1. Introduction
Many different concepts for wave power extraction are being studied and evaluated, both regarding how to best capture power from the ocean waves, and how to transfer the capture of power to electricity [
1,
2,
3]. In this paper, a point absorbing buoy connected to a linear permanent magnet generator is considered. The point absorbing buoy is small, relative to the wavelength, and can capture power from any wave direction. Due to the high forces and the slow and highly variable speed in alternating directions, the power captured by the point absorber cannot be connected to any conventional rotating generator, without adding an intermediate conversion step, which will add to system complexity and system loss. A linear generator can take advantage of the heave motion of the wave and therefore linear generators are used in several different wave energy converters [
4,
5,
6,
7]. Drawbacks with linear generators for wave power is that they become very large due to the high forces and low velocities [
8,
9] and that the induced voltage varies in both frequency and amplitude [
10,
11,
12,
13]. Another drawback with linear generators is the partial stator overlap that can occur depending on the design [
14].
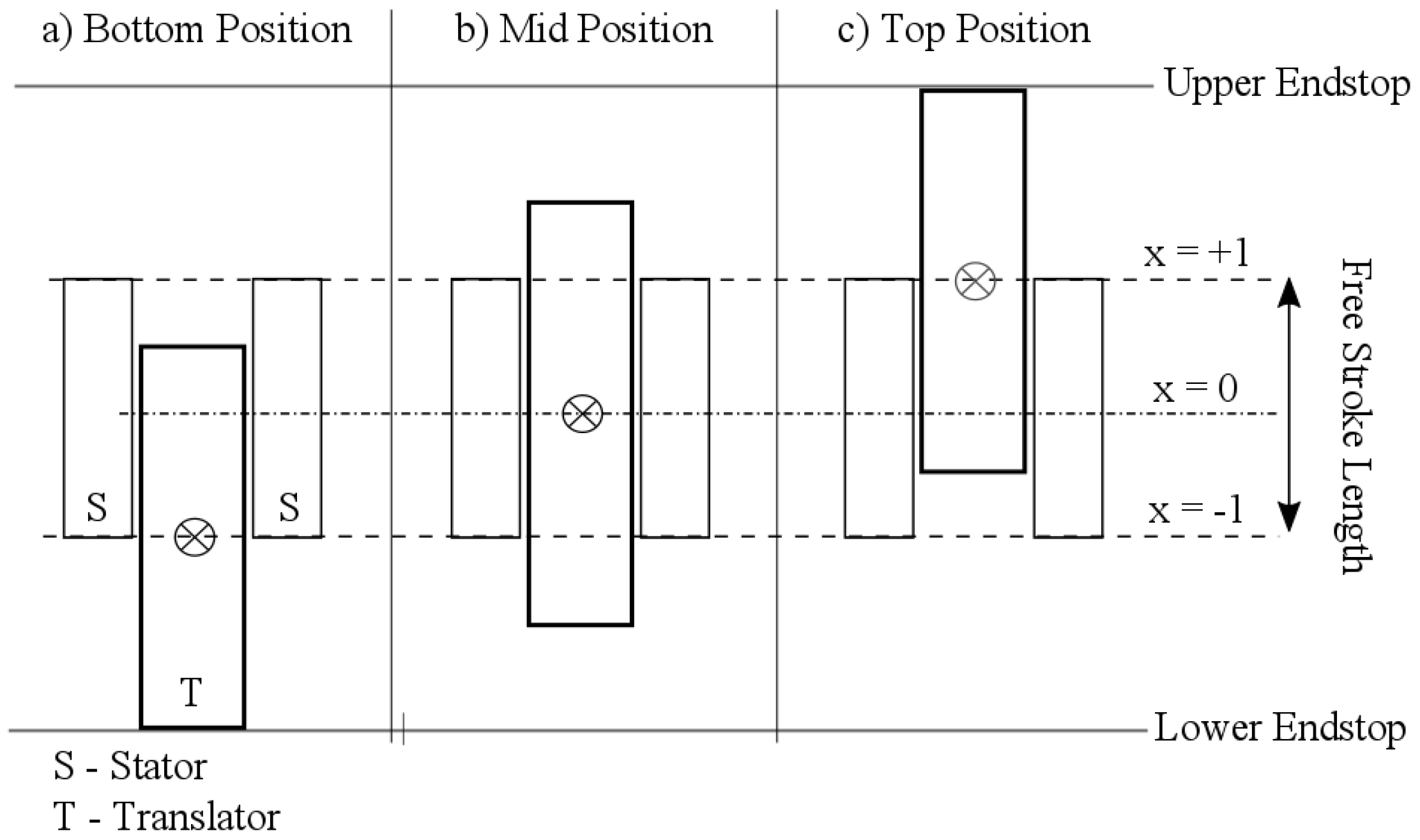
Power transfer from the translator to the stator occurs where the translator and stator overlaps (see
Figure 1). The fraction of the stator that momentarily is covered by the translator is denoted relative stator overlap or relative active area
and is 1 when the stator has full overlap with the translator and is 0 when the translator is completely pulled out of the stator. A varying partial stator overlap will affect the power take-off (PTO) damping of the generator, and thus the dynamical behavior of the wave energy converter (WEC) during operation. This will have consequences on both power production and forces acting on the WEC, one of the most important being the upper end-stop force in high waves. The decreased power absorption is important to understand when designing the generator, while the end-stop forces are important to know for the structural design of end-stop.
There is no conclusive approach as to how to include partial stator overlap in the PTO modeling, which is reviewed in the background section. To the authors’ knowledge, partial stator overlap in permanent magnet linear generators is a topic for the concept from Uppsala University [
15,
16], the Archimedes Wave Swing [
17,
18], the Berkeley Wedge [
5] and the linear generator developed at Oregon State University [
6].
This study aims to verify theory about power take-off (PTO) forces and power production for partial stator overlap with data from onshore testing of a point absorber wave energy converter. By evaluating how partial stator overlap, i.e., partial active area, influences the power transfer, a relationship between electrical power and relative stator overlap is identified.
The paper begins with the Background, including how partial stator overlap has been modeled and measured in previous studies, and a description of the generator used for this study. It then continues, in the Method section, by describing the experimental setup, data processing and a case study. The Results section contains experimental results from onshore tests and a simulation case-study assessing what consequence different dependencies will have on the offshore behavior of the full WEC. The results of the onshore tests include inductance measurements, some general results of the onshore tests and results on which dependency the data suggests between relative stator overlap and power production.
3. Method
This section describes the process of collecting and analyzing experimental data for how the generator damping correlates with stator overlap. It begins with describing the experimental setup for the onshore measurements and a description of complementary measurements made to assess the inductance of the generator. The section then continues with a description of the post-processing of the data including the linear regression analysis performed in this study. Thereafter follows a description of a case study on the potential impact of simulating different dependence of partial stator overlap.
