
Identification of Complex Multi-Vessel Encounter Scenarios and Collision Avoidance Decision Modeling for MASSs
 , , ,
, , ,
Abstract
:1. Introduction
1.1. Research Significance
- (1)
- It is conducive to the expansion of the provisions of the COLREGs and promotes manned and unmanned vessels to reach a consensus on CA decision-making. Furthermore, it clarifies their respective responsibilities and obligations and then takes effective CA actions.
- (2)
- It is conducive to exploring the division mechanism of multi-ship encounter situations, enhancing the cognitive ability of intelligent ships to recognize complex encounters. Furthermore, it provides a reference and basis for the decision-making process for the autonomous navigation of ships.
- (3)
- Intelligent algorithm testing should be supported by representative scenarios, and standardized, typical scenarios are of great significance to algorithm testing. The refinement of standard, typical scenes differs from the completeness test based on probability statistics, which should be highly generalized and representative. Furthermore, it should be based on the difficult scenarios of complex multi-ship encounters, drawing on practical nautical experience.
- (4)
- In-depth understanding of the risk and feasible strategy space of each ship in a multi-ship encounter situation can reduce the risk of collision due to human factors and ensure the safety of ship navigation.
1.2. Multi-Ship Encounter Situation—The Challenge of Ship Collision Avoidance
- (1)
- COLREGs do not have clear regulations about multi-ship encounter situations.
- (2)
- On manned and unmanned large vessels, different vessel officers and algorithms produce different feasible solutions. However, the optimal solution is difficult to determine in practice.
- (3)
- The coupling of multi-ship encounters is very high, whereas the decoupling is difficult. A give-way ship in a two-ship encounter situation can be a stand-on ship in another situation formed at the same time.
1.3. Factors Affecting CA Decisions in Complex Encounters
1.3.1. Collision Risk
1.3.2. Encounter Situation
1.3.3. Collision Avoidance Strategy Algorithm
2. Collision Risk Identification and Multi-Ship Encounter Classification
2.1. Collision Risk Identification Method
2.2. Principles for the Delimitation of Multi-Ship Encounters
- (1)
- HO, head-on
- (2)
- SPC, small angle port crossing
