
Experimental Study on the Hole-Forming Process at the Borehole Bottom During Hot Water Drilling in Ice and Its Influence Mechanisms

 ,
,
Abstract
:1. Introduction
2. Experimental Methods
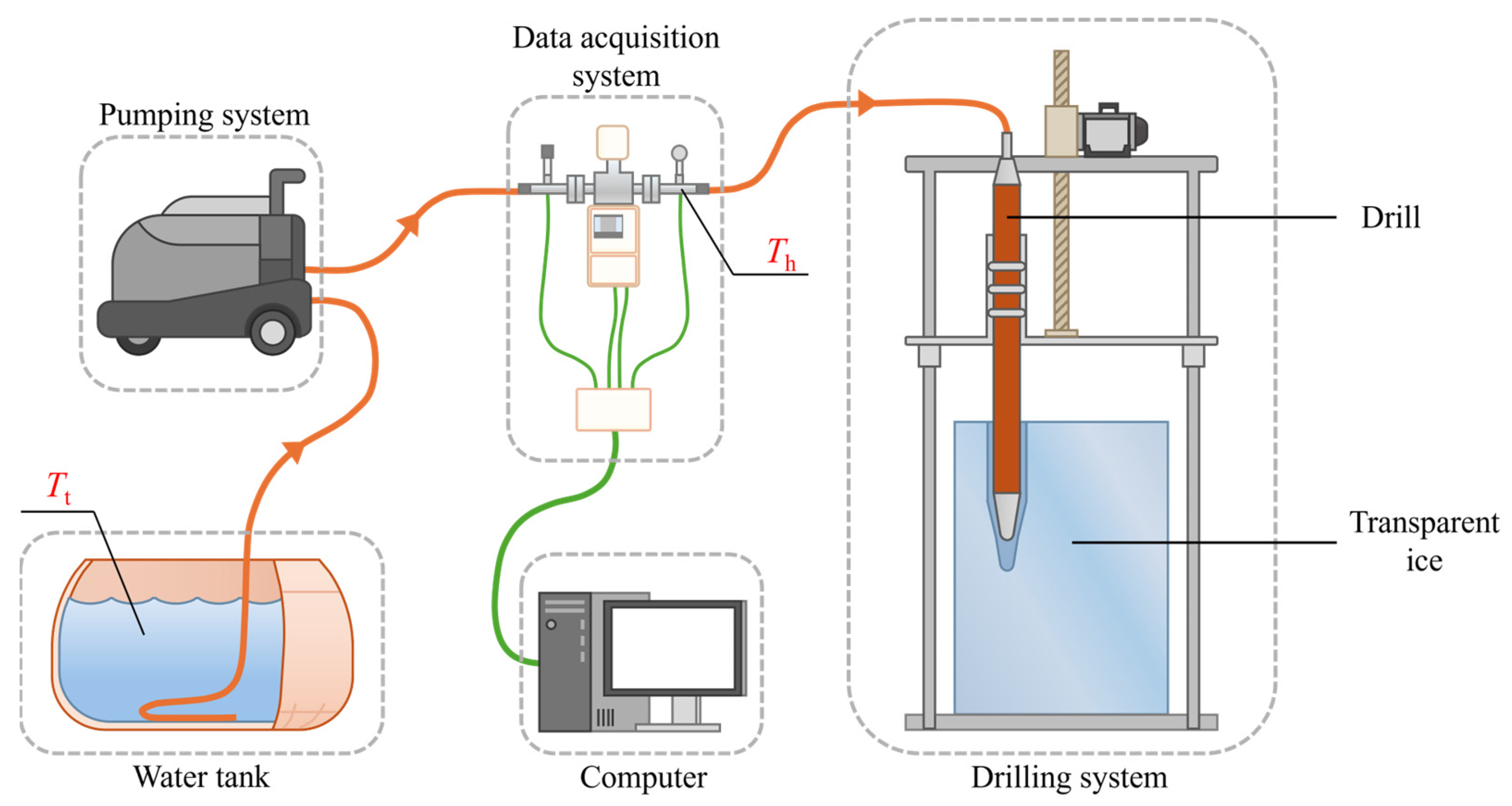
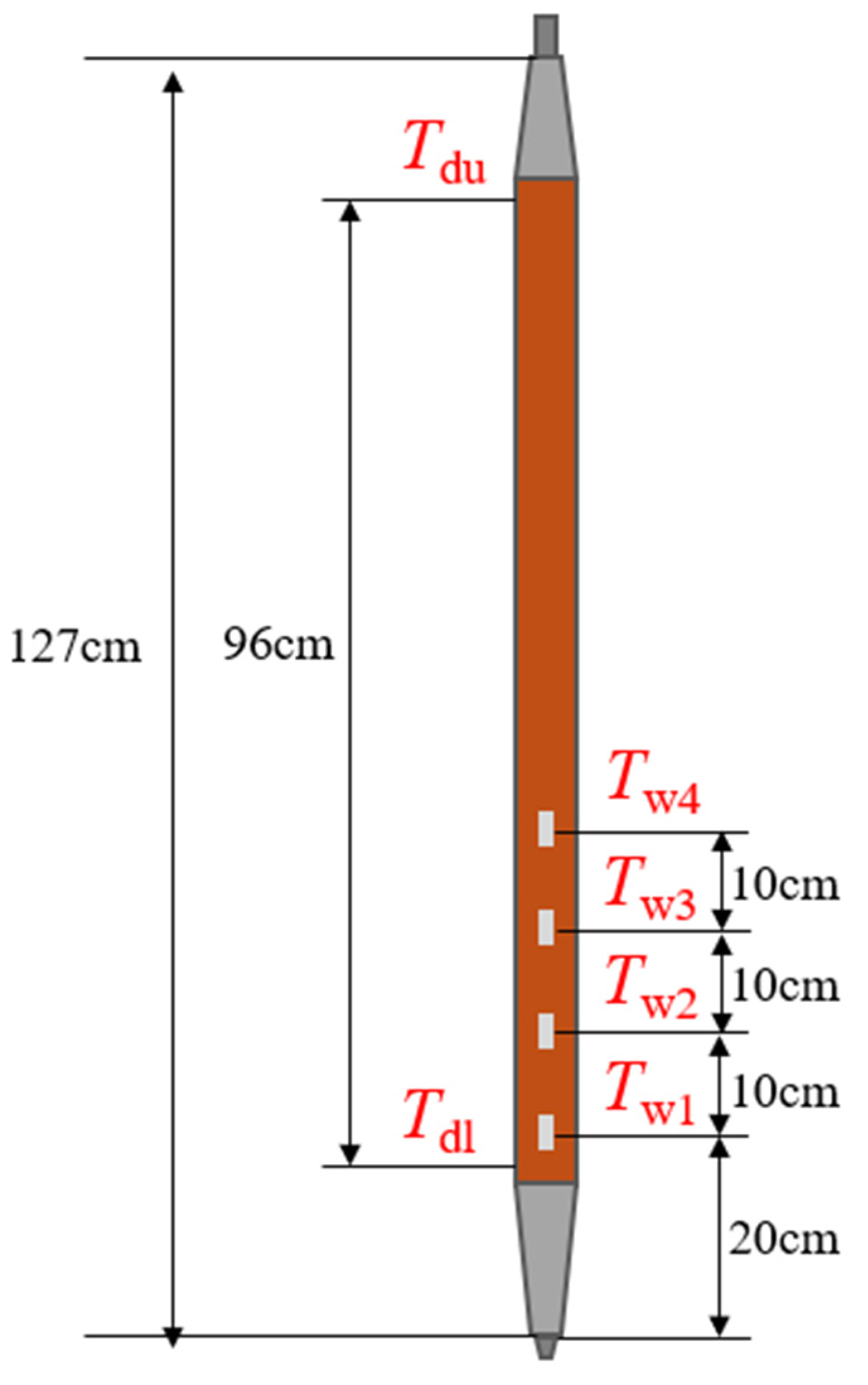
2.1. Experimental Platform
2.2. Experimental Plan
2.3. Experimental Procedure and Data Processing Methods
3. Results and Discussion
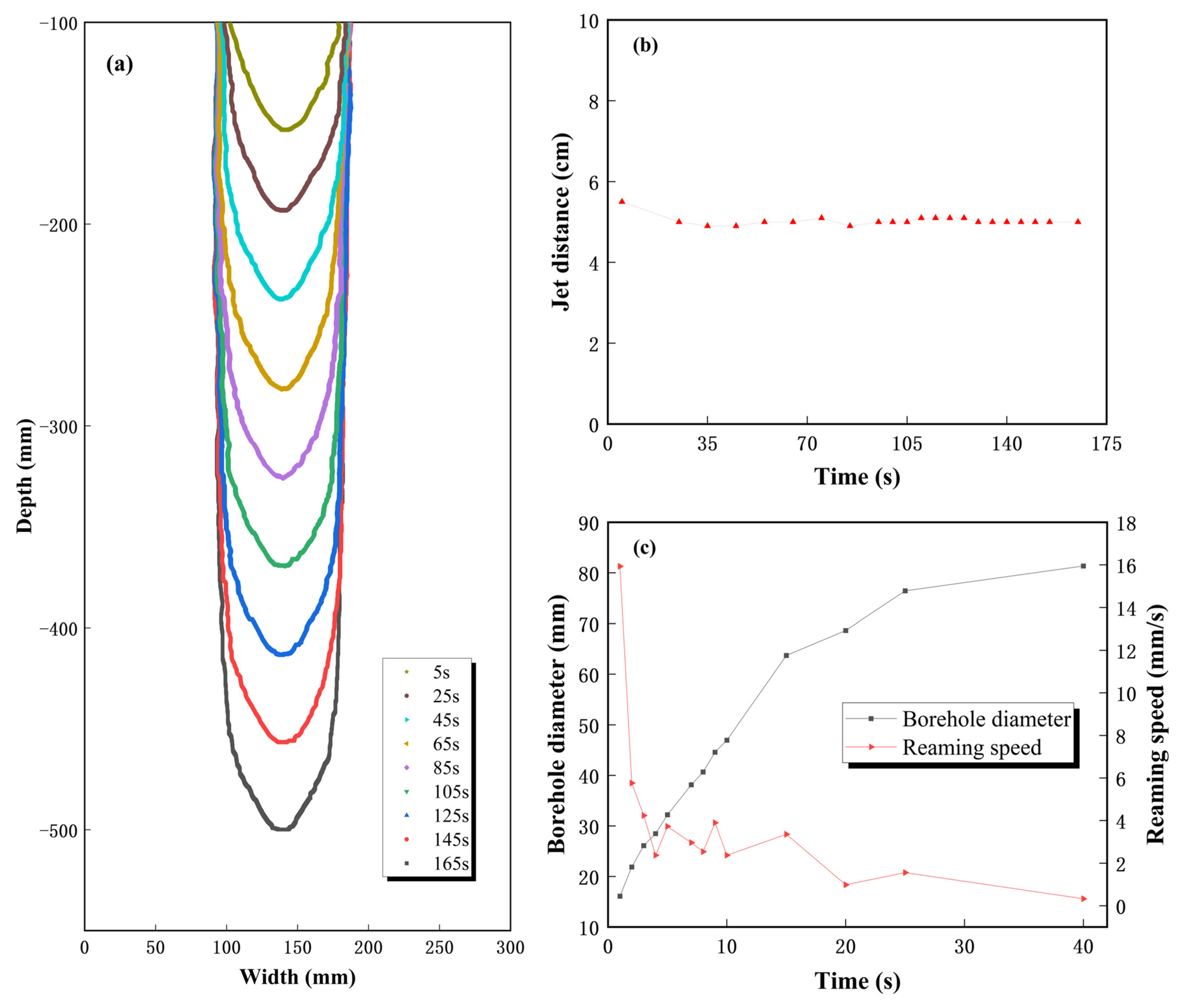
3.1. Analysis of Ice Melting Process at Borehole Bottom
3.2. Influence of Structural Parameters on Hot Water Borehole Geometry
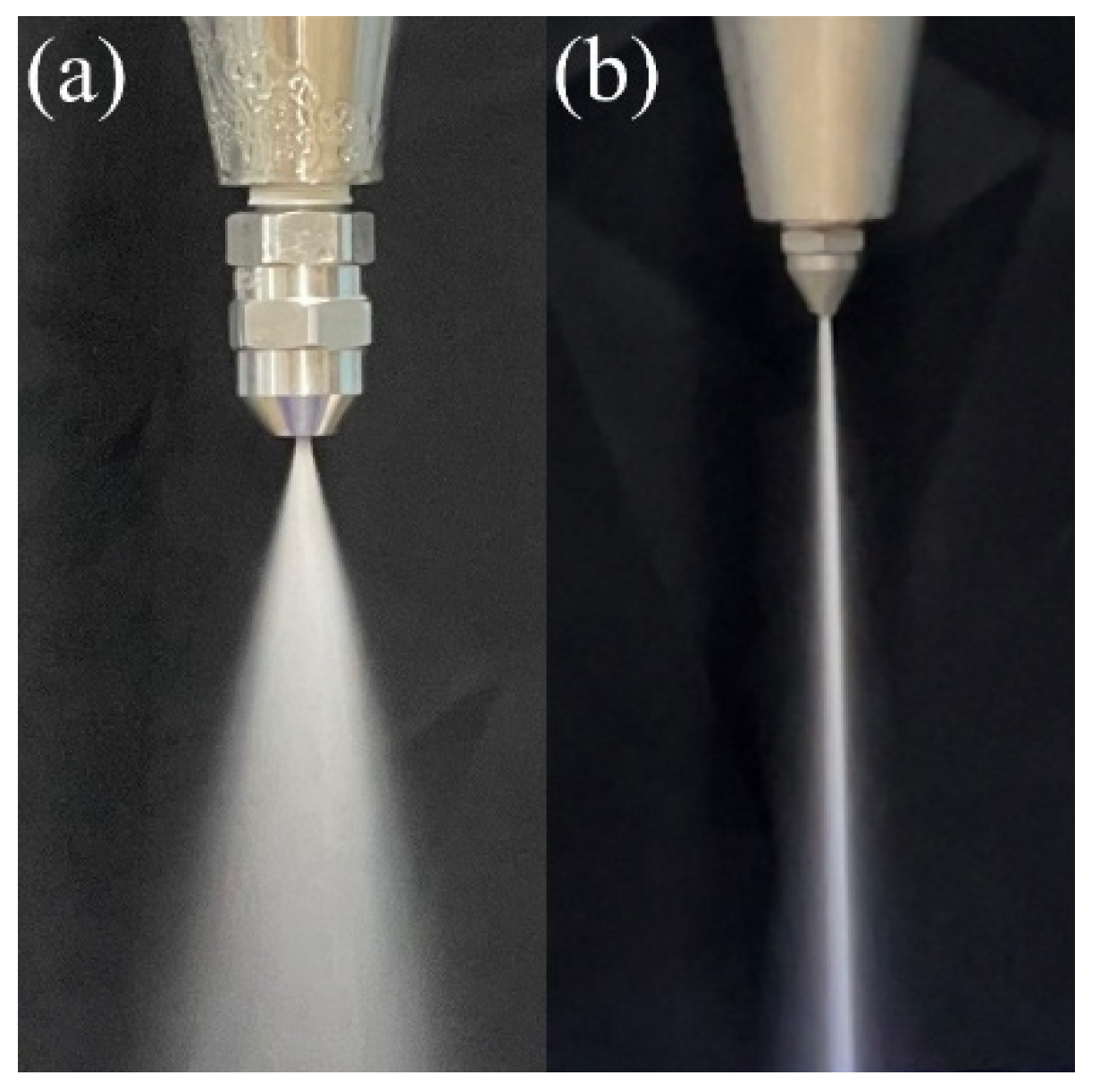
3.2.1. Jet Shape
3.2.2. Jet Velocity
3.2.3. Extension Rods
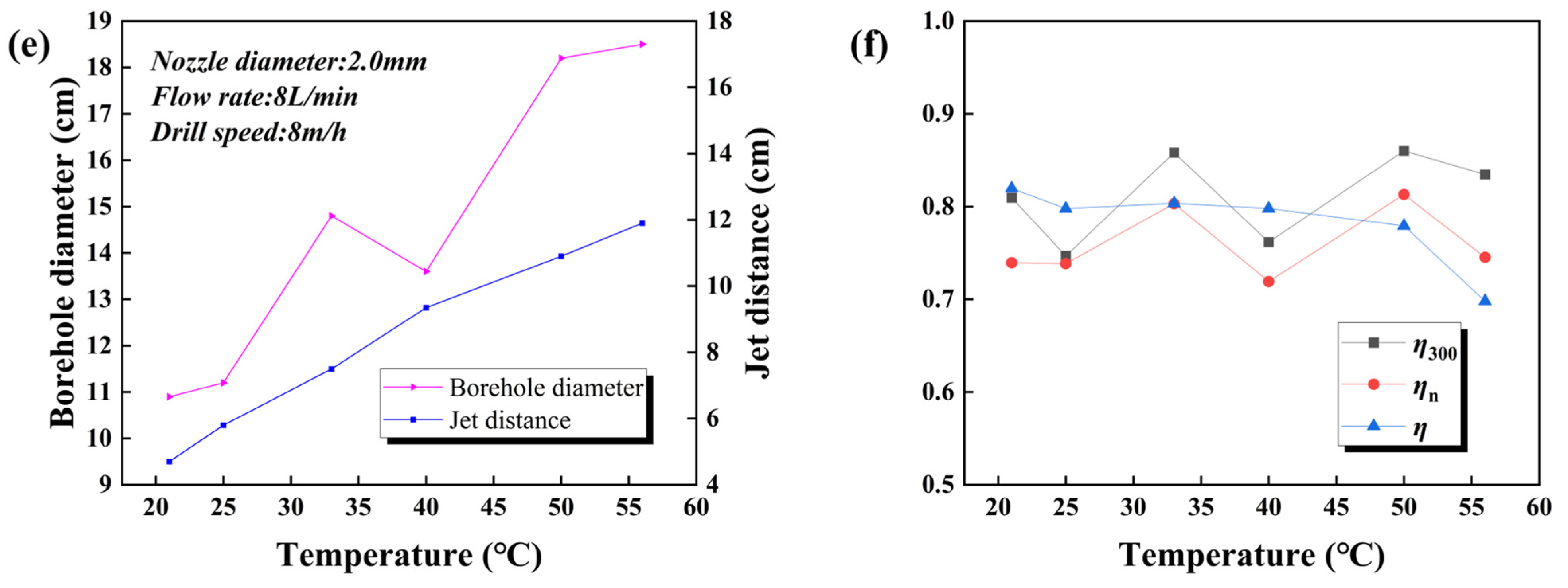
3.3. Influence of Drilling Parameters on Hot-Water Borehole Geometry
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Talalay, P.G. Thermal Ice Drilling Technology; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Ashmore, D.W.; Hubbard, B.; Luckman, A.; Kulessa, B.; Bevan, S.; Booth, A.; Munneke, P.K.; O’leary, M.; Sevestre, H.; Holland, P.R. Ice and firn heterogeneity within Larsen C Ice Shelf from borehole optical televiewing. J. Geophys. Res. Earth Surf. 2017, 122, 1139–1153. [Google Scholar] [CrossRef]
- Hubbard, B.; Luckman, A.; Ashmore, D.W.; Bevan, S.; Kulessa, B.; Kuipers Munneke, P.; Philippe, M.; Jansen, D.; Booth, A.; Sevestre, H.; et al. Massive subsurface ice formed by refreezing of ice-shelf melt ponds. Nat. Commun. 2016, 7, 11897. [Google Scholar] [CrossRef] [PubMed]