3.1. Experimental Setup
The generator was tested onshore using a mobile crane to move the translator, while the generator was connected to different resistive loads. The experiment is similar to those previously performed on the L10 generator [
32]. During the onshore evaluation of the L10, measurements were done of line force, phase voltages and phase currents while the generator was connected to different resistive loads. To improve the study further, compared to [
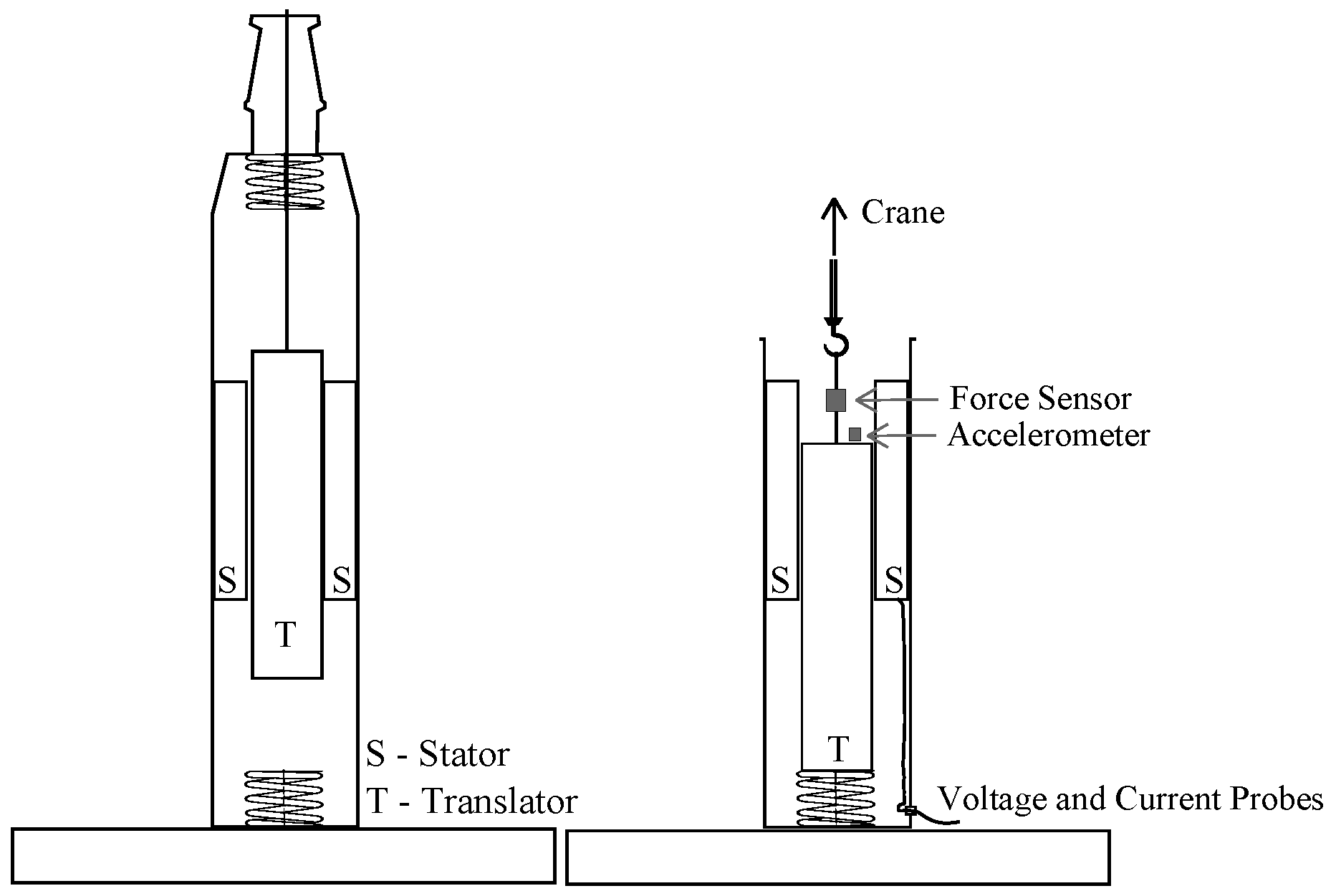
32], accelerometer measurements were added in the experiment presented in this paper. In addition, a stronger crane was used in order to obtain higher translator speeds. To allow for a longer distance of partial stator overlap, the experiment was performed with the upper part of the generator disassembled. Consequently, there was no upper end-stop limiting the translator’s upward movement. In contrast to previous onshore measurement done on the generator L10, where the upper end-stop limited the partial stator overlap range.
Figure 3 shows a schematic of the WEC generator when fully assembled and in the state it was tested.
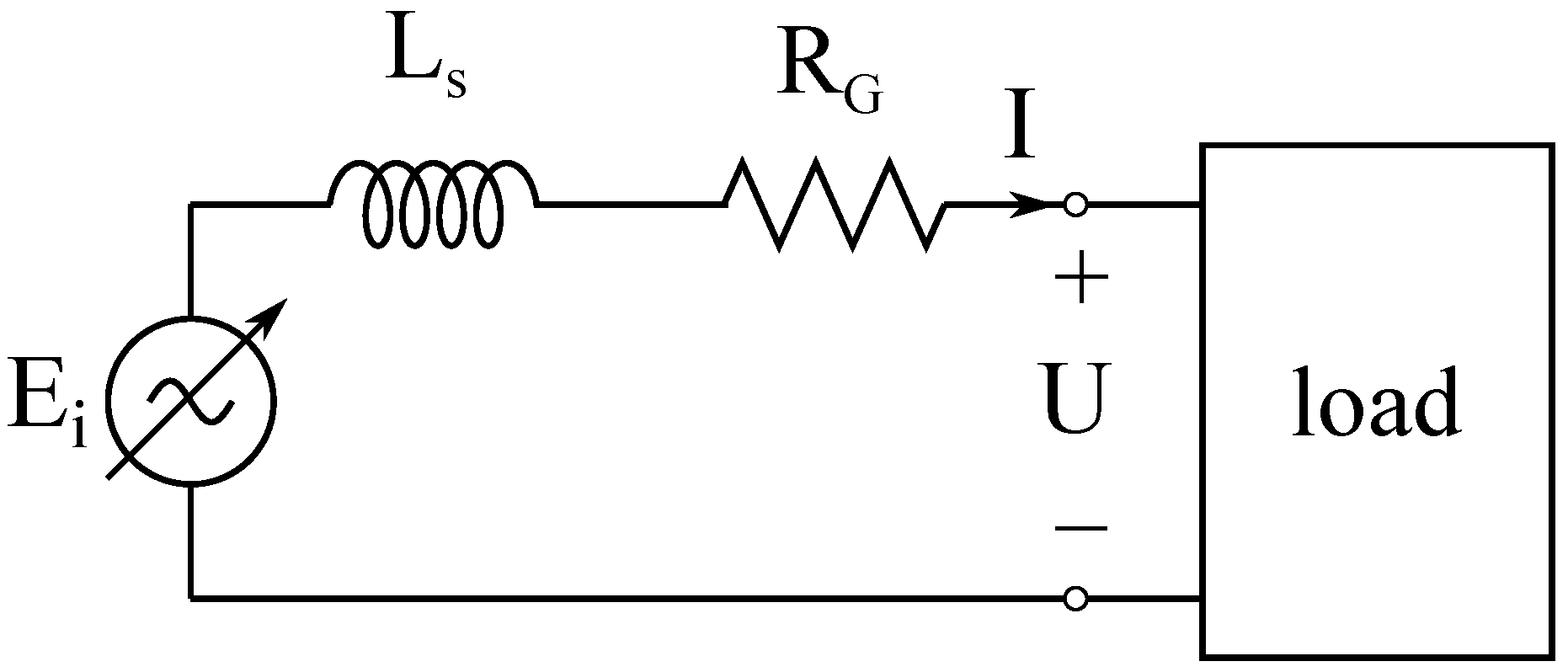
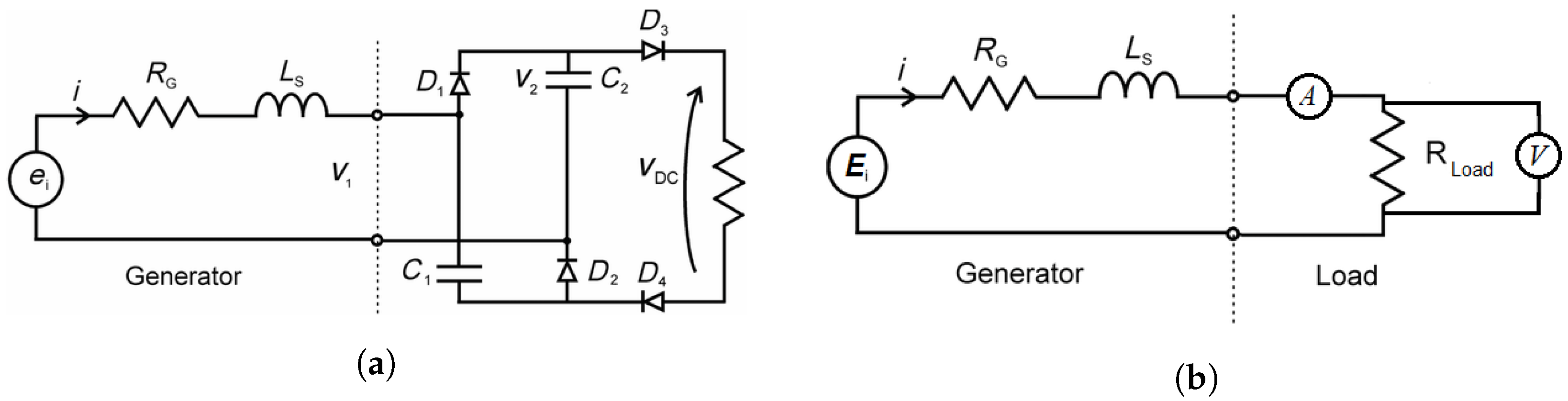
Figure 5b shows a one-phase equivalent circuit of the generator, load and some of the measurement equipment during the onshore experiment.
