
In Situ Measurement of Deep-Sea Salinity Using Optical Salinometer Based on Michelson Interferometer

 , , , , , and
, , , , , and
Abstract
:1. Introduction
2. Design and Simulations of the MI Probe
2.1. Design of the MI Probe
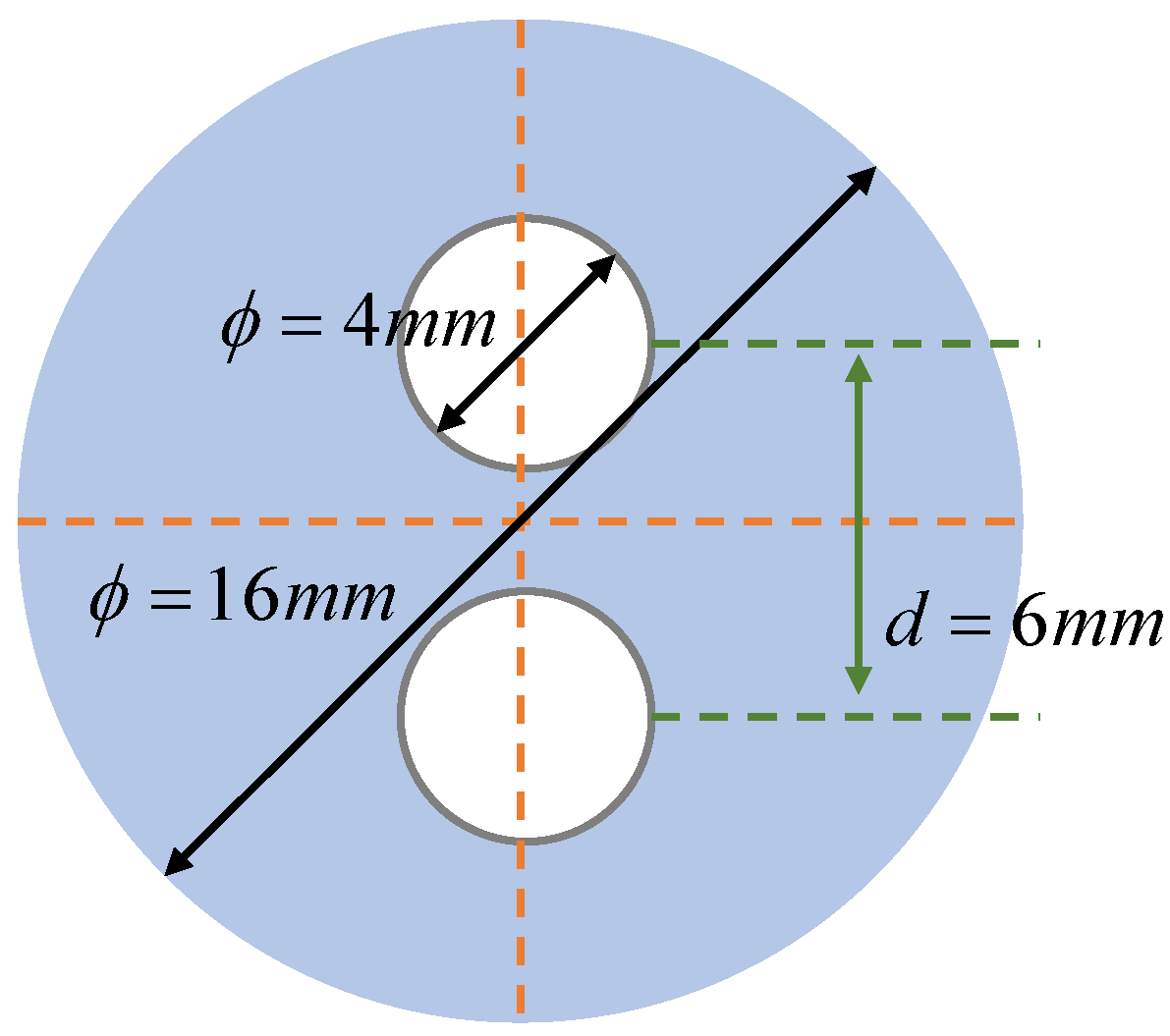
2.2. Deformation Simulations of Sapphire Window in Deep Sea
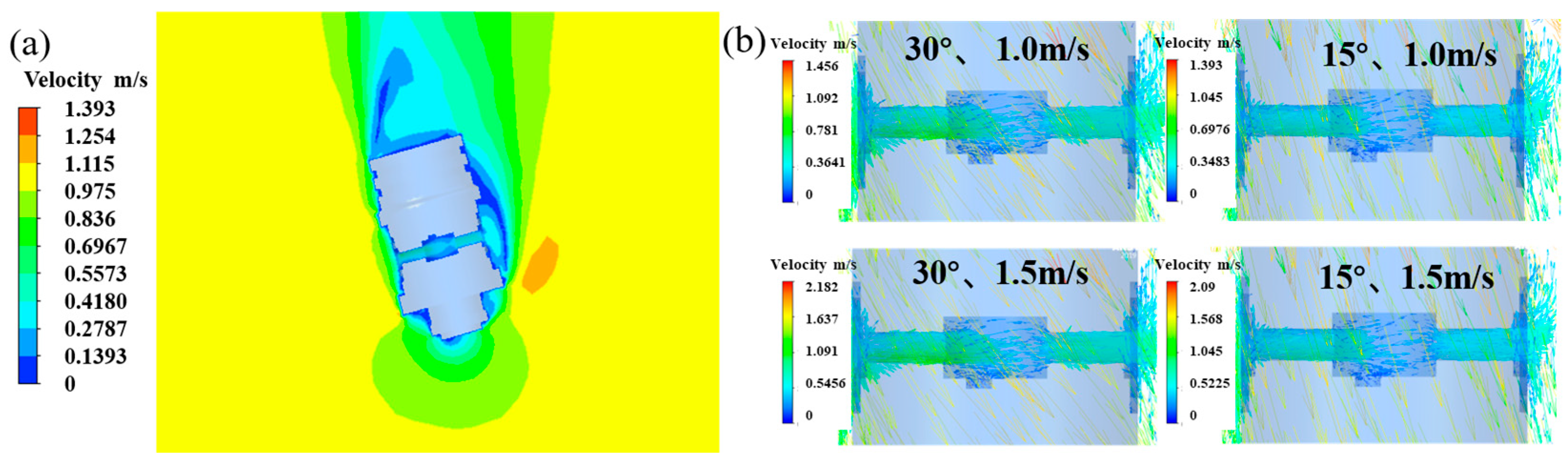
2.3. Simulation of Seawater Flow during Descent Profile
3. FMCW System and Calibration of Mathematical Models
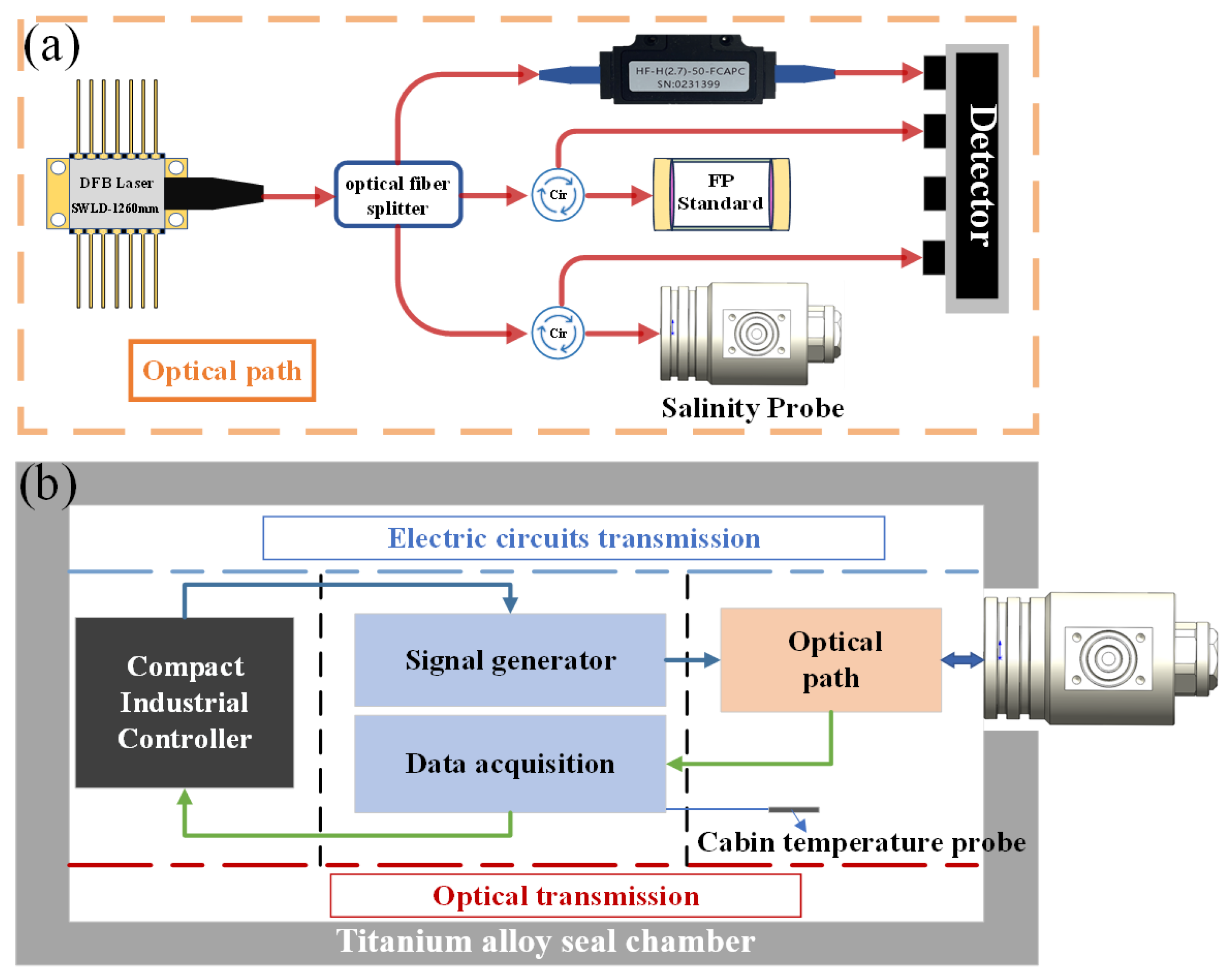
3.1. FMCW System
3.2. Sea Trial Equipment and Mathematical Models
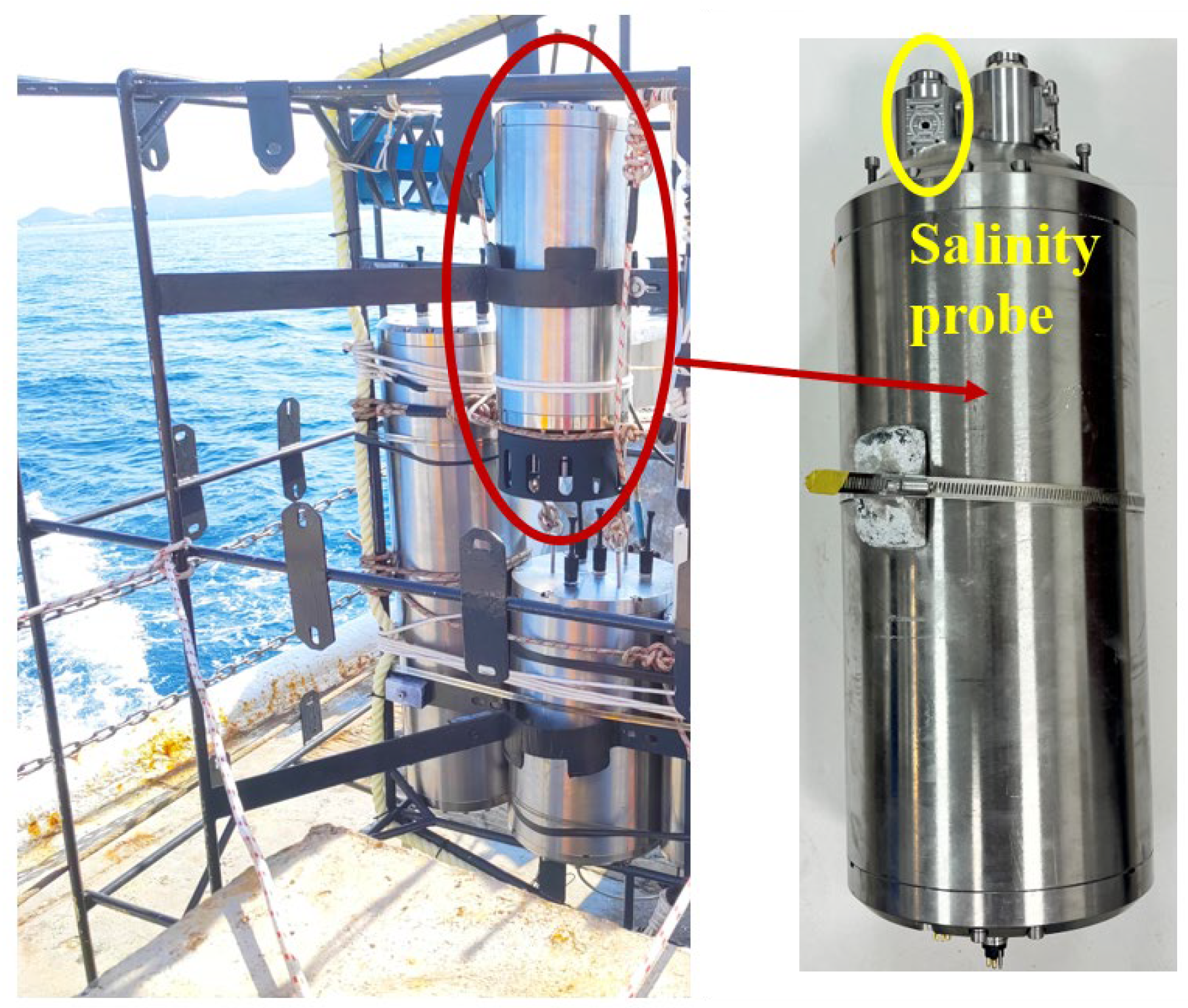
3.2.1. Sea Trial Equipment
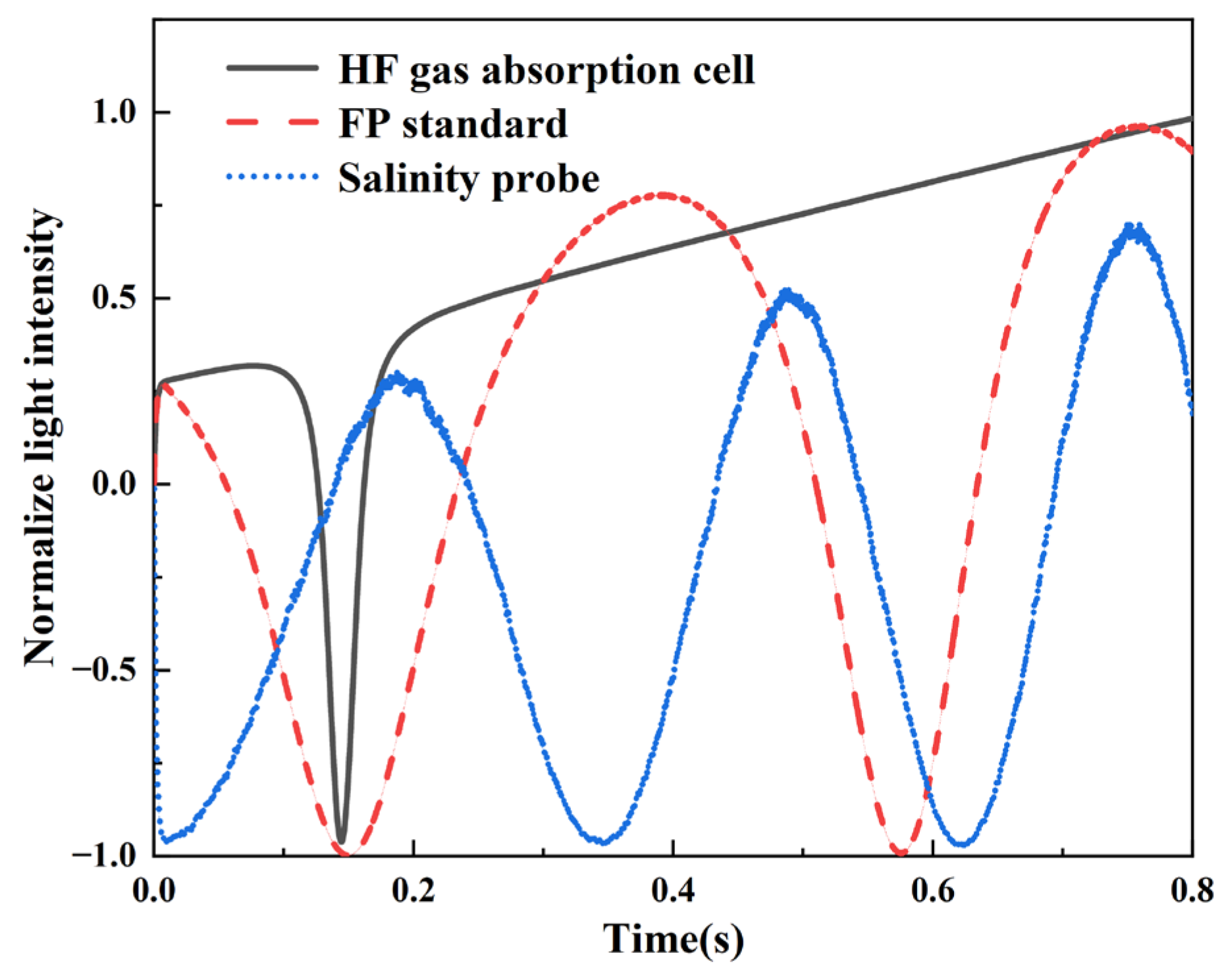
3.2.2. Mathematical Models
4. Experiment Results and Discussion
4.1. In Situ Sensing Ability of Salinity in Profiles
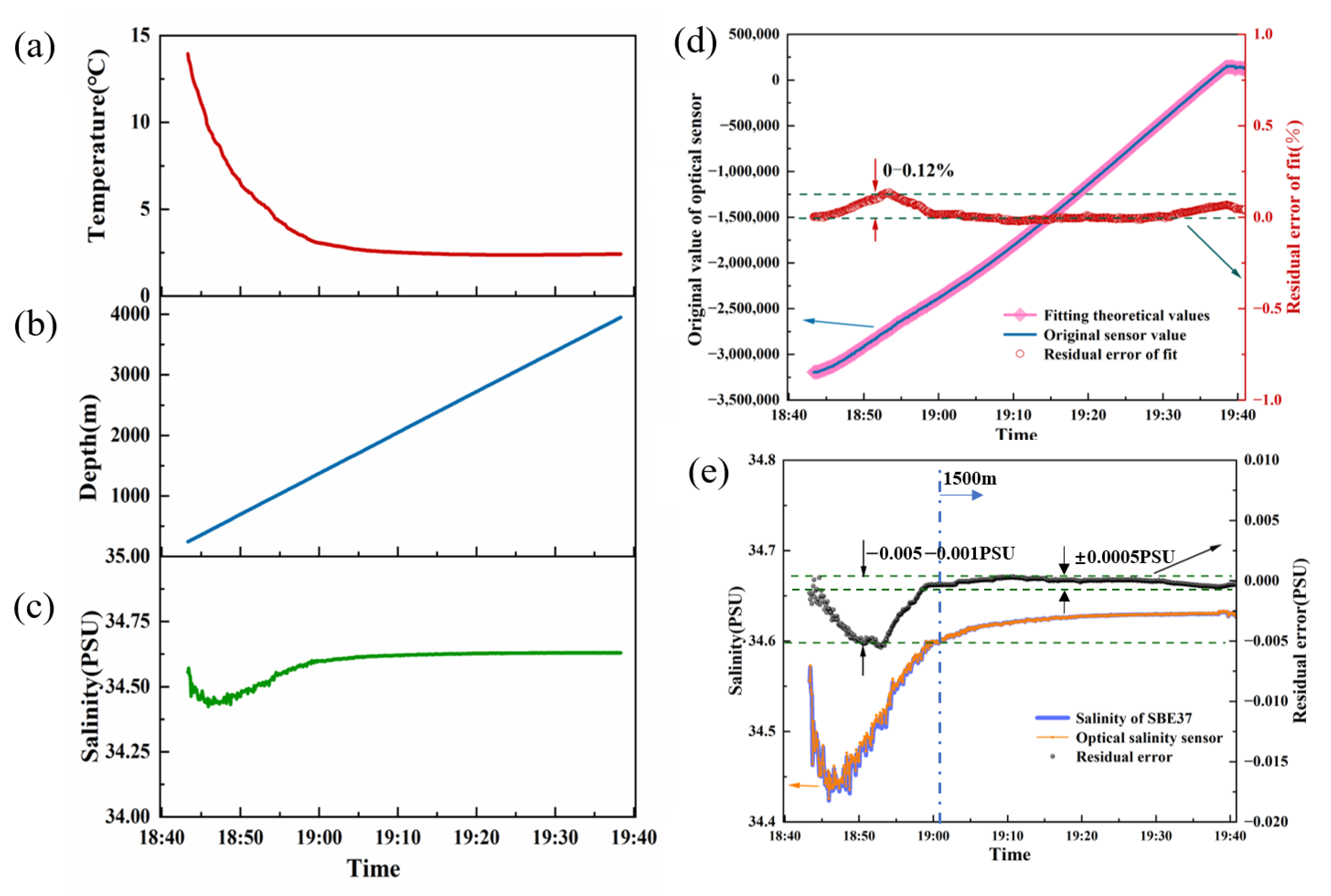
4.2. In Situ Deep-Sea Salinity Sensing
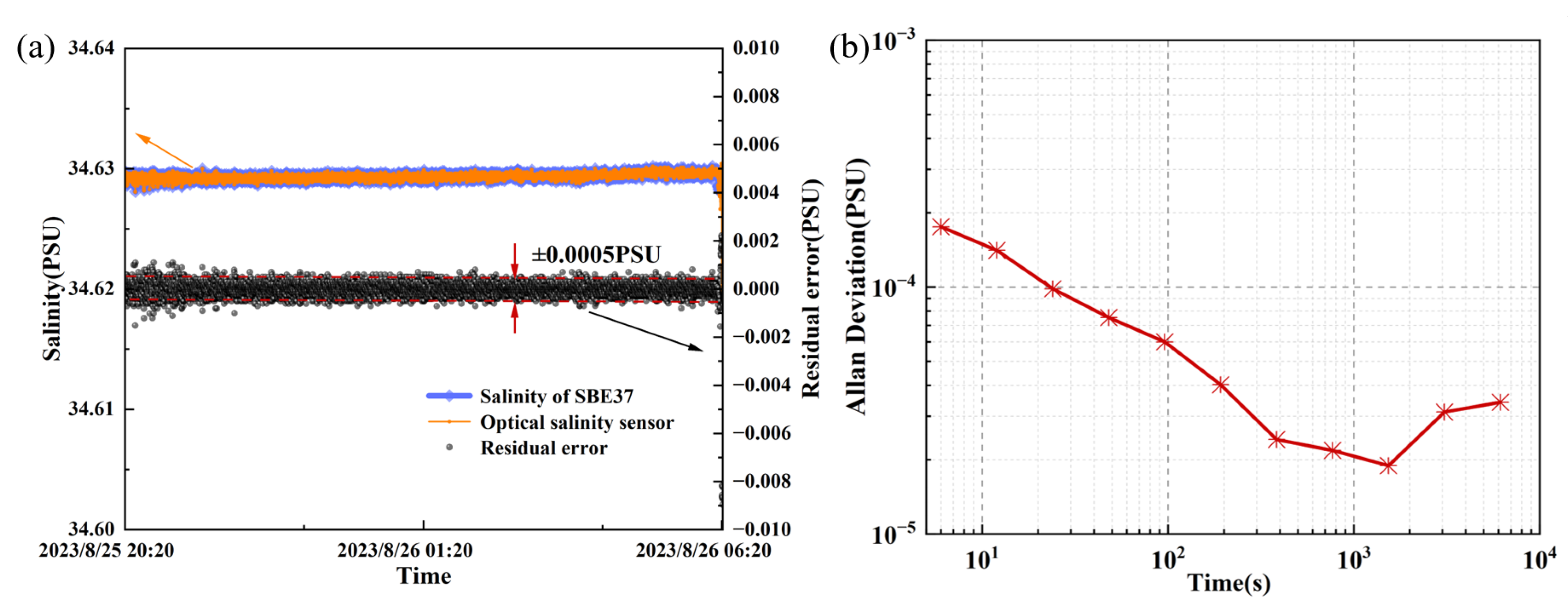
4.3. In Situ Long-Term Salinity Sensing
4.4. Comparison and Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gu, L.; He, X.; Zhang, M.; Lu, H. Advances in the technologies for marine salinity measurement. J. Mar. Sci. Eng. 2024, 10, 2024. [Google Scholar] [CrossRef]
