
Study on the Turning Characteristics and Influencing Factors of the Unmanned Sailboat


Abstract
:1. Introduction
- A motion simulation platform is built for the unmanned sailboat, which is used to investigate the turning characteristics under the two conditions of ideal static water and flow interference and obtain the turning law of the sailboat;
- The index of the approximate turning circle is proposed based on the turning trajectory, which provides a new quantitative tool for analyzing the turning performances of unmanned sailboats;
- A harbor pool test is carried out based on the 3 m class Petrel Sail unmanned sailboat to verify the correctness of the simulation results.
2. Petrel Sail Unmanned Sailboat
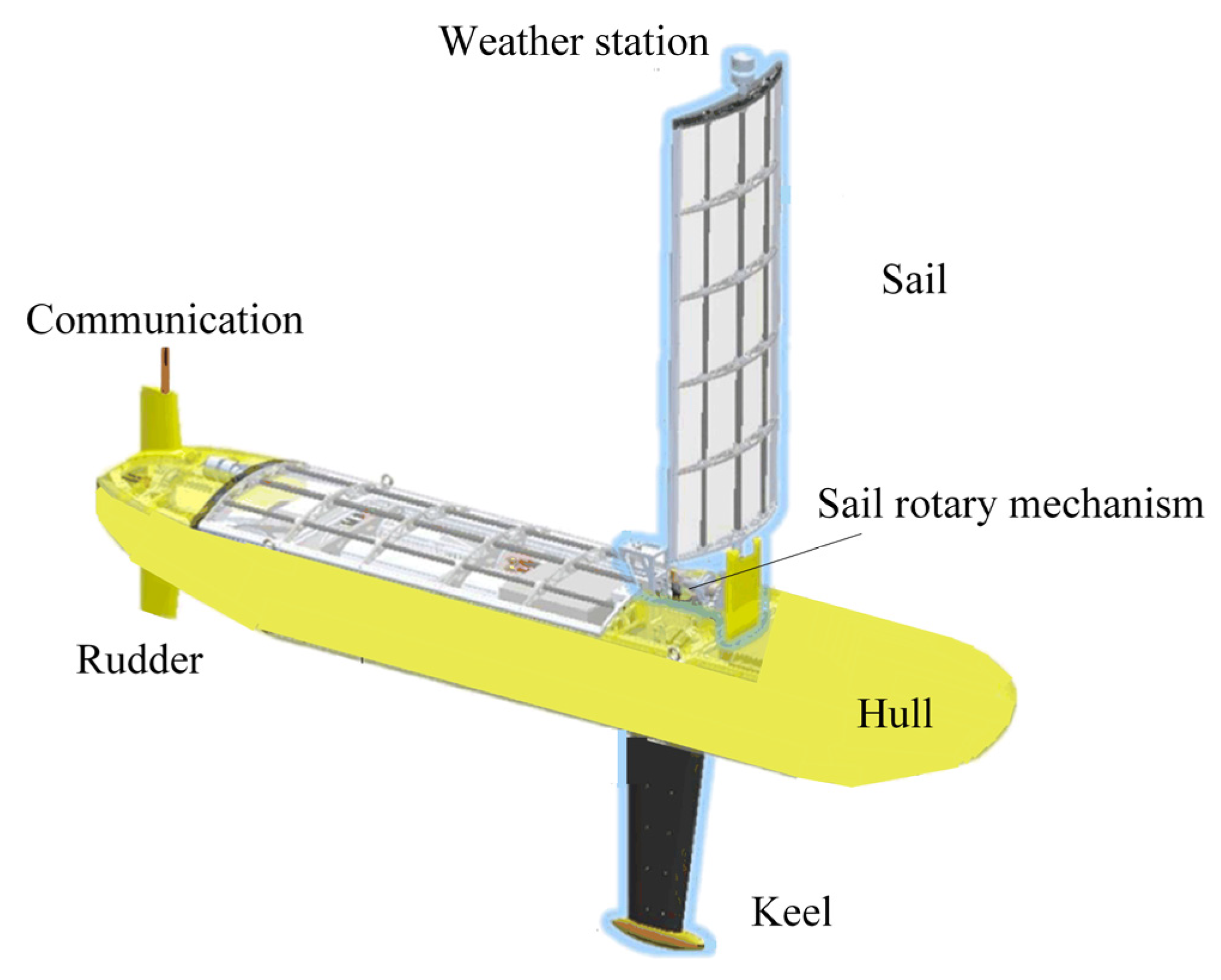
2.1. Configuration of Petrel Sail
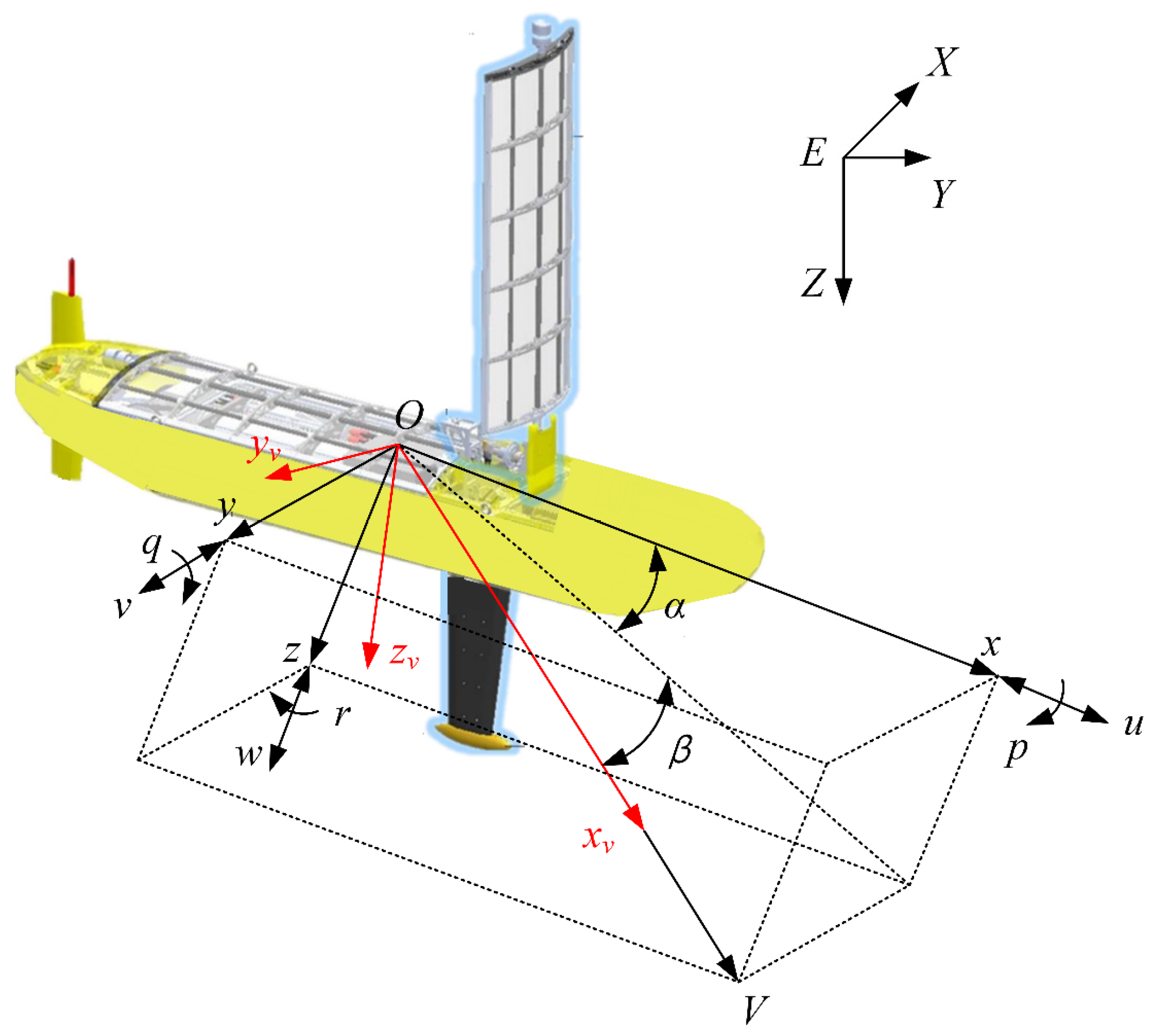
2.2. Dynamic Model
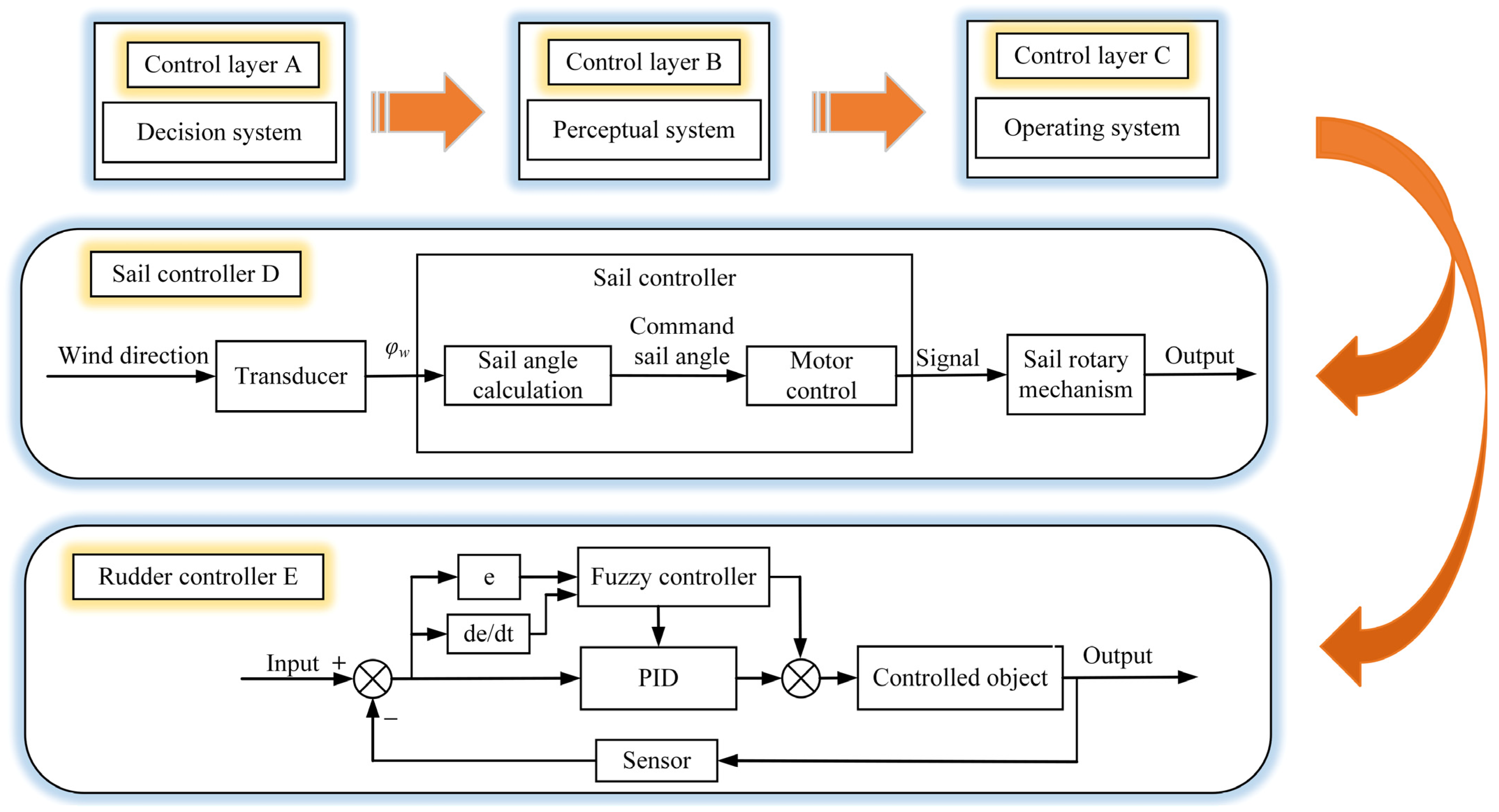
2.3. Control Architecture
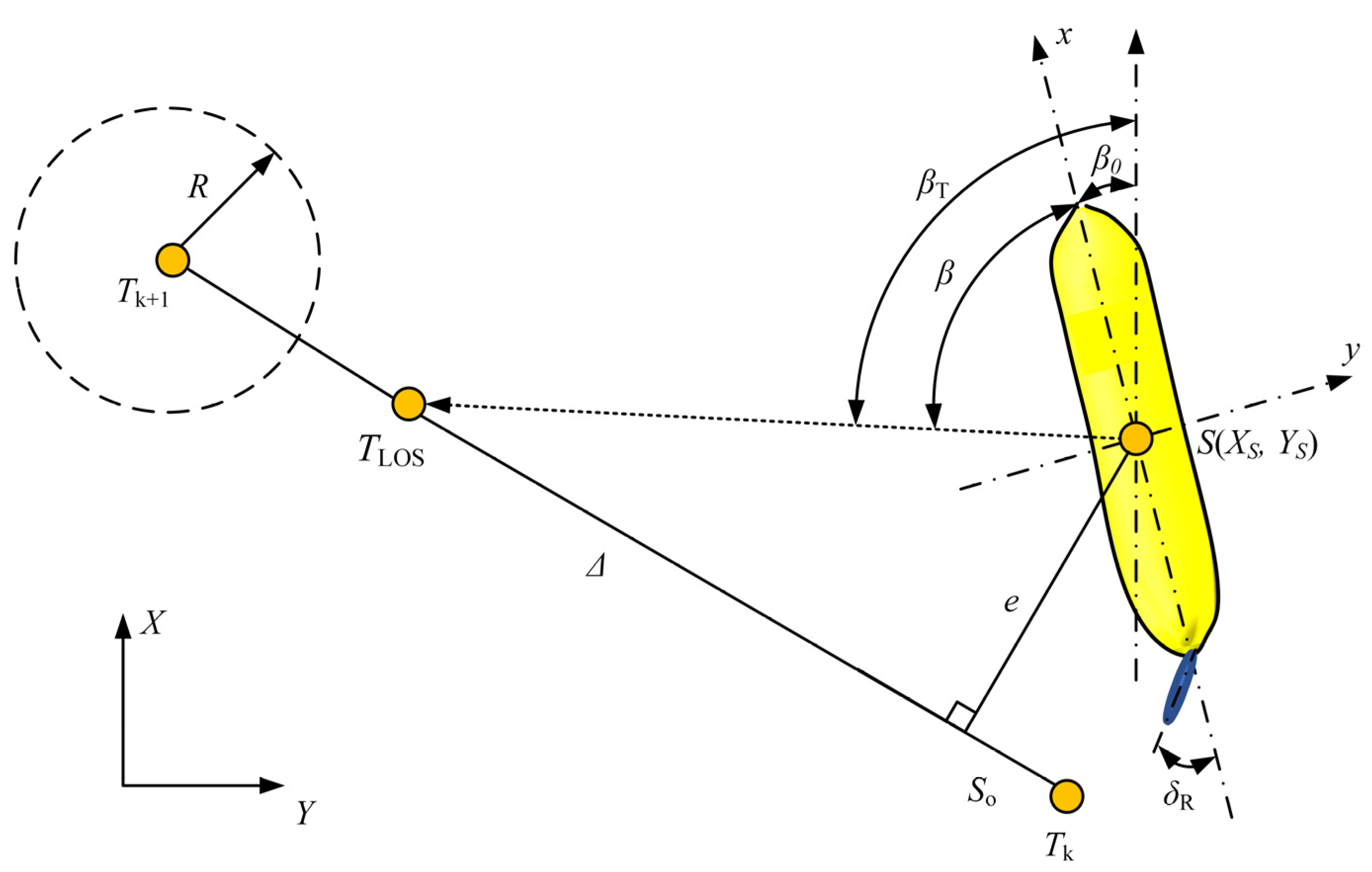
2.4. Path-Following Strategy
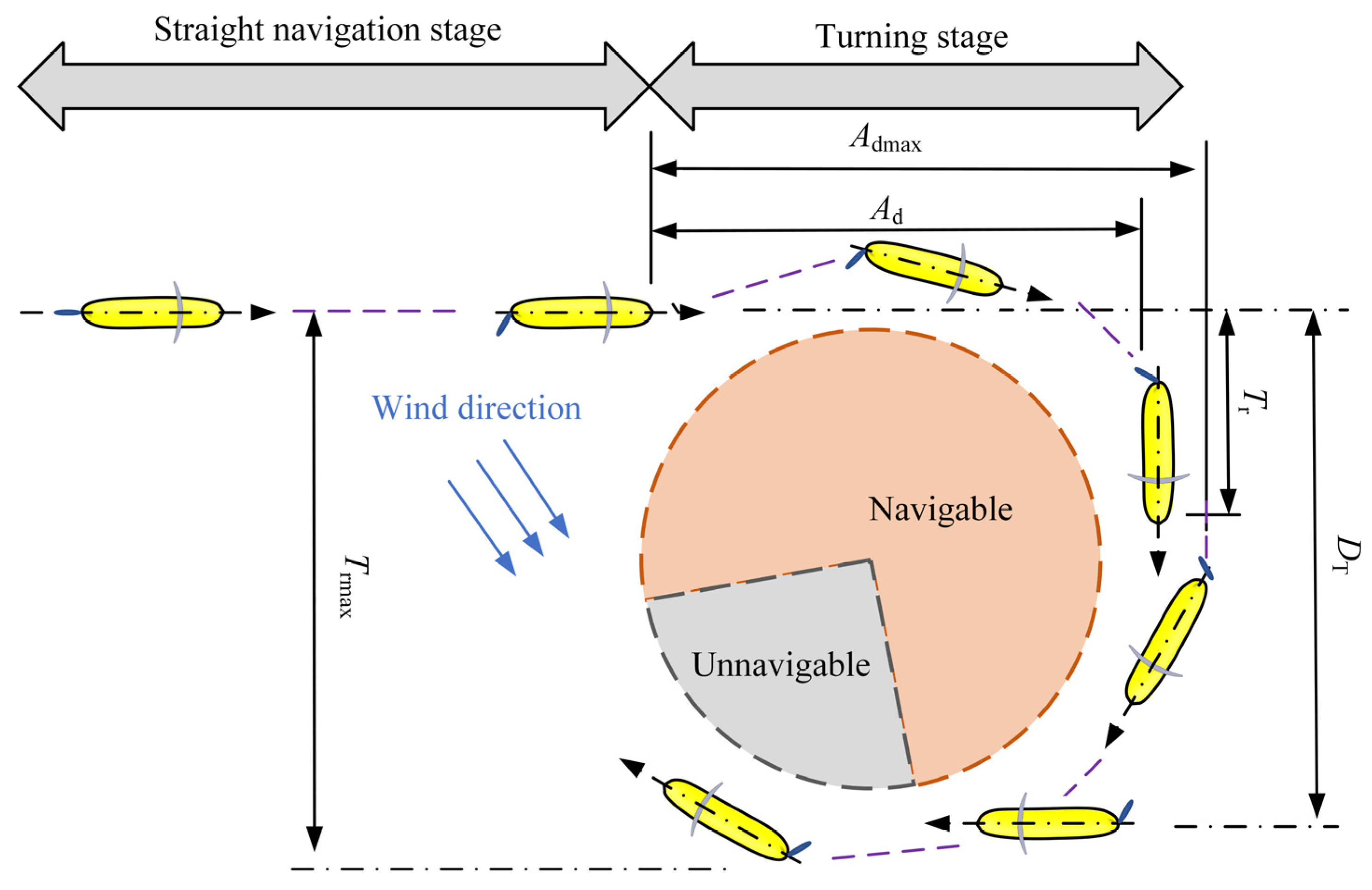
3. Turning Motion
4. Simulation Analysis
4.1. Turning Characteristics under Ideal Hydrostatic Conditions
