
Adjustability and Stability of Flow Control by Periodic Forcing: A Numerical Investigation

Abstract
:1. Introduction
2. Problems and Method
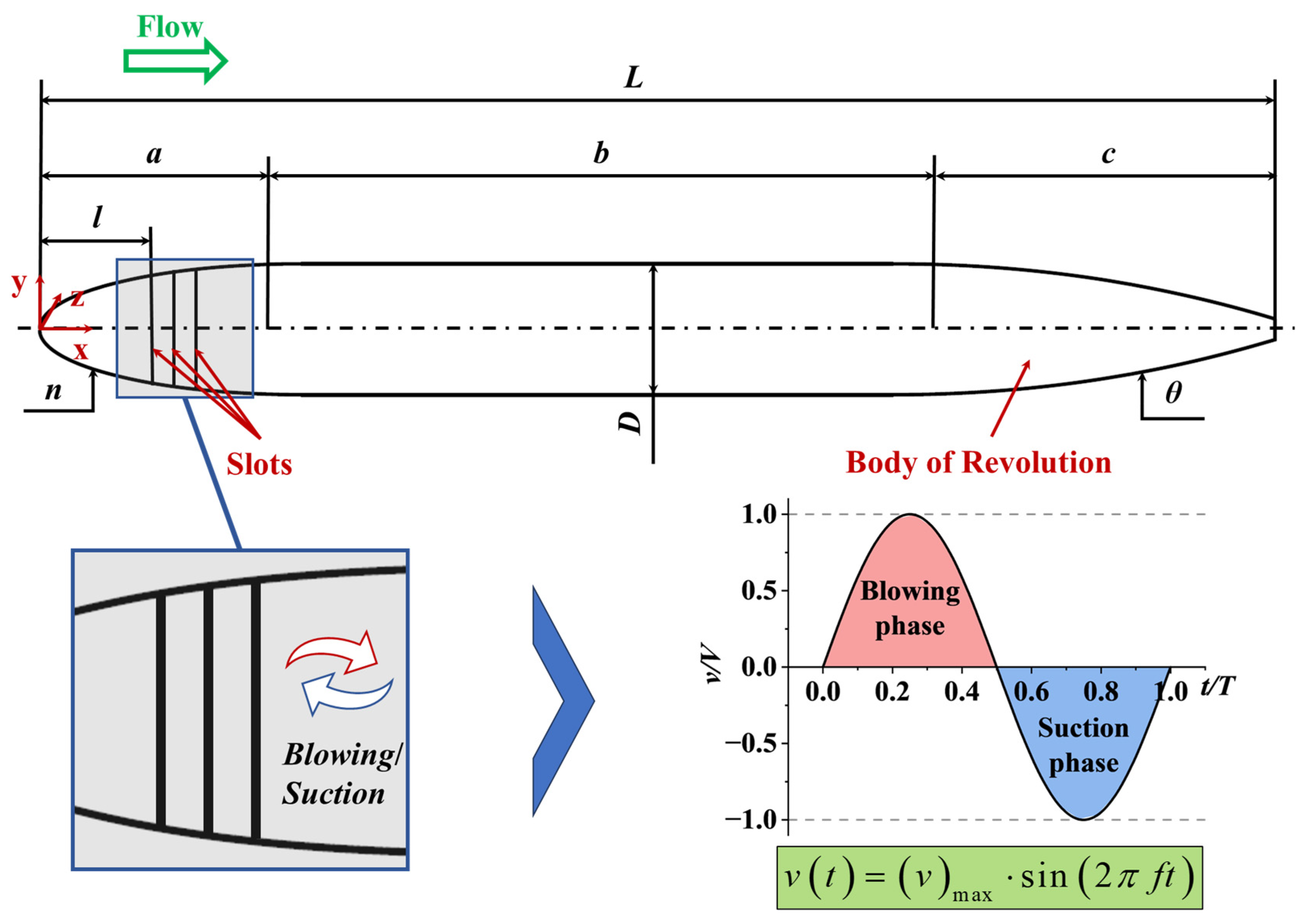
2.1. Body-of-Revolution Model
2.2. Numerical Method
2.3. Independence and Validation Study
3. Simulation Results
3.1. Adjustability and Stability Analysis
3.1.1. Adjustability Studies
3.1.2. Stability Studies
3.2. Surface-Pressure and Velocity Analysis
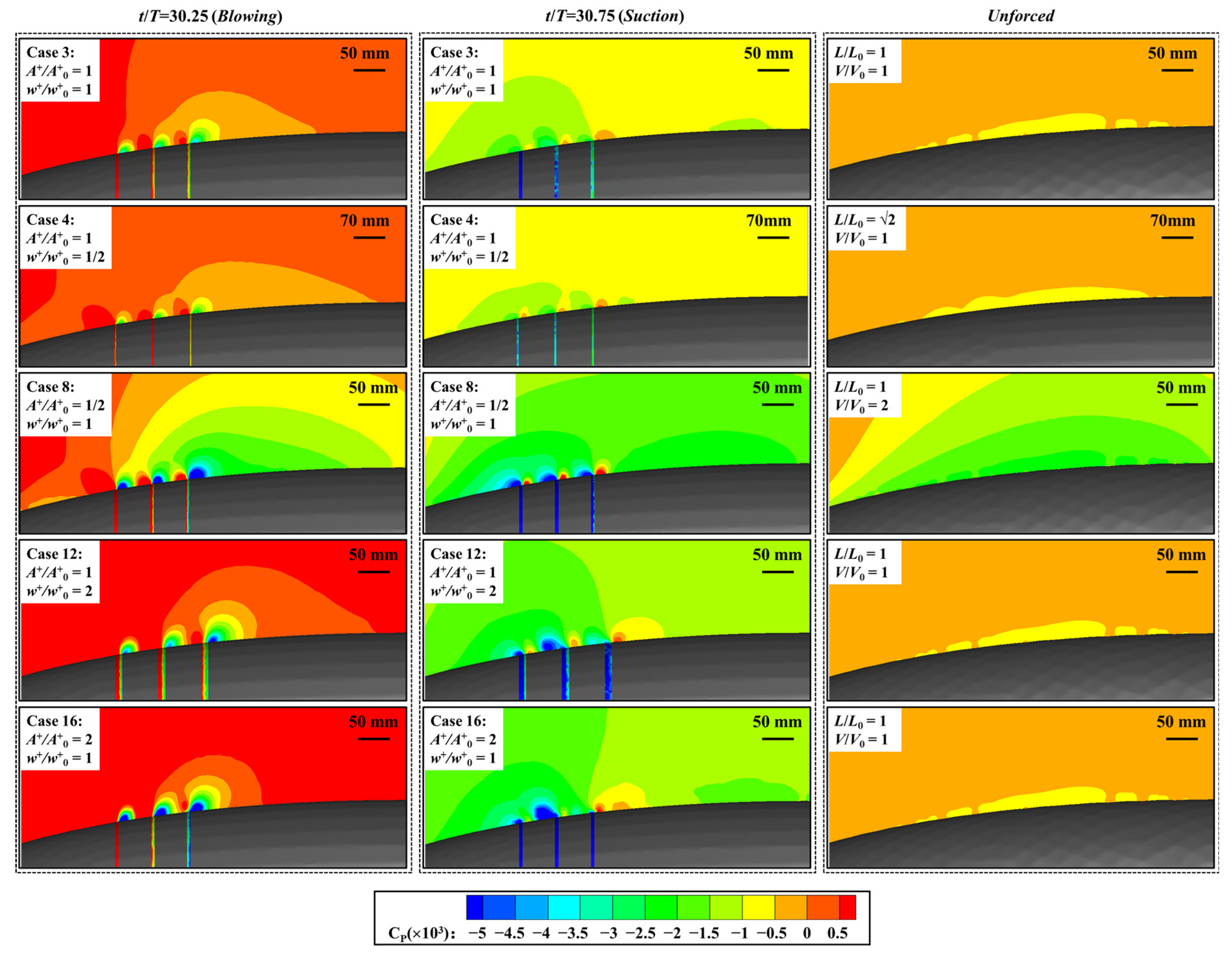
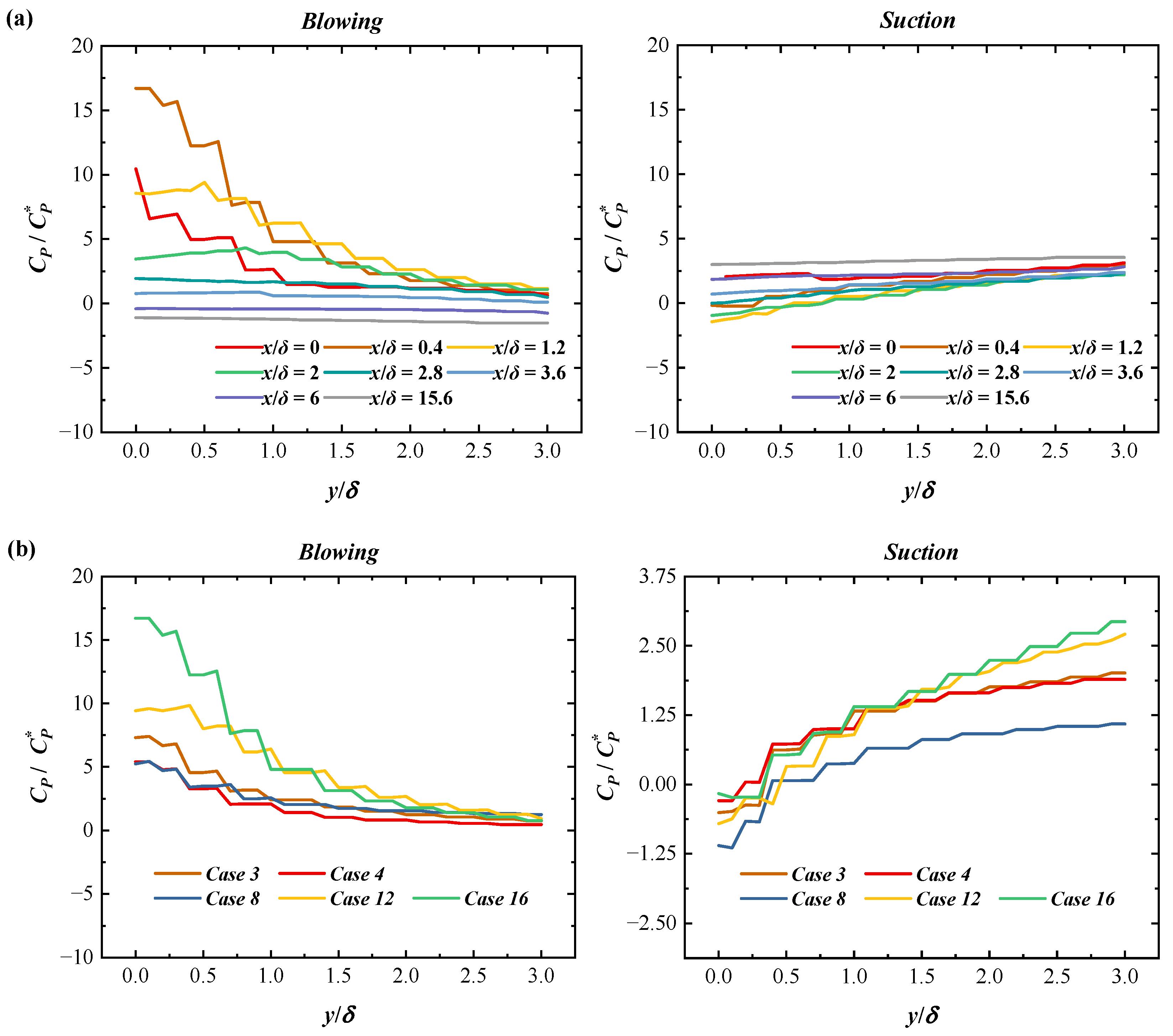
3.2.1. Surface-Pressure Analysis
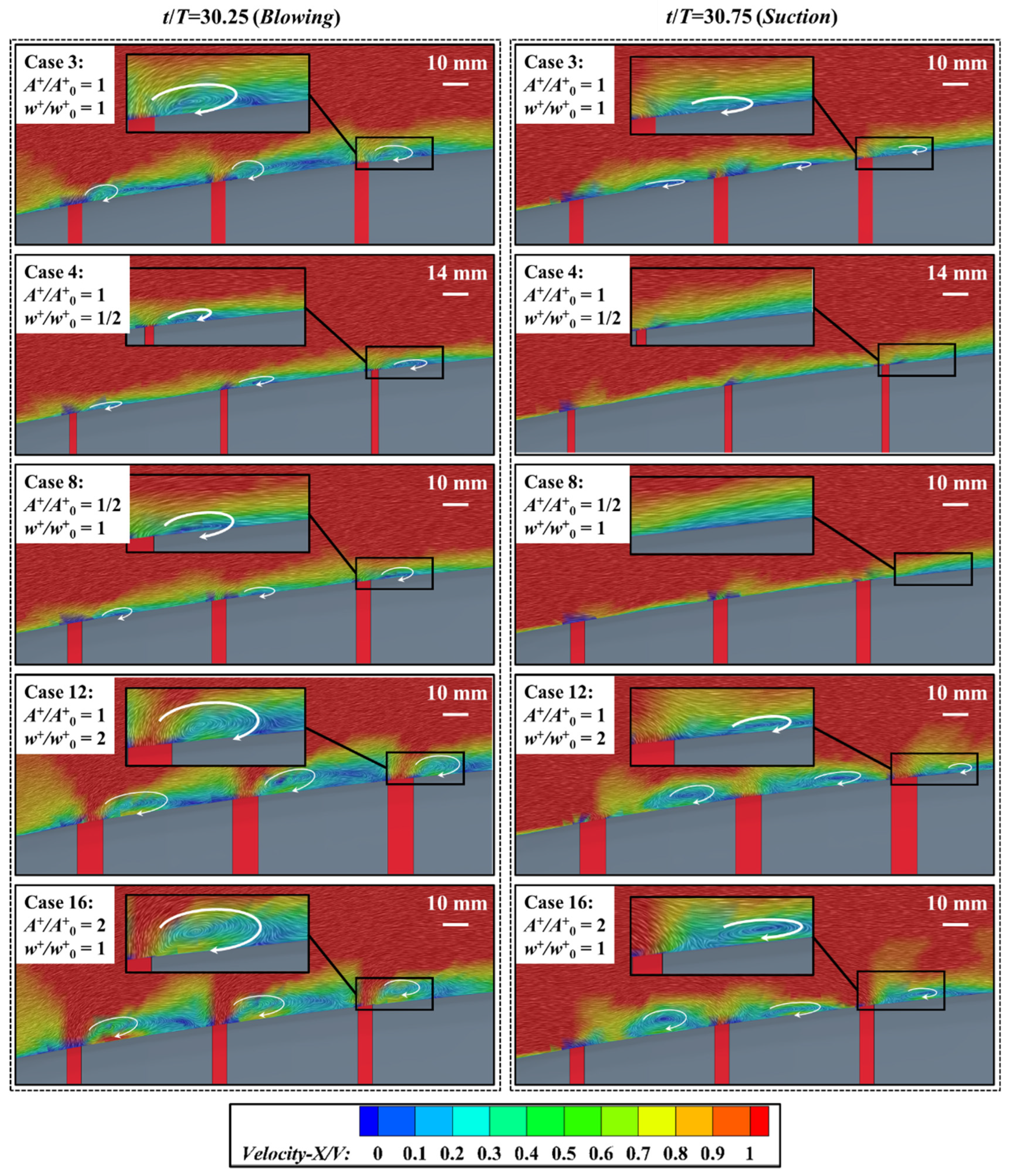
3.2.2. Surface-Velocity Analysis
4. Discussion
5. Conclusions
- (1)
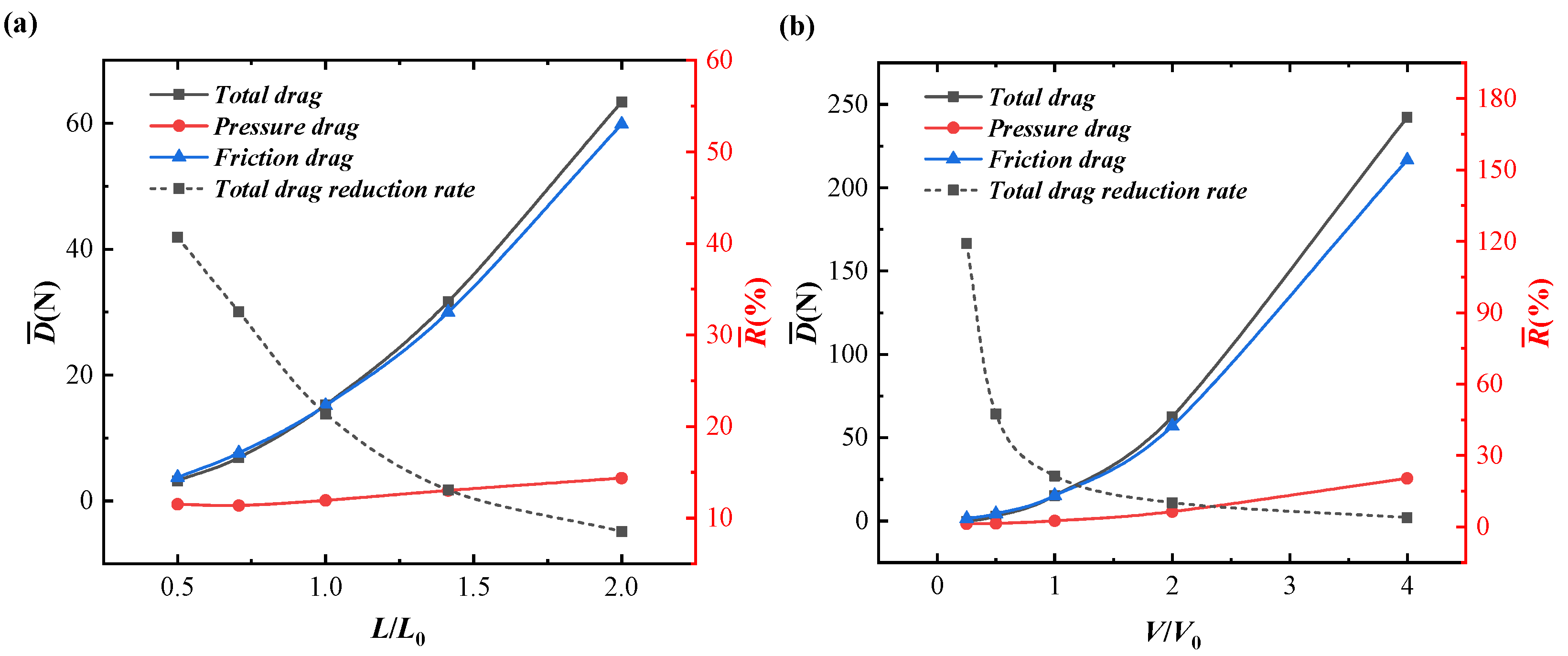
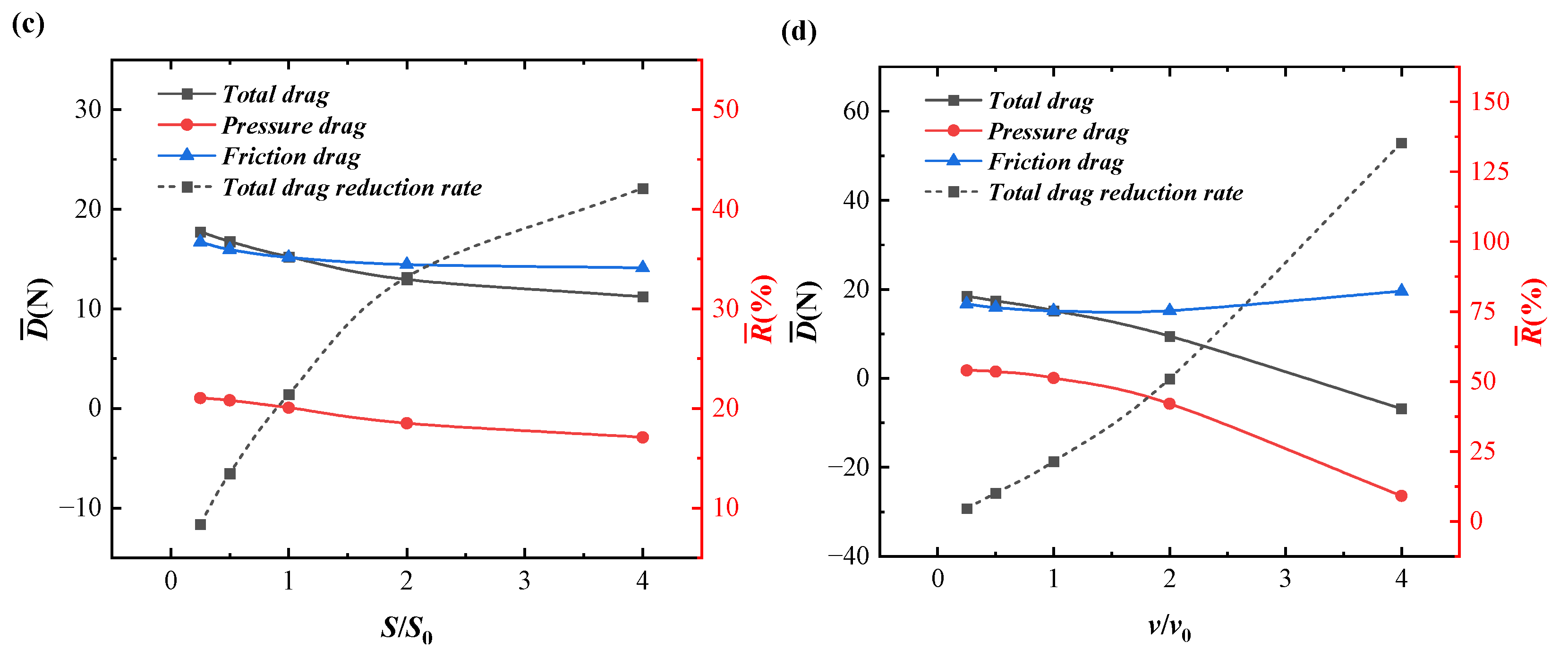
- The drag-reduction rate increases with w+ and A+. The body variables (L, V, S, and v) differ in their effect on the drag-reduction rate, with v having a stronger effect than S. As v increases, the surface pressure pushes the model vehicle; the lowest pressure drag is −26.4 N, and the maximum drag-reduction rate of total drag exceeded 135%.
- (2)
- S and v enhance the control flow Q in different ways. The expansion of S accelerates the boundary layer near-wall fluid and further blocks the fluid upstream from the slots; to a certain extent, this expands the low-pressure region downstream from the slots. Thus, the pressure and frictional drag are reduced. The maximum drag-reduction rate is 42.1%. Excessive v exacerbates the blocking effect on the fluid upstream from the slots, which greatly increases the pressure gradient downstream from them and also destroys the downstream boundary-layer structure. This results in a substantial pressure-drag decrease of 27.7 N but also in a slight increase in frictional drag, with a frictional-drag-reduction rate of −8.5%.
- (3)
- Under the same control parameters, underwater vehicles with small sizes and low speeds are more stable. For a given speed, the navigational-stability benefit is greater for vehicles with a size less than 2L0.
- (4)
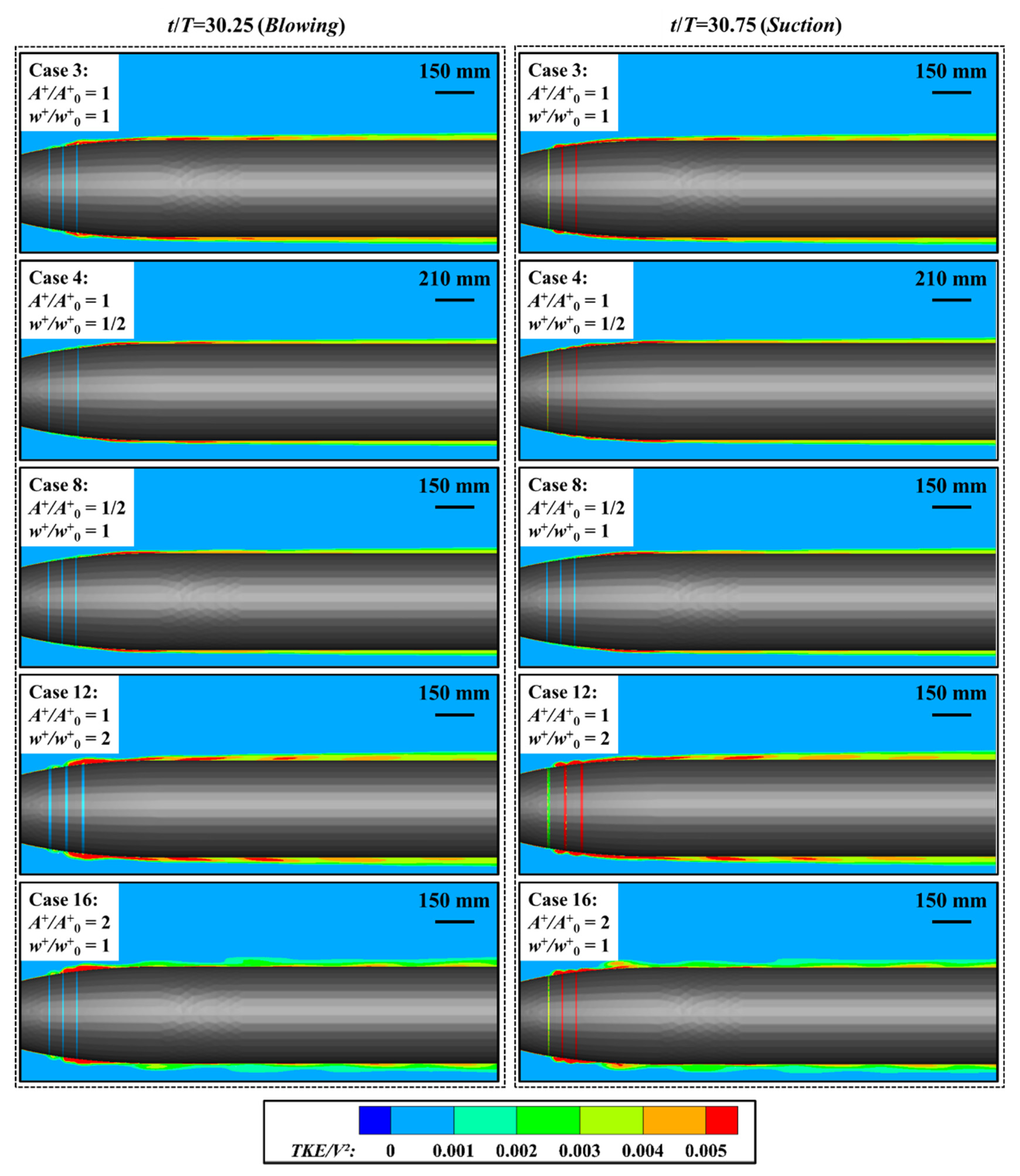
- Analyzing the surface turbulent kinetic energy reveals that high w+ and A+ drastically increase the pulsation velocity and Reynolds shear stress near the wall while greatly reducing the drag. Therefore, a specific-size body of revolution with reasonably set control parameters (w+ and A+) and an appropriate velocity (Re) will achieve optimal drag reduction.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, B.; Ji, D.; Liu, S.; Zhu, X.; Xu, W. Autonomous underwater vehicle navigation: A review. Ocean Eng. 2023, 273, 113861. [Google Scholar] [CrossRef]
