
Pitching Stabilization Control for Super Large Ships Based on Double Nonlinear Positive Feedback under Rough Sea Conditions

Abstract
1. Introduction
- (1)
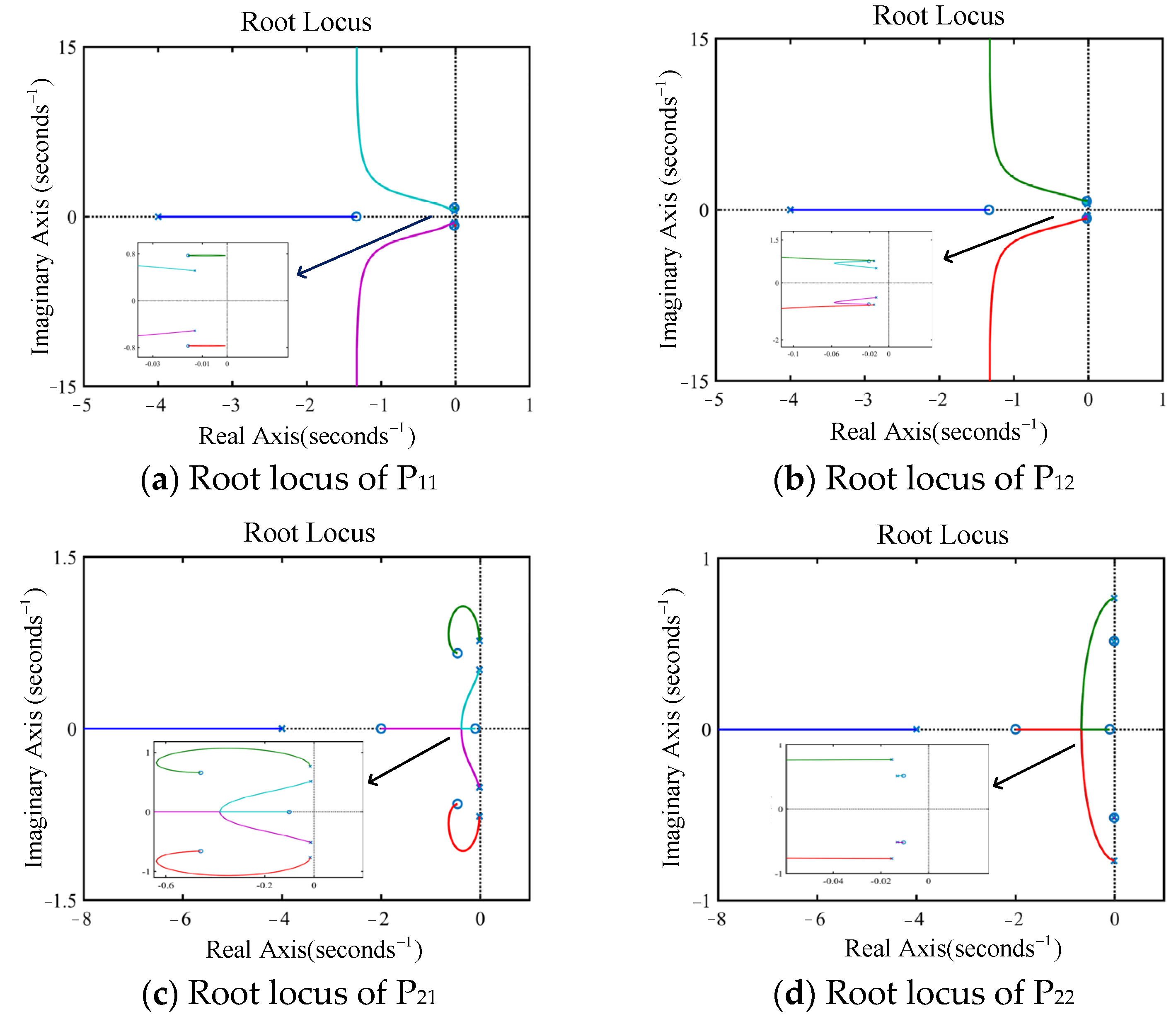
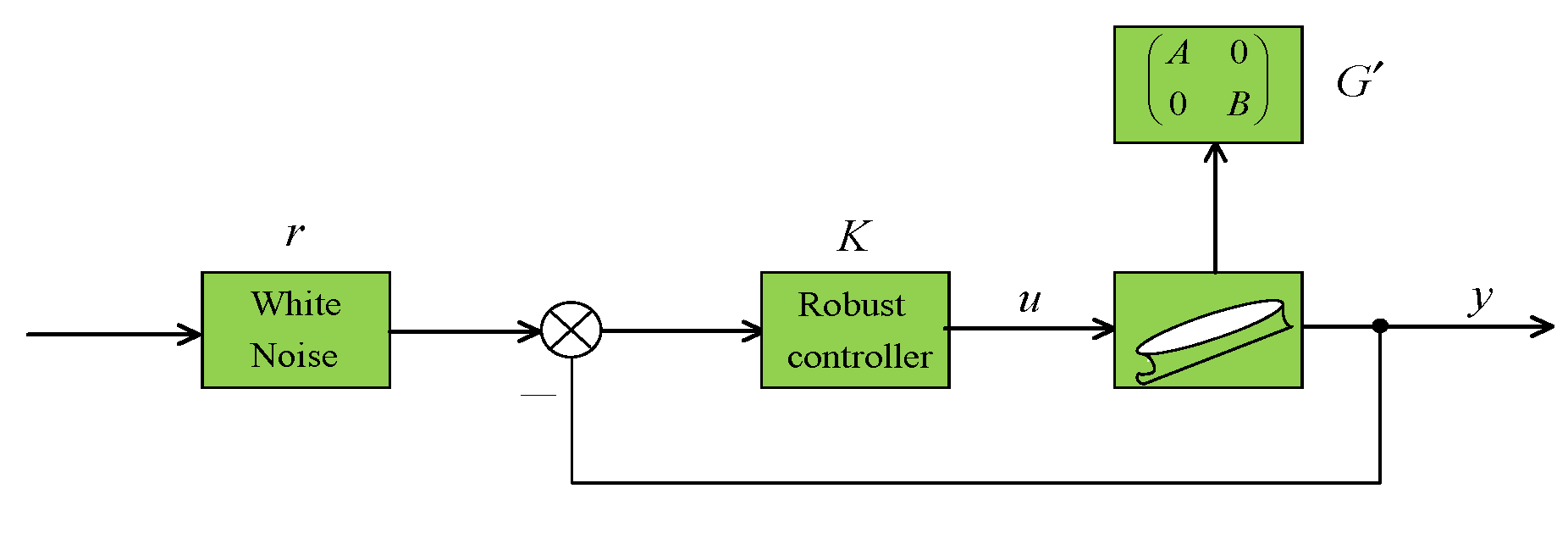
- Taking the super large oil tanker “KVLCC2” as the controlled plant, designing a simple robust controller with strong robustness for a multi-input and multi-output (MIMO) unstable mathematical model.
