
Distributed Estimator-Based Containment Control for Multi-AUV Systems Subject to Input Saturation and Unknown Disturbance

Abstract
:1. Introduction
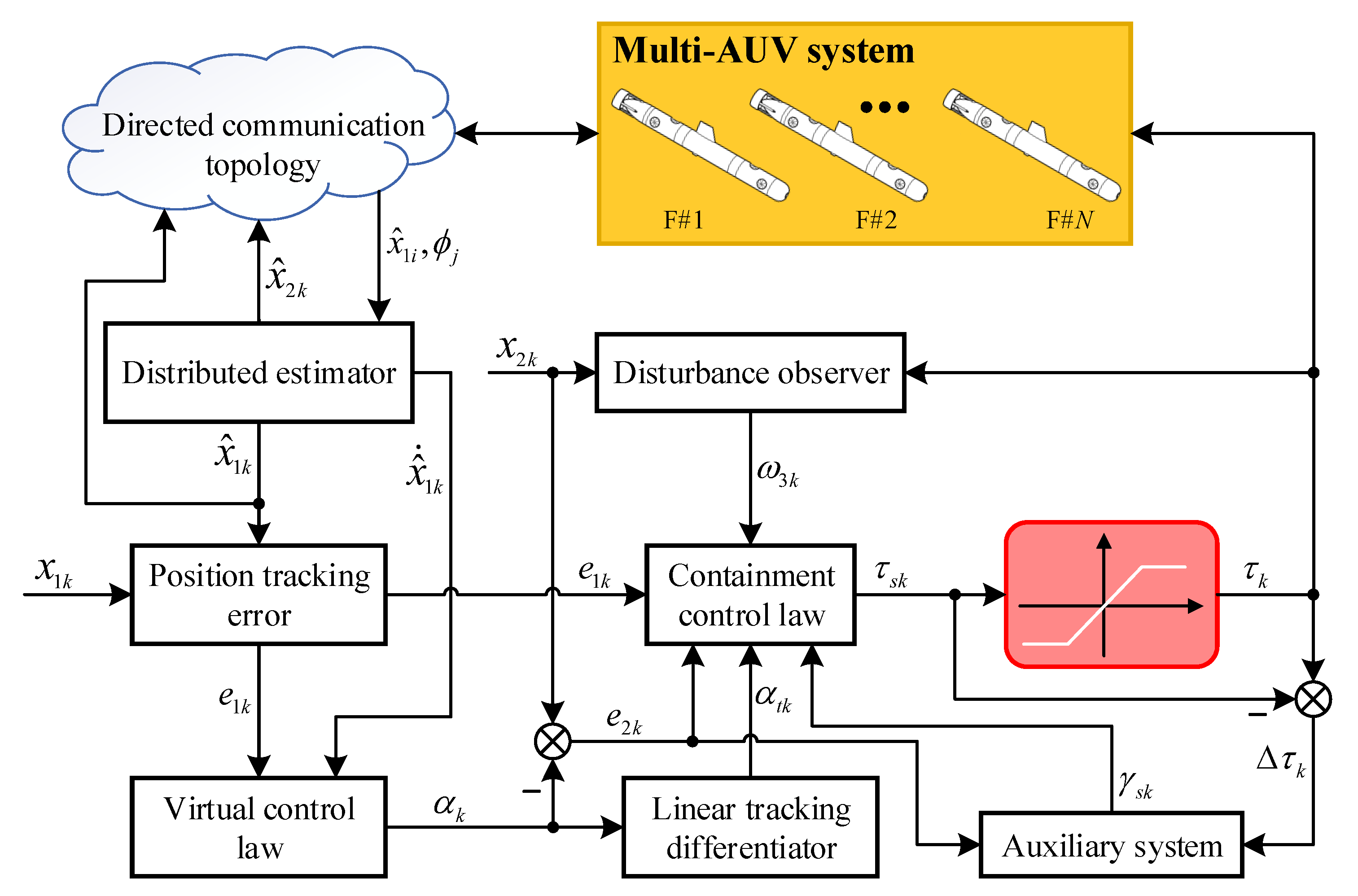
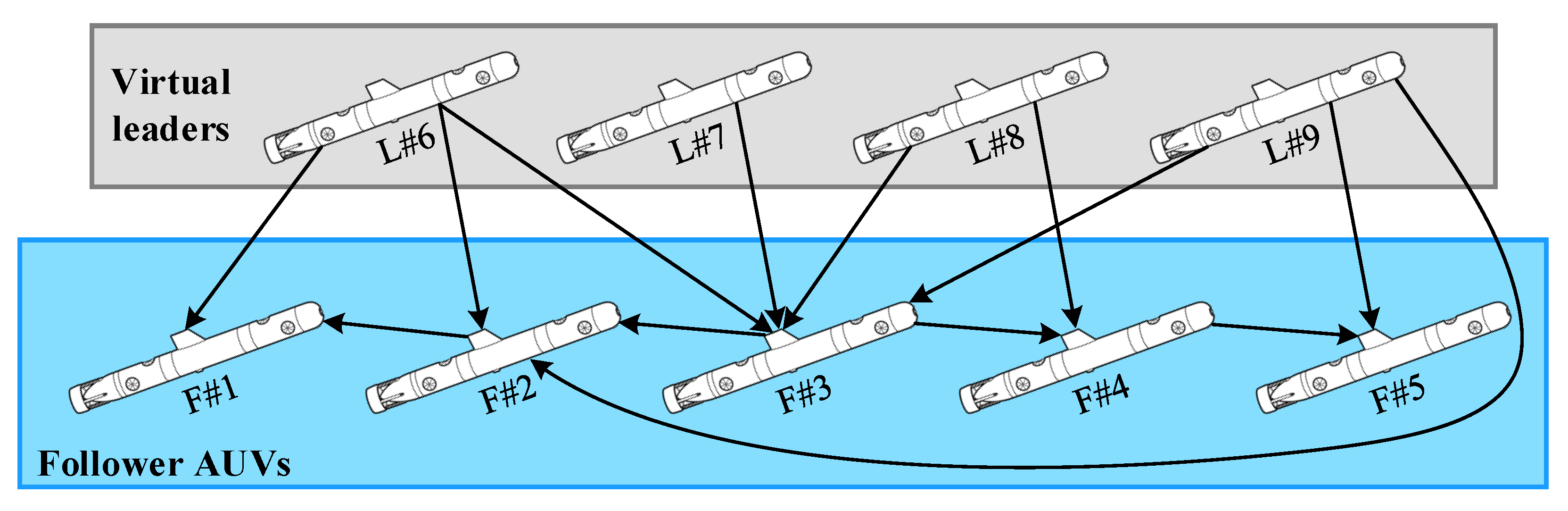
- Due to only a portion of AUVs being able to receive information from virtual leaders, distributed estimators are constructed to acquire accurate estimation information of the follower AUVs’ desired position. Compared with the centralized estimation control algorithm that needs to use a specific AUV to transmit information, the distributed estimation algorithm has a wider application, because each AUV is merely required to acquire its neighbors’ information.
- The control algorithm of this paper is proposed under the condition of directed communication topology. Compared with the control algorithm under an undirected communication topology, the control algorithm designed in this paper does not request two-way communication between AUVs, which is conducive to reducing the burden of communication equipment.
