Partial Stator Overlap in a Linear Generator for Wave Power: An Experimental Study


Abstract
:1. Introduction
2. Background
2.1. Theoretical Background
2.2. Previous Work
2.3. Generator Description
3. Method
3.1. Experimental Setup
3.2. A Study of the Inductance at Partial Overlap
3.3. Post Processing of Data
3.4. Linear Regression Analysis
3.5. Case Study: Impact Analysis
4. Results
4.1. Inductance Measurements
4.2. Data Collected during Onshore Experiments
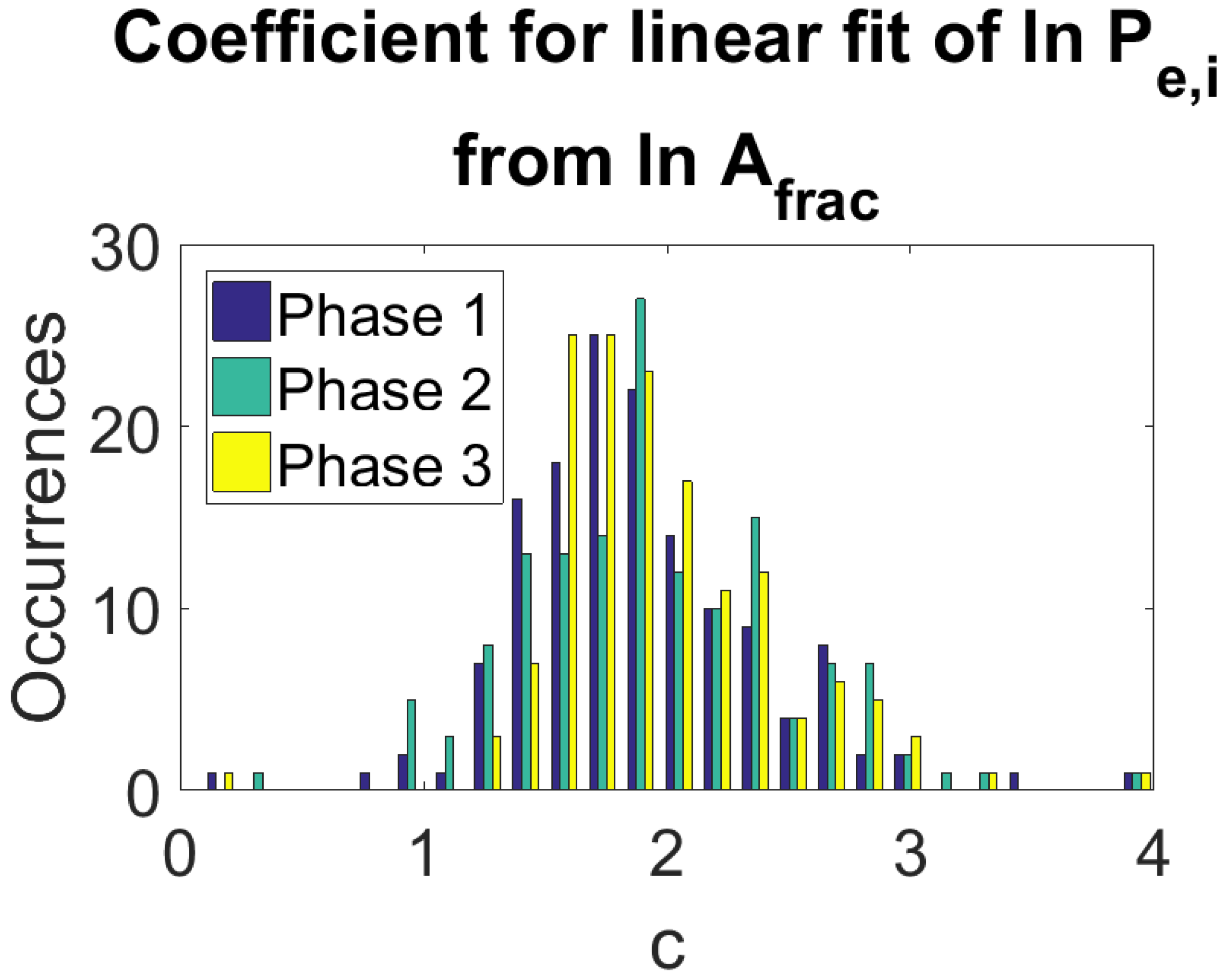
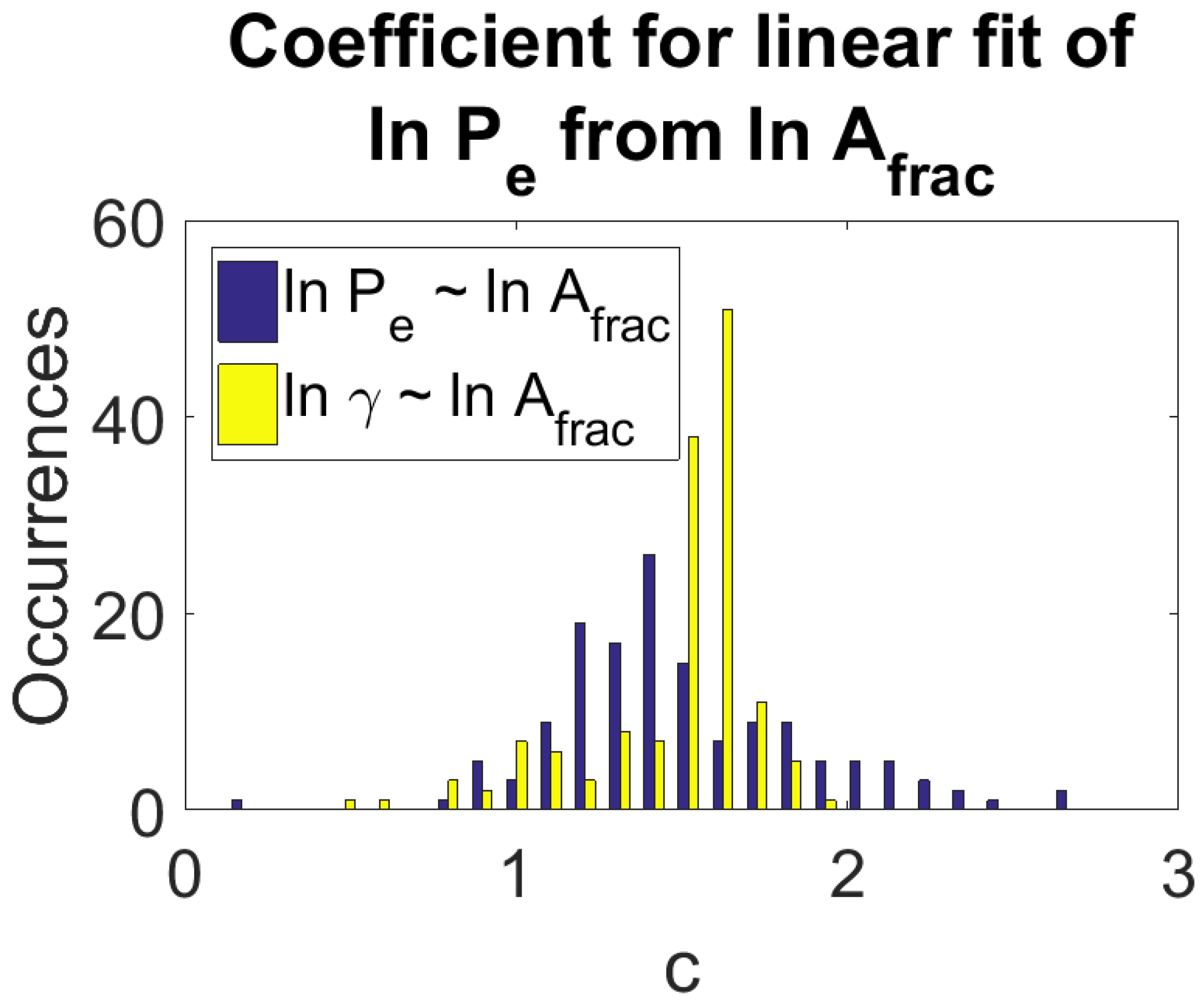
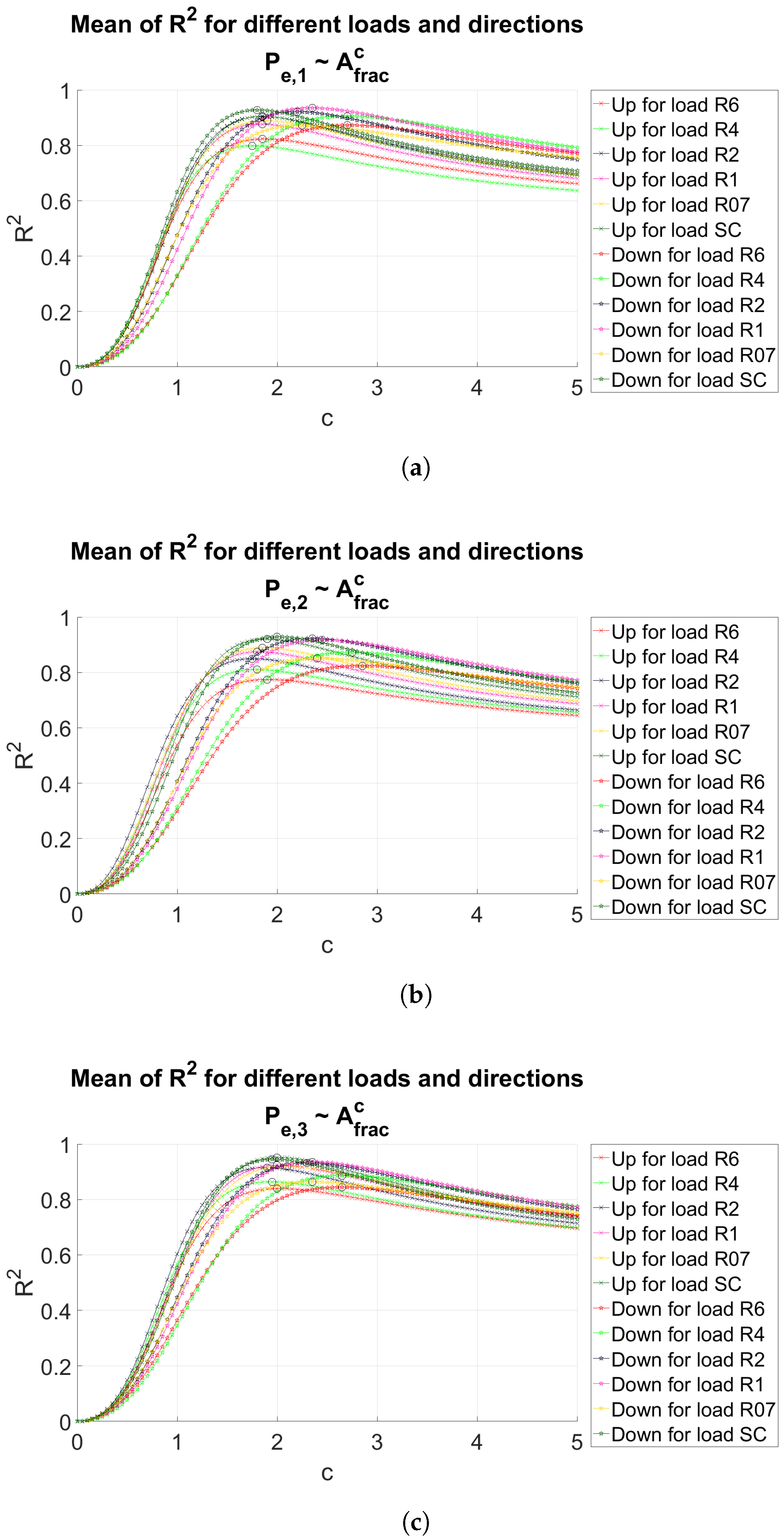
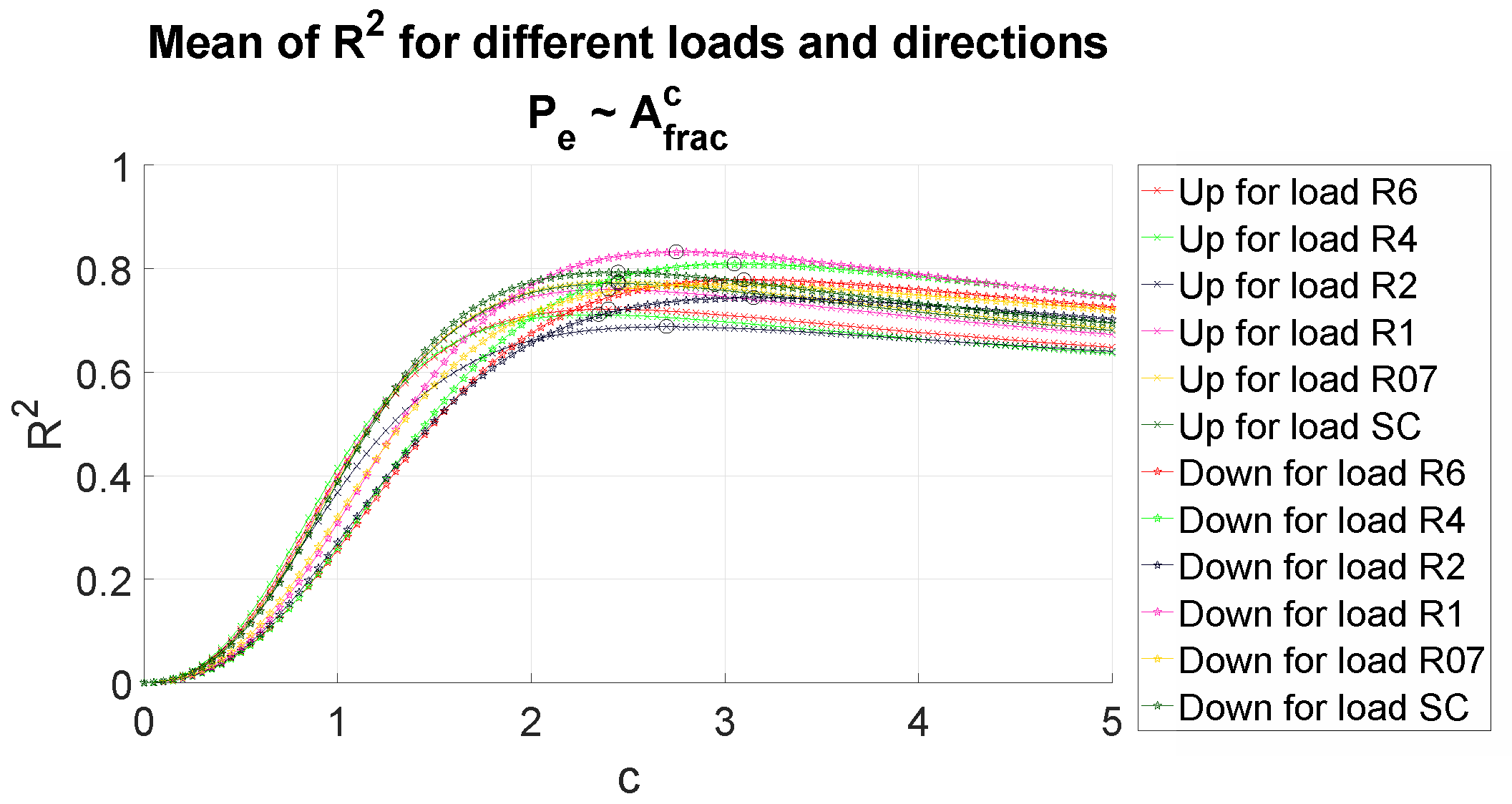
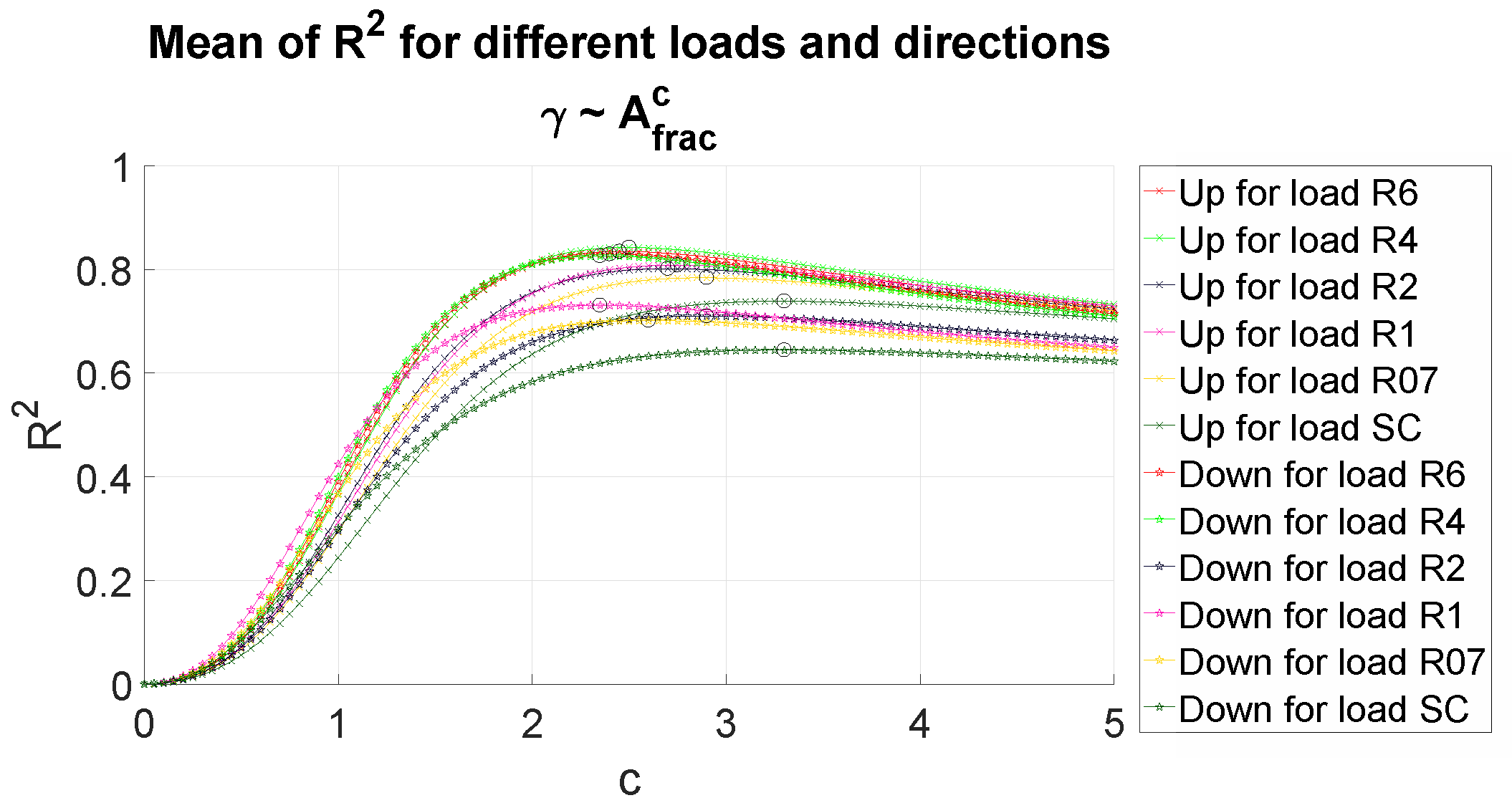
4.3. Linear Regression Analysis
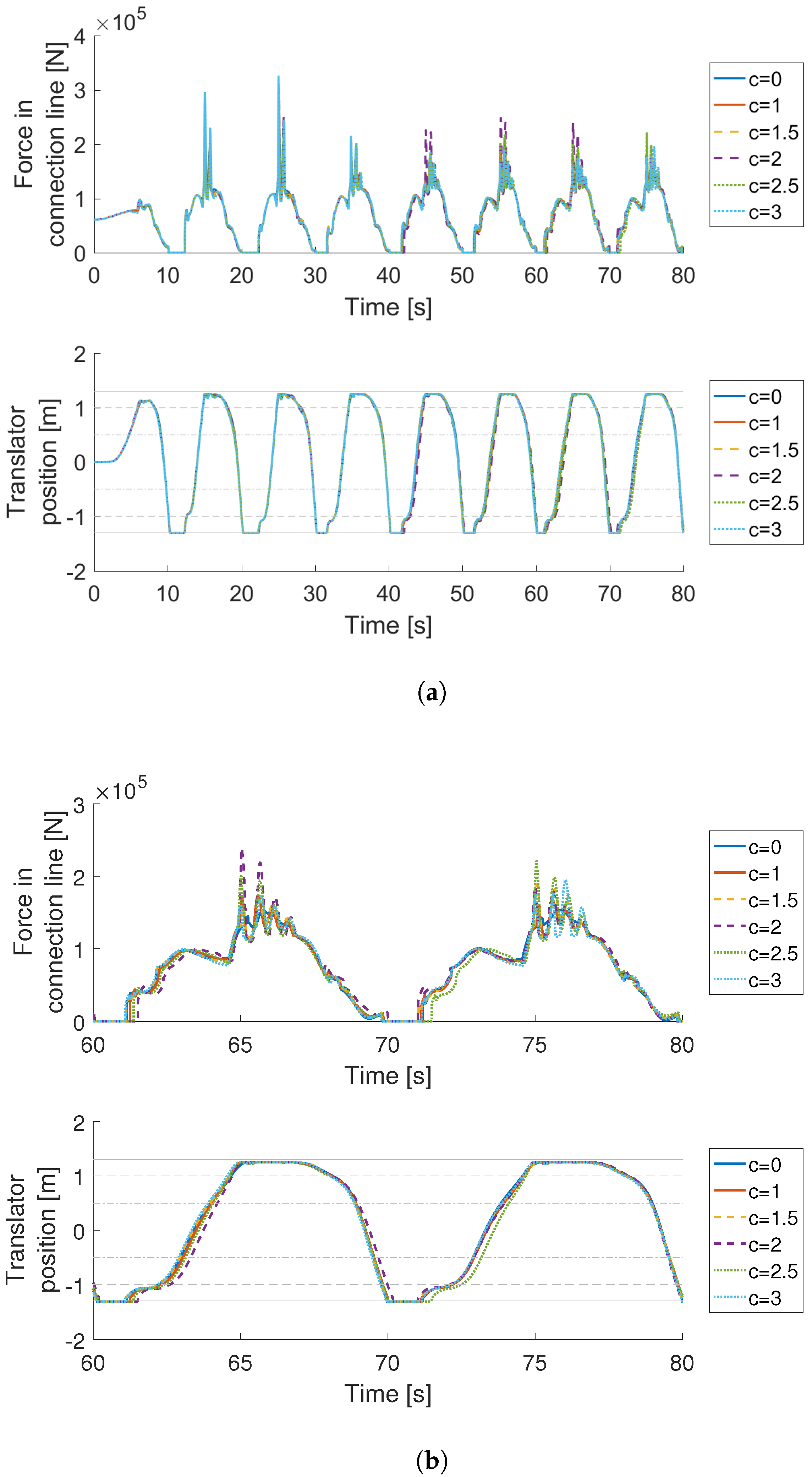
4.4. Case Study
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| DC | Direct Current |
| FEM | Finite Element Methods |
| LCR-meter | Inductance (L), Capacitance (C) and Resistance (R) meter |
| NL | No Load |
| PTO | Power Take-Off |
| RMS | Root Mean Square |
| S | Stator |
| SC | Short Circuit |
| T | Translator |
| WEC | Wave Energy Converter |
References
- Falcao, A.F.d.O. Wave energy utilization: A review of the technologies. Renew. Sustain. Energy Rev. 2010, 14, 899–918. [Google Scholar] [CrossRef]