- (3)
- BPC, big angle port crossing
- (4)
- SSC, small angle starboard crossing
- (5)
- BSC, big angle starboard crossing
- (6)
- OG, overtaking
- (7)
- ON, overtaken
3. Simplified Classification of Multi-Ship Encounter Situations
3.1. Classification of Similarities and Differences in Encounter Situations Created by Multi-Ships and the OS
3.1.1. TSs and the OS Meet in the Same Multiple Encounter Situation (SM)
3.1.2. TSs and the OS Meet in a Different Multiple Encounter Situation (DM)
3.2. Classification According to Risk or No Risk of Collision between Multiple Vessels
3.2.1. No Risk or Potential Risk of Collision between TSs
3.2.2. Risk or Potential Risk of Collision between TSs
4. Collision Avoidance Decision-Making in Multi-Ship Encounter Situations
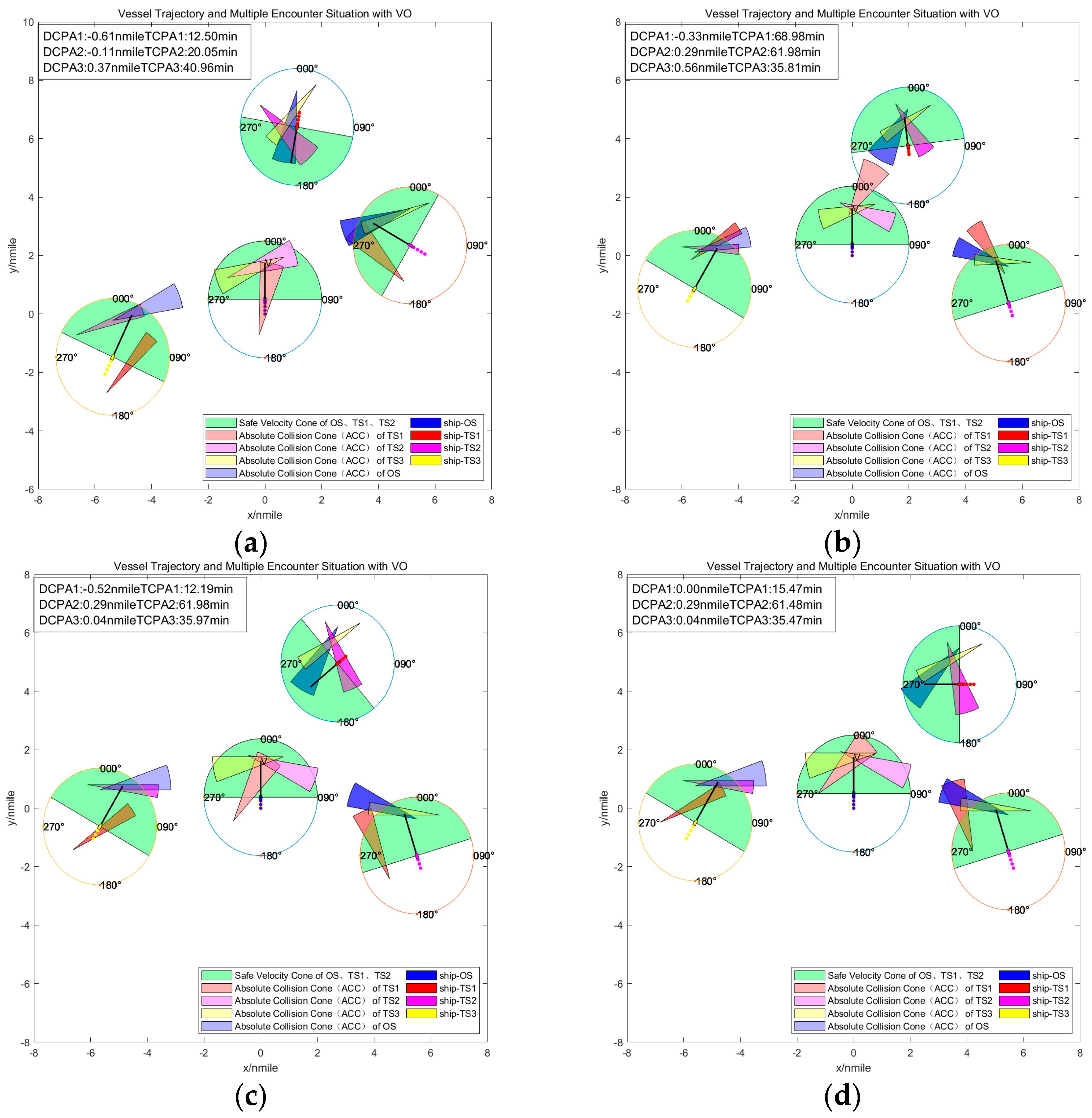
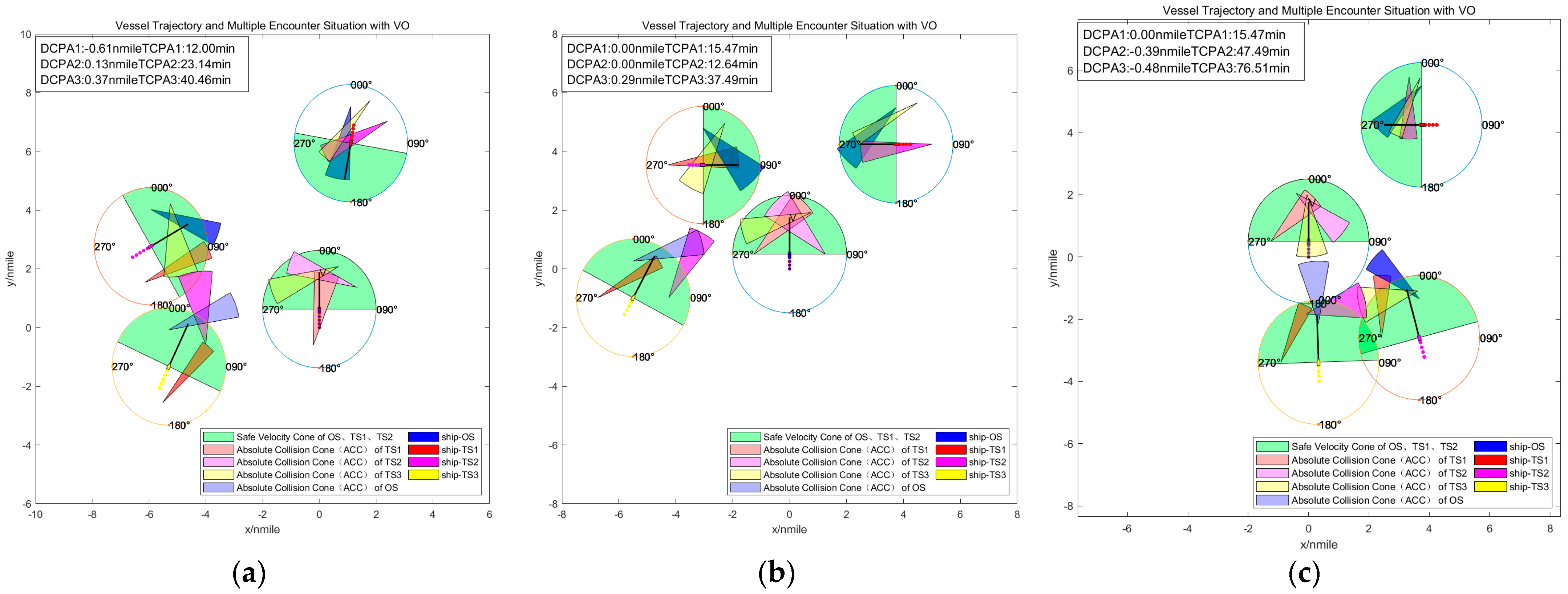
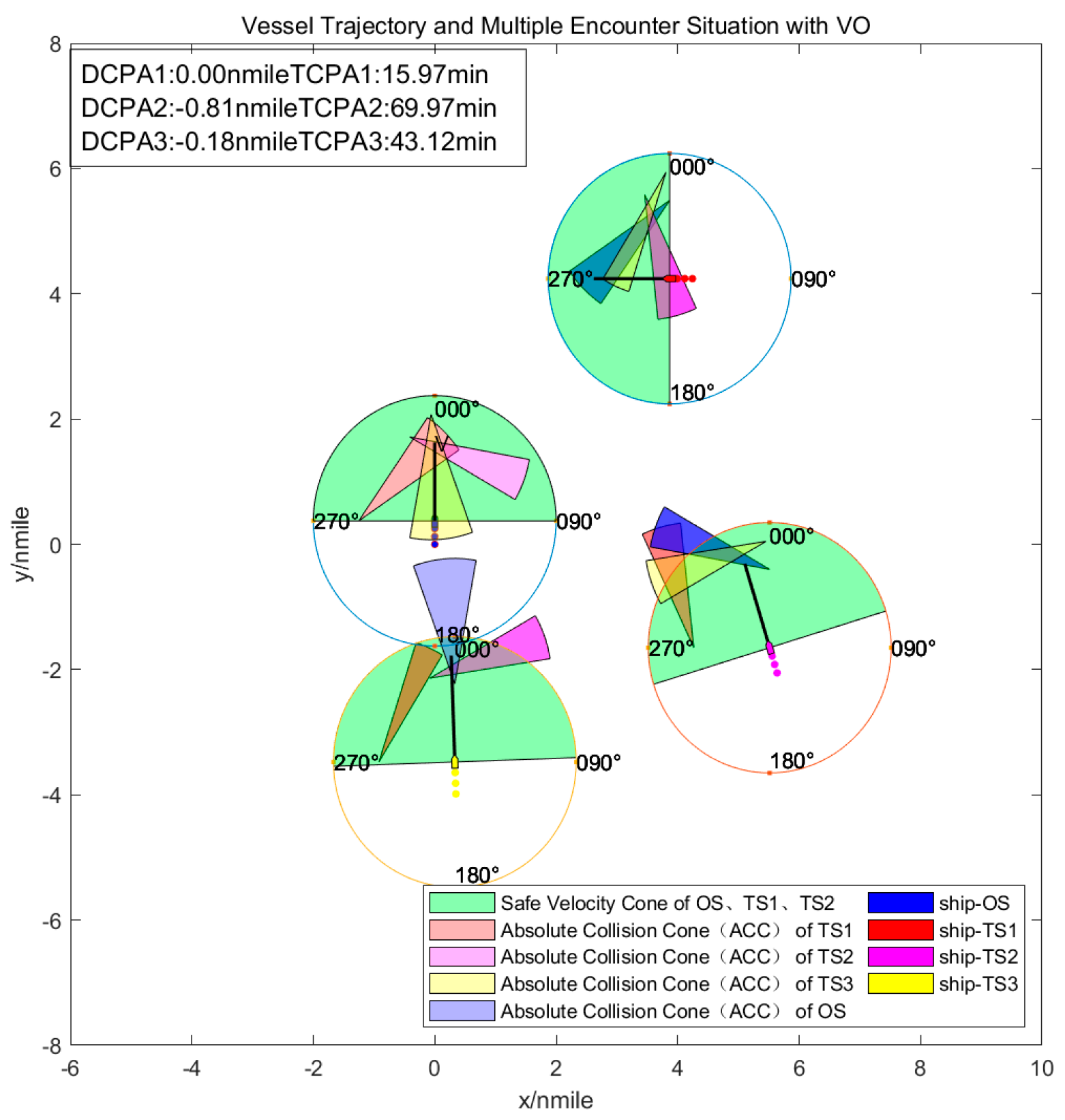
5. Simulation Experiment
5.1. Encounter Situation Involving Three Ships
5.2. Encounter Situation Involving Four Ships
5.3. Encounter Situation with AIS Data
6. Conclusions and Future Studies
6.1. Conclusions
6.2. Research Limitations and Future Studies
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- EMSA. Annual Overview of Marine Casualties and Incidents; EMSA: Lisbon, Portugal, 2023. [Google Scholar]
- Song, J.; Shoji, R.; Tamaru, H.; Kayano, J. Modeling Human Encounter Situation Awareness Results Using Support Vector Machine Models. Appl. Sci. 2023, 13, 7521. [Google Scholar] [CrossRef]
- Yim, J.; Kim, D.; Park, D. Modeling perceived collision risk in vessel encounter situations. Ocean Eng. 2018, 166, 64–75. [Google Scholar] [CrossRef]
- Sánchez-Beaskoetxea, J.; Basterretxea-Iribar, I.; Sotés, I.; Machado, M.d.L.M.M. Human error in marine accidents: Is the crew normally to blame? Marit. Transp. Res. 2021, 2, 100016. [Google Scholar] [CrossRef]
- Zhen, R.; Shi, Z.; Gu, Q.; Yang, S. A novel deterministic search-based algorithm for multi-ship collaborative collision avoidance decision-making. Ocean Eng. 2024, 292, 116524. [Google Scholar] [CrossRef]
- NTSB. Collision between Liquefied Gas Carrier Genesis River and Voyager Tow Houston Ship Channel, Upper Galveston Bay, Texas; NTSB: Washington, DC, USA, 2019. [Google Scholar]
- Gang, L.; Wang, Y.; Sun, Y.; Zhou, L.; Zhang, M. Estimation of vessel collision risk index based on support vector machine. Adv. Mech. Eng. 2016, 8, 2071836213. [Google Scholar] [CrossRef]
