

Ship Trajectory Planning and Optimization via Ensemble Hybrid A* and Multi-Target Point Artificial Potential Field Model


Abstract
1. Introduction
- (1)
- In this paper, a new A*path planning algorithm is proposed, which considers the constraints of ship motion, improves the traditional A*algorithm, eliminates redundant nodes, and smoothes the path.
- (2)
- Considering the phenomenon that the APF algorithm can easily fall into local loops, an artificial potential field multi-target points (MPAPF) approach is proposed. The global path derived by the A* algorithm is divided into multi-target points, and MPAPF is used to optimize each target point locally to obtain an optimal path.
- (3)
- In route planning, the collision risk factor (CRI) is introduced, and, under the rules proposed by the International Maritime Organization (IMO), the CRI value of each segment is continuously calculated to ensure that a safe, economical, and reliable route is found.
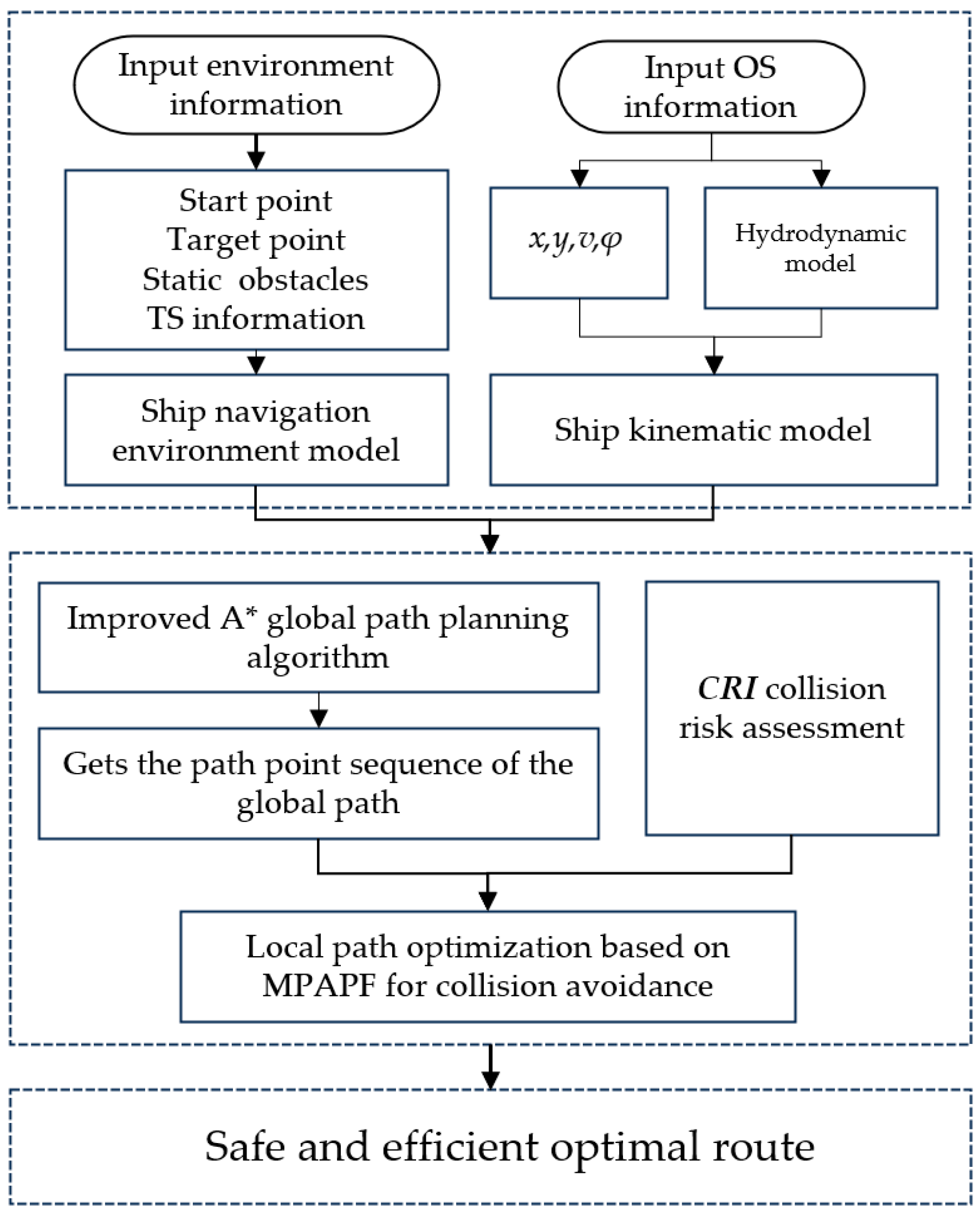
2. Methods
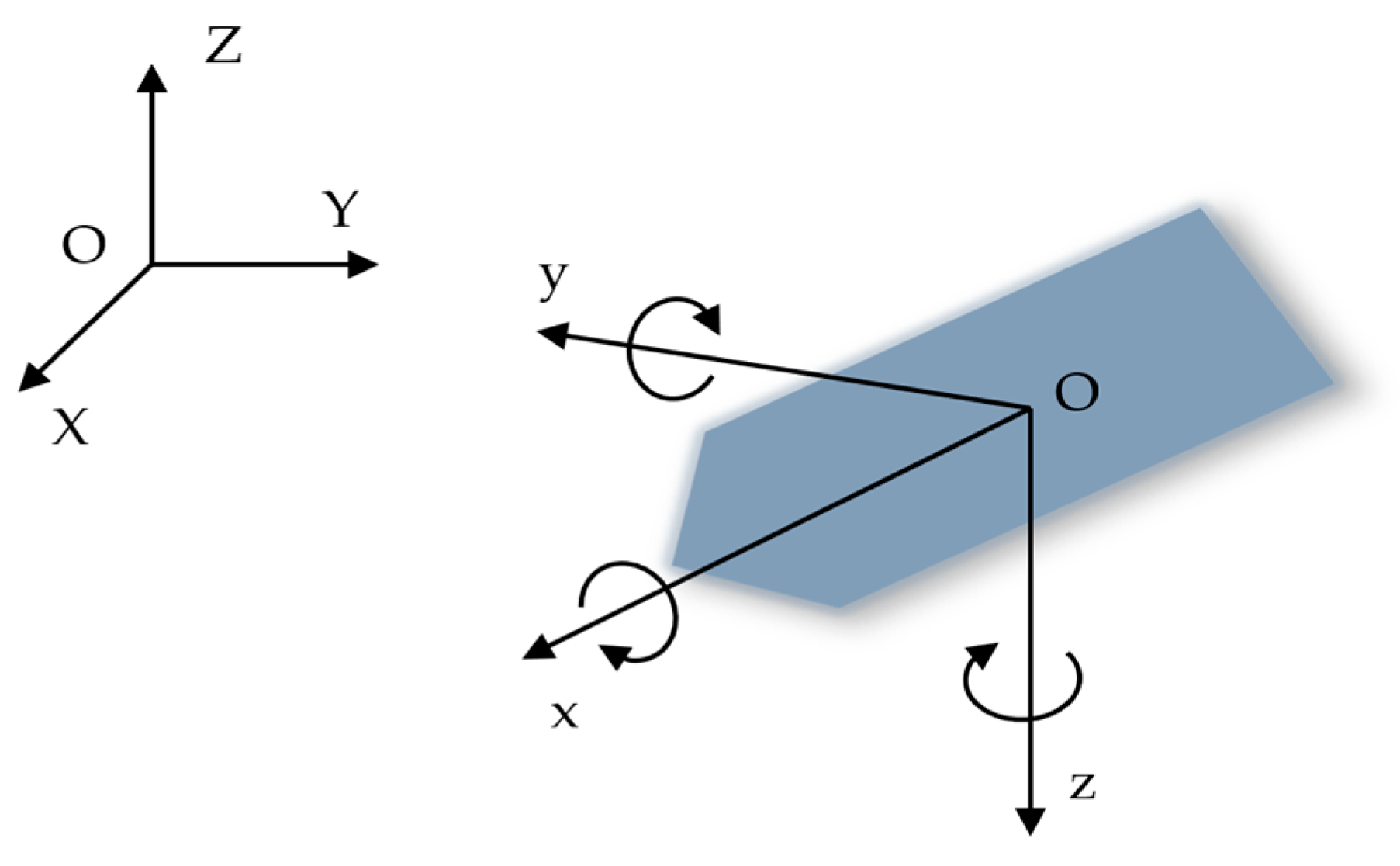
2.1. Ship Motion Model
2.2. Ship Path Planning Algorithm
2.2.1. Improved A* Global Path Optimization Algorithm
2.2.2. Hybrid Improved A* and Multi-Target Point Artificial Potential Field Algorithm
3. Experiments
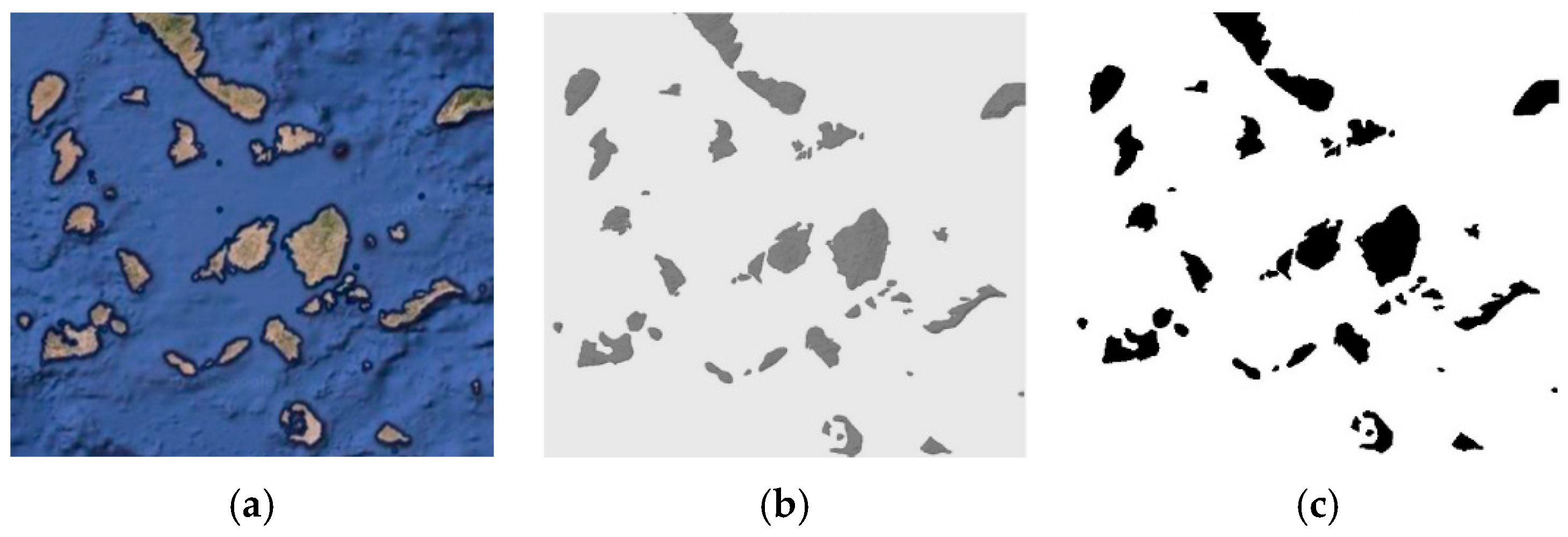
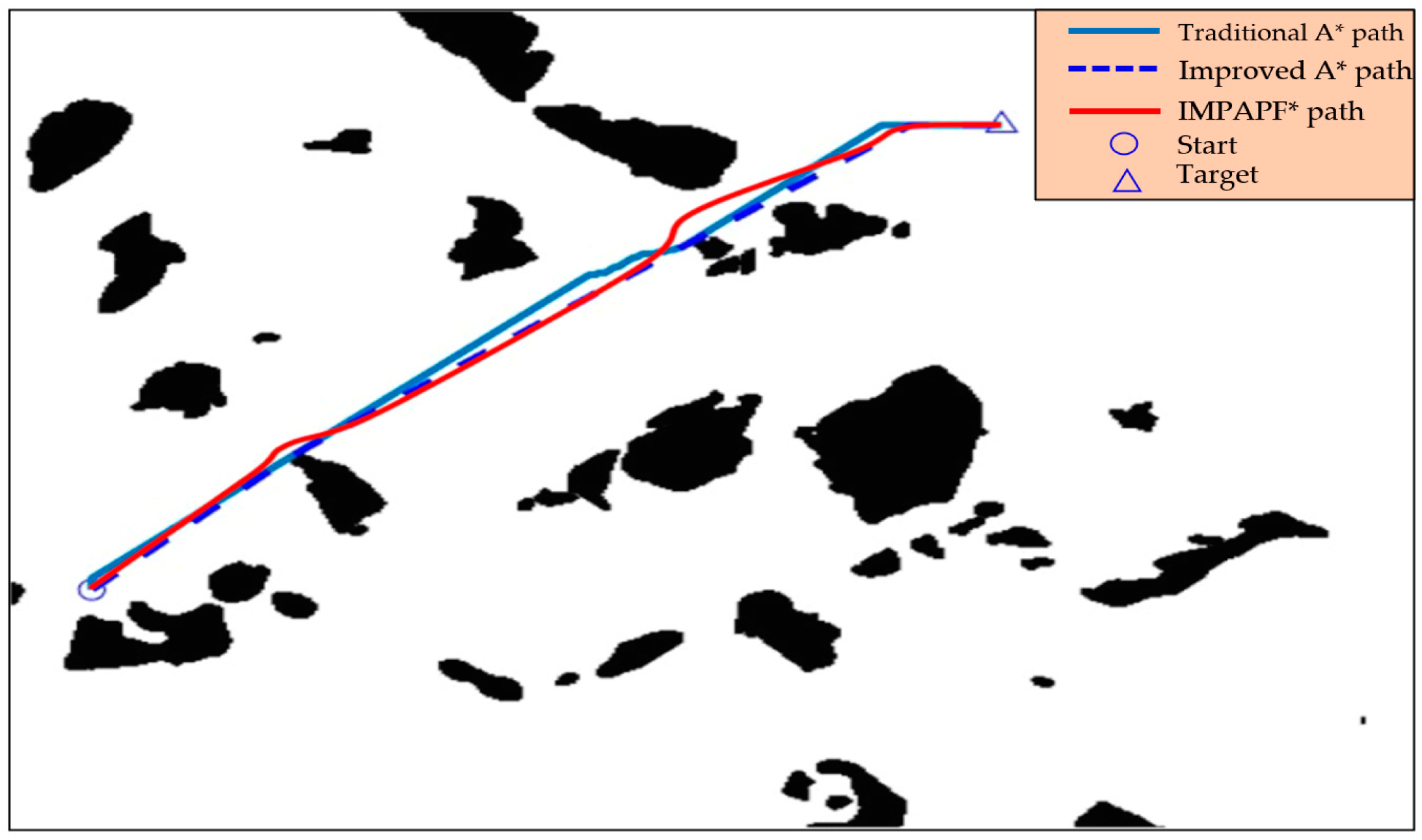
3.1. Static Sea Environment Path Planning
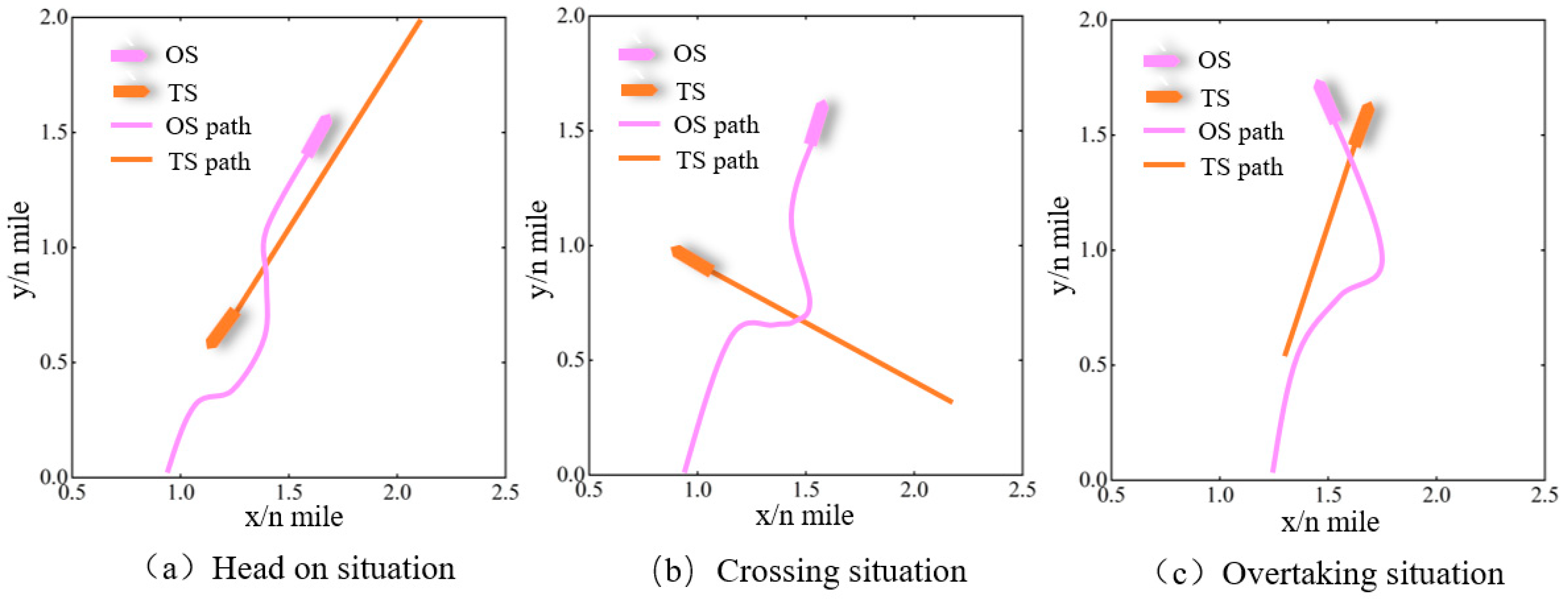
