
Numerical Simulation of a Floating Offshore Wind Turbine in Wind and Waves Based on a Coupled CFD–FEA Approach


Abstract
1. Introduction
2. Numerical Method
2.1. Computational Fluid Dynamics Solver
2.2. Explicit Dynamic Finite Element Method (FEM)
2.3. CFD-FEA Coupling Approach
3. Numerical Modeling
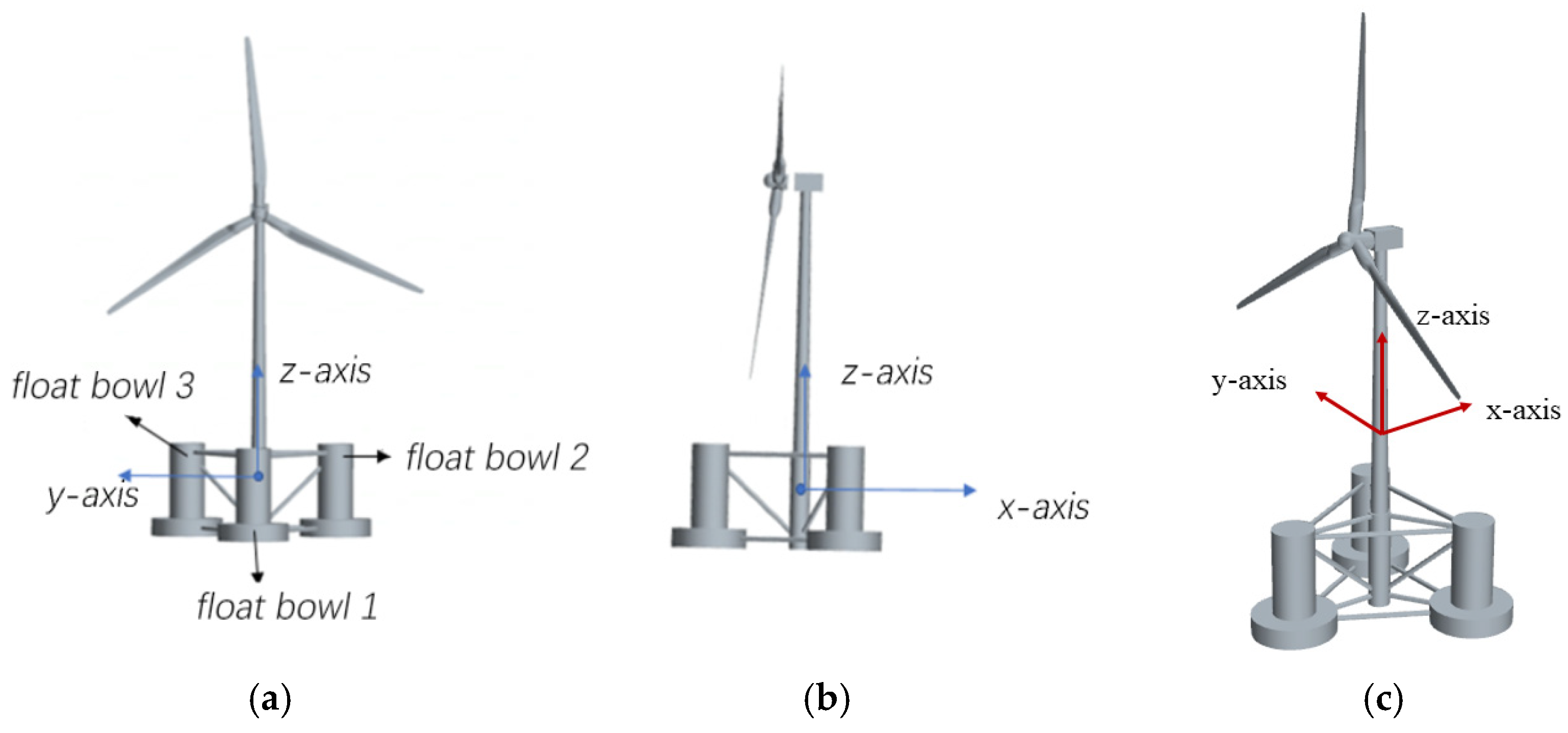
3.1. NREL 5MW FOWT
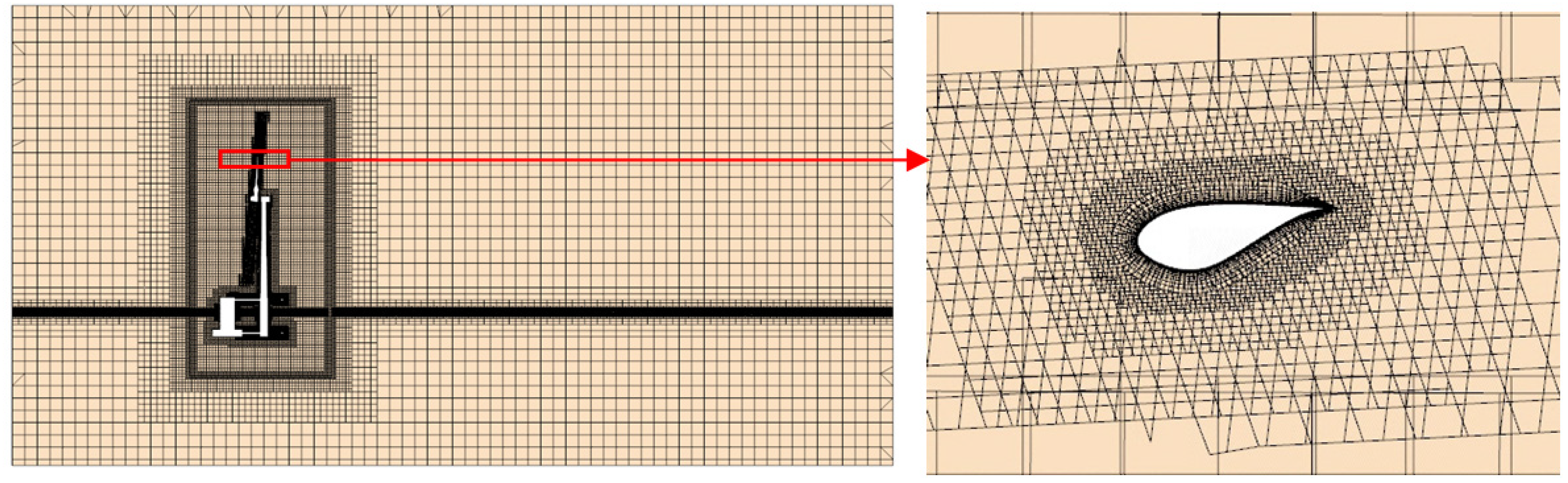
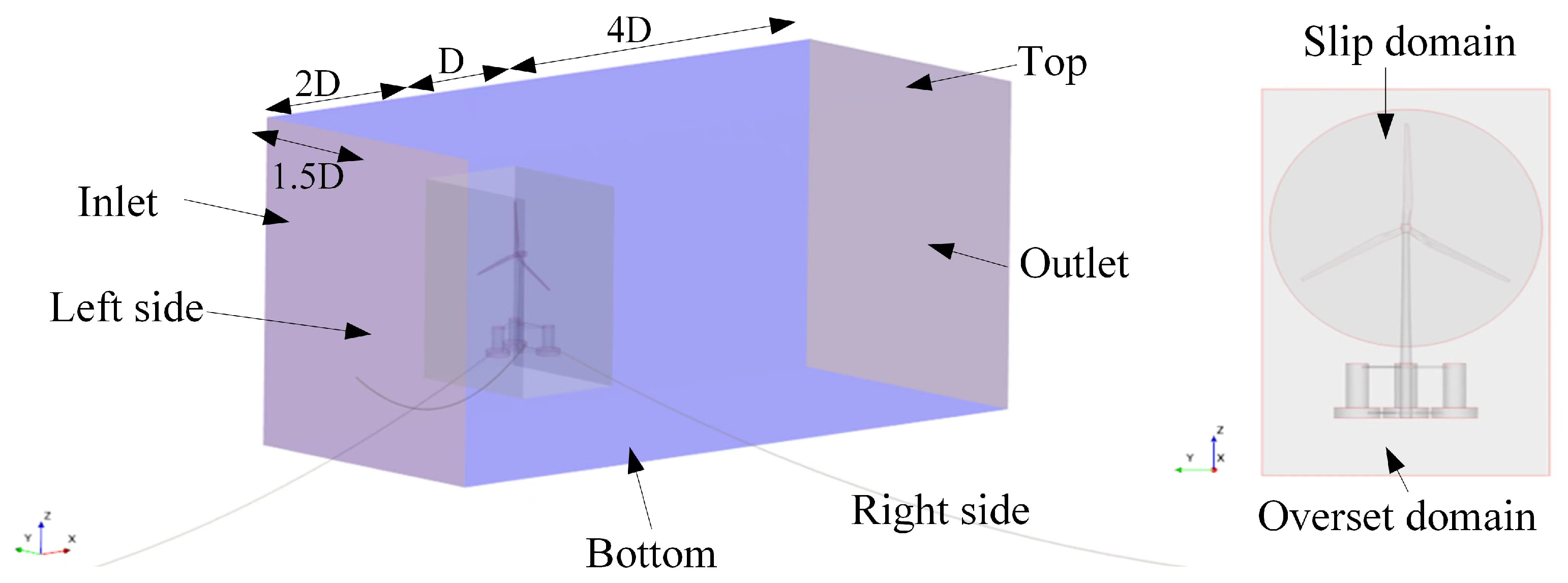
3.2. Setups of the CFD Model
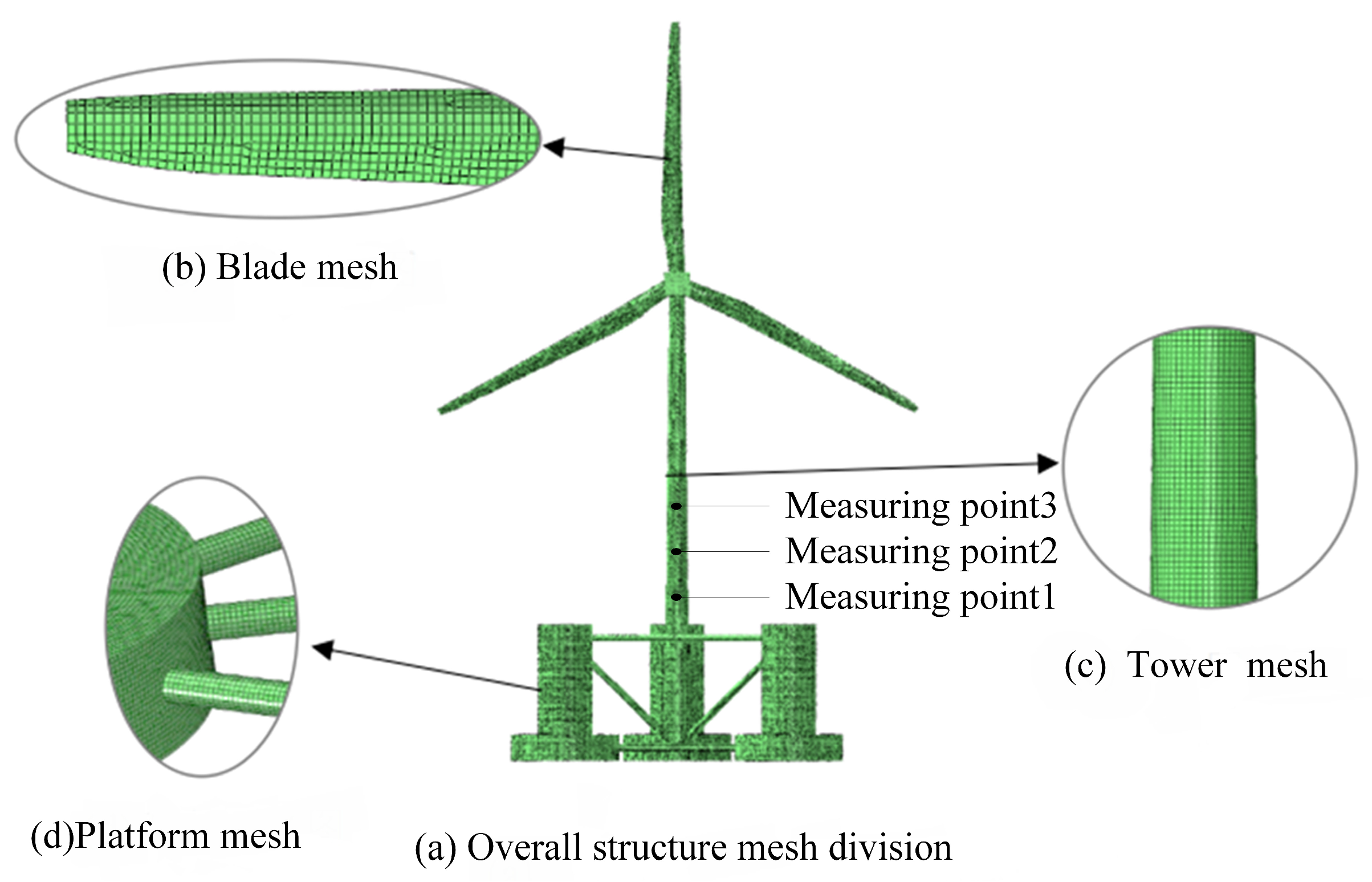
3.3. Setups of the FEA Model
3.4. Ocean Environmental Parameters
4. Results and Discussion
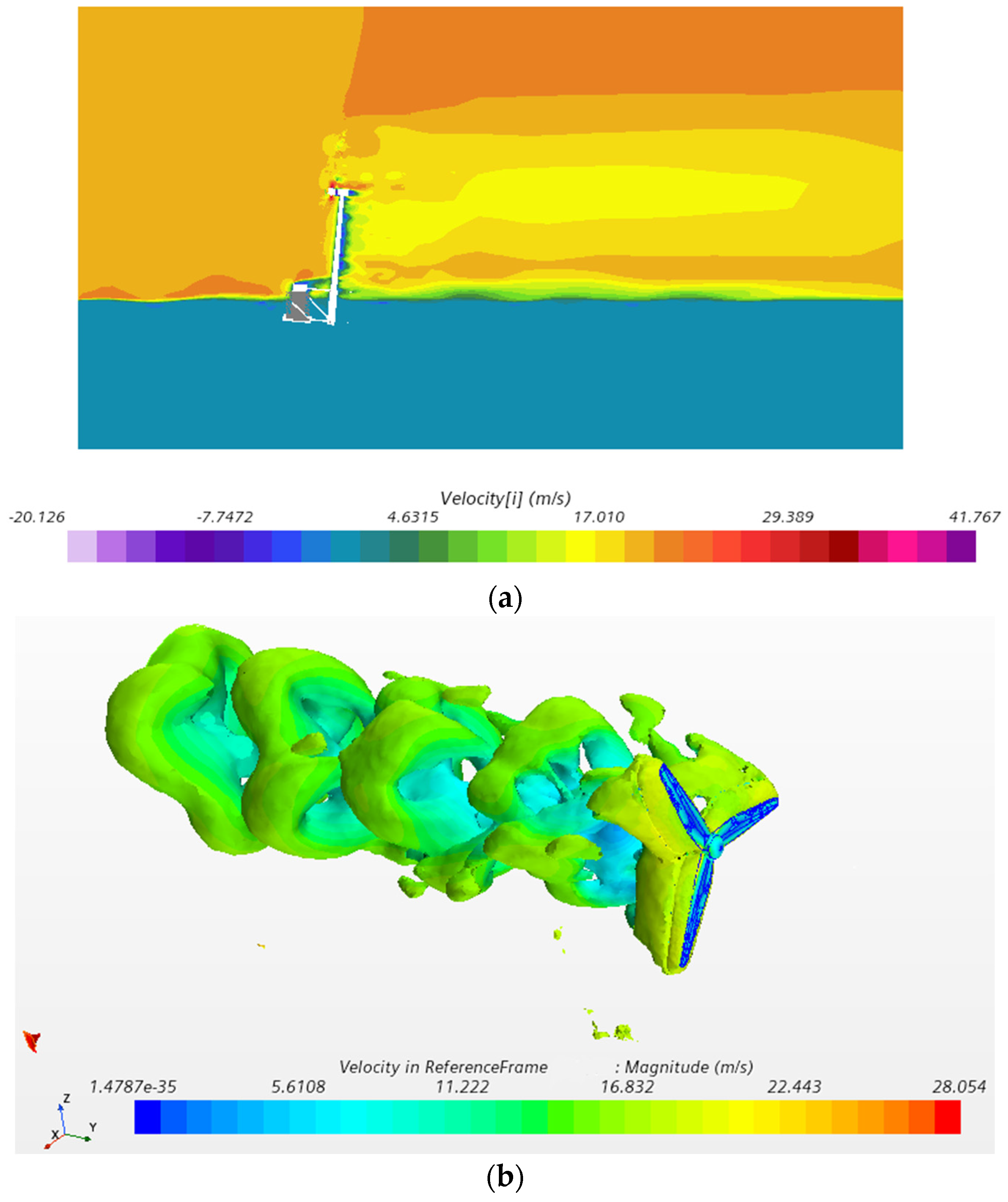
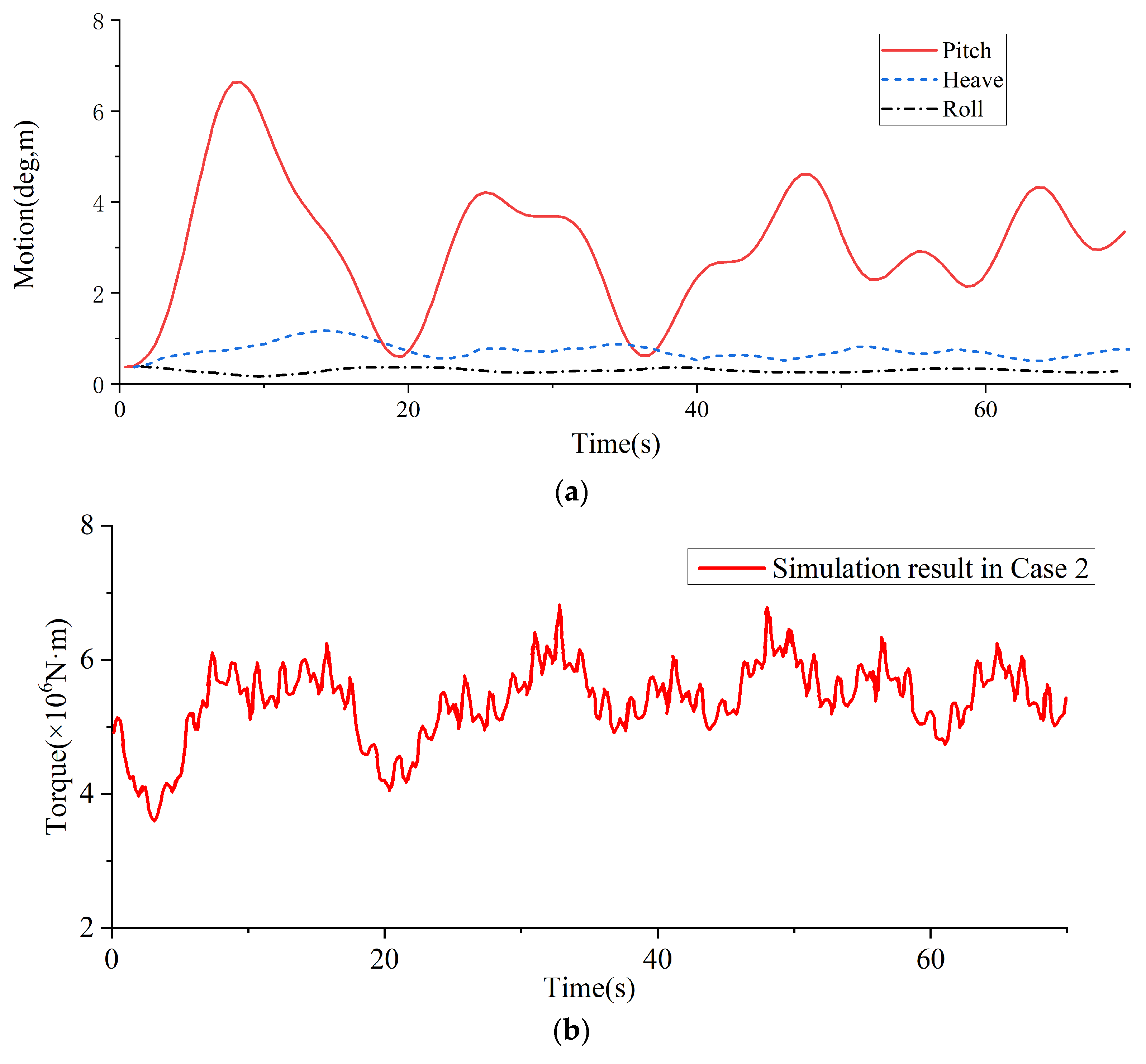
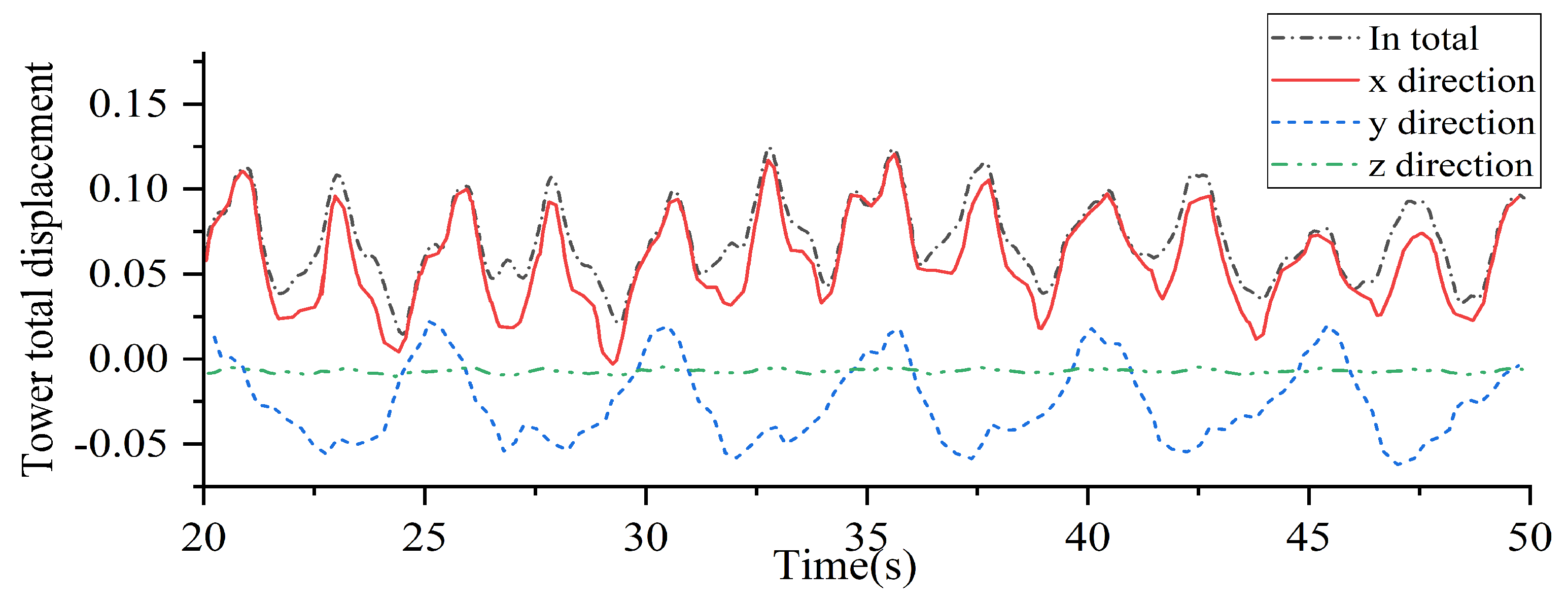
4.1. Analysis of Motion Characteristics of Case 2
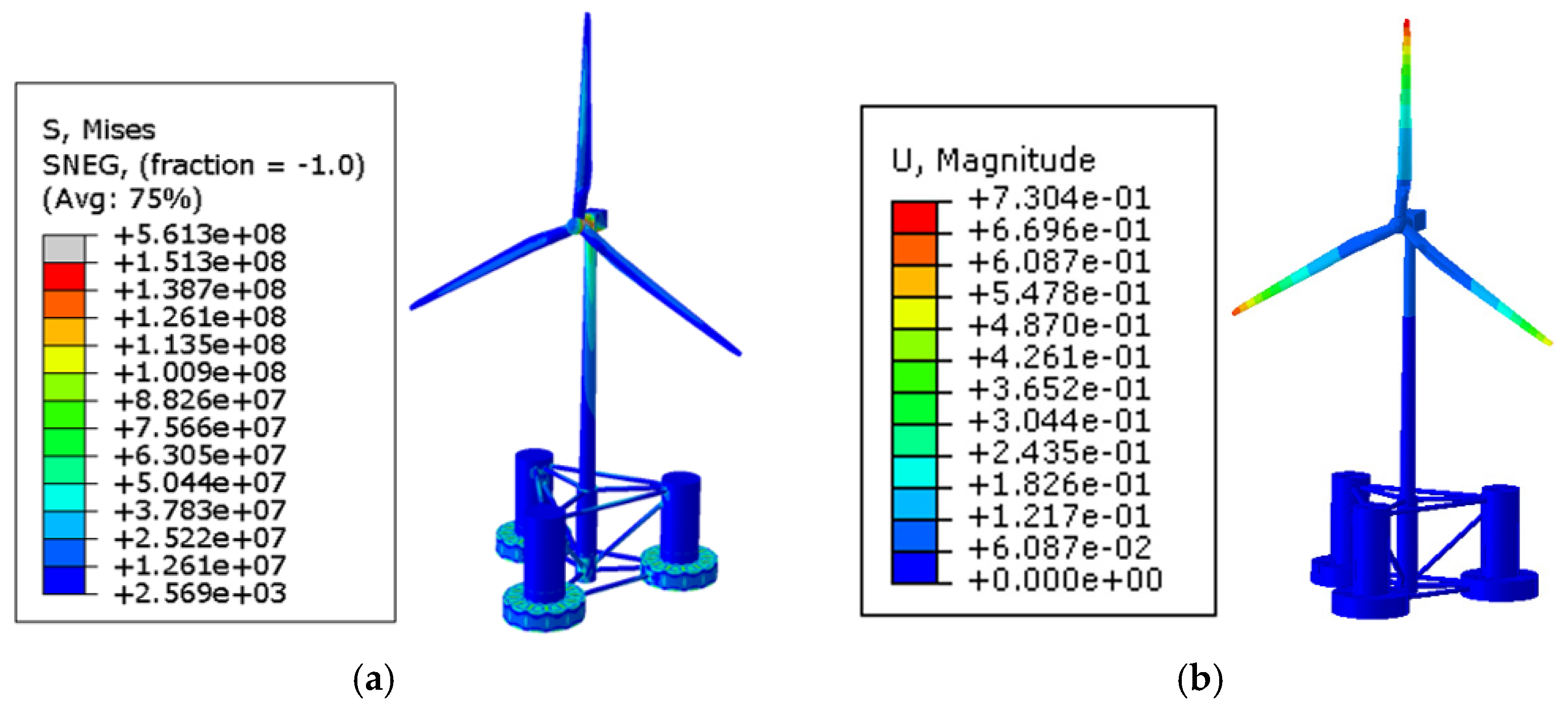
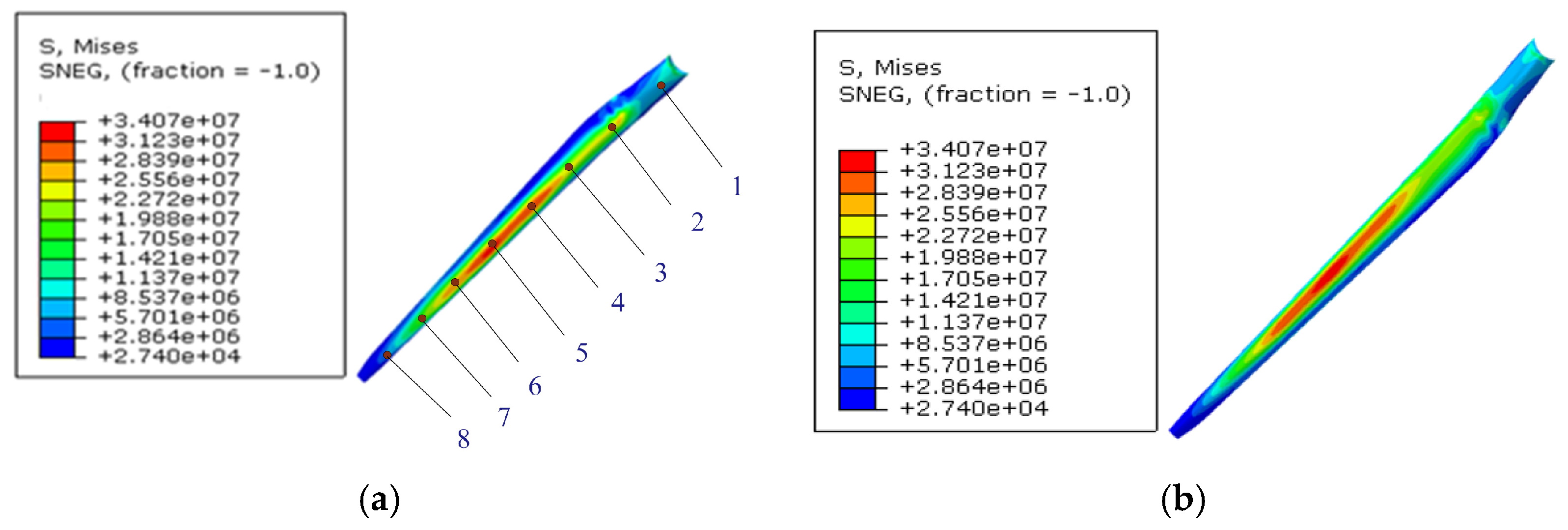
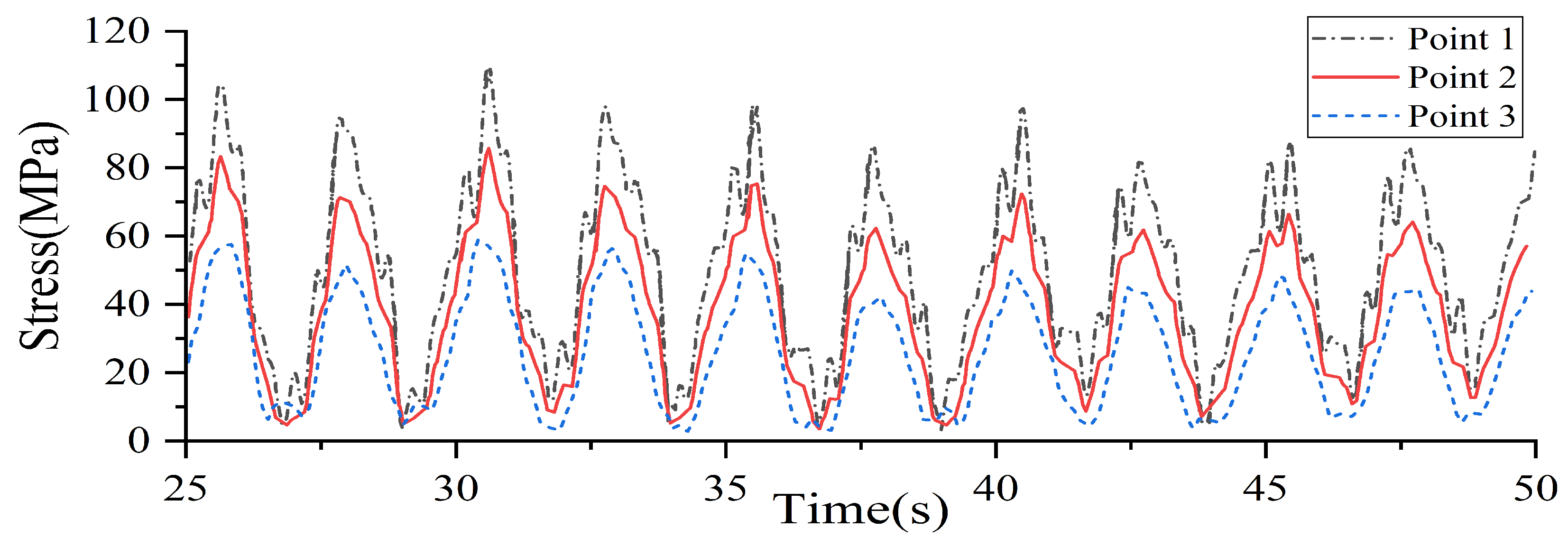
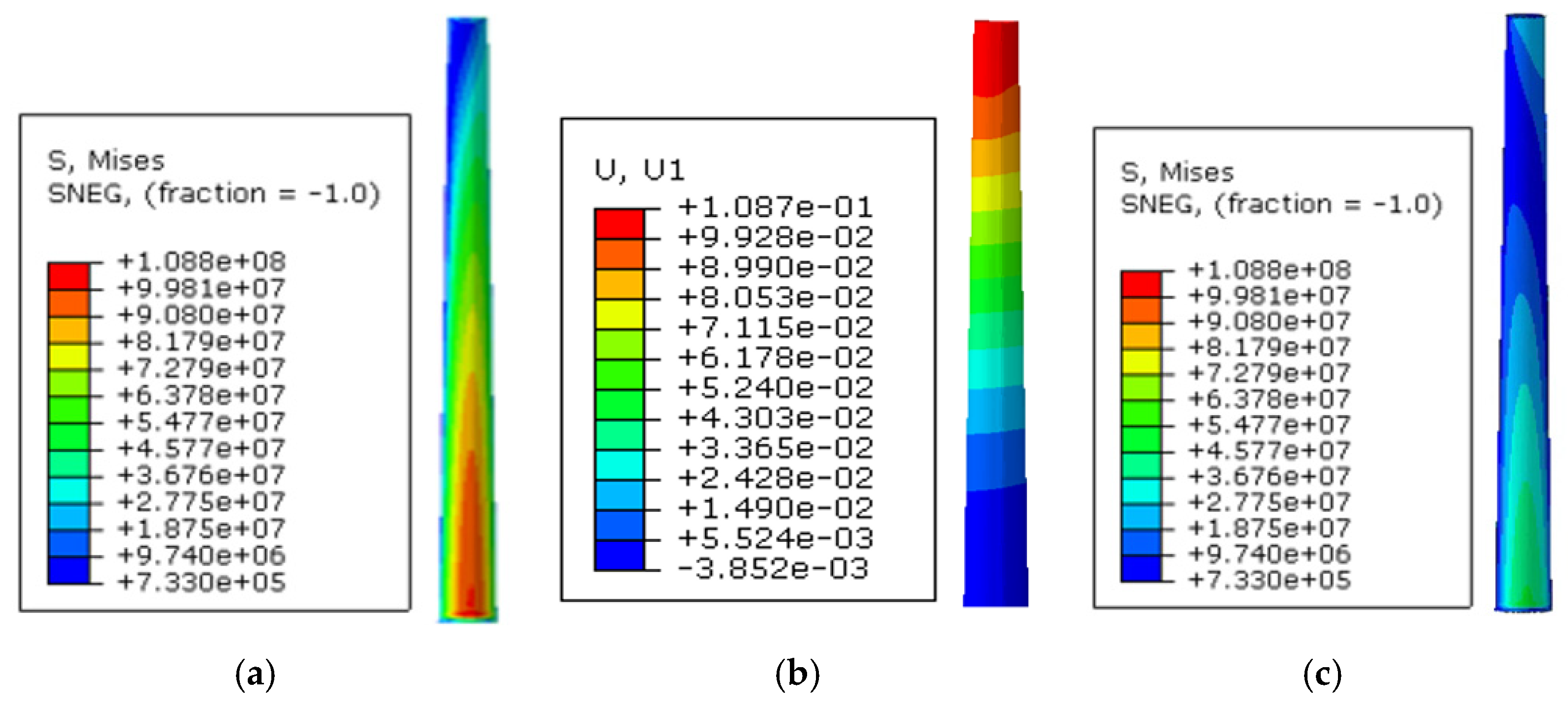
4.2. Analysis of Structural Responses of Case 2
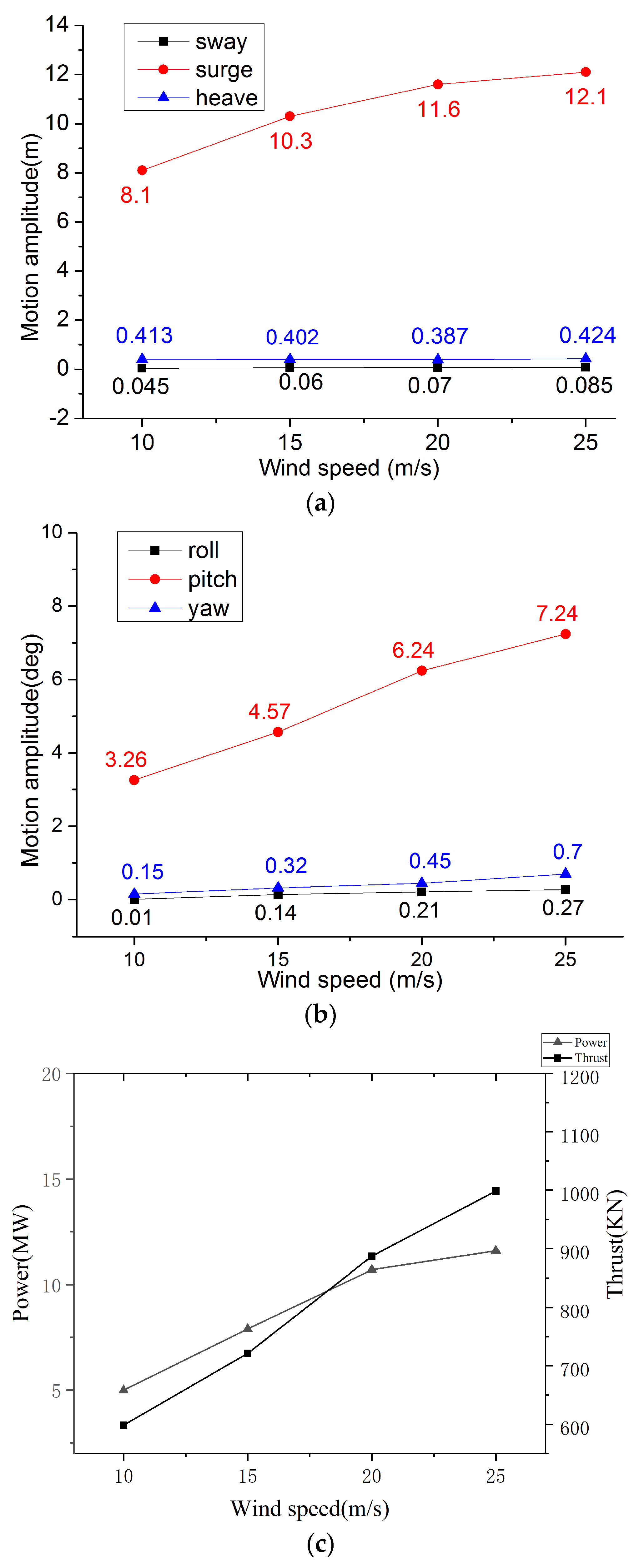
4.3. Wind Speed Effect on Motions and Structural Responses
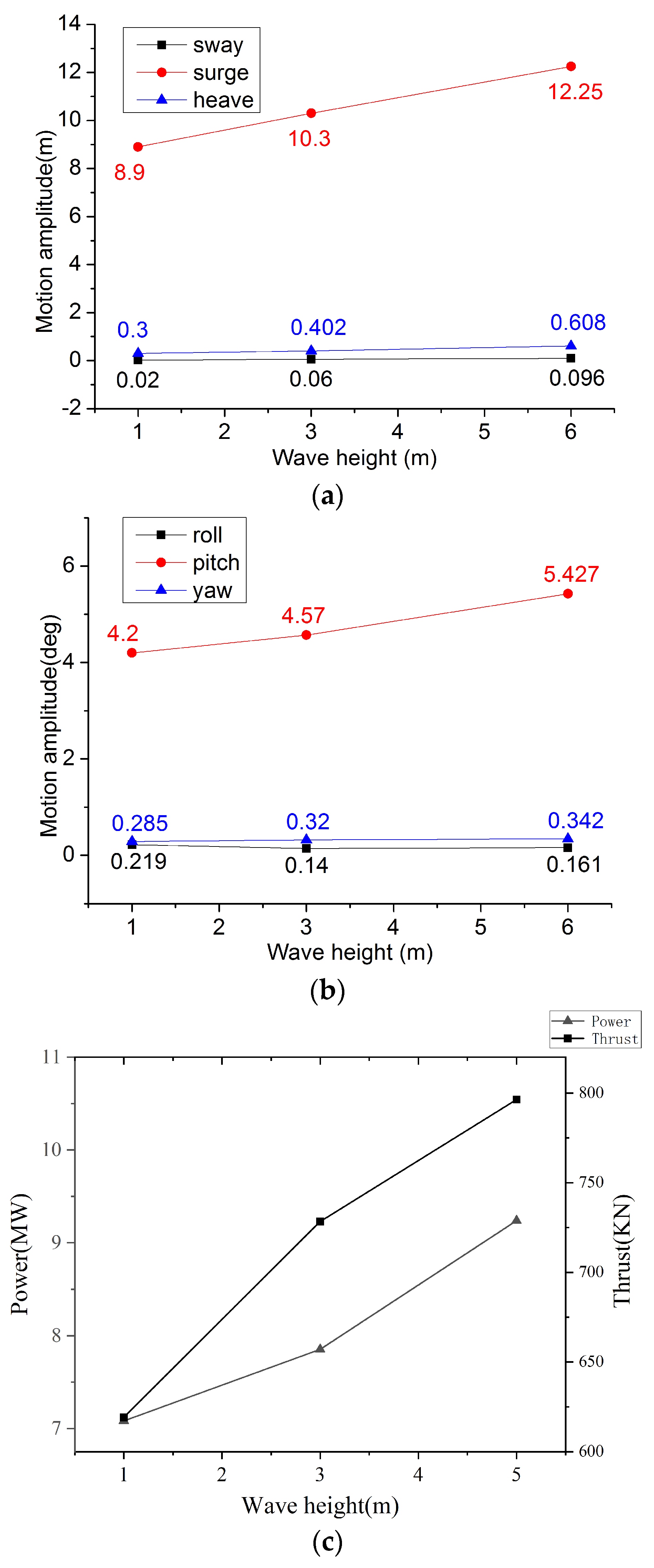
4.4. Wave Height Effect on Motions and Structural Responses
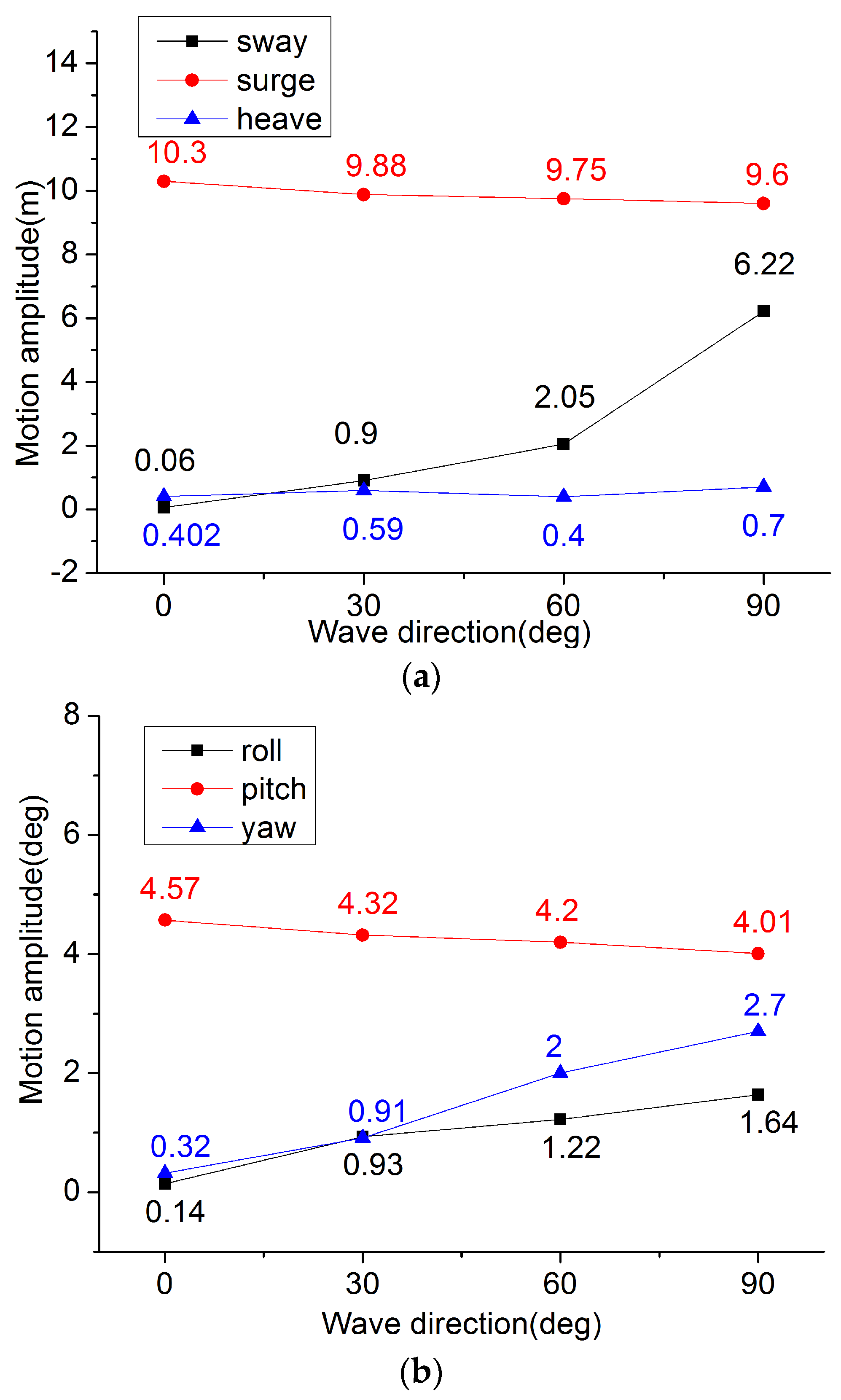
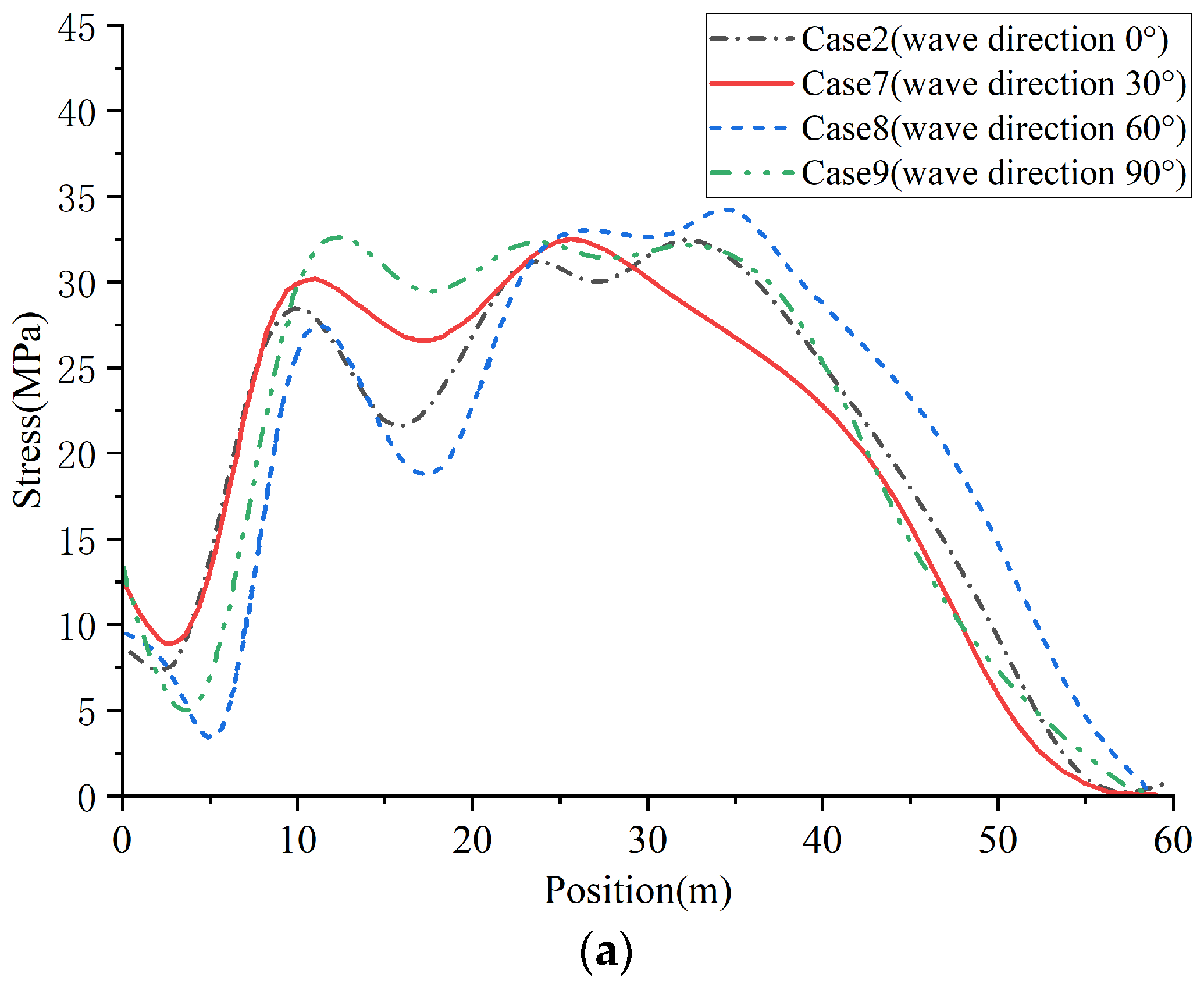
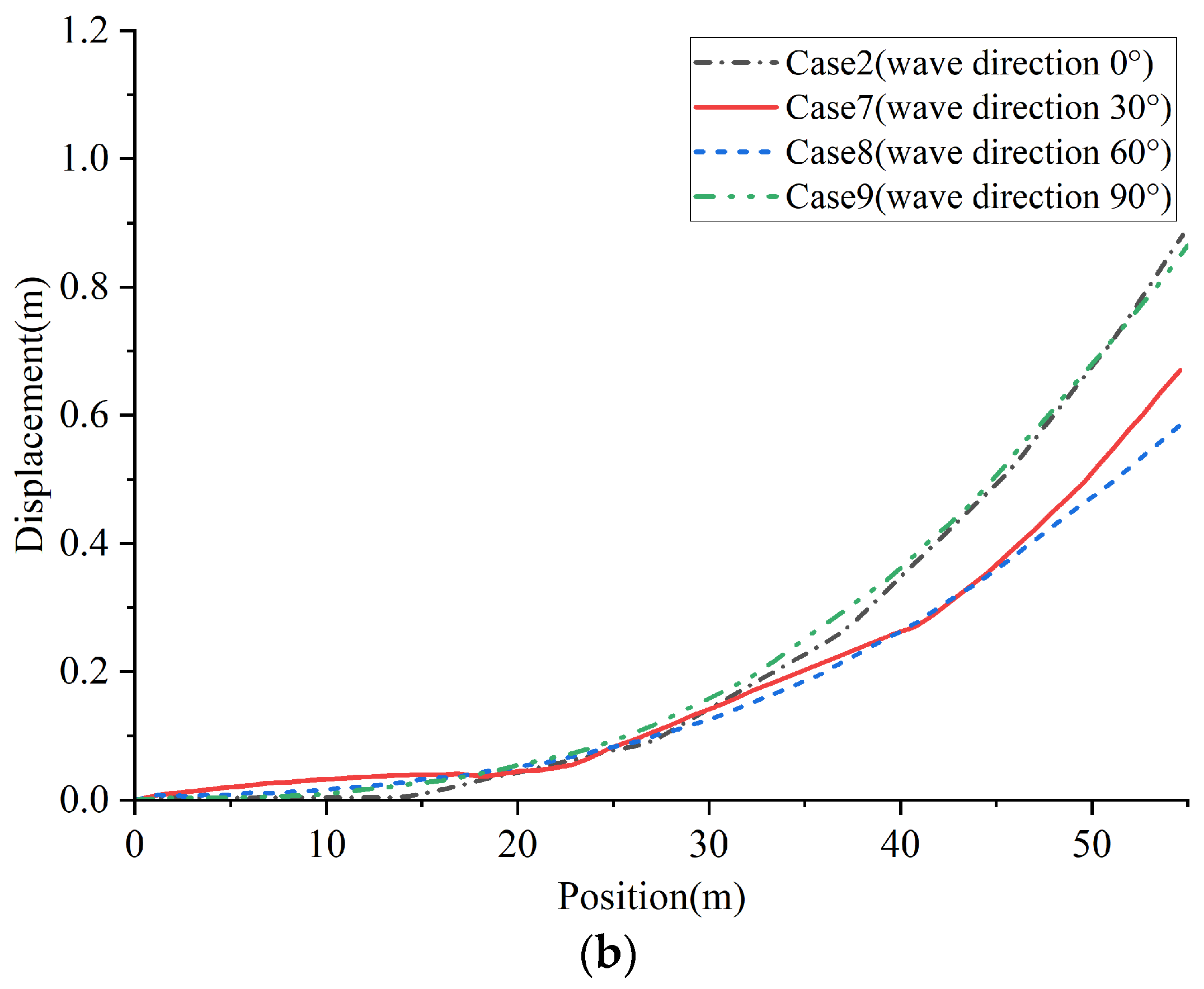