- Roberson, S.; Hubbard, B. Application of borehole optical televiewing to investigating the 3-D structure of glaciers: Implications for the formation of longitudinal debris ridges, midre Lovénbreen, Svalbard. J. Glaciol. 2010, 56, 143–156. [Google Scholar] [CrossRef]
- Andrews, L.C.; Catania, G.A.; Hoffman, M.J.; Gulley, J.D.; Lüthi, M.P.; Ryser, C.; Hawley, R.L.; Neumann, T.A. Direct observations of evolving subglacial drainage beneath the Greenland Ice Sheet. Nature 2014, 514, 80–83. [Google Scholar] [CrossRef] [PubMed]
- Patterson, M.O.; Levy, R.H.; Kulhanek, D.K.; van de Flierdt, T.; Horgan, H.; Dunbar, G.B.; Naish, T.R.; Ash, J.; Pyne, A.; Mandeno, D.; et al. Sensitivity of the West Antarctic Ice Sheet to +2 °C (SWAIS 2C). Sci. Drill. 2022, 30, 101–112. [Google Scholar] [CrossRef]
- Church, G.; Bauder, A.; Grab, M.; Rabenstein, L.; Singh, S.; Maurer, H. Detecting and characterising an englacial conduit network within a temperate Swiss glacier using active seismic, ground penetrating radar and borehole analysis. Ann. Glaciol. 2019, 60, 193–205. [Google Scholar] [CrossRef]
- McKay, R.; Barrett, P.; Levy, R. Antarctic Cenozoic climate history from sedimentary records: ANDRILL and beyond. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2015, 374, 20140301. [Google Scholar] [CrossRef] [PubMed]
