
Numerical Simulation of Bionic Underwater Vehicle Morphology Drag Optimisation and Flow Field Noise Analysis

 ,
,  , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
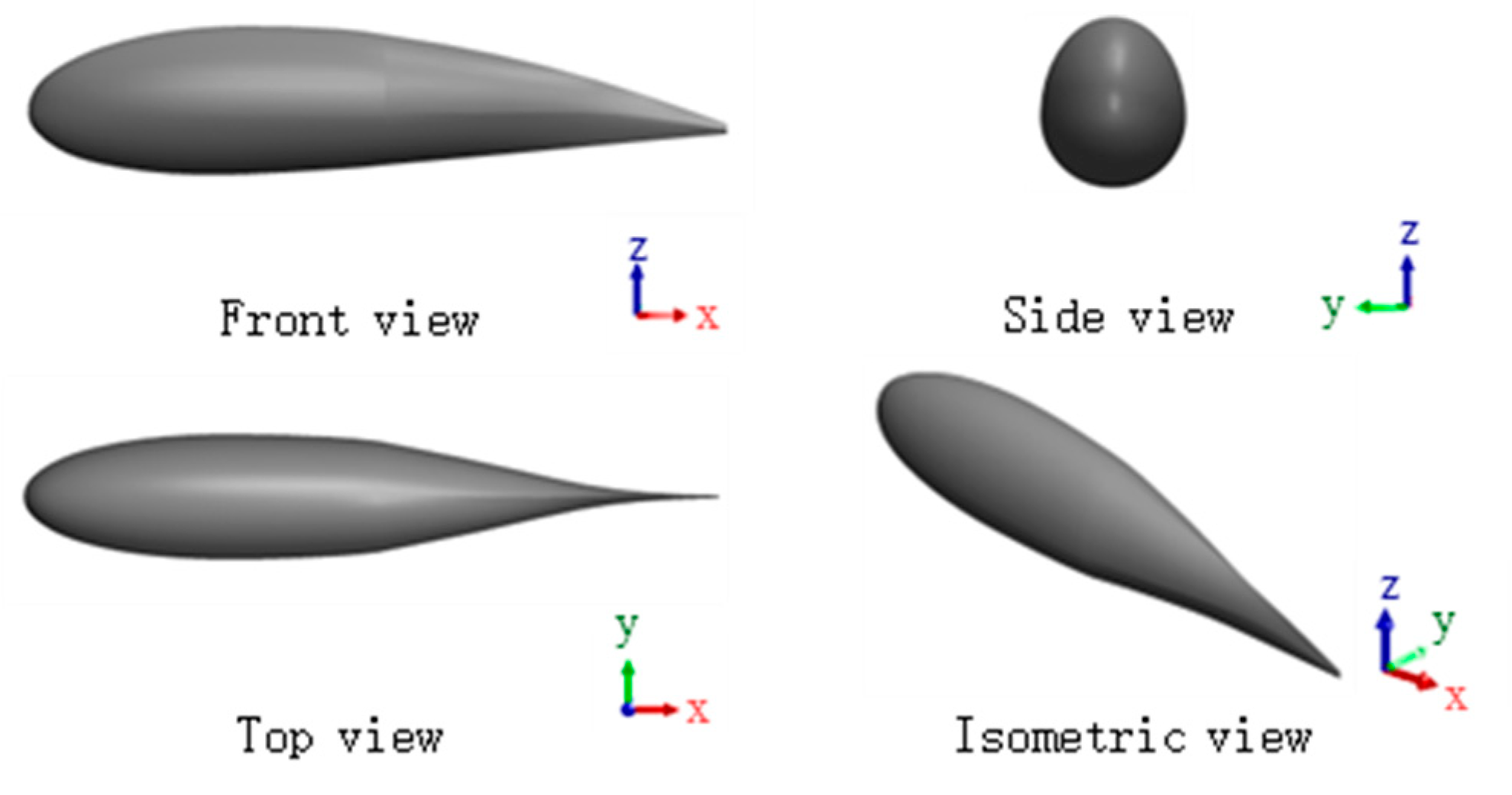
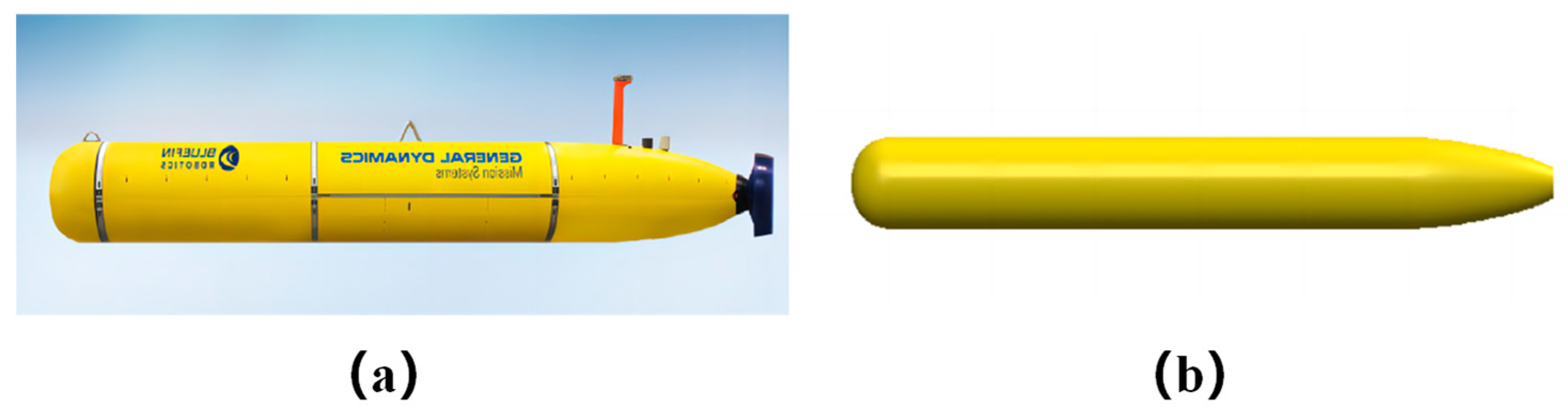
2.1. Test Models and Parameters
2.2. CFD Theory and Parameter Settings
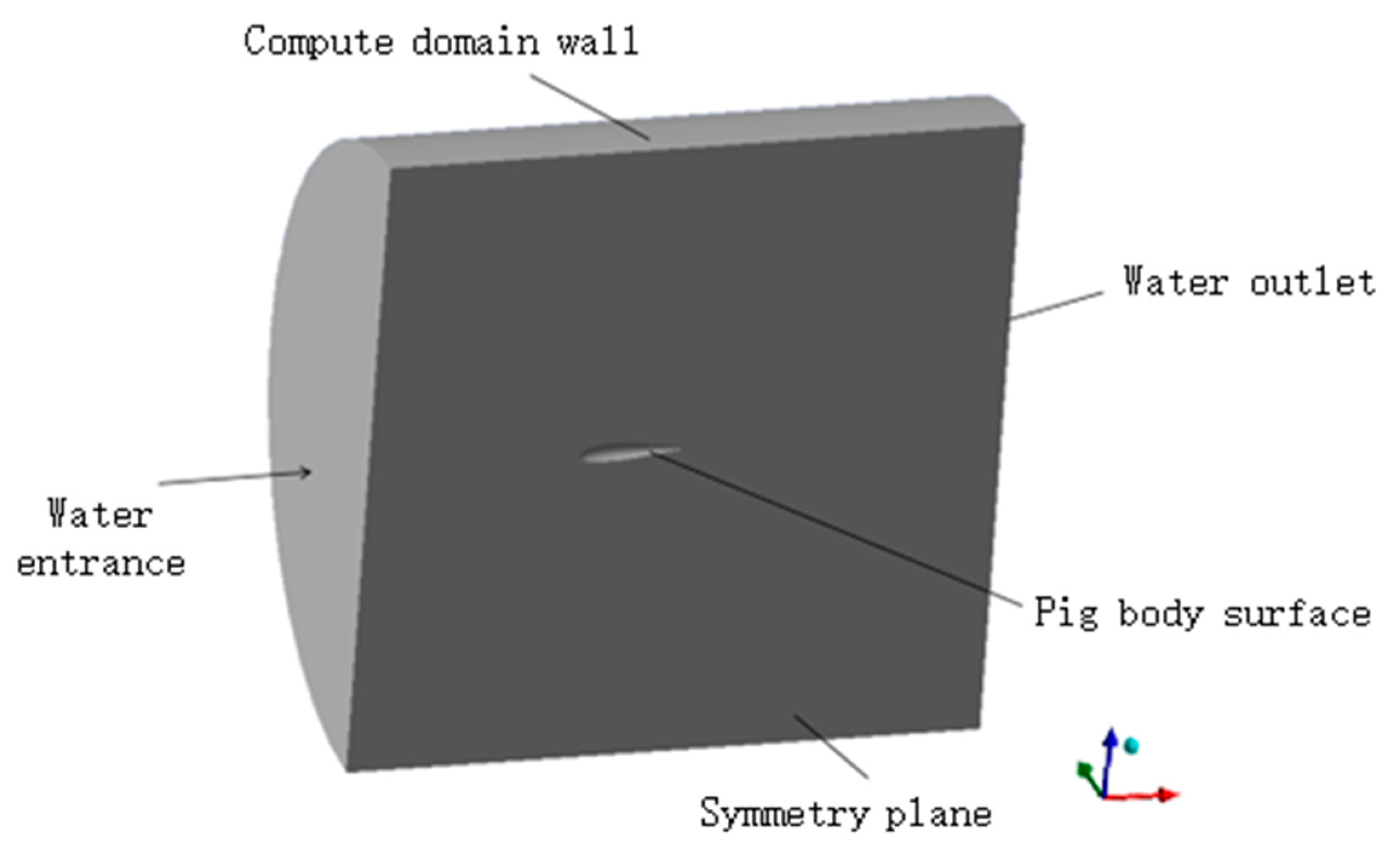
2.2.1. Computational Domain and Boundary Conditions
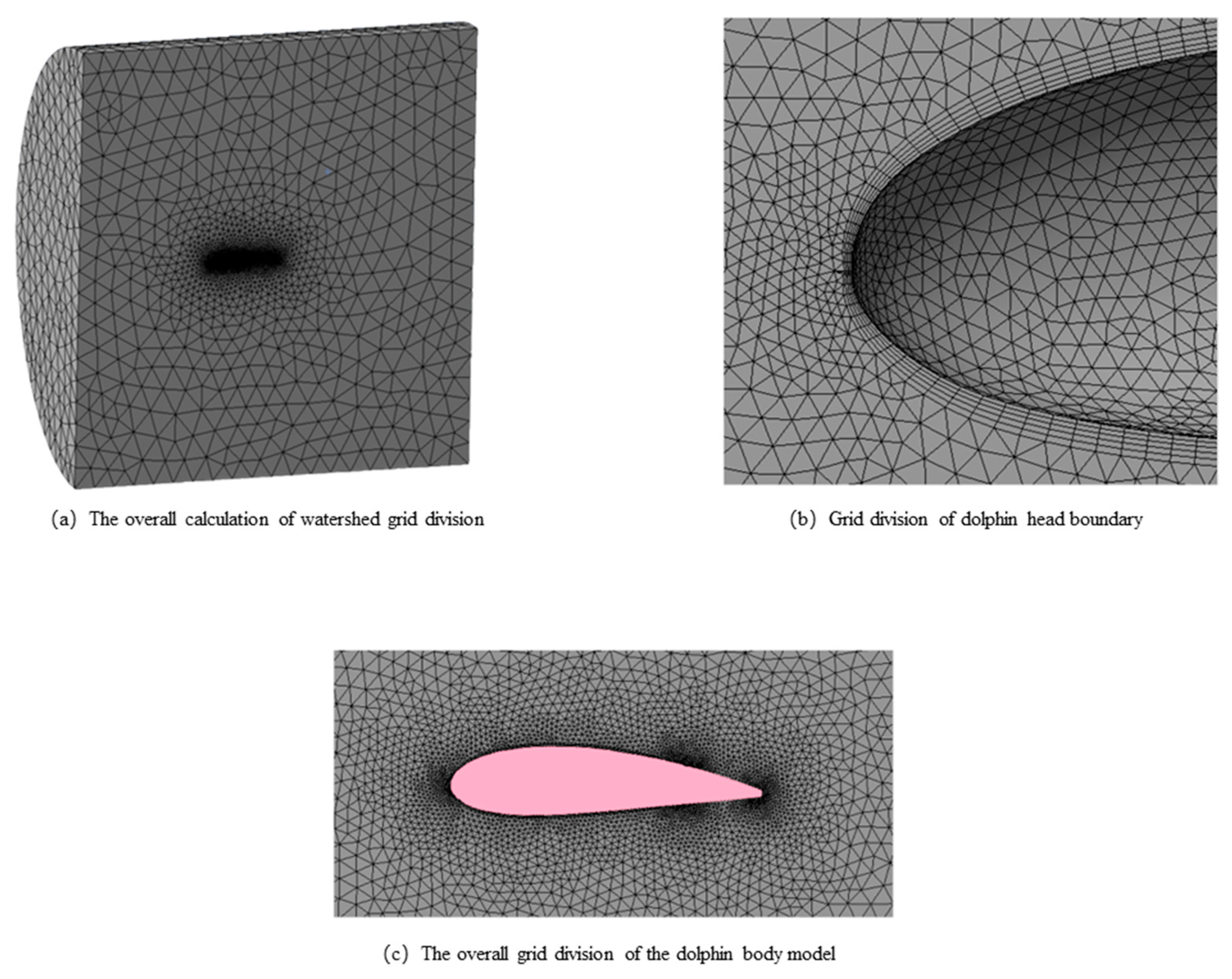
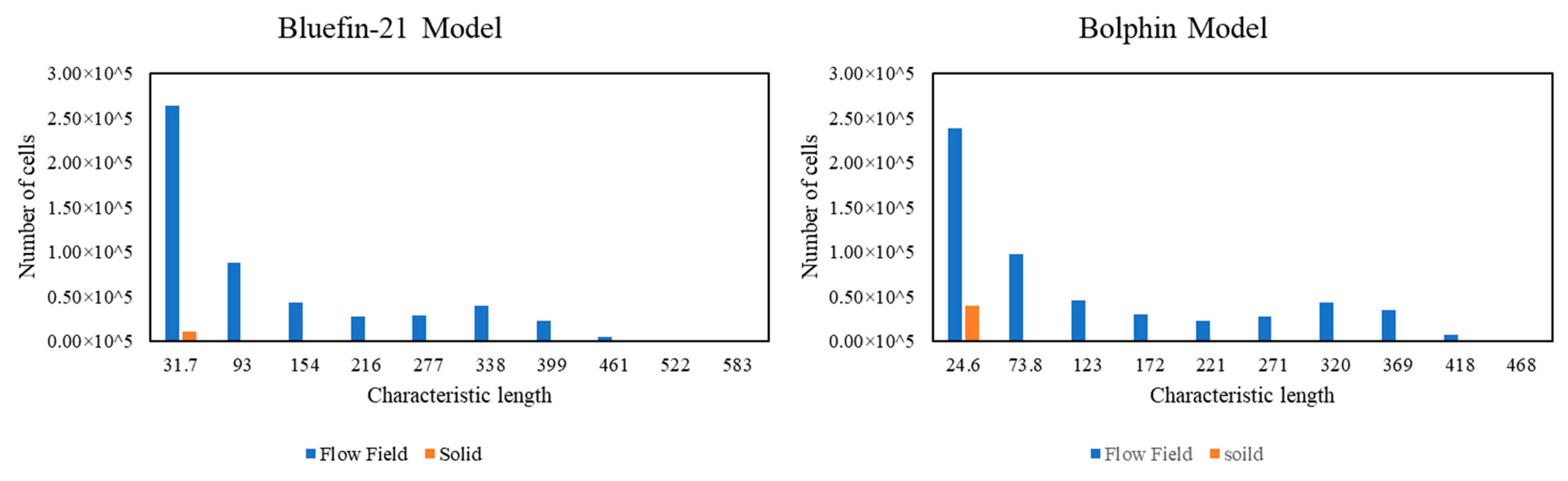
2.2.2. Mesh Parameter Settings
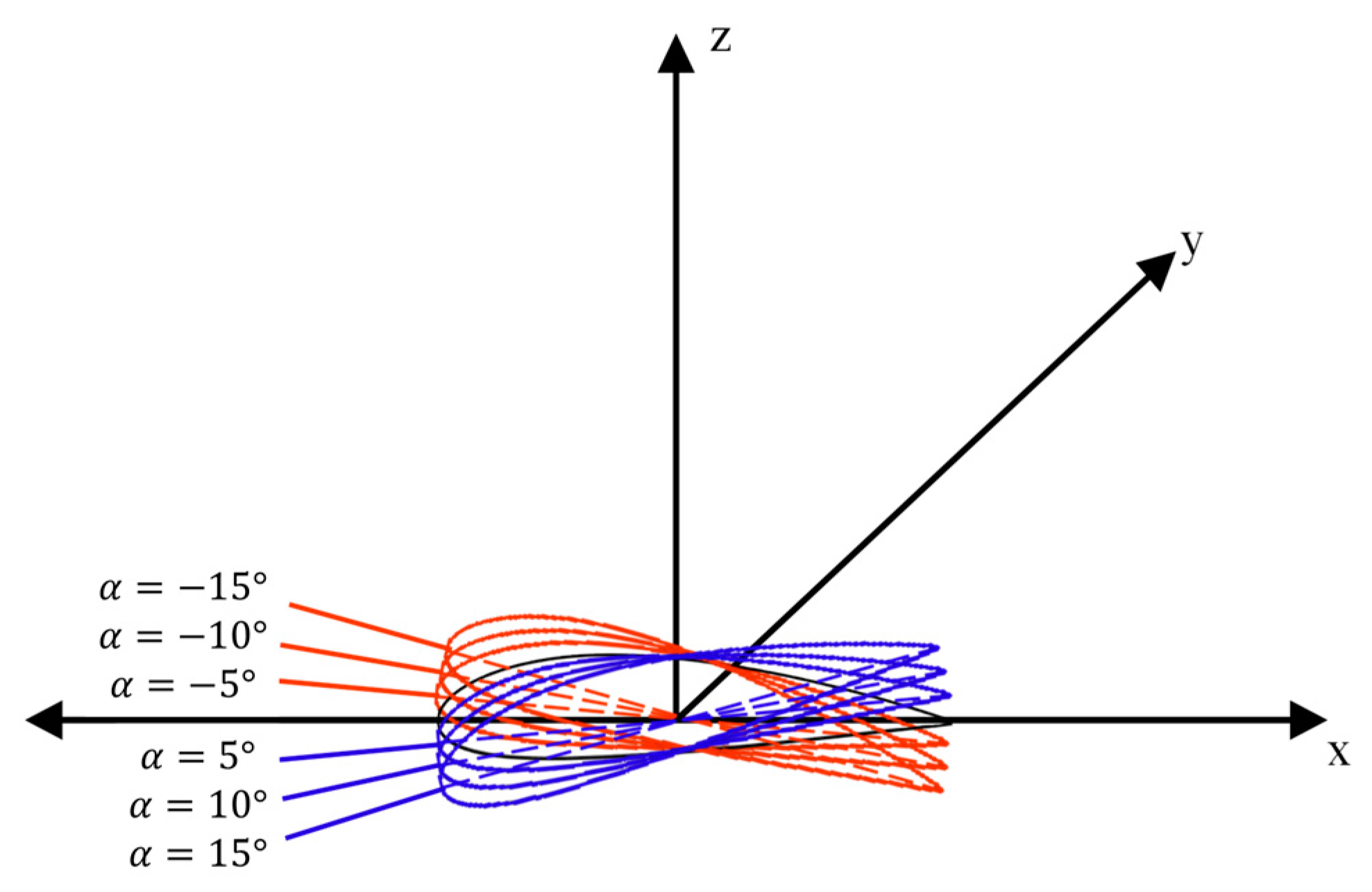
2.2.3. Setting of the Calculation Conditions
2.2.4. Hydrodynamic Coefficient Formula
2.3. Hydrodynamic Coefficient
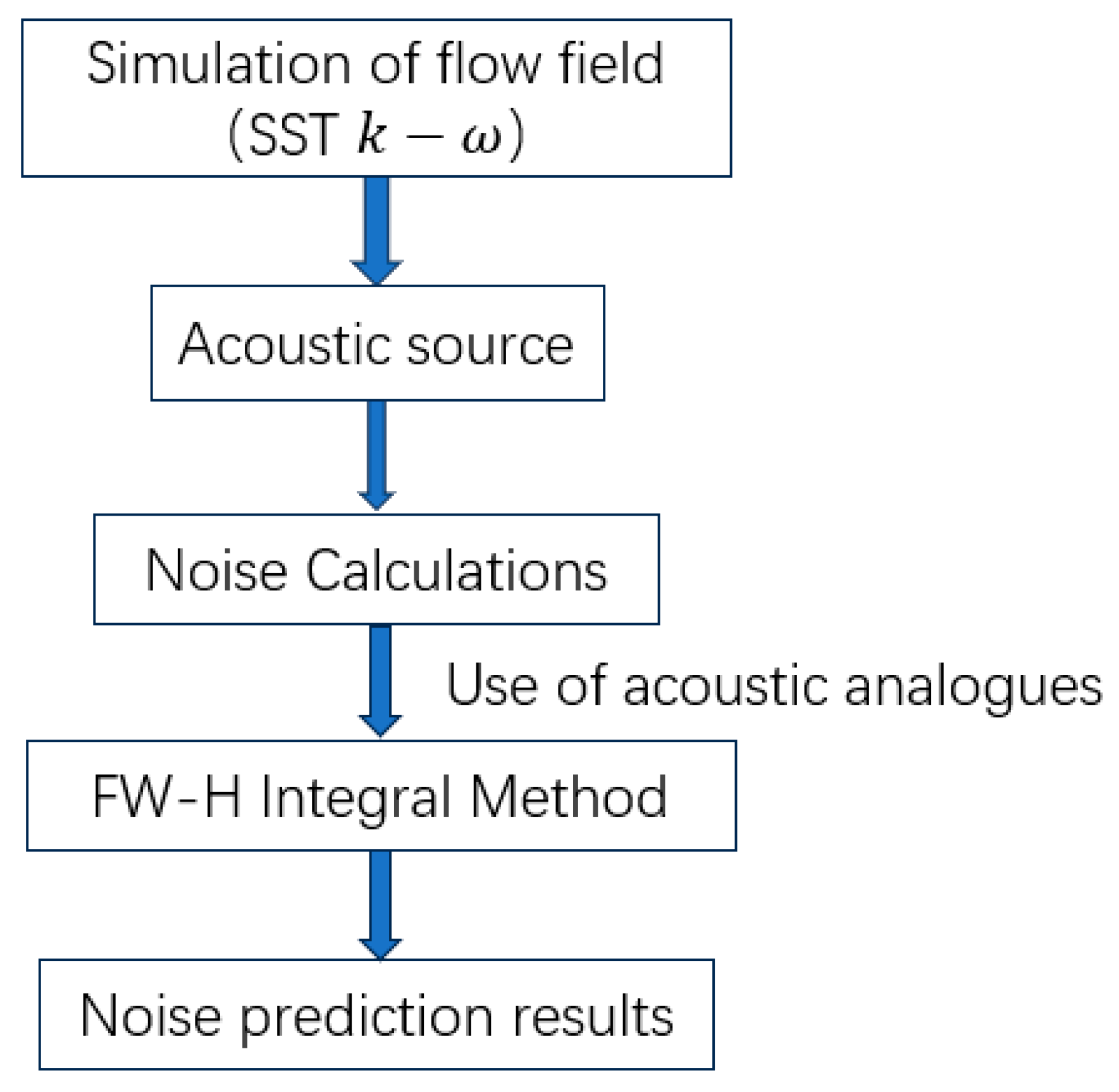
2.4. Numerical Simulation of Flow Field Noise and Calculation of the Working Conditions
3. Results
3.1. Numerical Simulation of the Drag of the Bionic Dolphin
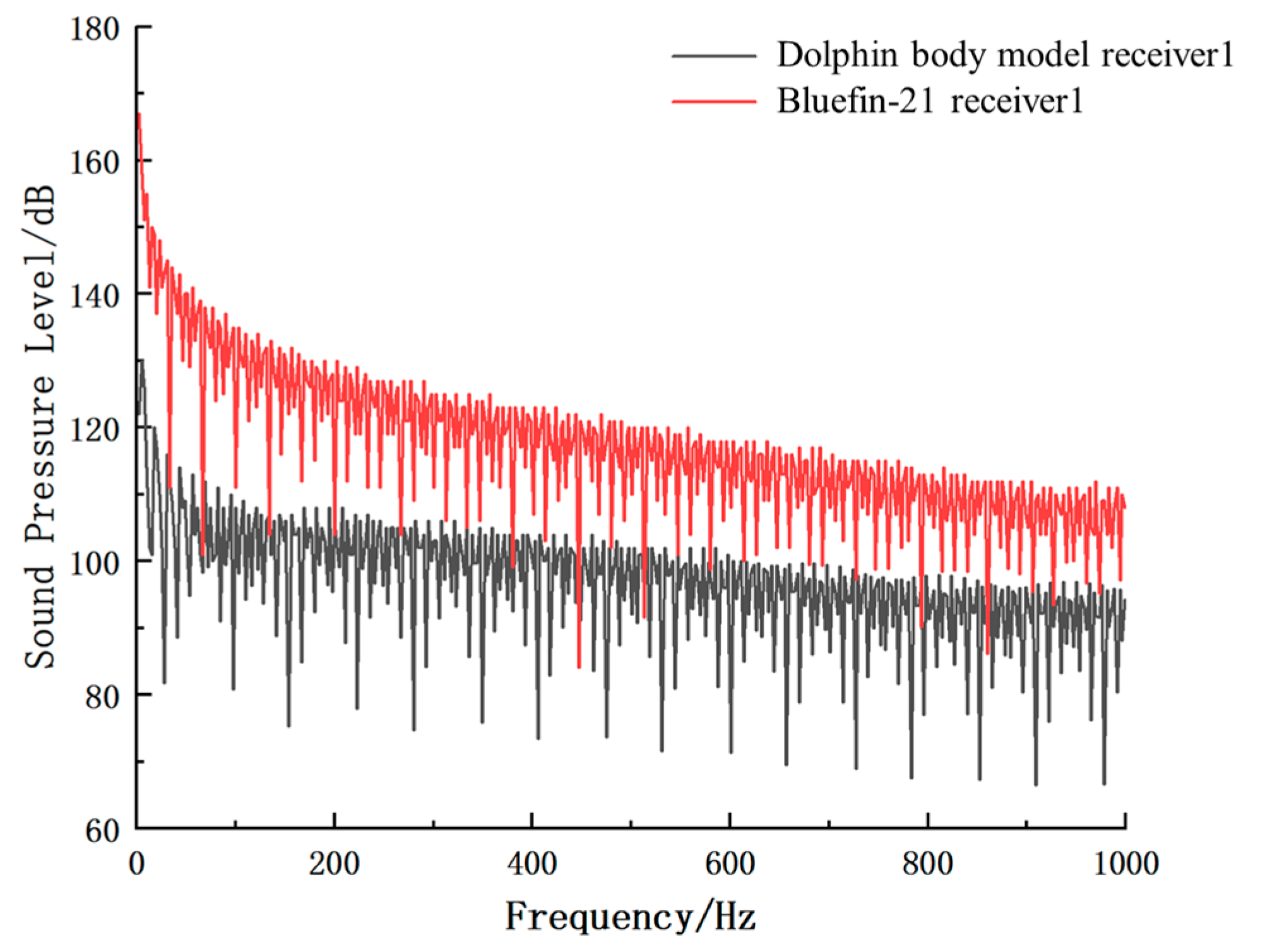