- Zwolak, K.; Wigley, R.; Bohan, A.; Zarayskaya, Y.; Bazhenova, E.; Dorshow, W.; Sumiyoshi, M.; Sattiabaruth, S.; Roperez, J.; Proctor, A. The autonomous underwater vehicle integrated with the unmanned surface vessel mapping the Southern Ionian Sea. The Winning Technology Solution of the Shell Ocean Discovery XPRIZE. Remote Sens. 2020, 12, 1344. [Google Scholar] [CrossRef]
- Sahoo, A.; Dwivedy, S.K.; Robi, P. Advancements in the field of autonomous underwater vehicle. Ocean Eng. 2019, 181, 145–160. [Google Scholar] [CrossRef]
- Fiester, C.; Gomez-Ibanez, D.; Grund, M.; Purcell, M.; Jaffre, F.; Forrester, N.; Austin, T.; Stokey, R. A modular, compact, and efficient next generation remus 600 auv. In Proceedings of the OCEANS 2019-Marseille, Marseille, France, 17–20 June 2019; pp. 1–6. [Google Scholar]
- Qiao, J.; Yu, J.; Huang, Y.; Cui, J.; Wang, B.; Wang, Z. Sea-Whale Series AUV-Extending the range to 4000 kilometers. In Proceedings of the OCEANS 2022, Hampton Roads, Virtual, 17–20 October 2022; pp. 1–5. [Google Scholar]
- Cui, Z.; Li, L.; Wang, Y.; Zhong, Z.; Li, J. Review of research and control technology of underwater bionic robots. Intell. Mar. Technol. Syst. 2023, 1, 7. [Google Scholar] [CrossRef]
- Liang, J.; Feng, J.-C.; Zhang, S.; Cai, Y.; Yang, Z.; Ni, T.; Yang, H.-Y. Role of deep-sea equipment in promoting the forefront of studies on life in extreme environments. Iscience 2021, 24, 103299. [Google Scholar] [CrossRef]
- Abdulbari, H.A.; Yunus, R.; Abdurahman, N.; Charles, A. Going against the flow—A review of non-additive means of drag reduction. J. Ind. Eng. Chem. 2013, 19, 27–36. [Google Scholar] [CrossRef]
- Kumar, S.; Pandey, K.M.; Sharma, K.K. Advances in drag-reduction methods related with boundary layer control–A review. Mater. Today Proc. 2021, 45, 6694–6701. [Google Scholar] [CrossRef]
- Liu, G.; Yuan, Z.; Qiu, Z.; Feng, S.; Xie, Y.; Leng, D.; Tian, X. A brief review of bio-inspired surface technology and application toward underwater drag reduction. Ocean Eng. 2020, 199, 106962. [Google Scholar] [CrossRef]
