
Exploring Innovative Methods in Maritime Simulation: A Ship Path Planning System Utilizing Virtual Reality and Numerical Simulation



Abstract
:1. Introduction
2. Framework of the Ship Virtual Path Planning Simulation Test System
2.1. Requirements Analysis and System Functionality Specifications
- During the operation of the virtual system, the scene rendering should remain smooth and clear. Under high-load conditions, such as full-screen water rendering, advanced reflections, and ambient occlusion effects, the GPU utilization is expected to stabilize around 70–90%; average CPU utilization should remain below 15%, with single-core CPU usage for AI logic computations maintained at 60%. The average frame rate should exceed 60 fps. Even during extensive ocean rendering and island interactions, the system should maintain a fluid experience, with no lag observed during interactions;
- The virtual simulation system is equipped with data communication capabilities, allowing for the mapping of simulation data. The data latency is less than one second, ensuring smooth and stable data flow with no significant fluctuations;
- Ensure that the numerical simulation module possesses the capability to save simulation data in real time.
- The path planning simulation within the system can evaluate the optimization effects of the algorithm by comparing path length, computation time, and ship navigation posture data.
2.2. Design Framework of the Ship Virtual Path Planning Simulation Test System
3. Construction of the Virtual Simulation System
3.1. Design of the Numerical Simulation Module
3.1.1. Route Optimization Constraint Model
3.1.2. Rapid Ship Roll Calculation Model
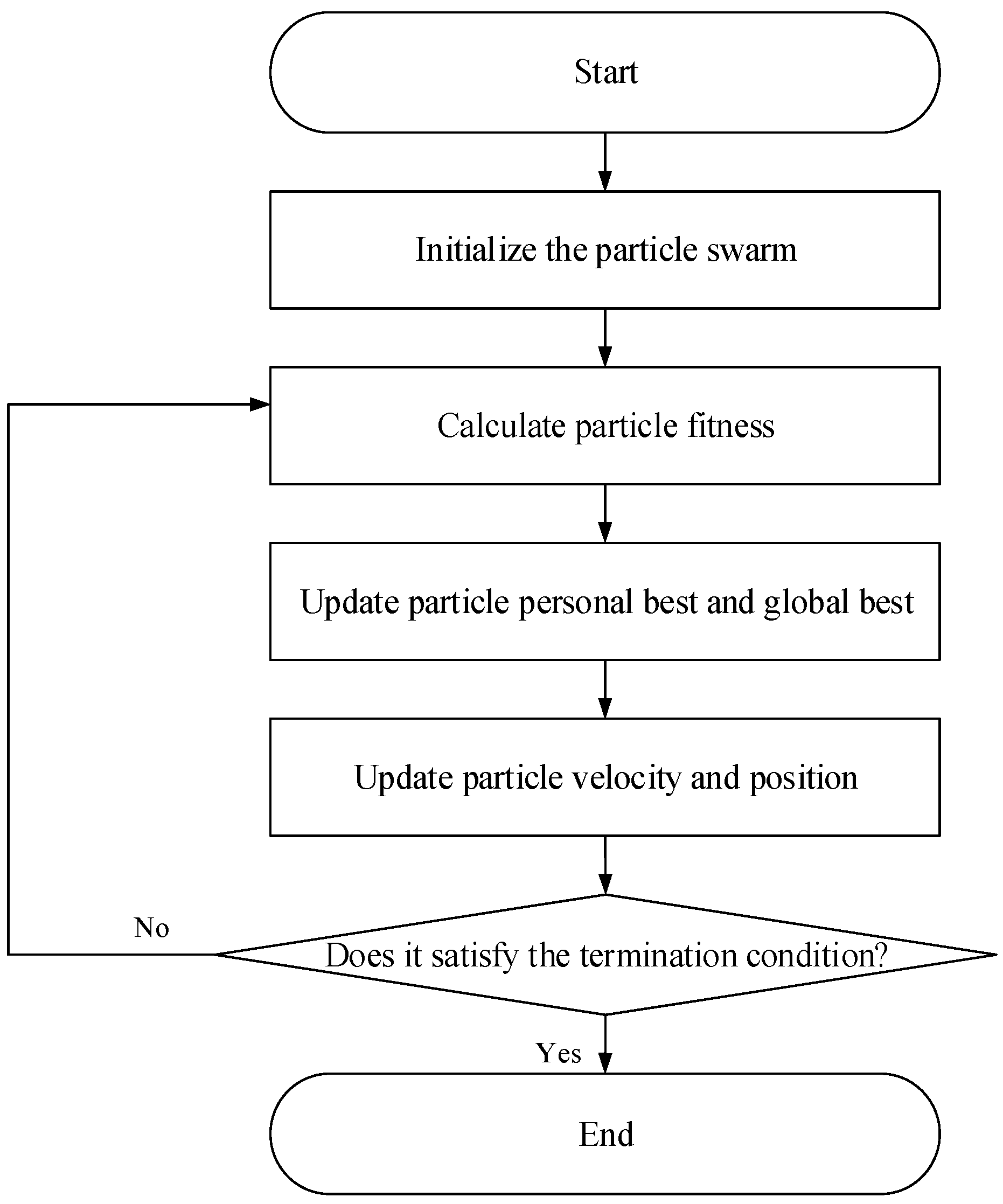
3.1.3. Global Path Planning Based on the PSO Algorithm
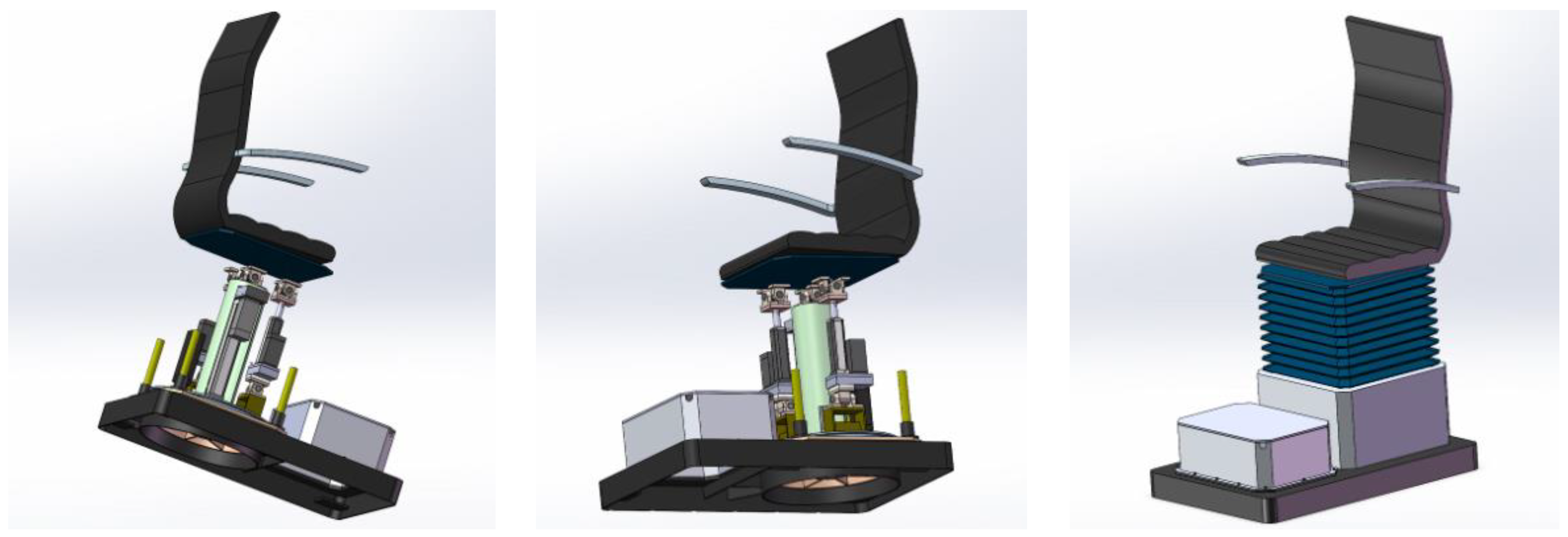
3.2. Design of the Physical Simulation Module
