Abstract
Autonomous berthing technology is a crucial engineering control problem within the ship intelligence system, encompassing a series of complex operations and technologies. Firstly, this paper analyses the research on autonomous berthing technology from a bibliometric point of view in order to obtain an overview of its past and present development and to outline the importance of this technology. Secondly, a literature review is conducted on each of the four aspects of autonomous berthing technology, namely sensing technology, berthing type, control method, and evaluation method, which can help to quickly understand the main aspects of this technology. Thirdly, the ship-assisting technologies needed to achieve autonomous berthing are discussed and analysed from six aspects: dynamic collision avoidance, path planning, path tracking, heading control, tug assistance, and shore-based systems. Finally, the challenges faced by the ship autonomous berthing technology on the way of development are summarised, and future development is projected. This paper aims to provide a more comprehensive perspective for analysing and researching ship autonomous berthing technology.
1. Introduction
A new technological revolution and industrial transformation characterised by the deep integration of information technology and manufacturing are emerging, accelerating the digital transformation of the shipping and shipbuilding industries. The advancement of ship intelligence has become the core driving force in this process, with autonomous berthing technology being a significant manifestation of ship intelligence [1]. In response to international trends, China, as a major global player in shipbuilding and shipping, has issued a series of policies and guidelines on ship intelligence. For example, “Made in China 2025” identifies high-tech ships as one of the ten key development areas. Additionally, the China Classification Society has categorised intelligent ships into three levels: A1-anchorage to anchorage with piloted navigation; A2-anchorage to anchorage with remote navigation; and A3-berth to berth, fully autonomous [2].
In the development of ship intelligence, ship control remains one of the crucial issues, and autonomous berthing, due to its complexity and significance, has become an urgent engineering control problem within the ship intelligence system [3]. Traditional singular control methods no longer meet practical needs. To adapt to developments, berthing control methods that integrate neural networks, optimal control, adaptive control, and sliding mode control have emerged. For instance, the combination of Line of Sight navigation and Linear Active Disturbance Rejection Control addresses the uncertainties and external disturbances in ship berthing models [4]; the integration of global optimal rudder control with covariance matrix adaptive evolutionary strategy is applied to a numerical model coupling surge, sway, yaw, and roll [5]; and genetic algorithms are used to design parameter-optimised LQR controllers [6].The ship berthing process involves close interactions among ships, waterways, and docks, encompassing a series of complex operations and technologies [7,8]. In this process, fully actuated ships achieve autonomous berthing using their own propulsion systems, while underactuated ships rely on tugboats for the necessary power and control [9,10]. The assistance of tugboats not only provides additional propulsion but also helps control the ship’s posture [11], especially under strong wind and current conditions, making their role critical [12]. For the study of underactuated and fully actuated control, Liao et al. [13] introduced the Serret-Frenet frame and global coordinate transformation, transforming the control problem of underactuated systems into that of actuated systems.
Intelligent ship berthing technology has evolved from primarily focusing on automation to considering the use of various ship technologies and auxiliary equipment to achieve autonomous berthing. This includes dynamic collision avoidance technology [14], which uses sensors such as LiDAR and laser rangefinders to obtain the ship’s speed, heading, and position, and to monitor other ships and obstacles in the surrounding waters in real time. Local path planning dynamically generates the optimal route to the target berth based on the real-time environment and the ship’s current position [15]. Heading control technology adjusts the ship’s rudder and propulsion system to control its direction and posture [16], and shore-based systems enable real-time data and control command exchanges between the shore control centre and the ship’s autonomous berthing system [17]. Additionally, the coordination of sensing technologies, path tracking, tugboat assistance, and dynamic positioning systems is crucial for autonomous berthing in real-world scenarios, relying on the comprehensive application of these technologies [18]. This not only marks the shipping industry’s advance towards higher levels of automation and intelligence but also indicates the future development direction of intelligent ships.
The main framework of the paper is shown in Figure 1. The first section of this paper uses a literature dataset analysis tool to outline the importance of ship berthing technology. The second section summarises the current state of research on sensing technologies, berthing types, control methods, and evaluation methods involved in the autonomous berthing process, providing a quick understanding of the main aspects of this technology. The third section discusses the various ship technologies that need to be integrated to achieve autonomous berthing, including dynamic collision avoidance, path planning, path tracking, heading control, tugboat assistance, and shore-based systems. The fourth section analyses the current challenges, providing potential breakthrough directions for researching autonomous berthing. The fifth section discusses future development directions. Overall, this review provides a comprehensive perspective for in-depth understanding and research into ship autonomous berthing technology.
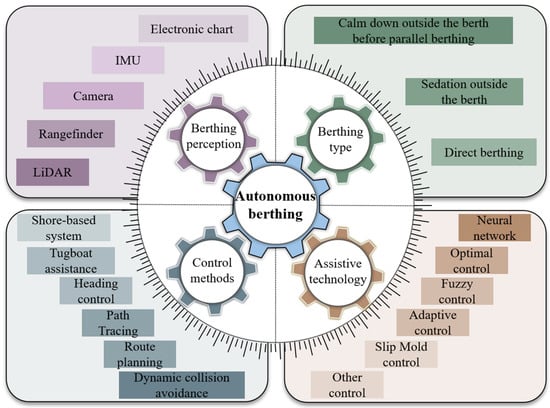
Figure 1.
Research framework diagram.
2. Literature Dataset Analysis
Through bibliometric analysis, we can quickly and accurately grasp the overall view of a research field, easily understand its development trajectory, relevant issues, research topics, and methodological orientations, thus intuitively understanding and interpreting related information [19]. CiteSpace 6.3.R1 and VOSviewer 1.6.20 are software tools used for the visualisation and analysis of scientific literature. The 152 articles analysed in this subsection were mainly selected from the Web of Science and CNKI databases after careful browsing and relevance determination. Presenting the collected literature in the form of a scientific knowledge map not only helps organise past research trajectories but also aids researchers in effectively integrating and analysing complex literature information, thereby discovering new research opportunities and trends.
2.1. Keywords
By importing the selected literature into VOSviewer for co-keyword analysis, a heatmap, as shown in Figure 2, is generated, displaying the density of shared keywords in the selected literature. “automatic berthing” and “autonomous berthing” are at the centre of the heatmap, clearly indicating that they are two main research directions in the ship berthing field. However, the density of autonomous berthing is lower than that of automatic berthing, indicating that as intelligent ships develop, there is a gradual increase in the demand for autonomy in engineering practise. Based on automatic berthing, autonomous berthing further expands the capabilities of the control system. It not only involves technologies such as path planning, optimal control, and fuzzy control but also requires the system to have capabilities like berthing perception, decision-making, and system identification to adapt and handle uncertainties such as sudden changes in wind, waves, and currents. The co-keywords “navigation” and “trajectory tracking” involve the positioning of ships and precise trajectory tracking, which are crucial factors for maintaining efficiency and accuracy in the complex operations of autonomous systems. Overall, the realisation of autonomous berthing is inseparable from the support of automatic berthing. This evolutionary process reflects a transition from structured, pre-programmed control to dynamic, intelligent decision-making and adaptiveness.
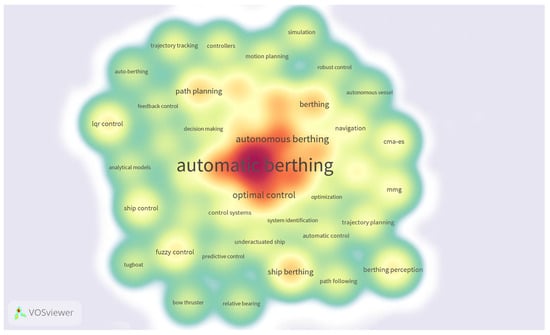
Figure 2.
Keyword heat map.
2.2. Development Trends
Using CiteSpace to extract keywords from the literature dataset, and sorting the keywords according to their highlighting intensity in the literature dataset, we can obtain Figure 3, which reflects the research dynamics in the field of ship berthing technology from 2010 to 2024. At the same time, the visualisation of the main sources of the collected literature leads to the results shown in Figure 4. As seen in Figure 3, “autonomous berthing” technology becomes the focus of research in 2022 and shows the highest intensity, indicating the increasing importance of automation and intelligence in ship berthing and the rapid development of smart ships towards autonomy. The keyword “automatic berthing” had a high research intensity between 2018 and 2020, and although it has weakened since then, it still indicates that automatic berthing technology is a key research area and the basis for the continuous development of autonomous berthing. If scholars want to carry out research on autonomous berthing, they can make innovations and breakthroughs from the existing research on automatic berthing. The keyword “optimal control” had an intensity of 2.71 in 2010 and will become the focus of research again in 2020, which indicates that optimisation theory is still the core research direction for improving the efficiency and safety of ship berthing. For “ship control”, “path tracking”, “path planning”, “berthing control”, “lqr control” and “collision avoidance”, although the intensity of the keywords is low, their appearance indicates that ship berthing technology has rich research connotations and diverse research directions. Generally speaking, the research on ship berthing technology is undergoing a transformation from traditional control theory to automatic berthing and then to autonomous berthing, which is closely related to the demand for improving efficiency and safety in the global shipping industry and technological progress. If the keywords are visualised, Figure 5 can be obtained, which further proves the results of the previous analysis.

Figure 3.
Ranking of the intensity of keyword prominence.
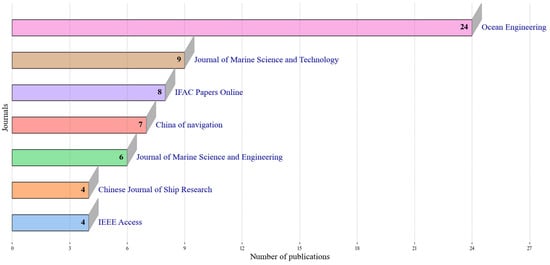
Figure 4.
Number of publications by journals.
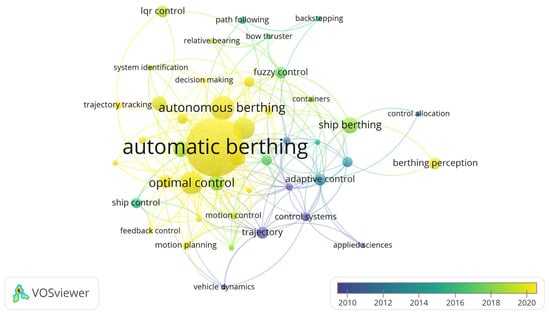
Figure 5.
Keyword visualisation.
2.3. Related Technologies
Using VOSviewer for visualising co-technologies, the display illustrates the technological methods related to ship berthing, with different colours indicating their development over time. As shown in Figure 6, in recent years, keywords such as “artificial neural network”, “optimal control”, and “model predictive control” have become increasingly prominent, indicating that research in the ship berthing field is evolving from traditional control methods to more intelligent control systems. In the context of ship berthing, “collision avoidance” facilitates safe berthing and involves not only basic control issues but also the identification and avoidance of potential collision risks; “fuzzy control” addresses uncertainties in the actual marine environment and overcomes the challenges posed by the inability to use precise mathematical models; “machine learning” and “system identification” are markers of the shift towards more intelligent and autonomous ship berthing technologies, where machine learning enables systems to learn from data and improve performance, and system identification helps establish more accurate ship dynamic models; “control”, “motion control”, “adaptive control”, and “sliding mode control” are all crucial control technologies for achieving automation and autonomy in ship berthing. The diagram illustrates that other technologies involved in autonomous ship berthing, such as “path planning”, “trajectory tracking”, and “navigation”, correspond to route planning, trajectory tracking, and navigation, respectively, which are vital components to ensure that ships can precisely berth along predetermined paths.
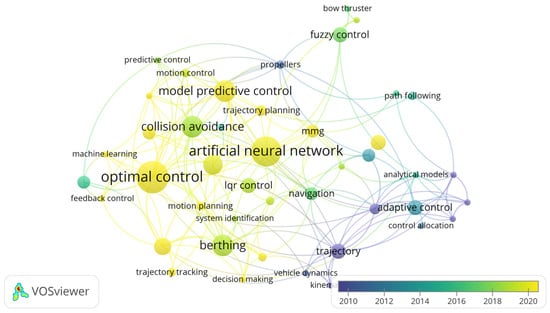
Figure 6.
Visualisation of relevant technologies.
3. Autonomous Berthing
This section outlines a number of key aspects of autonomous berthing technology for ships, including sensing technology, berthing types, control methods, and evaluation methods. By exploring the current status of these areas in depth, it will point out the research direction for future researchers and also provide some help to the innovation points of autonomous berthing technology for ships.
3.1. Sensing Technology
In 2018, the China Classification Society released the Guidelines for Autonomous Cargo Ships, which stipulate relevant technologies such as autonomous berthing and unberthing scene perception [20]. Ship berthing perception technology is not only a core functional module to ensure the autonomous system of the ship, but also a prerequisite for autonomous berthing and an important basis for decision-making and control [21]. The berthing sensing flowchart is shown in Figure 7.
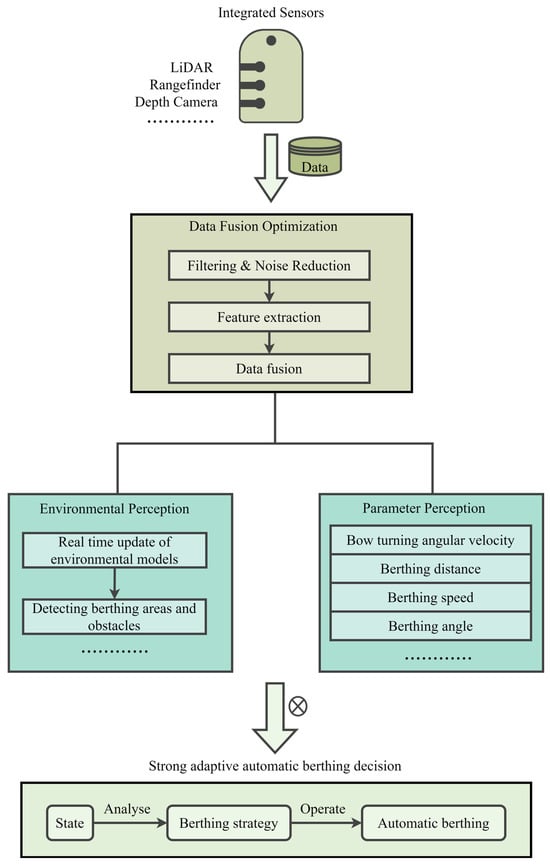
Figure 7.
Berthing perception process.
- (1)
- LiDAR
LiDAR is a commonly used device in berthing sensing, and its schematic diagram is shown in Figure 8. In the field of berthing perception, Chen and his team [22] developed a berthing information extraction system based on 3D LiDAR in 2021. They used a laser scanner as the detection unit to effectively monitor a Ro–Ro ship at Ocean Island in Lushun Port. In 2023, Chen et al. [23] first proposed a real-time tracking and berthing system based on Light Detection and Ranging (LiDAR), which can accurately identify dynamic and static targets and efficiently reposition ships in complex berthing scenarios. They conducted a series of on-site monitoring experiments on the “Yu Kun” training ship at Dalian Port and also constructed a berthing simulation scenario under occlusion conditions to test the algorithm. Subsequently, they proposed a real-time ship tracking and dynamic berthing information extraction system based on 2D LiDAR, which preprocesses, segments, and filters data in polar coordinates, and merges ship groups formed due to “blind spots” [24]. The system has been effectively adapted to different berthing scenarios and was validated through experiments on the “Yu Kun” training ship at Dalian Port.
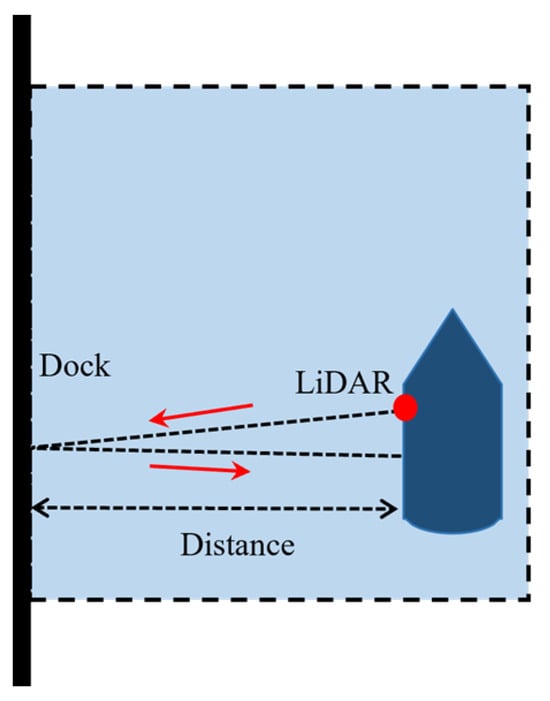
Figure 8.
LiDAR schematic diagram.
Other scholars have made flexible use of LiDAR in their research on ship berthing sensing technology based on 3D LiDAR. Qi et al. [25] proposed a method for better monitoring the berthing and unberthing states of vessels by introducing the GIS spatial analysis technique. By deploying microwave radar arrays at different locations on the ship, Xiong et al. [26] designed a hardware architecture for real-time acquisition of dynamics data to realise automatic berthing of the ship; for the deployment of radar arrays, Lu et al. [27] proposed a method based on the three-dimensional point cloud data of LiDAR to obtain the angle of offshore ships, which has the advantage of effectively obtaining the angular information of the ship when berthing, and helping the ship to maintain parallel berthing as far as possible. In addition to shipboard LiDAR, the use of shore-based LiDAR is also indispensable. Ma [28] used shore-based LiDAR to obtain the point cloud data of the berthing ship, so as to propose a method of estimating the auxiliary information of the berthing ship, which provides a certain technical support for the environment perception in autonomous berthing; Wang et al. [29] proposed a berthing state estimation relying only on 3D LiDAR, which not only enhances the accuracy of autonomous berthing, but also provides more accurate and richer information about multiple types of berthing states.
- (2)
- Rangefinders
The main disadvantage of rangefinders is their limited measurement range and limited data dimensions, as they typically only provide point-to-point distance measurements and lack comprehensive spatial form capture. Although rangefinders have advantages in terms of cost and ease of operation, they are somewhat limited in functionality for applications that require more advanced and comprehensive data, and they are usually used in combination with other sensing devices. Through comparing the characteristics of shore-based berthing equipment and ship-based berthing devices, Wang et al. [30] derived a parameter calculation method and corresponding error model based on laser rangefinders and differential satellite navigation receivers. This research not only provides designers with references for selecting and arranging berthing equipment but also familiarises maritime department personnel with parameter changes during the berthing process.
Advanced technologies such as the Internet of Things (IoT), big data, and cloud computing are gradually impacting our daily lives. Similarly, in the field of ship technology, these technologies are widely used to enhance functionality, automate ship operations, and develop innovative intelligent devices. To achieve this transformation, a large number of applications need to be developed. Kamolov et al. [31] designed an IoT-based dedicated system that uses port sensors and ship notifications to search for available spots, combined with ultrasonic sensors to detect ships and modify empty berths for docking.