- Xu, Q.; Wang, N. A Survey on Ship Collision Risk Evaluation. Promet-Traffic Transp. 2014, 26, 475–486. [Google Scholar] [CrossRef]
- Xie, S.; Garofano, V.; Chu, X.; Negenborn, R.R. Model predictive ship collision avoidance based on Q-learning beetle swarm antenna search and neural networks. Ocean Eng. 2019, 193, 106609. [Google Scholar] [CrossRef]
- Namgung, H.; Jeong, J.S.; Kim, J. Real-Time Collision Risk Assessment System Based on the Fuzzy Theory in Accordance with Collision Avoidance Rules. In Proceedings of the 2020 Joint 11th International Conference on Soft Computing and Intelligent Systems and 21st International Symposium on Advanced Intelligent Systems (SCIS-ISIS), Hachijo Island, Japan, 5–8 December 2020; pp. 1–4. [Google Scholar]
- Sarhadi, P.; Naeem, W.; Athanasopoulos, N. An Integrated Risk Assessment and Collision Avoidance Methodology for an Autonomous Catamaran with Fuzzy Weighting Functions. In Proceedings of the 2022 UKACC 13th International Conference on Control (CONTROL), Plymouth, UK, 20–22 April 2022; pp. 228–234. [Google Scholar]
- Hu, Y.; Zhang, A.; Tian, W.; Zhang, J.; Hou, Z. Multi-Ship Collision Avoidance Decision-Making Based on Collision Risk Index. J. Mar. Sci. Eng. 2020, 8, 640. [Google Scholar] [CrossRef]
- Huang, Y.; van Gelder, P.H.A.J. Collision risk measure for triggering evasive actions of maritime autonomous surface ships. Saf. Sci. 2020, 127, 104708. [Google Scholar] [CrossRef]
- Yang, X.; Lou, M.; Hu, J.; Ye, H.; Zhu, Z.; Shen, H.; Xiang, Z.; Zhang, B. A human-like collision avoidance method for USVs based on deep reinforcement learning and velocity obstacle. Expert Syst. Appl. 2024, 254, 124388. [Google Scholar] [CrossRef]
- Li, Y.-P.; Liu, Z.-J.; Zheng, Z.-Y. Multi-ship encounter situational awareness based on AIS data. In Proceedings of the 2017 4th International Conference on Information, Cybernetics and Computational Social Systems (ICCSS), Dalian, China, 24–26 July 2017; pp. 523–527. [Google Scholar]
- Du, L.; Goerlandt, F.; Valdez Banda, O.A.; Huang, Y.; Wen, Y.; Kujala, P. Improving stand-on ship’s situational awareness by estimating the intention of the give-way ship. Ocean Eng. 2020, 201, 107110. [Google Scholar] [CrossRef]
- Murray, B.; Perera, L.P. Ship behavior prediction via trajectory extraction-based clustering for maritime situation awareness. J. Ocean Eng. Sci. 2022, 7, 1–13. [Google Scholar] [CrossRef]