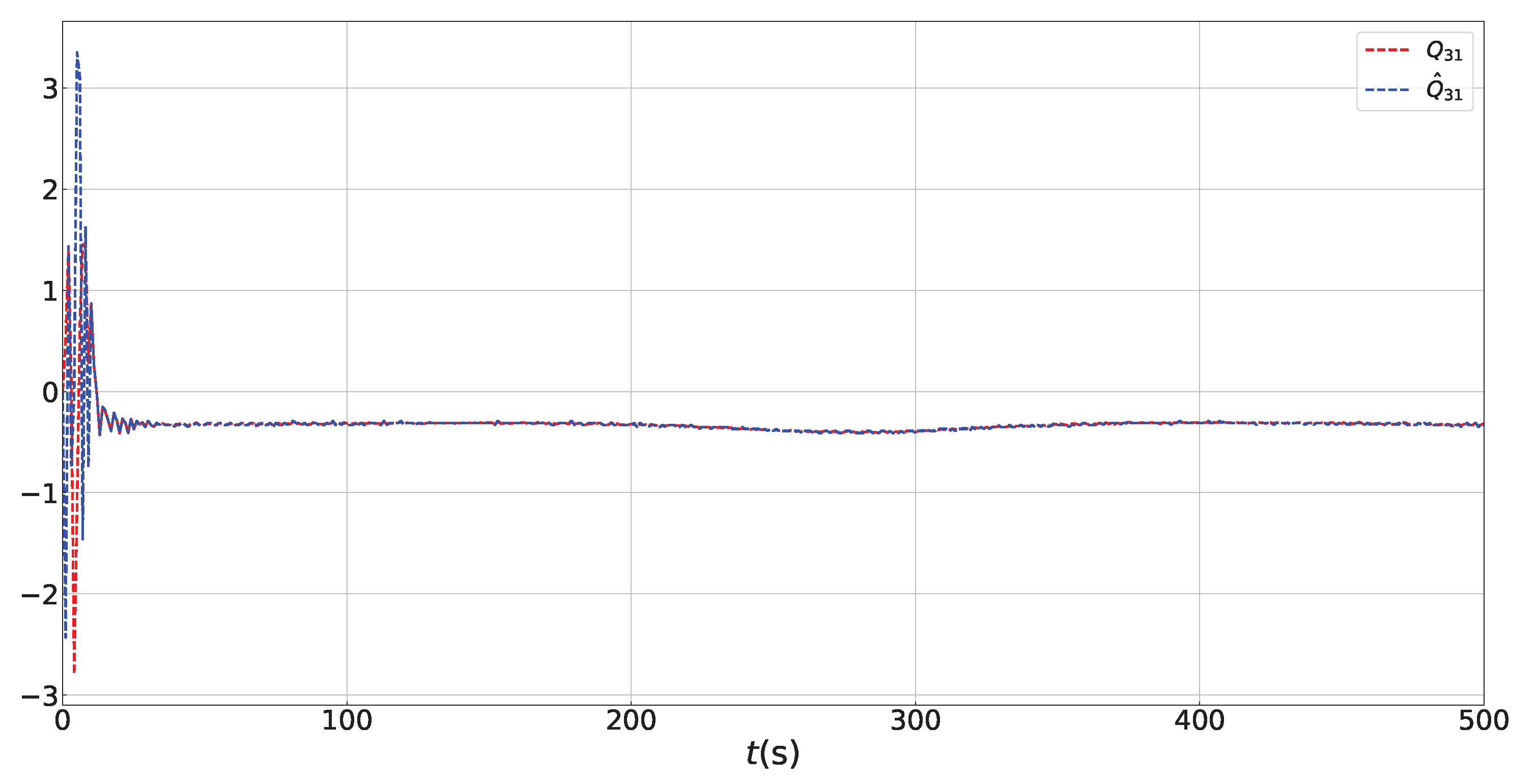
- The internal uncertainties and external disturbances are viewed as composite disturbances, and a disturbance observer is established for estimating and compensating for them, which reduces their adverse effects on the multi-AUV system and improves the system’s anti-disturbance ability. Compared to the method of designing a constant upper bound for disturbance, the conservatism of the algorithm is reduced.
- To address the issue of input saturation, the auxiliary system is constructed to limit the amplitude of control forces and torques, which reduces the unfavorable influence of input saturation on the multi-AUV system, improves the anti-saturation ability of the system, and further strengthens the stability and safety of the system.