- (3)
- Cameras
Cameras can provide visual information about ships and docks during the berthing process, helping to identify signs and obstacles in the berthing environment. They are most commonly used for monitoring. Hanguen et al. [32] designed a novel artificial intelligence vision-based monitoring system for ship berthing. Additionally, visual systems can use high-resolution images to precisely assist ships in adjusting their heading and speed to ensure safe berthing. In this area of research, Cao et al. [33] employed the DeepLabv3+ image segmentation model to study an auxiliary berthing system using deep learning visual perception, accurately segmenting features of ships and docks, and designing a corresponding berthing warning algorithm. Fu and others [34], based on a monocular camera, used an improved ORB (Oriented FAST and Rotated Brief) enhanced SLAM (Simulation Localization and Mapping) algorithm for image feature extraction to solve the monocular camera motion posture and ultimately established a ship motion control model to solve automatic berthing issues. Volden et al. [35,36] also applied visual perception to ship positioning systems.
Although cameras can provide high-resolution image data, they are limited by lighting conditions and viewing angles. In 2021, Xie et al. [37] combined cameras with LiDAR to design a deep learning-based 3D perception algorithm, and using datasets generated by virtual physics engines, they built a ship berthing simulation system based on the GNC framework, conducting simulation tests to verify the algorithm’s performance. In 2022, Chen [38] integrated depth cameras with LiDAR to complete recognition of shore-based mooring devices based on an improved YOLOv4, and constructed an unmanned ship autonomous berthing environment perception system experimental platform, verifying its reliability during the autonomous berthing process. In 2023, Su-Rim et al. [39] developed an autonomous docking system based on symbol recognition using cameras and LiDAR. It is evident that in the research process of autonomous ship berthing perception technologies, cameras are often used in conjunction with LiDAR, as they can effectively measure and track static and dynamic obstacles during the berthing process, providing crucial spatial and speed information.
- (4)
- IMU
The Inertial Measurement Unit (IMU) can provide accurate motion data in ship berthing perception, assisting ships in precise position and posture control during berthing. Its role diagram is shown in Figure 9. And it can also be used in conjunction with other navigation tools, such as the Global Positioning System (GPS), to provide high-precision location and speed information. Hu [40] used LiDAR to design a ship self-motion state estimation based on point cloud matching, and its accuracy and stability were verified by a comparison test with an unmanned boat experimental platform based on the Robot Operation System (ROS) and integrated navigation GNSS/IMU, and also designed a ROS-based ship berthing information perception framework. The greatest benefit of this research is that it can be ported to computers equipped with the Ubuntu system and can be expanded by integrating sensors such as LiDAR, cameras, IMU, and GPS.

Figure 9.
IMU role diagram.
- (5)
- Electronic Navigational Charts
Electronic nautical charts play a crucial role in ship berthing, providing crew members with detailed information about waterways and dock layouts, helping to plan routes, and ensuring the safety and precision of the berthing process. In 2018, Aisikaer [41] developed a monitoring and dispatching system for inland vessels based on GPS and electronic navigational charts, which improved system accuracy by integrating GPS with electronic navigational charts. In 2019, Lu et al. [42] proposed a method to establish a precise environmental potential field based on electronic nautical chart vector data, which could describe different types of obstacles and narrow waterways, and used this to plan routes for unmanned ships. In 2024, Ma et al. [43] designed a regional coverage path planning method for multiple unmanned surface vessels based on the Electronic Chart Display and Information System, extracting land and depth information from the ENC.
3.2. Berthing Types
Intelligent ships employ diverse manoeuvring techniques during berthing, and the classification of ship berthing operations varies according to different manoeuvring methods. According to current research, automatic berthing types include direct approach, stabilisation outside the berth, first off-berth calming, and then parallel berthing.
- (1)
- Direct Approach
The direct approach berthing strategy is suitable for stable waters with minimal wind and calm currents, as well as docks with good visibility, simple structures, and sparse traffic. Compared to other methods, this approach is more applicable to smaller or more manoeuvrable vessels. In 2019, Zhang [44] investigated manual berthing manoeuvres under crosswind conditions from the stern. In 2020, Guo [45] summarised that the key to safe self-berthing involves controlling residual speed, timely anchoring, and coordination among multiple departments. To overcome the disadvantages of manual berthing, intelligent ships incorporate navigation, positioning technologies, and sensing technologies to ensure precise control during the direct approach, significantly enhancing berthing efficiency compared to manual operations, reducing the operational burden on crew members, and allowing them to focus on monitoring and other critical tasks.
- (2)
- Stabilisation Outside the Berth
Most automatic berthing studies involve stopping the ship at a distance outside the berth. Hasegawa et al. [46,47] proposed that ships follow a virtual navigation line at a 30° angle to the dock shoreline to the area around the berth, stabilising at a position 1.5 times the ship length from the berth laterally, thus completing the automatic berthing. This type of automatic berthing is more often applied in environmentally unstable or spatially limited berths, such as areas with strong winds, strong currents, or frequent activity from other ships. Stabilisation outside the berth provides an opportunity for pre-adjustment, allowing the ship to reach the optimal position and state before entering the final berth. The schematic is shown in Figure 10. In Figure 10, I refers to the outside berth calming zone, II refers to the berths, and III refers to the docks. The process of state ① to state ② refers to the calming behaviour of the ship while performing berthing). Additionally, stabilisation outside the berth allows for more detailed manoeuvres, where ships precisely adjust their position and speed through automatic berthing controls. It also optimises the ship’s berthing path and speed through real-time data analysis and advanced algorithms, ensuring that each berthing is as smooth and safe as possible.
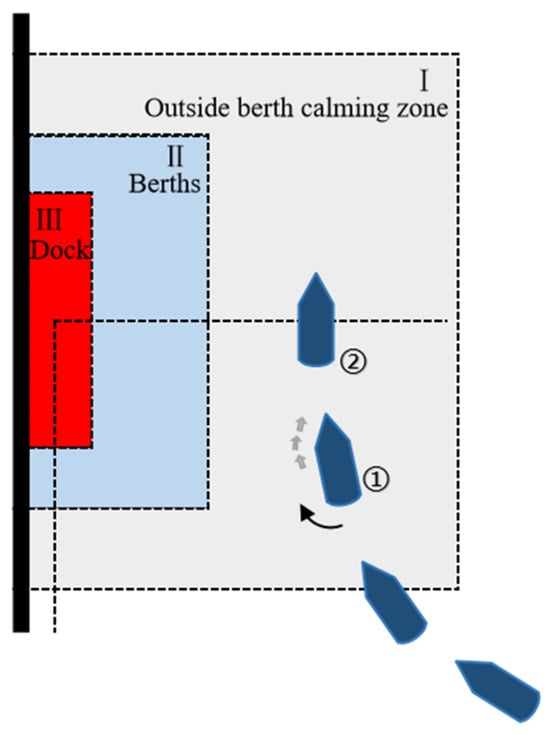
Figure 10.
Stabilization outside the berth schema.
- (3)
- First Off-Berth Calming and then Parallel Berthing
In automatic berthing, it is more efficient and safer to use off-berth calming and then parallel berthing, especially for harbours with complex environments or berthing space constraints. The schematic is shown in Figure 11 (in Figure 11, the process from state ② to state ③ refers to the parallel berthing of the ship after calming down). By splitting and restructuring the tasks in the final parallel berthing stage, Yin Yong and his team [48,49] designed a universal automatic berthing system scheme using bow and stern thrusters to connect the initial state of a ship calming outside the berth or sailing to the berth with a certain speed by other berthing methods; Yuan et al. [50] used the full-drive ship calming outside the berth first and then berthing in parallel, and designed an automatic berthing controller for ships to solve the problem of automatic berthing of full-drive ships under the influence of model uncertainty, actuator saturation, unknown environmental perturbations, and shore wall effect. Compared with manual berthing manoeuvring, the automatic berthing system can automatically adjust the propulsion and rudder systems according to the real-time monitored environmental data and ship dynamics in the parallel berthing phase and accurately control the ship’s moving direction and speed so as to meticulously manoeuvre the ship to berth parallel to the quay.
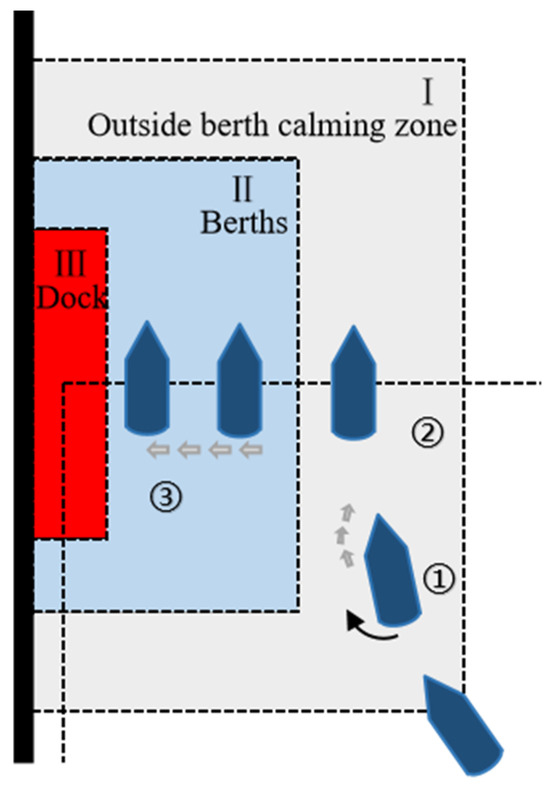
Figure 11.
First off-berth calming and then parallel berthing schema.
3.3. Control Methods
In the research of the ship autonomous berthing control methods, the innovative design is mainly based on neural networks, optimal control, fuzzy control, adaptive control, sliding mode control, etc., which are the main control methods with their own advantages and disadvantages, as shown in Table 1.

Table 1.
Advantages and disadvantages of the main control methods.
3.3.1. Neural Networks
Neural networks, known as artificial neural networks (ANNs), are an algorithmic system inspired by neurons in the brain [51], with strong nonlinear mapping capabilities [48], that can mimic the actions of the human brain in performing the various stages of berthing [52]. And therefore, it is regarded as one of the most effective theories for the autonomous berthing of ships [53]. The schematic diagram is shown in Figure 12.
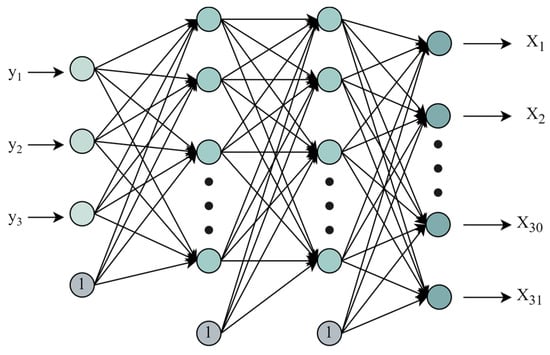
Figure 12.
Neural network diagram.
- (1)
- Large ships
Large ships have large inertia, poor berthing performance, a lack of heading stability, and other shortcomings [54]. Their berthing manoeuvring process is more difficult [55], and most of the current berthing operations rely on the assistance of tugboats [56]. However, with ship intelligence, the study of autonomous berthing technology for large ships has become particularly important, and the combination with neural networks is an inevitable thing [57]. In order to solve the final calming control problem in automatic berthing, Wang [58] used artificial neural networks to replicate the successful berthing process of experienced captains, and then built a simple berthing simulation platform through the established mathematical model of the ship’s motion and the GUI (Graphical User Interface) control. At the same time, he used sample data generated from artificial berthing experiments and a three-layer BP neural network for parameter training. Jia et al. [59] proposed to train the neural network with the coordinate system of the berth vertex as the origin to achieve the universality of the autonomous berthing controller. They selected the container ship “Galaxy” in the V.Dragon-5000 ship handling simulator to successfully carry out the berthing training in the port of Dalian, and successfully expanded to the port of Shekou in Shenzhen and Zhangyi port in Singapore, where there is no training data. Despite the in-depth research on berthing control, real-time berthing control is still a difficult problem. Shimizu et al. [60] proposed a method that combines supervised learning and reinforcement learning to obtain online berthing control laws.
- (2)
- Small and medium-sized ships
Small and medium-sized ships are more sensitive to wind, waves, and currents than large ships, which makes their accurate modelling particularly complex [61]. Fan and his team have systematically discussed the risk factors of MASS navigation, which provides a valuable reference for the risk study of the autonomous berthing process [62]. In 2013, Ahmed et al. [47] combined ANN with ship berthing by using an MMG model to predict the ship’s actual behaviour. The ANN controller was trained and tested under various conditions with good results; Qu et al. [63] added a PD controller to such a concept in 2021. In 2017, Zhang et al. [64] designed a three-layer neural network controller based on ANN and BP neural network algorithms and used the MMG mathematical model to conduct simulation experiments of underactuated small ship berthing, which verified the simplicity of the control effectiveness of neural network berthing controllers with reduced computational dimensions. In 2018, Nguyen et al. [65] developed a neural network-based automatic ship berthing system using parameters measured by a ranging system, and again, in 2019, he analysed the advantages and disadvantages of an artificial neural network-based automatic ship berthing system [66]. In 2021, Lee [67] proposed an automatic berthing system based on a reinforcement learning algorithm, namely the Proximal Policy Optimisation method, to eliminate the need to acquire training datasets. In the same year, Zhang [68] first solved the underactuated problem by diffeomorphism transformation and converted it into a chain structure system. Then, based on this model, she not only designed a berthing controller using backstepping and the Lyapunov method but also designed an adaptive neural network berthing controller using the RBF neural network and MLP technique and finally verified it by simulation. Further, Zhao et al. [69] in 2022 also used the RBF neural network to approximate the dynamic uncertainty part of the ship model parameters and utilised a linearised parametric form with unique dummy parameters to represent the composite uncertainty term consisting of dynamic uncertainty in the model parameters and unknown time-varying perturbations. Finally, they proved the stability of the proposed automatic berthing closed-loop control system using Lyapunov theory. In addition to the above studies, Kamil et al. [70] designed a feed-forward controller by combining an ANN and a non-simplified mathematical model, and Wang et al. [71] proposed a novel berthing trajectory prediction model based on a long short-term memory neural network.
3.3.2. Optimal Control
Optimal control allows the best solution to be selected from a range of feasible control strategies in order to effectively control a dynamical system or a motion process, and at the same time, it not only optimises its performance metrics but also ensures optimal efficiency and effectiveness. Optimal control has a long history of application to berthing control, having been used in early research on ship berthing to achieve accurate and efficient berthing manoeuvres. Mizuno and his team proposed a minimum-time ship manoeuvring method based on neural networks and nonlinear model prediction [72]. Okazaki has also performed research in this area [73]. Mizuno et al. in turn proposed a parallel simulation predictive control algorithm for automatic berthing in 2012. Computer simulations and real sea tests were conducted using the training vessel Shioji Maru, and the results proved the feasibility of the algorithm [74]. Based on their previous research results, Mizuno and his team proposed a quasi-real-time method for automatic berthing with minimum berthing time by combining a multiple shooting algorithm and a nonlinear model predictive controller to solve the optimal berthing solution and optimal trajectory in order to achieve ‘quasi-real-time’ berthing, which is comparable to the time required for minimum berthing time [75]. In the subsequent research progress, they successively proposed a recurrent neural network-based nonlinear optimal feedback controller for the ship automatic berthing system [76] and a reinforcement learning-based nonlinear optimal feedback controller for the ship automatic berthing system [77]. In addition to this, Bui et al. [78] proposed a method to achieve automatic berthing using bow and stern thrusters, specifically based on the linearization of nonlinear ship motions in the horizontal plane. An observation-based optimal controller was then designed, and a system modelling and tracking control method based on a two-degree-of-freedom servo-system design was discussed. Kayano et al. [79] implemented a flexible method of automated berthing manoeuvres by introducing variable-gain optimal control based on a statistical model of the manipulated ship.
Model predictive control (MPC) is a model-based optimal control method that enables real-time adjustments by predicting future system behaviours, and in the field of autonomous berthing, MPC can effectively deal with the challenges of multivariate and nonlinear constraints in the berthing process. In this area of research, Li et al. [12] proposed an underdriven ship control method based on nonlinear model predictive control (NMPC).Wang et al. [80] used a nonlinear model predictive control based on an accurate ship motion model in their study of berthing trajectory tracking, thus effectively improving the anti-jamming ability. Through model predictive control, Han et al. [81] tracked and optimised the ship’s motion under constraints while using Lyapunov’s theorem to ensure stability. Yuan et al. [50] proposed event-triggered adaptive time-domain model predictive control to improve the solution speed, which was finally verified by full-drive ship simulation experiments.
LQR control belongs to the category of optimal control, which adopts a full-state feedback control structure to achieve optimal control of the system by solving the optimal state feedback gain matrix. The schematic diagram is shown in Figure 13. In recent years, the application of LQR control in the field of autonomous berthing has gradually attracted attention. Esmailian et al. [82] also designed an LQR control system to suppress surface effects, including high-frequency and high-amplitude regular waves as well as high-frequency irregular waves. The LQR control is able to optimise a number of performance metrics, such as reducing time delay and improving berthing accuracy, which significantly improves the operational efficiency and safety of the ship at different berths and in complex sea states. Tian [83] designed the ship roll stabilisation controller by establishing a mathematical model of ship motion under wave disturbance and choosing the LQR optimal control algorithm, which was shown to have better sway reduction effect and robustness through simulation. Rachman et al. [84] designed a semi-online trajectory planner based on the optimal control, which was used in berthing operations. Zhu et al. [85] designed a LQR control model based on the particle swarm algorithm, which can better track the vehicle trajectory.
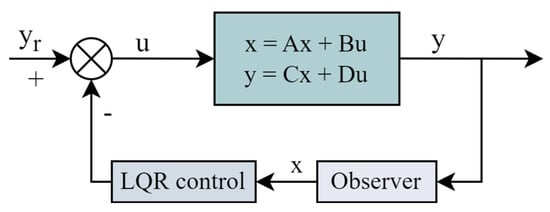
Figure 13.
LQR schematic.
3.3.3. Fuzzy Control
Fuzzy control, as a control strategy grounded in fuzzy logic, is specifically designed to cope with uncertainty and ambiguity in complex systems and to effectively achieve precise control of the system by establishing fuzzy rules between input and output variables. The schematic diagram is shown in Figure 14. In the field of autonomous berthing, fuzzy control effectively copes with environmental uncertainties, such as wind, currents, and interference from other vessels, and achieves precise berthing of ships under variable sea conditions through flexible rule matching.
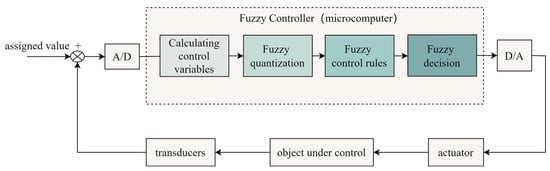
Figure 14.
Fuzzy control principle framework.