- Drew, B.; Plummer, A.R.; Sahinkaya, M.N. A review of wave energy converter technology. Proc. Inst. Mech. Eng. Part A J. Power Energy 2009, 223, 887–902. [Google Scholar] [CrossRef]
- Cruz, J. Ocean Wave Energy: Current Status and Future Perspectives; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Ozkop, E.; Altas, I.H. Control, power and electrical components in wave energy conversion systems: A review of the technologies. Renew. Sustain. Energy Rev. 2017, 67, 106–115. [Google Scholar] [CrossRef]
- Tom, N.; Yeung, R.W. Performance Enhancements and Validations of a Generic Ocean-Wave Energy Extractor. J. Offshore Mech. Arct. Eng. 2013, 135, 041101. [Google Scholar] [CrossRef]
- Prudell, J.; Stoddard, M.; Amon, E.; Brekken, T.K.; Von Jouanne, A. A permanent-magnet tubular linear generator for ocean wave energy conversion. IEEE Trans. Ind. Appl. 2010, 46, 2392–2400. [Google Scholar] [CrossRef]
- Polinder, H.; Damen, M.E.; Gardner, F. Linear PM generator system for wave energy conversion in the AWS. IEEE Trans. Energy Convers. 2004, 19, 583–589. [Google Scholar] [CrossRef]
- Mueller, M.; Zavvos, A. Electrical generators for direct drive systems: A technology review. In Electrical Drives for Direct Drive Renewable Energy Systems; Mueller, M., Polinder, H., Eds.; Woodhead Publishing Limited: Oxford, UK, 2013; Chapter 1; pp. 3–29. [Google Scholar]