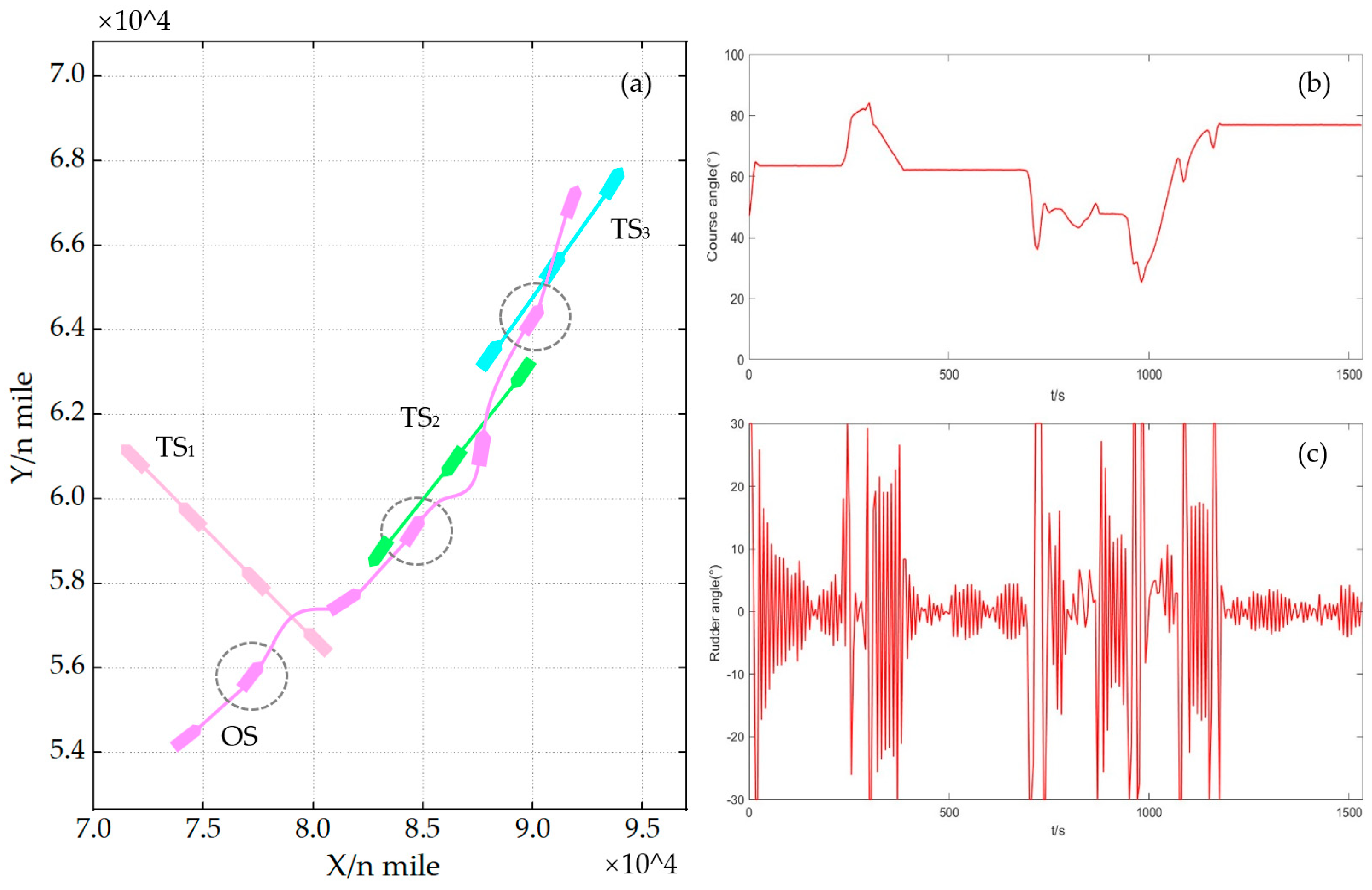
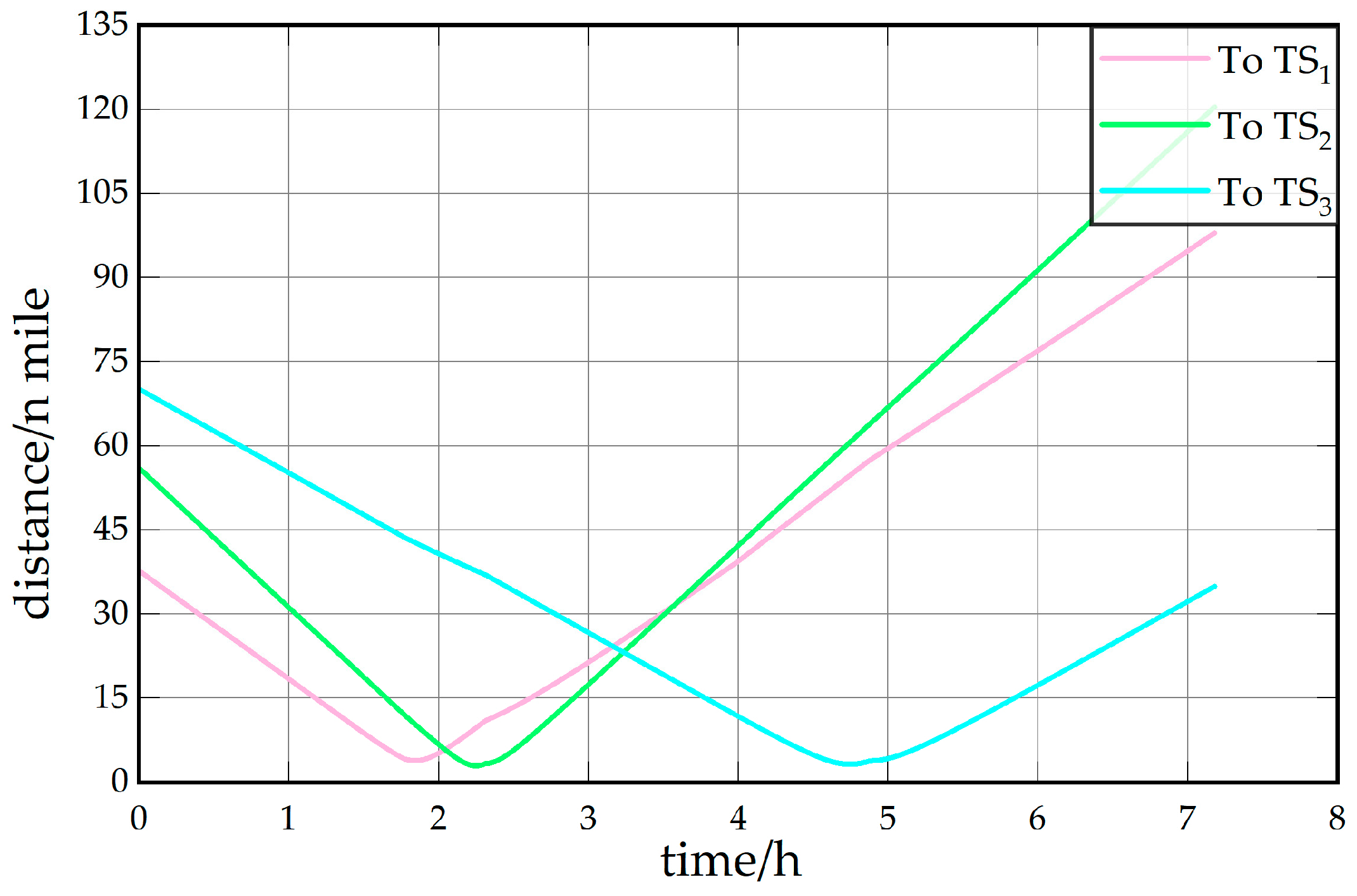
3.2. Ship Collision Avoidance Decision
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yan, X.P.; Wang, S.-W.; Ma, F.; Liu, Y.C.; Wang, J. A novel path planning approach for smart cargo ships based on anisotropic fast marching. Expert Syst. Appl. 2020, 159, 113558. [Google Scholar] [CrossRef]
- Sawada, R.; Sato, K.; Majima, T. Automatic ship collision avoidance using deep reinforcement learning with LSTM in continuous action spaces. J. Mar. Sci. Technol. 2021, 26, 509–524. [Google Scholar] [CrossRef]
- Öztürk, Ü.; Akdağ, M.; Ayabakan, T. A review of path planning algorithms in maritime autonomous surface ships: Navigation safety perspective. Ocean Eng. 2022, 251, 111010. [Google Scholar] [CrossRef]
- Sukumar, N.; Srivastava, A. Exact imposition of boundary conditions with distance functions in physics-informed deep neural networks. Comput. Methods Appl. Mech. Eng. 2022, 389, 114333. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, Z.; Zhu, Q.; Ma, S. Ship route planning based on double-cycling genetic algorithm considering ship maneuverability constraint. IEEE Access 2020, 8, 190746–190759. [Google Scholar] [CrossRef]
- Machmudah, A.; Shanmugavel, M.; Parman, S.; Manan TS, A.; Dutykh, D.; Beddu, S.; Rajabi, A. Flight trajectories optimization of fixed-wing UAV by bank-turn mechanism. Drones 2022, 6, 69. [Google Scholar] [CrossRef]