2. Preliminaries
2.1. Communication Topology
2.2. AUV Model
2.3. Control Objective
3. Containment Control Scheme Design
3.1. Distributed Estimator Design
3.2. Containment Controller Design
3.3. Stability Analysis
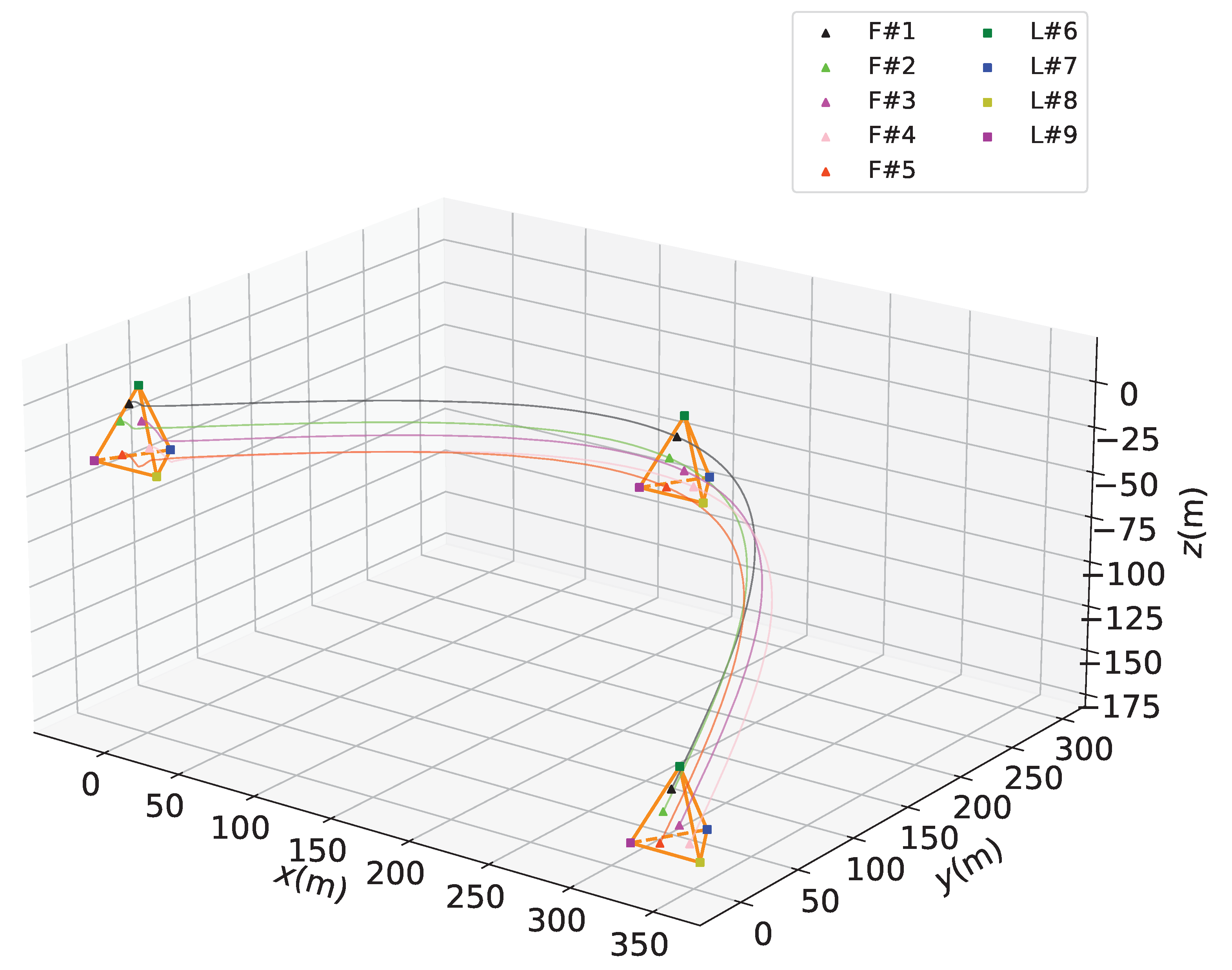
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, Y.; Zhang, T.; Li, Y.; Zhuang, Y. Tracking control of AUV via novel soft actor-critic and suboptimal demonstrations. Ocean Eng. 2024, 293, 116540. [Google Scholar] [CrossRef]
- Sun, Y.; Jing, R.; Qin, H.; Chen, H.; Du, Y. Distributed containment control for multiple ocean bottom flying nodes with velocity error constraint and input saturation. J. Frankl. Inst.-Eng. Appl. Math. 2023, 360, 5017–5047. [Google Scholar] [CrossRef]
- Xu, Z.; He, S.; Zhou, W.; Li, Y.; Xiang, J. Path Following Control With Sideslip Reduction for Underactuated Unmanned Surface Vehicles. IEEE Trans. Ind. Electron. 2024, 71, 11039–11047. [Google Scholar] [CrossRef]
- Hou, Y.; Wang, H.; Wei, Y.; Iu, H.H.C.; Fernando, T. Robust adaptive finite-time tracking control for Intervention-AUV with input saturation and output constraints using high-order control barrier function. Ocean Eng. 2023, 268, 113219. [Google Scholar] [CrossRef]
- An, S.; Wang, L.; He, Y. Robust fixed-time tracking control for underactuated AUVs based on fixed-time disturbance observer. Ocean Eng. 2022, 266, 112567. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, Q.; Shen, Y.; He, B. An online path planning algorithm for autonomous marine geomorphological surveys based on AUV. Eng. Appl. Artif. Intell. 2023, 118, 105548. [Google Scholar] [CrossRef]
- Chen, M.; Guo, S.; Zhu, D. Motion planning for an under-actuated autonomous underwater vehicle based on fast marching nonlinear model-predictive quantum particle swarm optimization. Ocean Eng. 2023, 268, 113391. [Google Scholar] [CrossRef]
- Huang, Z.; Su, Z.; Huang, B.; Song, S.; Li, J. Quaternion-based finite-time fault-tolerant trajectory tracking control for autonomous underwater vehicle without unwinding. ISA Trans. 2022, 131, 15–30. [Google Scholar] [CrossRef] [PubMed]
- Bian, Y.; Zhang, J.; Hu, M.; Du, C.; Cui, Q.; Ding, R. Self-triggered distributed model predictive control for cooperative diving of multi-AUV system. Ocean Eng. 2023, 267, 113262. [Google Scholar] [CrossRef]
- Zeng, Z.; Yue, W.; Zhu, L. Finite-time fuzzy cooperative control for multi-AUV systems under cyber-attacks with hybrid unknown nonlinearities. Ocean Eng. 2024, 304, 117875. [Google Scholar] [CrossRef]
