

Wave-Current Interaction Effects on the OC4 DeepCwind Semi-Submersible Floating Offshore Wind Turbine



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
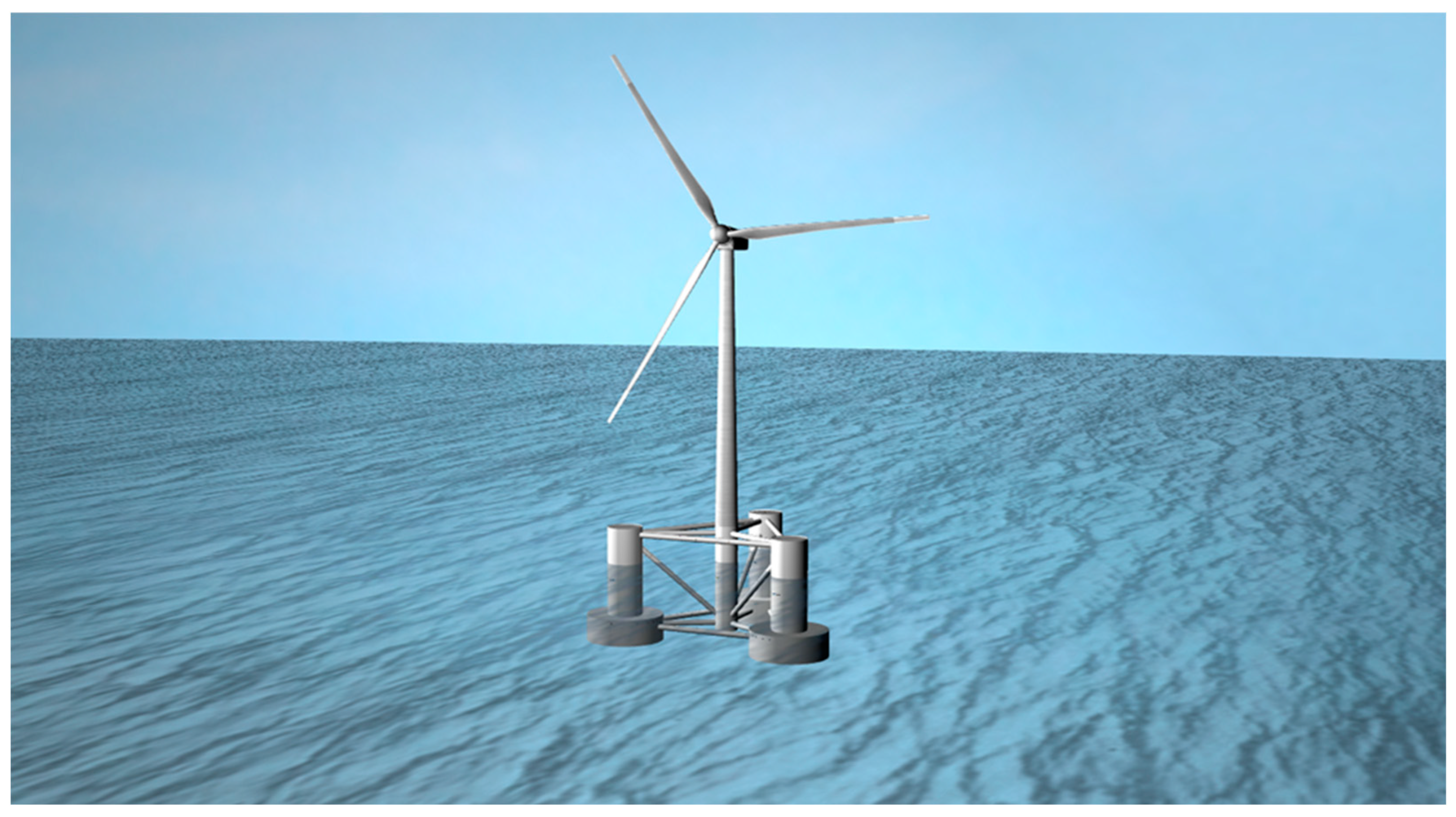
2. The OC4 Semisubmersible Platform Geometry
3. Solution of the Hydrodynamic Problem
3.1. Wave-Structure Solution
3.1.1. The In-House Code HAMVAB
3.1.2. The In-House Code HAQi
3.2. Wave and Current Solution
3.2.1. First-Order Loads
3.2.2. Mean Second-Order Drift Forces in the Presence of Co-Existing Wave and Current Fields
4. Results
4.1. Comparisons without the Current
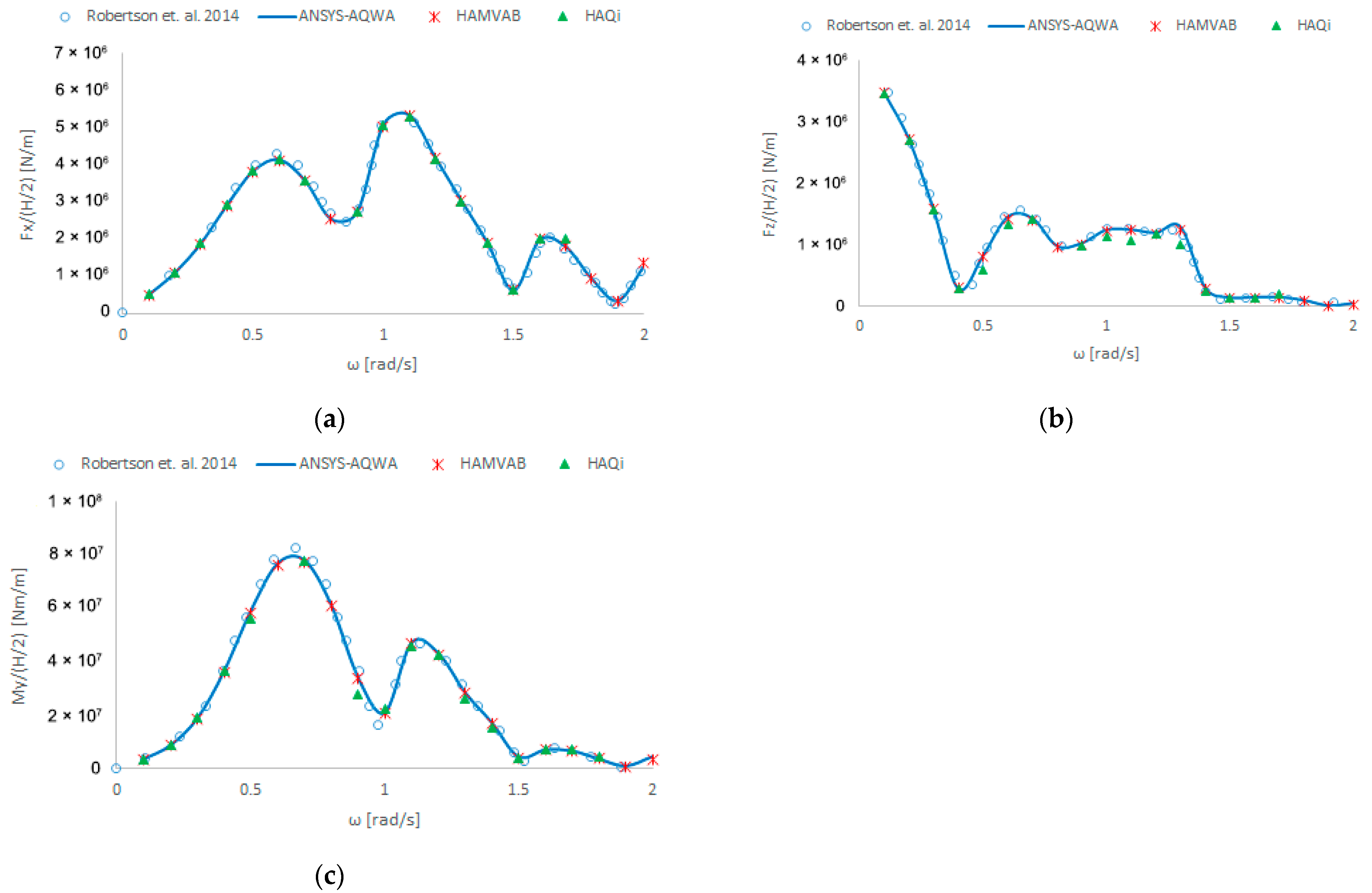
4.1.1. Exciting Wave Loads: 0-Degree Wave Heading
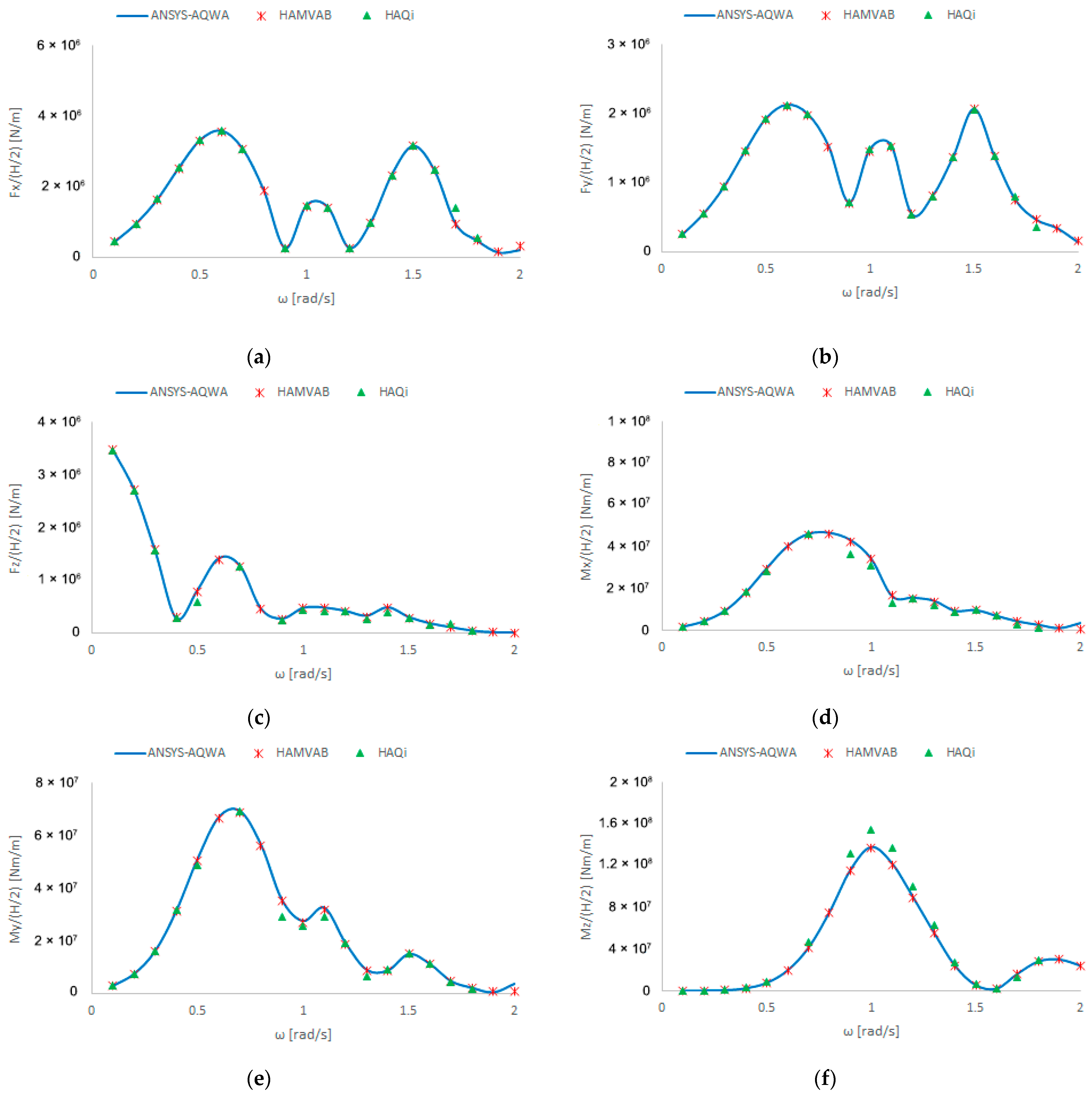
4.1.2. Exciting Wave Loads: 30-Degree Wave Heading
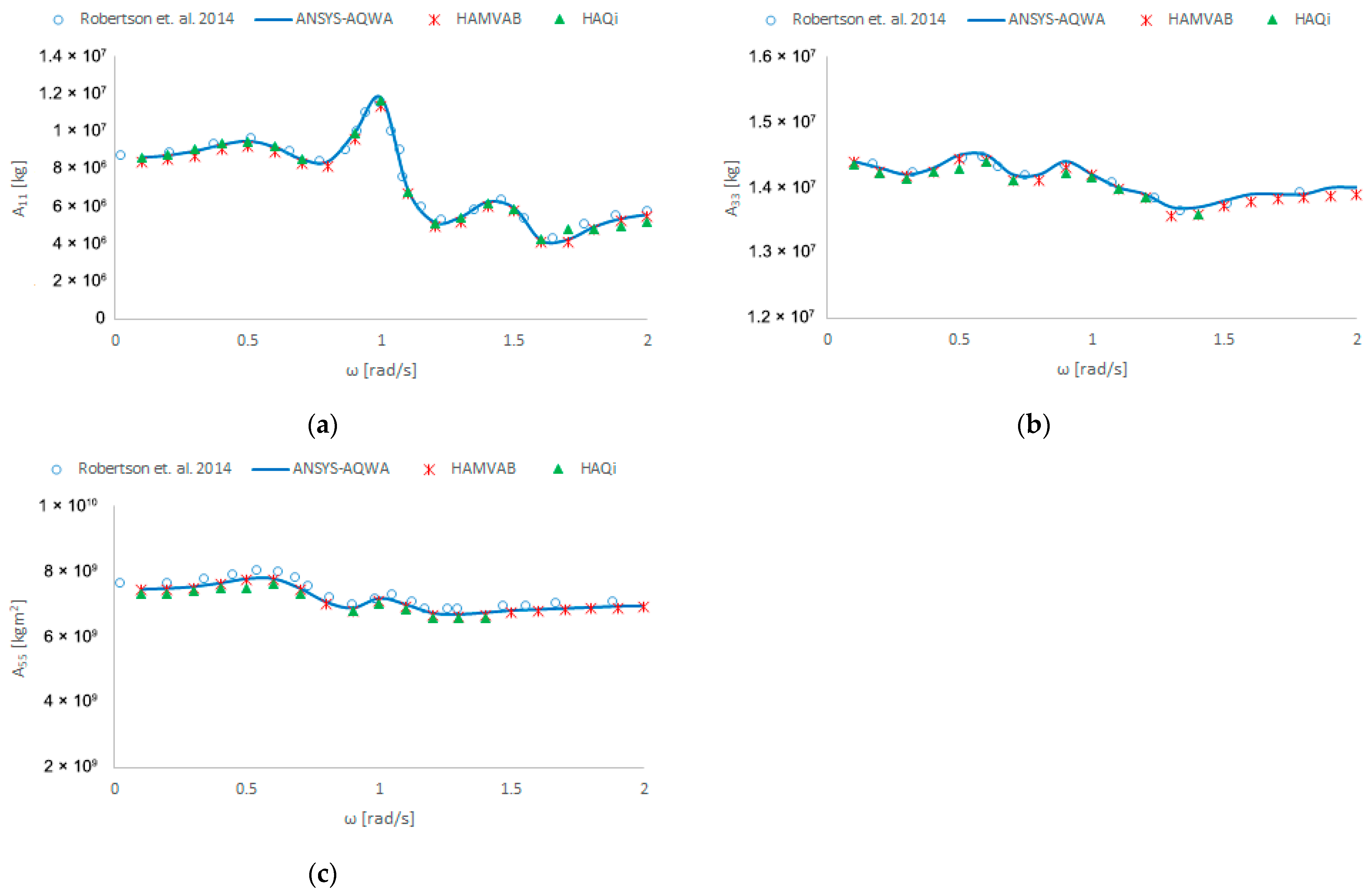
4.1.3. Added Masses
4.1.4. Hydrodynamic Damping
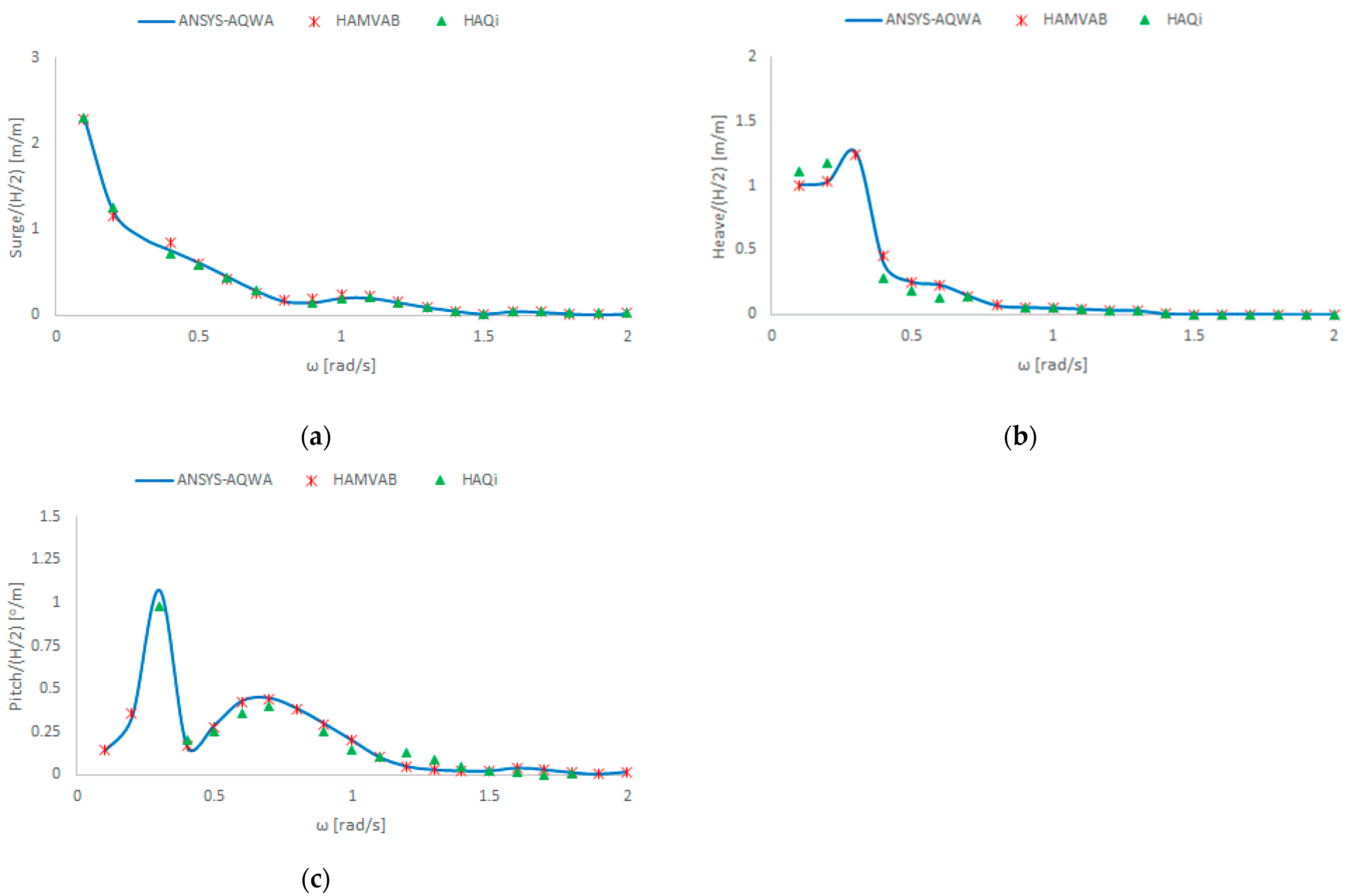
4.1.5. Response Amplitude Operators of Motion: 0-Degree Wave Heading