In 2017, Zhang [86] established a planar motion mathematical model of unmanned surface vessel based on the outfield Z test data, and proposed an improved artificial potential field method based on constraint processing after considering the main influencing factors of the trajectory planning of the far dock and the trajectory planning of the dock end, to complete the berthing oriented trajectory planning, then he analysed the fuzzy rule determining method for the control of the unmanned surface vessel’s bow direction and speed, thus a segmented and improved fuzzy PID control method was put forward, and simulation and comparison tests were conducted in Songhua River to verify the reliability of the control. In 2019, Nguyen et al. [87] proposed three fuzzy controllers to perform different berthing tasks. In 2022, Guo [2,49] designed a universal automatic berthing system using bow and stern thrusters, which can determine the operation steps according to the ship’s position and attitude to simplify the control requirements. Based on the port environment and berthing experience, three fuzzy controllers for bow, longitudinal, and transverse directions were designed; thereby, a parallel control strategy was proposed to solve the problem of transverse berthing bow deflection, which provides a reference for the research of automatic berthing of ships. In 2024, Sun et al. [88] proposed a novel trajectory planning strategy for the first time, which includes the Bessel curve planning, the least-squares fitting, and the speed allocation mechanism, and introduced the fuzzy strategy to obtain the integrated trajectory control of underactuated ship automatic berthing control based on the fuzzy-backstepping method.
3.3.4. Adaptive Control
Adaptive control mainly consists of model reference adaptive control (MRAC) and self-correcting control (STC), the principle of which is shown in Figure 15, and can be regarded as a feedback control system that can intelligently adjust its own characteristics according to environmental changes in order to enable the system to work in the optimal state according to some set criteria. In 2019, based on the navigation dynamics deep information of a robust neural network adaptive method, Zhang et al. [89] reconstructed the concentrated uncertainty caused by unknown ship dynamics and external perturbations. At the same time, dynamic surface control and minimum learning parameter techniques were used to reduce the computational amount. In 2020, under consideration of the influence of environmental perturbation and the disturbance of the shore wall effect, Xu et al. [90] designed the adaptive law to estimate the environmental perturbation by combining the dynamic surface control technique with the inverse step method, then introduced the adaptive robust term to deal with the disturbance of the shore wall effect on the ship, and eventually proposed a robust adaptive control method for automatic berthing of ships. Xiong et al. [26] also designed an automatic berthing method for ships in 2020 by deploying microwave radar and real-time position information at different locations on the ship, which consists of a logic inference table based on an expert system and a model-free adaptive control based on real-time data-driven control, and the results of the real-vessel test showed that the method has feasibility and practicability. In 2022, Wang et al. [91] proposed an automatic berthing method for ships based on the adaptive-mutation beetle swarm prediction (AMBS-P) algorithm to propose an autonomous berthing and unberthing control method. In the same year, Liu et al. [92] combined Lyapunov function and adaptive control to solve the underdriven ship berthing problem. In 2024, Yuan et al. [50] linearized and discretized the ship three-degree-of-freedom model, then, by using the full-drive ship to berth firstly outside the berth for calming and then berthing in parallel, he proposed the event-triggered adaptive time-domain model predictive control to improve the solution speed and finally verified it by the full-drive ship simulation experiments.
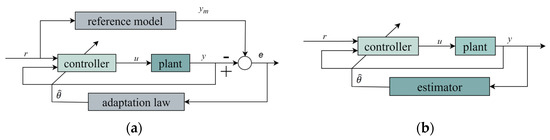
Figure 15.
Adaptive control component diagram: (a) principle of MRAC; (b) principle of STC.
3.3.5. Sliding Mode Control
Sliding mode control is a nonlinear control strategy that is known for its strong robustness characteristics. During the automatic berthing process, it will be subject to various external perturbations, such as wind, currents, waves, etc., and the sliding mode control is able to effectively resist the external perturbations and deal with the uncertainties within the system. Bu et al. [93] designed a dynamic output feedback controller, which defines a nonlinear sliding mode in an extended state space using the recursive decomposition iterative design method, and then he transformed the trajectory design and tracking problem of the control system into a calming control problem for a scalar zero-order system with the incremental feedback technique.
With the disadvantages of model dependence and sensitivity to uncertainty, sliding mode control is usually combined with other methods when conducting innovative research. In the improved research on sliding mode control, Po [94] transformed the automatic berthing control problem of unmanned surface ships into local calming control, proposed a generative adversarial neural network adaptive backstepping sliding mode control method to design the automatic berthing controller, and adopted the obstacle Lyapunov method to limit the position variables. Zou et al. [95] proposed an iterative sliding mode control method based on chaotic particle swarm optimisation; the automatic berthing route had no overshoot or oscillation, and the rudder angle rotating speed was reasonable. Xu et al. [96] designed a sliding mode manoeuvring controller and a two-stage thrust allocation scheme to convert the calculated speed and heading set-points into actual control actions; Zhu [97] optimised the autonomous berthing of an unmanned surface vessel by introducing berthing attitude constraints and designed the Dubins-RRT algorithm to smooth the paths to satisfy the unmanned boat dynamics and attitude constraints, so as to propose a global non-singular sliding-mode controller that was applicable to both obstacle-free and obstacle-bearing environments; eventually, its validity was verified by simulation.
3.3.6. Other Methods
The closed-loop gain-shaping algorithm is a simple robust control algorithm proposed by Prof. Zhang Xianku of Dalian Maritime University in 1998. It is based on the results of the hybrid sensitivity control algorithm of H∞ robust control and the idea of the loop shaping algorithm. It is an engineering algorithm constructively proposed by Professor Zhang, with clear physical concepts and a simple solution process. In 2005, Zhang et al. [98] used the third-order Nomoto model to integrate the changes in speed and water depth into the model parameters and then designed a robust PID controller with adaptability based on the closed-loop gain-shaping algorithm. They then used the S function to realise the established mathematical model of nonlinear ship motion under the interference of wind and waves and finally carried out the simulation of heading control for various water depths, ship speeds, and sea conditions to verify the good performance of the controller. In order to solve the problem of the ship automatically turning around in the harbour, they used the S function to further improve and establish the mathematical model of nonlinear ship motion in 2014, and then, based on the closed-loop gain-shaping algorithm to design a simple robust controller, the results obtained from the simulation in the Simulink environment showed that the given ship can turn around automatically within the area of three times the length (about 500 m) in class 5 wind, which provides a certain reference value for turning around berthing [99].
In the field of autonomous berthing of ships, in addition to the main methods mentioned above, a number of scholars have applied feasible methods in other fields to the autonomous berthing process in order to seek a better berthing technology, as shown in Table 2 below. In 2019, Piao et al. [100] used a line of sight algorithm to determine the trajectory of the unmanned ship and adopted an active disturbance rejection control (ADRC) method to keep the ship moving on a predetermined track, which solved the problem of the underactuated unmanned ship’s insufficient autonomous route determination and the disturbance rejection ability during automatic berthing. In 2021, Liu et al. [101] used a virtual guide system based on the heuristic-dynamic programming (HDP) method to solve the problem of automatic ship berthing control. In 2022, Akimoto et al. [102] proposed an approach to saddle point optimisation relying on oracles that solve minimization problems approximately, and developed a heuristic method for adjusting the learning rate by using (1+1)-CMA-ES (Adversarial-CMA-ES) as a minimization predictor. The proposed optimisation method can be applied to the automatic berthing control problem under model uncertainty, Maki [103,104,105] has also performed more research on the application of the CMA-ES method to automatic berthing. In 2023, Sun et al. [106] put the target large ship and four topside tugs as a whole to form a power positioning system in the upper layer collaborative control, and then according to the upper layer calculation results, the closed-loop control of each tug was completed by the lower layer control, so that he proposed a berthing control scheme based on the autonomy of multiple tugs collaboratively and proved its effectiveness through the simulation results.
Table 2.
Remaining berthing control methods.
3.4. Evaluation Methods
Despite significant progress in the research and development of ship berthing technology, research on the evaluation of system performance has lagged behind. Currently, there are a limited number of evaluation studies on the performance of ship berthing systems, resulting in the lack of a comprehensive, systematic, and widely recognised assessment framework [120]. Most technological innovations have been studied and tested mainly through simulation software, and there is a lack of practise in field validation of berthing system performance, an approach that, although it has its convenience and efficiency in the initial stages, may ignore the complexity and variability in the real application environment. In order to overcome these challenges, there is an urgent need to develop and improve the evaluation methods and criteria for the performance of ship berthing systems, and the current status of related research is shown in Table 3 below.
Table 3.
Current status of berthing evaluation research.
4. Assistive Technologies
In order to achieve autonomous berthing, it is necessary not only to optimise the control algorithms and improve the accuracy of the sensing system but also to integrate a number of ship technologies. These include dynamic collision avoidance systems to cope with channel obstacles, path planning and tracking techniques to ensure that the ship follows the proper course, heading control to adjust the ship’s attitude, and tugs to assist in berthing to provide the necessary thrust. In addition, a shore-based control system is indispensable to ensure the safety and accuracy of the berthing process by adjusting the ship’s operations in real time through communication between the land-based monitoring centre and the ship. The comprehensive application of various technologies is the key to achieving autonomous berthing. This subsection of the study is shown in Figure 16.
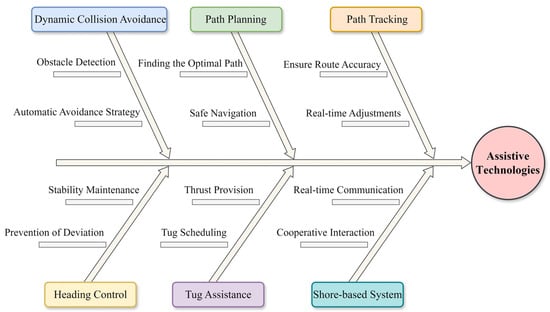
Figure 16.
Schematic diagram of assistive technologies.
4.1. Dynamic Collision Avoidance
Dynamic collision avoidance technology plays a crucial role in autonomous berthing, which can enable the ship to effectively avoid collisions with other ships or obstacles when approaching the quay or berth. In this regard, Jia [128] combined the low-speed motion characteristics of unmanned surface vessels in this environment and adopted the principle of elliptic velocity obstacle and COLREGs maritime collision avoidance rules to design a decision-making algorithm for unmanned surface vessel autonomous collision avoidance that was applicable to dynamically congested environments. In view of the problems that existed in the application of the artificial potential field (APF) method to the unmanned surface vessel autonomous collision avoidance, Qiu [129] designed an improved APF collision avoidance algorithm by modifying the artificial gravitational force and the repulsive force potential field function so that the unmanned surface vessel can avoid collisions with other vessels or obstacles when approaching docks or berths. These two autonomous collision avoidance algorithms are not fully dynamic, and to achieve fully dynamic collision avoidance, it is necessary to use advanced sensors to detect changes in the surrounding environment in real time, including the detection of the direction and speed of other vessels, obstacles at berth, etc. To enhance the real-time performance and reliability of existing ship collision avoidance methods through collision risk prediction, Xie et al. [130] proposed a predictive collision avoidance method based on an improved beetle antennae search algorithm for underactuated surface vessels.
Miyauchi and his team have achieved some success in automatic berthing collision avoidance for ships. They proposed a ship collision avoidance algorithm that adjusted the ship’s domain based on speed changes in 2022 and then proved that the optimisation method was suitable for berthing and often-neglected unberthing by testing it in ports [131]. Dynamic collision avoidance systems usually integrate multiple control techniques to cope with the complexities that may arise during berthing. In the same year, in order to simplify the mathematical model for berthing manoeuvre, they used the system identification (SI) method to construct it, which reduced the number of model tests and proved it by simulation [132]. And again in 2023, based on the mathematical model constructed by SI, they devised a new dynamic model that combined the simplicity of the Taylor expansion derivation with the high degree of freedom of MMG models, which is suitable for arbitrary configurations in a port manoeuvre simulation environment. This research is essential for the development of an autonomous berthing system [133].
4.2. Path Planning
In the field of autonomous berthing, path planning is a crucial task that helps smart ships find the optimal path in uncertain and dynamic environments in order to achieve berthing safely and efficiently. For the autonomous berthing path planning problem, Jia [128] proposed a multi-stage guidance underactuated unmanned surface vessel autonomous berthing planning algorithm. The local path planning combined the radar sensor data, which can be used to make precise route adjustments in a small range, so that the unmanned surface vessel can move smoothly in a narrow and complex harbour environment, and then simulation experiments were used to validate the feasibility of the berthing planning algorithm. This algorithm may lack validation in a real environment and needs further testing and optimisation. To achieve path planning, Song et al. [134] proposed a new advanced Dubins-RRT algorithm for path planning, which improves the capacity of obstacle avoidance and path smoothness level.
In 2021, Zhao [135] proposed a solution to small unmanned surface vessel berthing based on the “concentric circle” path planning and adaptive guidance method, which is superior to Jia in that it not only carried out virtual autonomous berthing experiments on an experimental unmanned surface vessel but also verified the real berthing experiments. The Extended Dynamic Window Approach (EDWA) for the automatic berthing of underactuated unmanned surface vessels (USVs) was also introduced by Han and others in 2021, where the entire predicted trajectory of the constant force and deceleration phases can be obtained to select the optimal trajectory for the USVs to achieve automated berthing under the influence of wind loading and obstacles; however, the complexity of the approach may have performance challenges in terms of real-time computation [136]. In 2022, Han et al. [81] presented a virtual ship bunch (VSB) method based on Frenet frames that enables tracking of curved paths while taking into account obstacle avoidance, path optimisation, and motion limitation. In the same year, Wang et al. [137] proposed an integrated collaborative decision-making method for energy saving and emission reduction based on the particle swarm algorithm, which is innovative in that it can optimise the sailing path and speed and effectively utilise wind energy to realise the optimal energy efficiency of ship navigation. And in 2024, Hu et al. [138] proposed a path planning algorithm based on hybrid A* search and Bessel curves for the problem of underactuated unmanned surface vessels automatically approaching the harbour and berthing, and the specific algorithmic performance and effect may need further practical validation and optimisation.
4.3. Path Tracking
Path tracking plays a key role in autonomous berthing, which can accurately guide the ship along the set trajectory. To achieve this goal, Sawada et al. [16] proposed an automatic berthing system applying path tracking algorithms, with the disadvantage that the algorithms are suitable to be used only for single-propeller and single-rudder ships. Different path tracking algorithms are designed to take into account the type of ship, so it is necessary to pay attention to the scenarios when learning the algorithm. For example, to solve the path tracking control problem of an underactuated unmanned surface vessel under the Serret-Frenet framework, Xu et al. [139] transformed the original underactuated system into an actuated nonlinear system, thus proposing a backstepping path tracking control method.
The path tracking algorithm enables the vessel to adjust its heading and berth stably to a predetermined position under disturbing conditions such as sea currents and wind, thus reducing errors during berthing and ensuring safety and efficiency. Yuan et al. [140] proposed an event-triggered adaptive horizon model predictive control method to improve the real-time and computational performance of path tracking, and the results showed that the proposed scheme can effectively reduce the computational cost while ensuring the control performance. Meanwhile, in order to achieve multiple objectives, some researchers integrate the path tracking algorithm with adaptive control, sliding mode control and other control methods. Shen et al. [141] proposed an adaptive iterative sliding mode control, method based on reinforcement learning, which optimises the control parameters through a neural network for underactuated ship path tracking and automatic berthing. In this regard, Wang [142] also proposed a LOS guidance law and an adaptive sliding mode control method based on a high-gain expanded state observer to design a path tracking controller for coastal sailing ships under variable water depth conditions, and the stability of the controller was verified by simulation.
4.4. Heading Control
In previous research on ships, only the single objective of heading control was often considered; e.g., Ye et al. [143] designed adaptive neural synergetic controllers for the purpose of effectively steering the USV, ensuring precise heading control to track and maintain the desired angle even in the presence of environmental disturbances such as sea winds and waves. And Sivaraj et al. [144] proposed a reinforcement learning algorithm based on Deep Q-Networks for the path following and heading control of a ship in calm water and waves.
Nevertheless, to achieve the technology of autonomous berthing of ships, it is not enough to rely on heading control alone, which is mainly responsible for adjusting the forward direction of the ship to ensure that the vessel can follow the predetermined route, and thus heading control is usually part of the process to achieve a specific goal. Based on the model-free adaptive control theory, Jiang et al. [145] explored the heading control problem of unmanned surface vehicles with uncertainties. In order to solve the problem of jet rudder sway reduction control under random wave interference, Jin et al. [146] simplified the 4-degree-of-freedom nonlinear coupled ship model into a 3-degree-of-freedom straight-line model, put forward the single rudder sway reduction based on the crossover frequency linear-quadratic optimal control method, constructed the simulation mathematical model for the heading control, and finally carried out the comparative study of the jet rudder control simulation under different working conditions. This study has an important reference value for the control of low speed navigation. Considering the problems of large rudder angle amplitude and high rudder frequency at low speed, Wang [58] designed a single neuron-based adaptive PID heading controller.
4.5. Tug Assistance
The berthing problem of underactuated ships is an important research area in the field of autonomous ship berthing control. Choi and his team [147] provide an overview of the various projects related to autonomous tugs for ship berthing and discuss research trends in the required technologies, including identification, decision-making, modelling, and control. Despite the progress made in existing research, a large safety space still needs to be reserved in practise, and it usually relies on the collaborative operation of multiple tugs for safe berthing. At present, multi-tug cooperative berthing mainly relies on manual operation, command, and control by the pilot; however, with the increase in the number of tugs, the complexity and difficulty of manual coordination increase. Pang [54] analysed the safety factors involved. Therefore, the development of an autonomous cooperative berthing system for multiple tugs, which realises efficient communication and operational coordination between tugs, is the key to improving berthing efficiency and safety. Nguyen and his team [87,148] point out that the use of tugs to assist in berthing not only reduces the pilot’s workload but also improves the accuracy of the berthing operation.
In order to achieve autonomous and cooperative berthing control of large underactuated ships with multiple tugs, Lin et al. [149] proposed the use of the tug formation control method; Yin et al. [106] designed a multilevel optimal control strategy, i.e., the upper level put the target large ship and the four topside tugs under collaborative control, then the lower level completed closed-loop control for each tug. In terms of tug autonomy, Bui et al. [9] provided a sliding mode control method to ensure that the tugs track the ship’s position at the desired speed under environmental disturbances, while Liu et al. [150] implemented autonomous berthing control for tugs using an improved backstepping sliding mode control algorithm. To achieve cooperative control, Jiang et al. [151] implemented a leader-follower formation strategy among distributed tugboats. To ensure the formation configuration, a cooperative consensus controller was integrated into the feedback controller of each tugboat local DP system.