3.2. Comparison of the Morphometric Resistance between the Bionic Dolphin and Bluefin-21 Model
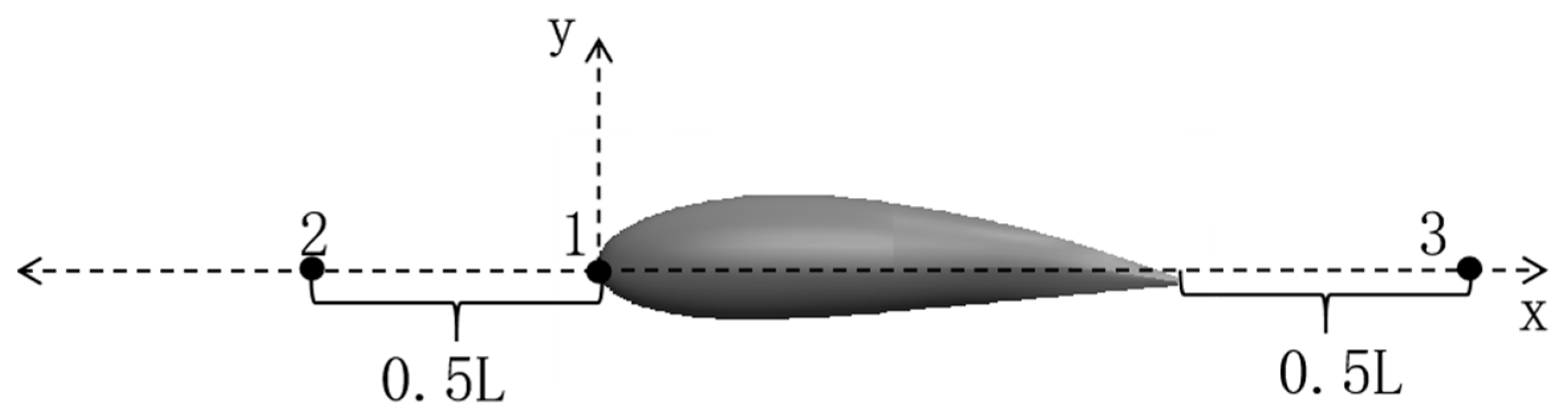
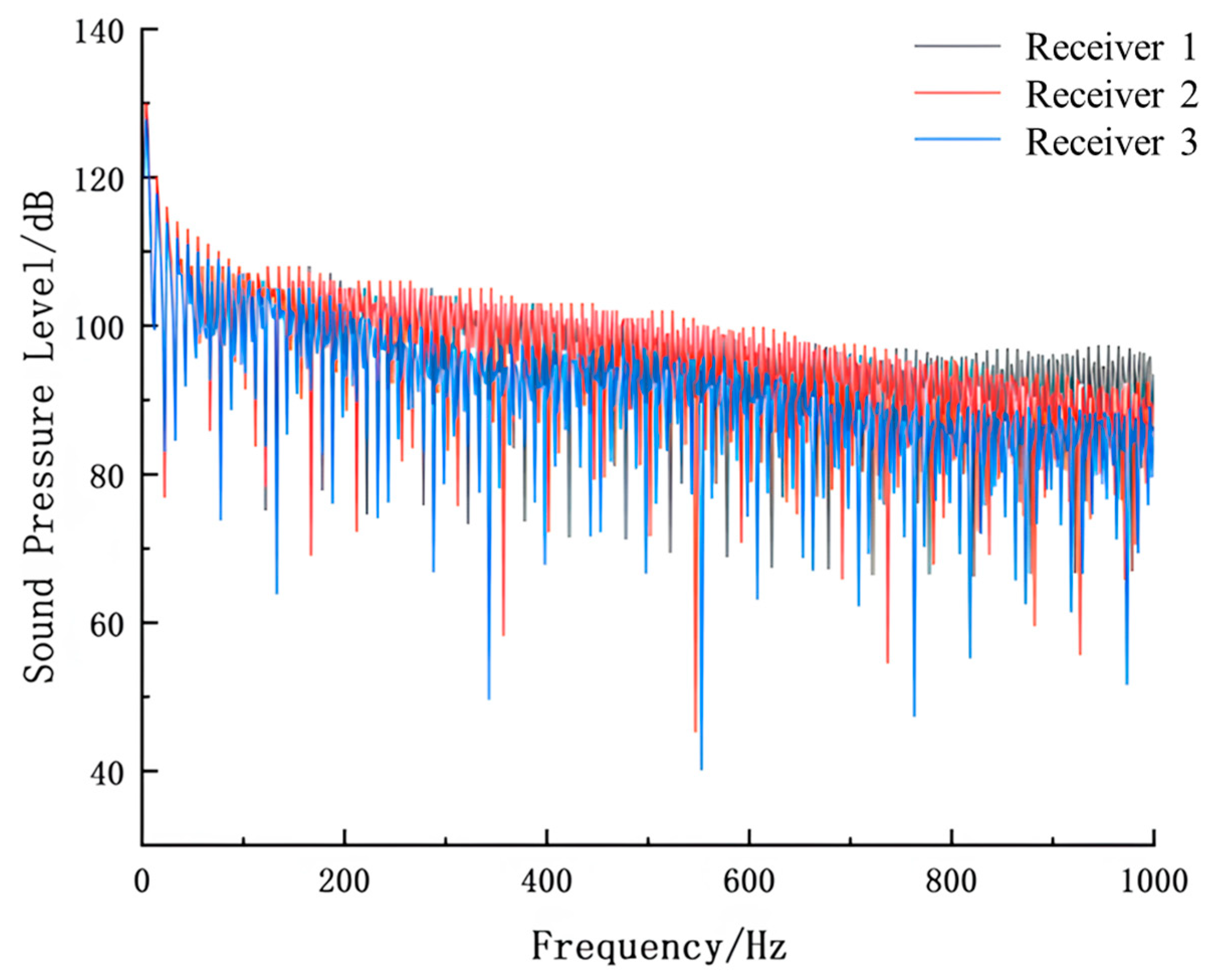
3.3. Flow Field Noise Analysis for the Bionic Dolphin
4. Discussion
4.1. Optimisation of the Morphological Construction of Bionic Underwater Submersibles
4.2. Investigation of the Drag Reduction Mechanism of Bionic Underwater Submersibles
4.3. Mechanisms for Optimising Noise in the Flow Field of Bionic Underwater Submersibles
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kong, X.; Huang, X.; Liu, F.; Li, B.; Wang, J.; Liu, B.; Chen, X. Design and implementation of a device based on the integration of bionic finless porpoise fish. Fish. Mod. 2021, 48, 18–25. [Google Scholar]
- Zhang, X.; Yang, K.; Sun, Y.; Cui, H.; Jiang, J. Mechanism design of a bionic fish deep-sea exploration robot. Mechanical 2022, 49, 68–73. [Google Scholar]