- Yuan, Q.; Wang, S.; Zhao, J.; Hsieh, T.H.; Sun, Z.; Liu, B. Uncertainty-informed ship voyage optimization approach for exploiting safety, energy saving and low carbon routes. Ocean Eng. 2022, 266, 112887. [Google Scholar] [CrossRef]
- Lee, S.M.; Roh, M.I.; Kim, K.S.; Jung, H.; Park, J.J. Method for a simultaneous determination of the path and the speed for ship route planning problems. Ocean Eng. 2018, 157, 301–312. [Google Scholar] [CrossRef]
- Sedeño-Noda, A.; Colebrook, M. A biobjective Dijkstra algorithm. Eur. J. Oper. Res. 2019, 276, 106–118. [Google Scholar] [CrossRef]
- Padhy, C.P.; Sen, D.; Bhaskaran, P.K. Application of wave model for weather routing of ships in the North Indian Ocean. Nat. Hazards 2008, 44, 373–385. [Google Scholar] [CrossRef]
- Oyekanlu, E.A.; Smith, A.C.; Thomas, W.P.; Mulroy, G.; Hitesh, D.; Ramsey, M.; Sun, D. A review of recent advances in automated guided vehicle technologies: Integration challenges and research areas for 5G-based smart manufacturing applications. IEEE Access 2020, 8, 202312–202353. [Google Scholar] [CrossRef]
- Grifoll, M.; Borén, C.; Castells-Sanabra, M. A comprehensive ship weather routing system using CMEMS products and A* algorithm. Ocean Eng. 2022, 255, 111427. [Google Scholar] [CrossRef]
- Miao, T.; El Amam, E.; Slaets, P.; Pissoort, D. An improved real-time collision-avoidance algorithm based on Hybrid A* in a multi-object-encountering scenario for autonomous surface vessels. Ocean Eng. 2022, 255, 111406. [Google Scholar] [CrossRef]