4.5. Wind/Wave Direction Effect on Motions and Structural Responses
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Global Offshore Wind Report. 2022. Available online: https://www.gwec.net/ (accessed on 13 July 2024).
- Roddier, D.; Cermelli, C.; Aubault, A.; Weinstein, A. WindFloat: A floating foundation for offshore wind turbines. J. Renew. Sustain. Energy 2010, 2, 033104. [Google Scholar] [CrossRef]
- Robertson, A.; Jonkman, J.; Masciola, M.; Song, H.; Goupee, A.; Coulling, A.; Luan, C. Definition of the Semisubmersible Floating System for Phase II of OC4; NREL Technical Report; NREL/TP-5000-60601; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2014. [CrossRef]
- Arramach, J.; Boutammachte, N.; Bouatem, A.; Mers, A.A. Prediction of the Wind Turbine Performance by Using a Modified BEM Theory with an Advanced Brake State Model. Energy Procedia 2017, 118, 149–157. [Google Scholar] [CrossRef]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; NREL Technical Report; NREL/TP-500-38060; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2009. [CrossRef]
- Jonkman, J. Dynamics of offshore floating wind turbines-model development and verification. Wind Energy 2010, 12, 459–492. [Google Scholar] [CrossRef]
- Masciola, M.; Robertsen, A.; Jonkman, J.; Driscoll, F. Investigation of a FAST-OrcaFlex Coupling Module for Integrating Turbine and Mooring Dynamics of Offshore Floating Wind Turbines. In Proceedings of the 2011 International Conference on Offshore Wind Energy and Ocean Energy, Beijing, China, 31 October–2 November 2011. [Google Scholar]
- Wu, J. Numerical Simulation of Aerodynamic Performance of Offshore Floating Wind Turbine; Shanghai Jiao Tong University: Shanghai, China, 2016. (In Chinese) [Google Scholar]
- Li, P.; Wan, D.; Hu, C. Fully-Coupled Dynamic Response of a Semi-submerged Floating Wind Turbine System in Wind and Waves. In Proceedings of the 26th International Ocean and Polar Engineering Conference, Rhodes, Greece, 26 June–2 July 2016. [Google Scholar]
- Liu, Y.; Xiao, Q.; Incecik, A.; Peyrard, C.; Wan, D. Establishing a fully coupled CFD analysis tool for floating offshore wind turbines. Renew. Energy 2017, 112, 280–301. [Google Scholar] [CrossRef]
- Cheng, P.; Huang, Y.; Wan, D. A numerical model for fully coupled aero-hydrodynamic analysis of floating offshore wind turbine. Ocean Eng. 2019, 173, 183–196. [Google Scholar] [CrossRef]
- Srensen, N.; Michelsen, J.; Schreck, S. Navier–Stokes predictions of the NREL phase VI rotor in the NASA Ames 80 ft × 120 ft wind tunnel. Wind Energy 2002, 5, 151–169. [Google Scholar] [CrossRef]