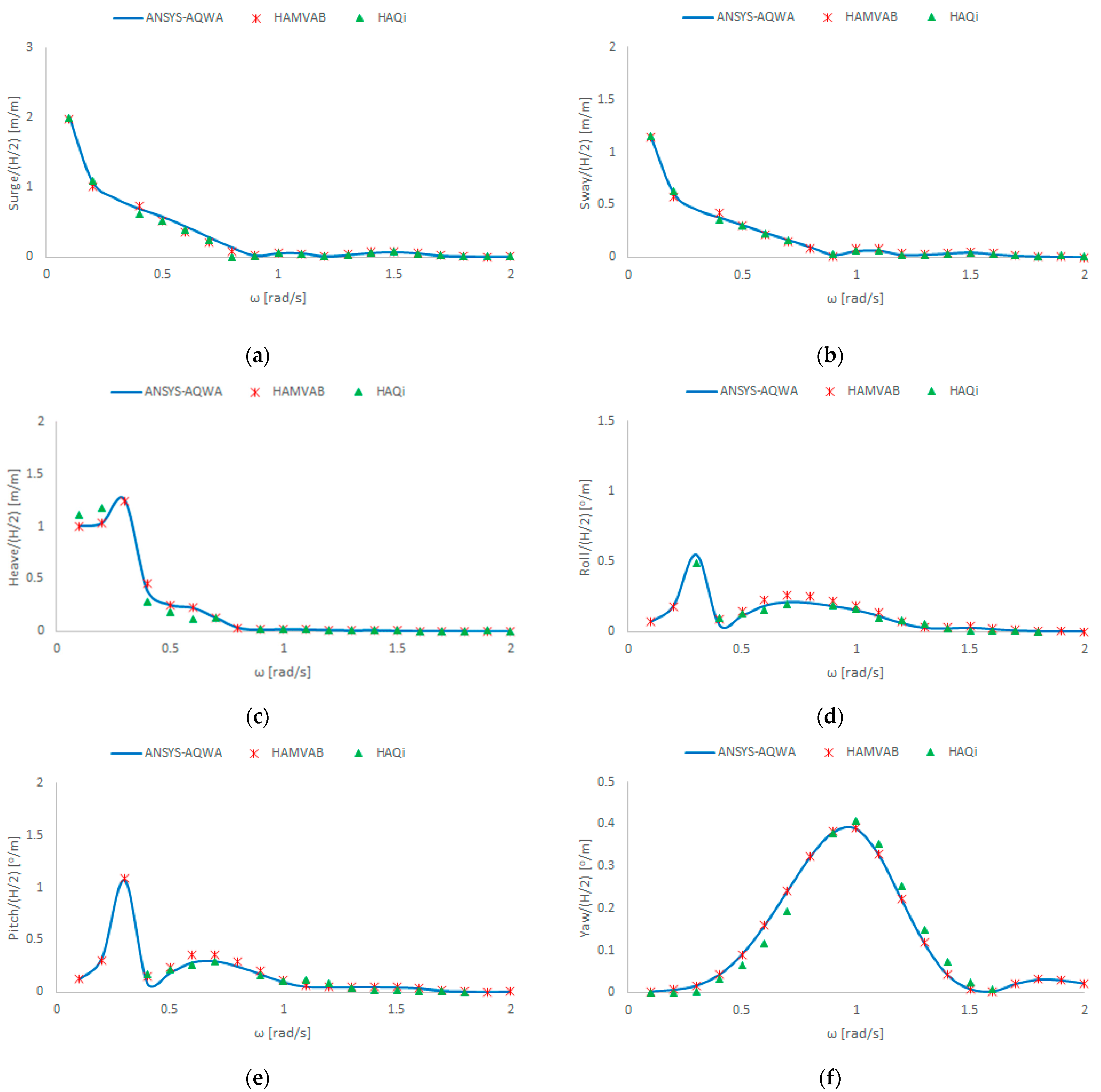
4.1.6. Response Amplitude Operators of Motion: 30-Degree Wave Heading
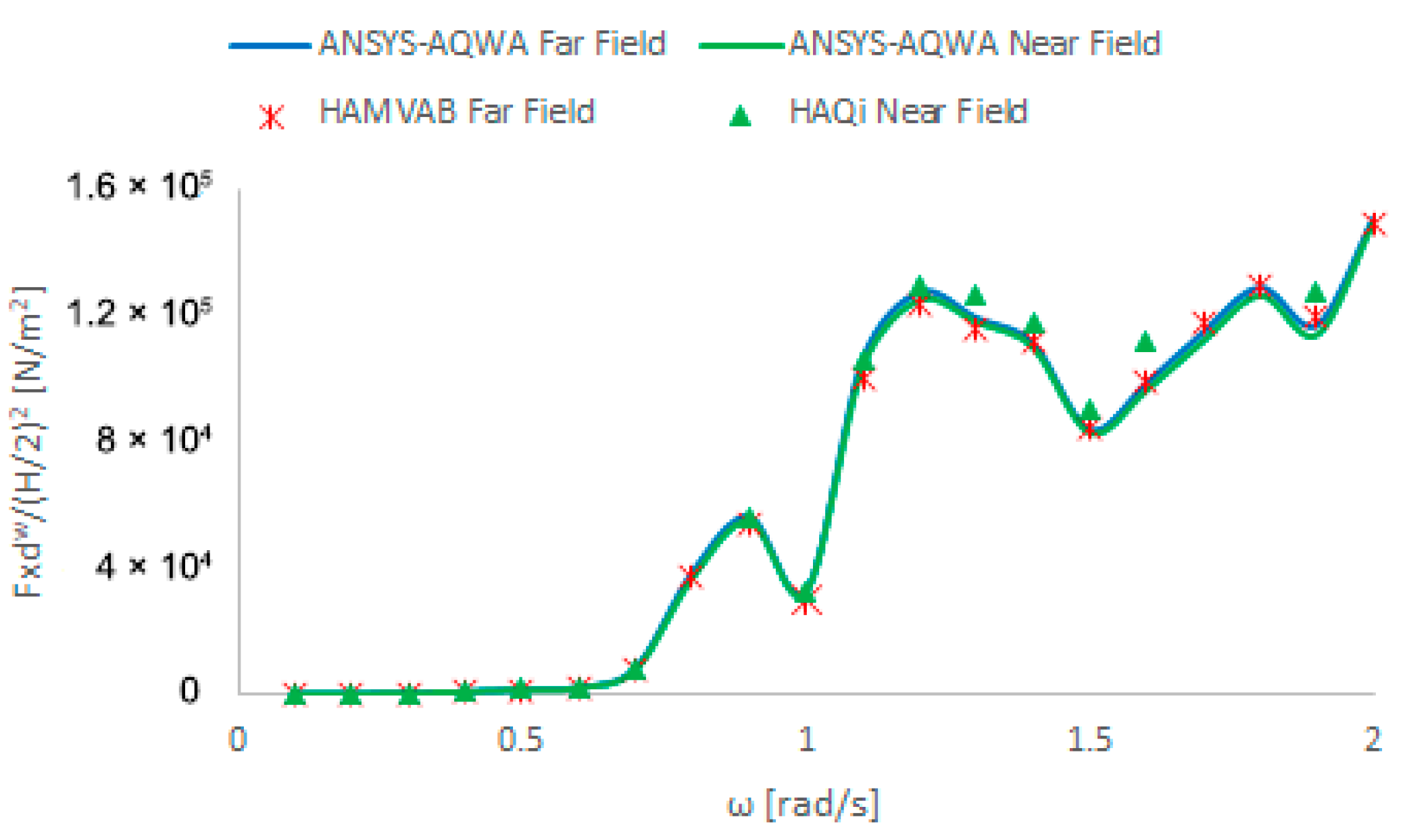
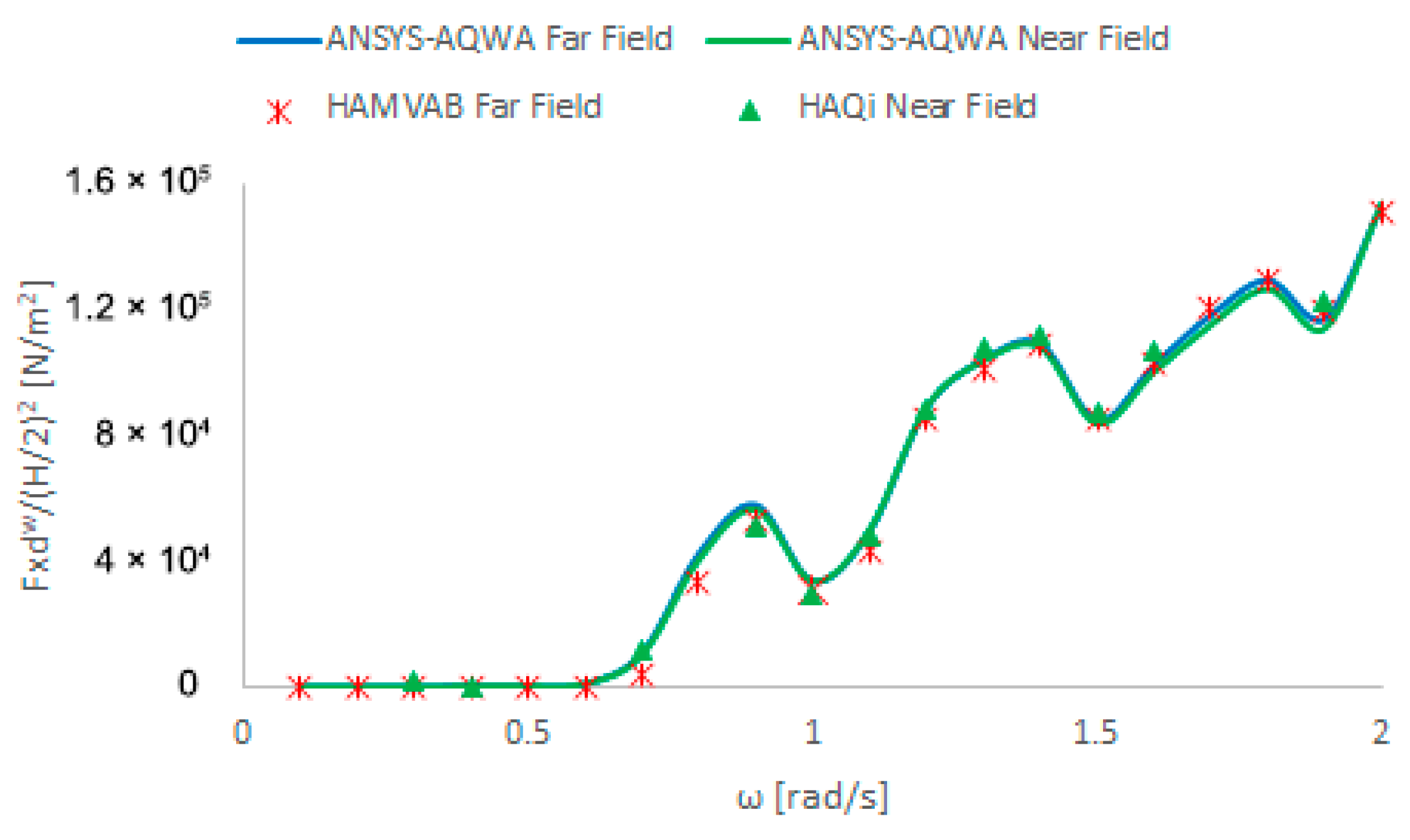
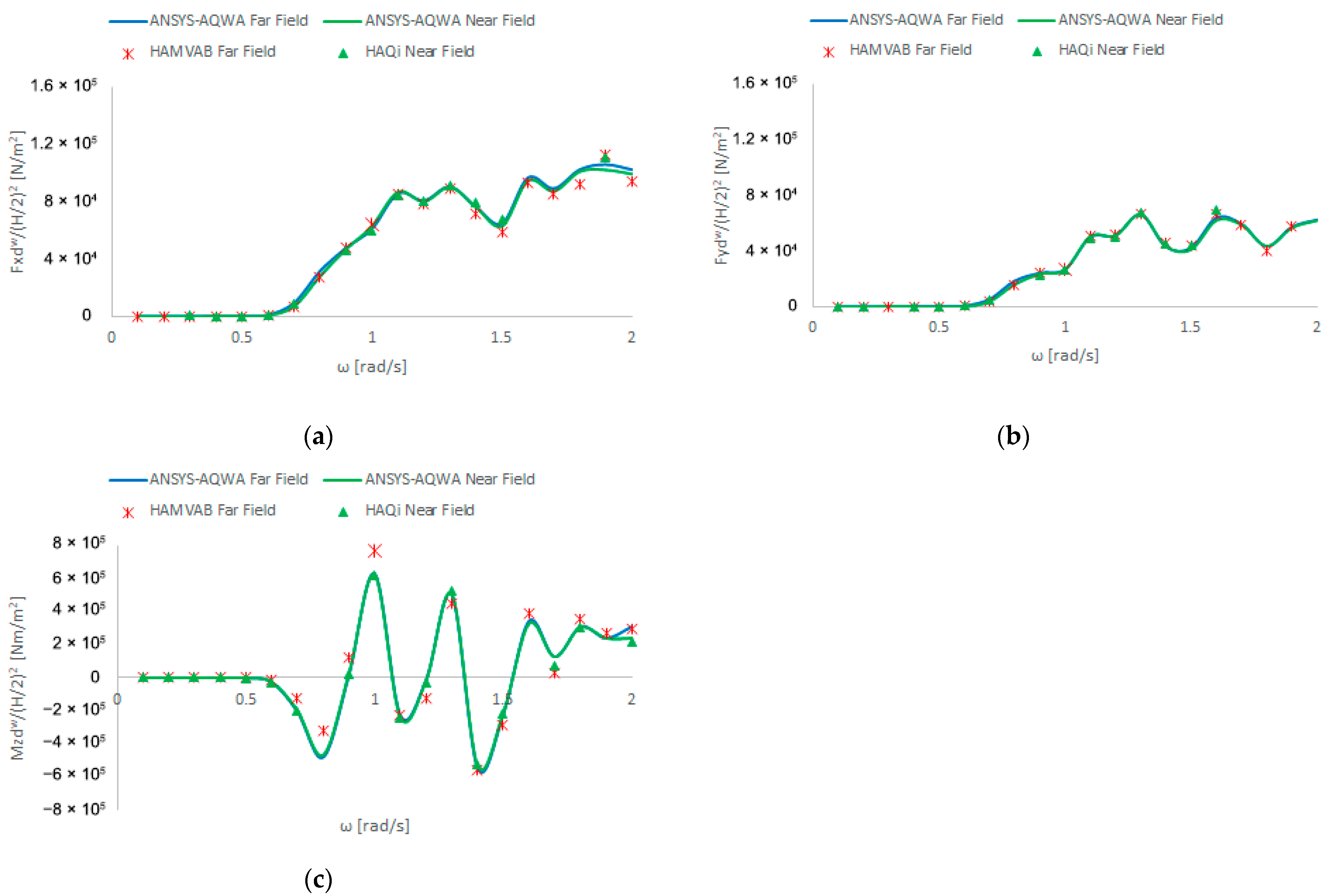
4.1.7. Mean Second-Order Wave-Drift Forces and Moments: 0- and 30-Degree Wave Headings
4.2. Numerical Results for the Case of Coexisting Wave and Current Fields
4.2.1. Exciting Wave Loads: 0-Degree Wave and Current Headings
4.2.2. Exciting Wave Loads: 30-Degree Wave and 0-Degree Current Headings
4.2.3. Added Masses Wave and Current
4.2.4. Hydrodynamic Damping Wave and Current
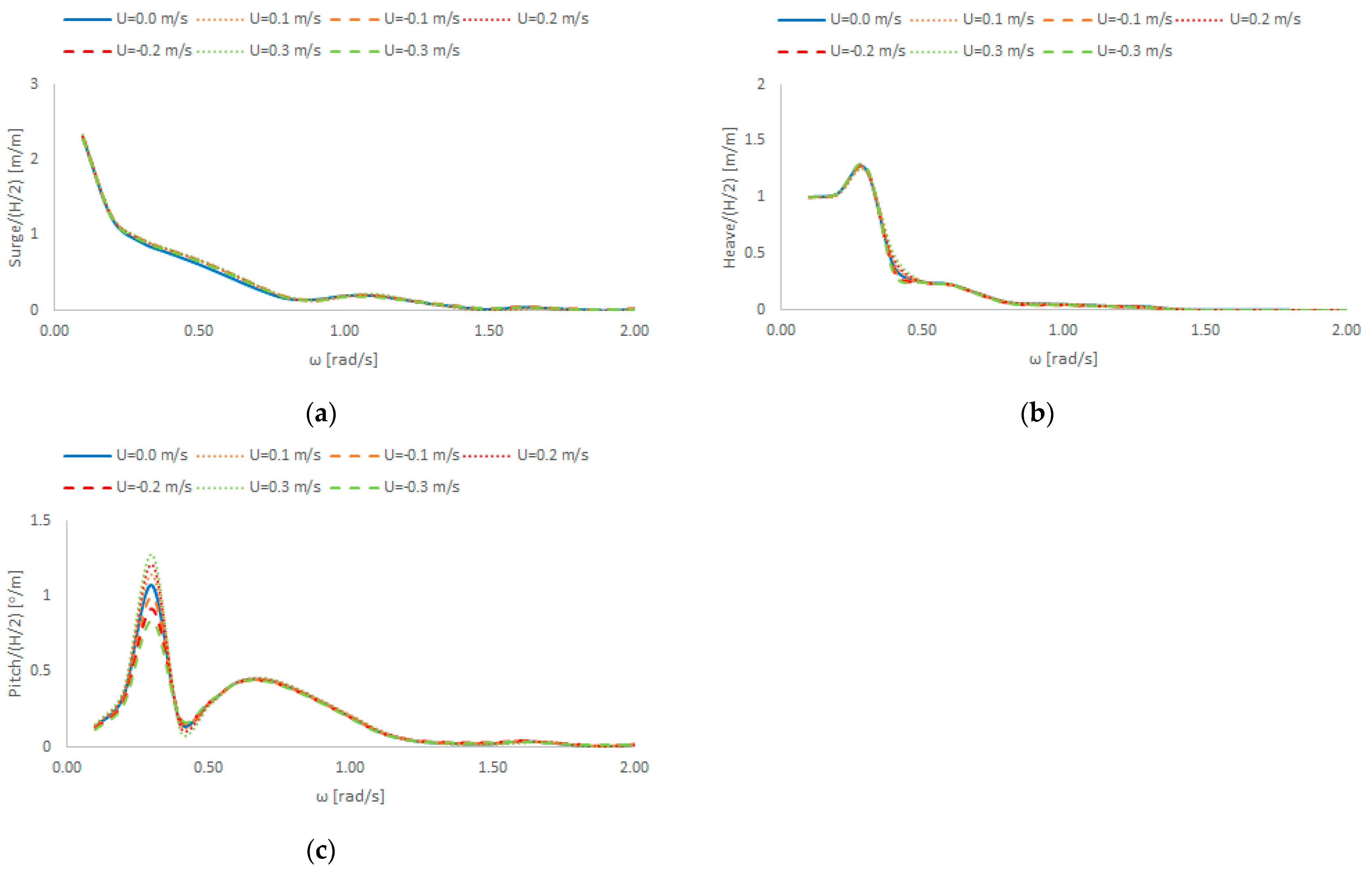
4.2.5. Motion’s Response Amplitude Operators in Wave and Current Fields: 0-Degree Wave and Current Headings
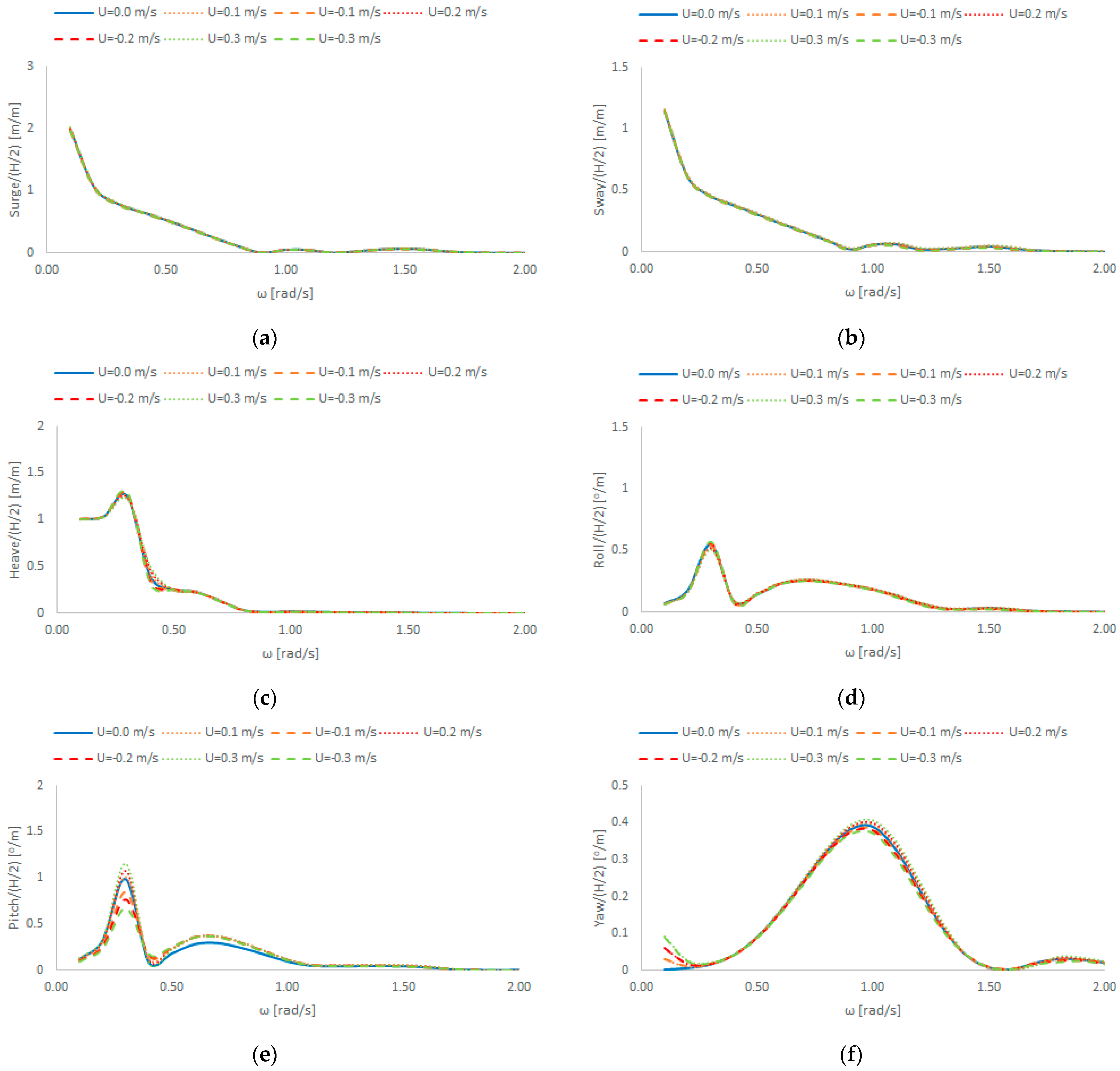
4.2.6. Motion’s Response Amplitude Operators in Wave and Current Fields: 30-Degree Wave Incidence and 0-Degree Current Headings