3.3. Design of the Virtual Simulation Platform
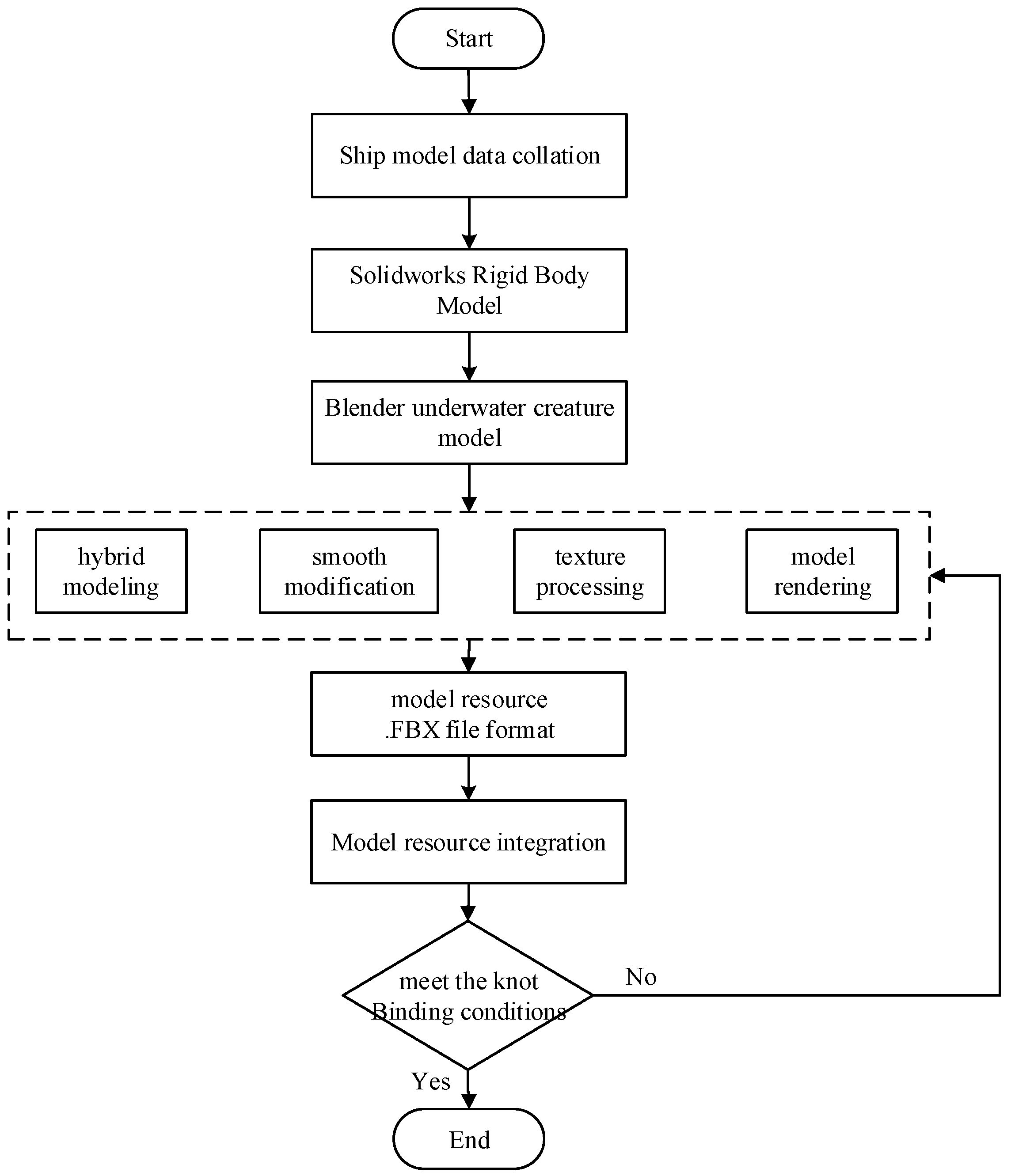
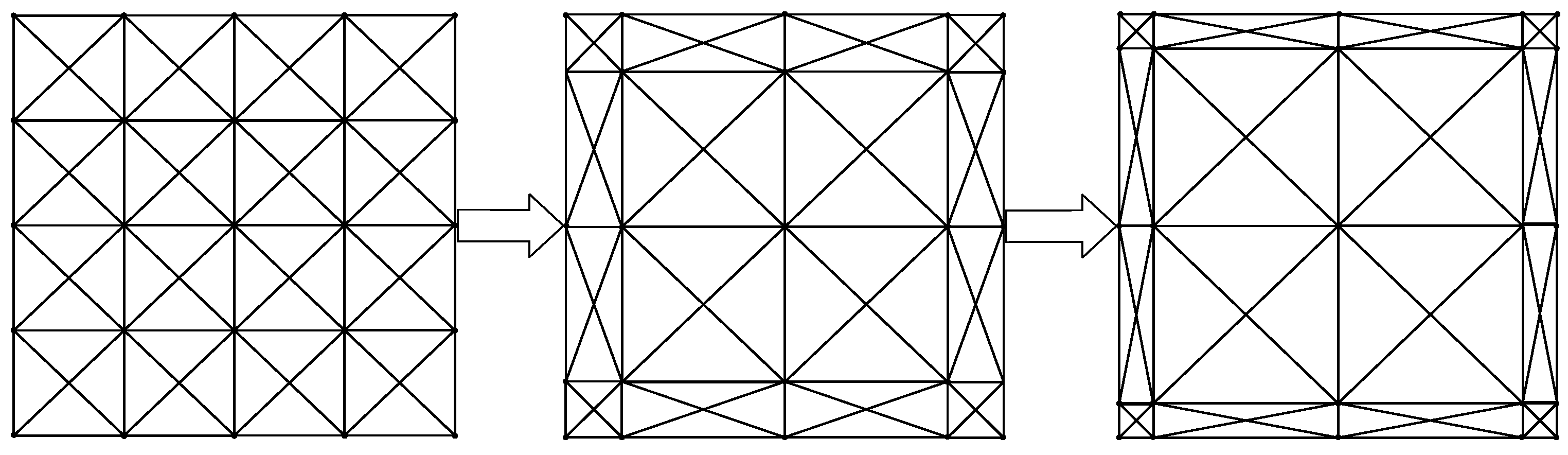
3.3.1. Construction of the Three-Dimensional Virtual Ship Model
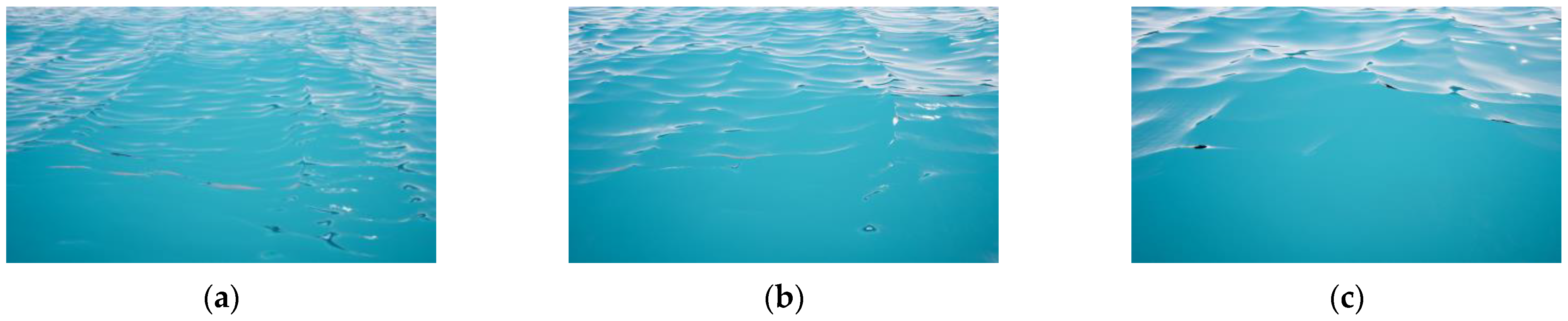
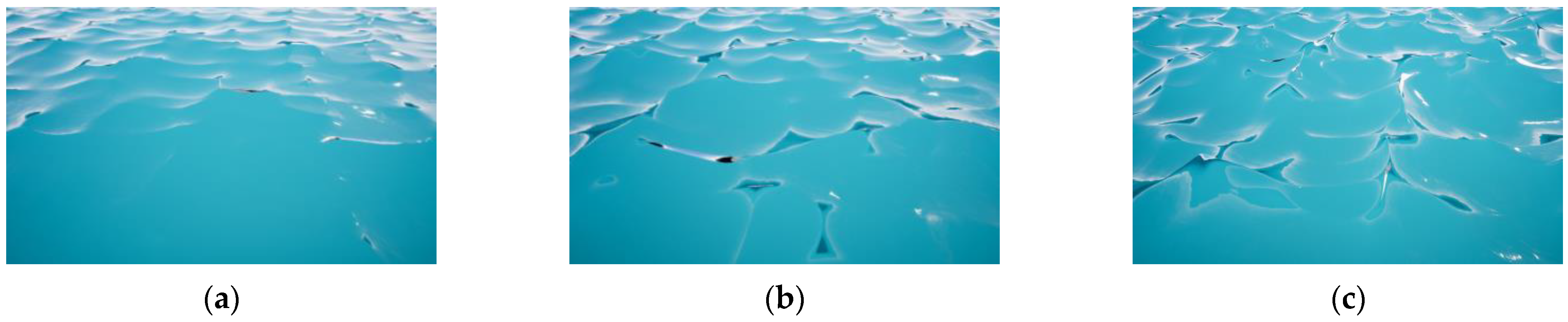
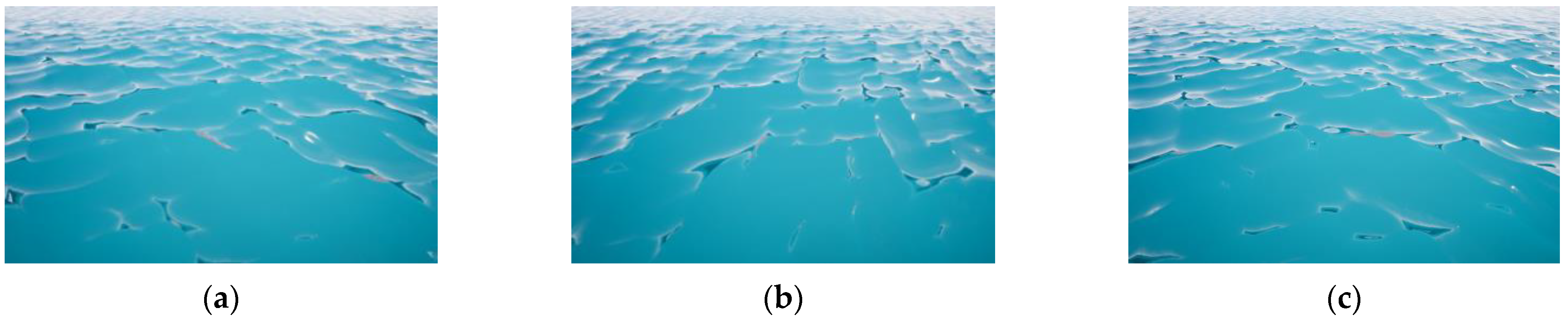
3.3.2. Construction of the Virtual Ocean Environment
4. Results and Analysis
4.1. Numerical Computation Platform Testing and Validation
4.1.1. Preparation of Roll Data
- The range of wave direction is from 0° to 360°, with values taken at every 30°, resulting in 12 sampling points.;
- The wave height ranges from 0.5 m to 5 m, with values taken at every 0.5 m, resulting in 10 sampling points;
- The wind direction ranges from 0° to 360°, with values taken at every 45°, resulting in 8 sampling points;
- The wind speed ranges from 2 m/s to 12 m/s, with values taken at every 1 m/s, resulting in 10 sampling points.