- Lan, X.; Lv, X.; Liu, W.; He, Y.; Zhang, X. Research on robot global path planning based on improved A-star ant colony algorithm. In Proceedings of the 2021 IEEE 5th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 March 2021; Volume 5, pp. 613–617. [Google Scholar] [CrossRef]
- Zhang, M.; Ren, H.; Zhou, Y. Research on global ship path planning method based on improved ant colony algorithm. IEEE Open J. Intell. Transp. Syst. 2023, 4, 143–152. [Google Scholar] [CrossRef]
- Singh, Y.; Sharma, S.; Sutton, R.; Hatton, D.; Khan, A. A constrained A* approach towards optimal path planning for an unmanned surface vehicle in a maritime environment containing dynamic obstacles and ocean currents. Ocean Eng. 2018, 169, 187–201. [Google Scholar] [CrossRef]
- He, Z.; Liu, C.; Chu, X.; Negenborn, R.R.; Wu, Q. Dynamic anti-collision A-star algorithm for multi-ship encounter situations. Appl. Ocean. Res. 2022, 118, 102995. [Google Scholar] [CrossRef]
- Kim, D.; Kim, J.S.; Kim, J.H.; Im, N.K. Development of ship collision avoidance system and sea trial test for autonomous ship. Ocean. Eng. 2022, 266, 113120. [Google Scholar] [CrossRef]
- Lee, H.T.; Choi, H.M.; Lee, J.S.; Yang, H.; Cho, I.S. Generation of Ship’s passage plan using data-driven shortest path algorithms. IEEE Access 2022, 10, 126217–126231. [Google Scholar] [CrossRef]