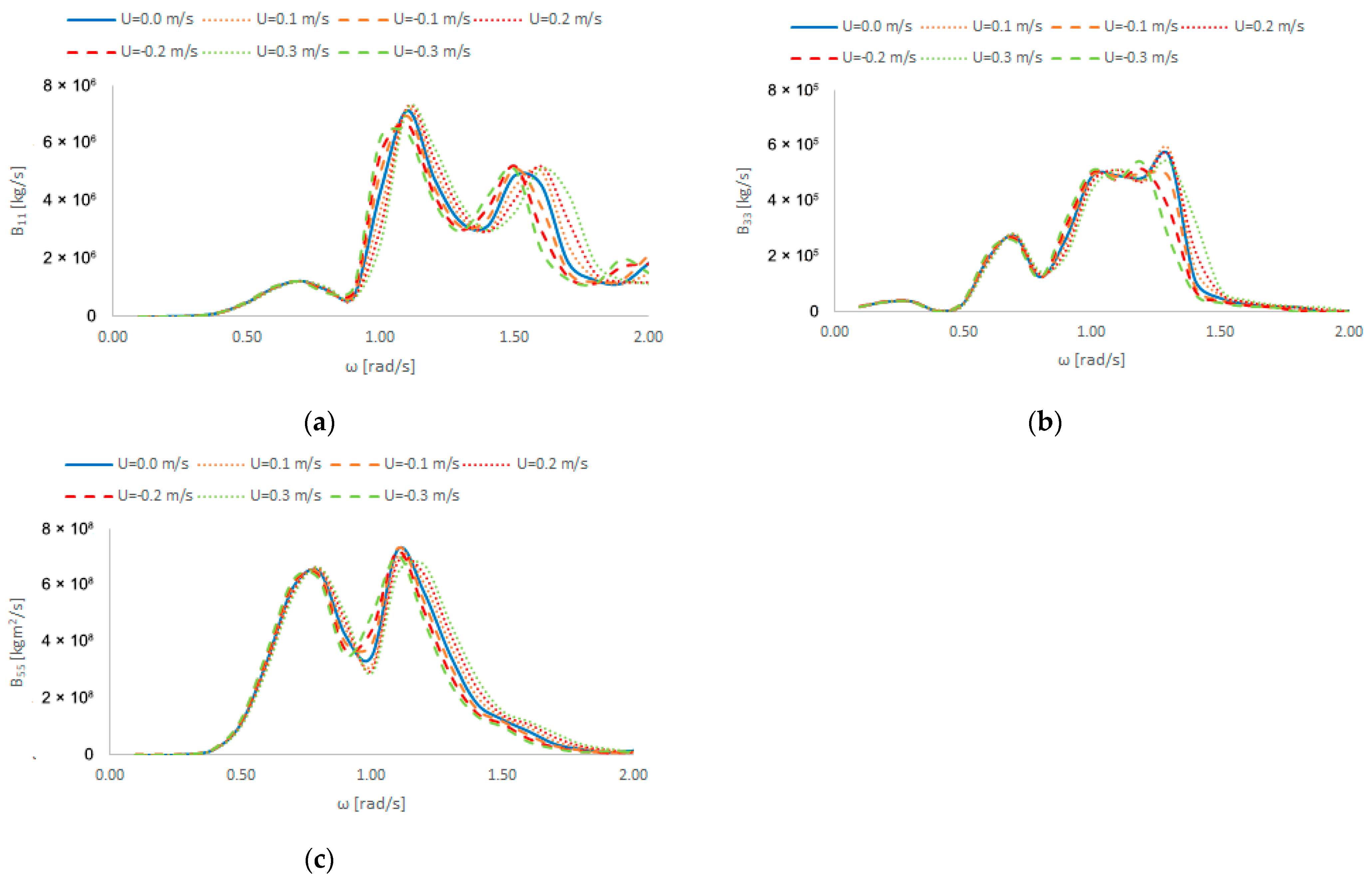
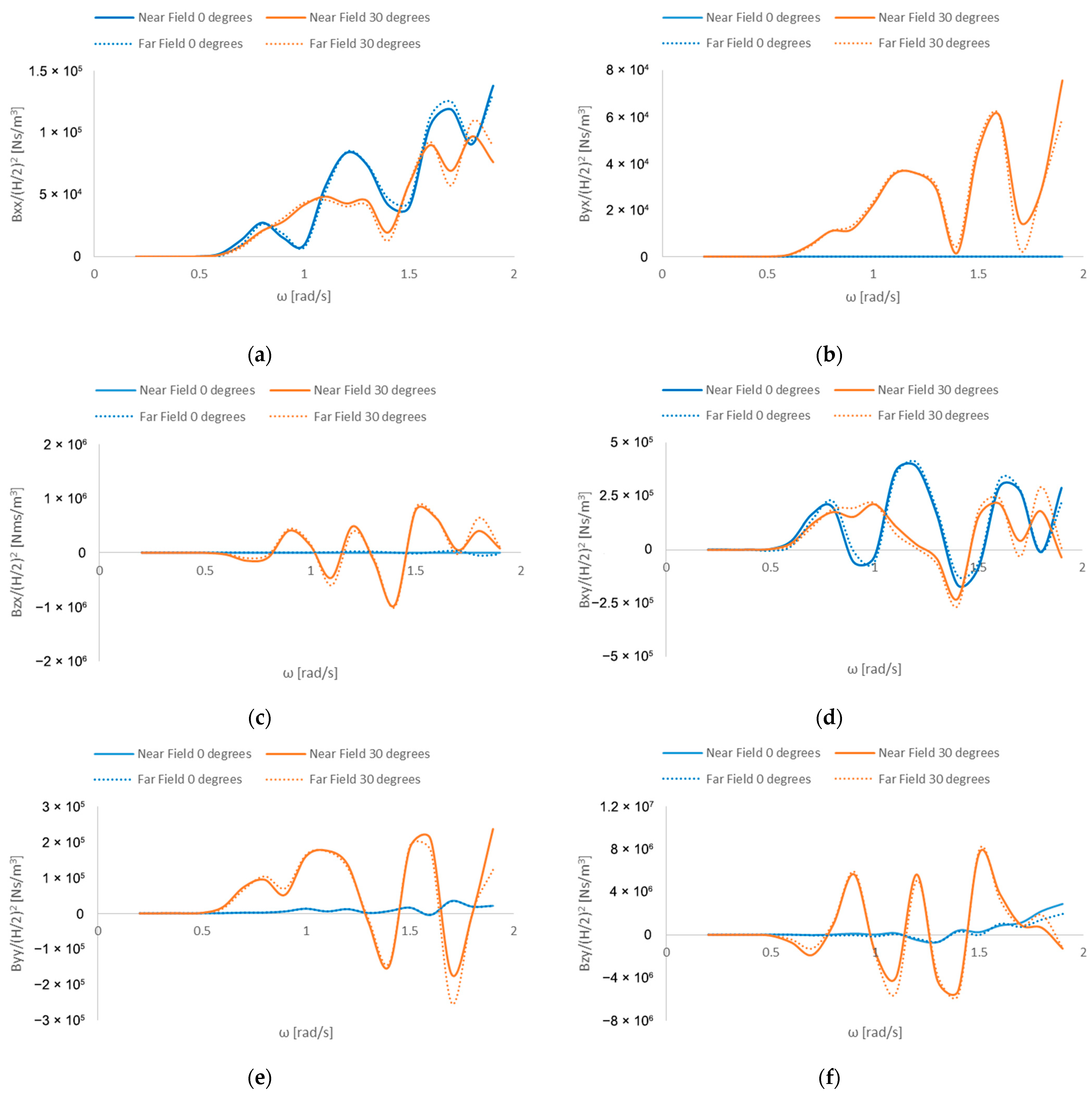
4.2.7. Wave-Drift Damping
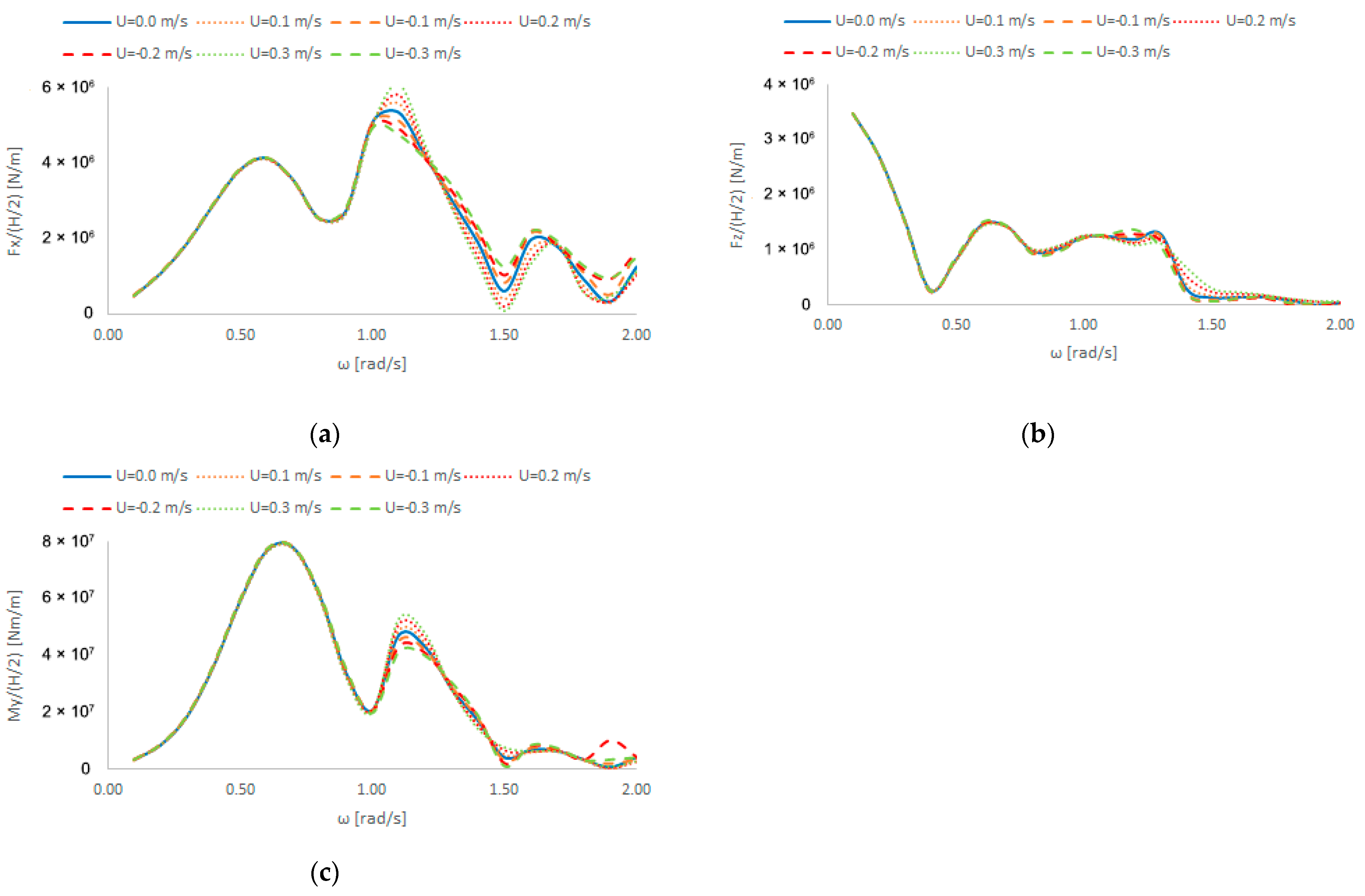
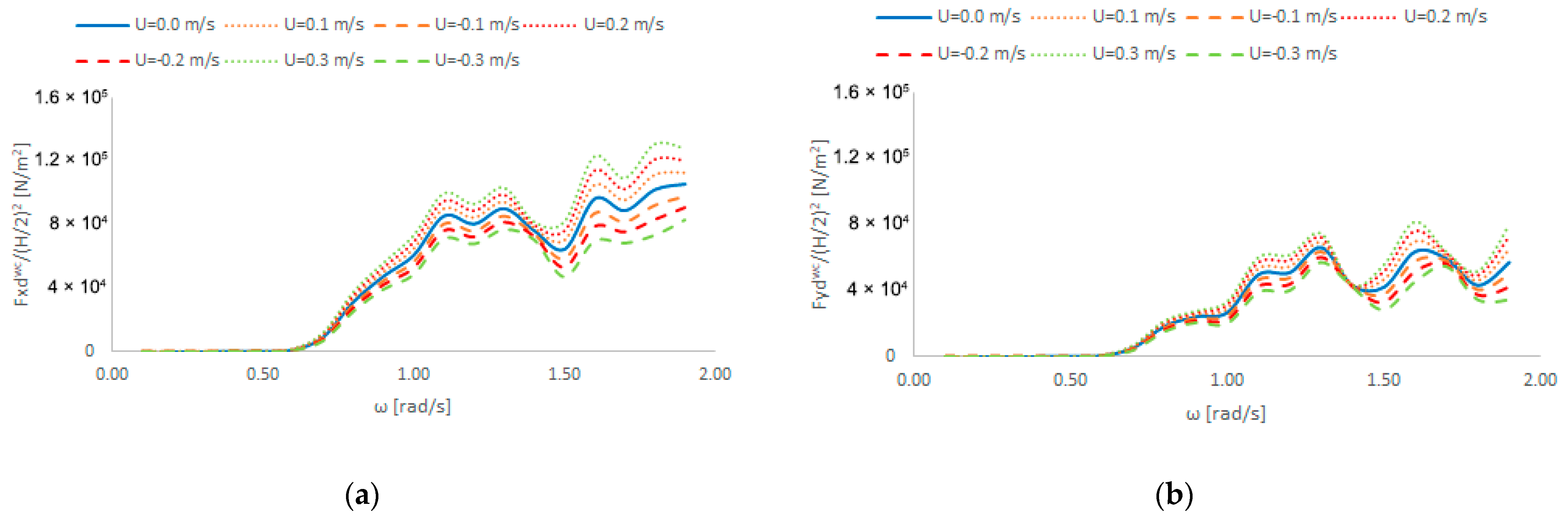
4.2.8. Mean Second-Order Drift Forces in Coexisting Wave and Current Fields: 0-Degree Wave and Current Headings
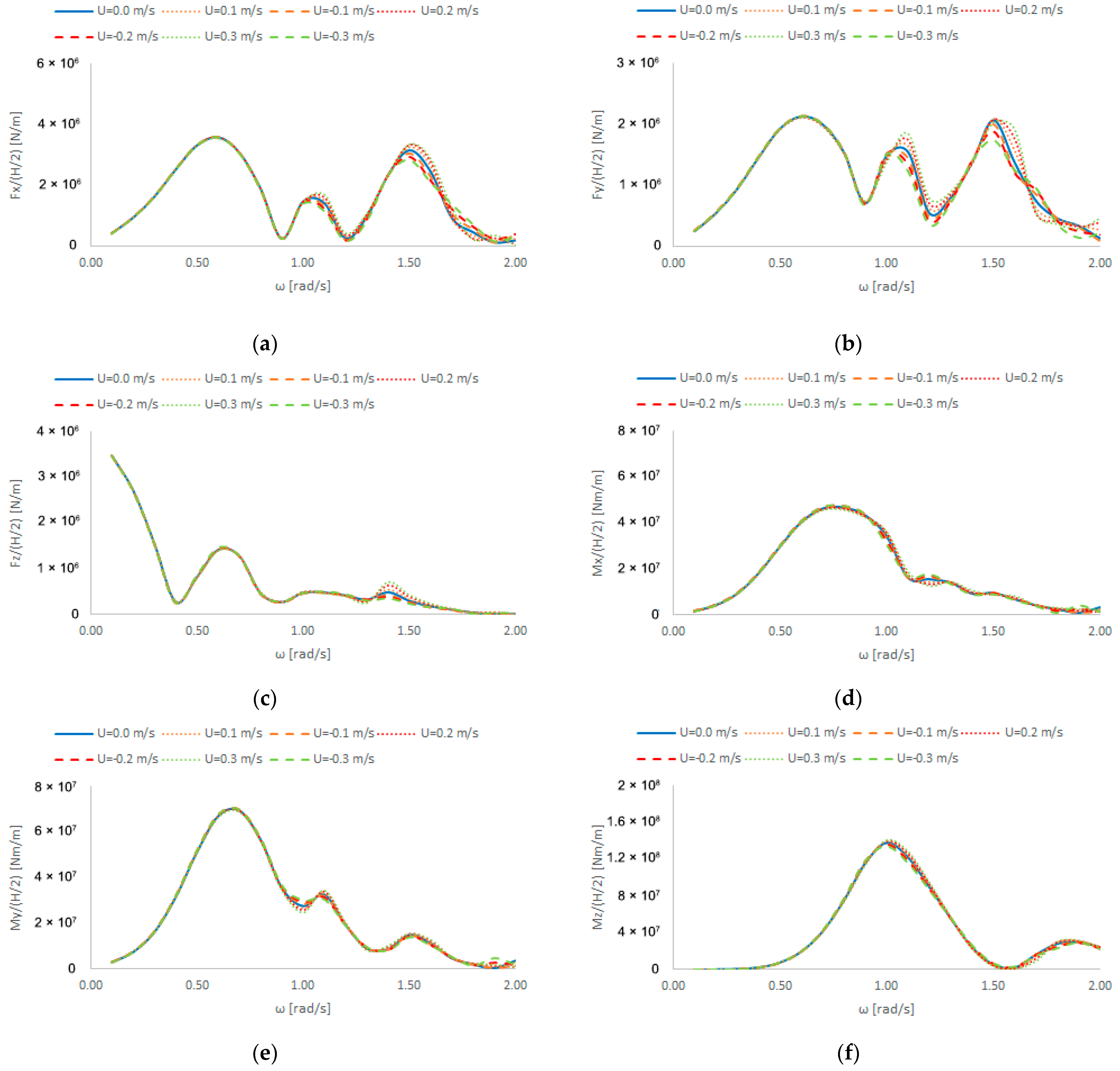
4.2.9. Mean Second-Order Drift Forces in Coexisting Wave and Current Fields: 30-Degree Wave and 0-Degree Current Headings
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Barooni, M.; Ashuri, T.; Sogut, D.V.; Stephen Wood, S.; Taleghani, S.G. Floating Offshore Wind Turbines: Current Status and Future Prospects. Energies 2023, 16, 2. [Google Scholar] [CrossRef]
- Jonkman, J. Definition of the Floating System for Phase IV of OC3; Technical Report; NREL/TP-500-47535; National Renewable Energy Lab (NREL): Golden, CO, USA, 2010.