- Zhen, R.; Shi, Z.; Liu, J.; Shao, Z. A novel arena-based regional collision risk assessment method of multi-ship encounter situation in complex waters. Ocean Eng. 2022, 246, 110531. [Google Scholar] [CrossRef]
- Tian, W.; Zhu, M.; Han, P.; Li, G.; Zhang, H. Pairwise ship encounter identification and classification for knowledge extraction. Ocean Eng. 2024, 294, 116752. [Google Scholar] [CrossRef]
- Cho, Y.; Han, J.; Kim, J. Efficient COLREG-Compliant Collision Avoidance in Multi-Ship Encounter Situations. IEEE Trans. Intell. Transp. Syst. 2022, 23, 1899–1911. [Google Scholar] [CrossRef]
- Gao, M.; Shi, G.; Liu, J. Ship encounter azimuth map division based on automatic identification system data and support vector classification. Ocean Eng. 2020, 213, 107636. [Google Scholar] [CrossRef]
- Song, J.; Kayano, J.; Shoji, R. Modeling human’s collision avoidance direction in an encounter situation using an ensemble classifier. Ocean Eng. 2023, 271, 113738. [Google Scholar] [CrossRef]
- Chen, X.; Liu, Y.; Achuthan, K.; Zhang, X.; Chen, J. A semi-supervised deep learning model for ship encounter situation classification. Ocean Eng. 2021, 239, 109824. [Google Scholar] [CrossRef]
- Lyu, H.; Hao, Z.; Li, J.; Li, G.; Sun, X.; Zhang, G.; Yin, Y.; Zhao, Y.; Zhang, L. Ship Autonomous Collision-Avoidance Strategies—A Comprehensive Review. J. Mar. Sci. Eng. 2023, 11, 830. [Google Scholar] [CrossRef]
- Lyu, H.; Yin, Y. COLREGS-Constrained Real-time Path Planning for Autonomous Ships Using Modified Artificial Potential Fields. J. Navig. 2019, 72, 588–608. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, L.; van Gelder, P.H.A.J. Generalized velocity obstacle algorithm for preventing ship collisions at sea. Ocean Eng. 2019, 173, 142–156. [Google Scholar] [CrossRef]
- Chen, P.; Huang, Y.; Papadimitriou, E.; Mou, J.; van Gelder, P.H.A.J.M. An improved time discretized non-linear velocity obstacle method for multi-ship encounter detection. Ocean Eng. 2020, 196, 106718. [Google Scholar] [CrossRef]
- Zhao, L.; Roh, M. COLREGs-compliant multiship collision avoidance based on deep reinforcement learning. Ocean Eng. 2019, 191, 106436. [Google Scholar] [CrossRef]
- Ahmed, Y.A.; Hannan, M.A.; Oraby, M.Y.; Maimun, A. COLREGs Compliant Fuzzy-Based Collision Avoidance System for Multiple Ship Encounters. J. Mar. Sci. Eng. 2021, 9, 790. [Google Scholar] [CrossRef]
