
Data-Driven Approach to Safety Control in Jacket-Launching Installation Operations

Abstract
:1. Introduction
2. Calculation Theory of Launching Force and Environment of Jacket
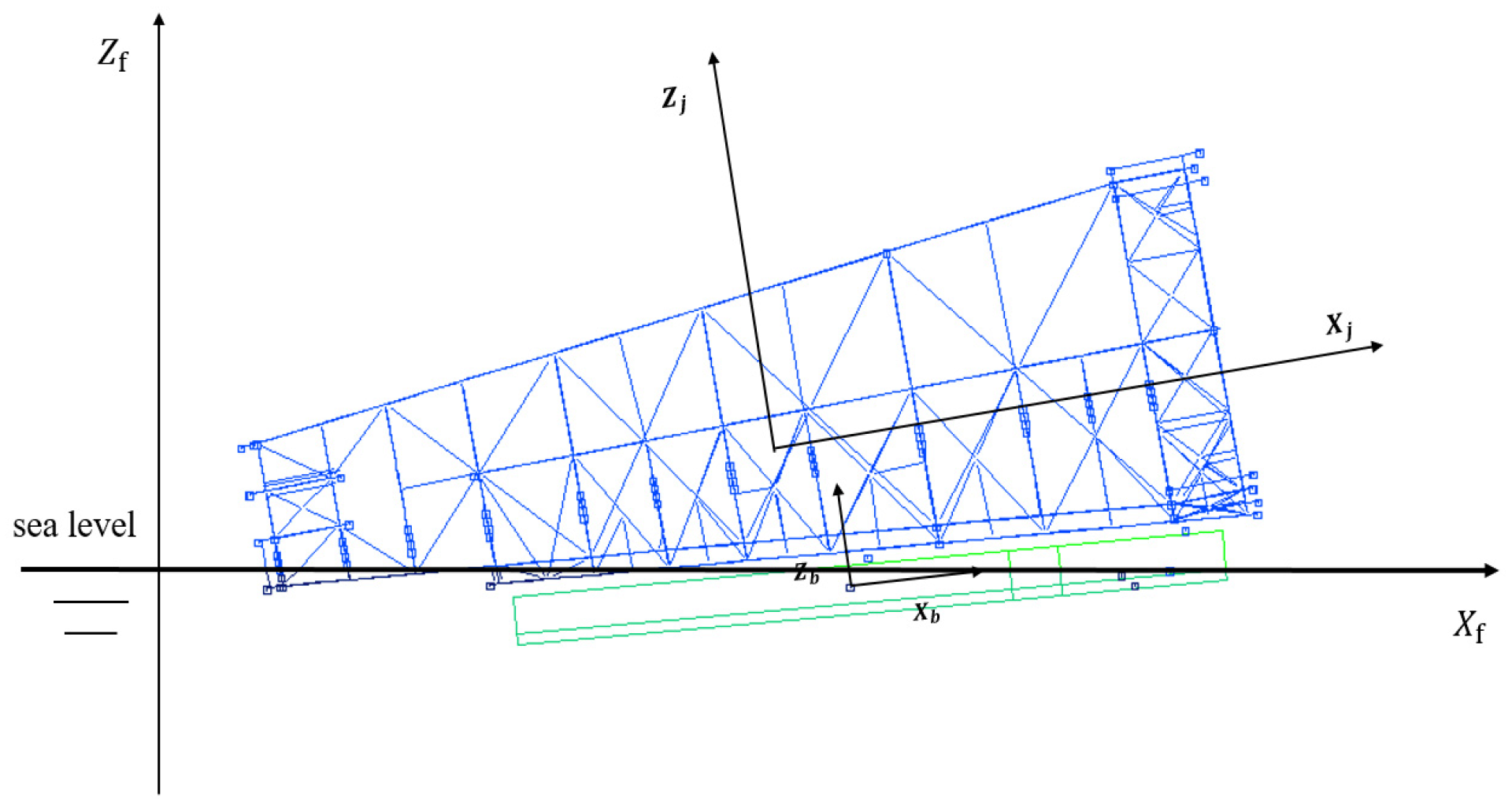
2.1. Two-Dimensional Equation of Jacket-Launching System
- (1)
- Only the motion within the vertical longitudinal plane is considered, including pitch, heave, and surge motions. Roll, sway, and yaw motions are neglected, meaning the system’s rotation around the x-axis and y-axis, as well as lateral displacement along the z-axis, are ignored.
- (2)
- Before the jacket detaches from the barge, it is assumed that the legs in contact with the barge’s skidway remain in contact at all times, with no separation occurring between the legs and the skidway.
- (3)
- The asymmetry of the jacket structure may cause asymmetrical gravitational and hydrodynamic forces, leading to barge roll and yaw motions. However, since the numerical values of these motions are relatively small, they are neglected in this analysis.
- (4)
- Wind, waves, and currents are assumed to be independent and non-interfering. The system’s oscillations in waves are considered small, and only the effects of regular waves are taken into account.