- Shin, H. Model test of the OC3-Hywind floating offshore wind turbine. In Proceedings of the 21st International Offshore and Polar Engineering Conference (ISOPE2011), Maui, HI, USA, 19–24 June 2011. [Google Scholar]
- Browning, J.; Jonkman, J.; Robertson, A.; Goupee, A. Calibration and validation of a spar-type floating offshore wind turbine model using the FAST dynamic simulation tool. J. Phys. Conf. Ser. 2014, 555, 012015. [Google Scholar] [CrossRef]
- Robertson, A.N.; Jonkman, J.M.; Goupee, A.J.; Coulling, A.J.; Prowell, I.; Browning, J.; Masciola, M.D.; Molta, P. Summary of conclusions and recommendations drawn from the DeepCwind scaled floating offshore wind system test campaign. Int. Conf. Offshore Mech. Arct. Eng. Am. Soc. Mech. Eng. 2013, 55423, V008T09A053. [Google Scholar]
- Robertson, A.; Jonkman, J.; Masciola, M.; Song, H.; Goupee, A.; Coulling, A.; Luan, C. Definition of the Semisubmersible Floating System for Phase II of OC4; Technical Report; NREL/TP-5000-60601; National Renewable Energy Lab (NREL): Golden, CO, USA, 2014. Available online: https://www.nrel.gov/docs/fy14osti/60601.pdf (accessed on 1 July 2024).