- Quallen, S.; Tao, X.; Carrica, P.; Li, Y.; Xu, J. CFD Simulation of a Floating Offshore Wind Turbine System Using a Quasi-Static Crowfoot Mooring-Line Model. In Proceedings of the 23rd International Ocean & Polar Engineering Conference, Anchorage, AK, USA, 30 June–5 July 2013. [Google Scholar]
- Rentschler, M.; Handramouli, P.; Vaz, G.; Vire, A.; Goncalves, R.T. CFD code comparison, verification and validation for decay tests of a FOWT semi-submersible floater. J. Ocean. Eng. Mar. Energy 2023, 9, 233–254. [Google Scholar] [CrossRef]
- Li, X.; Xiao, Q.; Wang, E.; Peyrard, C.; Gonçalves, R.T. The dynamic response of floating offshore wind turbine platform in wave-current condition. Phys. Fluids 2023, 35, 087113. [Google Scholar] [CrossRef]
- Gonçalves, R.T.; Chame, M.E.F.; Silva, L.S.P.D.; Koop, A.; Suzuki, H. Experimental flow-induced motions (FIM) of a FOWT semi-submersible type (OC4 phase II floater). J. Offshore Mech. Arct. Eng. 2021, 143, 012004. [Google Scholar] [CrossRef]
- Miao, W. Study on Fluid-Structure Interaction Response of Wind Turbine and Adaptive Wind Resistance of Blades under Typhoon Environment; University of Shanghai for Science and Technology: Shanghai, China, 2019. (In Chinese) [Google Scholar]