The measurement equipment used during the onshore tests with a mobile crane is presented in
Table 2. All signals were logged on the same unit with a 1 kHz sampling frequency. The force sensor was connected between the translator and the crane connection point. The accelerometer, placed directly on the translator, was used to determine acceleration, speed as well as position of the translator. The data was tuned against zero crossings in the voltage data in order to remove signal drift. A draw wire position sensor was used to validate the position derived from the accelerometer. Phase voltage and currents were measured at the external resistive loads.
The measurements were done with seven different load cases: no load, 0.7 , 1.1 , 2.2 , 4.4 , 6.6 and short circuit. For each load, the translator was moved upward and downward for twelve different crane settings, resulting in a wide range of translator speeds. Resistive loads might not be the best option for maximum power extraction, but offers a straightforward and transparent approach for evaluation of the generator’s behavior.
The generator is designed to be connected to a resonance-rectifier during operation. Since it is not connected to the resonance-rectifier during these tests, lower power is expected compared to when using the resonance-rectifier. Electrical circuit models for the generator connected to the resonance-rectifier and during the onshore measurements can be seen in
Figure 5.
3.2. A Study of the Inductance at Partial Overlap
A separate experimental study was made for the generator impedance. As stated in connection with Equation (
8), the quadratic relationship between the
and
assumes that the impedance
Z is independent of
. For the circuit presented in
Figure 5b, the circuit impedance is
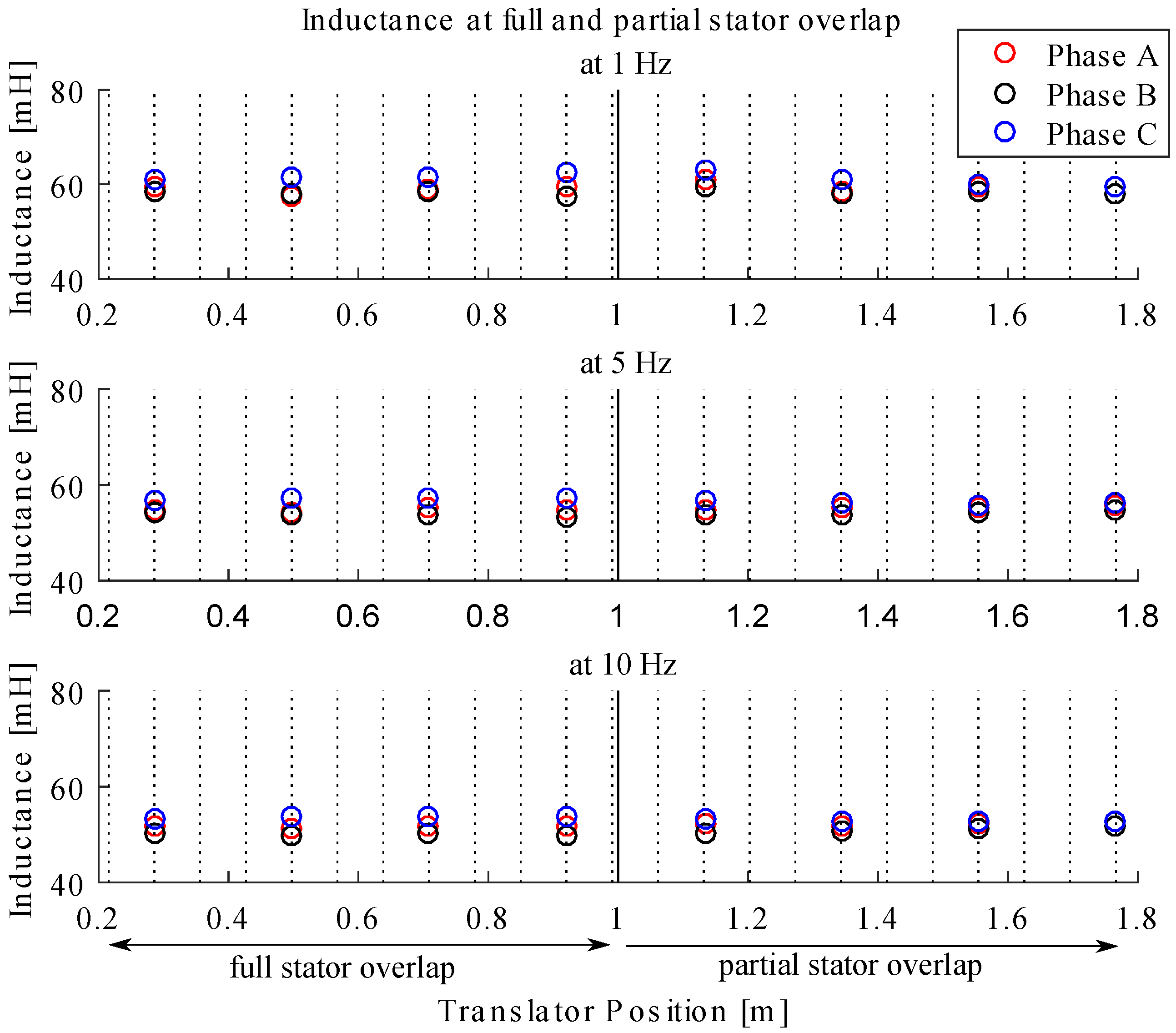
To validate the assumption that Z is independent of , inductance measurements were made for different values of .
The inductance was determined via impedance measurements by determining the phase shift between voltage and current measurements over each stator phase when the generator was connected to an external AC current source. Tests were performed at frequencies
Hz, and with the translator held still at different positions, from full stator overlap to 60% stator overlap. To avoid any influence of generator saliency, the translator was adjusted to the same local position within each pole pair width, matching stator teeth against the top pole shoe of the translator, at each position. It should be noted that simpler instrumentation, such as an LCR-meter, will not provide a sufficient current to magnetize the machine, which would lead to an underestimation of the inductance [
38].
3.3. Post Processing of Data
The electrical power for each phase
is calculated from the generated electricity and copper losses:
where
i is the phase (1, 2 or 3). The total electrical power is also used:
The power produced in each phase, is expected to oscillate sinusoidally, with a shift between the phases, which follows from a physical shift in the vertical position of each stator package. Assuming a perfectly balanced generator, the total power output is constant when the speed of the translator is constant. In reality, some fluctuations are to be expected due to irregularities. When analyzing the relationship between stator overlap and produced power, studies were performed on both the total power production and on the power production in each phase . For , all data was used, while, for , only the peak values were used.
The electromagnetic damping
is calculated by taking the total electrical power
divided by the speed squared:
The speed has been calculated from the measured acceleration and from detecting zero-crossings in the generated voltage in each phase. Any irregularities in
will be visible in the experimental values of
. As can be seen in
Section 2.1,
can also be calculated from the measured line force but does then also include iron losses and friction. The subscript ”el” is added to show that the damping coefficient is calculated from the measured current and voltage.