- Danielsson, O.; Thorburn, K.; Leijon, M. Direct Drive—Linear Generators. In Ocean Wave Energy; Cruz, J., Ed.; Springer: Berlin/Heidelberg, Germany, 2008; Chapter 6; pp. 220–240. [Google Scholar]
- Ekström, R.; Leijon, M. Control of offshore marine substation for grid-connection of a wave power farm. Int. J. Mar. Energy 2014, 5, 24–37. [Google Scholar] [CrossRef]
- Boström, C.; Ekergård, B.; Waters, R.; Eriksson, M.; Leijon, M. Linear Generator Connected to a Resonance-Rectifier Circuit. IEEE J. Ocean. Eng. 2013, 38, 255–262. [Google Scholar] [CrossRef]
- Boström, C.; Waters, R.; Lejerskog, E.; Svensson, O.; Stålberg, M.; Strömstedt, E.; Leijon, M. Study of a wave energy converter connected to a nonlinear load. IEEE J. Ocean. Eng. 2009, 34, 123–127. [Google Scholar] [CrossRef]
- Leijon, M.; Boström, C.; Danielsson, O.; Gustafsson, S.; Haikonen, K.; Langhamer, O.; Strömstedt, E.; Stålberg, M.; Sundberg, J.; Svensson, O.; et al. Wave energy from the North Sea: Experiences from the Lysekil research site. Surv. Geophys. 2008, 29, 221–240. [Google Scholar] [CrossRef]
- Prado, M.; Polinder, H. Direct drive wave energy conversion systems: An introduction. In Electrical Drives for Direct Drive Renewable Energy Systems; Mueller, M., Polinder, H., Eds.; Woodhead Publishing Limited: Oxford, UK, 2013; Chapter 8; pp. 175–194. [Google Scholar]