- Li, G.; Cheng, L.; Zhu, J.; Trenberth, K.E.; Mann, M.E.; Abraham, J.P. Increasing ocean stratification over the past half-century. Nat. Clim. Change 2020, 10, 1116–1123. [Google Scholar] [CrossRef]
- Evans, T.G.; Kültz, D. The cellular stress response in fish exposed to salinity fluctuations. J. Exp. Zool. Part A 2020, 333, 421–435. [Google Scholar] [CrossRef]
- Forch, C.; Knudson, M.; Sorensen, S. Reports on the determination of the constants for compilation of hydrographic tables. Det K. Dan. Vidensk. Selsk. Skrifter. Naturvidenskabelig Og Math. Afd. 1902, 6, 1–151. [Google Scholar]
- Lewis, E. The practical salinity scale 1978 and its antecedents. IEEE J. Ocean. Eng. 1980, 5, 3–8. [Google Scholar] [CrossRef]
- IOC; SCOR; IAPSO. The International Thermodynamic Equation of Seawater-2010: Calculation and Use of Thermodynamic Properties; Intergovernmental Oceanographic Commission: Paris, France, 2010. [Google Scholar]
- Millero, F.J.; Feistel, R.; Wright, D.G.; McDougall, T.J. The composition of standard seawater and the definition of the reference-composition salinity scale. Deep-Sea Res. Pt. I 2008, 55, 50–72. [Google Scholar] [CrossRef]