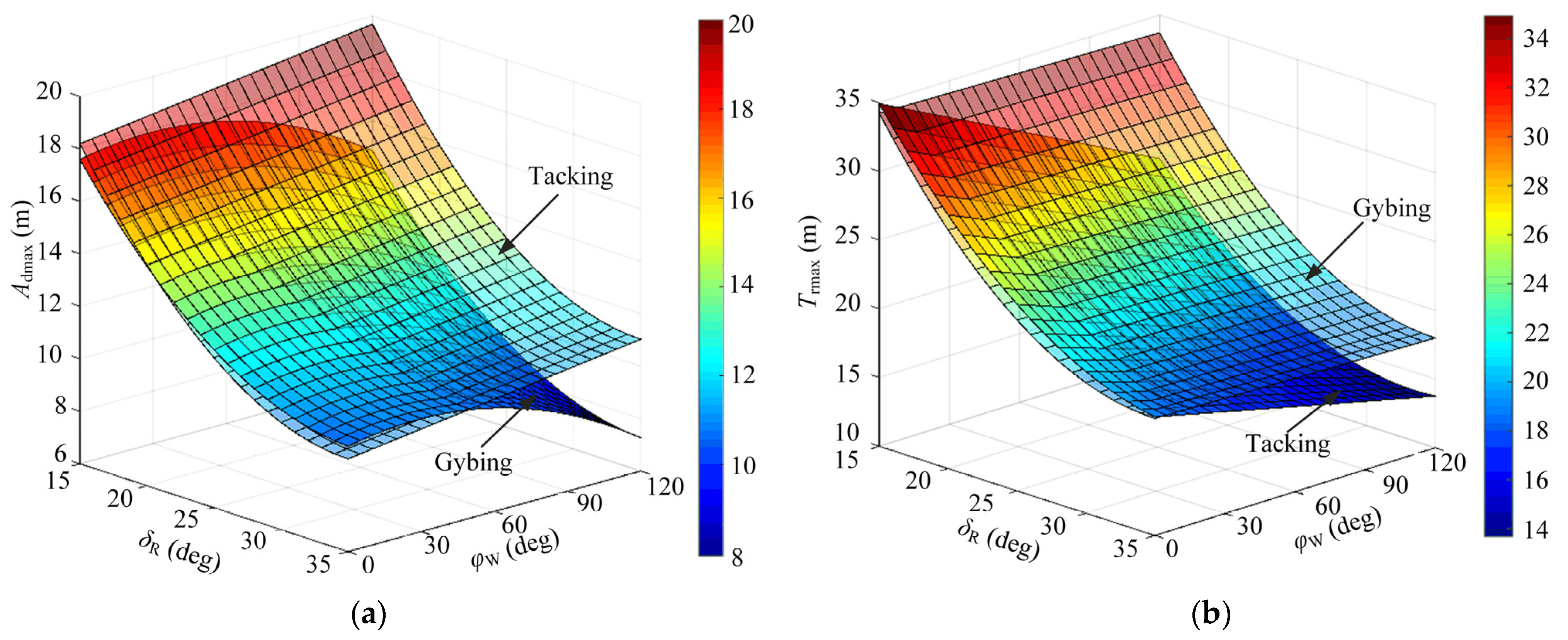
- The maximum rudder value that could be realized by the unmanned sailboat in practical work was set to 35°, and the minimum value was set to 5°, since a smaller rudder angle cannot produce enough torque to complete the turning motion. Therefore, the ranges of the rudder angle were set to −15° to −35° and 15° to 35°.
- The unmanned sailboat works on the sea surface in all weather conditions. The wind situation in the South China Sea region was taken as the reference for the current study, and it is affected by monsoon