- Parwal, A.; Remouit, F.; Hong, Y.; Francisco, F.; Castellucci, V.; Hai, L.; Ulvgård, L.; Li, W.; Lejerskog, E.; Baudoin, A. Wave Energy Research at Uppsala University and the Lysekil Research Site, Sweden: A Status Update. In Proceedings of the 11th European Wave and Tidal Energy Conference, Nantes, France, 6–11 September 2015; pp. 1–10. [Google Scholar]
- Leijon, M.; Danielsson, O.; Eriksson, M.; Thorburn, K.; Bernhoff, H.; Isberg, J.; Sundberg, J.; Ivanova, I.; Sjöstedt, E.; Ågren, O.; et al. An electrical approach to wave energy conversion. Renew. Energy 2006, 31, 1309–1319. [Google Scholar] [CrossRef]
- Prado, M.; Polinder, H. Case study of the Archimedes Wave Swing (AWS) direct drive wave energy pilot plant. In Electrical Drives for Direct Drive Renewable Energy Systems; Mueller, M., Polinder, H., Eds.; Woodhead Publishing Limited: Oxford, UK, 2013; Chapter 9; pp. 195–218. [Google Scholar]
- Prado, M. Archimedes wave swing (AWS). In Ocean Wave Energy; Cruz, J., Ed.; Springer: Berlin/Heidelberg, Germany, 2008; Chapter 7; pp. 297–304. [Google Scholar]
- Ulvgård, L.; Sjökvist, L.; Göteman, M.; Leijon, M. Speed Dependent PTO Damping in a Linear Generator for Wave Power—Measured Damping and Simulated WEC Behaviour. J. Mar. Sci. Eng. 2017. in revision. [Google Scholar]
- Eriksson, M.; Waters, R.; Svensson, O.; Isberg, J.; Leijon, M. Wave power absorption: Experiments in open sea and simulation. J. Appl. Phys. 2007, 102. [Google Scholar] [CrossRef]