- Chen, X.; Wei, C.; Yang, Y.; Luo, L.; Biancardo, S.A.; Mei, X. Personnel trajectory extraction from port-like videos under varied rainy interferences. IEEE Trans. Intell. Transp. Syst. 2024, 25, 6567–6579. [Google Scholar] [CrossRef]
- Asl, A.N.; Menhaj, M.B.; Sajedin, A. Control of leader–follower formation and path planning of mobile robots using Asexual Reproduction Optimization (ARO). Appl. Soft Comput. 2014, 14, 563–576. [Google Scholar] [CrossRef]
- Jovanović, I.; Perčić, M.; BahooToroody, A.; Fan, A.; Vladimir, N. Review of research progress of autonomous and unmanned shipping and identification of future research directions. J. Mar. Eng. Technol. 2024, 23, 82–97. [Google Scholar] [CrossRef]
- Wang, X.; Feng, K.; Wang, G.; Wang, Q. Local path optimization method for unmanned ship based on particle swarm acceleration calculation and dynamic optimal control. Appl. Ocean. Res. 2021, 110, 102588. [Google Scholar] [CrossRef]
- Lyu, H.; Yin, Y. COLREGS-constrained real-time path planning for autonomous ships using modified artificial potential fields. J. Navig. 2019, 72, 588–608. [Google Scholar] [CrossRef]
- Lazarowska, A. A discrete artificial potential field for ship trajectory planning. J. Navig. 2020, 73, 233–251. [Google Scholar] [CrossRef]
- Bayat, F.; Najafinia, S.; Aliyari, M. Mobile robots path planning: Electrostatic potential field approach. Expert Syst. Appl. 2018, 100, 68–78. [Google Scholar] [CrossRef]