- Mcdougall, T.J.; Jackett, D.R.; Millero, F.J.; Pawlowicz, R.; Barker, P.M. A global algorithm for estimating Absolute Salinity. Ocean. Sci. 2012, 8, 1123–1134. [Google Scholar] [CrossRef]
- Zhang, C.; Xiao, Y.; Gao, W.; Fu, Y.; Zhou, Z.; Chen, S.; Su, J.; Wu, C.; Wu, A. Contribution of dissolved organic matter to seawater salinity measured by optic refractometer: A case study of DOM extracted from aoshan bay. Front. Mar. Sci. 2023, 10, 1142718. [Google Scholar] [CrossRef]
- Su, J.; Xiao, Y.; Chen, S.; Zhang, C.; Gao, W.; Fu, Y.; Bai, X.; Wu, C. Comparison of Salinity Measurement Based on Optical Refractometer and Electric Conductivity: A Case Study of Urea in Seawater. IEEE Sens. J. 2024, 24, 2172–2179. [Google Scholar] [CrossRef]
- Millard, R.C.; Seaver, G. An index of refraction algorithm for seawater over temperature, pressure, salinity, density, and wavelength. Deep-Sea Res. Pt. A 1990, 37, 1909–1926. [Google Scholar] [CrossRef]
- Wang, X.; Bai, X.; Zhang, M. Optical salinity sensing based on Michaelson interferometer under water pressure up to 11,500 meters. Ocean Eng. 2024, 299, 117307. [Google Scholar] [CrossRef]