- Benitz, M.A.; Schmidt, D.P.; Lackner, M.A.; Stewart, G.M.; Jonkman, J.; Robertson, A. Validation of hydrodynamic load models using CFD for the OC4-DeepCwind semisubmersible. In International Conference on Offshore Mechanics and Arctic Engineering; American Society of Mechanical Engineers: New York, NY, USA, 2015; Volume 56574, p. V009T09A037. [Google Scholar]
- Robertson, A.N.; Jonkman, J.M. Loads analysis of several offshore floating wind turbine concepts. In Proceedings of the 21st International Offshore and Polar Engineering Conference (ISOPE2011), Maui, HI, USA, 19–24 June 2011. [Google Scholar]
- Goupee, A.J.; Koo, B.; Lambrakos, K.; Kimball, R. Model tests for three floating wind turbine concepts. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 30 April–3 May 2012. [Google Scholar]
- Jaksic, V.; O’Shea, R.; Cahill, P.; Murphy, J.; Mandic, D.; Pakrashi, V. Dynamic response signatures of a scaled model platform for floating wind turbines in an ocean wave basin. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2015, 373, 20140078. [Google Scholar] [CrossRef]
- Jonkman, J.M. Dynamics Modeling and Loads Analysis of an Offshore Floating Wind Turbine; Technical Report; National Renewable Energy Lab (NREL): Golden, CO, USA, 2007.
- Oglivie, T.F. Second-order hydrodynamic effects on ocean platforms. In Proceedings of the International Workshop on Ship and Platform Motions, Berkeley, CA, USA, 26–28 October 1983; Yeung, R.W., Ed.; University of California: Berkeley, CA, USA, 1983; pp. 205–265. [Google Scholar]
- Newman, J. The second-order wave force on a vertical cylinder. J. Fluid Mech. 1996, 320, 417–443. [Google Scholar] [CrossRef]
- Roald, L.; Jonkman, J.; Robertson, A.; Chokani, N. The effect of second-order hydrodynamics on floating offshore wind turbines. Energy Procedia 2013, 35, 253–264. [Google Scholar] [CrossRef]
- Coulling, A.J.; Goupee, A.J.; Robertson, A.N.; Jonkman, J.M. Importance of second-order difference-frequency wave-diffraction forces in the validation of a fast semi-submersible floating wind turbine model. In International Conference on Offshore Mechanics and Arctic Engineering; American Society of Mechanical Engineers: New York, NY, USA, 2013; Volume 55423, p. V008T09A019. [Google Scholar]
- Zhang, L.; Shi, W.; Karimirad, M.; Michailides, C.; Jiang, Z. Second-order hydrodynamic effects on the response of three semisubmersible floating offshore wind turbines. Ocean Eng. 2020, 207, 107371. [Google Scholar] [CrossRef]
- Gueydon, S.; Jonkman, J. Update on the Comparison of Second-Order Loads on a Tension Leg Platform for Wind Turbines; Technical Report; National Renewable Energy Lab (NREL): Golden, CO, USA, 2016.