- Sjökvist, L.; Krishna, R.; Rahm, M.; Castellucci, V.; Anders, H.; Leijon, M. On the optimization of point absorber buoys. J. Mar. Sci. Eng. 2014, 2, 477–492. [Google Scholar] [CrossRef]
- Hai, L. Modelling Wave Power by Equivalent Circuit Theory. Ph.D. Thesis, Uppsala University, Uppsala, Sweden, November 2015. [Google Scholar]
- Hong, Y.; Eriksson, M.; Castellucci, V.; Boström, C.; Waters, R. Linear generator-based wave energy converter model with experimental verification and three loading strategies. IET Renew. Power Gener. 2015, 10, 349–359. [Google Scholar] [CrossRef]
- Boström, C.; Leijon, M. Operation analysis of a wave energy converter under different load conditions. IET Renew. Power Gener. 2011, 5, 245–250. [Google Scholar] [CrossRef]
- Rahm, M. Ocean Wave Energy: Underwater Substation System for Wave Energy Converters. Ph.D. Thesis, Uppsala University, Uppsala, Sweden, February 2010. [Google Scholar]
- Anderlini, E.; Forehand, D.L.; Bannon, E.; Abusara, M. Control of a Realistic Wave Energy Converter Model using Least-Squares Policy Iteration. IEEE Trans. Sustain. Energy 2017. [Google Scholar] [CrossRef]
- Chen, W.; Dolguntseva, I.; Savin, A.; Zhang, Y.; Li, W.; Svensson, O.; Leijon, M. Numerical modelling of a point-absorbing wave energy converter in irregular and extreme waves. Appl. Ocean Res. 2017, 63, 90–105. [Google Scholar] [CrossRef]