3.4. Linear Regression Analysis
Linear regression analysis was performed on the experimental data to determine what relationships the data shows between electrical power and relative stator overlap as well as between damping and relative stator overlap. Each linear regression analysis is done with a least square fits of the data in MATLAB R2016b (Mathworks, Natick, MA, USA) with the command fitlm. The linear regressions are evaluated by using the coefficient of determination , which is a measurement of how well the model predicts the data. and when the linear regression predicts the data well .
The cases are divided depending on if the translator is moving upward or downward and depending on which load is connected to the generator. The linear regression is applied to data for all loads except for no load, giving 144 cases in total for the linear regressions and 12 cases per load and direction.
Firstly, the logarithmic values are used and linear regressions are done on
and
where c is a constant. If
, which is equivalent to a linear relationship between
respectively,
and
;
is equivalent to a quadratic relationship etc. See also Equations (
19) and (
20).
For Equations (
17) and (
18),
c is found from the linear regression and not assumed, and the values of
and
are derived from the collected data. If the assumptions in
Section 2.1 are valid,
c should be approximately 2. The linear regression with Equation (
17) is done on the data for all three phases as well as on the total electrical power. When the analysis is done for the total electrical power
, all data points are used. When the analysis is done for each phase
, only the peak values are used since the electrical power per phase oscillates heavily due to the nature of alternating current.
After the linear regression analysis on Equations (
17) and (
18), linear regression analysis is performed on
and
for a range of assumed values of
c. Based on the theory and previous studies, several values of
c between 0 and 5 are tested in the linear regression analysis. The linear regressions of Equations (
19) and (
20) are performed with the intercept forced to be zero. In [
39], linear regression analysis was performed on (
19) for
but not per phase.
The advantage of doing the linear regression analysis on the logarithmic values, as in Equations (
17) and (
18), is that the best fit of
c is part of the result from the regression analysis, whereas the linear regression analysis of Equations (
19) and (
20) requires running the algorithm over several different values of
c. The advantage of using Equations (
17) and (
18) is that the data is less manipulated and that no issues due to the data manipulation will arise, e.g., negative values on
.
The linear regressions are done exclusively on positions above the stator’s midpoint since it is the change in overlapping area that is studied and the forces on the translator from the spring at the bottom may interfere with the analysis the influence of the relative stator overlap on . The values are chosen so that for all linear regression analysis. The lower limit for is chosen so that an even the number of magnets has passed without the range being too narrow. For lower values on , the crane begins to decelerate the translator for safety reasons, which could affect the data analysis.
3.5. Case Study: Impact Analysis