4.6. Shore-Based System
Ship-shore cooperative refers to the technical realisation of the overall function, efficiency, safety, and economy of the intelligent navigation system to reach or come close to the optimum through information interaction, behavioural matching, and structural complementation between the ship and the shore-based institutions and facilities. In the berthing process, the synergy between ships and shore-based systems plays an important role. Firstly, the relative positions of the ship and the quay as well as the surrounding environment are monitored in real time through sensors (such as LIDAR and cameras, etc.), and these data will be transmitted to the data processing centre in a timely manner. After analysis, specific berthing instructions will be generated, which will then be sent to the ship by the control system to guide the ship to carry out precise movements and adjustments. In addition, the ship-to-shore cooperation can carry out intensive data exchange with the shipboard system through the communication base station to ensure instant updates of information and accurate transmission of instructions. In the application of this technology, Ma [28] used shore-based LiDAR to collect the point cloud data of the berthing ship, and proposed the berthing auxiliary information acquisition method. This research can intuitively and accurately obtain the ship’s berthing declination angle, offshore distance, and normal berthing speed, which greatly improves the safety and efficiency of berthing.
5. Existing Challenges
(1) The results of analysing the literature dataset show that, at present, the research on automatic berthing of ships has gradually started to emphasise the realisation of autonomy, but most of them adopt simulation methods to verify their performance indexes or demonstrate their autonomous ability in some aspects and are more inclined to automation than realising autonomous berthing in the true sense. In order to achieve autonomous berthing, it is not only necessary to optimise the control algorithm and improve the accuracy of the sensing system, but also to improve and integrate assisted berthing technologies. For example, in the study of the overall berthing path, Huang [152] divided the autonomous berthing process into three parts, namely, path-tracking guidance, local path planning, and heading control, and then independently designed and optimised each part, which is worthwhile to learn from this stage-by-stage research method. However, most researchers focus on optimising and designing a certain type of control algorithm when realising autonomous berthing, without considering global autonomy. For example, Nguyen [87,148] designed and optimised the fuzzy control to realise automatic berthing, but environmental factors such as the risk of collision with other vessels during the berthing process are not taken into account in his simulation. This is not to deny the innovative research on control algorithms, dynamic collision avoidance, path planning, and other technologies, but to emphasise that the realisation of autonomous berthing requires the comprehensive application of multiple technologies.
(2) During the manoeuvring process of berthing, it is seriously affected by environmental disturbance, shallow water effect, shore wall effect, and other factors, and the current research on autonomous berthing sensing for ships is relatively small. In order to reduce environmental disturbances and system instability, researchers need to use high-precision sensors such as 3D LIDAR, laser scanners, GPS, and depth cameras to acquire data. For example, Chen and his team [22] developed a berthing information extraction system based on 3D LiDAR and used a laser scanner as the detecting unit in the field experiments, the disadvantage of which is that the system is more costly and may not be applicable to all types of vessels. It can be seen that the future improvement direction of the berthing sensing system can include optimising the cost–benefit ratio of the system and enhancing its robustness under various environmental conditions. Meanwhile, the sensing system in autonomous berthing should be able to collect and process the surrounding environmental information in real time, including the specific position of nearby obstacles and docks, etc. Lu et al. [27] proposed a method to obtain the angle of offshore vessels based on LiDAR 3D point cloud data, which can only be obtained by estimation. It may be insufficient to satisfy the data required for berthing sensing in practical engineering applications. Therefore, in order to improve the accuracy and practicality of the berthing sensing system, future research needs to explore more comprehensive data processing techniques and algorithms that can combine the image recognition and analysis techniques of artificial intelligence with sensors. For example, Cao et al. [33] combined the deep learning image segmentation model with visual perception to study an assisted berthing system, which is helpful to realise autonomous berthing.
(3) Traditional single control methods often fail to meet the robustness and adaptability in complex environments required for autonomous berthing; e.g., Guo [49] realised automatic berthing by designing three fuzzy controllers. Although this research has some reference value, its performance may be limited when it encounters unforeseen situations or new environmental factors, and it cannot realise the real sense of autonomy. In order to achieve more efficient and safe autonomous berthing, ship control systems need to be optimised and integrated; e.g., if traditional control techniques are combined with artificial intelligence, by introducing reinforcement learning and deep learning algorithms, the control system can be equipped with the ability to self-learn and adapt to changes in the environment. Lee [67] eliminated the need to acquire a training dataset by adopting a reinforcement learning-based proximal policy optimisation for achieving autonomous berthing, reducing the need for training datasets and overcoming the difficulty of data acquisition by learning the optimal control strategy through trial and error. This fusion of techniques not only optimises the control strategy and improves the ability to adapt to complex environments, but also introduces intelligent decision-making support, making the operation more precise and safer. Therefore, continued research and development of this method of combining traditional and modern technologies can not only enhance the performance of autonomous berthing technology for ships, but also promote the realisation of the intelligent development of the shipping industry, and this kind of research deserves the attention and investment of all parties to realise the extensive benefits of its practical application.
(4) At present, domestic and foreign research on the performance assessment technology, relevant specifications, and theoretical methods of the intelligent ship autonomous berthing system is still in the exploratory stage, and the results of the existing assessment methods are highly subjective and lack uniformity and objectivity. In order to improve the reliability and stability of the autonomous berthing system, it is important to develop a scientific, fair, and unified berthing performance assessment system, which requires practitioners, scholars, and related organisations to strengthen cooperation and explore a more objective and scientific assessment method so as to promote the healthy and sustainable development of the smart ship industry.
6. Future Prospects
(1) To achieve the autonomous berthing of ships, the ship berthing system needs to integrate a number of technologies, such as dynamic positioning systems, local path planning, path tracking, intelligent perception, dynamic collision avoidance, etc., and use sensors, the Internet of Things, and other means to achieve the fusion and sharing of all kinds of information about the operation of the ship so that the ship’s position, speed, environmental conditions, and other key parameters can be monitored in real time. In addition, the application of artificial intelligence technologies such as machine learning for data analysis can help the system learn from past operational data, optimise the ship’s behavioural patterns, and provide auxiliary decision-making suggestions for ship operation and management. For example, AI can predict possible risks and automatically adjust the ship’s course and speed to avoid obstacles and ensure safe berthing. At the same time, with the support of shore-based systems, deeper remote monitoring and control of ships can be achieved by receiving real-time data from ships, analysing them, and sending instructions and suggestions to the ships, which not only improves the safety and efficiency of autonomous ship operations but also provides support in emergency situations.