- (1)
- Initial state equation
- (2)
- The jacket movement equation when the slide movement
- (3)
- The corresponding motion equation of the jacket in the process of rocker arm flipping
- (4)
- Equation of motion for the jacket as it simultaneously rotates and slides on the rocker arm
- (5)
- Equation of movement after jacket disengagement
2.2. Selection of Rapid Forecasting Methods
3. Jacket-Launching System
3.1. Establishment of Barge and Jacket Model
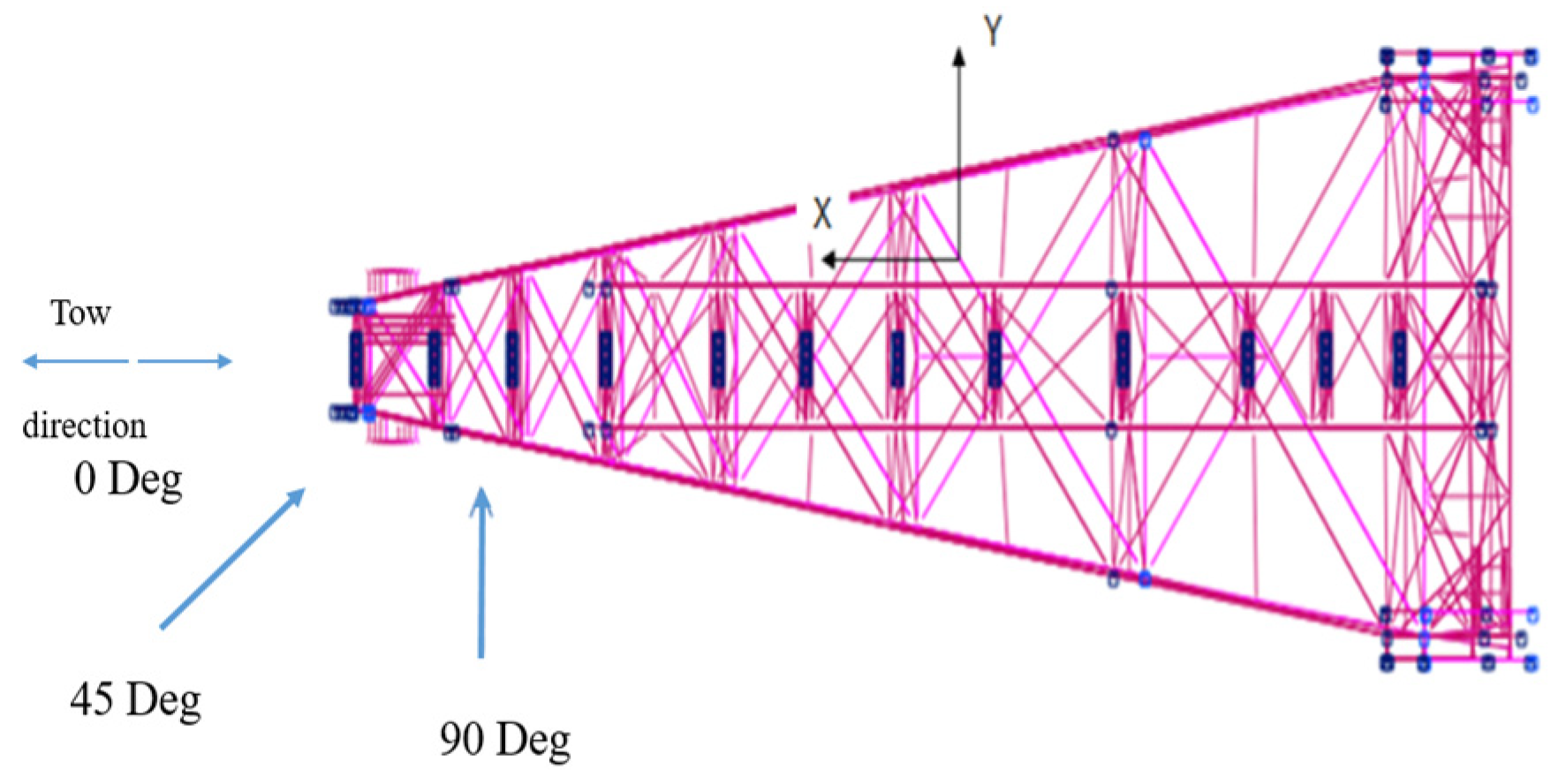
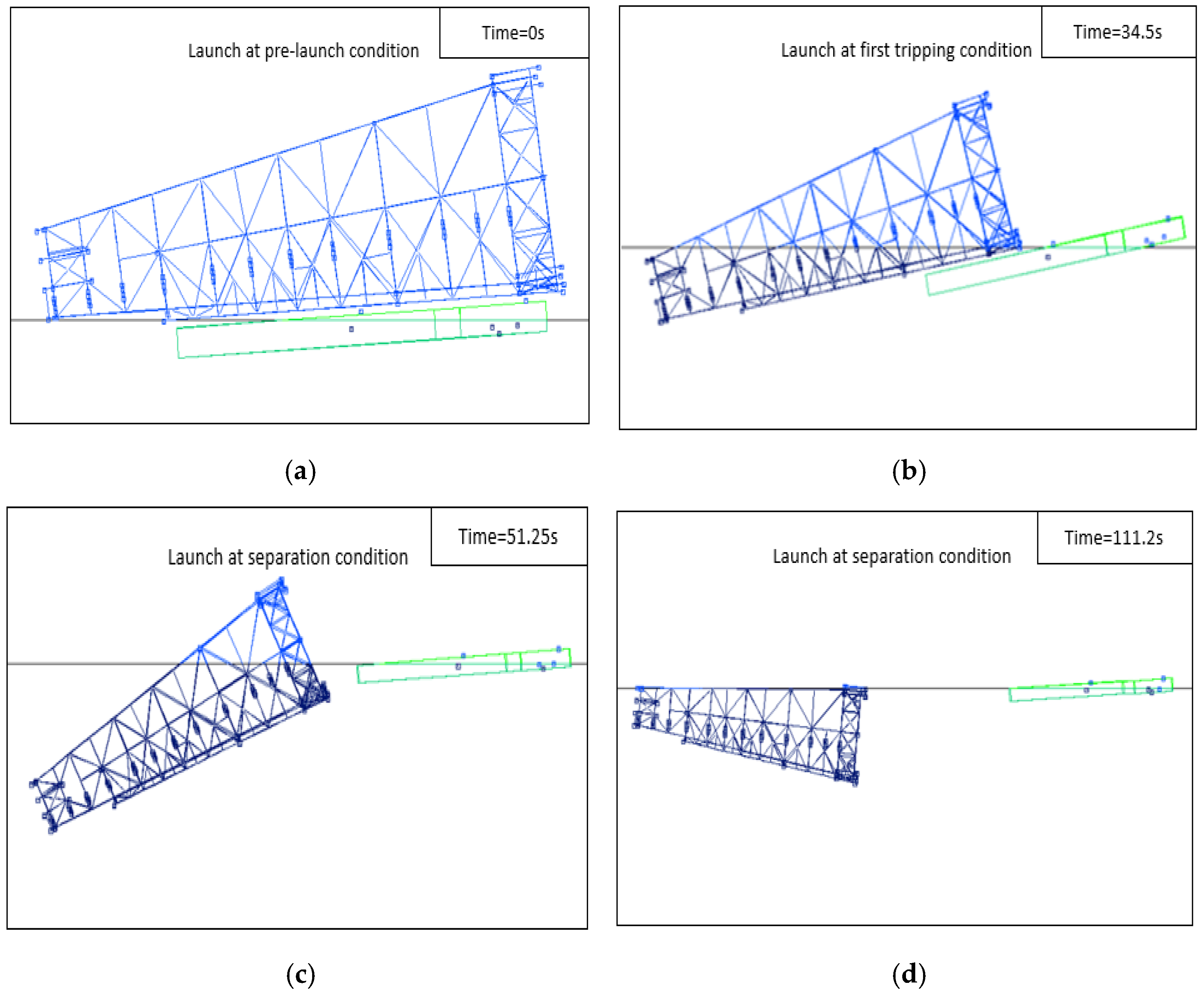
3.2. Launching Condition
4. Results Analysis
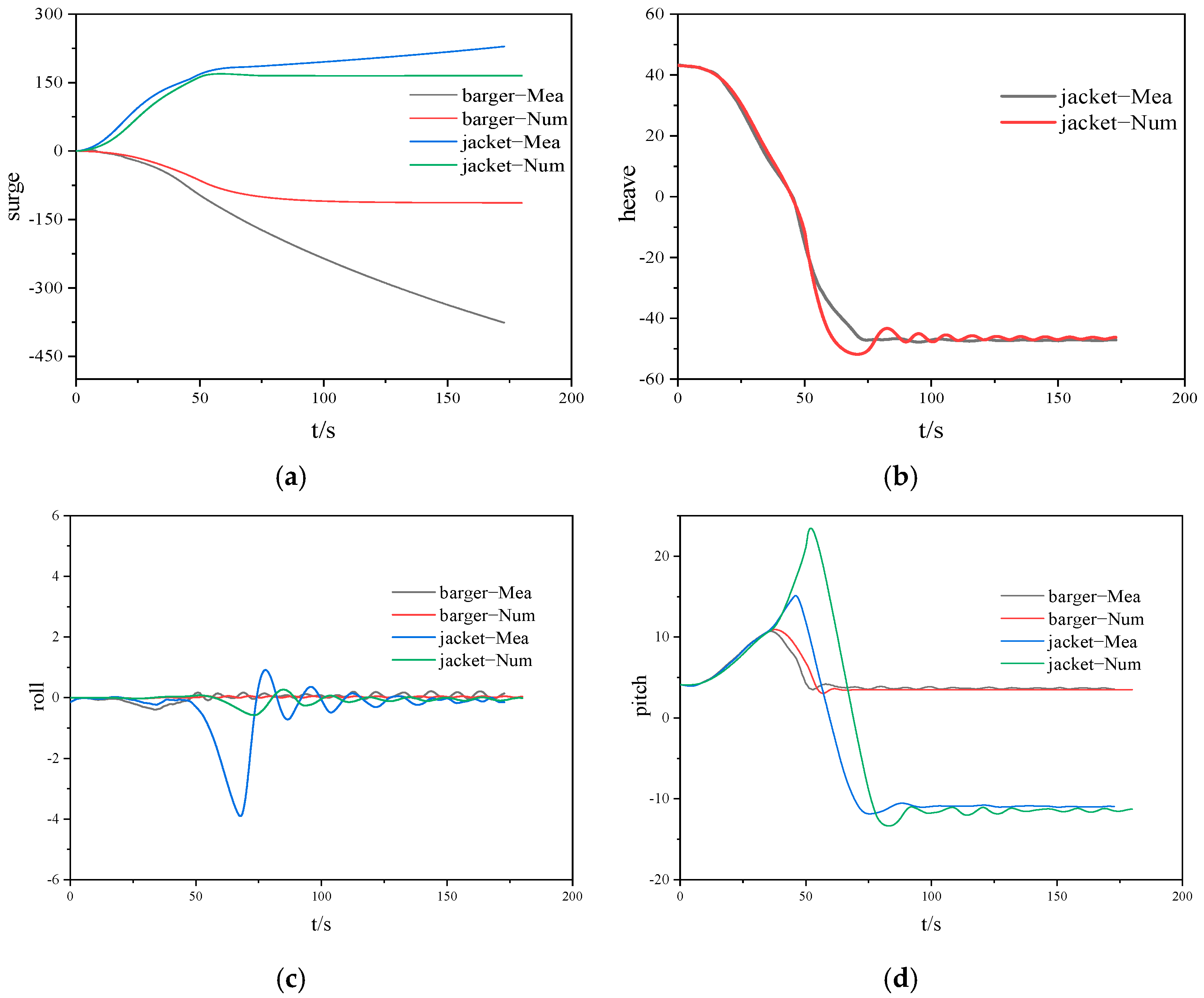
4.1. Comparative Analysis of Measured and Simulated Results of Six-Degrees-of-Freedom Motion
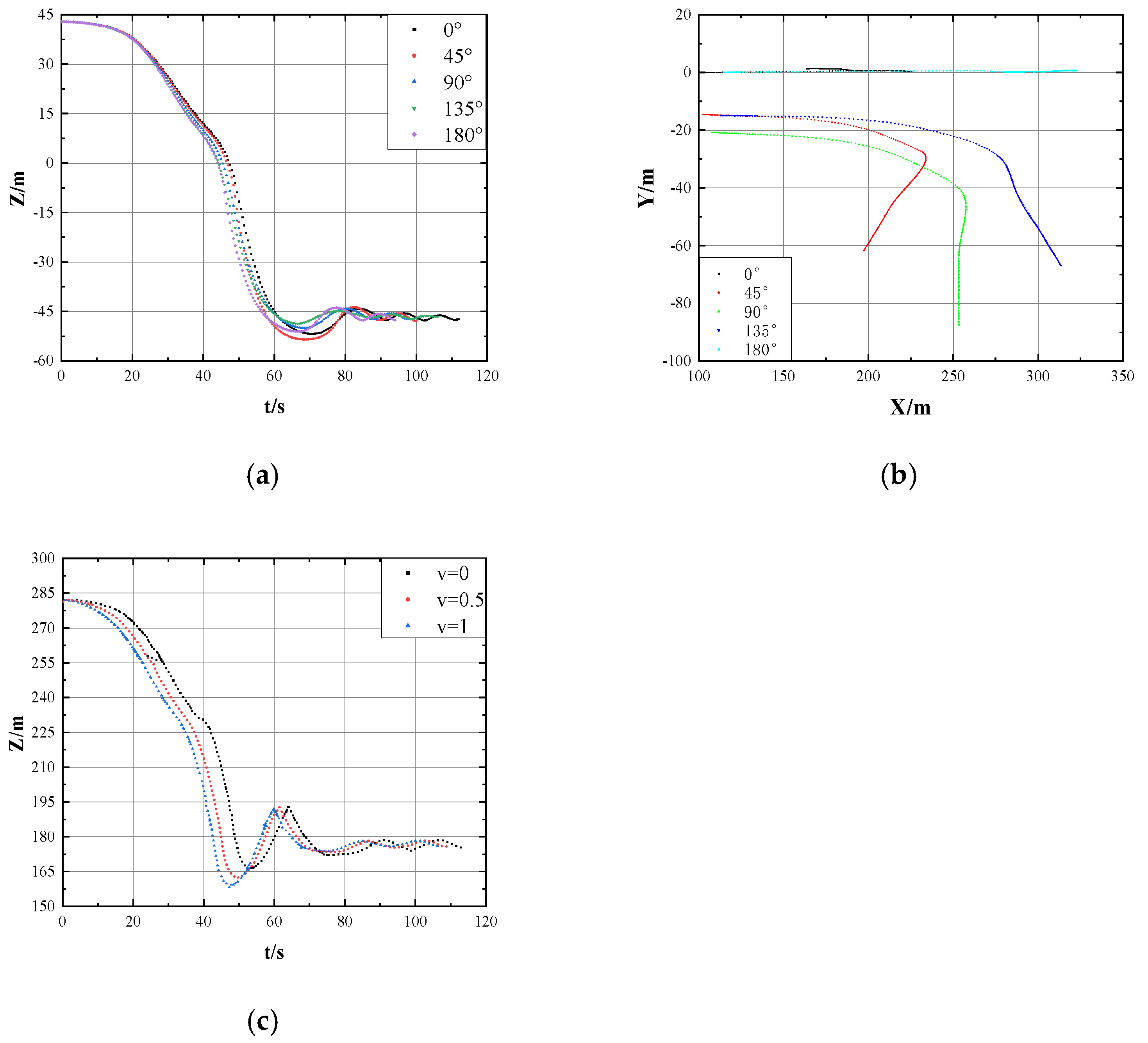
4.2. Movement Trajectories of Jacket Under Different Environmental Directions