- Tian, G.; Fan, D.; Feng, X.; Zhou, H. Thriving artificial underwater drag-reduction materials inspired from aquatic animals: Progresses and challenges. RSC Adv. 2021, 11, 3399–3428. [Google Scholar] [CrossRef]
- Perlin, M.; Dowling, D.R.; Ceccio, S.L. Freeman scholar review: Passive and active skin-friction drag reduction in turbulent boundary layers. J. Fluids Eng. 2016, 138, 091104. [Google Scholar] [CrossRef]
- Zhang, L.; Shan, X.; Xie, T. Active control for wall drag reduction: Methods, mechanisms and performance. IEEE Access 2020, 8, 7039–7057. [Google Scholar] [CrossRef]
- Meng, L.; Yang, L.; Su, T.C.; Gu, H. Study on the influence of porous material on underwater vehicle’s hydrodynamic characteristics. Ocean Eng. 2019, 191, 106528. [Google Scholar] [CrossRef]
- Panda, J.P.; Warrior, H.V. Numerical Studies on Drag Reduction of an Axisymmetric Body of Revolution with Antiturbulence Surface. J. Offshore Mech. Arct. Eng. 2021, 143, 064501. [Google Scholar] [CrossRef]
- Panda, J.P.; Warrior, H.V. Mechanics of drag reduction of an axisymmetric body of revolution with shallow dimples. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2023, 237, 227–237. [Google Scholar] [CrossRef]
- Che, Z.-X.; Huang, S.; Li, Z.-W.; Chen, Z.-W. Aerodynamic drag reduction of high-speed maglev train based on air blowing/suction. J. Wind. Eng. Ind. Aerodyn. 2023, 233, 105321. [Google Scholar] [CrossRef]
- Posa, A.; Balaras, E. A numerical investigation of the wake of an axisymmetric body with appendages. J. Fluid Mech. 2016, 792, 470–498. [Google Scholar] [CrossRef]
- Posa, A.; Balaras, E. A numerical investigation about the effects of Reynolds number on the flow around an appended axisymmetric body of revolution. J. Fluid Mech. 2020, 884, A41. [Google Scholar] [CrossRef]
- Kametani, Y.; Fukagata, K.; Orlu, R.; Schlatter, P. Effect of uniform blowing/suction in a turbulent boundary layer at moderate Reynolds number. Int. J. Heat Fluid Flow 2015, 55, 132–142. [Google Scholar] [CrossRef]
- Noguchi, D.; Fukagata, K.; Tokugawa, N. Friction drag reduction of a spatially developing boundary layer using a combined uniform suction and blowing. J. Fluid Sci. Technol. 2016, 11, JFST0004. [Google Scholar] [CrossRef]
- Ma, R.; Gao, Z.-H.; Lu, L.-S.; Chen, S.-S. Skin-friction drag reduction by local porous uniform blowing in spatially developing compressible turbulent boundary layers. Phys. Fluids 2022, 34, 125130. [Google Scholar] [CrossRef]