(2) The integration and optimisation of the sensing system with the data fusion technology should be strengthened in the design of the sensing system, which can help to provide a more accurate environment sensing capability capable of real-time and accurate sensing of parameters such as berthing distance, berthing speed, berthing angle, and bow turning angular speed, in order to make a strongly adaptive and autonomous berthing decision. At the same time, the development of sensing systems can significantly improve the safety and efficiency of autonomous berthing, for example, using advanced image recognition and data analysis technologies to more accurately identify and predict changes in the environment, so as to optimise berthing paths and collision avoidance strategies. In addition, the perception system can be integrated with other ship systems, such as power and navigation systems, to form a comprehensive autonomous control system for higher levels of automation and intelligent berthing operations.
(3) Integration and innovation of traditional control with other control strategies, such as model predictive control, adaptive control, or neural network control, and other modern control technologies. This hybrid control strategy can take advantage of their respective strengths to improve the accuracy and adaptability of the overall system so as to better cope with the various challenges in the process of autonomous berthing of ships. In order to achieve autonomous berthing of ships, integration with technologies such as reinforcement learning, machine learning, deep learning, etc. is essential, and this combination of technologies can not only continuously optimise its decision-making strategy through simulation or trial-and-error processes in actual operation to achieve the best berthing effect but also predict and analyse the performance of the ship under different berthing conditions.
7. Conclusions
This paper provides a deep theoretical foundation for autonomous berthing technology by comprehensively analysing ship autonomous berthing, covering key aspects such as literature dataset analysis, perception technologies, berthing types, control methods, evaluation methods, assistive technologies, and challenges and outlooks. By comprehensively analysing the existing literature, this paper identifies the main trends in the development of autonomous berthing technology, discusses the key role of sensing technology in improving berthing accuracy and safety, summarises the current status of domestic and international research on a variety of berthing control methods, and also analyses the integrated application of various technologies in the berthing process. Finally, this paper summarises the challenges faced by the current technology and the outlook for the future development of autonomous berthing technology, so as to contribute to the development of the intelligent ship industry. As a whole, this paper provides certain reference value for the research of autonomous berthing technology for intelligent ships and has certain significance for promoting the progress of this technology.
Author Contributions
Conceptualization, G.C.; methodology, J.C. (Jiangliu Cai); software, J.C. (Jiangliu Cai) and J.Y.; validation, J.C. (Jiangliu Cai), G.C. and J.Y.; investigation, G.C. and C.D.; writing—review and editing, J.C. (Jiangliu Cai) and G.C.; data curation, J.Y. and C.D.; visualisation, G.C. and J.C. (Jiangliu Cai); diagram, J.C. (Jiangliu Cai) and J.Y.; supervision, Y.S. and J.C. (Jinhai Chen); project administration, Y.S. and J.C. (Jinhai Chen); funding acquisition, J.C. (Jinhai Chen). All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China (No. 52371369), the Key Projects of the National Key R&D Programme (No. 2021YFB390150), the Natural Science Project of Fujian Province (No. 2022J01323, 2023J01325, 2023I0019), the Science and Technology Plan Project of Fujian Province (No. 3502ZCQXT2021007), and the Funds of Fujian Province for Promoting the High Quality Development of the Marine and Fisheries Industry (No. FJHYF-ZH-2023-10).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Zhang, S.; Wu, Q.; Liu, J.; He, Y.; Li, S. State-of-the-Art Review and Future Perspectives on Maneuvering Modeling for Automatic Ship Berthing. J. Mar. Sci. Eng. 2023, 11, 1824. [Google Scholar] [CrossRef]
- Guo, F. Research on Automatic Berthing Technology for Intelligent Ships. Master’s Thesis, Dalian Maritime University, Dalian, China, 2022. [Google Scholar]
- Du, Y.Z.; Zhu, Z.J.; Xie, H.W.; Meng, F.B.; L, J. Nonlinear Model Predictive Control for Automatic Berthing of the Underactuated Twin-propeller Twin-Rudder Ship. In Proceedings of the 2021 China Automation Congress (CAC), Beijing, China, 22–24 October 2021; pp. 3543–3548. [Google Scholar]
- Chen, Z.C.; Xue, Q.M.; Luo, K.; Gao, D.J. Research on Automatic Berthing Control of Intelligent Ship Based on Improved LOS Navigation Algorithm. Navig. China 2021, 44, 126–133. [Google Scholar]
- Maniyappan, S.; Umeda, N.; Maki, A.; Akimoto, Y. Effectiveness and mechanism of broaching-to prevention using global optimal control with evolution strategy (CMA-ES). J. Mar. Sci. Technol. 2021, 26, 382–394. [Google Scholar] [CrossRef]
- Wang, S.K.; Jin, H.Z.; Meng, L.W.; Li, G.C. Optimize motion energy of AUV based on LQR control strategy. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; pp. 4615–4620. [Google Scholar]
- Kim, K.; Kim, B.; Kim, Y. A Study on the Optimal Tracking Control System Design for Automatic Ship Berthing. J. Korean Soc. Power Syst. Eng. 2018, 22, 72–80. [Google Scholar] [CrossRef]
- Kamil, A.; Allal, A.A.; Melhaoui, Y.; Mansouri, K.; Rachik, M. A comparative analysis of methods related to automatic ship berthing. In Proceedings of the 2019 5th International Conference on Optimization and Applications (ICOA), Kenitra, Morocco, 25–26 April 2019; pp. 1–4. [Google Scholar]
- Bui, V.P.; Kawai, H.; Kim, Y.B.; Lee, K.S. A ship berthing system design with four tug boats. J. Mech. Sci. Technol. 2011, 25, 1257–1264. [Google Scholar] [CrossRef]
- Lee, D.H.; Huynh, T.; Kim, Y.B.; Park, J.S. Motion Control System Design for Barge-Type Surface Ships Using Tugboats. J. Mar. Sci. Eng. 2022, 10, 1413. [Google Scholar] [CrossRef]
- Tran, V.L.; Im, N. A study on ship automatic berthing with assistance of auxiliary devices. Int. J. Nav. Arch. Ocean 2012, 4, 199–210. [Google Scholar] [CrossRef]
- Li, S.; Liu, J.; Negenborn, R.R.; Wu, Q. Automatic Docking for Underactuated Ships Based on Multi-Objective Nonlinear Model Predictive Control. IEEE Access 2020, 8, 70044–70057. [Google Scholar] [CrossRef]
- Liao, Y.L.; Zhang, M.J.; Wan, L. Serret-Frenet frame based on path following control for underactuated unmanned surface vehicles with dynamic uncertainties. J. Cent. South Univ. 2015, 22, 214–223. [Google Scholar] [CrossRef]
- Xue, Y.Z.; Clelland, D.; Lee, B.S.; Han, D.F. Automatic simulation of ship navigation. Ocean Eng. 2011, 38, 2290–2305. [Google Scholar] [CrossRef]
- Higo, Y.; Sakano, M.; Nobe, H.; Hashimoto, H. Development of trajectory-tracking maneuvering system for automatic berthing/unberthing based on double deep Q-network and experimental validation with an actual large ferry. Ocean Eng. 2023, 287, 115750. [Google Scholar] [CrossRef]
- Sawada, R.; Hirata, K.; Kitagawa, Y.; Saito, E.; Ueno, M.; Tanizawa, K.; Fukuto, J. Path following algorithm application to automatic berthing control. J. Mar. Sci. Tech-Jpn. 2021, 26, 541–554. [Google Scholar] [CrossRef]
- Li, C.; Yan, X.P.; Li, S.J.; Liu, J.L.; Ma, F. In Survey on ship autonomous docking methods: Current status and future aspects. In Proceedings of the 2020 30th International Ocean and Polar Engineering Conference (ISOPE), Shanghai, China, 11–16 October 2020; pp. 3733–3739. [Google Scholar]
- Zhang, Q.; Zhang, X.K. A Review of Research on Automatic Berthing Control for Ships. J. Dalian Marit. Univ. 2015, 3, 1–9. [Google Scholar]
- Han, D.; Chen, H.; Song, G.; Yip, T.L.; Wu, B. Mapping the landscape of ship berthing research: A bibliometric analysis and literature review over two decades. Ocean Coast. Manag. 2023, 242, 106730. [Google Scholar] [CrossRef]
- Xie, H.Q. Study of Autonomous Berthing of Ships. Master’s Thesis, Shanghai Jiao Tong University, Shanghai, China, 2020. [Google Scholar]
- Chen, B.X. An overview of the research and development of automated berthing technology. China Water Transp. 2023, 3, 93–95. [Google Scholar]