- Gao, J.; Xu, X.; Pu, Q.; Petrovic, P.B.; Rodić, A.; Wang, Z. A Hybrid Path Planning Method Based on Improved A* and CSA-APF Algorithms. IEEE Access 2024, 12, 39139–39151. [Google Scholar] [CrossRef]
- Mousazadeh, H.; Jafarbiglu, H.; Abdolmaleki, H.; Omrani, E.; Monhaseri, F.; Abdollahzadeh, M.R.; Makhsoos, A. Developing a navigation, guidance and obstacle avoidance algorithm for an Unmanned Surface Vehicle (USV) by algorithms fusion. Ocean Eng. 2018, 159, 56–65. [Google Scholar] [CrossRef]
- Zaccone, R. COLREG-compliant optimal path planning for real-time guidance and control of autonomous ships. J. Mar. Sci. Eng. 2021, 9, 405. [Google Scholar] [CrossRef]
- Liu, Z.; Cui, J.; Meng, F.; Xie, H.; Dan, Y.; Li, B. Research on Intelligent Ship Route Planning Based on the Adaptive Step Size Informed-RRT* Algorithm. J. Marine. Sci. Appl. 2024. [Google Scholar] [CrossRef]
- Zhao, W.; Wang, H.; Geng, J.; Hu, W.; Zhang, Z.; Zhang, G. Multi-objective weather routing algorithm for ships based on hybrid particle swarm optimization. J. Ocean. Univ. China 2022, 21, 28–38. [Google Scholar] [CrossRef]
- Almasan, P.; Suárez-Varela, J.; Rusek, K.; Barlet-Ros, P.; Cabellos-Aparicio, A. Deep reinforcement learning meets graph neural networks: Exploring a routing optimization use case. Comput. Commun. 2022, 196, 184–194. [Google Scholar] [CrossRef]
- Chen, X.; Dou, S.; Song, T.; Wu, H.; Sun, Y.; Xian, J. Spatial-Temporal Ship Pollution Distribution Exploitation and Harbor Environmental Impact Analysis via Large-Scale AIS Data. J. Mar. Sci. Eng. 2024, 12, 960. [Google Scholar] [CrossRef]
