hidden Markov Models
- (1)
- N: set of N states in a model, represent a collection of finite states, which are not visible and cannot be measured directly.
- (2)
- M: number of observations that can be obtained, V = {v1, v2, …, vM} represent a collection of all possible observation.
- (3)
- : initial probability distribution over states vector, where:
- (4)
- A: the probability distribution of the state transition, which is given by:
- (5)
- B: observation likelihood matrix, which is given by:
- (1)
- Given a model and an observation sequence, , to compute the probability of this model to produce an observation sequence .
- (2)
- Given an observation sequence and a model , to find the optimal state sequence .
- (3)
- Given a set of observation sequences , the model parameters that realize this training set at the highest rate is for the calculation of .
2.2. Process Risk Control Modes of MASS Navigation Safety (Stage 1)
2.3. Risk-Based System Modelling with STPA and HMM (Stage 2)
- (1)
- RIFs identification in three NCMs
- (2)
- Develop HMM among the RIFs
2.4. The Risk Performance Measurement Algorithm (Stage 3)
- (1)
- Define the forward variable :
- (2)
- Initialization:
- (3)
- Recursion:
- (4)
- Termination:
2.5. Risk Control Mode Simulation and Analysis (Stage 4 and Stage 5)
3. Results
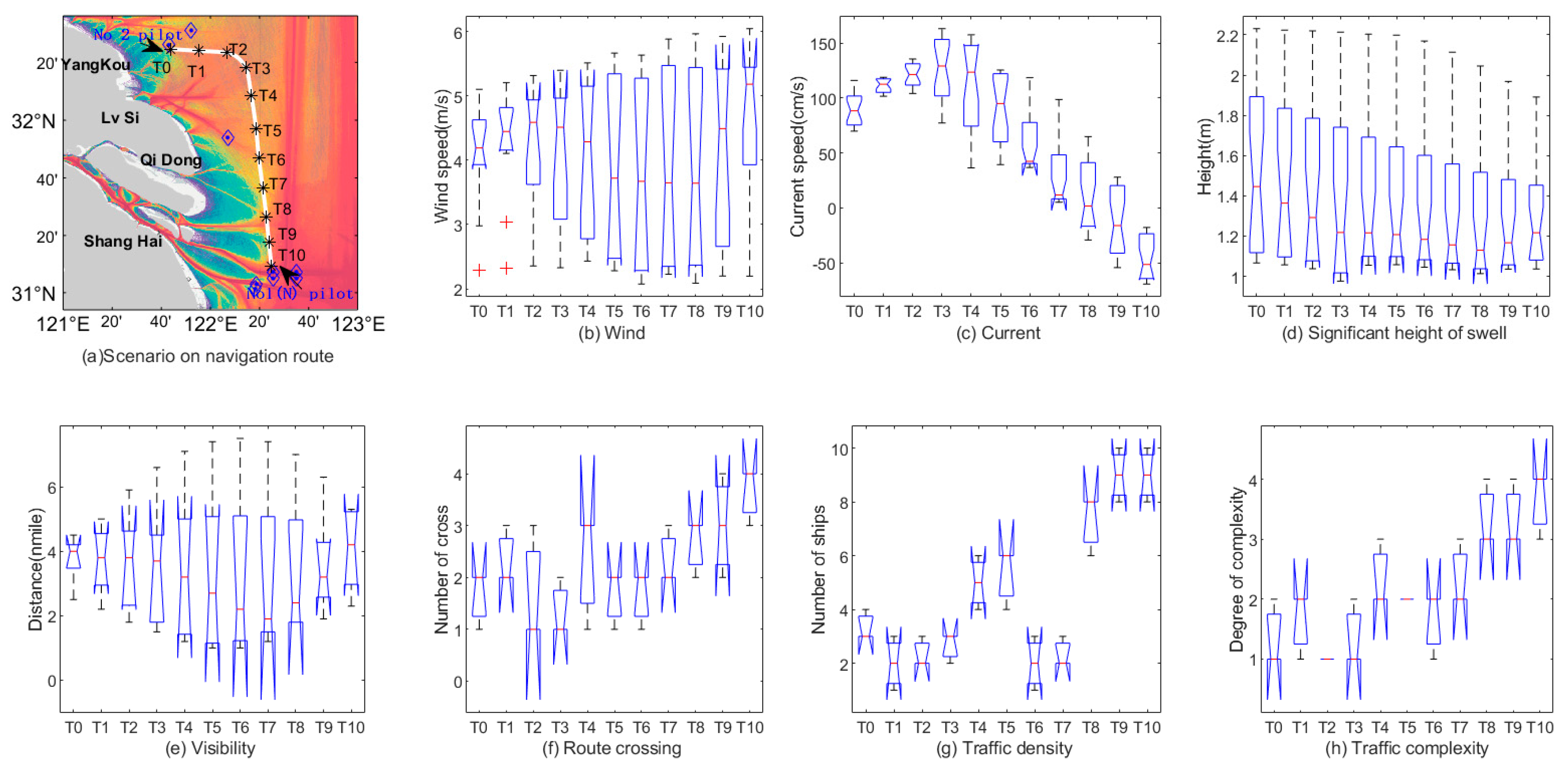
3.1. Scenario and Data
3.1.1. Scenario for the Ship–Shore Synergy Mode of MASS
3.1.2. RIFs Identification in Three NCMs
- UCA-1: Not provide control actions to adjust speed and course.
- UCA-2: Provide incorrect or unsafe control actions to adjust speed and course.
- UCA-3: Provide control actions to adjust speed and course at incorrect time.
- UCA-4: Provide control actions to adjust speed and course with incorrect duration.