- Jung, S.; Yoo, Y.; Kim, H.; Lee, J.H.; Yoon, M.; Jang, G. Development of an active power reserve management method for DC applied wave-wind combined generation systems. Energies 2015, 8, 12488–12504. [Google Scholar] [CrossRef]
- Tyrberg, S.; Waters, R.; Leijon, M. Wave Power Absorption as a Function of Water Level and Wave Height: Theory and Experiment. IEEE J. Ocean. Eng. 2010, 35, 558–564. [Google Scholar] [CrossRef]
- Lejerskog, E.; Strömstedt, E.; Savin, A.; Boström, C.; Leijon, M. Study of the operation characteristics of a point absorbing direct driven permanent magnet linear generator deployed in the Baltic Sea. IET Renew. Power Gener. 2016, 10, 1204–1210. [Google Scholar] [CrossRef]
- Danielsson, O. Wave energy conversion: Linear Synchronous Permanent Magnet Generator. Ph.D. Thesis, Uppsala University, Uppsala, Sweden, October 2006. [Google Scholar]
- Ulvgård, L.; Sjökvist, L.; Göteman, M.; Leijon, M. Line Force and Damping at Full and Partial Stator Overlap in a Linear Generator for Wave Power. J. Mar. Sci. Eng. 2016, 4, 81. [Google Scholar] [CrossRef]
- Ekergård, B. Full Scale Applications of Permanent Magnet Electromagnetic Energy Converters. Ph.D. Thesis, Uppsala University, Uppsala, Sweden, October 2013. [Google Scholar]