- Yan, J.; Korobenko, A.; Deng, X.; Bazilevs, Y. Computational free-surface fluid-structure interaction with application to floating offshore wind turbines. Comput. Fluids 2016, 141, 155–174. [Google Scholar] [CrossRef]
- Dobrev, I.; Massouh, F. Fluid-structure interaction in the case of a wind turbine rotor. In Proceedings of the 18ème Congrès Français de Mécanique, Grenoble, France, 27–31 August 2007. [Google Scholar]
- Korobenko, A.; Yan, J.; Gohari, S.; Sarkar, S.; Bazilevs, Y. FSI Simulation of two back-to-back wind turbines in atmospheric boundary layer flow. Comput. Fluids 2017, 158, 167–175. [Google Scholar] [CrossRef]
- Liu, W.; Luo, W.; Yang, M.; Xia, T.; Huang, Y.; Wang, S.; Leng, J.; Li, Y. Development of a fully coupled numerical hydroelasto-plastic approach for offshore structure. Ocean Eng. 2022, 258, 111713. [Google Scholar] [CrossRef]
- Luo, W.; Liu, W.; Chen, S.; Zou, Q.; Song, X. Development and Application of an FSI Model for Floating VAWT by Coupling CFD and FEA. J. Mar. Sci. Eng. 2024, 12, 683. [Google Scholar] [CrossRef]
- ASME V&V 20-2009; Standard for Verification and Validation in Computational Fluid Dynamics and Heat Transfer. American Society of Mechanical Engineers: New York, NY, USA, 2009.