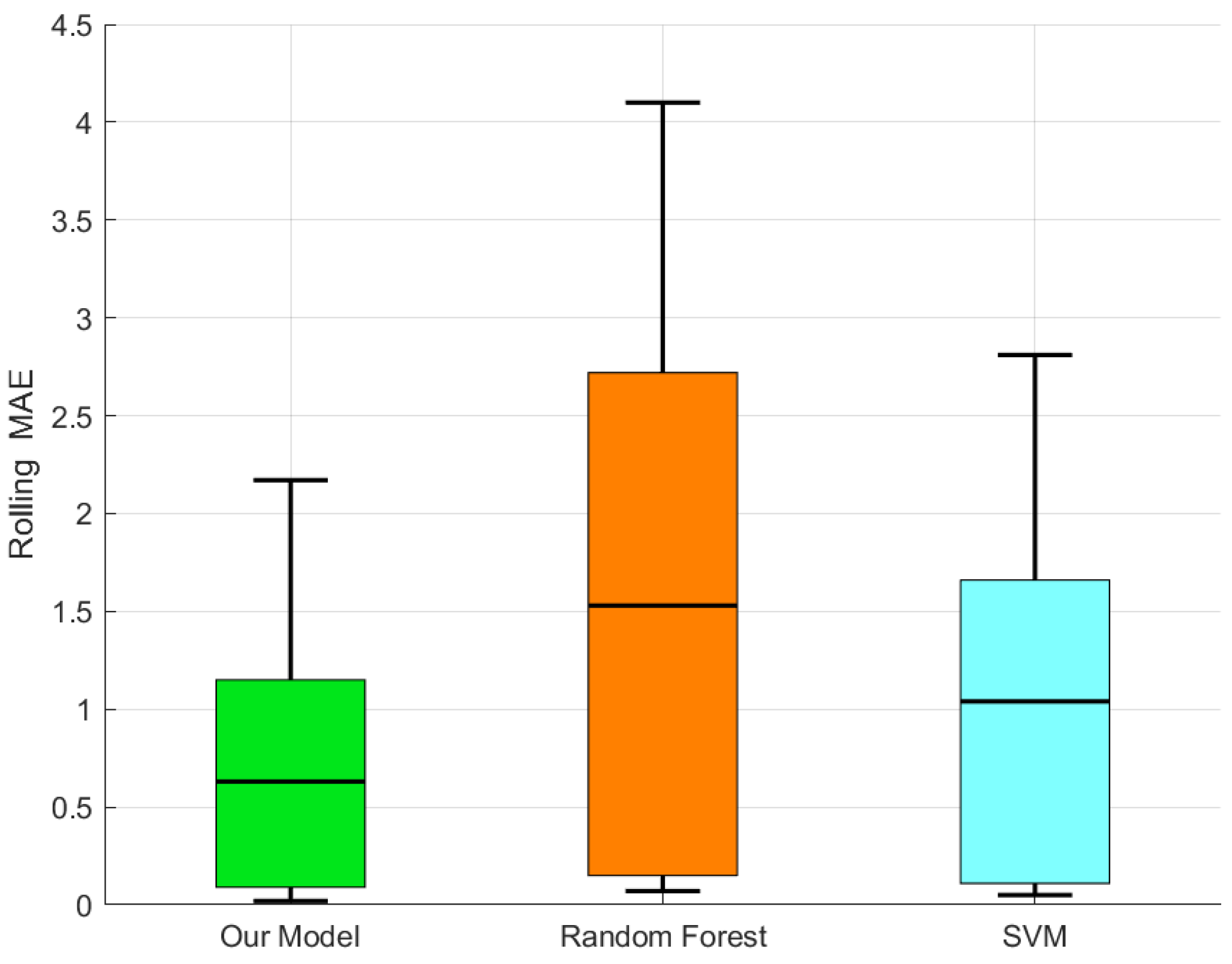
4.1.2. Testing and Analysis of Rapid Roll Motion Calculation for Ships
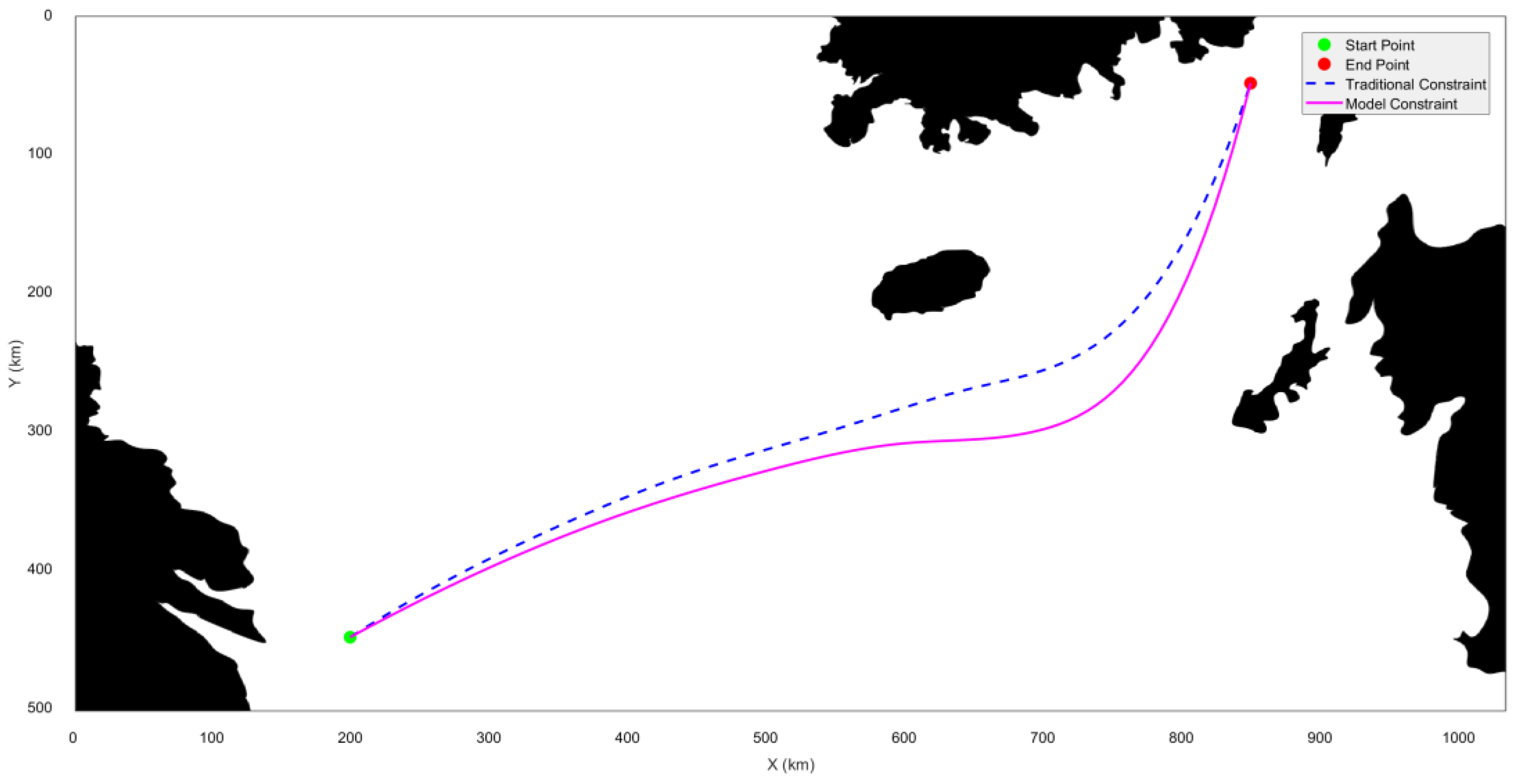
4.1.3. Verification of Ship Route Optimization Planning
4.2. Validation of the Virtual Simulation Platform
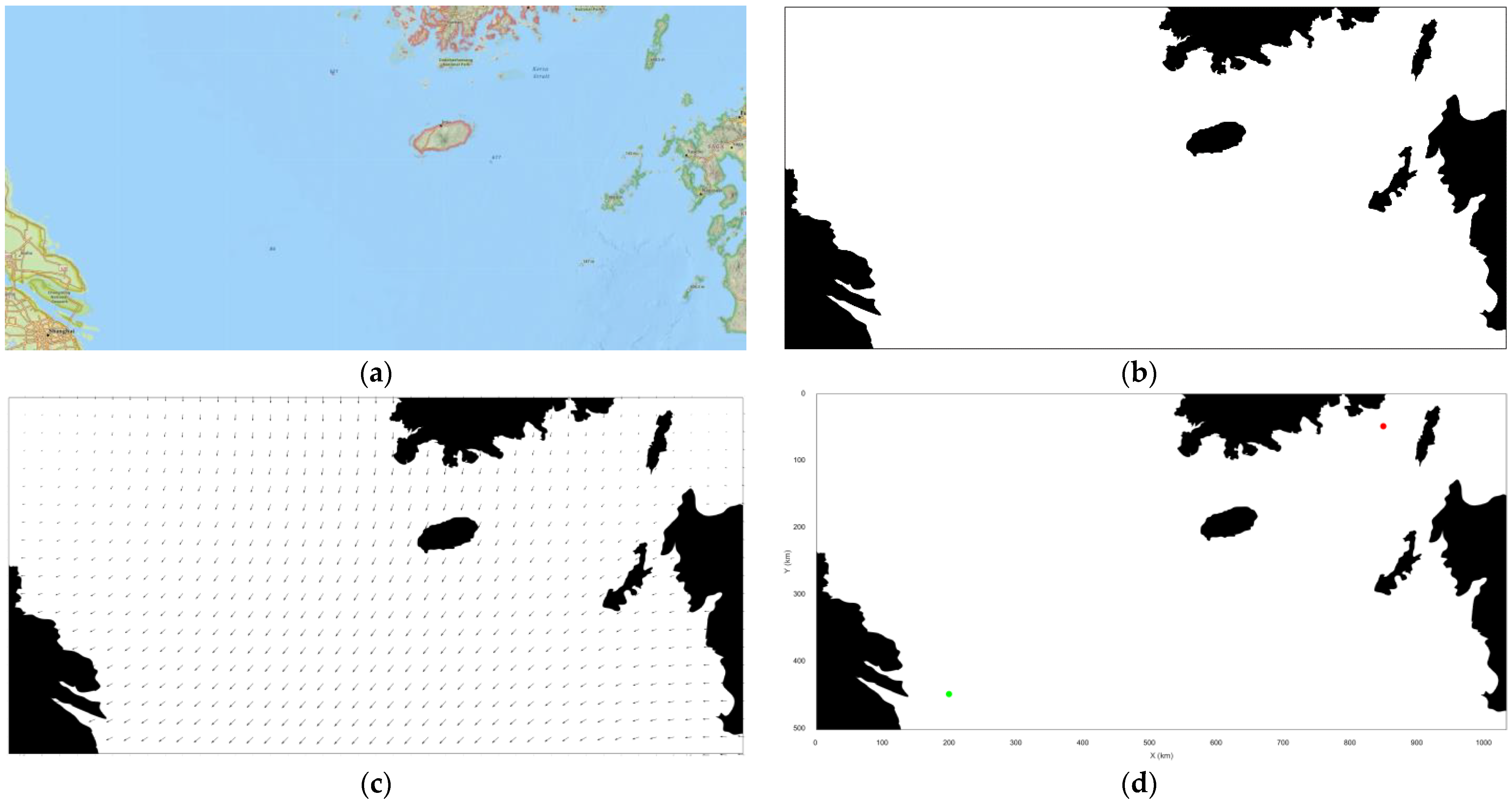
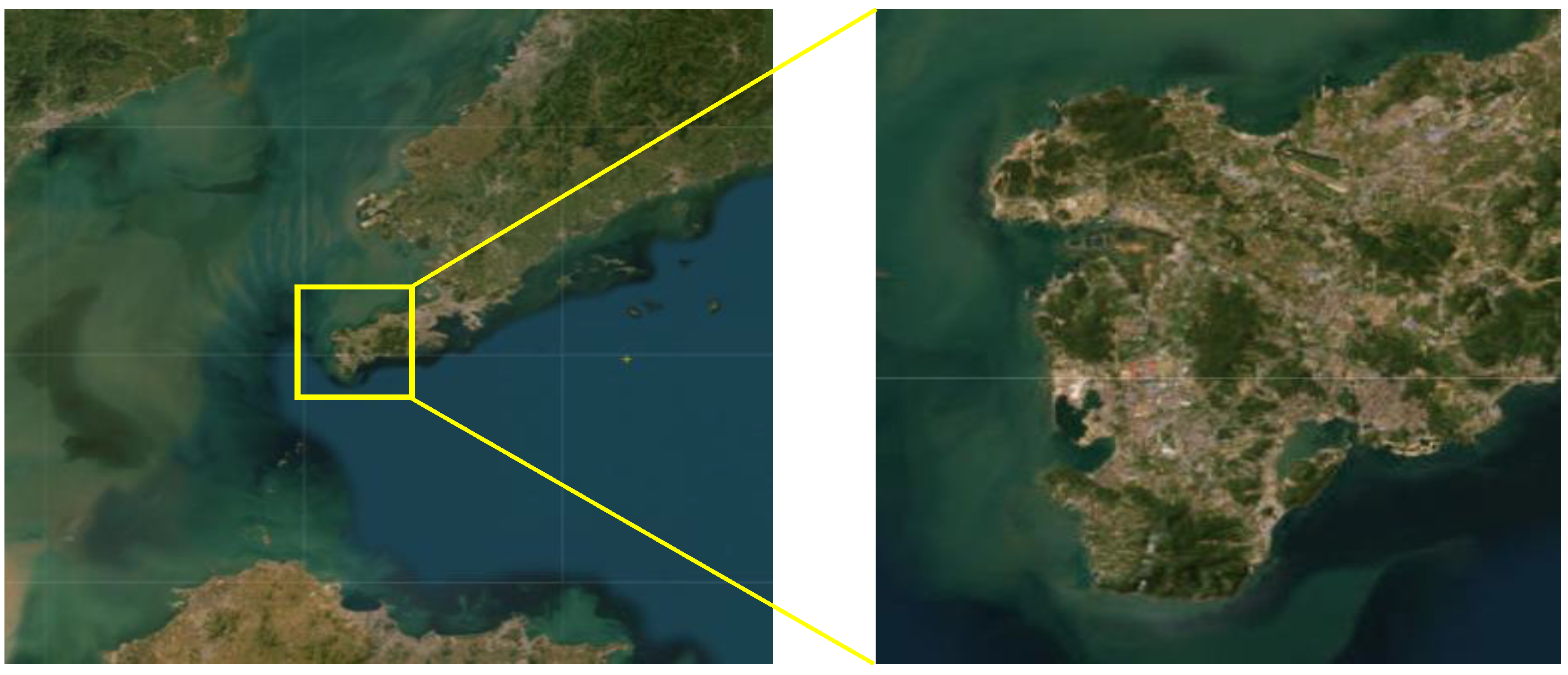
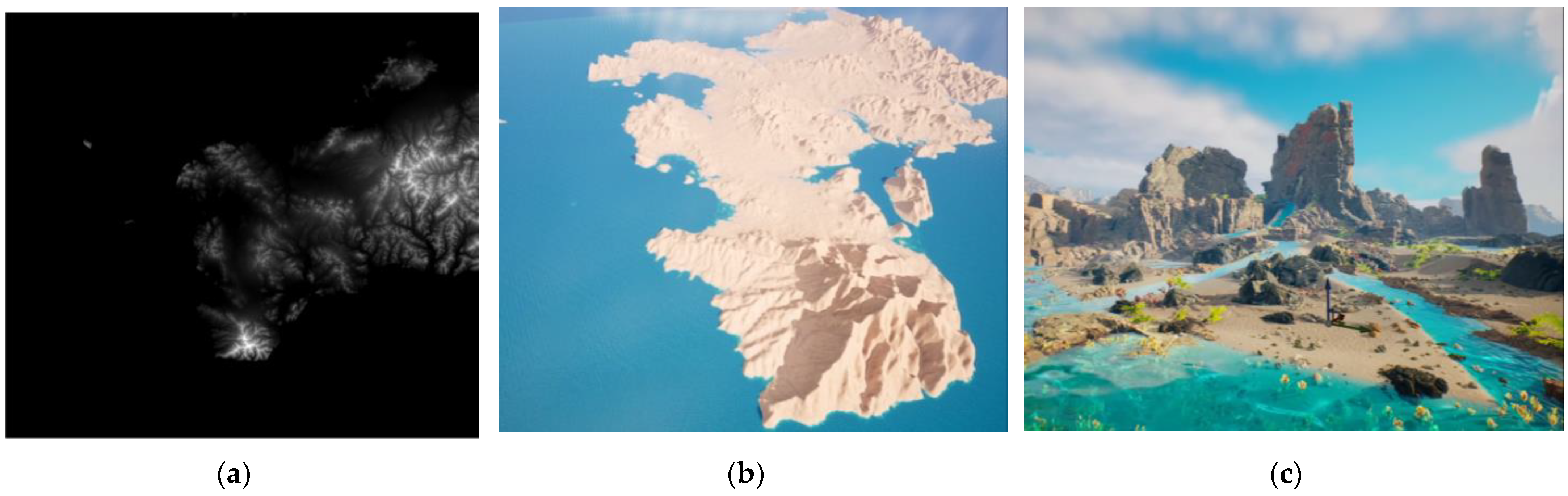
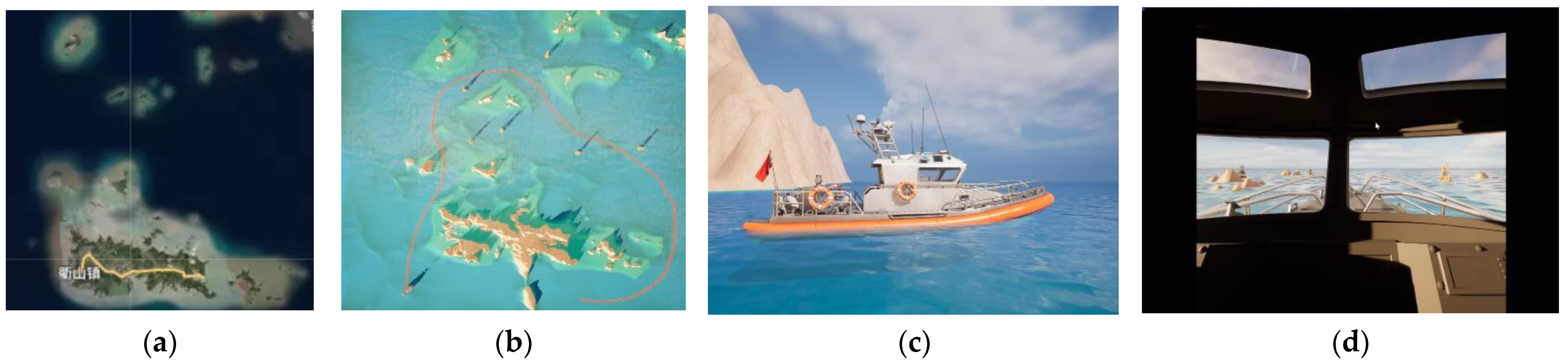
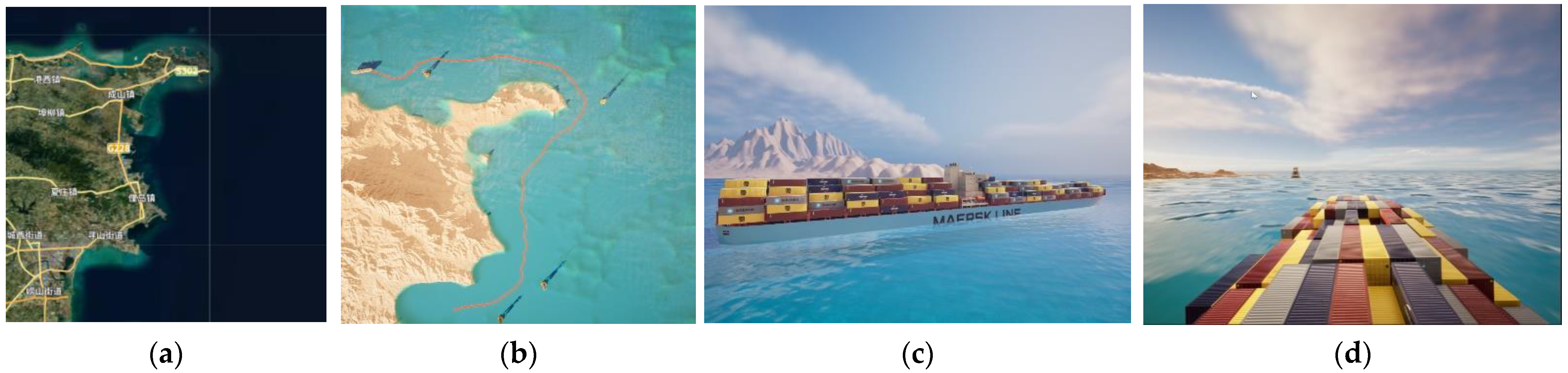
4.2.1. Testing of Virtual Terrain and Environment Construction
4.2.2. Validation of Virtual Path Planning
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Öztürk, Ü.; Akdağ, M.; Ayabakan, T. A review of path planning algorithms in maritime autonomous surface ships: Navigation safety perspective. Ocean Eng. 2022, 251, 111010. [Google Scholar] [CrossRef]
- Ali, H.; Xiong, G.; Tianci, Q.; Kumar, R.; Dong, X.; Shen, Z. Autonomous ship navigation with an enhanced safety collision avoidance technique. ISA Trans. 2024, 144, 271–281. [Google Scholar] [CrossRef]
- Zhen, R.; Gu, Q.; Shi, Z.; Suo, Y. An Improved A-Star Ship Path-Planning Algorithm Considering Current, Water Depth, and Traffic Separation Rules. J. Mar. Sci. Eng. 2023, 11, 7. [Google Scholar] [CrossRef]
- Rubio-Tamayo, J.L.; Barrio, M.G.; García, F.G. Immersive Environments and Virtual Reality: Systematic Review and Advances in Communication, Interaction and Simulation. Multimodal Technol. Interact. 2017, 1, 4. [Google Scholar] [CrossRef]
- Zaccone, R.; Martelli, M. A collision avoidance algorithm for ship guidance applications. J. Mar. Eng. Technol. 2019, 19 (Suppl. S1), 62–75. [Google Scholar] [CrossRef]
- Zhang, R. Construction of Virtual Ship Simulation Practical Training Platform. In Proceedings of the 2018 3rd International Conference on Automation, Mechanical Control and Computational Engineering (AMCCE 2018), Dalian, China, 12–13 May 2018; Atlantis Press: Amsterdam, The Netherlands, 2018; pp. 269–274. [Google Scholar] [CrossRef]