- Uchida, H.; Kayukawa, Y.; Maeda, Y. Ultra high-resolution seawater density sensor based on a refractive index measurement using the spectroscopic interference method. Sci. Rep. 2019, 9, 15482. [Google Scholar] [CrossRef] [PubMed]
- Held, P.; Kegler, P.; Schrottke, K. Influence of suspended particulate matter on salinity measurements. Cont. Shelf Res. 2014, 85, 1–8. [Google Scholar] [CrossRef]
- Friedman, A.R.; Reverdin, G.; Khodri, M.; Gastineau, G. A new record of Atlantic sea surface salinity from 1896 to 2013 reveals the signatures of climate variability and long-term trends. Geophys. Res. Lett. 2017, 44, 1866–1876. [Google Scholar] [CrossRef]
- Tian, P.; Zhu, Z.; Wang, M.; Ye, P.; Yang, J.; Shi, J.; Yang, J.; Guan, C.; Yuan, L. Refractive Index Sensor Based on Fiber Bragg Grating in Hollow Suspended-Core Fiber. IEEE Sens. J. 2019, 19, 11961–11964. [Google Scholar] [CrossRef]
- Zhang, X.; Peng, W. Temperature-Independent Fiber Salinity Sensor Based on Fabry-Perot Interference. Opt. Express 2015, 23, 10353–10358. [Google Scholar] [CrossRef]
- Lin, Z.; Lv, R.; Zhao, Y.; Zheng, H.; Wang, X. High-Sensitivity Special Open-Cavity Mach-Zehnder Structure for Salinity Measurement Based on Etched Double-Side Hole Fiber. Opt. Lett. 2021, 46, 2714–2717. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhao, J.; Wang, X.; Peng, Y.; Hu, X. Femtosecond Laser-Inscribed Fiber-Optic Sensor for Seawater Salinity and Temperature Measurements. Sens. Actuators B Chem. 2022, 353, 131134. [Google Scholar] [CrossRef]
- Wang, X.; Wang, J.; Wang, S.; Liao, Y. Fiber-optic salinity sensing with a panda-microfiber-based multimode interferometer. J. Light. Technol. 2017, 35, 5086–5091. [Google Scholar] [CrossRef]
- Chen, J.; Guo, W.; Xia, M.; Li, W.; Yang, K. In situ measurement of seawater salinity with an optical refractometer based on total internal reflection method. Opt. Express 2018, 26, 25510–25523. [Google Scholar] [CrossRef]
- Malardé, D.; Wu, Z.Y.; Grosso, P.; de la Tocnaye, J.-L.d.B.; Le Menn, M. High-resolution and compact refractometer for salinity measurements. Meas. Sci. Technol. 2009, 20, 015204. [Google Scholar] [CrossRef]
- Menn, M.L.; de la Tocnaye, J.-L.d.B.; Grosso, P.; Delauney, L.; Podeur, C.; Brault, P.; Guillerme, O. Advances in measuring ocean salinity with an optical sensor. Meas. Sci. Technol. 2011, 22, 115202. [Google Scholar] [CrossRef]
- Li, G.; Li, G.; Yang, S.; Ji, L.; Sun, Q.; Su, J.; Wu, C. A novel salinity sensor with high-resolution and large dynamic range based on optical Fabry-Pérot cavity. Sens. Actuator A Phys. 2022, 347, 113970. [Google Scholar] [CrossRef]