- Jiao, J.; Huang, S.; Tezdogan, T.; Terziev, M.; Soares, C.G. Slamming and green water loads on a ship sailing in regular waves predicted by a coupled CFD–FEA approach. Ocean Eng. 2021, 241, 110107. [Google Scholar] [CrossRef]
- The Grade of Wind Speed; Maritime Safety Administration of the People’s Republic of China: Beijing, China, 2017.
- Imiela, M.; Wienke, F.; Rautmann, C.; Wilberg, C.; Hilmer, P.; Krumme, A. Towards Multidisciplinary Wind Turbine Design Using High- Fidelity Methods. In Proceedings of the 33rd Wind Energy Symposium, Kissimmee, FL, USA, 5–9 January 2015; pp. 1–12. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Project | Parameter |
|---|---|
| Wheel orientation Number of blades | Upwind Three blades |
| Wind wheel radius Rotor radius | 126 m 3 m |
| Cut in wind speed Rated wind speed Cut out wind speed | 3 m/s 11.4 m/s 25 m/s |
| Cut in rotational speed Rated rotational speed Cut out rotational speed | 6.9 rpm 12.1 rpm 12.1 rpm |
| Extension Elevation Cone Angle | 5 m 5° 2.5° |
| Project | Parameter |
|---|---|
| Draft | 20 m |
| Barycenter (Below the waterline) | 13.46 m |
| Platform mass (Including ballast water) | 1.3473 × 107 kg |
| Height to the top of the tower (Above the waterline) | 87.6 m |
| Meshes | Mesh Size for Blade (m) | Mesh Size for Platform (m) | The Number of Cells (Million) | Thrust (kN) | Pitch (°) | Computational Cost (Hour) |