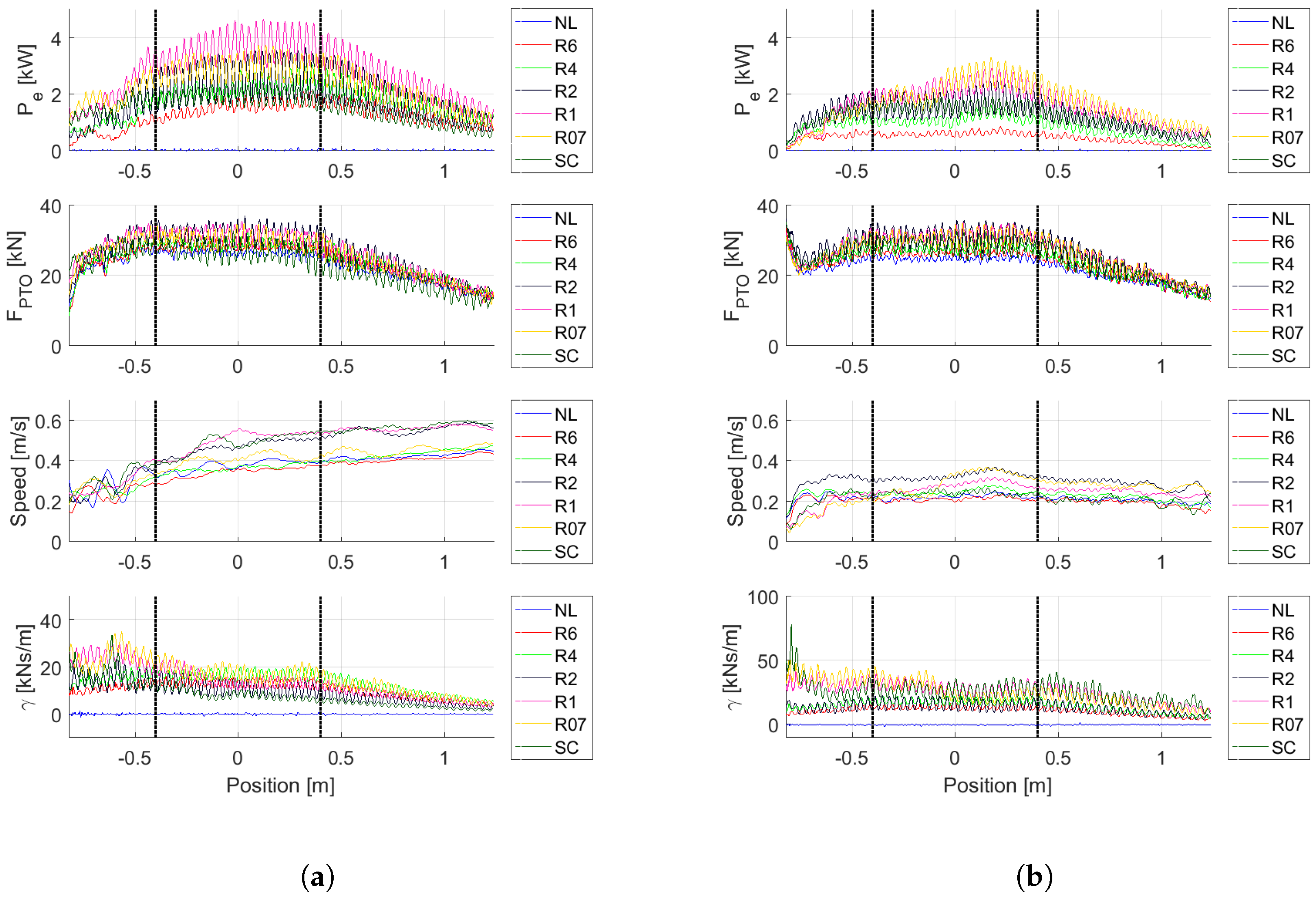
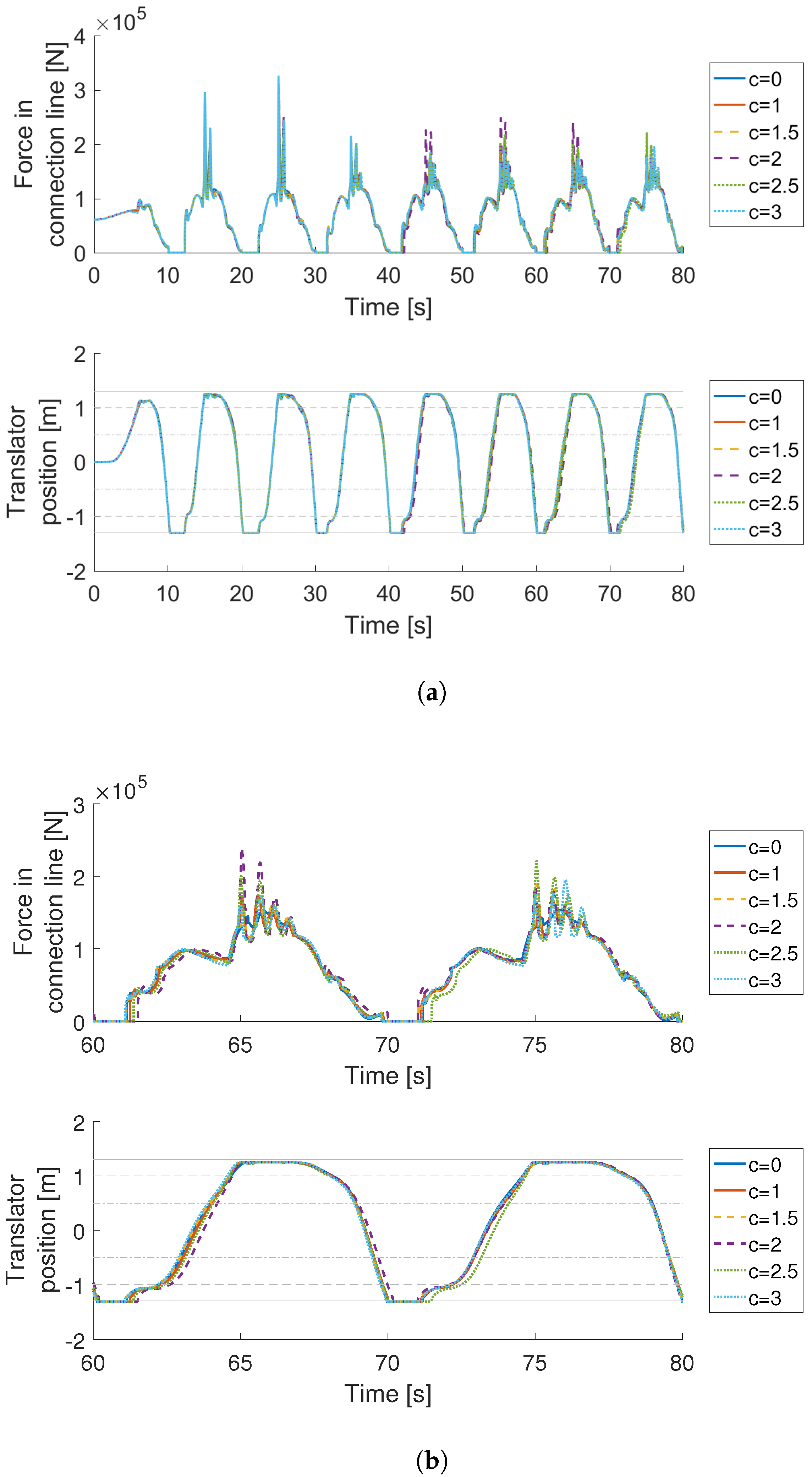
A case study was performed to analyze how a decrease in damping due to partial stator overlap may affect the dynamical behavior of the WEC. Simulations were done in the open source software OpenFOAM v.2.4.0, with a fully nonlinear Reynolds-averaged Navier–Stokes model in the time domain. The WEC is modeled as a cylindrical buoy moving with six degrees of freedom, restrained by a force in the connection line, directed towards an anchoring point on the seabed. The translator position and speed is calculated as a function of the buoy position and connection line force. Regular incident waves with a wave height of 5.9 m and a period of 10 s were used, which corresponds to a high storm wave at the Lysekil test site. The numerical wave tank is 300 m long, 75 m high and 60 m wide, and the water depth is 26 m. A more detailed description of the case study method and the modeling of buoy and generator is given in [
19], where a similar case-study was made to study the generator’s dynamical behavior with different assumptions of the speed dependence of
. The model has been verified with physical wave tank experiments and the complete model description is found in [
40].
Five different cases were studied, with values of , where assumes full stator overlap at all translator positions and assumes a cubic relationship between and . There are less studied values of c than in the linear regression analysis, but a sufficient amount to show possible trends on how the chosen value of c affects the simulated power and forces.
A constant damping of
kNs/m was used for all cases. As pointed out in
Section 2.1,
is not always constant, but it is considered out of the scope of this study to have a speed-dependent
. The value 28 kNs/m was chosen because it has been observed for this generator [
19] and the same value or approximately the same value has been used in other studies [
20,
21,
24,
27].
The objective of the case study was to determine what influence the exponent of
can have on the end-stop forces. An accurate estimation of the highest expected end-stop force is crucial when designing the mechanical strength of the WEC. For the simulations performed, waves corresponding to high storms at the Lysekil research site, where the WEC is designed to operate, were chosen. More information about the Lysekil research site can be found in e.g., [
15].
By integration of the resulting PTO force, the simulations can also be used to calculate the relative difference in power production for the different cases. Although such results are only valid for the specific waves studied, they give an indication of how big an impact the damping at partial stator overlap could have on power production in general. This case study focuses, however, only on one type of waves and not a full spectrum of waves.
5. Discussion
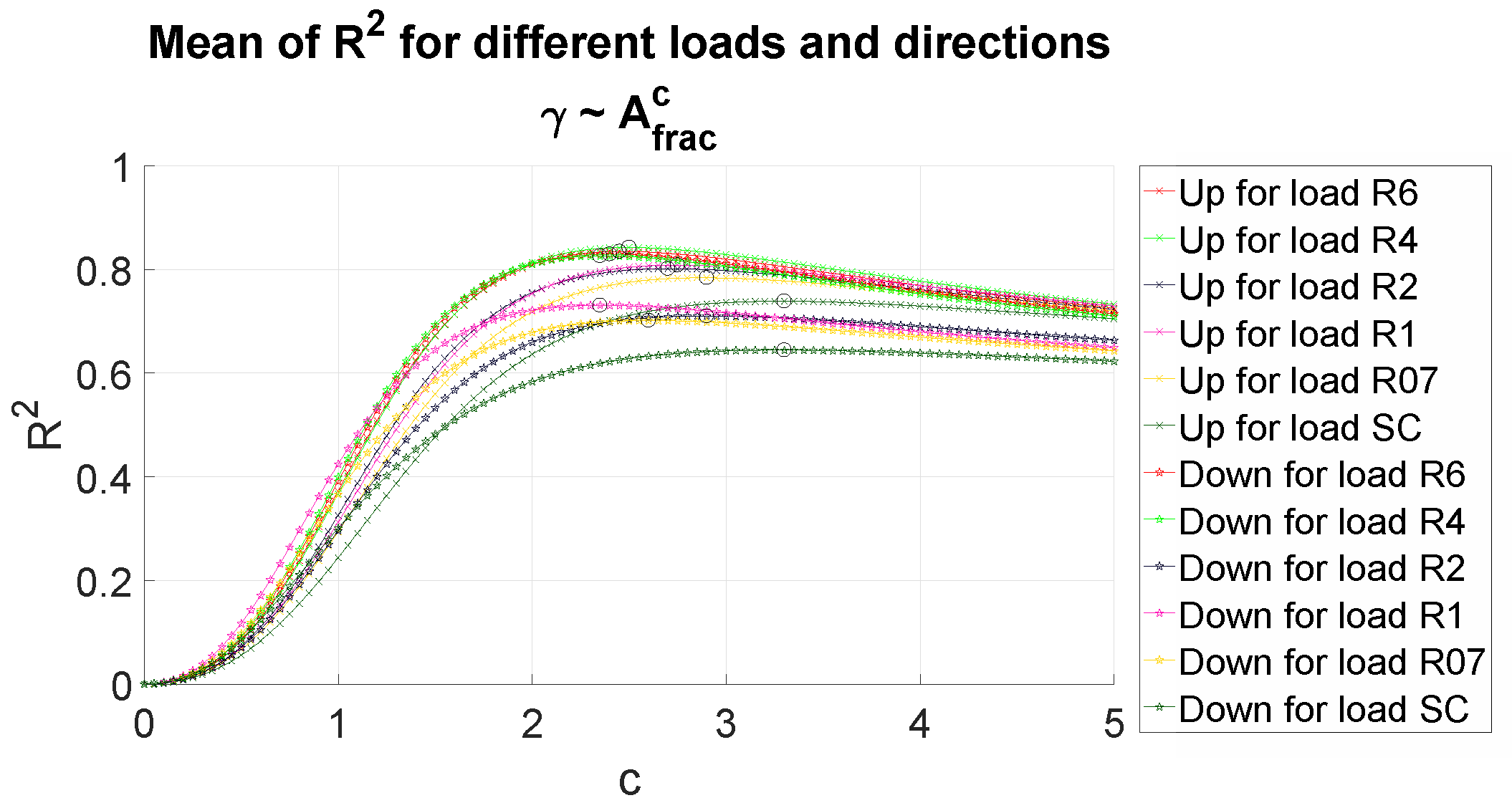
From the experimental results, it cannot be rejected that and depend quadratically on , as suggested by theory. The data analysis of experimental measurement data gives an approximate number, suggesting that affects and somewhere between linearly and cubically. Some deviations are always expected when dealing with experimental data, but when good values on for c between 1.1 and 3.2 are found, it becomes difficult to make a solid statement.