- Zhang, Y.; Li, P.; Wei, B.; Qin, H. Resistance calculation and structural design of underwater vehicle. Appl. Sci. Technol. 2023, 50, 141–148. [Google Scholar]
- Du, X.; Shi, X.; Shi, J. Optimal design of underwater vehicle shell shape. Mech. Des. Manuf. 2005, 08, 988–990. [Google Scholar]
- Kou, G.; Yin, H.; Dong, G.; Zhou, Y. Research on the optimal design of submarine missile package line. Shipbuild. Technol. 2012, 2, 13–17. [Google Scholar]
- Miao, Y.; Takarata; Liu, F.; Peng, D. Shape robustness optimization of underwater vehicle based on parameterization. J. Harbin Eng. Univ. 2018, 39, 622–628. [Google Scholar]
- Liu, F.; Liang, X.; Miao, Y.; Tu, C.; Zhao, Y. Parametric analysis and optimization of drag of underwater vehicles. J. Unmanned Underw. Syst. 2020, 28, 526–531. [Google Scholar]
- Jiang, Y.; Zhao, Y.; Xiong, J.; Yang, Y.; Zhang, G. Comprehensive effects of hull shape on drag and flow noise of underwater vehicles. J. Harbin Eng. Univ. 2022, 43, 76–82+138. [Google Scholar]