- Liu, H.; Deng, R.; Zhang, L. The application research for ship collision avoidance with hybrid optimization algorithm. In Proceedings of the 2016 IEEE International Conference on Information and Automation (ICIA), Ningbo, China, 1–3 August 2016; pp. 760–767. [Google Scholar]
- Li, S.; Liu, J.; Negenborn, R.R. Distributed coordination for collision avoidance of multiple ships considering ship maneuverability. Ocean Eng. 2019, 181, 212–226. [Google Scholar] [CrossRef]
- Wei, G.; Kuo, W. COLREGs-Compliant Multi-Ship Collision Avoidance Based on Multi-Agent Reinforcement Learning Technique. J. Mar. Sci. Eng. 2022, 10, 1431. [Google Scholar] [CrossRef]
- Zhu, J.; Gao, M.; Zhang, A.; Hu, Y.; Zeng, X. Multi-Ship Encounter Situation Identification and Analysis Based on AIS Data and Graph Complex Network Theory. J. Mar. Sci. Eng. 2022, 10, 1536. [Google Scholar] [CrossRef]
- Liu, K.; Wu, X.; Zhou, Y.; Yuan, Z.; Yang, X.; Xin, X.; Zhuang, S. A conflict cluster-based method for collision avoidance decision-making in multi-ship encounter situations. Ocean Eng. 2023, 288, 116038. [Google Scholar] [CrossRef]
- Zhen, R.; Shi, Z. A Novel Adaptive Visual Analytics Framework for Multiship Encounter Identification. J. Adv. Transp. 2021, 2021, 3063957. [Google Scholar] [CrossRef]
- Lyu, H.; Liu, W.; Guo, S.; Tan, G.; Fu, C.; Sun, X.; Zhao, Y.; Zhang, L.; Yin, Y. Autonomous collision avoidance method for MASSs based on precise potential field modelling and COLREGs constraints in complex sailing environments. Ocean Eng. 2024, 292, 116530. [Google Scholar] [CrossRef]
- Zhang, W.; Yan, C.; Lyu, H.; Wang, P.; Xue, Z.; Li, Z.; Xiao, B. COLREGS-based Path Planning for Ships at Sea Using Velocity Obstacles. IEEE Access 2021, 9, 32613–32626. [Google Scholar] [CrossRef]
- Judson, B. A Tanker Navigation Safety System. J. Navig. 1997, 50, 97–108. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Szlapczynska, J. A Target Information Display for Visualising Collision Avoidance Manoeuvres in Various Visibility Conditions. J. Navig. 2015, 68, 1041–1055. [Google Scholar] [CrossRef]
- Cockcroft, A.; Lameijer, J. A Guide to the Collision Avoidance Rules; Elsevier Butterworth-Heinemann: Burlington, London, UK, 2011. [Google Scholar]
- Wang, X.; Liu, Z.; Cai, Y. The ship maneuverability based collision avoidance dynamic support system in close-quarters situation. Ocean Eng. 2017, 146, 486–497. [Google Scholar] [CrossRef]