- Li, G.; Yang, S.; Wu, C. Seeing more clearly: Improving the resolution of ocean salinity measurements using a Fabry-Perot resonant cavity. Opt. Laser Eng. 2024, 181, 108356. [Google Scholar] [CrossRef]
- Yang, S.; Ji, L.; Zhao, S.; Sun, Q.; Xu, J.; Wu, C. High-resolution Michelson Salinometer Based on Frequency-modulated Continuous-wave Interferometry. IEEE Sens. J. 2024. early access. [Google Scholar] [CrossRef]
- Ji, L.; Zhao, S.; Sun, Q.; Yang, S.; Bai, X.; Zhao, P.; Su, J.; Wu, C. Seawater Temperature Measurement System Based on Wavelength Sweeping and Cross Correlation Algorithm. IEEE Sens. J. 2023, 23, 9280–9286. [Google Scholar] [CrossRef]
- Ji, L.; Sun, Q.; Zhao, S.; Sun, Q.; Yang, S.; Bai, X.; Zhao, P.; Su, J.; Wu, C. High-resolution fiber grating pressure sensor with in-situ calibration for deep sea exploration. Opt. Express 2023, 31, 10358–10367. [Google Scholar] [CrossRef]
- Qu, T.D.; Mitsudera, H.; Yamagata, T. Intrusion of the North Pacific waters into the South China Sea. J. Geophys. Res.-Oceans 2000, 105, 6415–6424. [Google Scholar] [CrossRef]