all year round. The wind is distributed in the range from level 3 to level 5 more than 90% of the time. In this case, the range of wind speed vw was set from 4 m/s to 8 m/s.
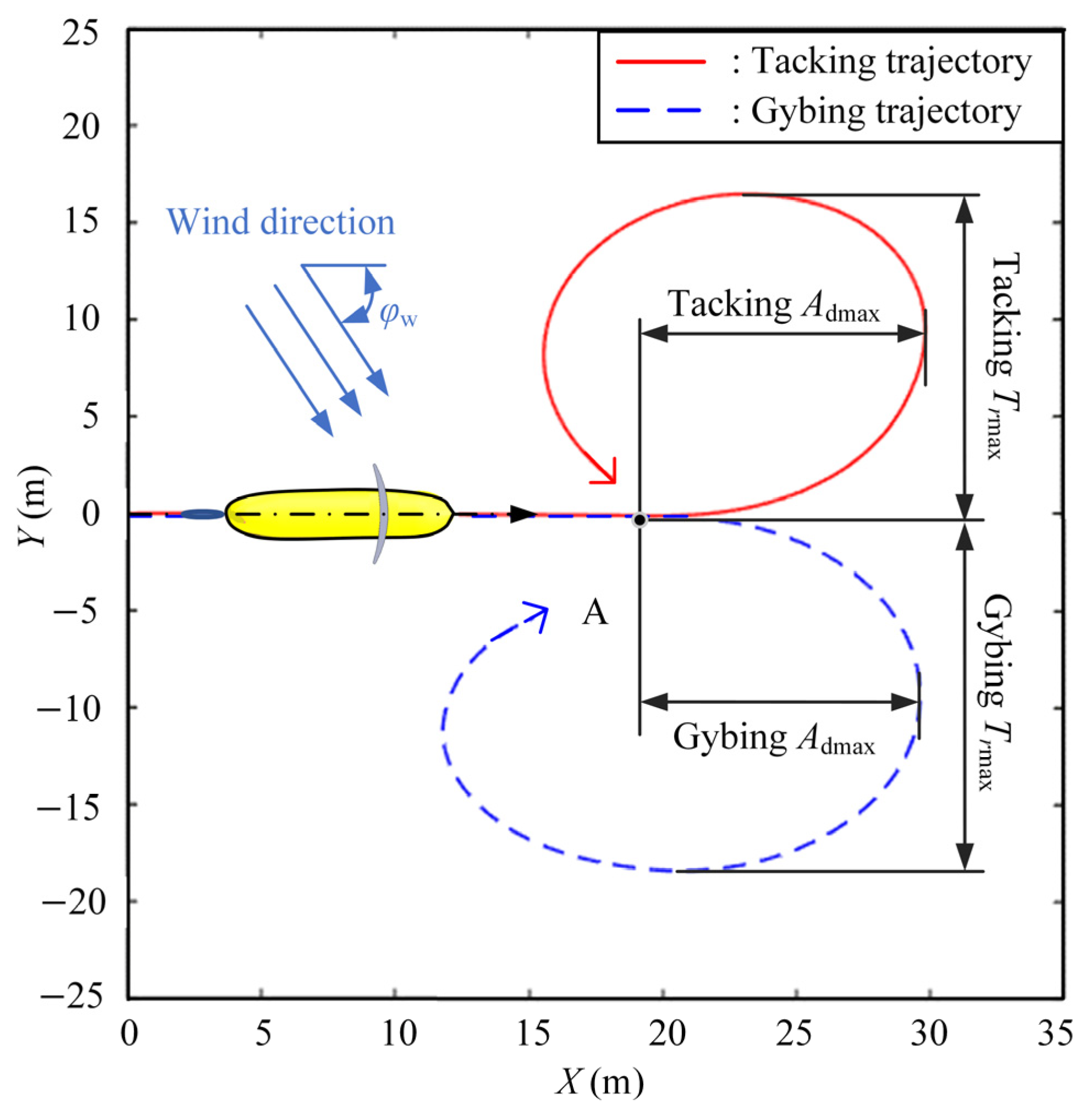
- The wind angle was set to be less than 120°, thus ensuring the utilization of wind power in both tacking and gybing. If the wind angle was greater than 120° during tacking, the unmanned sailboat would enter the non-navigable area, which makes it difficult to effectively utilize the wind power. Therefore, the wind angle φw was set from −120° to 120°.