- Sang, H.; You, Y.; Sun, X.; Zhou, Y.; Liu, F. The hybrid path planning algorithm based on improved A* and artificial potential field for unmanned surface vehicle formations. Ocean. Eng. 2021, 223, 108709. [Google Scholar] [CrossRef]
- Liang, C.; Zhang, X.; Watanabe, Y.; Deng, Y. Autonomous collision avoidance of unmanned surface vehicles based on improved A star and minimum course alteration algorithms. Appl. Ocean. Res. 2021, 113, 102755. [Google Scholar] [CrossRef]
- Moradi, M.H.; Brutsche, M.; Wenig, M.; Wagner, U.; Koch, T. Marine route optimization using reinforcement learning approach to reduce fuel consumption and consequently minimize CO2 emissions. Ocean Eng. 2022, 259, 111882. [Google Scholar] [CrossRef]
- Seo, C.; Noh, Y.; Abebe, M.; Kang, Y.J.; Park, S.; Kwon, C. Ship collision avoidance route planning using CRI-based A∗ algorithm. Int. J. Nav. Arch. Ocean Eng. 2022, 15, 100551. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Freedom | Force and Momentum | Linearity/Angular Velocity | Position/Attitude Angle |
|---|---|---|---|
| Surge | X | u | x |
| Sway | Y | v | y |
| Yaw | N | r |
| Method | Calculation Time/s | Steering Node | Path Length/n Mile |
|---|---|---|---|
| Traditional A* | 427.61 | 153 | 596.4 |
| Improved A* | 349.23 | 11 | 490.6 |
| IMPAPF* | 385.97 | 17 | 512.8 |
| Method | Calculation Time/s | Steering Node | Path Length/n Mile |
|---|---|---|---|