- Falconer, T.; Pyne, A.; Wilson, D.; Levy, R.; Nielsen, S.; Petrushak, S.; ANDRILL-SMS Science Team. Operations overview for the ANDRILL Southern McMurdo Sound Project, Antarctica. Terra Antart. 2009, 15, 41–48. [Google Scholar]
- Hantz, D.; Lliboutry, L. Water ways, ice permeability at depth, and water pressures at Glacier D’Argentiere, French Alps. J. Glaciol. 1983, 29, 227–239. [Google Scholar] [CrossRef]
- Rado, C.; Girard, C.; Perrin, J. Electrochaude: A self-flushing hot-water drilling apparatus for glaciars with debris. J. Glaciol. 1987, 33, 236–238. [Google Scholar] [CrossRef]
- Olesen, O.B. A Danish contribution to the family of hot-water glacier drills. In Ice Core Drilling. Proceedings of the Third International Workshop on Ice Drilling Technology, Grenoble, France, 10–14 October 1988; Rado, C., Beaudoing, D., Eds.; Laboratoire de Glaciologie et Geophysique de l’Environnement: Grenoble, France, 1989; pp. 140–148. [Google Scholar]
- Benson, T.; Cherwinka, J.; Duvernois, M.; Elcheikh, A.; Feyzi, F.; Greenler, L.; Haugen, J.; Karle, A.; Mulligan, M.; Paulos, R. IceCube enhanced hot water drill functional description. Ann. Glaciol. 2014, 55, 105–114. [Google Scholar] [CrossRef]
- Gaisser, T. IceCube. Annu. Rev. Nucl. Part. Sci. 2014, 64, 101–123. [Google Scholar] [CrossRef]
- Rack, F.R. Enabling clean access into Subglacial Lake Whillans: Development and use of the WISSARD hot water drill system. Phil. Trans. R Soc. A 2016, 374, 20140305. [Google Scholar] [CrossRef] [PubMed]