- (2)
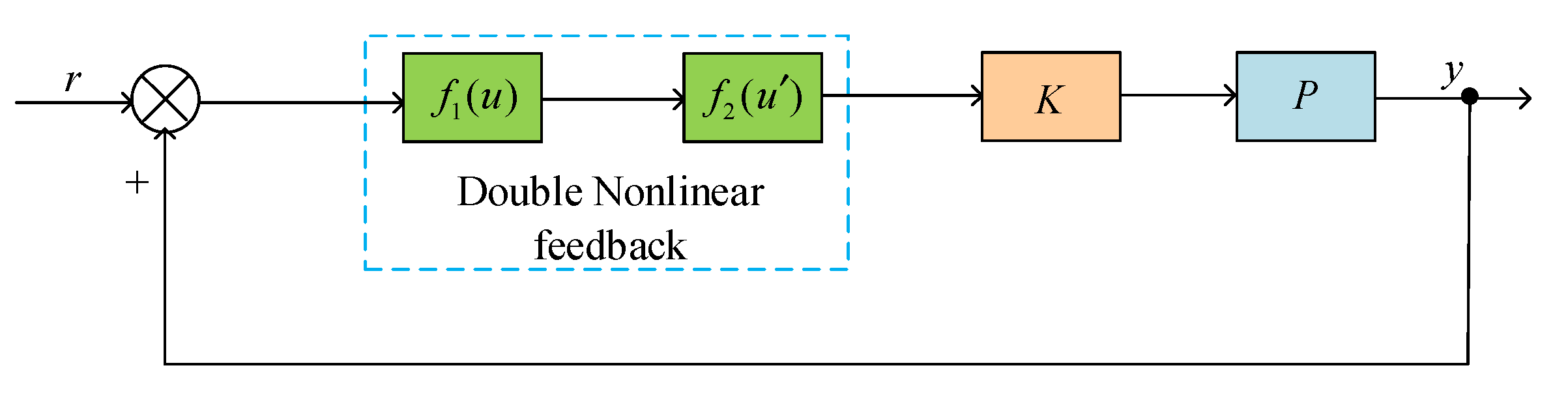
- Due to the characteristics of large inertia and long time delays for super large ships, the traditional algorithms do not yield the necessary output for response control. Therefore, this paper moves beyond the concept of single nonlinear negative feedback and puts forward a dual nonlinear positive feedback control algorithm, which