| Traditional A* | 235.55 | 267 | 73.9 |
| Improved A* | 133.86 | 7 | 59.4 |
| IMPAPF* | 167.16 | 12 | 63.5 |
| Names and Symbols | Value | Unit |
|---|---|---|
| Length | 116 | m |
| Width | 18 | m |
| Draft | 5.4 | m |
| Max rudder angle | 30 | ° |
| Speed | 10 | knot |
| Block coefficient | 0.56 | -it |
| Maneuverability index (K) | 0.31 | s−1 |
| Maneuverability index (T) | 62.4 | s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Y.; Zhao, S.; Zhao, S. Ship Trajectory Planning and Optimization via Ensemble Hybrid A* and Multi-Target Point Artificial Potential Field Model. J. Mar. Sci. Eng. 2024, 12, 1372. https://doi.org/10.3390/jmse12081372
Huang Y, Zhao S, Zhao S. Ship Trajectory Planning and Optimization via Ensemble Hybrid A* and Multi-Target Point Artificial Potential Field Model. Journal of Marine Science and Engineering. 2024; 12(8):1372. https://doi.org/10.3390/jmse12081372
Chicago/Turabian StyleHuang, Yanguo, Sishuo Zhao, and Shuling Zhao. 2024. "Ship Trajectory Planning and Optimization via Ensemble Hybrid A* and Multi-Target Point Artificial Potential Field Model" Journal of Marine Science and Engineering 12, no. 8: 1372. https://doi.org/10.3390/jmse12081372
APA StyleHuang, Y., Zhao, S., & Zhao, S. (2024). Ship Trajectory Planning and Optimization via Ensemble Hybrid A* and Multi-Target Point Artificial Potential Field Model. Journal of Marine Science and Engineering, 12(8), 1372. https://doi.org/10.3390/jmse12081372