- Siegert, M.J.; Clarke, R.J.; Mowlem, M.; Ross, N.; Hill, C.S.; Tait, A.; Hodgson, D.; Parnell, J.; Tranter, M.; Pearce, D.; et al. Clean access, measurement, and sampling of Ellsworth Subglacial Lake: A method for exploring deep Antarctic subglacial lake environments. Rev. Geophys. 2012, 50, RG1003. [Google Scholar] [CrossRef]
- Priscu, J.C.; Kalin, J.; Winans, J.; Campbell, T.; Siegfried, M.R.; Skidmore, M.; Dore, J.E.; Leventer, A.; Harwood, D.M.; Duling, D.; et al. Scientific access into Mercer Subglacial Lake: Scientific objectives, drilling operations and initial observations. Ann. Glaciol. 2021, 62, 340–352. [Google Scholar] [CrossRef]
- Sun, Y.; Li, B.; Fan, X.; Li, Y.; Li, G.; Yu, H.; Li, H.; Wang, D.; Zhang, N.; Gong, D.; et al. Brief communication: New sonde to unravel the mystery of polar subglacial lakes. Cryosphere 2023, 17, 1089–1095. [Google Scholar] [CrossRef]
- Taylor, P.L. A hot water drill for temperate ice. In Proceedings of the Second International Workshop/Symposium on Ice Drilling Technology, Calgary, AB, Canada, 30–31 August 1982; Holdsworth, G., Kuivinen, K.C., Rand, J.H., Eds.; CRREL Special Report. US Army Cold Regions Research and Engineering Laboratory: Hanover, NH, USA, 1984; pp. 105–117. [Google Scholar]
- Thorsteinsson, T.; Elefsen, S.Ó.; Gaidos, E.; Lanoil, B.; Jóhannesson, T.; Kjartansson, V.; Marteinsson, V.T.; Stefánsson, A.; Thorsteinsson, T. A hot water drill with built-in sterilization: Design, testing and performance. Jökull 2007, 57, 71–82. [Google Scholar] [CrossRef]