- You, Y.Z.; Chern, C.S.; Yang, Y.; Liu, C.-T.; Liu, K.-K.; Pai, S.-C. The South China Sea, a cul-de-sac of North Pacific intermediate water. J. Oceanogr. 2005, 61, 509–527. [Google Scholar] [CrossRef]
- Quan, X.; Fry, E.S. Empirical equation for the index of refraction of seawater. Appl. Opt. 1995, 34, 3477–3480. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Capacity | Open-Circuit Voltage | Maximum Continuous Discharge Current | Operation Temperature | Size |
|---|---|---|---|---|
| 14,000 mAh | 3.66 V | 1800 mA | −55 ~ +80 °C | 34 × 62 mm |
| Salinity of SBE37/Psu | Salinity of the Sensor/Psu | Error/Psu | Percentage of Error | |
|---|---|---|---|---|
| First day | 34.6003 | 34.59947 | 8.35957 × 10−4 | 0.00242% |
| Last day | 34.600013 | 34.59936 | 7.6885 × 10−4 | 0.00222% |
| Sensing Principle | Core Component | Resolution /Psu | Advantages and Disadvantages |
|---|---|---|---|
| Electrical conductivity [SBE37] | Conductivity cell | 0.002 | Broadly applied in ocean observation, but ignores non-conductive substances in seawater |
| Total internal reflection [21] | CCD | 0.05 | Compact structure, but only suitable for surface seawater measurement with low resolution |