4.2. Turning Characteristics under Flow Disturbance Conditions
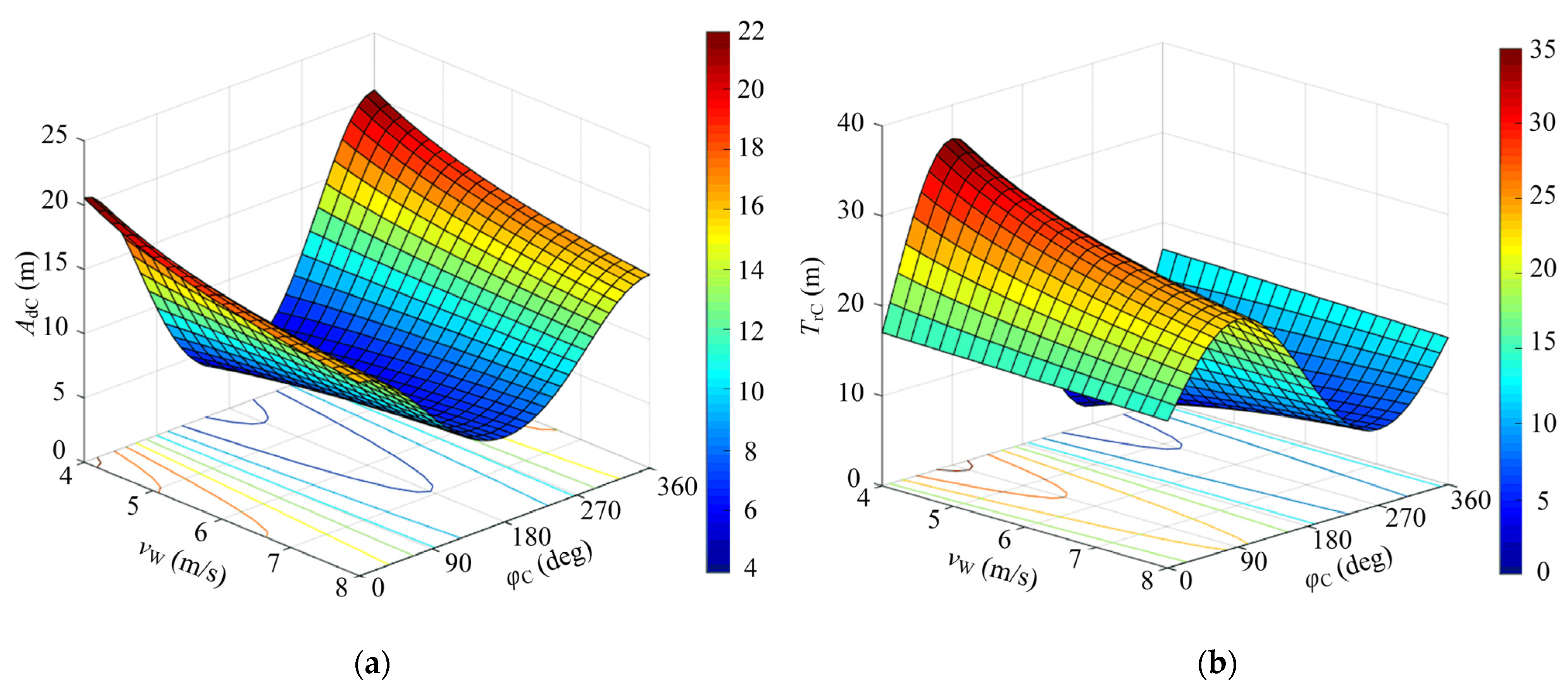
4.3. Effect of Flow Velocity under Flow Disturbance
4.4. Effect of Wind Speed under Flow Interference
5. Harbor Pool Test
5.1. Test Conditions
5.2. Test Results
6. Discussion
7. Conclusions
- (1)
- In the hydrostatic condition, the maximum advance distance Admax and transverse distance Trmax are mainly affected by the rudder angle and wind angle, but not significantly affected by the wind speed. Better maneuverability of the unmanned sailboat can be obtained by selecting tacking.
- (2)
- Under flow disturbance, the maximum advance distance changes significantly when the unmanned sailboat is subjected to different flow situations (countercurrent or concurrent current). The maximum transverse distance varies significantly when sailboats are subjected to transverse currents, and the changing trend depends on the relationship between the turning direction and the flow direction. The increase in flow velocity will enhance the influence of flow interference on the maximum advance distance Admax and transverse distance Trmax, while the opposite is true for wind speed.
- (3)
- The index of the approximate turning circle is a key metric that quantifies the maneuverability of a sailboat during its turning motion. This index is defined as the supposed circular path formed by the sailboat’s trajectory during turning maneuvers.