improves the capacity for pitching stabilization and further solves the problem of controller energy output dissipation.
- (3)
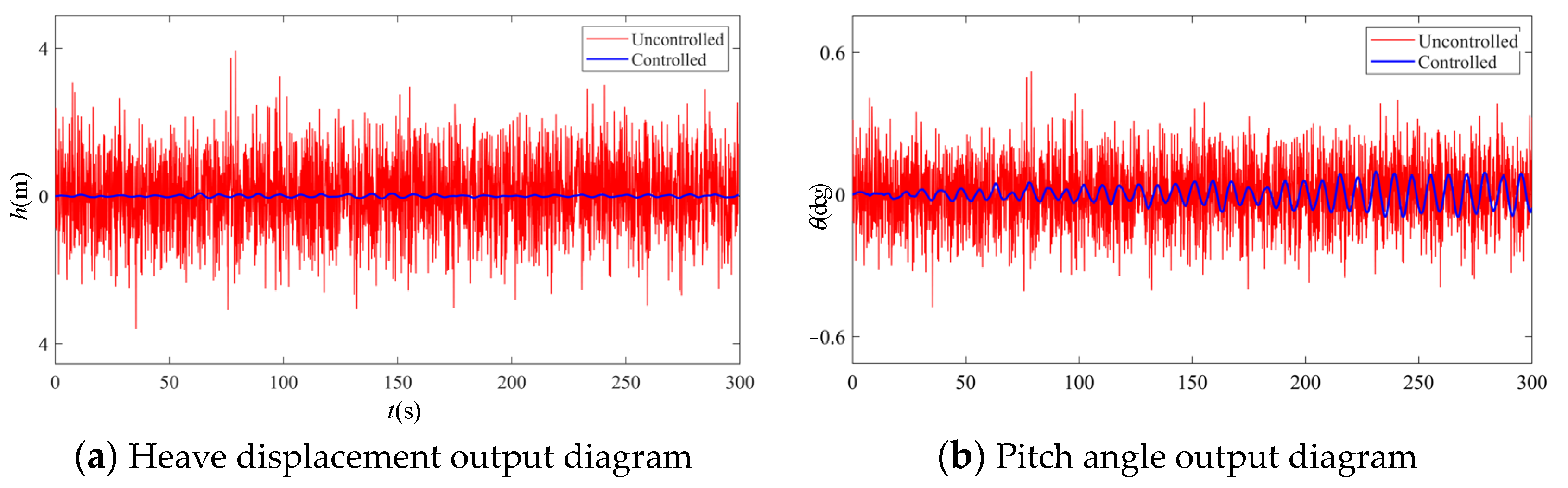
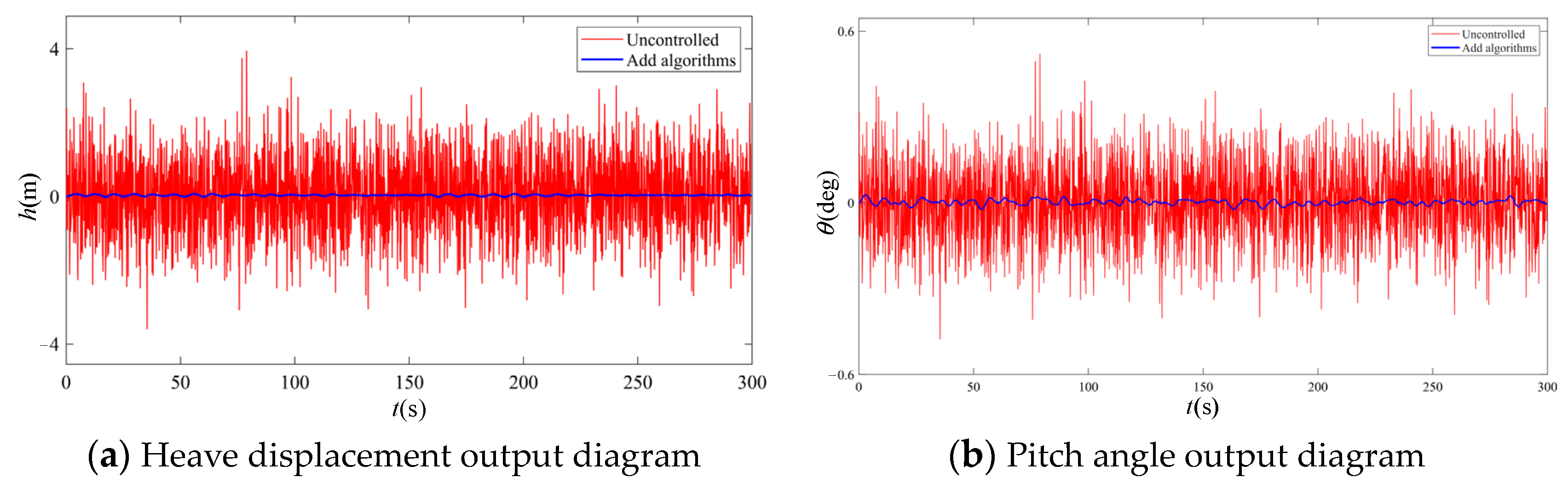
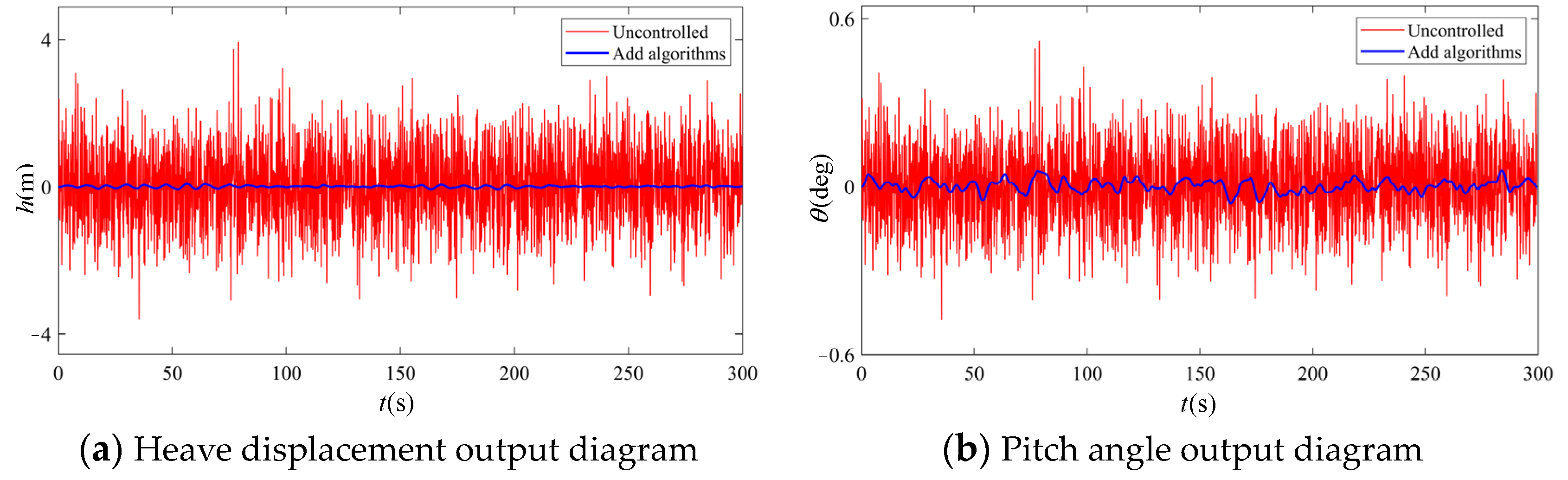
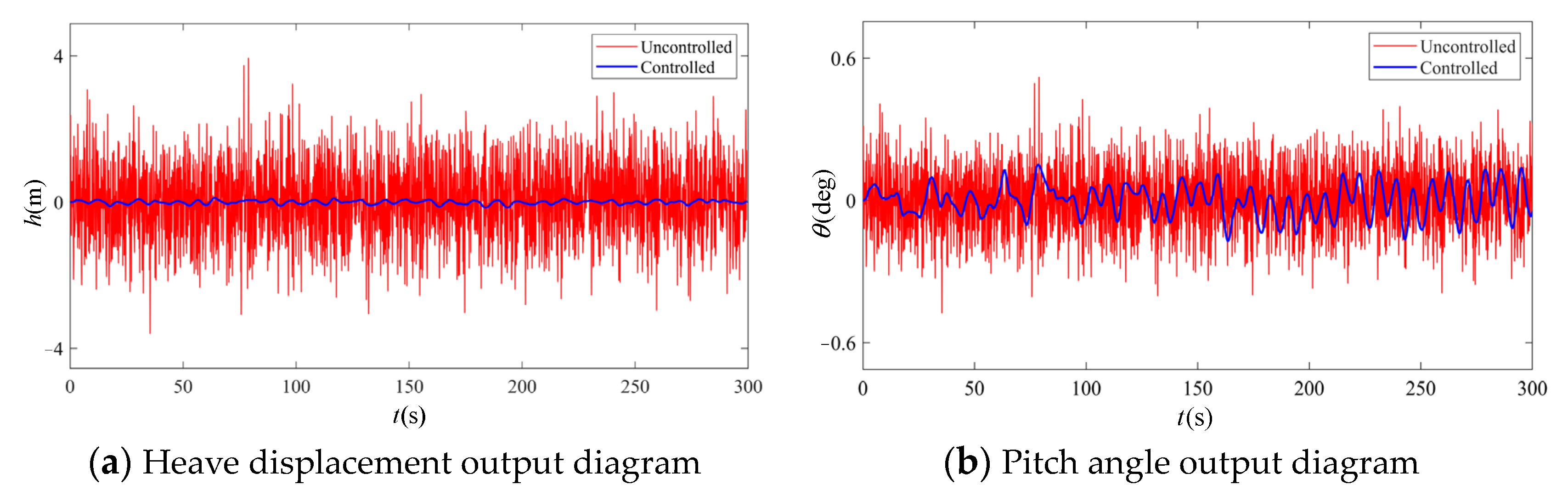
- Utilizing the improved algorithm proposed in this paper, an experiment is carried out under level 6, 7 and 8 sea states for a super large ship, respectively. The results show that the improved controller can significantly reduce the ship’s pitch angle, heave displacement and longitudinal rocking frequency under different sea conditions. The improved algorithm can still achieve the expected pitching stabilization effect under rough sea conditions.