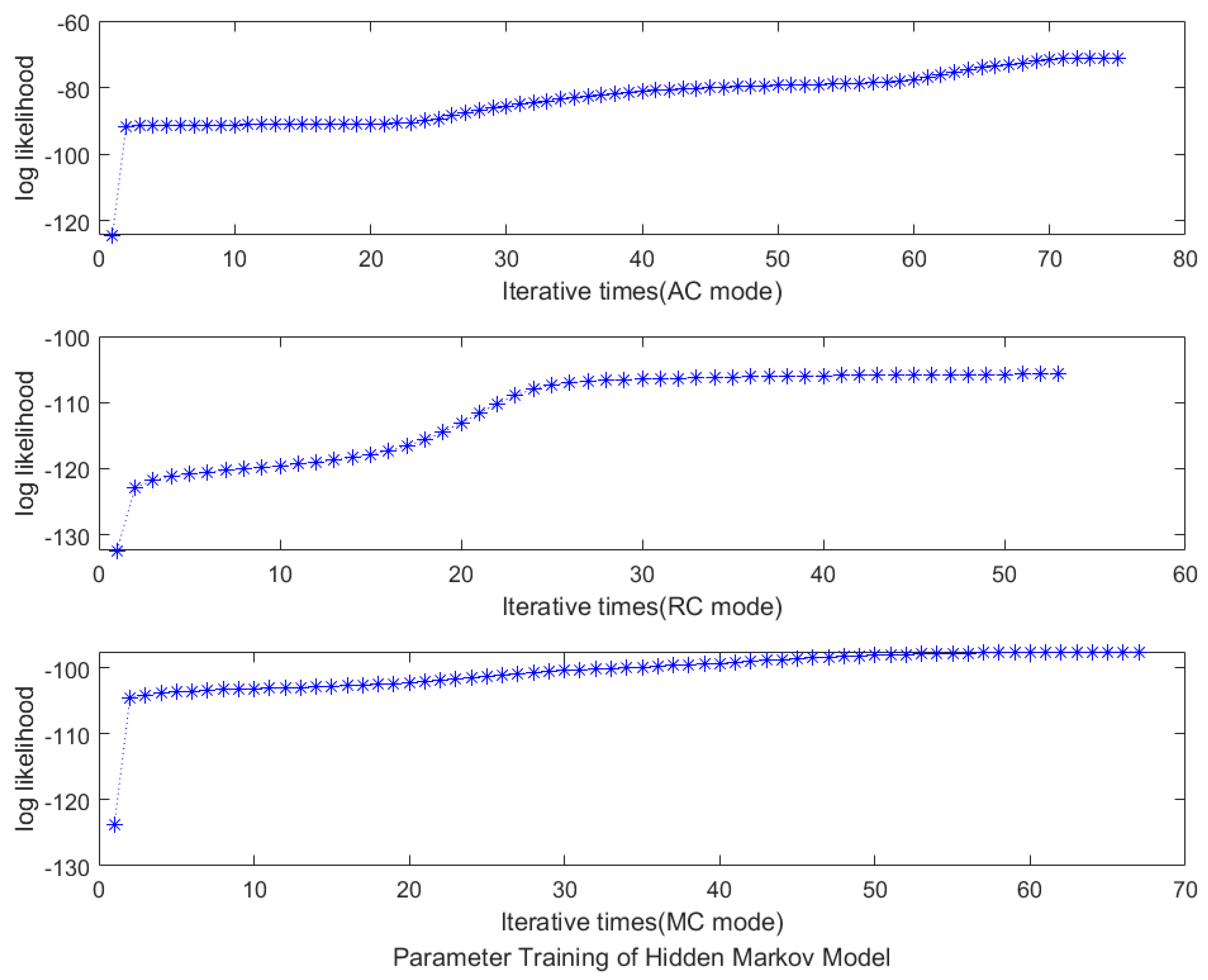
3.1.3. HMM Parameter Learning
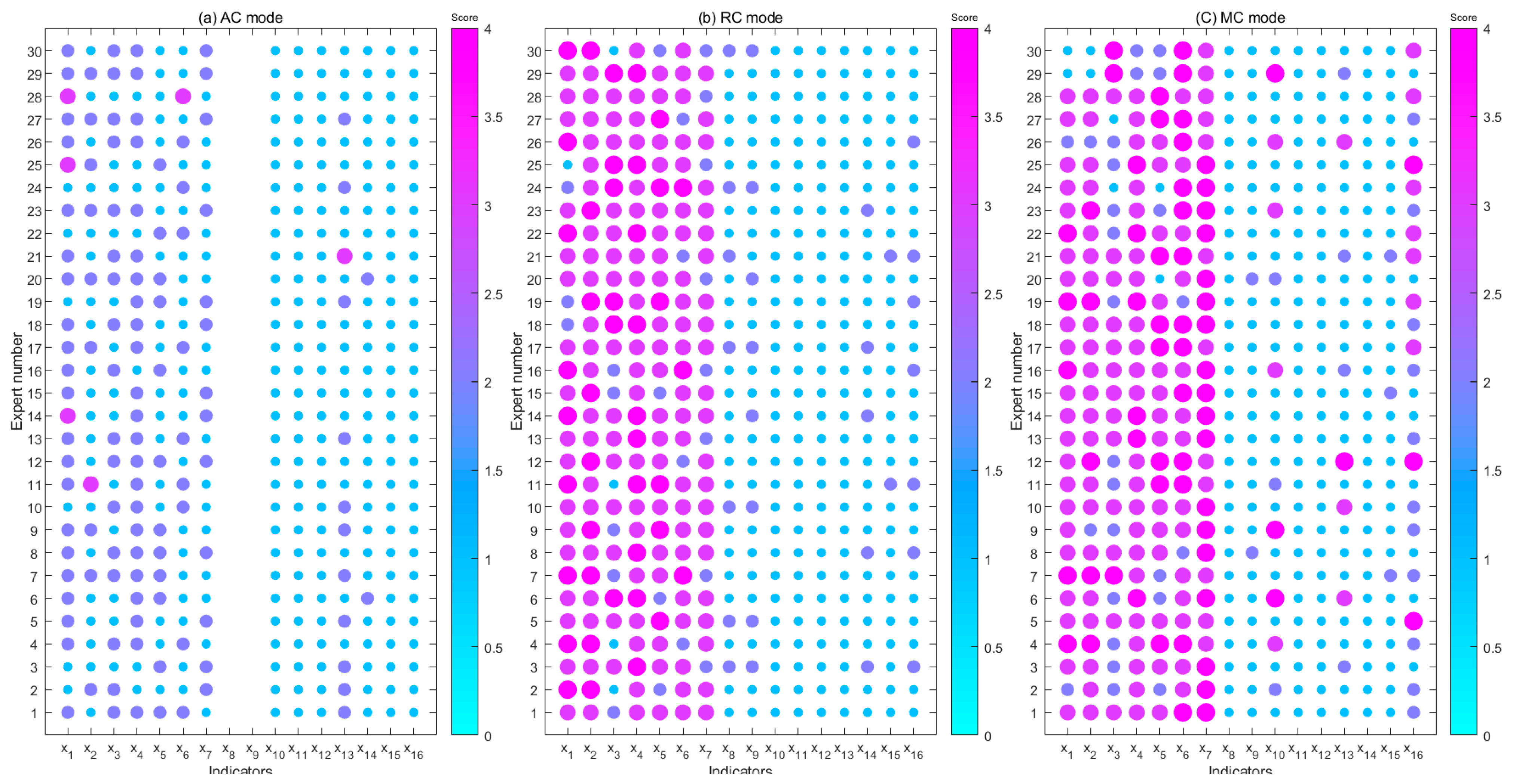
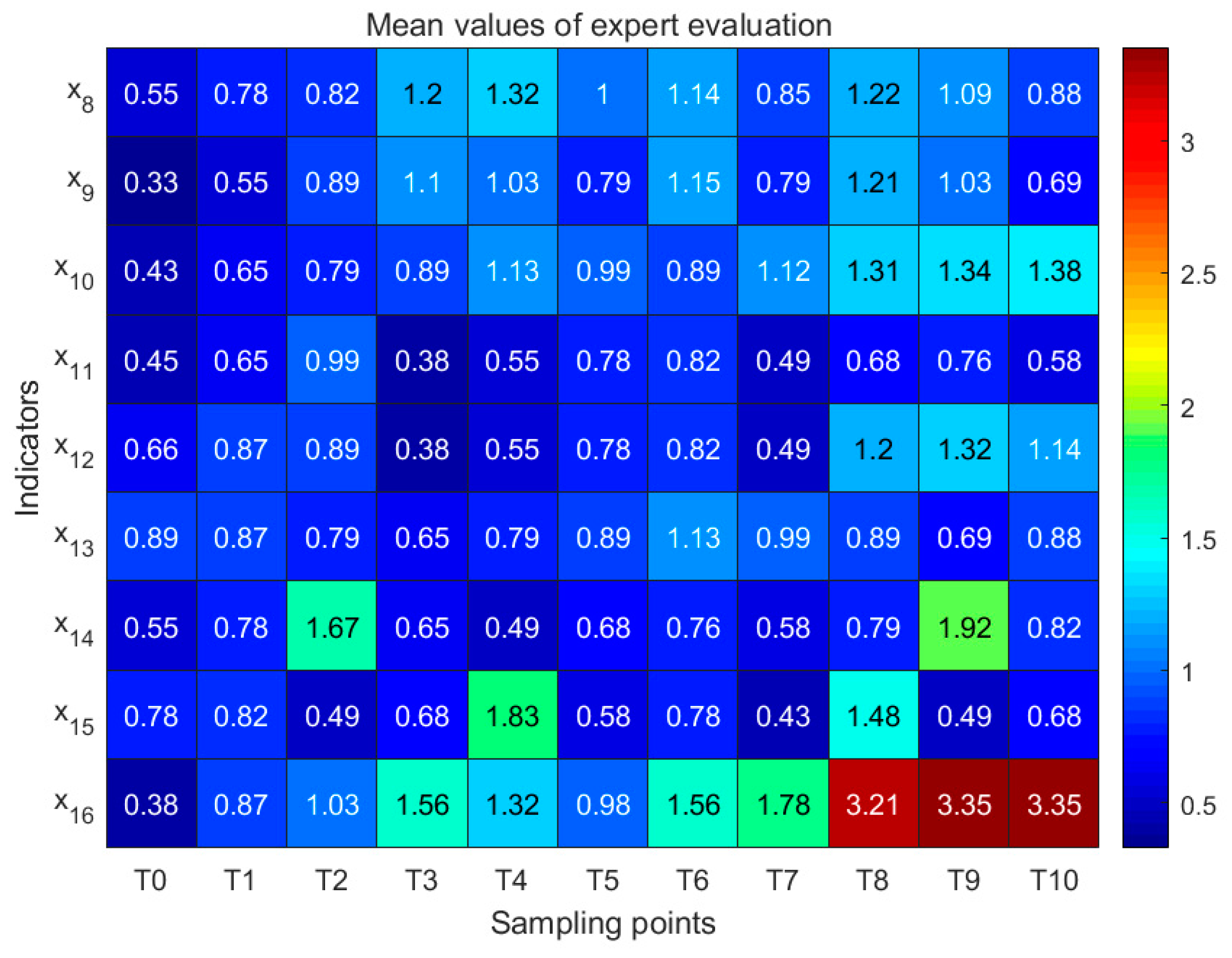
3.1.4. Quantification Processing of RIFs
- Acquisition and quantification of objective data
- Acquisition and quantification of subjective data
3.2. Risk Performance Comparison in Open Sea Area
3.3. Risk Performance Comparison in Complex Water Area
3.4. Sensitivity Analysis and Model Verification
4. Discussions
4.1. Risk Performance from the Ship–Shore Synergy Mode of MASS
- (1)
- In waters with lower external environmental risks, the process risk of MASS navigation for three NCMs are at a lower level (as shown in Figure 9 and Figure 10 T0–T2), and R (AC) > R (MC) > R (RC). Speaking to the risk fluctuation amplitude, the AC mode was the most stable, while the MC mode was the most volatile. Therefore, in open waters with good external environments, the AC mode or the RC mode is the most appropriate choice, and can minimize the impact of human factors and control the risk at an acceptable level. Of course, the following conditions are required to support the two modes. The ship’s sensing system (i.e., radar, AIS, CCTV) and decision-making system (virtual captain) are in good working condition, relevant sensors have sufficient redundancy design, and the control algorithm has good reliability and robustness. At the same time, ship–shore communication has enough bandwidth to transmit data in real time.
- (2)
- In waters with relatively complex external navigation environments, there were significant differences in process risks under the three NCMs. In the AC mode, due to environmental risks exceeding the preset threshold at some segments (T2–T4 and T8–T10), the process risk of MASS navigation reached the maximum. Therefore, it is a highly challenging task to scientifically and comprehensively understand the formation mechanism of autonomous ship risks, and on this basis, reasonably define the preset scenarios for autonomous ship operation.