- Perera, L.P.; Carvalho, J.P.; Guedes Soares, C. Solutions to the Failures and Limitations of Mamdani Fuzzy Inference in Ship Navigation. IEEE Trans. Veh. Technol. 2014, 63, 1539–1554. [Google Scholar] [CrossRef]
- Perera, L.P. Deep Learning Toward Autonomous Ship Navigation and Possible COLREGs Failures. J. Offshore Mech. Arct. 2020, 142. [Google Scholar] [CrossRef]
- Wang, X.; Wang, G.; Wang, Q.; Han, J.; Chen, L.; Wang, B.; Shi, H. A Construction Method of a Sequential Decision Chain for Unmanned-Ship Autonomous Collision Avoidance Based on Human-Like Thinking. J. Mar. Sci. Eng. 2023, 11, 2218. [Google Scholar] [CrossRef]
- Wang, G.; Wang, X.; Wang, Q.; Chen, L.; Han, J.; Wang, B.; Shi, H. Complex encounter situation modeling and prediction method for unmanned ships based on bounded rational game. Ocean Eng. 2023, 273. [Google Scholar] [CrossRef]
- Tam, C.; Bucknall, R. Collision risk assessment for ships. J. Mar. Sci. Tech. 2010, 15, 257–270. [Google Scholar] [CrossRef]
- Chun, D.; Roh, M.; Lee, H.; Yu, D. Method for collision avoidance based on deep reinforcement learning with path-speed control for an autonomous ship. Int. J. Nav. Arch. Ocean Eng. 2024, 16, 100579. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbreviation | Meaning |
|---|---|
| SAFE | No risk of collision |
| HO | Head-on situation |
| CS_SO | Crossing situation and the OS is the stand-on ship |
| CS_GW | Crossing situation and the OS is the give-way ship |
| ON_SO | Overtaken and the TS is overtaking the OS () |
| OG_GW | Overtaking and the OS is overtaking the TS () |
| Relative Bearing (°) | TS’s Heading (°) | Encounter Situation | Responsibility |
|---|---|---|---|
| 010 | 180~200 | Head-on | Alter course to starboard |
| 200~302.5 | Crossing | Give-way ship | |
| 302.5~077.5 | Overtaking (VOS > VTS) | Give-way ship | |
| 077.5~180 | Indiscriminate | Stand-on ship |
| OS to TSs | SM Simplified Classification | ||
|---|---|---|---|
| Head-on | Head on | ||
| (SM-HO) | |||
| Crossing (SM-PC/ SM-SC) | Small angle port crossing | Big angle port crossing | Big and small angle port crossing |
| (SM-SPC) | (SM-BPC) | (SM-BSPC) | |
| Small angle starboard crossing | Big angle starboard crossing | Big and small angle starboard crossing | |
| (SM-SSC) | (SM-BSC) | (SM-BSSC) | |
| Overtaking | Overtaking | Overtaken | Overtaking and overtaken |