2. Mathematical Modeling of Ship Motion
- (1)
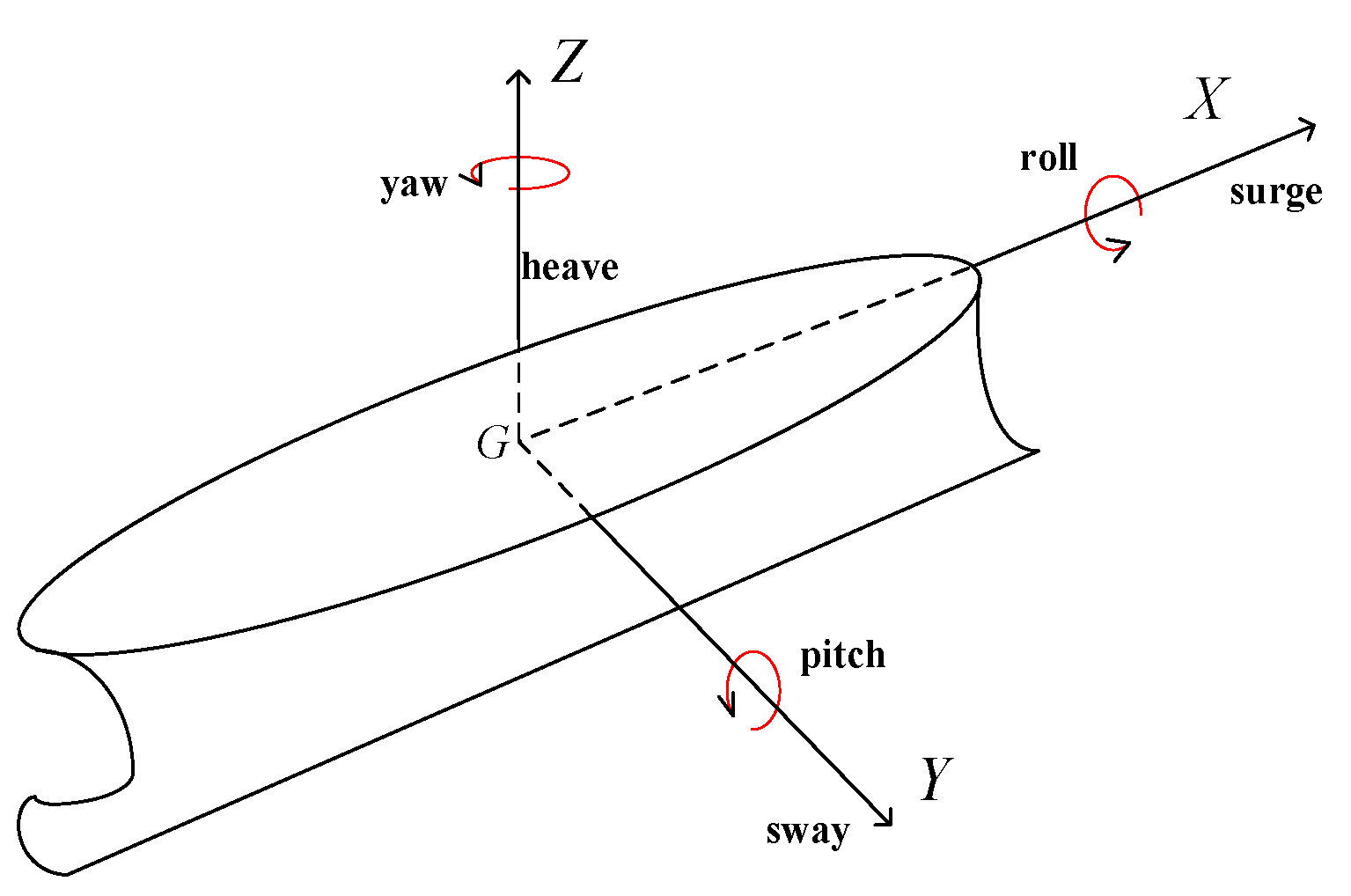
- The ship is treated as a rigid body, and its elastic deformation is ignored.
- (2)
- For the ship’s pitching stabilization control system, only two degrees of freedom of pitch and heave are considered.
3. Modeling Research Methods
4. Design of the Robust Controller
5. The Double Nonlinear Positive Feedback Control System
5.1. Positive Feedback
5.2. Dual Nonlinear Positive Feedback
- When the error is relatively low, . We let and calculate the steady-state error according to the final value theorem.