- Liu, G.; Talalay, P.; Wang, R.; Yang, Y.; Hong, J.; Gong, D.; Liu, A.; Fan, D. Design Parameters of Hot-Water Drilling Systems. Water 2019, 11, 289. [Google Scholar] [CrossRef]
- Greenler, L.; Benson, T.; Cherwinka, J.; Elcheikh, A.; Feyzi, F.; Karle, A.; Paulos, R. Modeling hole size, lifetime and fuel consumption in hot-water ice drilling. Ann. Glaciol. 2014, 55, 115–123. [Google Scholar] [CrossRef]
- Zhao, G.; Talalay, P.G.; Fan, X.; Zhang, N.; Liu, Y.; Wang, T.; Chen, Y. Optimization of Hot-Water Drilling in Ice with Near-Bottom Circulation. Water 2022, 14, 127. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Specification | Range | Accuracy | Manufacturer |
|---|---|---|---|---|
| Electromagnetic Flowmeters | GHRLD-10SF1F200P611 | 2–12 L/min | ±0.5% FS | Hongbowell Technology Co., Ltd., Beijing, China |
| Pressure Transmitter | GHR601G9C1CNC | 0–30 MPa | ±0.5% FS | |
| Temperature Transmitter | GHR/RWBP(0-100)A1BN | 0–100 °C | ±0.5% FS | |
| Screw-Type Temperature Sensor | WZP-291 | −50–450 °C | ±0.5% FS | Guizhong Technology Co., Ltd., Hangzhou, China |
| Pt100 Temperature Sensor | WZP-GZPT-A | −50–200 °C | ±0.5% FS | |
| Displacement Sensor | MT80-2000 | 0–2000 mm | ±0.05% FS | Hotwell Technology Co., Ltd., Shenzhen, China |
| Drilling Parameters | Result Parameters | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Ti | Tb | q | P | v | dn | Dd | V | Dj | Tf | Dt | D300 | Dn | η | ηn | η300 | |
| °C | °C | L/min | MPa | m/h | mm | Mm | m/s | mm | °C | mm | mm | mm | ||||