- (4)
- The error between the test results and simulation results for the maximum advance distance is within the range 2.7% to 14.8%, and that for the maximum transverse distance is within the range 6.2% to 13.8%. The errors are in a reasonable range, verifying the correctness of the simulation model established.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| a | A constant term for regression orthogonal test |
| Ad | The longitudinal distance traveled from the initiation of steering to the 90° change in course |
| AdC | Maximum advance distance for turning motion under current disturbance |
| AdDowm | Maximum advance distance travelled in gybing |
| Admax | Maximum longitudinal distance reached by the unmanned sailboat after a 90° change in course. |
| Adup | Maximum distance travelled in tacking |
| b1 | A linear regression coefficient of regression orthogonal test |
| b2 | A linear regression coefficient of regression orthogonal test |
| b3 | A linear regression coefficient of regression orthogonal test |
| b12 | An interaction term partial regression coefficient of regression orthogonal test |
| b13 | An interaction term partial regression coefficient of regression orthogonal test |
| b23 | An interaction term partial regression coefficient of regression orthogonal test |
| b11 | A quadratic term partial regression coefficient of regression orthogonal test |
| b22 | A quadratic term partial regression coefficient of regression orthogonal test |
| b33 | A quadratic term partial regression coefficient of regression orthogonal test |
| DT | The lateral distance traveled when the initial heading changes by 180° |
| Fx | Force on the unmanned sailboat in x-direction |
| Fy | Force on the unmanned sailboat in y-direction |
| Fz | Force on the unmanned sailboat in z-direction |
| IBxy | The moment of inertia of the unmanned sailboat’s mass in the xOy plane of the body coordinate system |
| IByz | The moment of inertia of the unmanned sailboat’s mass in the yOz plane of the body coordinate system |
| IBzx | The moment of inertia of the unmanned sailboat’s mass in the xOz plane of the body coordinate system |
| KC | Centroid angle coefficient of the approximate turning circle |
| Kp | Scaling factor |
| Ki | Integral coefficient |
| Kd | Differential coefficient |
| m | Mass of unmanned sailboat |
| Mx | Moment of the unmanned sailboat in x-direction |
| My | Moment of the unmanned sailboat in y-direction |
| Mz | Moment of the unmanned sailboat in z-direction |
| p | Angular velocity of the unmanned sailboat in x-direction |
| q | Angular velocity of the unmanned sailboat in y-direction |
| r | Angular velocity of the unmanned sailboat in z-direction |
| rS | Radius of the approximate turning circle |
| t | Time |
| Tr | The lateral distance traveled from the initiation of steering to the 90° change in course |
| TrC | Maximum transfer distance under flow interference |
| TrDown | Maximum transfer distance for gybing |
| Trup | Maximum transfer distance for tacking |
| irmax | The maximum lateral distance traveled during the turning motion |
| TS | The working time of the sail rotary mechanism |
| u | Velocity of the unmanned sailboat in x-direction |
| v | Velocity of the unmanned sailboat in y-direction |
| vw | Wind speed |
| w | Velocity of the unmanned sailboat in z-direction |
| x | x-direction in the coordinate system of the sailboat |
| xS | x-coordinate of the center of the approximate turning circle |
| xv | x-direction in the velocity coordinate system |
| X | x-direction in the geocentric coordinate system |
| y | y-direction in the body coordinate system |
| yS | y-coordinate of the center of the approximate turning circle |
| yv | y-direction in the velocity coordinate system |
| Y | y-direction in the geocentric coordinate system |
| z | z-direction in the body coordinate system |
| zj′ | Coding after centering of the regression orthogonal test |
| zv | z-direction in the velocity coordinate system |
| Z | z-direction in the geocentric coordinate system |
| β | Actual heading deviation angle |
| βC | Variation rate of deviation angle |
| βT | LOS angle of the unmanned sailboat |
| β(t) | Heading deviation collected at time t |
| γ | Turning angle parameter |
| γS | The center angle |
| θ | Sail rotation angle |
| θe | Target turning angle |
| δR | Rudder angle of the unmanned sailboat |
| φw | Wind angle of the unmanned sailboat |
| ΨS | Angle of heading change |
Appendix A. Three-Factor Level Encoding for δR, vw, and φw
| Coded Value zj | Variable Factor Level | ||
| δR(deg) | vw(m/s) | φw(deg) | |
| Upper limit r = 1.215(x2j) | 35 | 8 | 120 |
| Upper-level 1 (x0j + Δj) | 33.231 | 7.646 | 109.383 |
| Zero level 0 (x0j) | 25 | 6 | 60 |
| Lower-level −1 (x0j − Δj) | 16.769 | 4.354 | 10.617 |
| Floor −r = −1.215 (x2j) | 15 | 4 | 0 |
| Variation interval Δj = (x2j − x1j)/2r | 8.231 | 1.646 | 49.383 |
Appendix B. Combination Schemes Designed for the Orthogonal Test
| Number | Constant z0 | Primary Term | Interaction Term | Quadratic Term | ||||||
| z1 | z2 | z3 | z1z2 | z1z3 | z2z3 | z1′ | z2′ | z3′ | ||
| 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0.27 | 0.27 | 0.27 |
| 2 | 1 | 1 | 1 | −1 | 1 | −1 | −1 | 0.27 | 0.27 | 0.27 |
| 3 | 1 | 1 | −1 | 1 | −1 | 1 | −1 | 0.27 | 0.27 | 0.27 |
| 4 | 1 | 1 | −1 | −1 | −1 | −1 | 1 | 0.27 | 0.27 | 0.27 |
| 5 | 1 | −1 | 1 | 1 | −1 | −1 | 1 | 0.27 | 0.27 | 0.27 |
| 6 | 1 | −1 | 1 | −1 | −1 | 1 | −1 | 0.27 | 0.27 | 0.27 |
| 7 | 1 | −1 | −1 | 1 | 1 | −1 | −1 | 0.27 | 0.27 | 0.27 |
| 8 | 1 | −1 | −1 | −1 | 1 | 1 | 1 | 0.27 | 0.27 | 0.27 |