- Abbas, A.; Bugeda, G.; Ferrer, E.; Fu, S.; Periaux, J.; Pons-Prats, J.; Valero, E.; Zheng, Y. Drag reduction via turbulent boundary layer flow control. Sci. China Technol. Sci. 2017, 60, 1281–1290. [Google Scholar] [CrossRef]
- Murugan, T.; Deyashi, M.; Dey, S.; Rana, S.C.; Chatterjee, P. Recent Developments on Synthetic Jets. Def. Sci. J. 2016, 66, 489–498. [Google Scholar] [CrossRef]
- Ja’fari, M.; Shojae, F.J.; Jaworski, A.J. Synthetic jet actuators: Overview and applications. Int. J. Thermofluids 2023, 20, 100438. [Google Scholar] [CrossRef]
- Park, S.; Lee, I.; Sung, H.J. Effect of local forcing on a turbulent boundary layer. Exp. Fluids 2001, 31, 384–393. [Google Scholar] [CrossRef]
- Boiko, A.V.; Kornilov, V.I. Effect of periodic blowing/suction through sequentially located annular slots on the turbulent boundary layer on a body of revolution. Thermophys. Aeromechanics 2008, 15, 11–27. [Google Scholar] [CrossRef]
- Kornilov, V.I.; Boiko, A.V. Periodic forcing of the turbulent boundary layer on a body of revolution. AIAA J. 2008, 46, 653–663. [Google Scholar] [CrossRef]
- Kornilov, V.I.; Boiko, A.V. Advances and challenges in periodic forcing of the turbulent boundary layer on a body of revolution. Prog. Aerosp. Sci. 2018, 98, 57–73. [Google Scholar] [CrossRef]
- Yang, R.; Luo, Z.; Xia, Z.; Wang, L.; Zhou, Y. Numerical study of plasma synthetic jet control on hypersonic missile. ACTA Aeronaut. Astronaut. Sin. 2016, 37, 1722–1732. [Google Scholar]
- Gil, P. Bluff Body Drag Control using Synthetic Jet. J. Appl. Fluid Mech. 2019, 12, 293–302. [Google Scholar] [CrossRef]
- Xie, F.; Perez-Munoz, J.D.; Qin, N.; Ricco, P. Drag reduction in wall-bounded turbulence by synthetic jet sheets. J. Fluid Mech. 2022, 941, A63. [Google Scholar] [CrossRef]
- Li, H.; Yu, J.; Chen, Z.; Ren, K. Numerical research on drag-reduction characteristics of a body of revolution based on periodic forcing. Ocean Eng. 2023, 280, 114909. [Google Scholar] [CrossRef]
- Fletcher, B. UUV master plan: A vision for navy UUV development. In Proceedings of the OCEANS 2000 MTS/IEEE Conference and Exhibition. Conference Proceedings (Cat. No. 00CH37158), Providence, RI, USA, 11–14 September 2000; pp. 65–71. [Google Scholar]
- Yu-Ru, X. Expectation of the Development in the Technology on Ocean Space Intelligent Unmanned Vehicles. Chin. J. Ship Res. 2006, 1, 1–4. [Google Scholar]