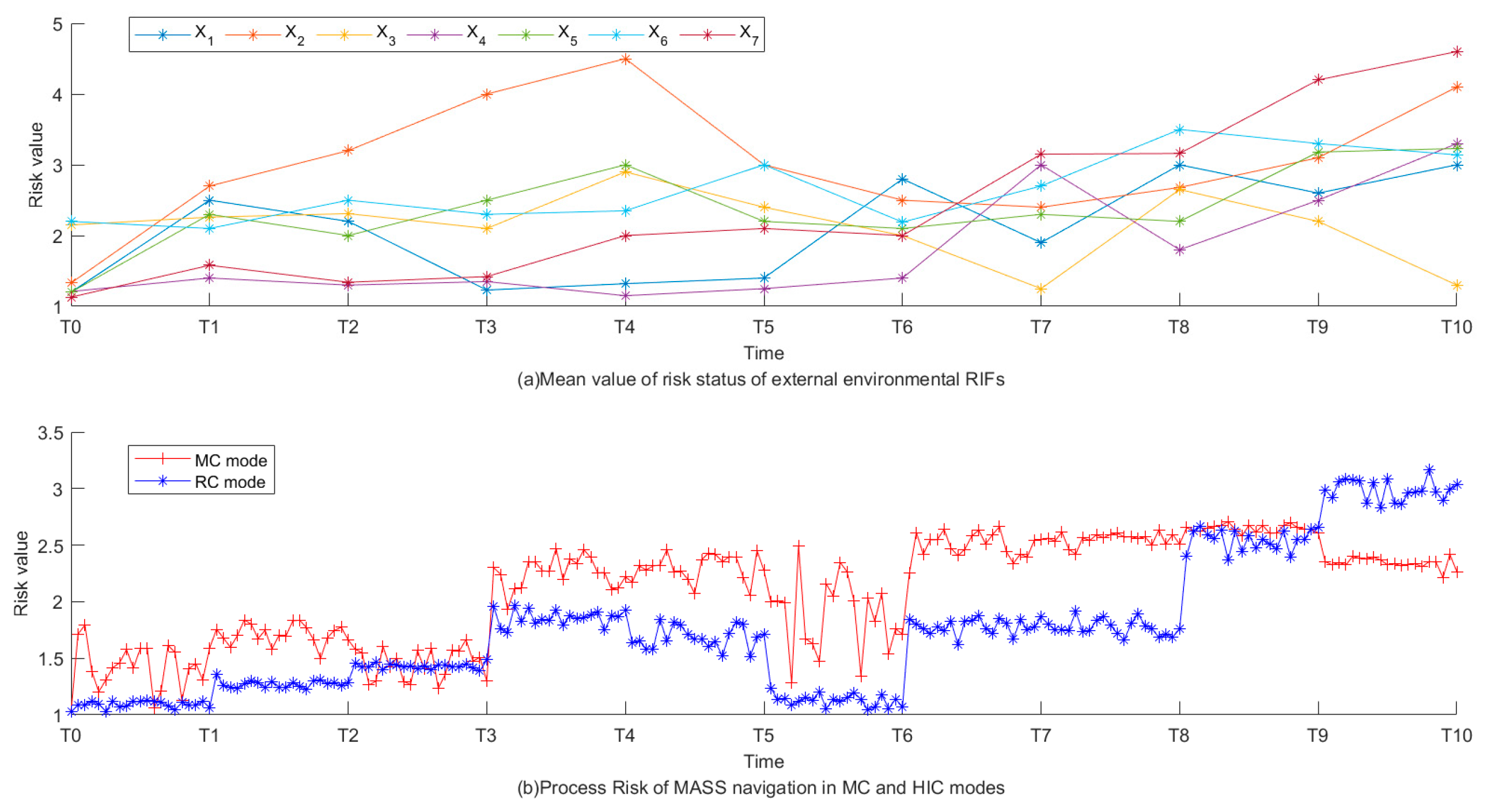
- (3)
- It can well adapt to the changes in environmental risks both in the MC mode and the RC mode. The RC mode had a smaller magnitude and fluctuation of navigation risk performances at segments T0–T8, but at segment T9–T10, there was a sharp increase and reached the R3 level. In comparison, the risk of ship navigation always fluctuates at the R2 level in the MC mode, and the risk performance values are greater. However, at segment T9–T10, it can effectively suppress the increasing trend of risk and kept at the R2 level. Based on comprehensive analysis, it can be concluded that in waters with complex environments, the RC mode is more suitable, which can keep the risk of ship navigation at a lower level. However, in emergency situations, direct control by crews on board is still the most effective method, and the MC mode is the most suitable for more complex or unexpected segments.
- (4)
- Based on the evolution trend of process risk, we believe that the AC mode and the RC mode should be the appropriate choice to ensure the safe navigation of MASS in coastal waters. Of course, how to choose between the two modes also depends on the risk tolerance of ship operators and the foresight of designers for preset scenarios. Even if this selection is feasible based on risk assessment, the timing of mode switching still depends on the definition of acceptable criteria, However, universally accepted criteria to measure the navigational risk for MASS are still open question. In addition, how to choose the appropriate NCM for MASS may be a multi-attribute problem, as this selection can not only consider the results of navigation risk comparison, but also other aspects, e.g., the availability of ship RCC communication and the physical and mental state of operators. Moreover, in some cases, the proposed NCM should comply with mandatory rules of the coastal or port country, if any [14].
- (5)
- In terms of the adaptability of the three NCMs to external environmental risks, the AC mode has the strictest standards, followed by the RC and MC standards, which may provide insights into the formulation of future risk acceptance standards for MASS. In specific navigation tasks, the feasibility of switching the three NCMs needs to be further discussed. The MC or RC mode switching to the AC mode means that manual control is transformed into machine control. This situation is usually applicable to waters with R1 risk level, and the switching can be implemented only after the operator’s confirmation. Before this, operational risk needs to be evaluated. Switching from the AC mode to the RC or MC mode will be the main way for MASS to cope with external risks or emergencies in the future, which needs to be analyzed according to the actual situation, for example, when the ship loses GNSS signal and the remote communication is interrupted, it needs to be switched to the MC mode. The crew can solve this problem well according to their sailing experience, at least to keep the ship away from danger. Of course, when the ship deviates from the course or approaches the crowded area of ships, the RC mode is still the first option on the premise that the remote communication and sensing system are in good condition. After all, the MC mode is only an option for emergency treatment. Finally, a very important task is how to solve the problem of early warning of navigational risks of MASS. The challenge here is to ensure sufficient time margin, because both the operator onshore and the crew onboard need some time to adapt to mode switching or role switching.