- Chen, C.; Li, Y. Ship Berthing Information Extraction System Using Three-Dimensional Light Detection and Ranging Data. J. Mar. Sci. Eng. 2021, 9, 747. [Google Scholar] [CrossRef]
- Chen, C.; Li, Y.; Wang, T. Real-time tracking and berthing aid system with occlusion handling based on LiDAR. Ocean Eng. 2023, 288, 115929. [Google Scholar] [CrossRef]
- Chen, C.; Li, Y. Real-time tracking and dynamic berthing information extraction system with 2D LiDAR data. Ocean Eng. 2023, 276, 114181. [Google Scholar] [CrossRef]
- Qi, W.T.; Ying, L.; Chen, C. Spatial state analysis of ship during berthing and unberthing process based on 3D LiDAR. Ocean Eng. 2023, 288, 116067. [Google Scholar]
- Xiong, Y.; Yu, J.J.; Mou, J.M.; Zhang, B.R.; Zhang, J.; Zhu, Q.G. Automatic berthing of ships based on data-driven control. Navig. China 2020, 43, 1–7. [Google Scholar]
- Lu, X.D.; Li, Y.; Xie, M. Preliminary study for motion pose of inshore ships based on point cloud: Estimation of ship berthing angle. Measurement 2023, 214, 112836. [Google Scholar] [CrossRef]
- Ma, S.J. Acquisition of auxiliary information of berthing ships based on shore-based LiDAR. Pearl River Water Transp. 2023, 14, 77–79. [Google Scholar]
- Wang, H.C.; Yin, Y.; Jing, Q.F.; Xiao, F.B.; Cao, Z. A berthing state estimation pipeline based on 3D point cloud scan-matching and berth line fitting. Measurement 2024, 226, 114196. [Google Scholar] [CrossRef]
- Wang, Q.Z.; Zhao, J.W. In Modeling and Error Analysis of Ship Berthing Parameters. In Proceedings of the 2018 IEEE CSAA Guidance, Navigation and Control Conference (CGNCC), Xiamen, China, 10–12 August 2018; pp. 1–5. [Google Scholar]
- Kamolov, A.; Park, S. An IoT-Based Ship Berthing Method Using a Set of Ultrasonic Sensors. Sensors 2019, 19, 5181. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.; Kim, D.; Park, B.; Lee, S. Artificial Intelligence Vision-Based Monitoring System for Ship Berthing. IEEE Access 2020, 8, 227014–227023. [Google Scholar] [CrossRef]
- Cao, Z.Y.; Liu, F.; Sun, Y.Y. An assisted berthing system based on deep learning visual perception. Mar. Electr. Electron. Technol. 2024, 44, 53–57. [Google Scholar]
- Fu, H.; Huang, Y.; Li, W. Ship berthing motion control based on improved Simulation Localization and Mapping algorithm. In Proceedings of the 2021 4th International Symposium on Traffic Transportation and Civil Architecture (ISTTCA), Suzhou, China, 12–14 November 2021; pp. 233–236. [Google Scholar]
- Volden, Ø.; Stahl, A.; Fossen, T.I. Vision-based positioning system for auto-docking of unmanned surface vehicles (USVs). Int. J. Intell. Robot. 2022, 6, 86–103. [Google Scholar] [CrossRef]
- Volden, Ø.; Stahl, A.; Fossen, T.I. Development and Experimental Validation of Visual-Inertial Navigation for Auto-Docking of Unmanned Surface Vehicles. IEEE Access 2023, 11, 45688–45710. [Google Scholar] [CrossRef]
- Xie, H.Q.; Deng, N.M. Deep learning-based 3D perception algorithm for autonomous ship berthing scenarios. Ship Sci. Technol. 2021, 43, 160–164. [Google Scholar]
- Chen, J. Research on Unmanned Ship Berthing Environment Sensing System Based on Vision and LiDAR Fusion. Master’s Thesis, Wuhan University of Technology, Wuhan, China, 2022. [Google Scholar]
- Kim, S.; Jo, H.; Kim, J.; Park, J. Development of an autonomous docking system for autonomous surface vehicles based on symbol recognition. Ocean Eng. 2023, 283, 114753. [Google Scholar] [CrossRef]
- Hu, B. LIDAR-Based Unmanned Vessel Berthing and Unberthing Information Sensing Research. Master’s Thesis, Dalian Maritime University, Dalian, China, 2022. [Google Scholar]
- Ai, S.K.B.L. Research on Monitoring and Scheduling System for Inland Waterway Vessels Based on GPS and Electronic Charts. Ship Sci. Technol. 2018, 40, 142–144. [Google Scholar]
- Lu, H.G.; Yin, Y. Unmanned Vessel Path Planning Based on Electronic Chart Vector Data Modelling. J. Transp. Inf. Saf. 2019, 37, 94–106. [Google Scholar]
- Ma, M.; Gu, N.; Dong, J.W.; Yin, Y.; Han, B.; Peng, Z.H. Unmanned Aerial Vessel Cluster Area Coverage Path Planning Based on Electronic Nautical Charts. Chin. J. Ship Res. 2024, 19, 211–219. [Google Scholar]
- Zhang, Z.J. An investigation of berthing maneuvers with a positive transverse backward blowing furling wind. Mar. Equip. Mater. Mark. 2019, 1, 39–40. [Google Scholar]
- Guo, Z.C. Analyzing the self-propelled berthing and unberthing of small and medium-sized ships. China Water Transp. 2020, 20, 1–2. [Google Scholar]
- Ahmed, Y.A.; Hasegawa, K. Automatic Ship Berthing using Artificial Neural Network Based on Virtual Window Concept in Wind Condition. IFAC Proc. Vol. 2012, 45, 286–291. [Google Scholar] [CrossRef]
- Ahmed, Y.A.; Hasegawa, K. Implementation of Automatic Ship Berthing using Artificial Neural Network for Free Running Experiment. IFAC Proc. Vol. 2013, 46, 25–30. [Google Scholar] [CrossRef]
- Jia, Y.P.; Shen, H.L.; Yin, Y.; Zhang, X.F. Neural network-based simulation of autonomous berthing of unmanned vessels. China Navig. 2021, 44, 107–111. [Google Scholar]
- Guo, F.; Yin, Y. Simulation of autonomous parallel berthing of unmanned vessel based on fuzzy control. Ship Eng. 2022, 44, 38–43. [Google Scholar]
- Yuan, S.Z.; Liu, Z.L.; Zheng, L.H.; Zheng, Y.X. An event-triggered adaptive time-domain MPC-based approach to ship berthing. Control Decis. 2024, 39, 336–344. [Google Scholar]
- Gjarum, V.B.; Rorvik, E.H.; Lekkas, A.M. In Approximating a deep reinforcement learning docking agent using linear model trees. In Proceedings of the 2021 European Control Conference (ECC), Delft, The Netherlands, 29 June–2 July 2021; pp. 1465–1471. [Google Scholar]
- Im, N.; Nguyen, V. Artificial neural network controller for automatic ship berthing using head-up coordinate system. Int. J. Nav. Arch. Ocean 2018, 10, 235–249. [Google Scholar] [CrossRef]
- Ahmed, Y.A.; Hannan, M.A.; Siang, K.H. Artificial Neural Network controller for automatic ship berthing: Challenges and opportunities. Mar. Syst. Ocean Technol. 2020, 15, 217–242. [Google Scholar] [CrossRef]
- Pang, X.B. Analysis of safety factors for berthing of mega ships. Tianjin Navig. 2019, 4, 26–28. [Google Scholar]
- Bai, X.; Liu, D.; Xu, X.; Xiao, Y. Experimental Study of A New Method for Berthing and Disembarking Large Cruise Ships. In Proceedings of the 2021 3rd International Academic Exchange Conference on Science and Technology Innovation (IAECST), Guangzhou, China, 10–12 December 2021; pp. 1275–1282. [Google Scholar]
- Bui, V.P.; Kim, Y.B. Development of Constrained Control Allocation for Ship Berthing by Using Autonomous Tugboats. Int. J. Control Autom. 2011, 9, 1203–1208. [Google Scholar]
- Shuai, Y.H.; Li, G.Y.; Cheng, X.; Skulstad, R.; Xu, J.S.; Liu, H.H.; Zhang, H.X. An efficient neural-network based approach to automatic ship docking. Ocean Eng. 2019, 191, 106514. [Google Scholar] [CrossRef]
- Wang, X.W. Research on Automatic Berthing Motion Control for Large Ships. Master’s Thesis, Wuhan University of Technology, Wuhan, China, 2020. [Google Scholar]
- Jia, Y.P.; Yin, Y.; Zhu, Z.X. Simulation Study on Autonomous Berthing of Unmanned Vessel Based on Berth Coordinates. J. Syst. Simul. 2020, 32, 1910–1917. [Google Scholar]
- Shimizu, S.; Nishihara, K.; Miyauchi, Y.; Wakita, K.; Suyama, R.; Maki, A.; Shirakawa, S. Automatic berthing using supervised learning and reinforcement learning. Ocean Eng. 2022, 265, 112553. [Google Scholar] [CrossRef]
- Li, R.Z. Research on Unmanned Surface Vessel Trajectory Tracking Control Technology Based on Model Predictive Control. Master’s Thesis, Shanghai Ocean University, Shanghai, China, 2022. [Google Scholar]
- Fan, C.; Wróbel, K.; Montewka, J.; Gil, M.; Wan, C.; Zhang, D. A framework to identify factors influencing navigational risk for Maritime Autonomous Surface Ships. Ocean Eng. 2020, 202, 107188. [Google Scholar] [CrossRef]
- Qu, Z.Y. Research on Automatic Berthing Method of Intelligent Ship. Int. Core J. Eng. 2021, 7, 419–424. [Google Scholar]
- Zhang, Q.; Zhang, X.K.; Lin, N.J. Simple Nonlinear Neural Network Controller for Automatic Ship Berthing. Navig. China 2017, 40, 11–15. [Google Scholar]
- Nguyen, V.; Do, V.; Im, N. Development of Automatic Ship Berthing System Using Artificial Neural Network and Distance Measurement System. Int. J. Fuzzy Log. Inte 2018, 18, 41–49. [Google Scholar] [CrossRef]
- Nguyen, V. A Review of automatic berthing systems based on artificial networks for marine ship. Int. J. Civ. Eng. Technol. 2019, 10, 763–769. [Google Scholar]
- Lee, D. Reinforcement Learning-Based Automatic Berthing System. arXiv 2021, arXiv:2112.01879. [Google Scholar]
- Zhang, M.J. Study of Nonlinear Automatic Berthing Control for Underactuated Surface Vessels. Master’s Thesis, Shandong Jiaotong University, Shandong, China, 2021. [Google Scholar]