| 9 | 1 | r | 0 | 0 | 0 | 0 | 0 | 0.747 | −0.73 | −0.73 |
| 10 | 1 | −r | 0 | 0 | 0 | 0 | 0 | 0.747 | −0.73 | −0.73 |
| 11 | 1 | 0 | r | 0 | 0 | 0 | 0 | −0.73 | 0.747 | −0.73 |
| 12 | 1 | 0 | −r | 0 | 0 | 0 | 0 | −0.73 | 0.747 | −0.73 |
| 13 | 1 | 0 | 0 | r | 0 | 0 | 0 | −0.73 | −0.73 | 0.747 |
| 14 | 1 | 0 | 0 | −r | 0 | 0 | 0 | −0.73 | −0.73 | 0.747 |
| 15 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | −0.73 | −0.73 | −0.73 |
Appendix C. Results for Approximate Circle Parameters in the Orthogonal Test
| Number | Center of Circle xs (m) | Center of Circle ys (m) | Radius rs (m) | Center Angle Coefficient Ks | ||||
| Tacking | Gybing | Tacking | Gybing | Tacking | Gybing | Tacking | Gybing | |
| 1 | 23.24 | 18.8 | 5.3 | −9.5 | 8.02 | 9.41 | 3.98 | −4.71 |
| 2 | 22.7 | 22.29 | 11.17 | −11.05 | 7.61 | 8.08 | 4.13 | −4.17 |
| 3 | 22.23 | 14.55 | 6.06 | −4.94 | 8.56 | 14.78 | 2.33 | −2.76 |
| 4 | 22.23 | 21.89 | 10.7 | −10.87 | 7.93 | 8.33 | 2.4 | −2.45 |
| 5 | 25.37 | 17.45 | 8.45 | −15.26 | 13.7 | 15.85 | 2.98 | −3.6 |
| 6 | 25.36 | 24.23 | 19.77 | −19.31 | 11.8 | 13.1 | 3.23 | −3.2 |
| 7 | 23.87 | 18.15 | 9.69 | −15.46 | 14.25 | 15.95 | 1.83 | −2.16 |
| 8 | 24.22 | 23.3 | 18.74 | −18.64 | 12.82 | 13.62 | 1.91 | −1.93 |
| 9 | 22.65 | 20.61 | 9.27 | −9.41 | 7.25 | 8.99 | 3.21 | −3.47 |
| 10 | 26.05 | 20.82 | 17.52 | −17.62 | 13.18 | 17.38 | 2.34 | −2.47 |
| 11 | 23.67 | 20.95 | 11.28 | −11.55 | 8.65 | 11.05 | 4.11 | −4.34 |
| 12 | 23 | 20.71 | 11 | −11.61 | 9.32 | 11.09 | 2.12 | −2.27 |
| 13 | 23.04 | 18.19 | 6.06 | −11.29 | 10.28 | 11.31 | 2.92 | −3.56 |
| 14 | 22.89 | 22.86 | 13.3 | −13.51 | 9.5 | 9.48 | 3.05 | −3.05 |
| 15 | 23.39 | 20.66 | 11.2 | −11.36 | 8.94 | 11.24 | 3.1 | −3.28 |
Appendix D. Analysis of the Regression Results
| Evaluation Index | Difference Source | Sum of Squares | Degree of Freedom | Mean Square | F | Significance | R2 |
| Tacking center xs | Regression | 18.728 | 4 | 4.682 | 59.493 | ** | 0.944 |
| Residual | 0.787 | 10 | 0.079 | ||||
| Sum | 19.515 | 14 | |||||
| Gybing center xs | Regression | 73.779 | 1 | 73.779 | 55.732 | ** | 0.811 |
| Residual | 17.210 | 13 | 1.324 | ||||
| Sum | 90.989 | 14 | |||||
| Tacking center ys | Regression | 271.781 | 5 | 54.356 | 117.531 | ** | 0.977 |
| Residual | 4.162 | 9 | 0.462 | ||||
| Sum | 275.943 | 14 | |||||
| Gybing center ys | Regression | 190.852 | 2 | 95.426 | 55.49 | ** | 0.902 |
| Residual | 20.666 | 12 | 1.722 | ||||
| Sum | 211.519 | 14 | |||||
| Tacking radius rs | Regression | 79.779 | 6 | 13.297 | 344.118 | ** | 0.993 |
| Residual | 0.309 | 8 | 0.039 | ||||
| Sum | 80.088 | 14 | |||||
| Gybing radius rs | Regression | 103.774 | 3 | 34.591 | 18.196 | ** | 0.832 |
| Residual | 20.912 | 11 | 1.901 | ||||
| Sum | 124.67 | 14 | |||||
| Tacking coefficient Ks | Regression | 7.911 | 5 | 1.598 | 304.532 | ** | 0.991 |
| Residual | 0.047 | 9 | 0.005 | ||||
| Sum | 8.038 | 14 | |||||
| Gybing coefficient Ks | Regression | 9.717 | 6 | 1.620 | 628.489 | ** | 0.996 |
| Residual | 0.021 | 8 | 0.003 | ||||
| Sum | 9.738 | 14 |
References
- Wu, L.; Chen, Z.; Lin, X.; Liu, Y. Building the integrated observational network of “Transparent Ocean”. Chin. Sci. Bull. 2020, 65, 2654–2661. [Google Scholar] [CrossRef]
- Shu, Y.; Xiu, P.; Xue, H.; Yao, J.; Yu, J. Glider-observed anticyclonic eddy in northern South China Sea. Aquat. Ecosyst. Health Manag. 2016, 19, 233–241. [Google Scholar] [CrossRef]
- Chai, F.; Johnson, K.S.; Claustre, H.; Xing, X.; Wang, Y.; Boss, E.; Riser, S.; Fennel, K.; Schofield, O.; Sutton, A. Monitoring Ocean biogeochemistry with autonomous platforms. Nat. Rev. Earth Environ. 2020, 1, 315–326. [Google Scholar] [CrossRef]
- AMS. Available online: https://www.automarinesys.com/ (accessed on 15 April 2022).
- Dominguez-Brito, A.; Valle-Fernandez, B.; Cabrera-Gamez, J.; Ramos-de-Miguel, A.; García, J.C. A-TIRMA G2: An oceanic autonomous sailboat. In Robotic Sailing 2015; Springer: Cham, Switzerland, 2016; pp. 3–13. [Google Scholar]
- Offshore Sensing AS. Transatlantic Crossing 2018. Available online: http://www.sailbuoy.no/news-2/64-transatlantic-crossing (accessed on 22 March 2022).
- Saildrone Inc. The New Gold Standard for Autonomous Systems: Saildrone Voyager Is First USV to Earn Formal Classification; Saildrone Inc.: Alameda, CA, USA, 2023. [Google Scholar]
- Meng, X.; Yang, Y.; Yin, S.; Wang, X. Unmanned sailboat with self-balancing rotating sail based on elastic rope: Modeling, optimization, and sea trials. Appl. Energy 2024, 363, 123045. [Google Scholar] [CrossRef]
- Yin, S.; Yang, Y.; Liu, B.; Meng, X. Experimental study on propulsion performance of unmanned sailboat with arc sail. Ocean Eng. 2023, 282, 115029. [Google Scholar] [CrossRef]
- Kuang, L.; Li, H.; Su, X.; Song, X.; Wang, Z.; Zhang, Y.; Ma, W. Effect of chord length ratio on aerodynamic performance of two-element wing sail. Ocean Eng. 2023, 287, 115946. [Google Scholar] [CrossRef]
- Liu, R.; Huang, C.; An, Y.; Liu, X.; Lin, Y. Research on sail Angle of Attack with Minimum Turning Diameter. Comput. Appl. Softw. 2022, 39, 76–81. [Google Scholar]
- Saoud, H.; Hua, M.D.; Plumet, F.; Amar, F.B. Optimal sail angle computation for an autonomous sailboat robot. In Proceedings of the 2015 54th IEEE Conference on Decision and Control (CDC), Osaka, Japan, 15–18 December 2015; pp. 807–813. [Google Scholar]
- Augenstein, T.; Singh, A.; Miller, J.; Pomerenk, A.; Dean, A.; Ruina, A. Using a controlled sail and tail to steer an autonomous sailboat. In Robotic Sailing 2016: Proceedings of the 9th International Robotic Sailing Conference; Springer International Publishing: Cham, Switzerland, 2017; pp. 91–103. [Google Scholar]