- Mondal, K.; Banerjee, T.; Panja, A. Autonomous underwater vehicles: Recent developments and future prospects. Int. J. Res. Appl. Sci. Eng. Technol. 2019, 7, 215–222. [Google Scholar] [CrossRef]
- Furlong, M.E.; McPhail, S.D.; Stevenson, P. A Concept Design for an Ultra-Long-Range Survey Class AUV; IEEE: Piscataway, NI, USA, 2007. [Google Scholar]
- Hang Hou, Y.; Liang, X.; Mu, X.Y. AUV hull lines optimization with uncertainty parameters based on six sigma reliability design. Int. J. Nav. Arch. Ocean Eng. 2018, 10, 499–507. [Google Scholar]
- Pope, S.B. Turbulent Flows; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Catalano, P.; Amato, M. An evaluation of RANS turbulence modelling for aerodynamic applications. Aerosp. Technol. 2003, 7, 493–509. [Google Scholar] [CrossRef]
- Mohanarangam, K.; Cheung, S.; Tu, J.Y.; Chen, L. Numerical simulation of micro-bubble drag reduction using population balance model. Ocean Eng. 2009, 36, 863–872. [Google Scholar] [CrossRef]
- Li, F.; Zhao, G.; Liu, W. Research on drag reduction performance of turbulent boundary layer on bionic jet surface. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2016, 231, 258–270. [Google Scholar] [CrossRef]
- Roache, P.J. Quantification of uncertainty in computational fluid dynamics. Annu. Rev. Fluid Mech. 1997, 29, 123–160. [Google Scholar] [CrossRef]
- Da Silva, F.D.; Tancredi, T.P.; Silva, E. Corrections for the drag on submarines due to the blockage effect. Ocean Eng. 2023, 275, 114150. [Google Scholar] [CrossRef]
- Liu, J.; Wang, M.; Yu, F.; Gao, S.; Yan, T.; He, B. Numerical study on the hull–propeller interaction of autonomous underwater vehicle. Ocean Eng. 2023, 271, 113777. [Google Scholar] [CrossRef]
- Manna, P.; Dharavath, M.; Sinha, P.K.; Chakraborty, D. Optimization of a flight-worthy scramjet combustor through CFD. Aerosp. Sci. Technol. 2013, 27, 138–146. [Google Scholar] [CrossRef]
- Stroh, A.; Hasegawa, Y.; Schlatter, P.; Frohnapfel, B. Global effect of local skin friction drag reduction in spatially developing turbulent boundary layer. J. Fluid Mech. 2016, 805, 303–321. [Google Scholar] [CrossRef]
- Liu, H.L.; Huang, T.T. Summary of DARPA Suboff Experimental Program Data. Summ. Darpa Suboff Exp. Progr. Data 1998. [Google Scholar]