| V-block refraction [22] | PSD | 0.001 | Simple structure and small size, but not suitable for deep sea |
| Optical interferometer [13] | Thickness meter | 0.00015 | High resolution, but complex demodulation system, lack of structural stability in deep sea |
| Michelson interferometer | FMCW | 0.0000189 | High resolution, simple modulation system, long-term stability in deep sea |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, S.; Xu, J.; Ji, L.; Sun, Q.; Zhang, M.; Zhao, S.; Wu, C. In Situ Measurement of Deep-Sea Salinity Using Optical Salinometer Based on Michelson Interferometer. J. Mar. Sci. Eng. 2024, 12, 1569. https://doi.org/10.3390/jmse12091569
Yang S, Xu J, Ji L, Sun Q, Zhang M, Zhao S, Wu C. In Situ Measurement of Deep-Sea Salinity Using Optical Salinometer Based on Michelson Interferometer. Journal of Marine Science and Engineering. 2024; 12(9):1569. https://doi.org/10.3390/jmse12091569
Chicago/Turabian StyleYang, Shuqing, Jie Xu, Lanting Ji, Qingquan Sun, Muzi Zhang, Shanshan Zhao, and Chi Wu. 2024. "In Situ Measurement of Deep-Sea Salinity Using Optical Salinometer Based on Michelson Interferometer" Journal of Marine Science and Engineering 12, no. 9: 1569. https://doi.org/10.3390/jmse12091569