- When the value of the error is large, will not hold. The system was re-analyzed as follows.
6. The Simulation Experiment and Result Analysis
6.1. Modeling of External Interference
6.2. Verification of Dual Nonlinear Positive Feedback
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, G.; Zhang, X. A novel DVS guidance principle and robust adaptive path-following control for underactuated ships using low frequency gain-learning. ISA Trans. 2015, 56, 75–85. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Zhang, G.; Zhang, W.; Shan, Q.; Zhang, W. Cooperative path following control of USV-UAVs considering low design complexity and command transmission requirements. IEEE Trans. Intell. Veh. 2024, 9, 714–724. [Google Scholar] [CrossRef]
- Chandrasekaran, S.; Sharma, R.; Selvakumar, N.M. Dynamic analysis of drillship under extreme metocean hurricane condition in ultra-deep water. J. Mar. Sci. Technol. 2023, 28, 784–803. [Google Scholar] [CrossRef]
- Ni, J.; Huang, Y. Distribution and positioning design of ship active anti-roll fins. Ship Sci. Technol. 2022, 44, 44–47. [Google Scholar]
- Zhang, S.; Zhao, P.; Gui, M.; Liang, L. Wavelet neural network-based half-period predictive roll-reduction control using a fin stabilizer at zero speed. J. Mar. Sci. Eng. 2023, 11, 2025. [Google Scholar] [CrossRef]
- Li, W.; Huang, H.; Miao, G. Study on the effect of anti-pitching rudder on ship pitch reduction. J. Hydrodyn. 2008, 23, 585–591. [Google Scholar]
- Zhang, G.; Li, J.; Jin, X.; Liu, C. Robust adaptive neural control for wing sail assisted vehicle via the multiport event-triggered approach. IEEE Trans. Cybern. 2022, 52, 12916–12928. [Google Scholar] [CrossRef]
- Li, W.; Zhang, J.; Xu, W. High-speed multihull anti-pitching control based on heave velocity and pitch angular velocity estimation. ISA Trans. 2024, 146, 380–391. [Google Scholar] [CrossRef] [PubMed]
- Xu, W.; Zhang, J.; Zhong, M. A sliding mode predictive anti-pitching control for a high-speed multihull. Ocean Eng. 2023, 285, 115466. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, Z.; Dai, X.; Li, G. Robust decoupled anti-pitching control of a high-speed multihull. J. Mar. Sci. Technol. 2021, 26, 1112–1125. [Google Scholar] [CrossRef]
- Song, C.Y.; Zhang, X.K.; Zhang, G.Q. Attitude prediction of ship coupled heave–pitch motions using nonlinear innovation via full-scale test data. Ocean Eng. 2022, 264, 112524. [Google Scholar] [CrossRef]
- Chen, C.; Song, W. Analysis and synchronization control of a class of nonlinear feedback chaotic systems. Ship Control Decis. 2002, 17, 49–52. [Google Scholar]
- Zhang, X.; Cao, T. Reduced longitudinal rocking control of ships based on nonlinear feedback with arctangent function. J. Guangdong Ocean Univ. 2022, 42, 30–37. [Google Scholar]
- Cao, T.; Zhang, X. Nonlinear decoration control based on perturbation of ship longitudinal motion model. Appl. Ocean Res. 2023, 130, 103412. [Google Scholar] [CrossRef]
- Song, C.; Zhang, X.; Zhang, G. Nonlinear identification for 4-DOF ship maneuvering modeling via full-scale trial data. IEEE Trans. Ind. Electron. 2021, 69, 1829–1835. [Google Scholar] [CrossRef]
- Song, C.; Zhang, X.; Zhang, G. Nonlinear innovation-based maneuverability prediction for marine vehicles using an improved forgetting mechanism. J. Mar. Sci. Eng. 2022, 10, 1210. [Google Scholar] [CrossRef]