- Groves, N.C.; Huang, T.T.; Chang, M.S. Geometric Characteristics of DARPA (Defense Advanced Research Projects Agency) SUBOFF Models (DTRC Model Numbers 5470 and 5471). Geom. Charact. Darpa Suboff Models 1989. [Google Scholar]
- Guo, Z.; Hong, M.; Shi, J.; Zhang, Y.; Qian, L.; Li, H. Risk assessment of unmanned underwater platforms in the South China Sea marine environment based on two-dimensional density-weighted operator and cloud barycentric Bayesian combination. Ocean Eng. 2023, 283, 115184. [Google Scholar] [CrossRef]
- Djapic, V.; Nad, D.; Mandic, F.; Miskovic, N.; Kenny, A. Navigational challenges in diver-AUV interaction for underwater mapping and intervention missions. IFAC-PapersOnLine 2018, 51, 366–371. [Google Scholar] [CrossRef]
- Kaminski, C.; Crees, T.; Ferguson, J.; Forrest, A.; Williams, J.; Hopkin, D.; Heard, G. 12 days under ice–an historic AUV deployment in the Canadian High Arctic. In Proceedings of the 2010 IEEE/OES Autonomous Underwater Vehicles, Monterey, CA, USA, 1–3 September 2010; pp. 1–11. [Google Scholar]
- McPhail, S. Autosub6000: A deep diving long range AUV. J. Bionic Eng. 2009, 6, 55–62. [Google Scholar] [CrossRef]
- Li, L.; Liu, B.; Hao, H.; Li, L.; Zeng, Z. Investigation of the drag reduction performance of bionic flexible coating. Phys. Fluids 2020, 32, 084103. [Google Scholar] [CrossRef]
- Ao, M.; Wang, M.; Zhu, F. Investigation of the turbulent drag reduction mechanism of a kind of microstructure on riblet surface. Micromach. 2021, 12, 59. [Google Scholar] [CrossRef]
- De Giorgi, M.G.; De Luca, C.G.; Ficarella, A.; Marra, F. Comparison between synthetic jets and continuous jets for active flow control: Application on a NACA 0015 and a compressor stator cascade. Aerosp. Sci. Technol. 2015, 43, 256–280. [Google Scholar] [CrossRef]
- Wang, J.; Wu., J. Aerodynamic performance improvement of a pitching airfoil via a synthetic jet. Eur. J. Mech. B. Fluids 2020, 83, 73–85. [Google Scholar] [CrossRef]
- Wang, Y.Z.; Mei, Y.F.; Aubry, N.; Chen, Z.; Wu, P.; Wu, W.T. Deep reinforcement learning based synthetic jet control on disturbed flow over airfoil. Phys. Fluids 2022, 34, 033606. [Google Scholar] [CrossRef]
- Cao, S.; Dang, N.; Ren, Z.; Zhang, J.; Deguchi, Y. Lagrangian analysis on routes to lift enhancement of airfoil by synthetic jet and their relationships with jet parameters. Aerosp. Sci. Technol. 2020, 104, 105947. [Google Scholar] [CrossRef]