- Li, Y.; Tang, Y.; Zhu, Q.; Qu, X.; Wang, B.; Zhang, R. Effects of second-order wave forces and aerodynamic forces on dynamic responses of a TLP-type floating offshore wind turbine considering the set-down motion. J. Renew. Sustain. Energy 2017, 9, 063302. [Google Scholar] [CrossRef]
- Newman, J.N. Second-order, slowly varying forces on vessels in irregular waves. In Proceedings of the International Symposium on the Dynamics of Marine Vehicles and Structures in Waves, London, UK, 1–5 April 1974. [Google Scholar]
- Pinkster, J.A. Low-frequency phenomena associated with vessels moored at sea. Soc. Pet. Eng. J. 1975, 15, 487–494. [Google Scholar] [CrossRef]
- Mavrakos, S.A. Mean drift loads on multiple vertical axisymmetric bodies in regular waves. In Proceedings of the 5th International offshore and Polar Engineering Conference, The Hague, The Netherlands, 11–16 June 1995; International Society of Offshore and Polar Engineers: Cupertino, CA, USA, 1995; Volume III, pp. 547–555. [Google Scholar]
- Zhao, R.; Faltinsen, O.M. Interaction between current, waves, and marine structures. In Proceedings of the 5th International Conference on Numerical Ship Hydrodynamics, Hiroshima, Japan, 24–28 September 1989; National Academy Press: Washington, DC, 1990; pp. 87–99. [Google Scholar]
- Faltinsen, O.M. Wave and current-induced motions of floating production systems. Appl. Ocean Res 1994, 15, 351–370. [Google Scholar] [CrossRef]
- Molin, B. Second-order hydrodynamics applied to moored structure—A state-of-the-art survey. Ship Technol. Res. 1994, 41, 59–84. [Google Scholar]
- Mazarakos, T.P. Second-order wave loading and wave drift damping on floating marine structures. Ph.D. Thesis, School of Naval Architecture and Marine Engineering, Division of Marine Structures, Laboratory of Floating Structures and Mooring Systems, National Technical University of Athens, Athens, Greece, 2010; pp. 1–272. [Google Scholar]
- Zheng, Z.; Chen, J.; Liang, H.; Zhao, Y.; Shao, Y. Hydrodynamic Responses of a 6 MW Spar-Type Floating Offshore Wind Turbine in Regular Waves and Uniform Current. Fluids 2020, 5, 187. [Google Scholar] [CrossRef]
- Magkouris, A.; Belibassakis, K. A Novel BEM–FEM Scheme for the Interaction of Water Waves with Multiple Vertical Cylinders in the Presence of Currents. Fluids 2022, 7, 378. [Google Scholar] [CrossRef]
- Emmerhoff, O.J.; Sclavounos, P.D. The slow drift motion of arrays of vertical cylinders. J. Fluid Mech. 1992, 242, 31–50. [Google Scholar] [CrossRef]
- Nossen, J.; Grue, J.; Palm, E. Wave forces on three-dimensional floating bodies with small forward speed. J. Fluid Mech. 1991, 227, 135–160. [Google Scholar] [CrossRef]
- Grue, J.; Palm, E. The mean drift force and yaw moment on marine structures in waves and current. J. Fluid Mech. 1993, 250, 121–142. [Google Scholar] [CrossRef]
- Grue, J.; Biberg, D. Wave forces on marine structures with small speed in water of restricted depth. Appl. Ocean Res. 1993, 15, 121–135. [Google Scholar] [CrossRef]
- Chen, X.B.; Malenica, S. Uniformly valid solution of the wave-current-body interaction problem. In Proceedings of the 11th International Workshop on Water Waves and Floating Bodies, Hamburg, Germany, 17–20 March 1996; pp. 149–152. Available online: www.iwwwfb.org (accessed on 1 July 2024).
- Maruo, H. The drift of a body floating in waves. J. Ship Res. 1960, 4, 1–10. [Google Scholar]
- Newman, J.N. The drift force and moment on ships in waves. J. Ship Res. 1967, 11, 51–60. [Google Scholar] [CrossRef]
- Pinkster, J.A.; van Oortmerssen, G. Computation of the first- and second-order wave forces on oscillating bodies in regular waves. In Proceedings of the 2nd International Conference on Numerical Ship Hydrodynamics, Berkley, CA, USA; 1977; pp. 136–156. [Google Scholar]
- Clark, P.J.; Malenica, S.; Molin, B. An heuristic approach to wave drift damping. Appl. Ocean Res. 1993, 15, 53–55. [Google Scholar] [CrossRef]
- Aranha, J.A.P. A formula for the wave damping in the drift of a floating body. J. Fluid Mech. 1994, 275, 147–155. [Google Scholar] [CrossRef]
- Malenica, S.; Clark, P.J.; Molin, B. Wave and current forces on a vertical cylinder free to surge and sway. Appl. Ocean Res. 1995, 17, 79–90. [Google Scholar] [CrossRef]
- Hermans, A.J.; Sierevogel, L.M. A discussion on the second-order wave forces and wave drift damping. Appl. Ocean Res. 1996, 18, 257–263. [Google Scholar] [CrossRef]
- Martin, A.J.; Easson, W.J. Nonlinear internal wave kinematics. In Proceedings of the 7th International Offshore and Polar Engineering Conference (ISOPE 1997), Honolulu, HI, USA, 25–30 May 1997; Volume III, pp. 122–129. [Google Scholar]
- Trassoudaine, D.; Naciri, M. A comparison of a heuristic wave-drift damping formula with experimental results. Appl. Ocean Res. 1999, 21, 93–97. [Google Scholar] [CrossRef]
- Newman, J.N. Wave-drift damping of floating bodies. J. Fluid Mech. 1993, 249, 241–259. [Google Scholar] [CrossRef]
- Mavrakos, S.A.; Chatjigeorgiou, I.K.; Mazarakos, T.P.; Thanos, I. Second-order wave drift damping in hydrodynamically interacting large bodies. In Proceedings of the 17th International Offshore and Polar Engineering Conference, Lisbon, Portugal, 1–6 July 2007; International Society of Offshore and Polar Engineers: Cupertino, CA, USA, 2007; pp. 2142–2149. [Google Scholar]
- Mazarakos, T.P.; Mavrakos, S.A. Wave-current interaction on a vertical truncated cylinder floating in finite-depth waters. Proc. Inst. Mech. Eng.Part M J. Eng. Marit. Environ. 2013, 227, 243–255. [Google Scholar] [CrossRef]
- Chen, L.; Basu, B. Wave-current interaction effects on structural responses of floating offshore wind turbines. Wind Energy 2019, 22, 327–339. [Google Scholar] [CrossRef]
- Zhang, X.; Simons, R.; Zheng, J.; Zhang, C. A review of the state of research on wave-current interaction in nearshore areas. Ocean Eng. 2022, 243, 110202. [Google Scholar] [CrossRef]
- Elobeid, M.; Pillai, A.C.; Tao, L.; Ingram, D.; Hanssen, J.E.; Mayorga, P. Implications of wave-current interaction on the dynamic responses of a floating offshore wind turbine. Ocean Eng. 2024, 292, 116571. [Google Scholar] [CrossRef]
- Mavrakos, S.A.; Koumoutsakos, P. Hydrodynamic interaction among vertical axisymmetric bodies restrained in waves. Appl. Ocean Res. 1987, 9, 128–140. [Google Scholar] [CrossRef]
- Mavrakos, S.A. Hydrodynamic coefficients for groups of interacting vertical axisymmetric bodies. Ocean Eng. 1991, 18, 485–515. [Google Scholar] [CrossRef]
- Kokkinowrachos, K.; Mavrakos, S.A.; Asorakos, S. Behavior of vertical bodies of revolution in waves. Ocean Eng. 1986, 13, 505–538. [Google Scholar] [CrossRef]
- Bardis, L.; Mavrakos, S.A. Hydrodynamic analysis of large offshore units. In Proceedings of the 3rd IMAEM International Congress on Marine Technology, Athens, Greece, 28 May–1 June 1984; pp. 505–513. [Google Scholar]
- Wehausen, J.V.; Laitone, E.V. Surface waves. In Encyclopedia of Physics; Springer: Berlin/Heidelberg, Germany, 1960; Volume 9. [Google Scholar]
- ANSYS. Aqwa User Manual; Release 2022 R1; ANSYS, Inc.: Canonsburg, PA, USA, 2022. [Google Scholar]
- El-Geziry, T.M.; Bryden, I.G. The circulation pattern in the Mediterranean Sea: Issues for modeller consideration. J. Oper. Oceanogr. 2010, 3, 39–46. [Google Scholar] [CrossRef]
- Martínez, J.; García-Ladona, E.; Ballabrera-Poy, J.; Isern-Fontanet, J.; González-Motos, S.; Allegue, J.M.; González-Haro, C. Atlas of surface currents in the Mediterranean and Canary-Iberian-Biscay waters. J. Oper. Oceanogr. 2024, 17, 40–62. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mazarakos, T.P.; Mavrakos, S.A. Wave-Current Interaction Effects on the OC4 DeepCwind Semi-Submersible Floating Offshore Wind Turbine. J. Mar. Sci. Eng. 2024, 12, 1509. https://doi.org/10.3390/jmse12091509
Mazarakos TP, Mavrakos SA. Wave-Current Interaction Effects on the OC4 DeepCwind Semi-Submersible Floating Offshore Wind Turbine. Journal of Marine Science and Engineering. 2024; 12(9):1509. https://doi.org/10.3390/jmse12091509
Chicago/Turabian StyleMazarakos, Thomas P., and Spyridon A. Mavrakos. 2024. "Wave-Current Interaction Effects on the OC4 DeepCwind Semi-Submersible Floating Offshore Wind Turbine" Journal of Marine Science and Engineering 12, no. 9: 1509. https://doi.org/10.3390/jmse12091509
APA StyleMazarakos, T. P., & Mavrakos, S. A. (2024). Wave-Current Interaction Effects on the OC4 DeepCwind Semi-Submersible Floating Offshore Wind Turbine. Journal of Marine Science and Engineering, 12(9), 1509. https://doi.org/10.3390/jmse12091509