- Panda, J.P.; Mitra, A.; Warrior, H.V. A review on the hydrodynamic characteristics of autonomous underwater vehicles. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2020, 235, 15–29. [Google Scholar] [CrossRef]
- Vardhan, H.; Sztipanovits, J. Search for Universal Minimum Drag Resistance Underwater Vehicle Hull Using CFD. In Computational and Experimental Simulations in Engineering; Springer: Cham, Switzerland, 2024; pp. 1297–1303. [Google Scholar]
- Lingshuai, M.; Lin, Y.; Xu, H.; Gu, H. Effects of front shapes of mini revolving AUV on sailing resistance characteristics. In Proceedings of the 2015 IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015; pp. 1795–1799. [Google Scholar]
- Khalin, A.; Kizilova, N. Performance comparison of different aerodynamic shapes for autonomous underwater vehicles. Arch. Mech. Eng. 2019, 66, 171–189. [Google Scholar] [CrossRef]
- Chen, Y.; Zhou, L. Bionics and the development of weapons and equipment. Mod. Weapons 1989, 6, 9–12. [Google Scholar]
- Yu, J.; Wu, Z. Natural Inspiration Technology Inspiration, Bionic Improves Maneuverability: Interpretation of “Design and Control Technology of High Mobility Bionic Robot Fish”. China Mech. Eng. 2019, 4, 498–503. [Google Scholar]
- Huang, S.; Hu, Y.; Wang, Y. Research on aerodynamic performance of a novel dolphin head-shaped bionic airfoil. Energy 2021, 214, 118179. [Google Scholar] [CrossRef]
- Zhou, K.; Liu, J.; Chen, W. Numerical Study on Hydrodynamic Performance of Bionic Caudal Fin. Appl. Sci. 2016, 6, 15. [Google Scholar] [CrossRef]
- Liu, H. Research on Autonomous Swimming of Tuna-like Underwater Robot. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2017. [Google Scholar]
- Liu, X.; Qiu, J.; Wu, X. License Plate Localization Algorithm Based on Deep Learning and Color Edge Features. Comput. Eng. Des. 2020, 41, 2942–2948. [Google Scholar] [CrossRef]
- Zhang, S. Discussion on the goodness-of-fit index of curve regression. Chin. J. Health Stat. 2002, 1, 9–11. [Google Scholar]
- Liu, F.; Zou, J.; Zheng, Y. The influence of physical parameters of the synthetic jet on the control of airfoil flow separation. J. ZheJiang Univ. 2013, 47, 146–153. [Google Scholar]
- Jefferson, T.A. D—Dall’s Porpoise Phocoenoides dalli. In Encyclopedia of Marine Mammals, 2nd ed.; Perrin, W.F., Würsig, B., Thewissen, J.G.M., Eds.; Academic Press: London, UK, 2009; pp. 296–298. [Google Scholar]
- LeHardy, P.K.; Moore, C. Deep ocean search for Malaysia airlines flight 370. In Proceedings of the 2014 Oceans—St. John’s, St. John’s, NL, Canada, 14–19 September 2014; pp. 1–4. [Google Scholar]
- Deep-Sea Tracker—“Bluefin” [EB/OL]. Available online: https://weibo.com/ttarticle/p/show?id=2309404266218138787588 (accessed on 27 July 2018).