| (SM-OG) | (SM-ON) | (SM-OGN) | |
| Encounter Situation | DM Simplified Classification | ||
|---|---|---|---|
| TS1 | TS2 | ||
| Head-on | Overtaking | Head on and overtaking | Head on and overtaken |
| (DM-HOOG) | (DM-HOON) | ||
| Head-on | Crossing | Head on and starboard crossing | Head on and port crossing |
| (DM-HOSC) | (DM-HOPC) | ||
| Crossing | Overtaking | Starboard crossing and overtaking | Starboard crossing and overtaken |
| (DM-SCOG) | (DM-SCON) | ||
| Port crossing and overtaking | Port crossing and overtaken | ||
| (DM-PCOG) | (DM-PCON) | ||
| Crossing | Crossing | Port and starboard crossing | |
| (DM-PSC) | |||
| Relative Bearing (°) | Encounter Situation | Action to Avoid Collision of the OS | ||
|---|---|---|---|---|
| TS1 | TS2 | TS1 | TS2 | |
| 350°~010° | 350°~067.5° | HO/OG | HO/SSC /OG | Alter course to starboard |
| 067.5°~112.5° | BSC | Alter course to starboard and slacken speed | ||
| 112.5°~292.5° | ON/BPC | Alter course to starboard | ||
| 010°~067.5° | 010°~067.5° | SSC | SSC | Alter course to starboard |
| 112.5°~292.5° | OG/BPC | |||
| 067.5°~112.5° | 010°~067.5° | BSC | SSC/ON | Alter course to port Alter course to starboard Alter course to starboard and slacken speed |
| 067.5°~112.5° | BSC | |||
| 112.5°~292.5° | OG/BPC | |||
| 112.5°~292.5° | 112.5°~292.5° | ON/BPC | ON/BPC | Keep course and speed |
| 292.5°~350° | 350°~067.5° | OG | HO/SSC /OG | Alter course to starboard |
| 067.5°~112.5° | BSC | Alter course to starboard and slacken speed | ||
| 112.5°~247.5° | ON | Alter course to port | ||
| 247.5°~350° | BPC/SPC /OG | Alter course to starboard | ||
| 350°~067.5° | SPC | HO/SSC /OG | Alter course to starboard | |
| 067.5°~112.5° | BSC | Alter course to starboard and slacken speed | ||
| 112.5°~350° | ON/PC | Keep course and speed | ||
| Imazu Problem | #5 | #6 | #7 | #8 | #9 | #10 | #11 | ||
|---|---|---|---|---|---|---|---|---|---|
| Encounter Situation | DM HOSSC | SM BSC | DM BSCOG | DM SSCOG | SM BSSC | DM PSC | DM PSC | DM OGN | |
| TS1 | BT1 (°) | 045 | 070 | 030 | 005 | 045 | 260 | 315 | 330 |
| Dr1 (nm) | 7 | 7 | 4 | 5 | 7 | 6 | 8 | 4 | |
| (°) | 270 | 310 | 353 | 358 | 270 | 025 | 090 | 008 | |
| V1 (kn) | 15 | 16.8 | 12 | 12 | 15 | 18 | 15 | 12 | |
| TS2 | BT2 (°) | 005 | 110 | 110 | 045 | 110 | 045 | 105 | 150 |
| Dr2 (nm) | 6 | 7 | 7 | 8 | 7 | 8 | 6 | 5 | |
| (°) | 183 | 338 | 338 | 270 | 338 | 270 | 340 | 350 | |