- Li, Y.; Yu, W.; Guan, X. 3D Localization for Multiple AUVs in Anchor-Free Environments by Exploring the Use of Depth Information. IEEE-CAA J. Autom. Sin. 2024, 11, 1051–1053. [Google Scholar] [CrossRef]
- Pan, X.; Yan, Z.; Jia, H.; Zhou, J.; Yue, L. Fault-Tolerant Formation Control for Multiple Stochastic AUV System under Markovian Switching Topologies. J. Mar. Sci. Eng. 2023, 11, 159. [Google Scholar] [CrossRef]
- Li, J.; Zhang, H.; Chen, T.; Wang, J. AUV Formation Coordination Control Based on Transformed Topology under Time-Varying Delay and Communication Interruption. J. Mar. Sci. Eng. 2022, 10, 950. [Google Scholar] [CrossRef]
- Chen, S.; Ho, D.W. Consensus control for multiple AUVs under imperfect information caused by communication faults. Inf. Sci. 2016, 370–371, 565–577. [Google Scholar] [CrossRef]
- Lin, X.; Tian, W.; Zhang, W.; Zeng, J.; Zhang, C. The leaderless multi-AUV system fault-tolerant consensus strategy under heterogeneous communication topology. Ocean Eng. 2021, 237, 109594. [Google Scholar] [CrossRef]
- Li, S.; Wang, X. Finite-time consensus and collision avoidance control algorithms for multiple AUVs. Automatica 2013, 49, 3359–3367. [Google Scholar] [CrossRef]
- Yan, X.; Liao, Y.; Jia, J.; An, K.; Jiang, D. Impulsive consensus tracking for leader-following multi-AUV system with sampled information. Ocean Eng. 2023, 287, 115651. [Google Scholar] [CrossRef]
- Liang, H.; Zhang, L.; Sun, Y.; Huang, T. Containment Control of Semi-Markovian Multiagent Systems With Switching Topologies. IEEE Trans. Syst. Man Cybern.-Syst. 2021, 51, 3889–3899. [Google Scholar] [CrossRef]
- Yao, D.; Dou, C.; Yue, D.; Xie, X. Event-Triggered Practical Fixed-Time Fuzzy Containment Control for Stochastic Multiagent Systems. IEEE Trans. Fuzzy Syst. 2022, 30, 3052–3062. [Google Scholar] [CrossRef]
- Li, T.; Bai, W.; Liu, Q.; Long, Y.; Chen, C.L.P. Distributed Fault-Tolerant Containment Control Protocols for the Discrete-Time Multiagent Systems via Reinforcement Learning Method. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 3979–3991. [Google Scholar] [CrossRef] [PubMed]
- Qin, H.; Chen, H.; Sun, Y.; Chen, L. Distributed finite-time fault-tolerant containment control for multiple ocean Bottom Flying node systems with error constraints. Ocean Eng. 2019, 189, 106341. [Google Scholar] [CrossRef]
- Xu, J.; Cui, Y.; Xing, W.; Huang, F.; Yan, Z.; Wu, D.; Chen, T. Anti-disturbance fault-tolerant formation containment control for multiple autonomous underwater vehicles with actuator faults. Ocean Eng. 2022, 266, 112924. [Google Scholar] [CrossRef]
- Qin, H.; Chen, H.; Sun, Y. Distributed finite-time fault-tolerant containment control for multiple ocean bottom flying nodes. J. Frankl. Inst.-Eng. Appl. Math. 2020, 357, 11242–11264. [Google Scholar] [CrossRef]