- Wei, X.; Zhenbing, L.; Yan, Z.; Wenqiang, P.; Qiang, L.; Dengpan, W. Experimental and numerical investigation on opposing plasma synthetic jet for drag reduction. Chin. J. Aeronaut. 2022, 35, 75–91. [Google Scholar]
- Li, B.; Zhang, J.; Tian, H.; Ma, X.; Tang, Z.; Jiang, N. Effects of submerged synthetic jet on the coherent structures in turbulent boundary layer. Acta Mech. Sin. 2022, 38, 321590. [Google Scholar] [CrossRef]
- Liu, Y.; Ji, Z.; Wang, H.; Yu, Z.; Shan, F. On the three-dimensional flow evolution of a submerged synthetic jet with two circular orifices. Phys. Fluids 2024, 36, 015110. [Google Scholar] [CrossRef]
- Geng, L.; Hu, Z.; Lin, Y. Hydrodynamic characteristic of synthetic jet steered underwater vehicle. Appl. Ocean Res. 2018, 70, 1–13. [Google Scholar] [CrossRef]
- Chandran, D.; Zampiron, A.; Rouhi, A.; Fu, M.K.; Wine, D.; Holloway, B.; Smits, A.J.; Marusic, I. Turbulent drag reduction by spanwise wall forcing. Part 2. High-Reynolds-number experiments. J. Fluid Mech. 2023, 968, A7. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (a) GCI Estimation of WSS | |||
|---|---|---|---|
| Mesh Size (q/Million Cells) | WSS (τw/Pa) | GCI (%) | Relative Errors (/%) |
| 0.91 | 5.340 | 18.51 | 3.26 |
| 1.74 | 5.651 | 32.33 | 5.50 |
| 3.43 | 5.692 | 3.81 | 0.72 |
| 7.24 | 5.728 | 2.94 | 0.63 |
| 15.93 | 5.729 | 0.08 | 0.02 |
| (b) GCI Estimation of Drag | |||
| Number of Meshes (q/Million Cells) | Drag (D0/N) | GCI (%) | Relative Errors (/%) |
| 0.91 | 18.409 | 22.05 | 3.91 |
| 1.74 | 19.246 | 25.24 | 4.35 |
| 3.43 | 19.291 | 1.23 | 0.23 |
| 7.24 | 19.356 | 1.57 | 0.34 |
| 15.93 | 19.299 | 1.28 | 0.30 |
| Computational Domain Size | WSS (τw/Pa) | Pressure Drag (DP0/N) | Frictional Drag (DF0/N) | Drag (D0/N) |
|---|---|---|---|---|
| (2 L,3 L) | 5.728 | 1.243 | 18.112 | 19.356 |
| (4 L, 6 L) | 5.723 | 1.266 | 18.098 | 19.364 |
| (10 L, 15 L) | 5.722 | 1.262 | 18.094 | 19.357 |
| Velocity (knots) | Experimental Results (DE/N) | Numerical Results (DN/N) | Relative Errors (δDt/%) |
|---|---|---|---|
| 5.92 | 87.4 | 89.1 | −1.95 |
| 10.00 | 242.2 | 232.5 | 4.00 |
| 11.84 | 332.9 | 317.9 | 4.51 |
| 13.92 | 451.5 | 429.1 | 4.96 |
| 16.00 | 576.9 | 553.3 | 4.09 |
| 17.99 | 697.0 | 685.9 | 1.59 |
| Name | Dimension (m) | Velocity (m/s) |
|---|---|---|
| Hugin [2] | L: 6.90 m D: 0.75 m | 3.0864 |
| Remus 6000 [50] | L: 3.84 m D: 0.71 m | 2.572 |
| Remus M3V [51] | L: 0.91 m D: 0.124 m | 5.144 |