| #1 | −8 | 21.300 | 11.575 | 3.809 | 8 | 2.0 | 720 | 61.53 | 89 | 9.81 | 157.22 | 125.55 | 113.8 | 0.81 | 0.72 | 0.80 |
| #2 | −8 | 21.000 | 11.671 | 3.707 | 8 | C2.0 (2.0) | 720 | 62.04 | 81 | 8.72 | 157.87 | 121.82 | 123.8 | 0.85 | 0.78 | 0.77 |
| #3 | −9 | 39.863 | 8.073 | 2.000 | 8 | 2.0 | 660 | 42.91 | 93 | 16.32 | 179.76 | 136.14 | 128.5 | 0.80 | 0.72 | 0.76 |
| #4 | −9 | 39.005 | 8.021 | 1.757 | 8 | C2.0 (2.0) | 680 | 42.64 | 86 | 16.47 | 178.70 | 151.52 | 144.28 | 0.96 | 0.82 | 0.86 |
| #5 | −6 | 55.300 | 4.106 | 0.437 | 8 | 2.0 | 690 | 21.85 | 60 | 24.55 | 151.37 | 112.28 | 110.42 | 0.87 | 0.73 | 0.74 |
| #6 | −6 | 53.000 | 4.193 | 0.458 | 8 | C2.0 (2.0) | 660 | 22.27 | 62 | 24.88 | 152.11 | 120.98 | 114.53 | 0.96 | 0.75 | 0.80 |
| #7 | −6 | 39.700 | 7.982 | 5.910 | 8 | 1.5 | 680 | 75.43 | 108 | 13.93 | 181.58 | 139.56 | 140.89 | 0.80 | 0.78 | 0.77 |
| #8 | −6 | 40.200 | 8.251 | 0.735 | 8 | 2.5 | 660 | 28.07 | 73 | 17.37 | 186.49 | 151.36 | 129.94 | 0.72 | 0.70 | 0.72 |
| #9 | −6 | 40.000 | 8.298 | 0.356 | 8 | 3.0 | 650 | 19.60 | 72 | 19.54 | 185.85 | 130.84 | 120.93 | 0.70 | 0.65 | 0.70 |
| #10 | −3 | 40.800 | 7.878 | 0.310 | 8 | 3.0 | 770 | 18.61 | 60 | 19.63 | 183.26 | 129.16 | 129.16 | 0.77 | 0.70 | 0.70 |
| #11 | −3 | 39.700 | 8.038 | 0.331 | 8 | 3.0 | 840 | 18.99 | 66 | 18.63 | 184.08 | 125.45 | 126.3 | 0.74 | 0.69 | 0.68 |
| #12 | −3 | 40.300 | 8.241 | 0.341 | 8 | 3.0 | 860 | 19.47 | 64 | 19.316 | 187.31 | 125.91 | 120.18 | 0.71 | 0.64 | 0.67 |