- Liu, J. Improvement of the shear stress transport k-ω turbulence model in the compressible separated flow of slender projectiles. Sci. Technol. Eng. 2018, 18, 142–147. [Google Scholar]
- Cao, Q. Analysis of technical characteristics of “Bluefin Tuna-21” autonomous underwater vehicle. Electro-Opt. Syst. 2014, 2, 1–6. [Google Scholar]
- Xue, W.; Xiong, Y. Numerical simulation of the initial value problem of liquid sloshing based on shallow water wave theory. J. Dyn. Control 2015, 13, 308–313. [Google Scholar]
- Pan, D. Research on the Detection Principle Based on the Flow Field of Underwater Moving Bodies. Master’s Thesis, Beijing Institute of Technology, Beijing, China, 2020. [Google Scholar]
- He, J.; Wang, Y.; Liu, Q.; Qian, Z. Mechanism and suppression method of pseudosound generation of permeable convection FW-H equation. Chin. J. Aerodyn. 2023, 41, 16–25. [Google Scholar]
- Bose, T. Lighthill’s Theory of Aerodynamic Noise. In Aerodynamic Noise: An Introduction for Physicists and Engineers; Bose, T., Ed.; Springer: New York, NY, USA, 2013; pp. 53–60. [Google Scholar]
- Ribeiro, A.F.P.; Khorrami, M.R.; Ferris, R.; König, B.; Ravetta, P.A. Lessons learned on the use of data surfaces for Ffowcs Williams-Hawkings calculations: Airframe noise applications. Aerosp. Sci. Technol. 2023, 135, 108202. [Google Scholar] [CrossRef]
- Kopitz, J.; Polifke, W. CFD-based application of the Nyquist criterion to thermo-acoustic instabilities. J. Comput. Phys. 2008, 227, 6754–6778. [Google Scholar] [CrossRef]
- Song, W.; Wang, C.; Wei, Y.; Xu, H.; Lu, J. Experimental study on drag reduction characteristics of microbubbles in pitching motion of underwater vehicles. Acta Armamentarii Sin. 2019, 40, 1902–1910. [Google Scholar]
- Cao, K. Aerodynamic performance and noise study of variable-cross-section three-dimensional wing. Agric. Equip. Veh. Eng. 2023, 61, 114–119. [Google Scholar]
- Yu, L.; Zhao, W.; Wan, D. A review of the research and application progress of hydrodynamic noise calculation methods at water-gas interface. Chin. J. Ship Res. 2022, 17, 85–102. [Google Scholar] [CrossRef]
- Zhang, Q. Numerical Analysis and Study of Hydrodynamic Noise of an Underwater Vehicle. Master’s Thesis, Kunming University of Science and Technology, Kunming, China, 2022. [Google Scholar]
- Zhang, Y. The concept and technology development of autonomous underwater vehicle technology—Taking “bluefin-21” as an example. China Terminol. 2014, 16, 131. [Google Scholar]
- Zifan, W.; Qiang, Y.; Songlin, Y. Analysis of the Resistance Performance for Different Types of AUVs Based on CFD. Chin. Ship Res. 2014, 9, 28–37. [Google Scholar]
- Zhang, Y.; Song, Z.; Wang, X.; Cao, W.; Au, W.W. Directional acoustic wave manipulation by a porpoise via multiphase forehead structure. Phys. Rev. Appl. 2017, 8, 064002. [Google Scholar] [CrossRef]
- Feng, X.; Shen, Y.; Wang, D. A survey on the development of image data augmentation. Comput. Sci. Appl 2021, 11, 370–382. [Google Scholar]
- Mziou-Sallami, M.; Khalsi, R.; Smati, I.; Mhiri, S.; Ghorbel, F. DeepGCSS: A robust and explainable contour classifier providing generalized curvature scale space features. Neural Comput. Appl. 2023, 35, 17689–17700. [Google Scholar] [CrossRef]
- Tan, Z.; Zhang, C.; Sun, Z.; Gao, N.; Jia, Y.; Xie, G. A six-degree-of-freedom bionic machine dolphin. Ordnance Autom. 2022, 41, 25–29. [Google Scholar]
- Ma, Z.; Chen, R.; Qu, Y.; Kong, Y.; Hu, K.; Zhou, Q.; Xu, S.; Yan, Z.; Yang, Y.; He, H. Hydrodynamic control of silicone elastomers on between porous media. J. Ind. Text. 2024, 54, 15280837241227246. [Google Scholar] [CrossRef]
- Jurásková, A.; Olsen, S.M.; Skov, A.L. Reversible Dynamic Behavior of Condensation-Cured Silicone Elastomers Caused by a Catalyst. Macromol. Mater. Eng. 2023, 308, 2200615. [Google Scholar] [CrossRef]
- Li, W.; Desbrun, M. Fluid-Solid Coupling in Kinetic Two-Phase Flow Simulation. ACM T. Graph. 2023, 42, 123. [Google Scholar] [CrossRef]
- Xia, D.; Li, Z.; Lei, M.; Yan, H.; Zhou, Z. A comparative and collaborative study of the hydrodynamics of two swimming modes applicable to dolphins. Biomimetics 2023, 8, 311. [Google Scholar] [CrossRef] [PubMed]
- Zimmerman, R.; Spain, G.L.D.; Chadwell, C.D. Decreasing the radiated acoustic and vibration noise of a mid-size AUV. IEEE J. Ocean. Eng. 2005, 30, 179–187. [Google Scholar] [CrossRef]
- Zhang, C.; Song, Z.-C.; Zhang, Y. Sound reception pathway of the Indo-Pacific humpback dolphin. Acta Phys. Sin. 2020, 69, 202–209. [Google Scholar] [CrossRef]
- Zhang, L.; Fan, L.; Shen, L.; Zhang, J.; Sun, J.; Wang, C. Numerical simulation of head flow noise performance of underwater vehicle. Ship Sci. Technol. 2017, 39, 14–19. [Google Scholar]
- Liu, H. Flow-Induced Noise Characteristic Analysis of Submarine Flow Cavity Based on Large Eddy Simulation. In Proceedings of the ISOPE International Ocean and Polar Engineering Conference, Hangzhou, China, 11–16 October 2020; p. ISOPE–I-20-4197. [Google Scholar]
- Xu, J.; Fang, W.; Fan, W.; Wang, Q.; Gu, Y. The Research of the Drag Reduction of Non-Smooth Underwater Vehicle. Int. J. Fluid Dyn. 2024, 12, 121001. [Google Scholar] [CrossRef]
- Yu, Y. Numerical Investigation on Aerodynamic Performance of NACA0018 Airfoil Serrated Gurney Flap. Model. Simul. 2021, 10, 578–585. [Google Scholar] [CrossRef]
- Steenwijk, B.; Druetta, P. Numerical Study of Turbulent Flows over a NACA 0012 Airfoil: Insights into Its Performance and the Addition of a Slotted Flap. Appl. Sci. 2023, 13, 7890. [Google Scholar] [CrossRef]