- Wu, H. Real-time simulation of ship rocking motion based on Unity3D. Master’s Thesis, Dalian Maritime University, Dalian, China, 2020. [Google Scholar]
- Cao, T.; Zhang, X. Nonlinear feedback control of ship longitudinal motion multi-input multi-output unstable system. J. Shanghai Jiao Tong Univ. 2023, 57, 972. [Google Scholar]
- Zhang, X.; Zhang, G. Nonlinear Feedback Theory and Its Application in Ship Motion Control; Dalian Maritime University Press: Dalian, China, 2020. [Google Scholar]
- Durutoye, N.; Ogunbiyi, O. Automatic generation of root locus plots for linear time invariant systems. Niger. J. Technol. 2016, 36, 155–162. [Google Scholar] [CrossRef]
- Wu, G.C.; Niyazi Çankaya, M.; Banerjee, S. Fractional q-deformed chaotic maps: A weight function approach. Chaos 2020, 30, 121106. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Zhang, G.; Zhang, X.; Zhang, W. Integrating dynamic event-triggered and sensor-tolerant control: Application to USV-UAVs cooperative formation system for maritime parallel search. IEEE Trans. Intell. Transp. Syst. 2024, 25, 3986–3998. [Google Scholar] [CrossRef]
- Guan, K.; Zhang, X. Negative feedback control algorithm for ship nonlinear roll motion. J. Shanghai Marit. Univ. 2016, 37, 58–62. [Google Scholar]
- Hu, S. Principles of Automatic Control, 4th ed.; Science Press: Beijing, China, 2021. [Google Scholar]
- Song, C.; Guo, T.; Sui, J.; Zhang, X. Dynamic Positioning Control of Large Ships in Rough Sea Based on an Improved Closed-Loop Gain Shaping Algorithm. J. Mar. Sci. Eng. 2024, 12, 351. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Sign | Value |
| Length between perpendiculars | 320.0 | |
| Breadth | 58.0 | |
| Longitudinal center of gravity | 11.2 | |
| Rudder area | 112.26 | |
| Speed (max) | 15.8 | |
| Displacement | 312,600.0 | |
| Draft (full load) | 20.8 | |
| Block coefficient | 0.81 |
| Wind Level | Calculation of the Wind Level (kn) | Meaningful Wave Height (m) | Wave Period (s) | Second-Order Wave Transfer Function |
| No. 6 | 24.5 | 3.962 | 7.0 | |
| No. 7 | 30.5 | 7.01 | 8.7 | |
| No. 8 | 37 | 11.28 | 10.5 |
| Wind Level | Linear Feedback | Dual Nonlinear Positive Feedback | ||||||
|---|---|---|---|---|---|---|---|---|
| No.6 | 0.081 | 0.096 | 0.028 | 0.040 | 0.068 | 0.029 | 0.017 | 0.008 |
| No.7 | 0.091 | 0.113 | 0.033 | 0.047 | 0.087 | 0.058 | 0.027 | 0.021 |
| No.8 | 0.121 | 0.151 | 0.048 | 0.066 | 0.120 | 0.136 | 0.047 | 0.047 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, C.; Qiao, Q.; Sui, J. Pitching Stabilization Control for Super Large Ships Based on Double Nonlinear Positive Feedback under Rough Sea Conditions. J. Mar. Sci. Eng. 2024, 12, 1657. https://doi.org/10.3390/jmse12091657
Song C, Qiao Q, Sui J. Pitching Stabilization Control for Super Large Ships Based on Double Nonlinear Positive Feedback under Rough Sea Conditions. Journal of Marine Science and Engineering. 2024; 12(9):1657. https://doi.org/10.3390/jmse12091657
Chicago/Turabian StyleSong, Chunyu, Qi Qiao, and Jianghua Sui. 2024. "Pitching Stabilization Control for Super Large Ships Based on Double Nonlinear Positive Feedback under Rough Sea Conditions" Journal of Marine Science and Engineering 12, no. 9: 1657. https://doi.org/10.3390/jmse12091657
APA StyleSong, C., Qiao, Q., & Sui, J. (2024). Pitching Stabilization Control for Super Large Ships Based on Double Nonlinear Positive Feedback under Rough Sea Conditions. Journal of Marine Science and Engineering, 12(9), 1657. https://doi.org/10.3390/jmse12091657