4.2. Permit of Framework via STPA-HMM
4.2.1. Risk Performance Model Considering System Control
4.2.2. Process Risk Assessment via STPA-HMM
4.3. Limitations of Framework via STPA-HMM
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AC | Autonomous Control |
| AIS | Automatic Identification System |
| CCTV | Closed Circuit Television |
| ECDIS | Electronic Chart Display and Information System |
| FMEA | Failure Modes and Effects Analysis |
| FSA | Formal Safety Assessment |
| GMDSS | Global Maritime Distress and Safety System |
| GNSS | Global Navigation Satellite System |
| HMM | Hidden Markov Model |
| HZAOP | Hazard and Operability Analysis |
| IMO | International Maritime Organization |
| MASS | Maritime Autonomous Surface Ship |
| MC | Manual Control |
| NCMs | Navigation Control Modes |
| RIFs | Risk Influencing Factors |
| RC | Remote Control |
| SAC | Shipboard Autonomous Controller |
| SCC | Shore-based Control Center |
| STAMP | System-Theoretic Accident Modeling and Processes |
| STPA | System-Theoretic Process Analysis |
| UCAs | Unsafe Control Actions |
References
- Rødseth, Ø.J.; Burmeister, H.-C. Risk Assessment for an Unmanned Merchant Ship. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2015, 9, 357–364. [Google Scholar] [CrossRef]
- Wróbel, K.; Montewka, J.; Kujala, P. Towards the development of a system-theoretic model for safety assessment of autonomous merchant vessels. Reliab. Eng. Syst. Saf. 2018, 178, 209–224. [Google Scholar] [CrossRef]
- Munim, Z.H. Autonomous ships: A review, innovative applications and future maritime business models. Supply Chain Forum Int. J. 2019, 20, 266–279. [Google Scholar] [CrossRef]
- Goerlandt, F. Maritime Autonomous Surface Ships from a risk governance perspective: Interpretation and implications. Saf. Sci. 2020, 128, 104758. [Google Scholar] [CrossRef]
- Shaobo, W.; Yingjun, Z.; Lianbo, L. A collision avoidance decision-making system for autonomous ship based on modified velocity obstacle method. Ocean Eng. 2020, 215, 107910. [Google Scholar] [CrossRef]
- Chang, C.-H.; Kontovas, C.; Yu, Q.; Yang, Z. Risk assessment of the operations of maritime autonomous surface ships. Reliab. Eng. Syst. Saf. 2021, 207, 107324. [Google Scholar] [CrossRef]
- Guo, C.; Utne, I.B. Development of risk indicators for losing navigational control of autonomous ships. Ocean Eng. 2022, 266, 113204. [Google Scholar] [CrossRef]
- Lee, E.; Khan, J.; Son, W.-J.; Kim, K. An Efficient Feature Augmentation and LSTM-Based Method to Predict Maritime Traffic Conditions. Appl. Sci. 2023, 13, 2556. [Google Scholar] [CrossRef]
- Lee, E.; Khan, J.; Zaman, U.; Ku, J.; Kim, S.; Kim, K. Synthetic Maritime Traffic Generation System for Performance Verification of Maritime Autonomous Surface Ships. Appl. Sci. 2024, 14, 1176. [Google Scholar] [CrossRef]
- Wróbel, K.; Montewka, J.; Kujala, P. System-theoretic approach to safety of remotely-controlled merchant vessel. Ocean Eng. 2018, 152, 334–345. [Google Scholar] [CrossRef]
- IMO. Interim Guidelines for Maritime Autonomous Surface Ship Trials Approved. Maritime Safety Committee. Available online: https://www.imo.org/en/MediaCentre/MeetingSummaries/Pages/MSC-101st-session.aspx (accessed on 5 June 2023).
- Hoem, Å.S.; Fjortoft, K.; Rødseth, Ø.J. Addressing the Accidental Risks of Maritime Transportation: Could Autonomous Shipping Technology Improve the Statistics? TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2019, 13, 487–494. [Google Scholar] [CrossRef]
- IMO. IMO Takes First Steps to Address Autonomous Ships. Available online: https://www.imo.org/en/MediaCentre/PressBriefings/Pages/08-MSC-99-MASS-scoping.aspx (accessed on 25 May 2018).
- Fan, C.; Montewka, J.; Zhang, D. A risk comparison framework for autonomous ships navigation. Reliab. Eng. Syst. Saf. 2022, 226, 108709. [Google Scholar] [CrossRef]
- Bolbot, V.; Theotokatos, G.; Wennersberg, L.A. A method to identify and rank objects and hazardous interactions affecting autonomous ships navigation. J. Navig. 2022, 75, 572–593. [Google Scholar] [CrossRef]
- Chen, P.; Huang, Y.; Mou, J.; van Gelder, P.H.A.J.M. Probabilistic risk analysis for ship-ship collision: State-of-the-art. Saf. Sci. 2019, 117, 108–122. [Google Scholar] [CrossRef]
- Thieme, C.A.; Utne, I.B. Safety performance monitoring of autonomous marine systems. Reliab. Eng. Syst. Saf. 2017, 159, 264–275. [Google Scholar] [CrossRef]
- Man, Y.; Lundh, M.; Porathe, T.; MacKinnon, S. From Desk to Field—Human Factor Issues in Remote Monitoring and Controlling of Autonomous Unmanned Vessels. Procedia Manuf. 2015, 3, 2674–2681. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, D.; Yao, H.; Zhang, K. A probabilistic model of human error assessment for autonomous cargo ships focusing on human–autonomy collaboration. Saf. Sci. 2020, 130, 104838. [Google Scholar] [CrossRef]
- Fan, C.; Montewka, J.; Zhang, D. Towards a Framework of Operational-Risk Assessment for a Maritime Autonomous Surface Ship. Energies 2021, 14, 3879. [Google Scholar] [CrossRef]
- Chou, C.-C.; Wang, C.-N.; Hsu, H.-P. A novel quantitative and qualitative model for forecasting the navigational risks of Maritime Autonomous Surface Ships. Ocean Eng. 2022, 248, 110852. [Google Scholar] [CrossRef]
- Wróbel, K.; Montewka, J.; Kujala, P. Towards the assessment of potential impact of unmanned vessels on maritime transportation safety. Reliab. Eng. Syst. Saf. 2017, 165, 155–169. [Google Scholar] [CrossRef]
- Fan, C.; Wróbel, K.; Montewka, J.; Gil, M.; Wan, C.; Zhang, D. A framework to identify factors influencing navigational risk for Maritime Autonomous Surface Ships. Ocean Eng. 2020, 202, 107188. [Google Scholar] [CrossRef]