- Zhao, Y.S.; Wu, T.; Bai, Y.M. Automatic berthing control of ships under unknown time-varying perturbations and dynamic uncertainty of model parameters. J. Shanghai Marit. Univ. 2022, 43, 8–13. [Google Scholar]
- Kamil, A.; Melhaoui, Y.; Mansouri, K.; Rachik, M. Artificial neural network and mathematical modeling of automatic ship berthing. Commun. Math. Biol. Neu 2022, 22, 113. [Google Scholar]
- Wang, K.; Hua, Y.; Huang, L.Z.; Guo, X.; Liu, X.; Ma, Z.M.; Ma, R.Q.; Jiang, X.L. A novel GA-LSTM-based prediction method of ship energy usage based on the characteristics analysis of operational data. Energy 2023, 282, 128910. [Google Scholar] [CrossRef]
- Mizuno, N.; Kuroda, M.; Okazaki, T.; Ohtsu, K. Minimum time ship maneuvering method using neural network and nonlinear model predictive compensator. Control Eng. Pract. 2007, 15, 757–765. [Google Scholar] [CrossRef]
- Okazaki, T.; Ohtsu, K. In A study on ship berthing support system—Minimum time berthing control. In Proceedings of the 2008 IEEE International Conference on Systems, Man and Cybernetics, Singapore, 12–15 October 2008; pp. 1522–1527. [Google Scholar]
- Mizuno, N.; Kakami, H.; Okazaki, T. Parallel Simulation Based Predictive Control Scheme with Application to Approaching Control for Automatic Berthing. IFAC Proc. Vol. 2012, 45, 19–24. [Google Scholar] [CrossRef]
- Mizuno, N.; Uchida, Y.; Okazaki, T. Quasi Real-Time Optimal Control Scheme for Automatic Berthing. IFAC-PapersOnLine 2015, 48, 305–312. [Google Scholar] [CrossRef]
- Mizuno, N.; Kuboshima, R. Implementation and Evaluation of Non-linear Optimal Feedback Control for Ship’s Automatic Berthing by Recurrent Neural Network. IFAC-PapersOnLine 2019, 52, 91–96. [Google Scholar] [CrossRef]
- Mizuno, N.; Koide, T. Application of Reinforcement Learning to Generate Non-linear Optimal Feedback Controller for Ship’s Automatic Berthing System. IFAC-PapersOnLine 2023, 56, 162–168. [Google Scholar] [CrossRef]
- Bui, V.P.A.J. Optimal Control Design for Automatic Ship Berthing by Using Bow and Stern Thrusters. J. Ocean Eng. Technol. 2010, 24, 10–17. [Google Scholar]
- Kayano, J.; Okazaki, T. In A Study on the Ship’s Automatic Berthing Maneuver Using Real-Time Estimation. In Proceedings of the 2020 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Toronto, ON, Canada,, 11–14 October 2020; pp. 1791–1795. [Google Scholar]
- Wang, S.; Sun, Z.; Yuan, Q.; Sun, Z.; Wu, Z.; Hsieh, T. Autonomous piloting and berthing based on Long Short Time Memory neural networks and nonlinear model predictive control algorithm. Ocean Eng. 2022, 264, 112269. [Google Scholar] [CrossRef]
- Han, X.; Zhang, X.K. Tracking control of ship at sea based on MPC with virtual ship bunch under Frenet frame. Ocean Eng. 2022, 247, 110737. [Google Scholar] [CrossRef]
- Esmailian, E.; Farzanegan, B.; Malekizadeh, H.; Ghassemi, H.; Ardestani, M.; Menhaj, M. Control System Design for a Surface Effect Ship by Linear-Quadratic Regulator Method. Nashriyyah-I Muhandisī-I Daryā (Online) 2017, 13, 47–56. [Google Scholar]
- Tian, T. Research on rudder deceleration control system based on robust optimal control. Master’s Thesis, Harbin Engineering University, Harbin, China, 2021. [Google Scholar]
- Rachman, D.M.; Maki, A.; Miyauchi, Y.; Umeda, N. Warm-started semionline trajectory planner for ship’s automatic docking (berthing). Ocean Eng. 2022, 252, 111127. [Google Scholar] [CrossRef]
- Zhu, S.F.; Li, X.Y.; Qu, X.Y.; Liu, Q.; Li, Z.R. LQR Optimal Control of Four-steering Vehicle Based on Particle Swarm Optimization Algorithm. In Proceedings of the 2022 2nd International Conference on Control and Intelligent Robotics, New York, NY, USA, 14 October 2022; pp. 740–745. [Google Scholar]
- Zhang, W.B. Research on Autonomous Berthing Methods for Underactuated Unmanned Aerial Vessels. Master’s Thesis, Harbin Engineering University, Harbin, China, 2017. [Google Scholar]
- Nguyen, V.; Im, N. Automatic Ship Berthing Based on Fuzzy Logic. Int. J. Fuzzy Log. Inte 2019, 19, 163–171. [Google Scholar] [CrossRef]
- Sun, T.; Yin, Y.; Liu, C. Integrated trajectory planning into automatic berthing control of underactuated ship based on fuzzy-backstepping method. Ocean Eng. 2024, 291, 116336. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhu, G.B.; Hu, X. Adaptive neural network auto-berthing control of marine ships. Ocean Eng. 2019, 177, 40–48. [Google Scholar] [CrossRef]
- Xu, H.X.; Zhu, M.F.; Yu, W.Z.; Han, X. Robust adaptive control of automatic berthing for smart ships. J. Huazhong Univ. Sci. Technol. (Nat. Sci. Ed.) 2020, 48, 25–29. [Google Scholar]
- Wang, L.; Li, S.; Liu, J.; Negenborn, R. Ship docking and undocking control with adaptive-mutation beetle swarm prediction algorithm. Ocean Eng. 2022, 251, 111021. [Google Scholar] [CrossRef]
- Liu, Y.; Im, N.; Zhang, Q.; Zhu, G. Adaptive Auto-Berthing Control of Underactuated Vessel Based on Barrier Lyapunov Function. J. Mar. Sci. Eng. 2022, 10, 279. [Google Scholar] [CrossRef]
- Bu, R.X.; Liu, Z.J.; Hu, J.Q. Non-linear sliding mode berthing controller for underdriven ships. J. Traffic Transp. Eng. 2007, 7, 24–29. [Google Scholar]
- Po, Z.J. Research on Automatic Berthing Control for Unmanned Surface Vessels. Ph.D. Thesis, Dalian Maritime University, Dalian, China, 2020. [Google Scholar]
- Zou, T.; Shen, Z.; Dai, C. In Adaptive Iterative Sliding Mode Berthing Control for Underactuated Ship Based on Chaotic Particle Swarm. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 2881–2886. [Google Scholar]
- Xu, Z.; Galeazzi, R. Guidance and Motion Control for Automated Berthing of Twin-waterjet Propelled Vessels. IFAC-PapersOnLine 2022, 55, 58–63. [Google Scholar] [CrossRef]
- Zhu, X.N. Research on Autonomous Berthing Technology for Unmanned Surface Vessels. Master’s Thesis, Jiangsu University of Science and Technology, Zhenjiang, China, 2022. [Google Scholar]
- Zhang, X.K.; Xiao, W.C.; Guo, C. Vessel heading maintained at low speeds in and out of harbour. J. Traffic Transp. Eng. 2005, 5, 77–81. [Google Scholar]
- Zhang, X.K.; Zhang, G.Q. Simple Robust Control of Ship Turning Maneuvers in Harbor. Navig. China 2014, 37, 31–34. [Google Scholar]
- Piao, Z.J.; Chen, G.; Sun, S. Research into the Automatic Berthing of Underactuated Unmanned Ships under Wind Loads Based on Experiment and Numerical Analysis. J. Mar. Sci. Eng. 2019, 7, 300. [Google Scholar] [CrossRef]
- Liu, Q.; Li, T.; Shan, Q.; Yu, R.; Gao, X. Virtual guide automatic berthing control of marine ships based on heuristic dynamic programming iteration method. Neurocomputing 2021, 437, 289–299. [Google Scholar] [CrossRef]
- Akimoto, Y.; Miyauchi, Y.; Maki, A. Saddle Point Optimization with Approximate Minimization Oracle and Its Application to Robust Berthing Control. Acm Trans. Evol. Learn. Optim. 2022, 2, 1–32. [Google Scholar] [CrossRef]
- Maki, A.; Sakamoto, N.; Akimoto, Y.; Nishikawa, H.; Umeda, N. Application of optimal control theory based on the evolution strategy (CMA-ES) to automatic berthing. J. Mar. Sci. Tech-Jpn. 2020, 25, 221–233. [Google Scholar] [CrossRef]
- Maki, A.; Sakamoto, N.; Akimoto, Y.; Banno, Y.; Maniyappan, S.; Umeda, N. On broaching-to prevention using optimal control theory with evolution strategy (CMA-ES). J. Mar. Sci. Tech-Jpn. 2021, 26, 71–87. [Google Scholar] [CrossRef]
- Maki, A.; Akimoto, Y.; Naoya, U. Application of optimal control theory based on the evolution strategy (CMA-ES) to automatic berthing (part: 2). J. Mar. Sci. Tech-Jpn. 2021, 26, 835–845. [Google Scholar] [CrossRef]
- Sun, Q.; Yin, W.H. Research on berthing technology for large ships based on tugboat autonomous co-operation. Shipbuild. China 2023, 64, 176–185. [Google Scholar]
- Li, R.L. Research on Autonomous Berthing Methods for Large Ships. Master’s Thesis, Dalian Maritime University, Dalian, China, 2012. [Google Scholar]
- Vu, M.T.; Choi, H.; Oh, J.; Jeong, S. A Study on Automatic Berthing Control of an Unmanned Surface Vehicle. J. Adv. Res. Ocean Eng. 2016, 2, 192–201. [Google Scholar] [CrossRef]
- Roubos, A.; Groenewegen, L.; Peters, D.J. Berthing velocity of large seagoing vessels in the port of Rotterdam. Mar. Struct. 2017, 51, 202–219. [Google Scholar] [CrossRef]
- Yang, K.U.; Hur, J.G.; Choi, M.S.; Yeo, D.J.; Byun, J.H. Study on ship automatic berthing system with mooring lines. China Ocean Eng. 2017, 31, 19–29. [Google Scholar] [CrossRef]
- Liu, X.Z. Research on Automatic Berthing Control of Ships Based on Optimal Trajectory Planning. Master’s Thesis, Dalian Maritime University, Dalian, China, 2020. [Google Scholar]
- Meyer, P.; Yin, H.; Brodtkorb, A.H.; Arcak, M.; Sørensen, A. Continuous and discrete abstractions for planning, applied to ship docking. IFAC-PapersOnLine 2020, 53, 1831–1836. [Google Scholar] [CrossRef]