| #13 | −3 | 39.600 | 8.068 | 0.325 | 8 | 3.0 | 900 | 19.06 | 63 | 18.1 | 182.08 | 126 | 121.36 | 0.69 | 0.67 | 0.69 |
| #14 | −6 | 40.000 | 8.372 | 2.160 | 6 | 2.0 | 690 | 44.50 | 113 | 13.53 | 215.33 | 188.05 | 171.18 | 0.82 | 0.79 | 0.87 |
| #15 | −6 | 39.300 | 8.277 | 2.115 | 10 | 2.0 | 680 | 44.00 | 83 | 15.22 | 165.89 | 127.69 | 119.23 | 0.79 | 0.72 | 0.77 |
| #16 | −6 | 40.300 | 8.167 | 2.080 | 12 | 2.0 | 620 | 43.41 | 74 | 16.63 | 150.77 | 118.64 | 116.7 | 0.82 | 0.77 | 0.79 |
| #17 | −9 | 39.200 | 4.187 | 0.474 | 8 | 2.0 | 650 | 22.26 | 51 | 17.60 | 131.41 | 98.61 | 96.04 | 0.80 | 0.73 | 0.75 |
| #18 | −9 | 39.200 | 6.167 | 1.134 | 8 | 2.0 | 650 | 32.78 | 65 | 16.20 | 160.65 | 124.55 | 120.18 | 0.86 | 0.75 | 0.78 |
| #19 | −8 | 38.300 | 10.281 | 3.299 | 8 | 2.0 | 680 | 54.65 | 112 | 13.54 | 206.24 | 162.52 | 151.47 | 0.74 | 0.73 | 0.79 |
| #20 | −3.5 | 21.200 | 7.666 | 1.785 | 8 | 2.0 | 650 | 40.75 | 47 | 9.49 | 134.79 | 109.11 | 99.68 | 0.82 | 0.74 | 0.81 |
| #21 | −2.5 | 24.800 | 8.445 | 2.102 | 8 | 2.0 | 730 | 44.89 | 5.8 | 11.40 | 150.63 | 112.48 | 111.25 | 0.80 | 0.74 | 0.75 |
| #22 | −3.5 | 32.800 | 8.470 | 2.217 | 8 | 2.0 | 690 | 45.02 | 75 | 13.19 | 172.86 | 148.36 | 138.85 | 0.80 | 0.80 | 0.86 |
| #23 | −2.5 | 49.800 | 8.549 | 2.239 | 8 | 2.0 | 730 | 45.44 | 109 | 16.05 | 212.36 | 182.65 | 172.67 | 0.78 | 0.81 | 0.86 |