- Ahvenjärvi, S. The Human Element and Autonomous Ships. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2016, 10, 517–521. [Google Scholar] [CrossRef]
- Saha, R. Mapping competence requirements for future shore control center operators. Marit. Policy Manag. 2021, 50, 415–427. [Google Scholar] [CrossRef]
- Yoshida, M.; Shimizu, E.; Sugomori, M.; Umeda, A. Identification of the Relationship between Maritime Autonomous Surface Ships and the Operator’s Mental Workload. Appl. Sci. 2021, 11, 2331. [Google Scholar] [CrossRef]
- Wang, K.; Xiong, L.; Xue, R. Real-time data stream learning for emergency decision-making under uncertainty. Phys. A Stat. Mech. Its Appl. 2024, 633, 129429. [Google Scholar] [CrossRef]
- Leveson, N. A new accident model for engineering safer systems. Saf. Sci. 2004, 42, 237–270. [Google Scholar] [CrossRef]
- Zhou, X.-Y.; Liu, Z.-J.; Wang, F.-W.; Wu, Z.-L.; Cui, R.-D. Towards applicability evaluation of hazard analysis methods for autonomous ships. Ocean Eng. 2020, 214, 107773. [Google Scholar] [CrossRef]
- Thieme, C.A.; Utne, I.B.; Haugen, S. Assessing ship risk model applicability to Marine Autonomous Surface Ships. Ocean Eng. 2018, 165, 140–154. [Google Scholar] [CrossRef]
- Banda, O.A.V.; Kannos, S.; Goerlandt, F.; van Gelder, P.H.A.J.M.; Bergström, M.; Kujala, P. A systemic hazard analysis and management process for the concept design phase of an autonomous vessel. Reliab. Eng. Syst. Saf. 2019, 191, 106584. [Google Scholar] [CrossRef]
- Wu, J.; Hu, S.; Jin, Y.; Fei, J.; Fu, S. Performance Simulation of the Transportation Process Risk of Bauxite Carriers Based on the Markov Chain and Cloud Model. J. Mar. Sci. Eng. 2019, 7, 108. [Google Scholar] [CrossRef]
- Li, W.; Chen, W.; Hu, S.; Xi, Y.; Guo, Y. Risk evolution model of marine traffic via STPA method and MC simulation: A case of MASS along coastal setting. Ocean Eng. 2023, 281, 114673. [Google Scholar] [CrossRef]
- Saldanha, M.C.W.; de Carvalho, R.J.M.; Arcuri, R.; Amorim, A.G.; Vidal, M.C.R.; Carvalho, P.V.R.D. Understanding and improving safety in artisanal fishing: A safety-II approach in raft fishing. Saf. Sci. 2020, 122, 104522. [Google Scholar] [CrossRef]
- de Carvalho, D.F.; Kaymak, U.; Van Gorp, P.; van Riel, N. A Markov model for inferring event types on diabetes patients data. Healthc. Anal. 2022, 2, 100024. [Google Scholar] [CrossRef]
- Hassan, M.R.; Ramamohanarao, K.; Kamruzzaman, J.; Rahman, M.; Hossain, M.M. A HMM-based adaptive fuzzy inference system for stock market forecasting. Neurocomputing 2013, 104, 10–25. [Google Scholar] [CrossRef]
- Wang, X.; Liu, J.; Moore, S.J.; Nugent, C.D.; Xu, Y. A behavioural hierarchical analysis framework in a smart home: Integrating HMM and probabilistic model checking. Inf. Fusion 2023, 95, 275–292. [Google Scholar] [CrossRef]
- Salawudeen, A.T.; Mu’azu, M.B.; Adedokun, E.A.; Baba, B.A. Optimal determination of hidden Markov model parameters for fuzzy time series forecasting. Sci. Afr. 2022, 16, e01174. [Google Scholar] [CrossRef]
- Zheng, J.; Yu, D.; Zhu, B.; Tong, C. Learning hidden Markov models with unknown number of states. Phys. A Stat. Mech. Its Appl. 2022, 594, 127047. [Google Scholar] [CrossRef]
- Zheng, X.; Zhang, D.; Gao, H.; Zhao, Z.; Huang, H.; Wang, J. A Novel Framework for Road Traffic Risk Assessment with HMM-Based Prediction Model. Sensors 2018, 18, 4313. [Google Scholar] [CrossRef] [PubMed]
- Xiong, X.; Chen, L.; Liang, J. A New Framework of Vehicle Collision Prediction by Combining SVM and HMM. IEEE Trans. Intell. Transp. Syst. 2018, 19, 699–710. [Google Scholar] [CrossRef]
- Zhu, K.; Zhao, X.; Zhang, L.; Yu, H. Research on aging-related degradation of control rod drive system based on dynamic object-oriented Bayesian network and hidden Markov model. Nucl. Eng. Technol. 2022, 54, 4111–4124. [Google Scholar] [CrossRef]
- Karaca, Y.; Baleanu, D.; Karabudak, R. Hidden Markov Model and multifractal method-based predictive quantization complexity models vis-á-vis the differential prognosis and differentiation of Multiple Sclerosis’ subgroups. Knowl. Based Syst. 2022, 246, 108694. [Google Scholar] [CrossRef]
- Nesdoly, A.; Bone, C.; Fraser, M.; Serra-Sogas, N.; Canessa, R. Evaluating models for classifying movement of whale-watching vessels. Ecol. Inform. 2023, 73, 101903. [Google Scholar] [CrossRef]
- Leveson, N. A systems approach to risk management through leading safety indicators. Reliab. Eng. Syst. Saf. 2015, 136, 17–34. [Google Scholar] [CrossRef]
- Burmeister, H.-C.; Bruhn, W.; Rødseth, Ø.J.; Porathe, T. Autonomous Unmanned Merchant Vessel and its Contribution towards the e-Navigation Implementation: The MUNIN Perspective. Int. J. e-Navig. Marit. Econ. 2014, 1, 1–13. [Google Scholar] [CrossRef]
- Wrobel, K.; Krata, P.; Montewka, J.; Hinz, T. Towards the Development of a Risk Model for Unmanned Vessels Design and Operations. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2016, 10, 267–274. [Google Scholar] [CrossRef]
- Hu, S.; Li, W.; Xi, Y.; Li, W.; Hou, Z.; Wu, J.; Han, B. Evolution pathway of process risk of marine traffic with the STAMP model and a genetic algorithm: A simulation of LNG-fueled vessel in-and-out harbor. Ocean Eng. 2022, 253, 111133. [Google Scholar] [CrossRef]
- MUNIN. Final Report Summary—MUNIN (Maritime Unmanned Navigation through Intelligence in Networks). European Commission. 2016. Available online: https://cordis.europa.eu/project/id/314286/reporting (accessed on 4 April 2016).
- AAWA. Remote and autonomous surface ships the next steps. In Report of the Andvanced Autonomous Waterbone Applications (AAWA) Initiative Project. 2016. Available online: https://www.rolls-royce.com/~/media/Files/R/Rolls-Royce/documents/customers/marine-/ship-intel/aawa-whitepaper-210616.pdf (accessed on 24 October 2016).