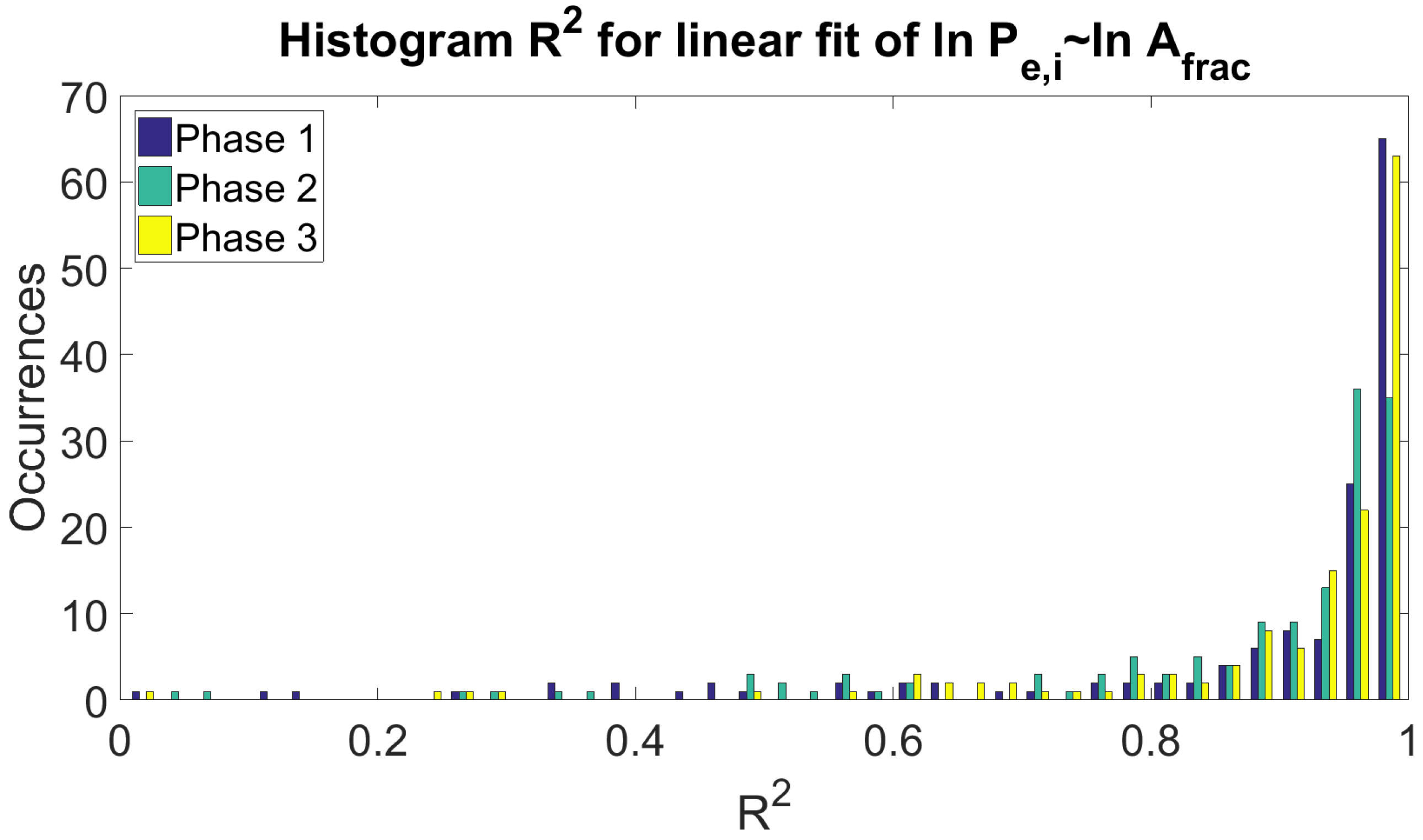
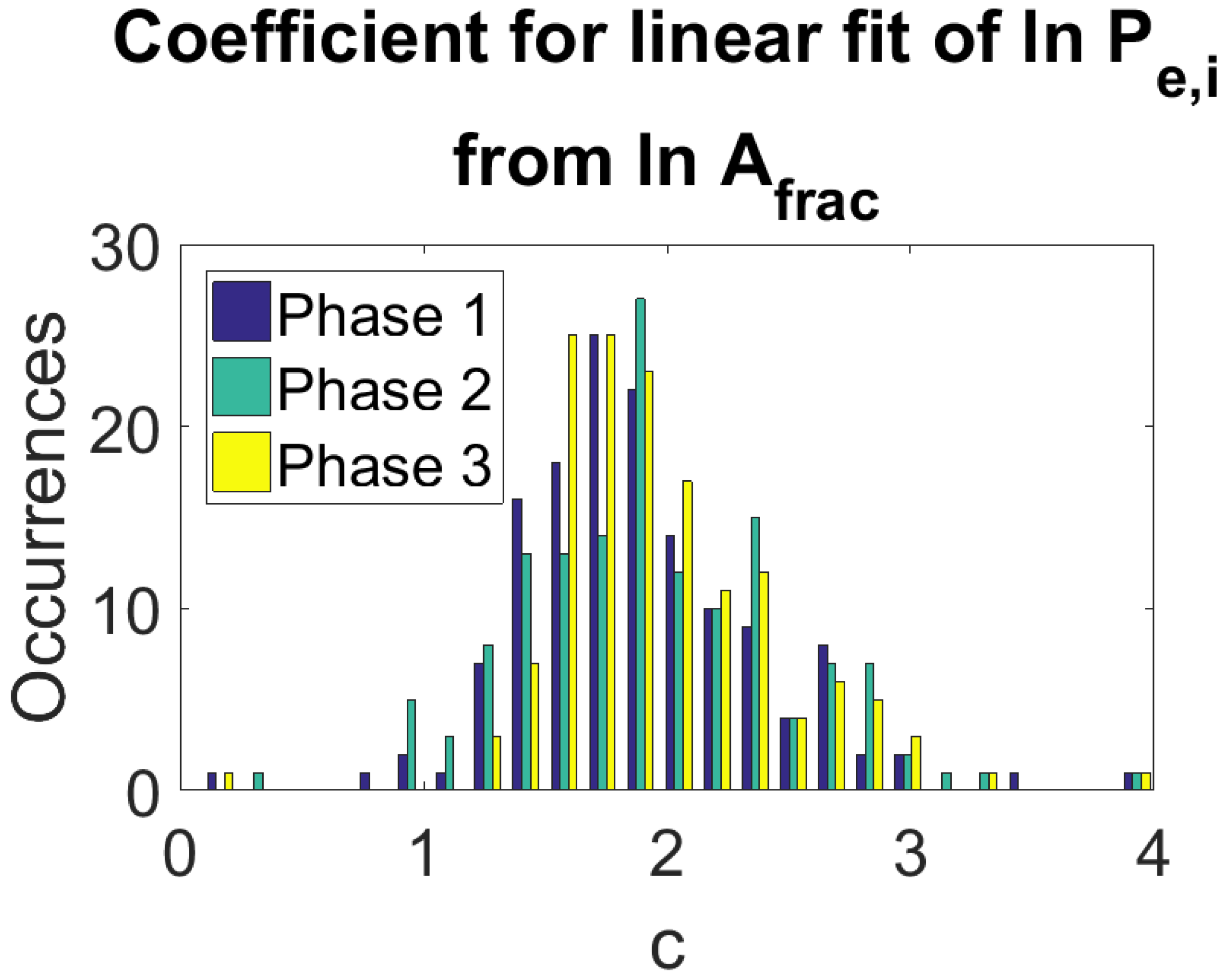
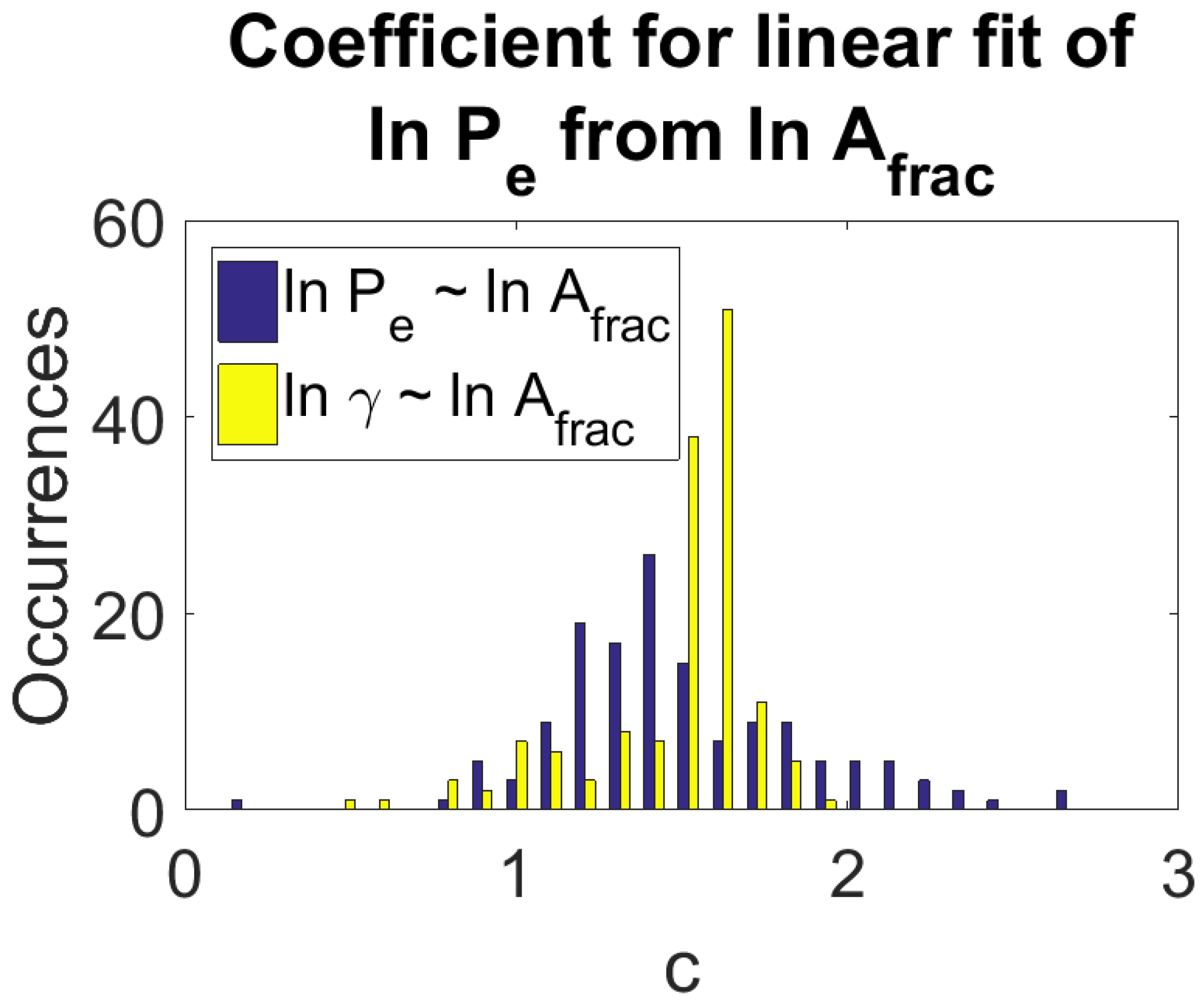
It should be noted that none of the results support that
c should be less than 1. When the logarithmic values are used for linear regression analysis,
only in very few cases (see
Figure 10 and
Figure 11). When the logarithmic values are used, there are also very few cases where the results give
. When the linear regression analysis is done on
, a majority of the cases give good results for
, which is less than the expected value 2, but high enough to determine that
has a major impact on calculations and simulations.
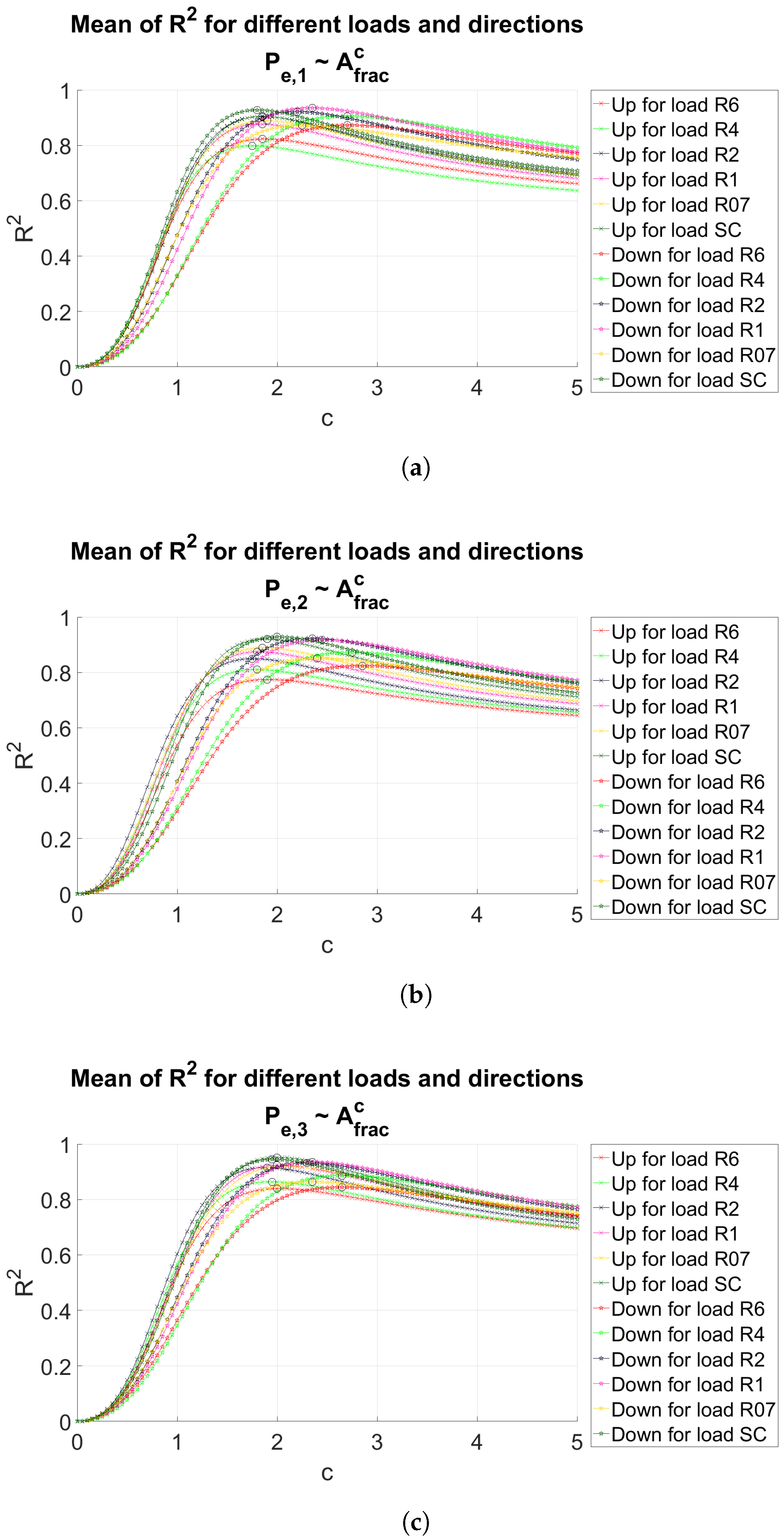
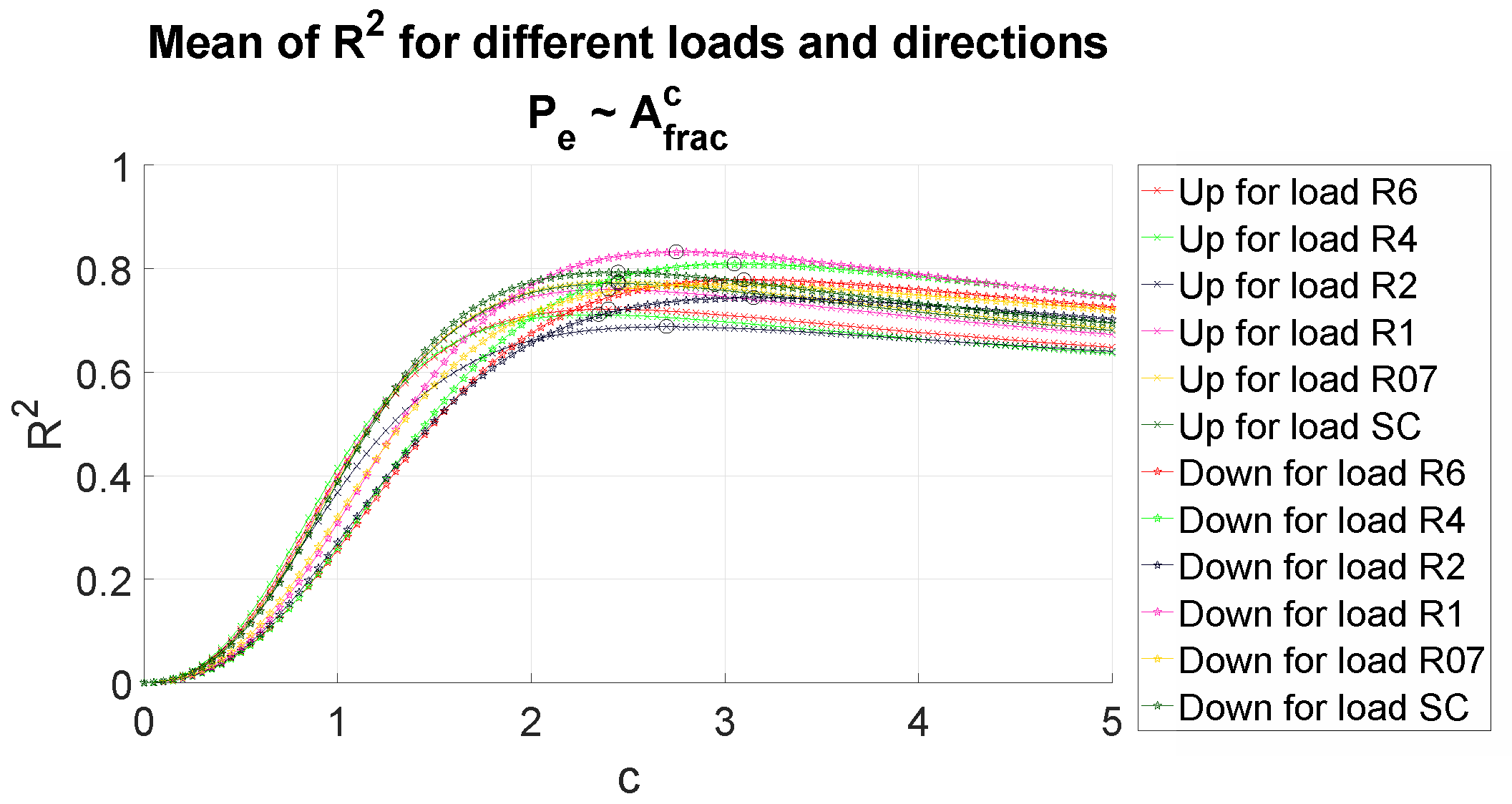
When the linear regression analysis is done for a range of
c, it is especially visible that
gives higher values on
. However, the value of
does not drop significantly for increasing values of
c and is only marginally lower for
compared to
(see
Figure 12,
Figure 13 and
Figure 14). Compared to when the logarithmic values are used, higher values of
c are favored. Weighing this in, a quadratic relationship between
and
as well as between
and
seems like an appropriate approximation. However, linear or cubic relationships, including relationships in between linear and cubic, cannot be excluded. As implicated in
Section 2.1, this could also depend on the choice of control mechanism and the design of the linear generator.
There are several reasons why the experimental results deviate from the expected results. In
Section 2.1 it is mentioned that the impedance, friction and iron losses are assumed negligible or independent of
to get the quadratic relation. During the measurements, the frictional losses and iron losses together are not negligible in the experiments. Through additional measurements of inductance, it was determined that inductance is not dependent on partial stator overlap. The influence from friction and iron losses can have affected the results from the linear regression analysis.