- Yin, J.; Ren, H.; Zhou, Y. The Whole Ship Simulation Training Platform Based on Virtual Reality. IEEE Open J. Intell. Transp. Syst. 2021, 2, 207–215. [Google Scholar] [CrossRef]
- Ueng, S.-K.; Lin, D.; Liu, C.-H. A ship motion simulation system. Virtual Real. 2008, 12, 65–76. [Google Scholar] [CrossRef]
- Benedict, K.; Fischer, S.; Gluch, M.; Kirchhoff, M.; Schaub, M.; Baldauf, M.; Müller, B. Innovative Fast Time Simulation Tools for Briefing / Debriefing in Advanced Ship Handling Simulator Training and Ship Operation. Trans. Marit. Sci. 2017, 6, 24–38. [Google Scholar] [CrossRef]
- Zhu, Z.; Li, L.; Wu, W.; Jiao, Y. Application of improved Dijkstra algorithm in intelligent ship path planning. In Proceedings of the 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; pp. 4926–4931. [Google Scholar] [CrossRef]
- Li, Y.; Chen, J.; Luo, X.; Bai, X. A Multi-Constraint Planning Approach for Offshore Test Tasks for an Intelligent Technology Test Ship. Processes 2024, 12, 392. [Google Scholar] [CrossRef]
- Niu, Y.; Zhang, J.; Wang, Y.; Yang, H.; Mu, Y. A Review of Path Planning Algorithms for USV. In Proceedings of the 2021 International Conference on Autonomous Unmanned Systems (ICAUS 2021), ICAUS 2021, Changsha, China, 24–26 September 2022; Wu, M., Niu, Y., Gu, M., Cheng, J., Eds.; Lecture Notes in Electrical Engineering. Springer: Singapore, 2022; Volume 861. [Google Scholar] [CrossRef]
- Zhou, Z.; He, X.; Xu, L.; Qu, C. Simulation Platform for USV Path Planning based on Unity3D and A* Algorithm. In Proceedings of the 2019 IEEE International Conference on Signal, Information and Data Processing (ICSIDP), Chongqing, China, 11–13 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Kim, M.-S.; Lee, K.-K.; Kim, D.H. Experimental Validation of Longitudinal Control of a Platoon of Vessels Established via the V-REP Simulator. Int. J. FUZZY Log. Intell. Syst. 2019, 19, 263–271. [Google Scholar] [CrossRef]