|---|---|---|---|---|---|---|
| Mesh1 | 0.20 | 0.55 | 4.98 | 170.5 | 1.88 | 145 |
| Mesh2 | 0.15 | 0.48 | 7.07 | 172.5 | 1.98 | 168 |
| Mesh3 | 0.10 | 0.34 | 9.86 | 175.2 | 2.12 | 235.2 |
| Mesh4 | 0.08 | 0.24 | 11.26 | 176.3 | 2.14 | 271.2 |
| Calculation Domain | Boundary Name | Boundary Condition |
|---|---|---|
| Background domain | Inlet | Velocity inlet |
| Outlet | Pressure outlet | |
| Left side | Wall | |
| Right side | Wall | |
| Top | Wall | |
| Bottom | Wall | |
| Overset domain | Platform and tower | Wall |
| The interface on the blade rotating and fixed region | Velocity inlet | |
| Rotating Region | The interface on the blade rotating and fixed region | Velocity inlet |
| Blade model | Wall |
| Physical Parameter | Fiberglass | AH36 |
|---|---|---|
| Density (kg × m−3) | 1160 | 7850 |
| Elasticity (GPa) | 72 | 210 |
| Poisson’s ratio | 0.42 | 0.3 |
| Case Number | Type of Condition | Wind Speed (m/s) | Wave Height (m) | Wind/Wave Direction (°) |
|---|---|---|---|---|
| Case 1 | Wind speed | 10 | 3 | 0 |
| Case 2 | 15 | 3 | 0 | |
| Case 3 | 20 | 3 | 0 | |
| Case 4 | 25 | 3 | 0 | |
| Case 5 | Wave height | 15 | 1 | 0 |
| Case 2 | 15 | 3 | 0 | |
| Case 6 | 15 | 6 | 0 | |
| Case 2 | Direction of the wind and waves | 15 | 3 | 0 |
| Case 7 | 15 | 3 | 30 | |
| Case 8 | 15 | 3 | 60 | |