- Zhou, X.-Y.; Liu, Z.-J.; Wang, F.-W.; Wu, Z.-L. A system-theoretic approach to safety and security co-analysis of autonomous ships. Ocean Eng. 2021, 222, 108569. [Google Scholar] [CrossRef]
- Yan, F.; Zhang, Q.; Ye, S.; Ren, B. A novel hybrid approach for landslide susceptibility mapping integrating analytical hierarchy process and normalized frequency ratio methods with the cloud model. Geomorphology 2019, 327, 170–187. [Google Scholar] [CrossRef]
- Chaal, M.; Banda, O.A.V.; Glomsrud, J.A.; Basnet, S.; Hirdaris, S.; Kujala, P. A framework to model the STPA hierarchical control structure of an autonomous ship. Saf. Sci. 2020, 132, 104939. [Google Scholar] [CrossRef]
- Ramos, M.A.; Thieme, C.A.; Utne, I.B.; Mosleh, A. Human-system concurrent task analysis for maritime autonomous surface ship operation and safety. Reliab. Eng. Syst. Saf. 2020, 195, 106697. [Google Scholar] [CrossRef]
- Aylward, K.; Weber, R.; Lundh, M.; MacKinnon, S.N.; Dahlman, J. Navigators’ views of a collision avoidance decision support system for maritime navigation. J. Navig. 2022, 75, 1035–1048. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
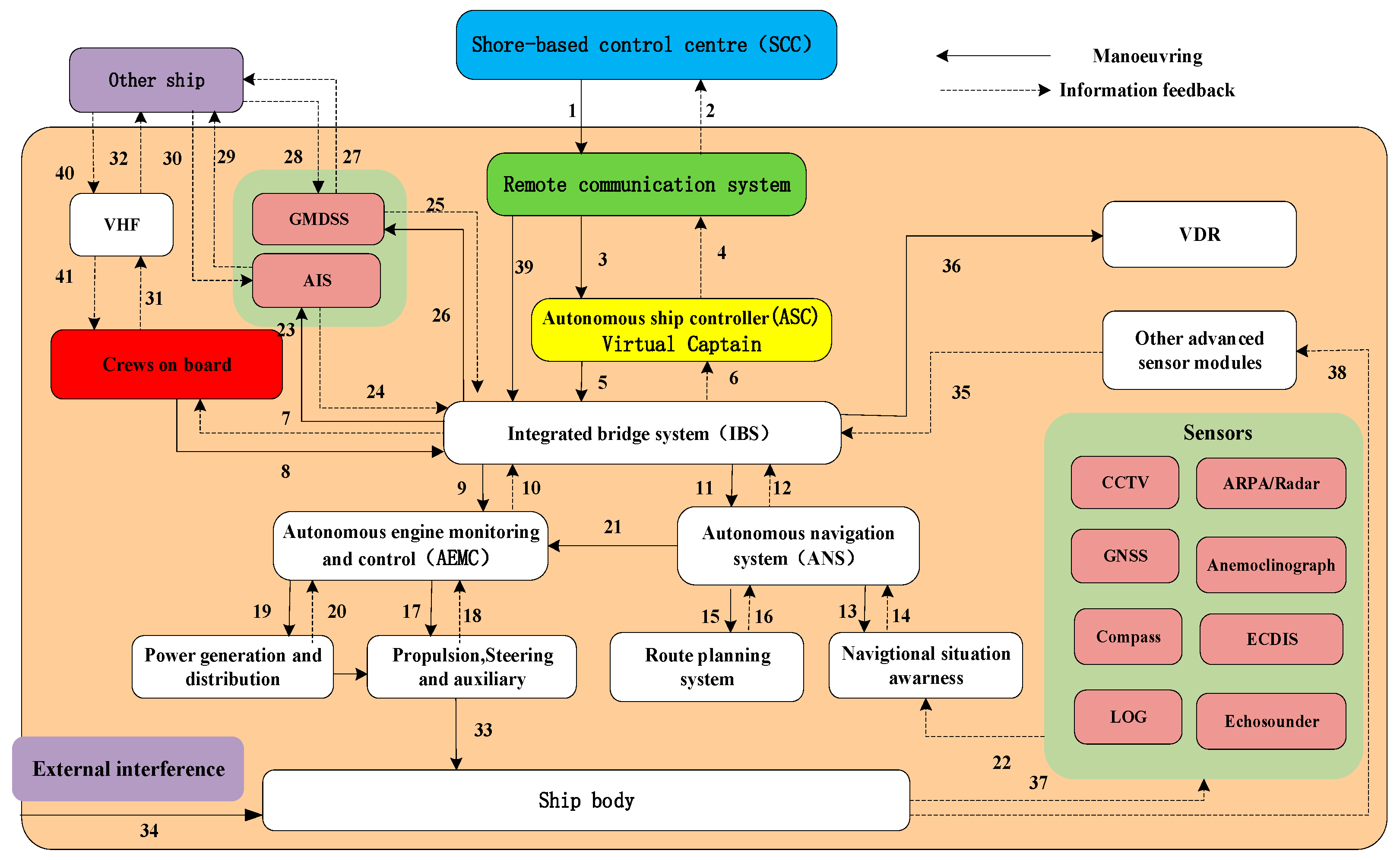
| NCMs. | Control Process |
|---|---|
| MC | Perception (34/40/41→37/38/28/30/31/32→22/24/25/35/→14/16/18/20/10/12)→Decision making (7→Crew→8) →Action (9/11/→13/15/17/19/31→33) |
| RC | Perception (34/40/412→37/38/28/30→22/24/25/35/→14/16/18/20/10/12)→Decision making (6→ASC→4→2→SCC→1→3→5 or 6→ASC→4→2→SCC→1→39)→Action (9/11/→13/15/17/19-33) |
| AC | Perception (34/40/41→37/38/28/30→22/24/25/35/→14/16/18/20/10/12)→Decision making (6→ASC→5)→Action (9/11/→13/15/17/19→33) |
| Parameter | Description | Parameter | Description |
|---|---|---|---|
| Length | 117 m | Ship age | 5 years |
| Width | 17 m | Initial position | No. 2 pilot boarding point in Yangkou Port |
| Depth | 9.9 m | Final position | No. 1 (S) pilot boarding point in Shanghai Port |
| Draft | 4.2 m | Distance | 110 n mile |
| Ship Type | Container | Voyage time | 11 h |
| Type | Direct Causes in AC | Direct Causes in MC | Direct Causes in RC | |
|---|---|---|---|---|
| UCA-1 | CF | Vessel sensors (Radar, ECDIS or GNSS) failure; control command loss due to defects of control algorithms; propulsion or steering failure | Vessel sensors (Radar, ECDIS or GNSS) failure; negligence, fault and lack of skill of crews; propulsion or steering failure | Vessel sensors (Radar, ECDIS or GNSS) failure; negligence, fault and lack of skill of operators; remote control equipment failure in SCC |
| UI | Unable to receive feedback information; control command not executed; software engineer lacking knowledge of the latest rules or potential traffic scenarios | Unable to receive feedback information; no response from propulsion or steering system; | Unable to receive feedback information; poor cooperation between the ship and the RCC; communication failure or break off; control command not executed | |
| ED | Clutter interference by rain or snow; complex traffic situation | Clutter interference by rain or snow; complex traffic situation | Clutter interference by rain or snow; complex traffic situation | |
| UCA-2 | CF | ECDIS data error or GNSS data loss; control command error due to defects of control algorithms | ECDIS data error or GNSS data loss; human negligence or decision-making error | ECDIS data error or GNSS data loss; human negligence or decision-making error; control action error due to defects of control algorithms |
| UI | Software engineer lacking knowledge of the latest rules or potential traffic scenarios; received incorrect perception information; error executing the control command | Violation or incorrect operation received incorrect perception information; unknown error from propulsion or steering system | Negligent or incorrect operation; The complacency brought about by intelligence; received incorrect perception information and error alert; poor cooperation between the ship and the RCC | |
| ED | Change in current or winds; complex traffic situation | Poor visibility; heavy waves or wind; complex traffic situation | Poor visibility; heavy waves or wind; complex traffic situation | |
| UCA-3 | CF | Control algorithm defects, decision-making process delay | Crew decision-making process delays due to lack of experiences | Operator decision-making process delays due to lack of experiences; control algorithm execution delay |
| UI | Communication network delay; system response delay; information transmission delay | Communication network delay; control response delay; information transmission delay | Communication network delay; remote control response delay; information transmission delay | |