- Smith, B.L. The difference between traditional experiments and CFD validation benchmark experiments. Nucl. Eng. Des. 2017, 312, 42–47. [Google Scholar] [CrossRef]
- Yu, J.; Liu, Z.; Wu, W. Research progress on dolphin skin drag reduction and noise reduction. In Proceedings of the 15th Symposium on Underwater Noise of Ships and the 30th Anniversary of the Establishment of the Underwater Noise Group of the Academic Committee of Ship Mechanics, Zhengzhou, China, 1 August 2015; p. 8. [Google Scholar]
- Xia, D.; Li, Z.; Lei, M.; Shi, Y.; Luo, X. Hydrodynamics of Butterfly-Mode Flapping Propulsion of Dolphin Pectoral Fins with Elliptical Trajectories. Biomimetics 2023, 8, 522. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.; Liu, S.-g.; Zhao, D.; Dong, L.-q.; Li, K.; Tang, S.; Cui, J.; Guo, H. Research on the flow stability and noise reduction characteristics of quasi-periodic elastic support skin. Def. Technol. 2024, 33, 222–236. [Google Scholar] [CrossRef]
- Shi, S.; Huang, X.; Rao, Z.; Su, Z.; Hua, H. Numerical analysis on flow noise and structure-borne noise of fully appended SUBOFF propelled by a pump-jet. Eng. Anal. Bound. Elem. 2022, 138, 140–158. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NACA Airfoil Model | Residual Sum of Squares 1 (SSE1) | Residual Sum of Squares 2 (SSE2) |
|---|---|---|
| 2415 | 0.035 074 329 | 0.041 801 820 |
| 2418 | 0.022 146 282 | 0.028 718 003 |
| 2421 | 0.016 872 901 | 0.023 161 129 |
| 0015 | 0.005 232 818 | / |
| 0018 | 0.002 486 536 | / |
| 0021 | 0.007 267 699 | / |
| Angle of Pitch/° | Speed/kn | Pressure Contact Drag Coefficient/Cp | Frictional Resistance Coefficient/Cf | Total Resistance Coefficient/Ct | Angle of Pitch/° | Speed/kn | Pressure Contact Drag Coefficient/Cp | Frictional Resistance Coefficient/Cf | Total Resistance Coefficient/Ct |
|---|---|---|---|---|---|---|---|---|---|
| 5° | 0.5 | 0.001 765 | 0.005 138 | 0.006 903 | −5° | 0.5 | 0.001 824 | 0.005 168 | 0.006 992 |
| 1 | 0.001 585 | 0.004 538 | 0.006 123 | 1 | 0.001 646 | 0.004 567 | 0.006 213 | ||
| 3 | 0.001 378 | 0.003 758 | 0.005 136 | 3 | 0.001 430 | 0.003 791 | 0.005 221 | ||
| 5 | 0.001 310 | 0.003 456 | 0.004 766 | 5 | 0.001 356 | 0.003 489 | 0.004 845 | ||
| 10° | 0.5 | 0.002 941 | 0.005 415 | 0.008 356 | −10° | 0.5 | 0.002 979 | 0.005 442 | 0.008 421 |
| 1 | 0.002 576 | 0.004 760 | 0.007 336 | 1 | 0.002 618 | 0.004 797 | 0.007 415 | ||
| 3 | 0.002 117 | 0.003 907 | 0.006 024 | 3 | 0.002 153 | 0.003 956 | 0.006 109 | ||
| 5 | 0.001 966 | 0.003 580 | 0.005 546 | 5 | 0.001 994 | 0.003 629 | 0.005 623 | ||
| 15° | 0.5 | 0.005 703 | 0.005 786 | 0.011 489 | −15° | 0.5 | 0.005 347 | 0.005 767 | 0.011 114 |
| 1 | 0.004 876 | 0.005 046 | 0.009 922 | 1 | 0.004 579 | 0.005 052 | 0.009 631 | ||
| 3 | 0.003 837 | 0.004 101 | 0.007 938 | 3 | 0.003 568 | 0.004 125 | 0.007 693 | ||
| 5 | 0.003 495 | 0.003 744 | 0.007 239 | 5 | 0.003 231 | 0.003 772 | 0.007 003 |
| Angle of Pitch/° | Speed/kn | Pressure Contact Drag Coefficient/Cp | Frictional Resistance Coefficient/Cf | Total Resistance Coefficient/Ct | Angle of Pitch/° | Speed/kn | Pressure Contact Drag Coefficient/Cp | Frictional Resistance Coefficient/Cf | Total Resistance Coefficient/Ct |
|---|---|---|---|---|---|---|---|---|---|
| 5° | 0.5 | 0.002 531 | 0.004 795 | 0.007 326 | −5° | 0.5 | 0.002 494 | 0.004 804 | 0.007 298 |
| 1 | 0.002 199 | 0.004 259 | 0.006 458 | 1 | 0.002 177 | 0.004 270 | 0.006 447 | ||
| 3 | 0.001 978 | 0.003 549 | 0.005 527 | 3 | 0.001 935 | 0.003 563 | 0.005 498 | ||
| 5 | 0.001 936 | 0.003 267 | 0.005 203 | 5 | 0.001 890 | 0.003 281 | 0.005 171 | ||
| 10° | 0.5 | 0.003 991 | 0.005 401 | 0.009 392 | −10° | 0.5 | 0.003 948 | 0.005 401 | 0.009 349 |
| 1 | 0.003 508 | 0.004 746 | 0.008 254 | 1 | 0.003 603 | 0.004 743 | 0.008 346 | ||
| 3 | 0.003 092 | 0.003 879 | 0.006 971 | 3 | 0.003 054 | 0.003 878 | 0.006 932 | ||
| 5 | 0.002 910 | 0.003 546 | 0.006 456 | 5 | 0.002 886 | 0.003 543 | 0.006 429 | ||
| 15° | 0.5 | 0.007 104 | 0.006 091 | 0.013 195 | −15° | 0.5 | 0.007 069 | 0.006 085 | 0.013 154 |
| 1 | 0.006 334 | 0.005 283 | 0.011 617 | 1 | 0.006 235 | 0.005 279 | 0.011 514 | ||
| 3 | 0.005 286 | 0.004 243 | 0.009 529 | 3 | 0.005 426 | 0.004 243 | 0.009 669 | ||
| 5 | 0.005 078 | 0.003 852 | 0.008 930 | 5 | 0.005 227 | 0.003 854 | 0.009 081 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, X.; Han, D.; Zhang, Y.; Chen, X.; Liu, B.; Kong, X.; Jiang, S. Numerical Simulation of Bionic Underwater Vehicle Morphology Drag Optimisation and Flow Field Noise Analysis. J. Mar. Sci. Eng. 2024, 12, 1373. https://doi.org/10.3390/jmse12081373
Huang X, Han D, Zhang Y, Chen X, Liu B, Kong X, Jiang S. Numerical Simulation of Bionic Underwater Vehicle Morphology Drag Optimisation and Flow Field Noise Analysis. Journal of Marine Science and Engineering. 2024; 12(8):1373. https://doi.org/10.3390/jmse12081373
Chicago/Turabian StyleHuang, Xiaoshuang, Dongxing Han, Ying Zhang, Xinjun Chen, Bilin Liu, Xianghong Kong, and Shuxia Jiang. 2024. "Numerical Simulation of Bionic Underwater Vehicle Morphology Drag Optimisation and Flow Field Noise Analysis" Journal of Marine Science and Engineering 12, no. 8: 1373. https://doi.org/10.3390/jmse12081373
APA StyleHuang, X., Han, D., Zhang, Y., Chen, X., Liu, B., Kong, X., & Jiang, S. (2024). Numerical Simulation of Bionic Underwater Vehicle Morphology Drag Optimisation and Flow Field Noise Analysis. Journal of Marine Science and Engineering, 12(8), 1373. https://doi.org/10.3390/jmse12081373