| Case 9 | 15 | 3 | 90 |
| Rigid | Flexible | The Averaged Value in Case 2 | The Error between the Flexible and the Result of Case 2 | |
|---|---|---|---|---|
| Thrust [kN] | 780 | 808 | 802 | 0.74% |
| Torque [kN·m] | 4373 | 4469 | 4857 | 8.68% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, X.; Bi, X.; Liu, W.; Guo, X. Numerical Simulation of a Floating Offshore Wind Turbine in Wind and Waves Based on a Coupled CFD–FEA Approach. J. Mar. Sci. Eng. 2024, 12, 1385. https://doi.org/10.3390/jmse12081385
Song X, Bi X, Liu W, Guo X. Numerical Simulation of a Floating Offshore Wind Turbine in Wind and Waves Based on a Coupled CFD–FEA Approach. Journal of Marine Science and Engineering. 2024; 12(8):1385. https://doi.org/10.3390/jmse12081385
Chicago/Turabian StyleSong, Xuemin, Xueqing Bi, Weiqin Liu, and Xiaoxuan Guo. 2024. "Numerical Simulation of a Floating Offshore Wind Turbine in Wind and Waves Based on a Coupled CFD–FEA Approach" Journal of Marine Science and Engineering 12, no. 8: 1385. https://doi.org/10.3390/jmse12081385
APA StyleSong, X., Bi, X., Liu, W., & Guo, X. (2024). Numerical Simulation of a Floating Offshore Wind Turbine in Wind and Waves Based on a Coupled CFD–FEA Approach. Journal of Marine Science and Engineering, 12(8), 1385. https://doi.org/10.3390/jmse12081385