- Xu, B.; Wang, Z.; Li, W.; Yu, Q. Distributed robust model predictive control-based formation-containment tracking control for autonomous underwater vehicles. Ocean Eng. 2023, 283, 115210. [Google Scholar] [CrossRef]
- Sun, Y.; Du, Y.; Qin, H. Distributed adaptive neural network constraint containment control for the benthic autonomous underwater vehicles. Neurocomputing 2022, 484, 89–98. [Google Scholar] [CrossRef]
- Burlutskiy, N.; Touahmi, Y.; Lee, B.H. Power efficient formation configuration for centralized leader-follower AUVs control. J. Mar. Sci. Technol. 2012, 17, 315–329. [Google Scholar] [CrossRef]
- Lin, X.; Tian, W.; Zhang, W.; Li, Z.; Zhang, C. The fault-tolerant consensus strategy for leaderless Multi-AUV system on heterogeneous condensation topology. Ocean Eng. 2022, 245, 110541. [Google Scholar] [CrossRef]
- Kim, J.H.; Yoo, S.J. Distributed event-driven adaptive three-dimensional formation tracking of networked autonomous underwater vehicles with unknown nonlinearities. Ocean Eng. 2021, 233, 109069. [Google Scholar] [CrossRef]
- Peng, H.; Zeng, B.; Yang, L.; Xu, Y.; Lu, R. Distributed Extended State Estimation for Complex Networks With Nonlinear Uncertainty. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 5952–5960. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, Z.; Wang, X.; Tian, Y.; Tan, Y.; Yang, C. An Estimator-Based Distributed Voltage-Predictive Control Strategy for AC Islanded Microgrids. IEEE Trans. Power Electron. 2015, 30, 3934–3951. [Google Scholar] [CrossRef]
- Chen, B.; Hu, G.; Ho, D.W.; Yu, L. Distributed Estimation and Control for Discrete Time-Varying Interconnected Systems. IEEE Trans. Autom. Control 2022, 67, 2192–2207. [Google Scholar] [CrossRef]
- Xia, Y.; Xu, K.; Li, Y.; Xu, G.; Xiang, X. Improved line-of-sight trajectory tracking control of under-actuated AUV subjects to ocean currents and input saturation. Ocean Eng. 2019, 174, 14–30. [Google Scholar] [CrossRef]
- Sarhadi, P.; Noei, A.R.; Khosravi, A. Adaptive integral feedback controller for pitch and yaw channels of an AUV with actuator saturations. ISA Trans. 2016, 65, 284–295. [Google Scholar] [CrossRef] [PubMed]
- Gong, H.; Er, M.J.; Liu, Y.; Ma, C. Three-dimensional optimal trajectory tracking control of underactuated AUVs with uncertain dynamics and input saturation. Ocean Eng. 2024, 298, 116757. [Google Scholar] [CrossRef]
- Zhang, J.; Xiang, X.; Lapierre, L.; Zhang, Q.; Li, W. Approach-angle-based three-dimensional indirect adaptive fuzzy path following of under-actuated AUV with input saturation. Appl. Ocean Res. 2021, 107, 102486. [Google Scholar] [CrossRef]