- Zhang, Y.; Shen, Z.H. Controlled area of sailing under uniform wind condition. J. Dalian Marit. Univ. 2019, 45, 19–25. [Google Scholar]
- Giger, L.; Wismer, S.; Boehl, S.; Büsser, G.A.; Erckens, H.; Weber, J.; Moser, P.; Schwizer, P.; Pradalier, C.; Siegwart, R. Design and construction of the autonomous sailing vessel Avalon. In Proceedings of the World Robotic Sailing Championship and International Robotic Sailing Conference; Eidgenössische Technische Hochschule Zürich: Zurich, Switzerland, 2009. [Google Scholar]
- Jiang, F.; Li, Y.; Gong, J. Study on the manoeuvre characteristics of a trimaran under different layouts by water-jet self-propulsion model test. Appl. Ocean Res. 2021, 108, 102550. [Google Scholar] [CrossRef]
- Wang, X.; Zou, Z.; Zhang, W.; Zhang, W.; Chang, H. Research on maneuverability prediction for SWATH ships. Ship Sci. Technol. 2012, 34, 83–87, 105. [Google Scholar]
- Wang, C.; Tong, S.; Jiang, P.; Tang, X. Numerical Simulation of ship maneuvering motion under wind flow effect. J. Dalian Marit. Univ. 2020, 46, 50–59. [Google Scholar]
- Tavakoli, S.; Dashtimanesh, A. A six-DOF theoretical model for steady turning maneuver of a planning hull. Ocean Eng. 2019, 189, 106328. [Google Scholar] [CrossRef]
- Wu, G.; Zhao, M.; Cong, Y.; Hu, Z.; Li, G. Algorithm of Berthing and Maneuvering for Catamaran Unmanned Surface Vehicle Based on Ship Maneuverability. J. Mar. Sci. Eng. 2021, 9, 289. [Google Scholar] [CrossRef]
- Jeon, M.; Lee, D.; Yoon, H. Development of 6-DOF Equations of Motion for a Planning Boat Based on the Results of Sea Trial Tests. J. Navig. Port Res. 2016, 40, 231–239. [Google Scholar] [CrossRef]
- Wang, D.; Sun, M.; Liu, J.; Sun, C. Fixed-Time Predictor-Based Path Following Control of Unmanned Surface Vehicles. Control Theory Appl. 2022, 39, 1845–1853. [Google Scholar]
- Rabitz, H.; Aliş, Ö.F. General foundations of high-dimensional model representations. J. Math. Chem. 1999, 25, 197–233. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Configuration | Parameter | Value |
|---|---|---|
| Hull | Length (mm) | 3100 |
| Width (mm) | 650 | |
| Aspect ratio | 1.5 | |
| Draft (mm) | 250 | |
| Heel angle (deg) | 40 | |
| Sail | Height (mm) | 1400 |
| Width (mm) | 600 | |
| Area (m2) | 0.84 | |
| Weight (kg) | 8 | |
| Keel | Length (mm) | 750 |
| Width (mm) | 250 | |
| Area (m2) | 0.1875 | |
| Weight (kg) | 15 |
| Parameter | Definition |
|---|---|
| Advance Ad | The longitudinal distance traveled from the initiation of steering to the 90° change in course |
| Max. advance Admax | The maximum longitudinal distance traveled during the turning motion |
| Tactical diameter DT | The lateral distance traveled when the initial heading changes by 180° |
| Transfer Tr | The lateral distance traveled from the initiation of steering to the 90° change in course |
| Max. transfer Trmax | The maximum lateral distance traveled during the turning motion |
| No. | Admax (m) | Trmax (m) | No. | Admax (m) | Trmax (m) | ||||
|---|---|---|---|---|---|---|---|---|---|
| Tacking | Gybing | Tacking | Gybing | Tacking | Gybing | Tacking | Gybing | ||
| 1 | 11.1 | 8.2 | 13.3 | 18.9 | 9 | 9.9 | 9.6 | 16.5 | 18.4 |
| 2 | 10 | 10.2 | 18.7 | 19 | 10 | 9.2 | 8.2 | 30.6 | 35 |
| 3 | 10.7 | 8.6 | 14.6 | 18.9 | 11 | 12.3 | 12 | 19.9 | 22.7 |
| 4 | 10 | 10.1 | 18.6 | 19.1 | 12 | 12.3 | 11.8 | 20.3 | 22.7 |
| 5 | 18.7 | 13.3 | 22.1 | 31.1 | 13 | 13.2 | 9.5 | 16.3 | 22.6 |
| 6 | 16.4 | 16.7 | 31.4 | 32.1 | 14 | 12.1 | 12.1 | 22.9 | 22.9 |
| 7 | 17.9 | 14.1 | 23.9 | 31.4 | 15 | 12.3 | 11.9 | 20.1 | 22.6 |
| 8 | 16.6 | 16.6 | 31.5 | 32.1 | |||||
| Evaluation Index | Difference Source | Sum of Squares | Degree of Freedom | Mean Square | F | Significance | R2 |
|---|---|---|---|---|---|---|---|
| Tacking Admax | Regression | 152.983 | 3 | 50.994 | 414.118 | ** | 0.991 |
| Residual | 1.355 | 11 | 0.123 | ||||
| Sum | 154.337 | 14 | |||||
| Gybing Admax | Regression | 130.098 | 4 | 32.524 | 158.539 | ** | 0.984 |
| Residual | 2.052 | 10 | 0.205 | ||||
| Sum | 132.149 | 14 | |||||
| Tacking Trmax | Regression | 472.988 | 4 | 118.247 | 246.529 | ** | 0.990 |
| Residual | 4.796 | 10 | 0.480 | ||||
| Sum | 477.784 | 14 | |||||
| Gybing Trmax | Regression | 491.411 | 3 | 163.804 | 2089.084 | ** | 0.999 |
| Residual | 0.863 | 11 | 0.078 | ||||
| Sum | 492.273 | 14 |
| Number | Relative Wind Angle (deg) | Rudder Angle (deg) | Wind Speed (m/s) |
|---|---|---|---|
| Trial 1 | 180 | 20 | 3.9 |
| Trial 2 | 120 | 20 | 4.2 |
| Trial 3 | 150 | 30 | 4.5 |
| Trial 4 | 90 | 30 | 4.1 |
| Number | Boat Speed (m/s) | Admax (m) | Deviation (%) | Trmax (m) | Deviation (%) |
|---|---|---|---|---|---|
| Trial 1 | 1.0 | 12.5 | 14.8 | 24.1 | 13.5 |
| Trial 2 | 1.0 | 12.8 | 10.4 | 25.3 | 6.6 |
| Trial 3 | 1.0 | 11.2 | 7.1 | 19.9 | 6.2 |
| Trial 4 | 1.0 | 11.5 | 2.7 | 17.2 | 10.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Yang, Y.; Yin, S. Study on the Turning Characteristics and Influencing Factors of the Unmanned Sailboat. J. Mar. Sci. Eng. 2024, 12, 1374. https://doi.org/10.3390/jmse12081374
Liu H, Yang Y, Yin S. Study on the Turning Characteristics and Influencing Factors of the Unmanned Sailboat. Journal of Marine Science and Engineering. 2024; 12(8):1374. https://doi.org/10.3390/jmse12081374
Chicago/Turabian StyleLiu, Hongyu, Yanan Yang, and Songwei Yin. 2024. "Study on the Turning Characteristics and Influencing Factors of the Unmanned Sailboat" Journal of Marine Science and Engineering 12, no. 8: 1374. https://doi.org/10.3390/jmse12081374