| V2 (kn) | 15 | 19.8 | 19.8 | 15 | 19.8 | 15 | 18 | 20.4 | |
| Imazu Problem | #12 | #13 | #14 | #15 | #16 | #17 | #18 | #19 | #20 | #21 | #22 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Encounter Situation | DM HOBSC | DM HOPC | SM BSSC | SM BSSC | DM PSC | DM BSCOG | SM BSSC | SM BSSC | DM SSCON | SM BSSC | SM BSSC | |
| TS1 | BT1 (°) | 010 | 010 | 045 | 045 | 045 | 030 | 030 | 030 | 045 | 045 | 045 |
| Dr1 (nm) | 7 | 7 | 8 | 6 | 6 | 4 | 6 | 6 | 6 | 6 | 6 | |
| (°) | 190 | 190 | 270 | 270 | 270 | 353 | 230 | 230 | 270 | 270 | 270 | |
| V1 (kn) | 15 | 15 | 15 | 15 | 15 | 12 | 15 | 15 | 15 | 15 | 15 | |
| TS2 | BT2 (°) | 070 | 290 | 070 | 355 | 315 | 110 | 110 | 110 | 130 | 110 | 110 |
| Dr2 (nm) | 6 | 7 | 6 | 5 | 5 | 6 | 6 | 6 | 5 | 6 | 6 | |
| (°) | 300 | 060 | 300 | 003 | 270 | 343 | 343 | 343 | 345 | 343 | 343 | |
| V2 (kn) | 18 | 18 | 16.8 | 12 | 15 | 18 | 18 | 18 | 18 | 18 | 18 | |
| TS3 | BT3 (°) | 250 | 250 | 108 | 110 | 255 | 255 | 070 | 260 | 175 | 260 | 175 |
| Dr3 (nm) | 6 | 6 | 5 | 6 | 6 | 6 | 6 | 6 | 4 | 6 | 4 | |
| (°) | 025 | 025 | 330 | 335 | 028 | 030 | 320 | 030 | 358 | 030 | 358 | |
| V3 (kn) | 19.8 | 19.8 | 20.4 | 19.8 | 15.6 | 19.8 | 15.6 | 19.8 | 18 | 19.8 | 19.8 | |
| Ship | Longitude (°) | Latitude (°) | COG (°) | SOG (kn) |
|---|---|---|---|---|
| 273(OS) | 120.2788 | 36.03597 | 338.8768 | 9.3116 |
| 1120(TS1) | 120.269 | 36.03675 | 265.8746 | 13.90 |
| 2570(TS2) | 120.2656 | 36.04933 | 267.2909 | 14.2608 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lyu, H.; Ma, X.; Tan, G.; Yin, Y.; Sun, X.; Zhang, L.; Kang, X.; Song, J. Identification of Complex Multi-Vessel Encounter Scenarios and Collision Avoidance Decision Modeling for MASSs. J. Mar. Sci. Eng. 2024, 12, 1289. https://doi.org/10.3390/jmse12081289
Lyu H, Ma X, Tan G, Yin Y, Sun X, Zhang L, Kang X, Song J. Identification of Complex Multi-Vessel Encounter Scenarios and Collision Avoidance Decision Modeling for MASSs. Journal of Marine Science and Engineering. 2024; 12(8):1289. https://doi.org/10.3390/jmse12081289
Chicago/Turabian StyleLyu, Hongguang, Xiaoru Ma, Guifu Tan, Yong Yin, Xiaofeng Sun, Lunping Zhang, Xikai Kang, and Jian Song. 2024. "Identification of Complex Multi-Vessel Encounter Scenarios and Collision Avoidance Decision Modeling for MASSs" Journal of Marine Science and Engineering 12, no. 8: 1289. https://doi.org/10.3390/jmse12081289