- Wang, S.; Yang, J.; Hu, R.; Qingnian, Z. Research on Unmanned Ship Simulation on the basis of Unity3d. In Proceedings of the 1st International Conference on Control and Computer Vision, in ICCCV ’18, Singapore, 15–18 June 2018; Association for Computing Machinery: New York, NY, USA, 2018; pp. 101–105. [Google Scholar] [CrossRef]
- Shin, I.-S.; Beirami, M.; Cho, S.-J.; Yu, Y.-H. Development of 3D Terrain Visualization for Navigation Simulation using a Unity 3D Development Tool. J. Adv. Mar. Eng. Technol. 2015, 39, 570–576. [Google Scholar] [CrossRef]
- Zhang, L.; Mou, J.; Chen, P.; Li, M. Path Planning for Autonomous Ships: A Hybrid Approach Based on Improved APF and Modified VO Methods. J. Mar. Sci. Eng. 2021, 9, 761. [Google Scholar] [CrossRef]
- Xue, Y.; Liu, Y.; Xue, G.; Chen, G. Identification and Prediction of Ship Maneuvering Motion Based on a Gaussian Process with Uncertainty Propagation. J. Mar. Sci. Eng. 2021, 9, 8. [Google Scholar] [CrossRef]
- Xiao, G.; Zheng, G.; Tong, C.; Hong, X. A Virtual System and Method for Autonomous Navigation Performance Testing of Unmanned Surface Vehicles. J. Mar. Sci. Eng. 2023, 11, 11. [Google Scholar] [CrossRef]
- Wang, N.; Wang, Y.; Zhao, Y.; Wang, Y.; Li, Z. Sim-to-Real: Mapless Navigation for USVs Using Deep Reinforcement Learning. J. Mar. Sci. Eng. 2022, 10, 7. [Google Scholar] [CrossRef]
- Zhou, X.; Wu, P.; Zhang, H.; Guo, W.; Liu, Y. Learn to Navigate: Cooperative Path Planning for Unmanned Surface Vehicles Using Deep Reinforcement Learning. IEEE Access 2019, 7, 165262–165278. [Google Scholar] [CrossRef]
- Zhou, J.; Ding, F.; Yang, J.; Pei, Z.; Wang, C.; Zhang, A. Navigation safety domain and collision risk index for decision support of collision avoidance of USVs. Int. J. Nav. Archit. Ocean. Eng. 2021, 13, 340–350. [Google Scholar] [CrossRef]
- Peng, Z.; Li, J.; Han, B.; Gu, N. Safety-Certificated Line-of-Sight Guidance of Unmanned Surface Vehicles for Straight-Line Following in a Constrained Water Region Subject to Ocean Currents. J. Marine. Sci. Appl. 2023, 22, 602–613. [Google Scholar] [CrossRef]