| Bluefin-21 [50] | L:4.93 m D: 0.533 m | 2.572 |
| Explorer [52] | L: 7.4 m D: 0.74 m | 1.5 |
| Autosub6000 [53] | L: 5.5 m D: 0.9 m | 1.75 |
| Sea-Whale [5] | L: 3 m D: 0.35 m | 0.5 |
| Cases | L/L0 | V/V0 | S/S0 | v/v0 | A+/A+0 | w+/w+0 | Cases | L/L0 | V/V0 | S/S0 | v/v0 | A+/A+0 | w+/w+0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 1/2 | 1 | 1 | 1 | 1 | 4 | 10 | 1 | 1 | 1/4 | 1 | 1 | 1/4 |
| 2 | √2/2 | 1 | 1 | 1 | 1 | 2 | 11 | 1 | 1 | 1/2 | 1 | 1 | 1/2 |
| 3 | 1 | 1 | 1 | 1 | 1 | 1 | 3 | 1 | 1 | 1 | 1 | 1 | 1 |
| 4 | √2 | 1 | 1 | 1 | 1 | 1/2 | 12 | 1 | 1 | 2 | 1 | 1 | 2 |
| 5 | 2 | 1 | 1 | 1 | 1 | 1/4 | 13 | 1 | 1 | 4 | 1 | 1 | 4 |
| 6 | 1 | 1/4 | 1 | 1 | 4 | 1 | 14 | 1 | 1 | 1 | 1/4 | 1/4 | 1 |
| 7 | 1 | 1/2 | 1 | 1 | 2 | 1 | 15 | 1 | 1 | 1 | 1/2 | 1/2 | 1 |
| 3 | 1 | 1 | 1 | 1 | 1 | 1 | 3 | 1 | 1 | 1 | 1 | 1 | 1 |
| 8 | 1 | 2 | 1 | 1 | 1/2 | 1 | 16 | 1 | 1 | 1 | 2 | 2 | 1 |
| 9 | 1 | 4 | 1 | 1 | 1/4 | 1 | 17 | 1 | 1 | 1 | 4 | 4 | 1 |
| Parameter | Value |
|---|---|
| Kα1 | −1.248 |
| Kα2 | 8.784 |
| Kα3 | 36.360 |
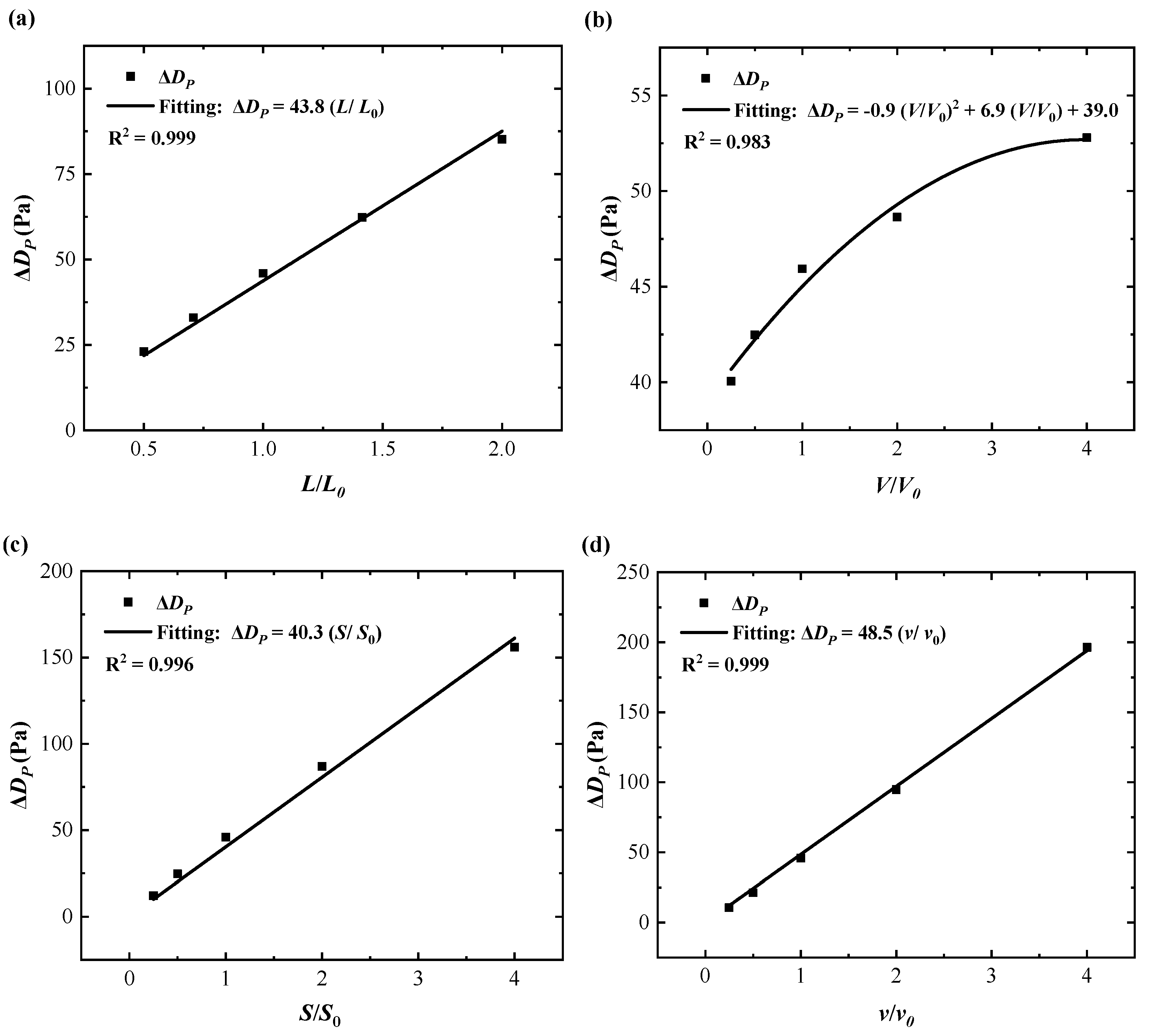
| L/L0 | v/v0 | V/V0 | S/S0 | Calculation Results (ΔDPc/N) | Simulation Results (ΔDPs/N) | Relative Errors /%) |
|---|---|---|---|---|---|---|
| 0.25 | 1 | 1 | 0.25 | 2.74 | 2.59 | 5.79 |
| 0.5 | 1 | 1 | 0.5 | 10.97 | 12.08 | 9.19 |
| 1 | 0.25 | 0.25 | 1 | 9.61 | 9.7 | 0.93 |
| 1 | 0.5 | 0.5 | 1 | 20.21 | 21 | 3.76 |
| 1 | 2 | 2 | 1 | 97.87 | 106.04 | 7.70 |
| 1 | 4 | 2 | 1 | 103.22 | 112.57 | 8.31 |
| 1 | 2 | 4 | 1 | 195.75 | 180.79 | 8.27 |
| 2 | 1 | 1 | 2 | 175.5 | 188.46 | 6.88 |
| 2 | 1 | 1 | 4 | 351 | 334.7 | 4.87 |
| 4 | 1 | 1 | 4 | 702 | 652.01 | 7.67 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Yu, J.; Chen, Z.; Ren, K.; Tan, Z. Adjustability and Stability of Flow Control by Periodic Forcing: A Numerical Investigation. J. Mar. Sci. Eng. 2024, 12, 1613. https://doi.org/10.3390/jmse12091613
Li H, Yu J, Chen Z, Ren K, Tan Z. Adjustability and Stability of Flow Control by Periodic Forcing: A Numerical Investigation. Journal of Marine Science and Engineering. 2024; 12(9):1613. https://doi.org/10.3390/jmse12091613
Chicago/Turabian StyleLi, Hongbo, Jiancheng Yu, Zhier Chen, Kai Ren, and Zhiduo Tan. 2024. "Adjustability and Stability of Flow Control by Periodic Forcing: A Numerical Investigation" Journal of Marine Science and Engineering 12, no. 9: 1613. https://doi.org/10.3390/jmse12091613