The speed is not constant and the acceleration of the translator could affect the linear regression analysis. Since the electrical output dampens the motion of the translator, acceleration easily occurs when the partial stator overlap is changing, which could affect the results of the linear regression analysis.
One of the reasons for studying
is that it is expected to be less dependent on speed than
. The analysis based on
generally resulted in approximately the same values for
c. Considering that
also has a speed dependence, cases with high load resistance should be the least speed dependent [
19]. There is a weak trend of better fits for higher load resistance (see
Figure 14).
There are also more sources of error when doing experiments on a full-scale device outdoors than if a similar test would have been done on e.g., a small prototype. If only lower velocities would have been studied, it would also have been easier to control the speed with the crane. Fairly high velocities were used here, with the drawback of having less constant speed. It could, however, be noted, that, in real waves, speeds of up to 2 m/s might be present, but it is difficult to achieve these speeds with traverses or mobile cranes.
The air-gap between the stator and the translator varies depending on position since it is more difficult to get an exact air-gap width with the sandwich mounted magnets, compared to with surface mounted magnets. The expected deviation is , which will affect the magnetic flux and thereby the measured currents and voltages.
The electrical power and the damping coefficient oscillate heavily both during full stator overlap and partial stator overlap. Some oscillations are also visible at times in the speed measurements. If this is purely due to the fluctuations in electrical power and power-take off (PTO) force is the subject of further studies since it might also be due to cogging or frictional forces. It can also be due to imprecision in the vertical displacement between the stator packages, which would mean that it is not precisely between each phase. A varying air gap, displacement of the translator and harmonic distortions can also cause the fluctuations.
Since oscillations are visible in so many parts of the data, it is likely that the oscillations have affected the results in the linear regression analysis. This could explain why only analyzing one phase gives better fits, because during those analyses, only the peak values of the electrical power are used in the linear regression analysis. It can also explain the minor differences between each phase in the results of the linear regression analysis.
From a short review of previous studies, it was found that the relationship between
and
is most often assumed linear, if not neglected entirely. The simulated energy yield in the case study is only slightly different depending on which value of
c is chosen (see
Section 4.4). This is a major explanation of why previous experimental studies can match the results from simulations [
20], even if
is used instead of
. The major differences in the case study are found when ignoring the partial stator overlap, e.g.,
, when compared to all the other tested relationships, among those linear, quadratic and cubic. This is an indication of the importance of taking the partial stator overlap into account when simulating linear generators. However, the peak force is significantly different for different values of
c.
Since the theoretical deduction suggests a quadratic relationship, this is advisable to use during modeling. There are, however, models that are easier to implement if linear relationships are used. Assuming a linear relationship between and or and could be acceptable, depending on the circumstances, for example, if assuming other relationships are computationally costly.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}