- Liu, S.; Wang, C.; Zhang, A. A Method of Path Planning on Safe Depth for Unmanned Surface Vehicles Based on Hydrodynamic Analysis. Appl. Sci. 2019, 9, 3228. [Google Scholar] [CrossRef]
- Yin, J.; Zou, Z.; Xu, F. On-line prediction of ship roll motion during maneuvering using sequential learning RBF neuralnetworks. Ocean Eng. 2013, 61, 139–147. [Google Scholar] [CrossRef]
- Guo, X.; Ji, M.; Zhao, Z.; Wen, D.; Zhang, W. Global path planning and multi-objective path control for unmanned surface vehicle based on modified particle swarm optimization (PSO) algorithm. Ocean Eng. 2020, 216, 107693. [Google Scholar] [CrossRef]
- Xin, J.; Zhong, J.; Li, S.; Sheng, J.; Cui, Y. Greedy Mechanism Based Particle Swarm Optimization for Path Planning Problem of an Unmanned Surface Vehicle. Sensors 2019, 19, 21. [Google Scholar] [CrossRef] [PubMed]
- Romero, M.; Sewell, B. Blueprints Visual Scripting for Unreal Engine 5: Unleash the true Power of Blueprints to Create Impressive Games and Applications in UE5; Packt Publishing Ltd.: Birmingham, UK, 2022. [Google Scholar]
- Tai, N.C.; Yeh, T.W. Investigation of Computer-Simulated Visual Realism for Envisioning the Illusory Visual Effect of Installation Art Using Depth Reversal. J. Asian Archit. Build. Eng. 2017, 16, 581–587. [Google Scholar] [CrossRef]
- Li, R. Real-world large-scale terrain model reconstruction and real-time rendering. In Proceedings of the 28th International ACM Conference on 3D Web Technology, San Sebastian, Spain, 9–11 October 2023. [Google Scholar] [CrossRef]
- Cavaleri, L.; Alves, J.-H.; Ardhuin, F.; Babanin, A.; Banner, M.; Belibassakis, K.; Benoit, M.; Donelan, M.; Groeneweg, J.; Herbers, T.; et al. Wave modelling–The state of the art. Prog. Oceanogr. 2007, 75, 603–674. [Google Scholar] [CrossRef]