| #24 | −8 | 55.700 | 8.603 | 2.289 | 8 | 2.0 | 720 | 45.73 | 119 | 17.24 | 221.65 | 185 | 165.19 | 0.70 | 0.75 | 0.83 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, Z.; Sun, Y.; Fan, X.; Talalay, P.; Yang, Y.; Liu, X.; Gong, D.; Li, B.; Wang, T.; Wu, W.; et al. Experimental Study on the Hole-Forming Process at the Borehole Bottom During Hot Water Drilling in Ice and Its Influence Mechanisms. J. Mar. Sci. Eng. 2025, 13, 817. https://doi.org/10.3390/jmse13040817
Deng Z, Sun Y, Fan X, Talalay P, Yang Y, Liu X, Gong D, Li B, Wang T, Wu W, et al. Experimental Study on the Hole-Forming Process at the Borehole Bottom During Hot Water Drilling in Ice and Its Influence Mechanisms. Journal of Marine Science and Engineering. 2025; 13(4):817. https://doi.org/10.3390/jmse13040817
Chicago/Turabian StyleDeng, Zhipeng, Youhong Sun, Xiaopeng Fan, Pavel Talalay, Yifan Yang, Ximu Liu, Da Gong, Bing Li, Ting Wang, Wei Wu, and et al. 2025. "Experimental Study on the Hole-Forming Process at the Borehole Bottom During Hot Water Drilling in Ice and Its Influence Mechanisms" Journal of Marine Science and Engineering 13, no. 4: 817. https://doi.org/10.3390/jmse13040817
APA StyleDeng, Z., Sun, Y., Fan, X., Talalay, P., Yang, Y., Liu, X., Gong, D., Li, B., Wang, T., Wu, W., Zhang, N., & Wei, X. (2025). Experimental Study on the Hole-Forming Process at the Borehole Bottom During Hot Water Drilling in Ice and Its Influence Mechanisms. Journal of Marine Science and Engineering, 13(4), 817. https://doi.org/10.3390/jmse13040817