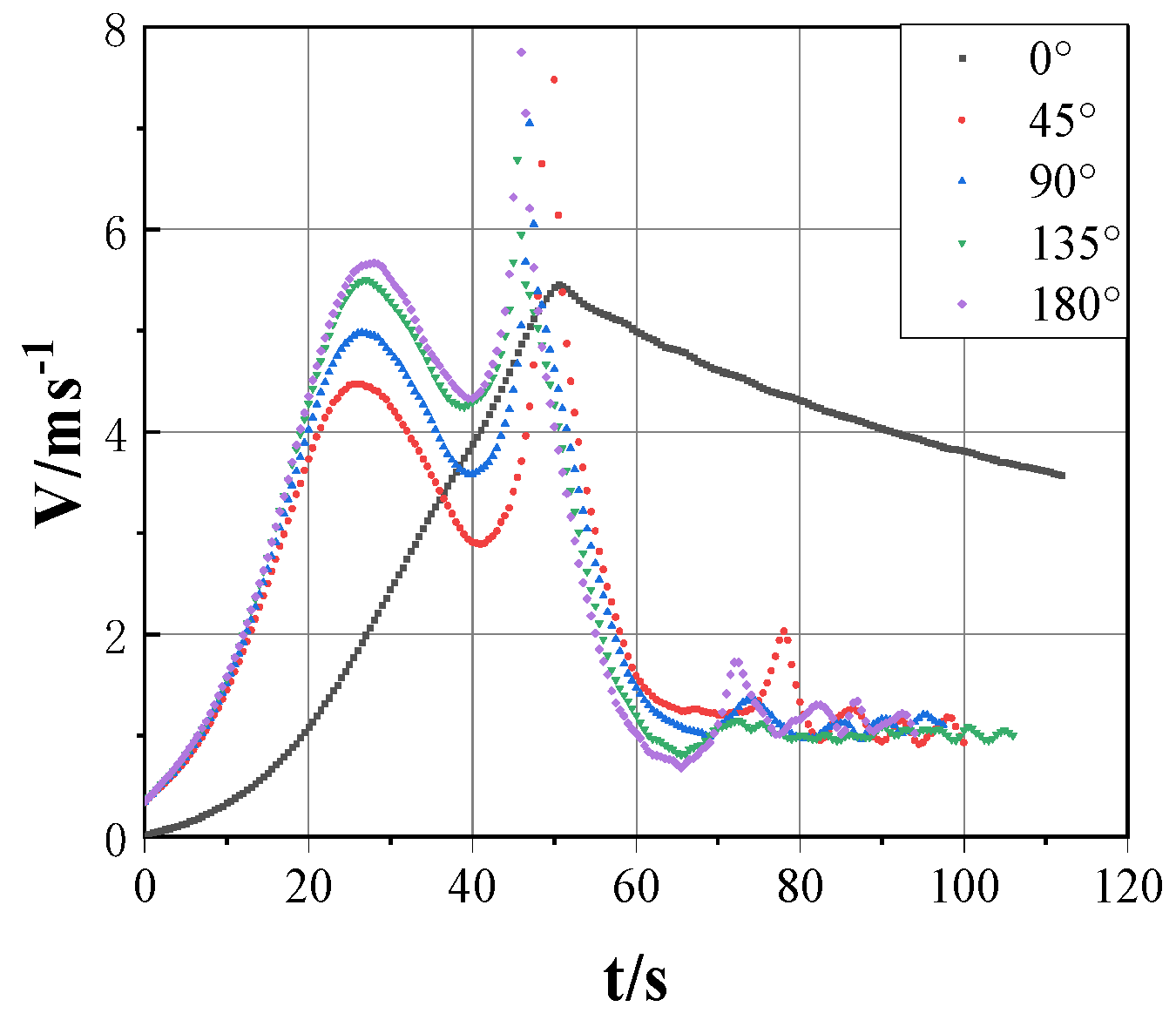
4.3. Velocity and Acceleration of Jacket-Launching Process Under Different Environmental Directions
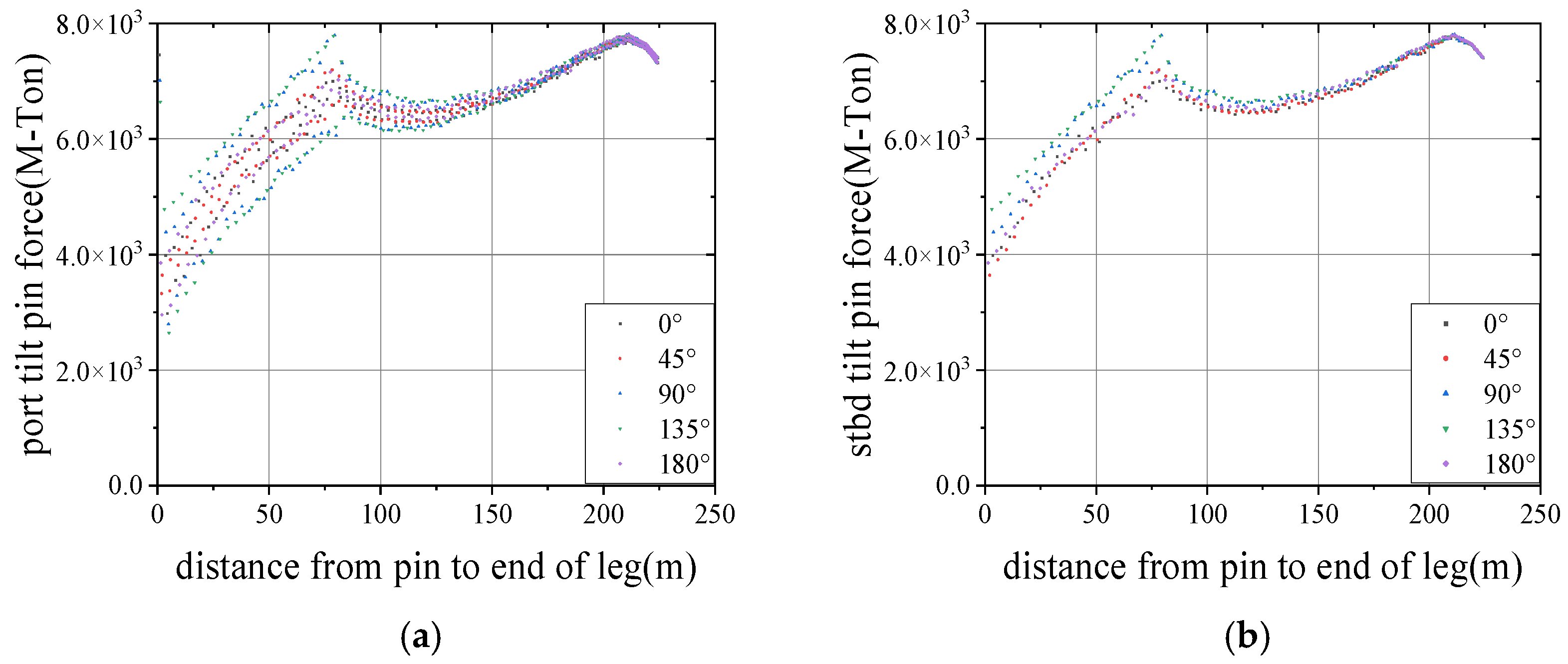
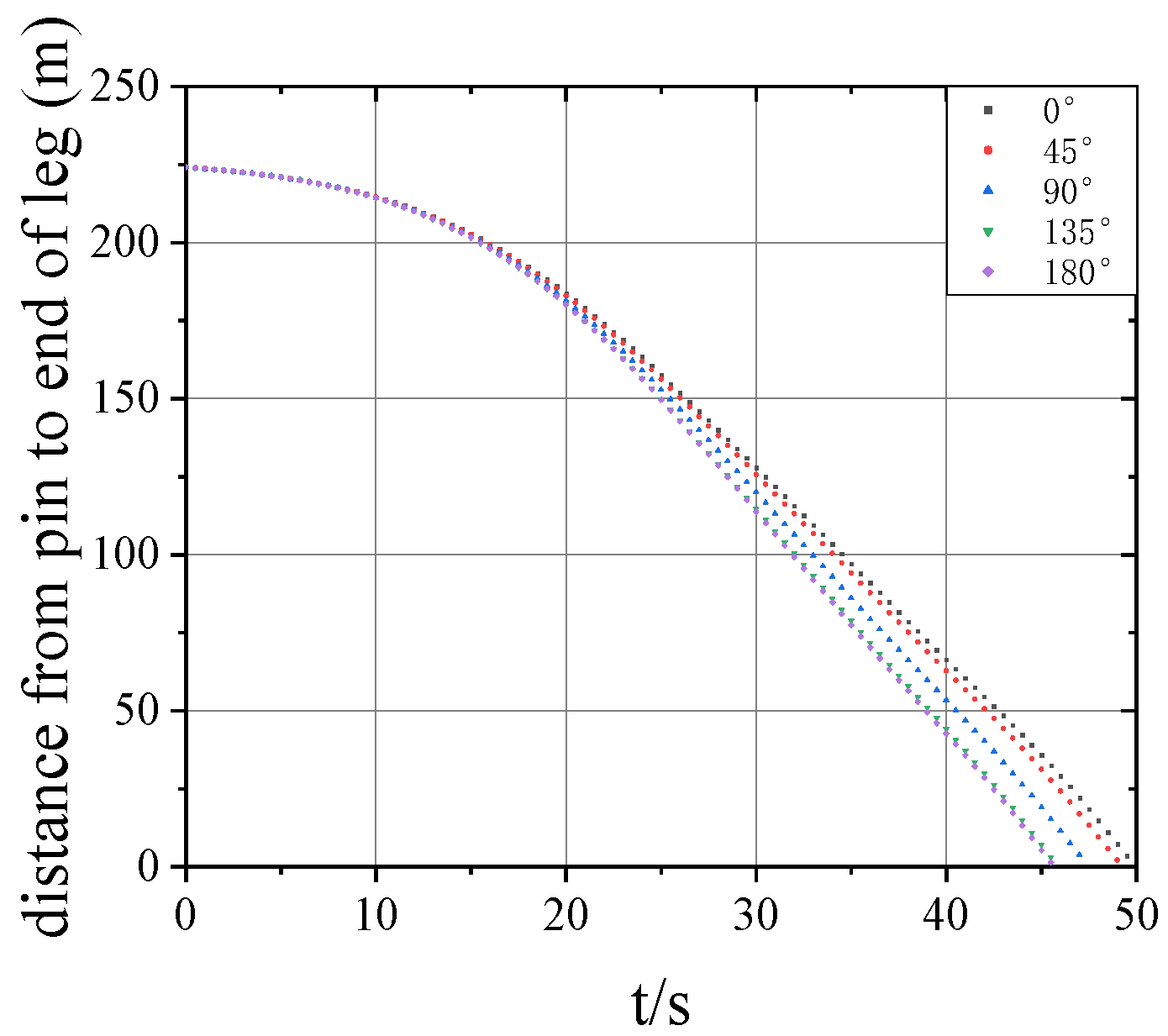
4.4. The Force of Jacket on Rocker Arm Under Different Environmental Directions
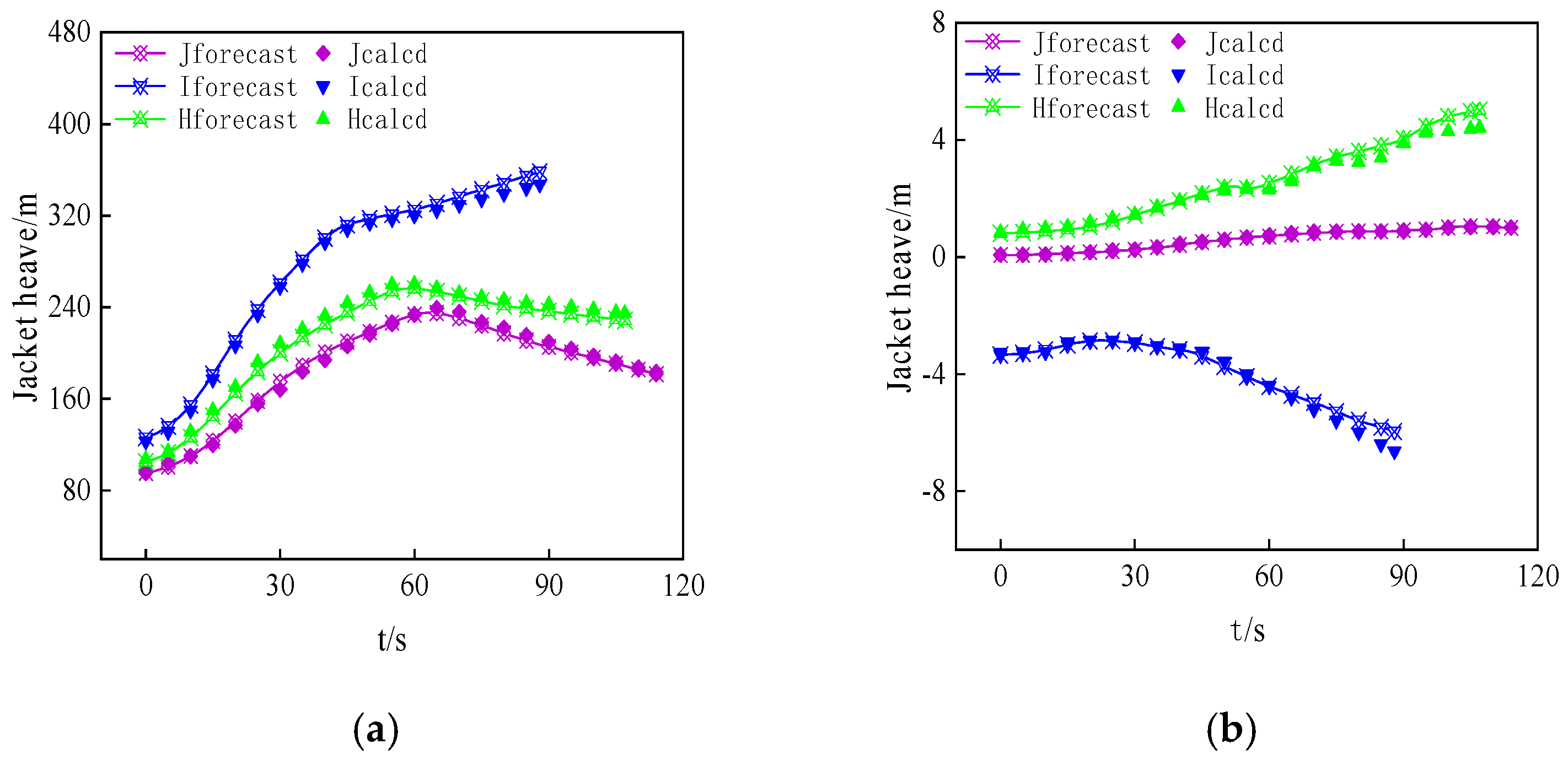
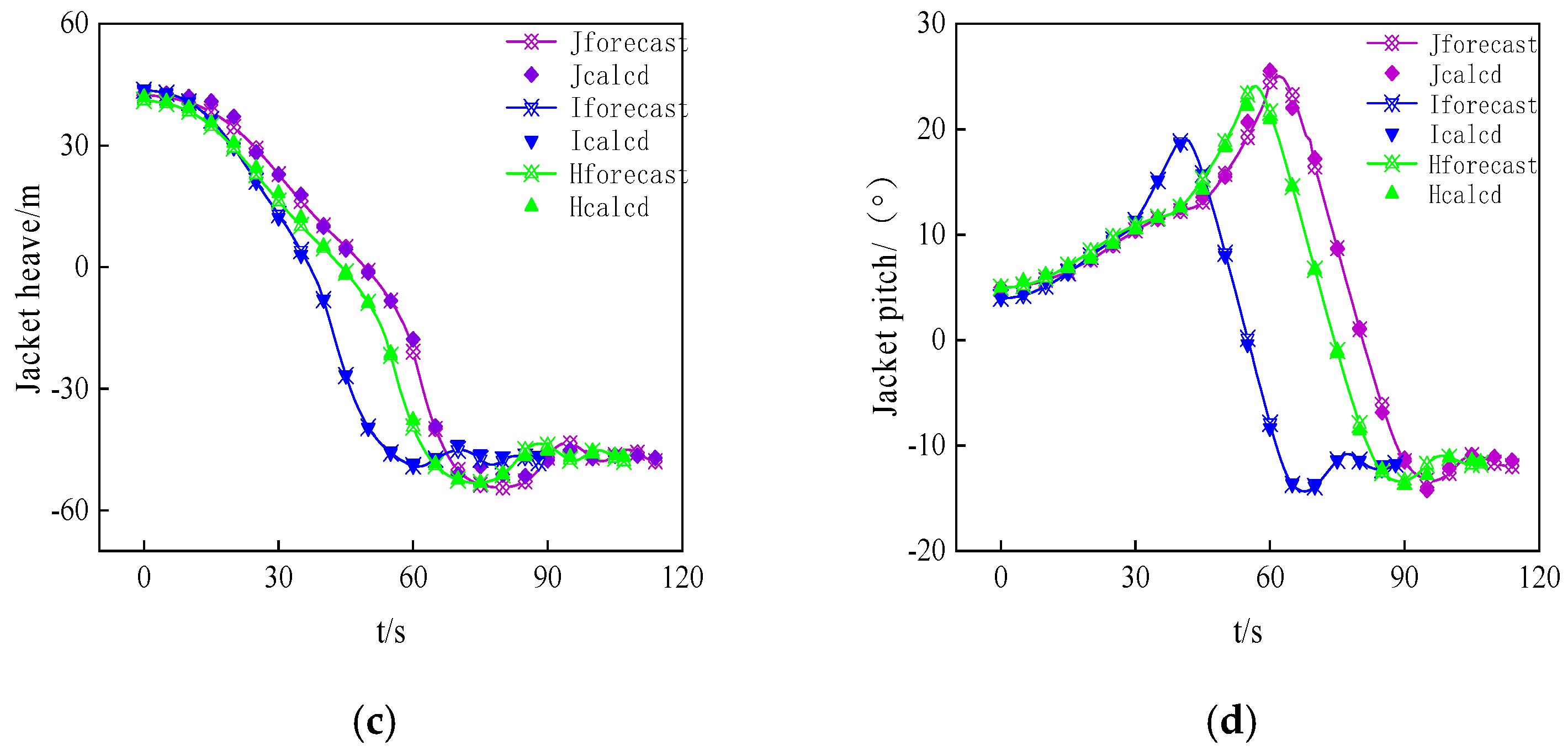
4.5. Accuracy Verification of Fast Forecasting Model
5. Conclusions
- (1)
- Environmental Impact on Jacket Behavior: Wind, wave, and current directions significantly affect loading characteristics and motion trajectories. Symmetry in rocker arm forces was observed at 0° and 180° directions, while 45°, 90°, and 135° showed increasing asymmetry. The 90° direction produced the largest force variation on the left rocker arm, raising rollover risks. Environmental directions also influenced the jacket’s center-of-gravity trajectory, with the 90° direction causing the most lateral displacement, heightening operational risks. In the vertical plane, despite temporal variations, the overall trajectory showed consistent slow descent, rapid descent, and buoyancy-driven oscillations.