- Yang, X.; Yan, J.; Hua, C.; Guan, X. Trajectory Tracking Control of Autonomous Underwater Vehicle With Unknown Parameters and External Disturbances. IEEE Trans. Syst. Man Cybern.-Syst. 2021, 51, 1054–1063. [Google Scholar] [CrossRef]
- Wu, C.; Dai, Y.; Shan, L.; Zhu, Z. Date-Driven Tracking Control via Fuzzy-State Observer for AUV under Uncertain Disturbance and Time-Delay. J. Mar. Sci. Eng. 2023, 11, 207. [Google Scholar] [CrossRef]
- Li, D.; Zhang, W.; He, W.; Li, C.; Ge, S.S. Two-Layer Distributed Formation-Containment Control of Multiple Euler–Lagrange Systems by Output Feedback. IEEE T. Cybern. 2019, 49, 675–687. [Google Scholar] [CrossRef]
- Golub, G.H.; Van Loan, C.F. Matrix Computations; JHU Press: Baltimore, MD, USA, 2013. [Google Scholar]
- Guo, B.Z.; Zhao, Z.L. On convergence of tracking differentiator. Int. J. Control 2011, 84, 693–701. [Google Scholar] [CrossRef]
- Wang, N.; Karimi, H.R.; Li, H.; Su, S.F. Accurate trajectory tracking of disturbed surface vehicles: A finite-time control approach. IEEE-ASME Trans. Mechatron. 2019, 24, 1064–1074. [Google Scholar] [CrossRef]
- Allotta, B.; Caiti, A.; Costanzi, R.; Di Corato, F.; Fenucci, D.; Monni, N.; Pugi, L.; Ridolfi, A. Cooperative navigation of AUVs via acoustic communication networking: Field experience with the Typhoon vehicles. Auton. Robot. 2016, 40, 1229–1244. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Follower AUV | Initial Position | Follower AUV | Initial Position |
|---|---|---|---|
| F#1 | F#2 | ||
| F#3 | F#4 | ||
| F#5 |
| Virtual Leader | Motion Trajectory |
|---|---|
| L#6 | |
| L#7 | |
| L#8 | |
| L#9 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 5 | 5 | ||
| 2 | 2 | ||
| 8 | b | 0.01 | |
| C | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, L.; Yan, Z.; Xu, J. Distributed Estimator-Based Containment Control for Multi-AUV Systems Subject to Input Saturation and Unknown Disturbance. J. Mar. Sci. Eng. 2024, 12, 1200. https://doi.org/10.3390/jmse12071200
Yin L, Yan Z, Xu J. Distributed Estimator-Based Containment Control for Multi-AUV Systems Subject to Input Saturation and Unknown Disturbance. Journal of Marine Science and Engineering. 2024; 12(7):1200. https://doi.org/10.3390/jmse12071200
Chicago/Turabian StyleYin, Liangang, Zheping Yan, and Jian Xu. 2024. "Distributed Estimator-Based Containment Control for Multi-AUV Systems Subject to Input Saturation and Unknown Disturbance" Journal of Marine Science and Engineering 12, no. 7: 1200. https://doi.org/10.3390/jmse12071200