| ED | Change in natural (currents, wind or wave) and traffic conditions | Change in natural (currents, wind or wave) and traffic conditions | Change in natural (currents, wind or wave) and traffic conditions | |
| UCA-4 | CF | The propulsion or steering system failure onboard; insufficient command execution due to control algorithm defects | The propulsion or steering system failure onboard; insufficient decision making due to operator cognitive limitations | Failure of remote control equipment or vessel control equipment; insufficient decision making due to operator cognitive limitations |
| UI | Communication interrupt; inadequate execution of control commands; received incorrect or insufficient sensor information | Communication interrupt; inadequate execution of control commands; received incorrect or insufficient feedback; low coordination with other ships, the port or maritime authority | Communication interrupt; inadequate execution of remote-control commands; received incorrect or insufficient feedback; low coordination with other ships, the port or maritime authority | |
| ED | Change in natural (currents, wind or wave) and traffic conditions | Change in natural (currents, wind or wave) and traffic conditions | Change in natural (currents, wind or wave) and traffic conditions |
| No. | Indicator | Risk Performance | |||
|---|---|---|---|---|---|
| R1 | R2 | R3 | R4 | ||
| X1 | Wind (m/s) | [0,4) | [4,9) | [9,15) | [15,∞) |
| X2 | Current (m/s) | [0,0.5) | [0.5,1) | [1,2) | [2,∞) |
| X3 | Visibility (nmile) | [8,∞) | [4,8) | [2,4) | [0,2) |
| X4 | Wave (m) | [0,0.3) | [0.3,0.5) | [0.5,1.5) | [1.5,∞) |
| X5 | Route crossings (number) | [1,2) | [2,3) | [3,4) | [4,∞) |
| X6 | Traffic density (N/h) | [0,5) | [5,10) | [10,15) | [15,∞) |
| X7 | Traffic complexity (score) | [0,36) | [36,72) | [72,108) | [108,∞) |
| X8 | Personnel competency | Strong | Stronger | Weaker | Weak |
| X9 | Physical and mental state of personnel | Good | Better | Worse | Poor |
| X10 | Working conditions of remote control equipment | Normal | Individual failure | Partial failure | All failure |
| X11 | Violation or abnormal operation | Rarely | Occasionally | Frequently | Constantly |
| X12 | Human–computer interaction interface | Normal | Individual failure | Partial failure | All failure |
| X13 | Communication network | Good | Better | Worse | Poor |
| X14 | Working conditions of sensors | Normal | Individual failure | Partial failure | All failure |
| X15 | Working conditions of controllers | Normal | Individual failure | Partial failure | All failure |
| X16 | Working conditions of autonomous decision-making system | Normal | Individual failure | Partial failure | All failure |
| Participant Group | Number | Percentage (%) | Other Information | |
|---|---|---|---|---|
| Group I | Scholar/captain | 5 | 16.67 | There are 3 professors and 2 associate professors |
| Scholar/officer | 5 | 16.67 | They are all associate professors and have rich navigation experience | |
| Group II | Captain | 3 | 10 | They are all working in merchant vessels |
| Pilot | 6 | 20 | ||
| Officer | 2 | 6.66 | ||
| Group III | Engineer of CCS | 3 | 10 | They are all senior engineers with no prior navigation experience |
| Group IV | Scholar/information engineer | 3 | 10 | They all have no navigation experiences |
| Scholar/officer/information engineer | 3 | 10 | They have acquired rich navigation expertise through their previous roles as vessel officers | |
| Total | 30 | 100 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Chen, W.; Guo, Y.; Hu, S.; Xi, Y.; Wu, J. Risk Performance Analysis on Navigation of MASS via a Hybrid Framework of STPA and HMM: Evidence from the Human–Machine Co-Driving Mode. J. Mar. Sci. Eng. 2024, 12, 1129. https://doi.org/10.3390/jmse12071129
Li W, Chen W, Guo Y, Hu S, Xi Y, Wu J. Risk Performance Analysis on Navigation of MASS via a Hybrid Framework of STPA and HMM: Evidence from the Human–Machine Co-Driving Mode. Journal of Marine Science and Engineering. 2024; 12(7):1129. https://doi.org/10.3390/jmse12071129
Chicago/Turabian StyleLi, Wei, Weijiong Chen, Yunlong Guo, Shenping Hu, Yongtao Xi, and Jianjun Wu. 2024. "Risk Performance Analysis on Navigation of MASS via a Hybrid Framework of STPA and HMM: Evidence from the Human–Machine Co-Driving Mode" Journal of Marine Science and Engineering 12, no. 7: 1129. https://doi.org/10.3390/jmse12071129
APA StyleLi, W., Chen, W., Guo, Y., Hu, S., Xi, Y., & Wu, J. (2024). Risk Performance Analysis on Navigation of MASS via a Hybrid Framework of STPA and HMM: Evidence from the Human–Machine Co-Driving Mode. Journal of Marine Science and Engineering, 12(7), 1129. https://doi.org/10.3390/jmse12071129