- (2)
- Detachment Time and Motion Characteristics: The time for jacket detachment, as well as peak velocity and acceleration, varied under different conditions. The 0° direction exhibited a longer buildup to peak velocity due to gradual hydrodynamic forces. Upon water entry, buoyant forces decelerated the jacket’s motion, ultimately reversing its direction as buoyancy exceeded gravity.
- (3)
- Prediction Model for Sliding Launches: A rapid prediction model combining RBF and BP neural networks was developed, successfully predicting sliding termination time and 6DOF motion responses with high accuracy. The model achieved an average error of less than 5% for termination time and below 10% for motion responses (except around submersion), significantly reducing computation time to only 6.40% of traditional simulation methods, making it suitable for real-time predictions in complex operations.
- (4)
- Operational Recommendations: Operations under 90° conditions should be avoided due to high rollover risks, while 0°, 180°, or calm conditions are safer, though strong environmental loads (e.g., 0° direction) require precautions to prevent collisions between the jacket and the barge.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Saeful, M.; Paroka, D. NC3 CPP Jacket Launching Analysis by Using Numerical Simulation (Case Study of NC3 Gas Field, SK316 Block Bintulu Sarawak Malaysia). In Proceedings of the IOP Conference Series: Materials Science and Engineering, Bandung, Indonesia, 11 June 2020; IOP Publishing: Bristol, UK, 2020; p. 012072. [Google Scholar]
- Gerwick, B. Construction of Marine and Offshore Structures; CRC Press: Boca Raton, FL, USA, 2007. [Google Scholar]
- Jo, C.H.; Kim, K.S.; Lee, S. Parametric study on offshore jacket launching. Ocean Eng. 2002, 29, 1959–1979. [Google Scholar] [CrossRef]
- Honarvar, M.; Pirooz, M.D.; Bahaari, M.R. A physical and numerical modeling for launching of jackets (Case Study on Balal PLQ Platform). J. Offshore Mech. Arct. Eng. 2008, 130, 031004. [Google Scholar] [CrossRef]
- Omdehghiasi, H.; Mojtahedi, A.; Farajpour, I. A parametric stability analysis of the offshore jacket launch: A case study in the Persian Gulf. Mar. Syst. Ocean. Technol. 2018, 13, 87–102. [Google Scholar] [CrossRef]
- Mayfield, J.; Arnold, P.; Eekman, M.; Wellink, J. Installation of the bullwinkle platform. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 1–4 May 1989; OTC: Columbus, OH, USA, 1989. [Google Scholar]
- Sircar, S.; Chandra, T.; Mills, T.; Roberson, W. Transportation, launch, and self-upend analysis of the Kilauea Jacket using proven analytical techniques. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 7–10 May 1990; OTC: Columbus, OH, USA, 1990. [Google Scholar]
- Campbell, R.; Lamb, W.; Angevine, D.; Monopolis, G. Instrumentation of the SYU jackets for trans-pacific tow and launch. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 6–9 May 1991; OTC: Columbus, OH, USA, 1991. [Google Scholar]
- Vasicek, D.; Lu, C.-H. Launch and floatation analysis of offshore structures part 2–barge and jacket interaction on launch analysis. Pet. Eng. Int. 1979, 51, 10–16. [Google Scholar]
- Sphaier, S.; Vasconcellos, J.; Esperanca, P.; Ferreira, M. The study of jacket installation using INPLA system. In Proceedings of the 5th International Symposium on Offshore Engineering, Rio de Janeiro, Brazil, 16–20 September 1985. [Google Scholar]
- Jo, C.H.; Kim, K.S.; Kim, J.H.; Lee, S. Criterion of offshore jacket launching analysis. In Proceedings of the ISOPE International Ocean and Polar Engineering Conference, Kitakyushu, Japan, 25–31 May 2001. [Google Scholar]
- Xiong, L.; Yang, J.; Li, X.; Xu, X. Study on numerical simulation of jacket launching progress. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Nantes, France, 8–13 June 2013; American Society of Mechanical Engineers: New York, NY, USA, 2013. [Google Scholar]
- Sunder, S.S.; Connor, J. Sensitivity analyses for steel jacket offshore platforms. Appl. Ocean Res. 1981, 3, 13–26. [Google Scholar] [CrossRef]
- Welzel, M.; Kreklow, T.; Schlurmann, T.; Hildebrandt, A. Excitation and dynamic responses of jacket structures in regular waves for offshore installation. Coast. Eng. Proc. 2016, 2, 12. [Google Scholar] [CrossRef]
- Elshafey, A.A.; Haddara, M.R.; Marzouk, H. Dynamic response of offshore jacket structures under random loads. Mar. Struct. 2009, 22, 504–521. [Google Scholar] [CrossRef]
- Cheng, Y.; Fu, L.; Dai, S.; Collu, M.; Ji, C.; Yuan, Z.; Incecik, A. Experimental and numerical investigation of WEC-type floating breakwaters: A single-pontoon oscillating buoy and a dual-pontoon oscillating water column. Coast. Eng. 2022, 177, 104188. [Google Scholar] [CrossRef]