- Wu, G.; Zhao, X.; Wang, L. Modeling and Simulation of Automatic Berthing based on Bow and Stern Thruster Assist for Unmanned Surface Vehicle. J. Mar. Sci. 2021, 3, 16–21. [Google Scholar] [CrossRef]
- Xiao, G.Q.; Tong, C.; Wang, Y.; Guan, S.S.; Hong, X.B.; Shang, B. CFD Simulation of the Safety of Unmanned Ship Berthing under the Influence of Various Factors. Appl. Sci. 2021, 11, 7102. [Google Scholar] [CrossRef]
- Wang, Y.B.; Wang, J.H.; Zheng, X.; Feng, J.; Jiang, H.Y.; Wang, Z.Y. Autonomous berthing method for unmanned aerial vessel based on berth waterfront line detection. Ship Eng. 2022, 44, 30–37. [Google Scholar]
- Lee, C.; Kim, J. Trajectory Optimization for Autonomous Berthing of a Twin-Propeller Twin-Rudder Ship. J. Ocean Eng. Technol. 2023, 37, 122–128. [Google Scholar] [CrossRef]
- Wakita, K.; Akimoto, Y.; Rachman, D.M.; Miyauchi, Y.; Maki, A. Collision probability reduction method for tracking control in automatic docking/berthing using reinforcement learning. J. Mar. Sci. Technol. 2023, 28, 844–861. [Google Scholar] [CrossRef]
- Xue, H.; Ou, Y.J. A novel asymmetric barrier Lyapunov function-based fixed-time ship berthing control under multiple state constraints. Ocean Eng. 2023, 281, 114756. [Google Scholar] [CrossRef]
- Yang, L.; Xu, H.X.; Yu, W.Z. Zero-space based self-immune control allocation for autonomous berthing of ships. Chin. J. Ship Res. 2024, 1, 128–136. [Google Scholar]
- Fang, C.; Yin, J.G.; Ren, H. Evaluation Model of Ship Berthing Behavior Based on AIS Data. IEEE Open J. Intell. Transp. Syst. 2021, 3, 104–110. [Google Scholar] [CrossRef]
- Yin, B.; Yang, L.J. Research on the evaluation method of ship berthing maneuver touchdown risk. China Water Transp. 2011, 11, 21–86. [Google Scholar]
- Xue, M.F.; Fang, X.W.; Ren, H.X. Ship berthing maneuver assessment model. China Navig. 2013, 36, 46–49. [Google Scholar]
- Chen, J.B.; Tang, Y.; Xiao, Y.J. Intelligent Evaluation of Ship Berthing Maneuvers Based on GA-BP Model. China Navig. 2016, 39, 64–68. [Google Scholar]
- Jiang, C.X. Evaluation Study of Ship Berthing Maneuver Based on EWM-TOPSIS. Master’s Thesis, Jimei University, Xiamen, China, 2022. [Google Scholar]
- Zhang, X.Y. Research on the Performance Evaluation Method of Automatic Berthing System for Intelligent Ships. Master’s Thesis, Dalian Maritime University, Dalian, China, 2023. [Google Scholar]
- Zhang, Q.; Bai, X.; Zhang, H.H.; Yang, L.; Li, Y.Z.; Zhang, S. Evaluation method of berthing and unberthing function of autonomous ships based on combined weights. Shipbuild. China 2023, 64, 127–139. [Google Scholar]
- Lin, B.W.; Zheng, M.; Chu, X.M.; Zhang, M.Y.; Mao, W.G.; Wu, D. A novel method for the evaluation of ship berthing risk using AIS data. Ocean Eng. 2024, 293, 116595. [Google Scholar] [CrossRef]
- Jia, Z.H. Autonomous Berthing Method for Unmanned Aerial Vessel in Dynamic Congested Environments. Master’s Thesis, Harbin Engineering University, Harbin, China, 2019. [Google Scholar]
- Qiu, K. Research on Autonomous Collision Avoidance Methods for Unmanned Surface Vessels. Master’s Thesis, Jiangsu University of Science and Technology, Zhenjiang, China, 2022. [Google Scholar]
- Xie, S.; Chu, X.M.; Zheng, M.; Liu, C.G. Ship predictive collision avoidance method based on an improved beetle antennae search algorithm. Ocean Eng. 2019, 192, 106542. [Google Scholar] [CrossRef]
- Miyauchi, Y.; Sawada, R.; Akimoto, Y.; Umeda, N.; Maki, A. Optimization on planning of trajectory and control of autonomous berthing and unberthing for the realistic port geometry. Ocean Eng. 2022, 245, 110390. [Google Scholar] [CrossRef]
- Miyauchi, Y.; Maki, A.; Umeda, N.; Rachman, D.; Akimoto, Y. System parameter exploration of ship maneuvering model for automatic docking/berthing using CMA-ES. J. Mar. Sci. Technol. 2022, 27, 1065–1083. [Google Scholar] [CrossRef]
- Miyauchi, Y.; Akimoto, Y.; Umeda, N.; Maki, A. Development of a Mathematical Model for Harbor-Maneuvers to Realize Modeling Automation. arXiv 2023, arXiv:2302.10459. [Google Scholar]
- Song, F.F.; Yang, X.F.; Xiang, Z.R. Autonomous Berthing of Unmanned Surface Vehicles Based on Improved Dubins-RRT Algorithm and Non-Singular Terminal Sliding Mode Control. IEEE Access 2023, 11, 43159–43168. [Google Scholar] [CrossRef]
- Zhao, J.R. Research on Autonomous Berthing Control and Guidance Technology for Small Unmanned Surface Vessels. Master’s Thesis, China Academy of Launch Vehicle Technology, Beijing, China, 2021. [Google Scholar]
- Han, S.; Wang, Y.; Wang, L.; He, H. Automatic berthing for an underactuated unmanned surface vehicle: A real-time motion planning approach. Ocean Eng. 2021, 235, 109352. [Google Scholar] [CrossRef]
- Wang, K.; Guo, X.; Zhao, J.H.; Ma, R.Q.; Huang, L.Z.; Tian, F.; Dong, S.Y.; Zhang, P.; Liu, C.L.; Wang, Z. An integrated collaborative decision-making method for optimizing energy consumption of sail-assisted ships towards low-carbon shipping. Ocean Eng. 2022, 266, 112810. [Google Scholar] [CrossRef]
- Hu, Z.H.; Yang, Z.H.; Zhang, W.D. Ship Approach and Berthing Path Planning Algorithm Based on Hybrid A* Search and Bessel Curve. Chin. J. Ship Res. 2024, 19, 220–229. [Google Scholar]
- Xu, D.; Liao, Y.L.; Pang, Y.J. In Backstepping control method for the path following for the underactuated surface vehicles. In Proceedings of the 32nd Chinese Control Conference, Xi’an, China, 26–28 July 2013; pp. 4188–4193. [Google Scholar]
- Yuan, S.Z.; Liu, Z.L.; Sun, Y.X.; Wang, Z.X.; Zheng, L.H. An event-triggered trajectory planning and tracking scheme for automatic berthing of unmanned surface vessel. Ocean Eng. 2023, 273, 113964. [Google Scholar] [CrossRef]
- Shen, Z.P.; Dai, C.S.; Zhang, N. Adaptive iterative sliding mode trajectory tracking control for underactuated ships. J. Traffic Transp. Eng. 2017, 17, 125–134. [Google Scholar]
- Wang, J.Q. Study on Ship Path Keeping and Tracking Control in Restricted Waters. Ph.D. Thesis, Shanghai Jiao Tong University, Shanghai, China, 2019. [Google Scholar]
- Ye, H.; Wu, S.; Liu, W.; Yang, X.; Du, Z.; Xue, W. Adaptive neural synergetic heading control for USVs with unknown dynamics and disturbances. Ocean Eng. 2024, 300, 117438. [Google Scholar] [CrossRef]
- Sivaraj, S.; Rajendran, S.; Prasad, L.P. Data driven control based on Deep Q-Network algorithm for heading control and path following of a ship in calm water and waves. Ocean Eng. 2022, 259, 111802. [Google Scholar] [CrossRef]
- Jiang, Q.Q.; Li, Y.; Liao, Y.L.; Miao, Y.G.; Jiang, W.; Wu, H.W. Information fusion model-free adaptive control algorithm and unmanned surface vehicle heading control. Appl. Ocean Res. 2019, 90, 101851. [Google Scholar] [CrossRef]
- Jin, Z.J.; Si, C.S.; Qiu, G.Y.; Xia, X. Research on FDLQR-based transverse rocking control of jet rudder ship heading. Ship Sci. Technol. 2020, 42, 74–81. [Google Scholar]
- Choi, J.H.; Jang, J.Y.; Woo, J. A Review of Autonomous Tugboat Operations for Efficient and Safe Ship Berthing. J. Mar. Sci. Eng. 2023, 11, 1155. [Google Scholar] [CrossRef]
- Nguyen, V.S. Investigation on a Novel Support System for Automatic Ship Berthing in Marine Practice. J. Mar. Sci. Eng. 2019, 7, 114. [Google Scholar] [CrossRef]
- Lin, A.H.; Zeng, J.P. Formation control method for multiple tugs assisting large vessels to berth. J. Xiamen Univ. (Nat. Sci.) 2019, 58, 97–103. [Google Scholar]
- Liu, J.L.; Dong, Z.L.; Li, S.J.; You, X.; Hu, Y.J. Autonomous berthing control of tugboat based on improved backstepping sliding mode control algorithm. Chin. J. Ship Res. 2024, 19, 119–127. [Google Scholar]
- Jiang, X.; Zhu, Y.; Wang, L.; Wang, Y. Cooperative control for automatic towing operation by multiple DP tugboats with fully unknown model parameters. J. Ocean Eng. Sci. 2023; in press. [Google Scholar] [CrossRef]
- Huang, Y.S. Research on Autonomous Mooring Measurement and Control Technology for Omnidirectional Propulsion of Unmanned Aerial Vessels. Master’s Thesis, South China University Of Technology, Guangzhou, China, 2020. [Google Scholar]
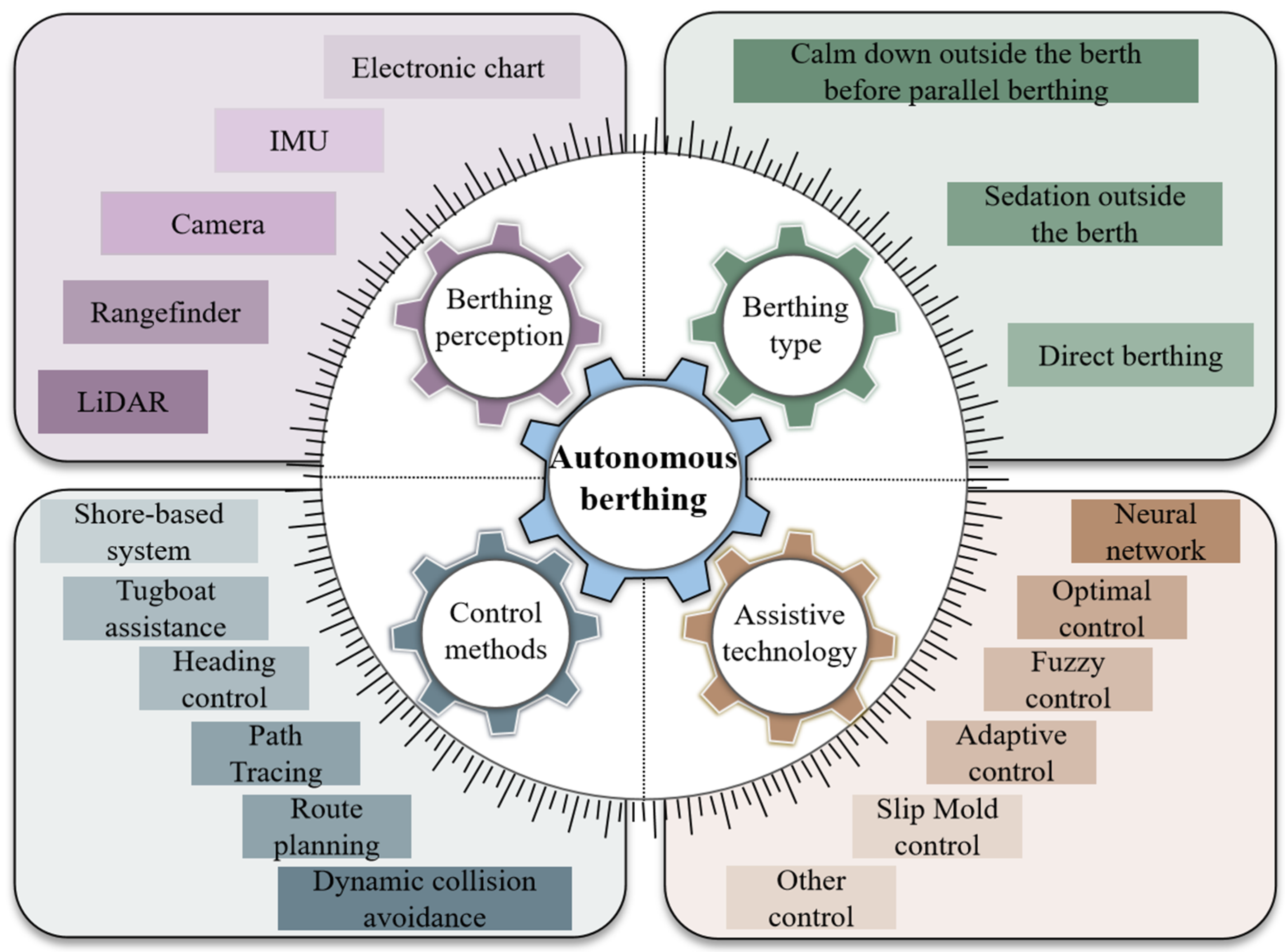
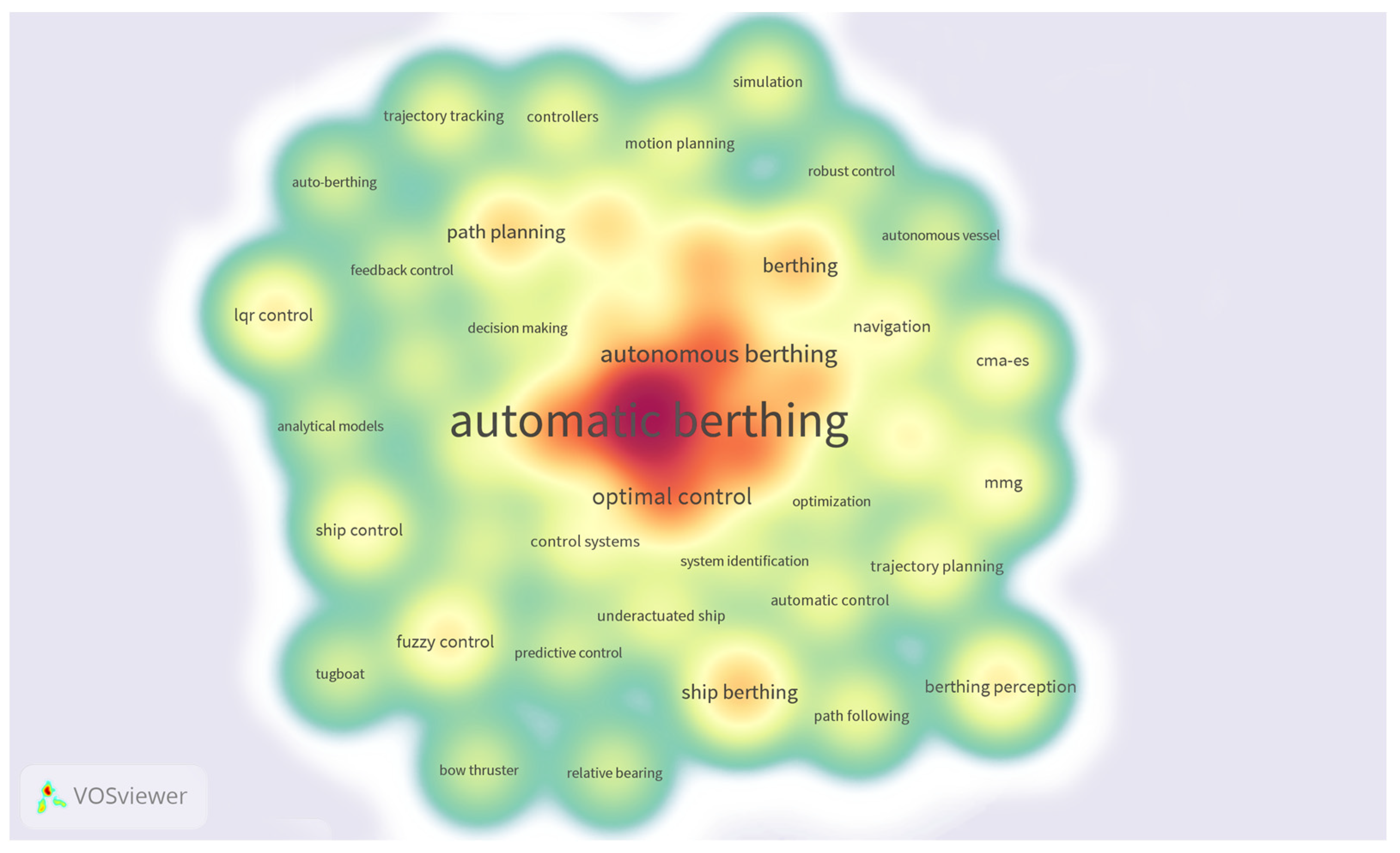

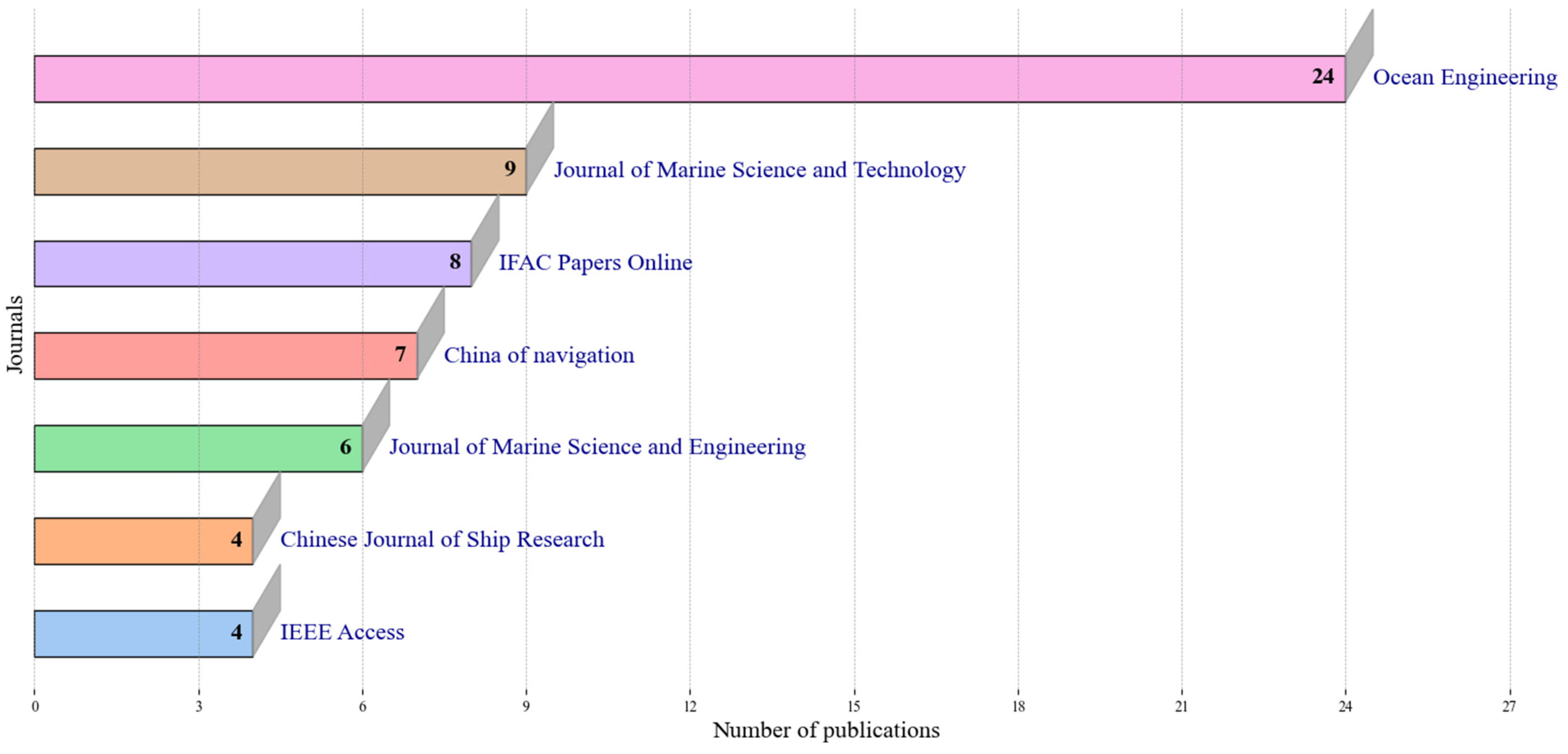
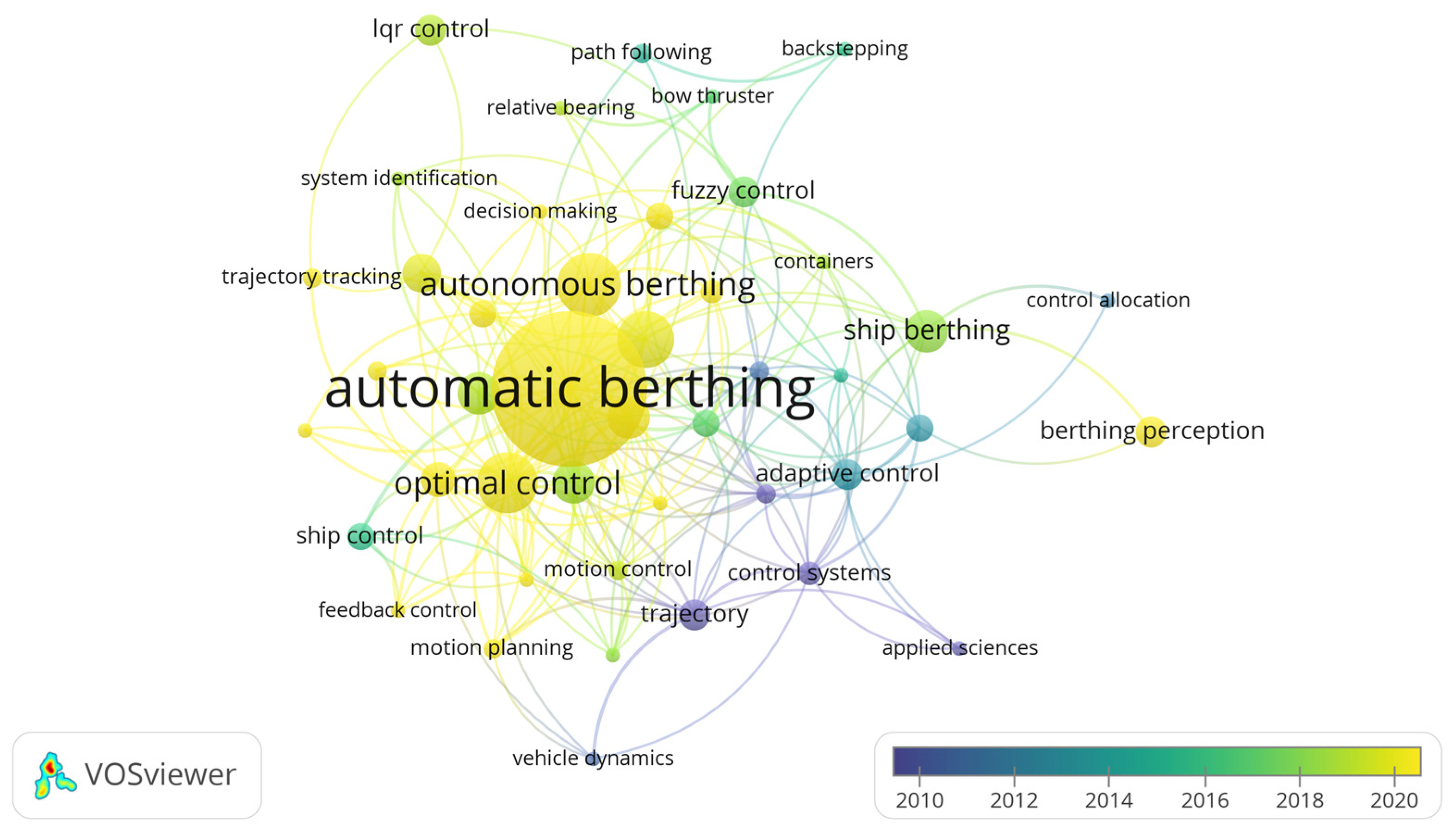
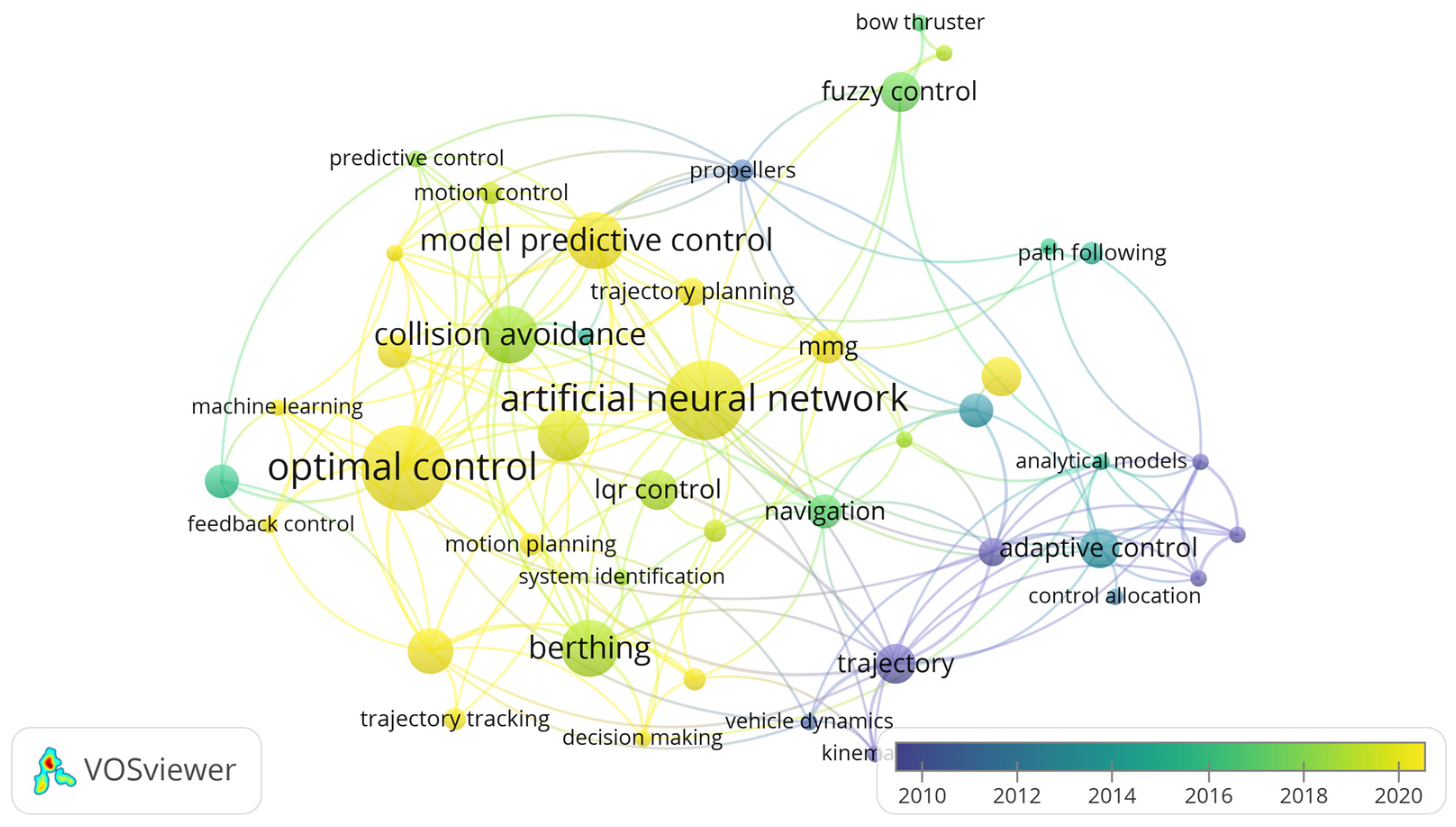
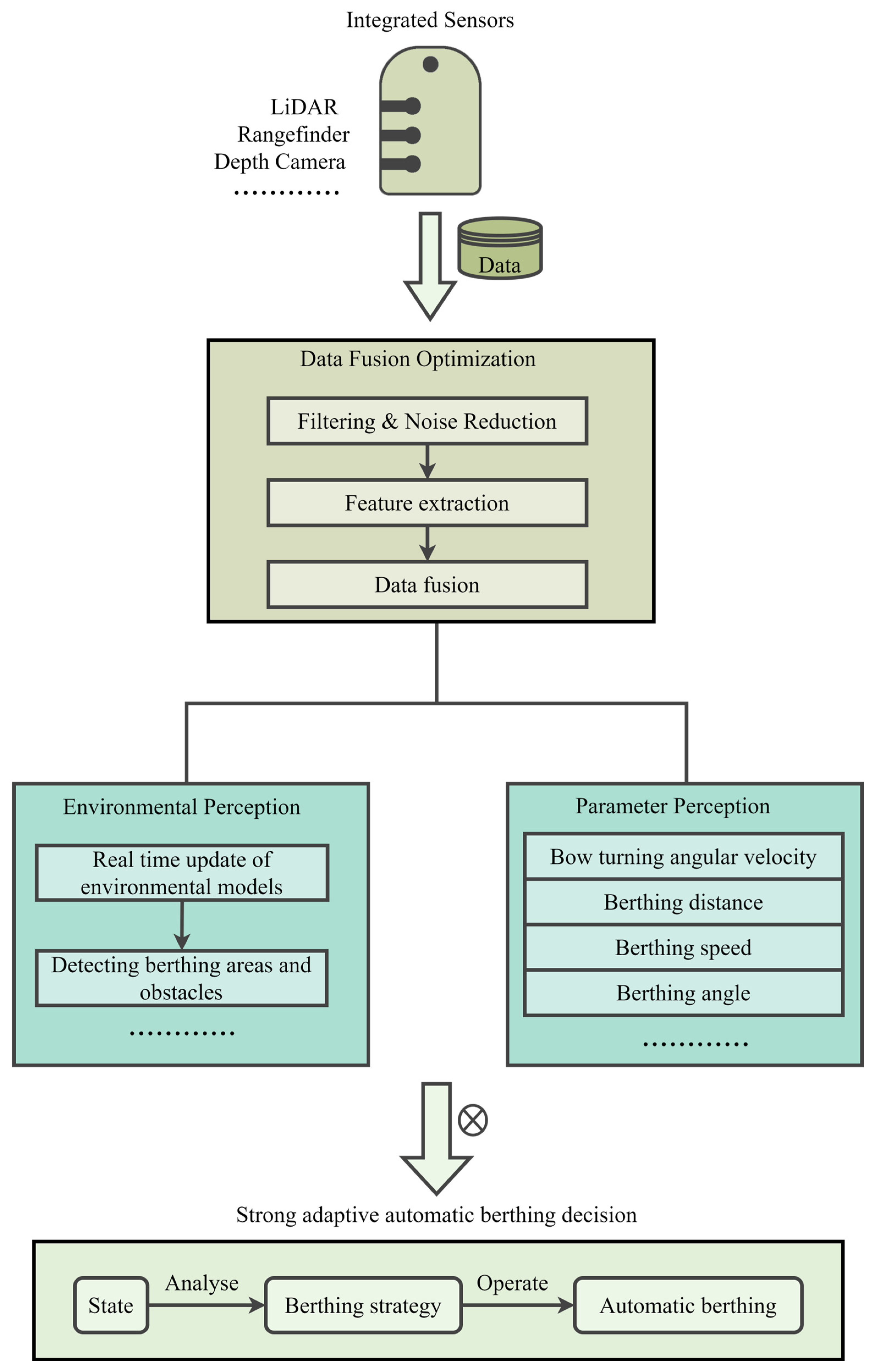
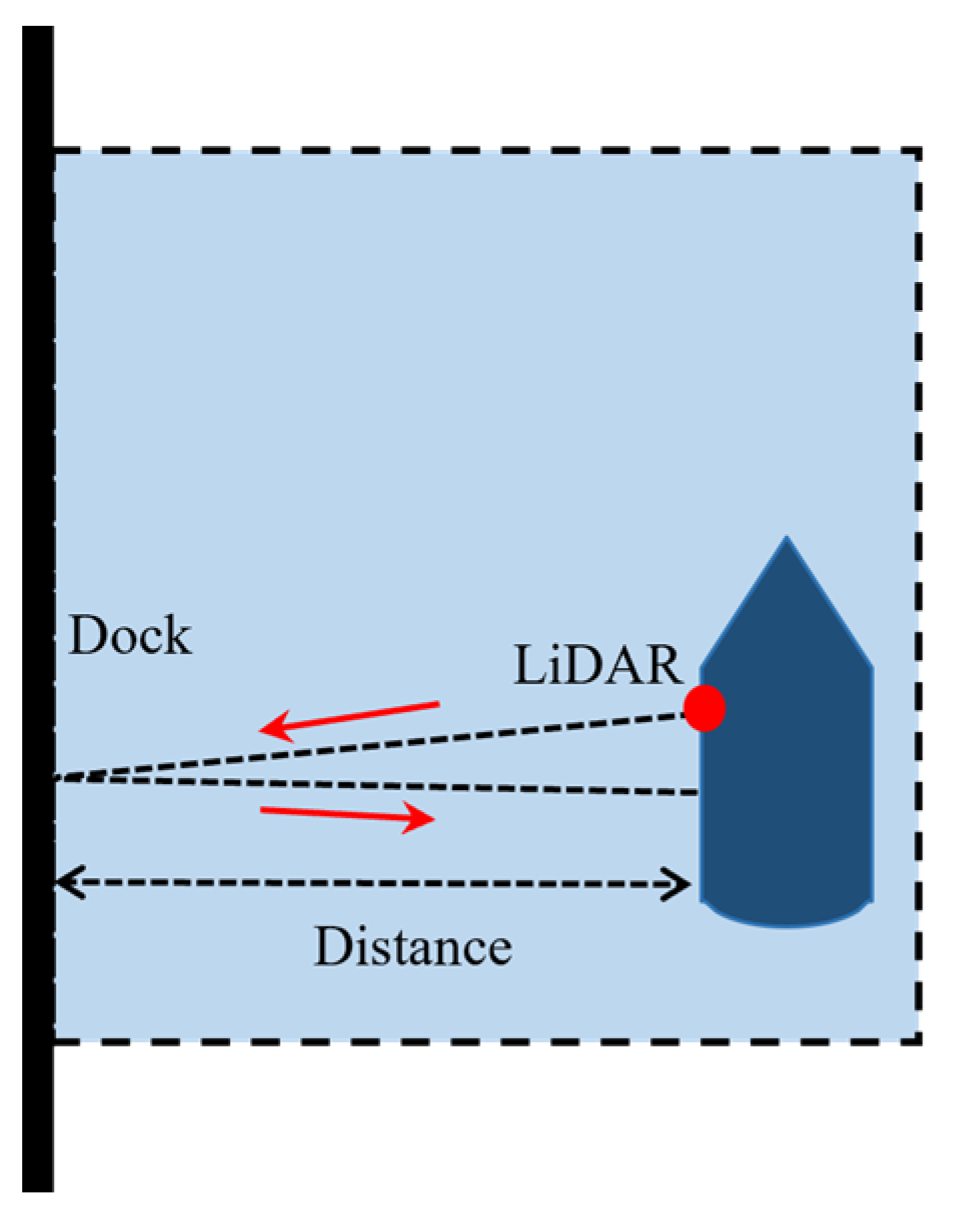

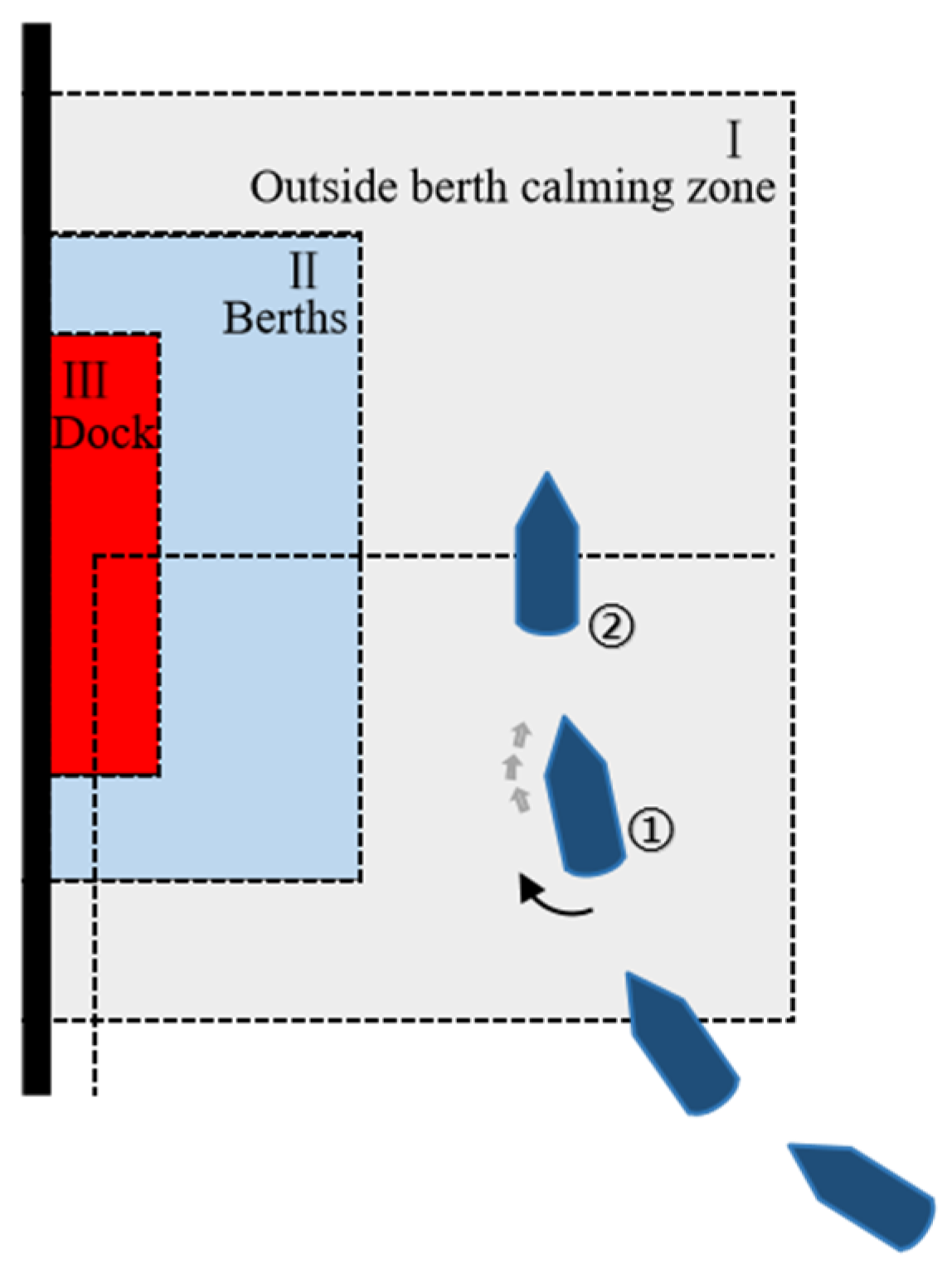
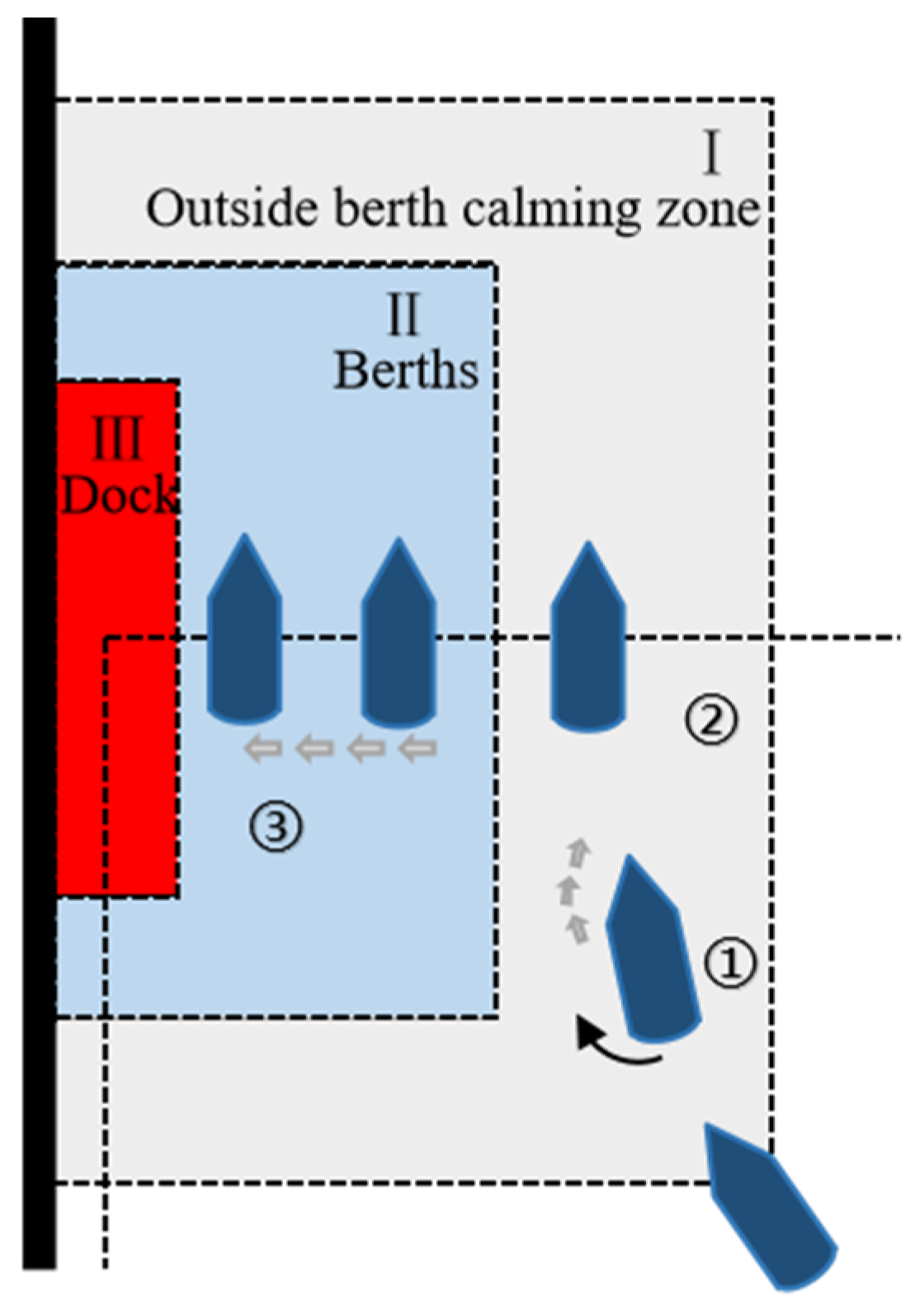
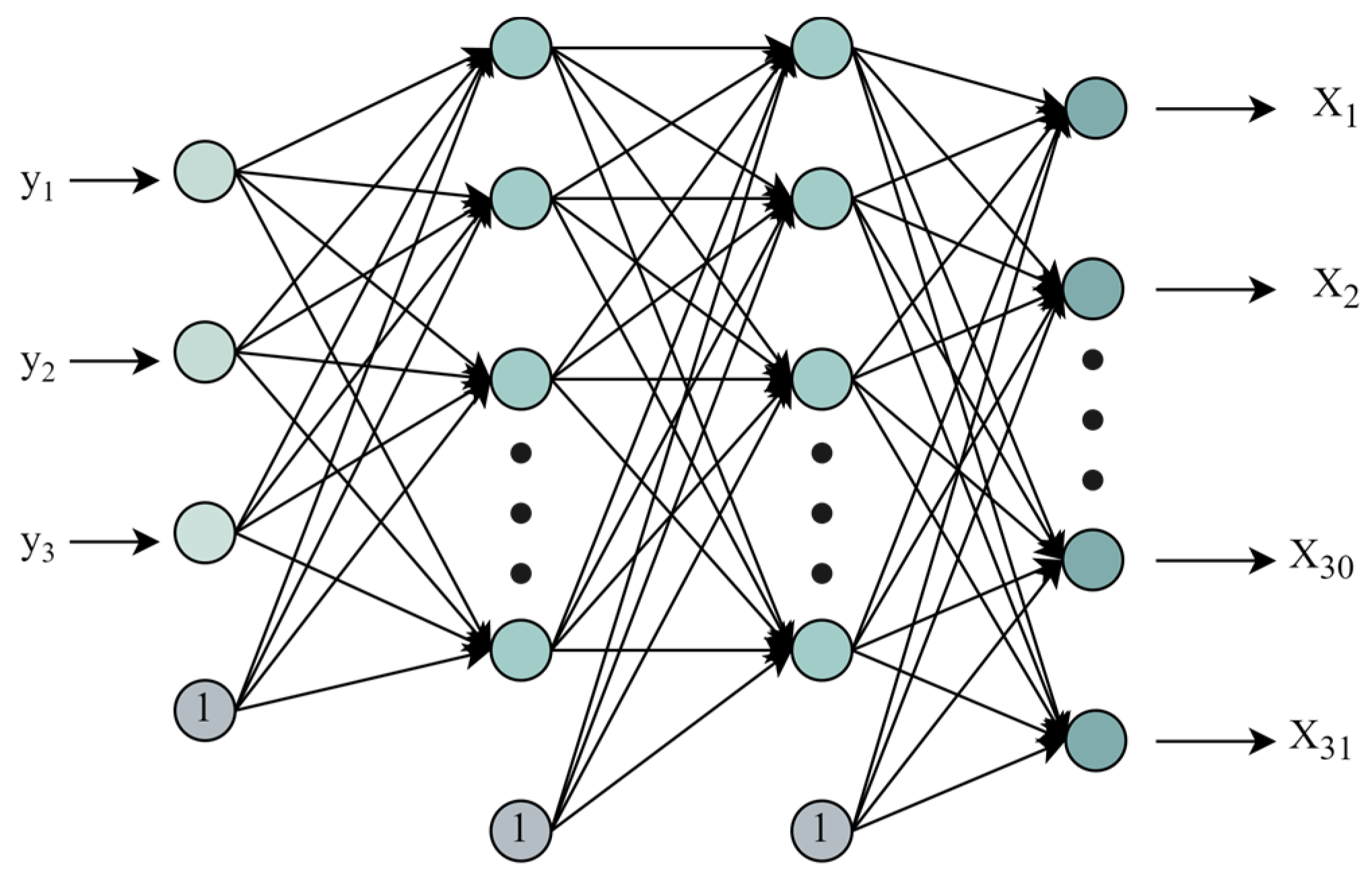
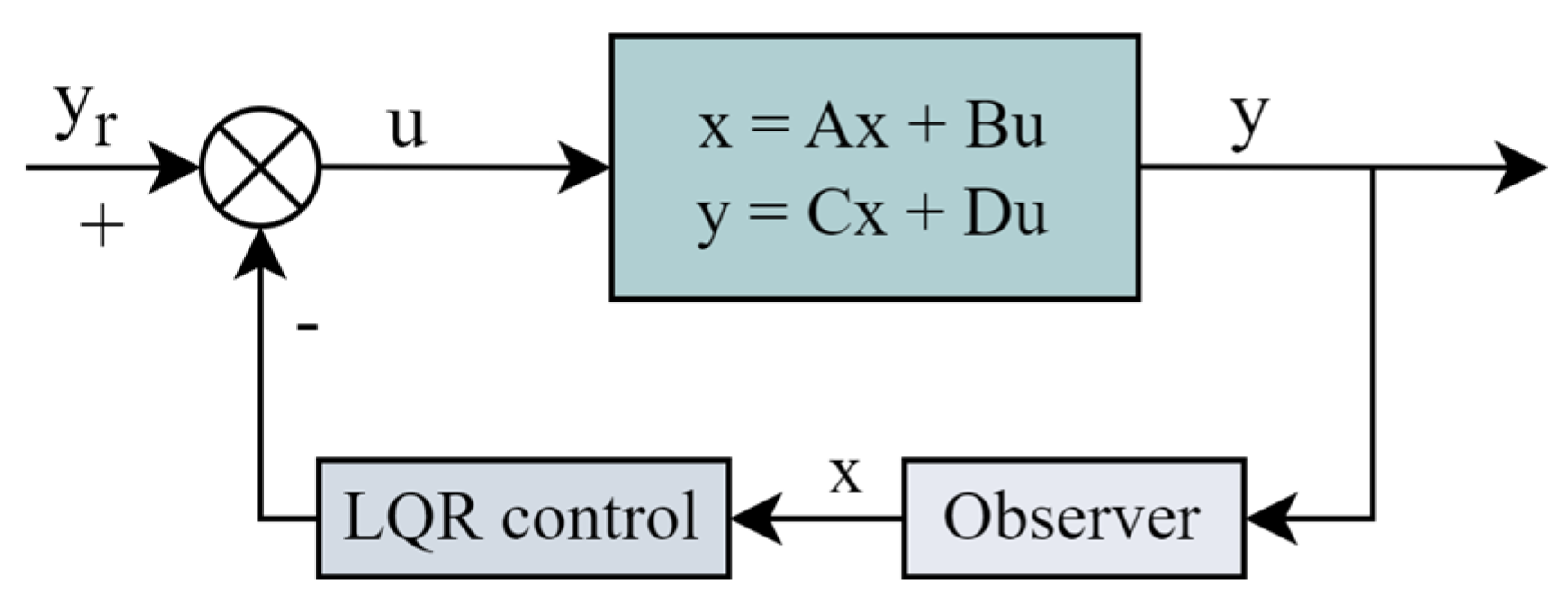
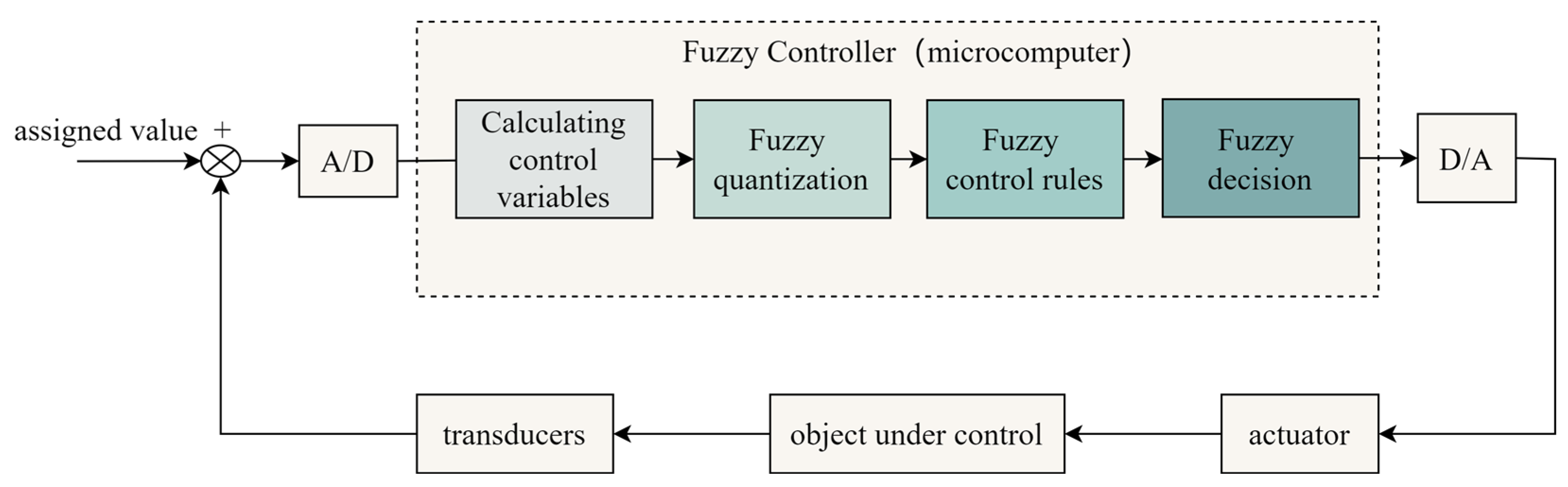
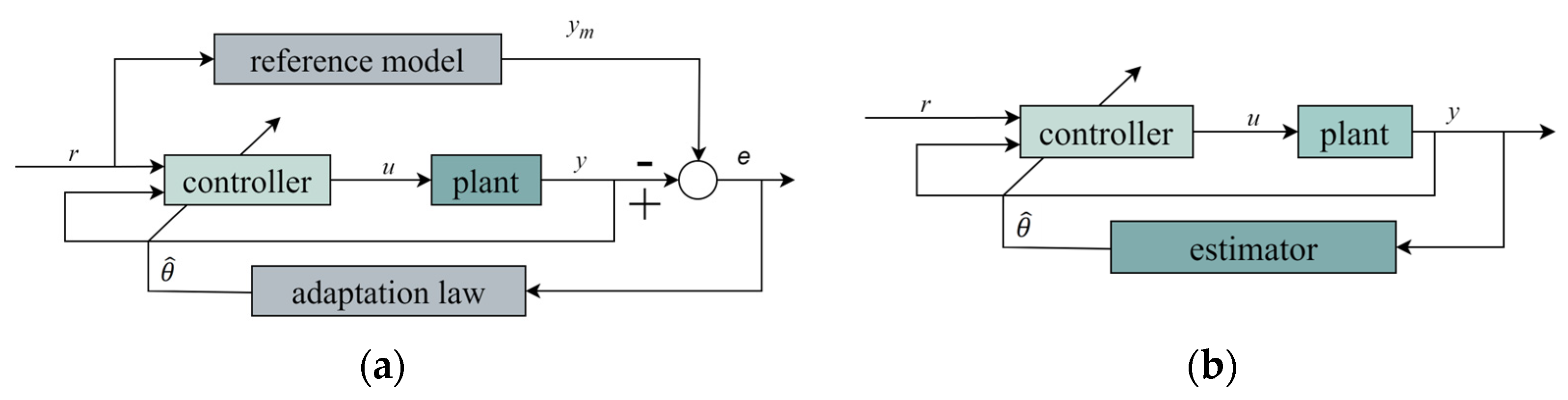
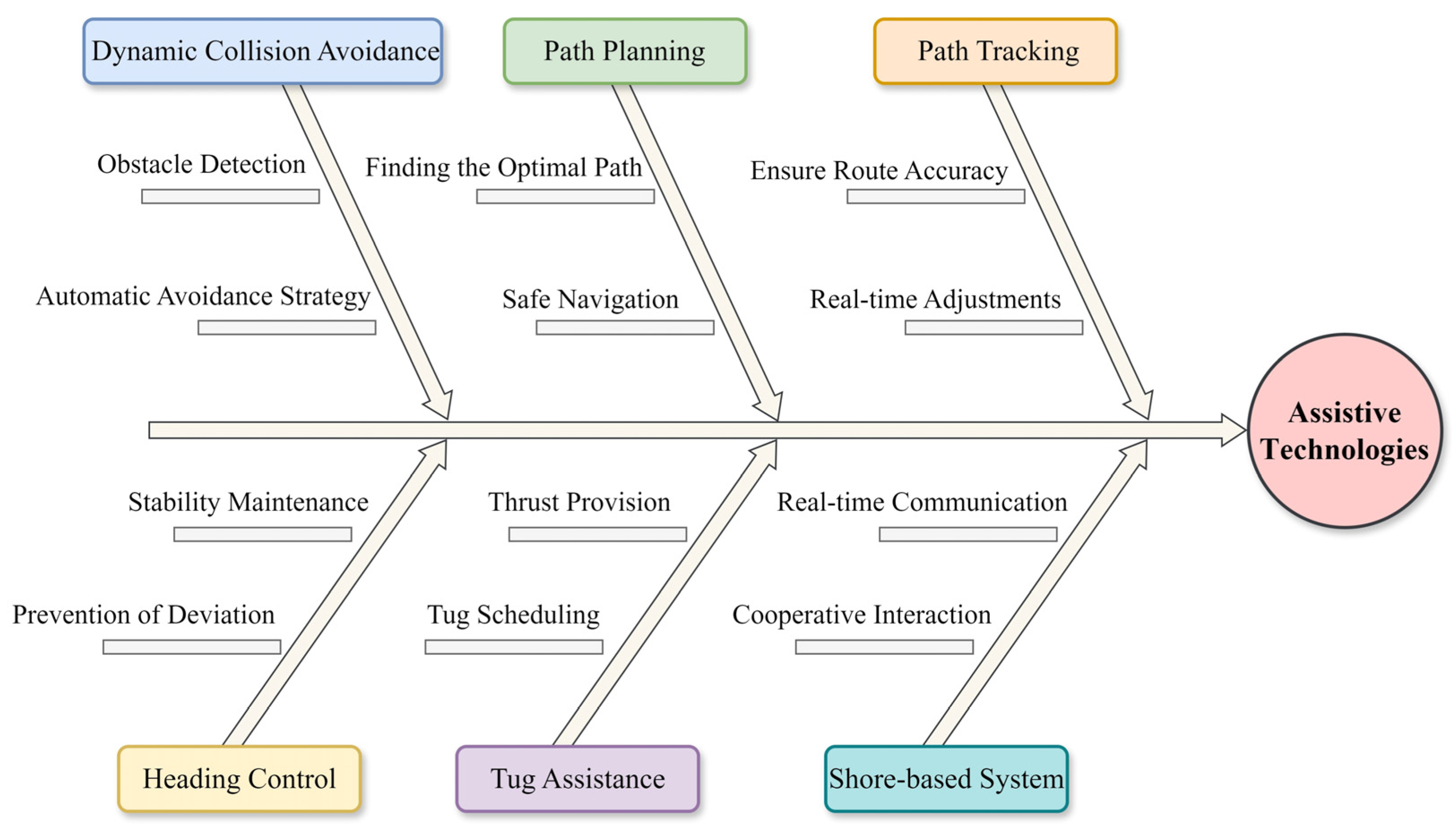
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).