- Borges, M.; Symington, A.; Coltin, B.; Smith, T.; Ventura, R. HTC Vive: Analysis and Accuracy Improvement. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 2610–2615. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Motion Direction | Motion Range | Static Precision |
|---|---|---|
| Pitch Motion | −40° to 40° | ≤1° |
| Pitch Angular Speed | 0.5°/s~2°/s | ±5% to ±10% |
| Heave Motion | −20 cm to 20 cm | ≤0.4 cm |
| Heave Motion Speed | 0.8 cm/s~2.0 cm/s | ±5% to ±10% |
| Algorithm | Motion Range | Static Precision |
|---|---|---|
| Our model | 0.56 | 0.412 |
| Random forest | 1.52 | 0.790 |
| SVM | 1.08 | 0.531 |
| Model | Sailing Distance (nm) | Maximum Roll Angle (deg) | Average Roll Angle (deg) |
|---|---|---|---|
| Traditional Constraint Model | 434.15 | 4.62 | 3.50 |
| Optimized Constraint Model | 449.06 | 3.85 | 3.13 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, B.; Li, M.; Qi, Z.; Li, J.; Wu, J.; Wang, Q. Exploring Innovative Methods in Maritime Simulation: A Ship Path Planning System Utilizing Virtual Reality and Numerical Simulation. J. Mar. Sci. Eng. 2024, 12, 1587. https://doi.org/10.3390/jmse12091587
Li B, Li M, Qi Z, Li J, Wu J, Wang Q. Exploring Innovative Methods in Maritime Simulation: A Ship Path Planning System Utilizing Virtual Reality and Numerical Simulation. Journal of Marine Science and Engineering. 2024; 12(9):1587. https://doi.org/10.3390/jmse12091587
Chicago/Turabian StyleLi, Bing, Mingze Li, Zhigang Qi, Jiashuai Li, Jiawei Wu, and Qilong Wang. 2024. "Exploring Innovative Methods in Maritime Simulation: A Ship Path Planning System Utilizing Virtual Reality and Numerical Simulation" Journal of Marine Science and Engineering 12, no. 9: 1587. https://doi.org/10.3390/jmse12091587
APA StyleLi, B., Li, M., Qi, Z., Li, J., Wu, J., & Wang, Q. (2024). Exploring Innovative Methods in Maritime Simulation: A Ship Path Planning System Utilizing Virtual Reality and Numerical Simulation. Journal of Marine Science and Engineering, 12(9), 1587. https://doi.org/10.3390/jmse12091587