- Cheng, Y.; Fu, L.; Dai, S.; Collu, M.; Cui, L.; Yuan, Z.; Incecik, A. Experimental and numerical analysis of a hybrid WEC-breakwater system combining an oscillating water column and an oscillating buoy. Renew. Sustain. Energy Rev. 2022, 169, 112909. [Google Scholar] [CrossRef]
- Cheng, Y.; Liu, W.; Dai, S.; Yuan, Z.; Incecik, A. Wave energy conversion by multi-mode exciting wave energy converters arrayed around a floating platform. Energy 2024, 313, 133621. [Google Scholar] [CrossRef]
- Mi, C.-L.; Gao, J.-L.; Song, Z.-W.; Yan, M.-Y. Gap resonance between a stationary box and a vertical wall induced by transient focused wave groups. In China Ocean Engineering; Springer: Berlin/Heidelberg, Germany, 2025; pp. 1–14. [Google Scholar]
- Gong, S.; Gao, J.; Yan, M.; Song, Z.; Shi, H. Effects of floater motion on wave loads during steady-state gap resonance occurring between two non-identical boxes. Ocean. Eng. 2025, 323, 120649. [Google Scholar] [CrossRef]
- Mi, C.; Gao, J.; Song, Z.; Liu, Y. Hydrodynamic wave forces on two side-by-side barges subjected to nonlinear focused wave groups. Ocean. Eng. 2025, 317, 120056. [Google Scholar] [CrossRef]
- Li, M.; Yuan, Z.-M.; Tao, L. Wash waves generated by ship moving across a depth change. Ocean Eng. 2023, 275, 114073. [Google Scholar] [CrossRef]
- Li, M.-X.; Yuan, Z.-M.; Bai, X.; Li, Y.-Z.; Cheng, Y.; Tao, L.-B. Numerical modelling of wash waves generated by ships moving over an uneven bottom. China Ocean Eng. 2023, 37, 145–153. [Google Scholar] [CrossRef]
- Li, M.; Pan, S.; Cheng, Y.; Yuan, Z.-M.; Tao, L. Time-domain numerical simulation for multi-ships moving in waves with forward speed. Ocean Eng. 2023, 290, 116325. [Google Scholar] [CrossRef]
- Li, M.-X.; Yuan, Z.-M.; Tao, L. An iterative time-marching scheme for the investigation of hydrodynamic interaction between multi-ships during overtaking. J. Hydrodyn. 2021, 33, 468–478. [Google Scholar] [CrossRef]
- Gomes, L.K.; Naik, M. Detection of damage in offshore jacket structure using artificial neural network. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2023; Volume 1130, p. 012027. [Google Scholar]
- Hahnloser, R.H.R.; Sarpeshkar, R.; Mahowald, M.A.; Douglas, R.J.; Seung, H.S. Digital selection and analogue amplification coexist in a cortex-inspired silicon circuit. Nature 2000, 405, 947–951. [Google Scholar] [CrossRef] [PubMed]
- Reina, R.Q.; Álamo, G.M.; Aznárez, J.J. Global Sensitivity Analysis of the Fundamental Frequency of Jacket-Supported Offshore Wind Turbines Using Artificial Neural Networks. J. Mar. Sci. Eng. 2024, 12, 2011. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Symbol | Unit | Value |
|---|---|---|---|
| Length overall | m | 215 | |
| Breadth (Forebody/Afrbody) | m | 42.5/65.0 | |
| Depth | D | m | 14.25 |
| Lightship weight | MT | 32,616.45 | |
| VCG above keel | m | 8.19 | |
| LCG aft of the bow | m | 113.52 | |
| Roll radii of gyration | m | 19.072 | |
| Pitch radii of gyration | m | 62.35 | |
| Yaw radii of gyration | m | 62.35 | |
| Skidway height | m | 2.035 | |
| Rocker arm length | m | 24.65 |
| Parameter | Range | Parameter | Range |
|---|---|---|---|
| Draft/m | 8.00~12.00 | Flow speed/(m·s−1) | 0.50~1.00 |
| Angle of trim/(°) | 3.00~5.00 | Regular wave height/m | 0.50~2.50 |
| Friction coefficient | 0.03~0.07 | regular wave period/s | 1.00~9.00 |
| Wind speed/(m·s−1) | 4.00~12.00 | Wind and wave speed (m·s−1) | 0.00~5.00 175.00~185.00 355.00~360.00 |
| Condition | F | H | J |
|---|---|---|---|
| Draft/m | 8.00 | 10.00 | 12.00 |
| Trim angle/(°) | 5.00 | 4.00 | 5.00 |
| Friction coefficient | 0.07 | 0.04 | 0.06 |
| Wind speed/(m·s−1) | 10.00 | 12.00 | 6.00 |
| Flow speed/(m·s−1) | 1.00 | 1.00 | 0.50 |
| Regular wave height/m | 2.00 | 2.50 | 1.00 |
| Regular wave period/s | 7.00 | 9.00 | 3.00 |
| Wind, waves, and Current angle/(°) | 0.00 | 175.00 | 355.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, S.; Li, M.; Liu, Y.; Bai, X. Data-Driven Approach to Safety Control in Jacket-Launching Installation Operations. J. Mar. Sci. Eng. 2025, 13, 554. https://doi.org/10.3390/jmse13030554
Chen S, Li M, Liu Y, Bai X. Data-Driven Approach to Safety Control in Jacket-Launching Installation Operations. Journal of Marine Science and Engineering. 2025; 13(3):554. https://doi.org/10.3390/jmse13030554
Chicago/Turabian StyleChen, Sheng, Mingxin Li, Yankun Liu, and Xu Bai. 2025. "Data-Driven Approach to Safety Control in Jacket-Launching Installation Operations" Journal of Marine Science and Engineering 13, no. 3: 554. https://doi.org/10.3390/jmse13030554
APA StyleChen, S., Li, M., Liu, Y., & Bai, X. (2025). Data-Driven Approach to Safety Control in Jacket-Launching Installation Operations. Journal of Marine Science and Engineering, 13(3), 554. https://doi.org/10.3390/jmse13030554