- Ekström, R.; Ekergård, B.; Leijon, M. Electrical damping of linear generators for wave energy converters—A review. Renew. Sustain. Energy Rev. 2014, 42, 116–128. [Google Scholar] [CrossRef]
- Leijon, M.; Boström, C.; Eriksson, M. Electric Device and a Method for a Wave Power Plant. U.S. Patent 9048725 B2, 2 June 2015. [Google Scholar]
- Boström, C.; Ekergård, B.; Leijon, M. Electric resonance-rectifier circuit for renewable energy conversion. Appl. Phys. Lett. 2012, 100, 043511. [Google Scholar] [CrossRef]
- Ekergård, B.; Boström, C.; Hagnestål, A.; Waters, R.; Leijon, M. Experimental results from a linear wave power generator connected to a resonance circuit. Wiley Interdiscip. Rev. Energy Environ. 2013, 2, 456–464. [Google Scholar] [CrossRef]
- Soong, W. Inductance measurements for synchronous machines. Power Eng. Brief. Note Ser. 2008. Available online: http://www.eleceng.adelaide.edu.au/research/power/pebn/ (accessed on 22 November 2017).
- Frost, A.; Ulvgård, L.; Sjökvist, L.; Eriksson, S.; Leijon, M. Experimental Study of Generator Damping at Partial Stator Overlap in a Linear Generator for Wave Power. In Proceedings of the 12th European Wave and Tidal Energy Conference Series (EWTEC), Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Sjökvist, L.; Wu, J.; Ransley, E.; Engström, J.; Eriksson, M.; Göteman, M. Numerical models for the motion and forces of point-absorbing wave energy converters in extreme waves. Ocean Eng. 2017, 145, 1–14. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Height of the hull | 600 | cm |
| Length of the translator | 277 | cm |
| Length of the stator | 178 | cm |
| Number of phases | 3 | - |
| Number of sides | 9 | - |
| Pole width | 35 | mm |
| Height of pole shoe | 19 | mm |
| Height of permanent magnet | 15 | mm |
| Remanence of permanent magnets | 0.45 | T |
| Air gap | 3 | mm |
| Rated Speed | 0.7 | m/s |
| Voltage peak-to-peak at rated speed, no load, L-L | 663 | V |
| Equipment | Unit | |
|---|---|---|
| Force transducer | DynaLink 7200 | |
| - Range | 25 | tonne |
| - Accuracy: | 0.1 | % F.S. |
| Signal amplifier | GSV-1A | |
| - Output signal | 4–20 | mA |
| - Bandwidth (−3 dB) | 10 | kHz |
| Accelerometer | Murata SCA620 | |
| - Range | ±1.7 | g * |
| - Accuracy: | ±4 | % F.S. |
| - Bandwidth (−3 dB) | 50 | Hz |
| Signal amplifier | XTR115UA | |
| - Output signal | 4–20 | mA |
| - Input CR filtering | 775 | Hz |
| Voltage probes | TESTEC TT-SI 9001 | |
| - Range | ±700 | V |
| - Accuracy | ±2 | % of F.S. |
| Current probes | Tektronix 622 | |
| - Range | ±100 | A |
| - Accuracy | ±4 | % of F.S. |
| Data acquisition | NI cRIO 9012 | |
| Module | NI 9203 | |
| - Sampling frequency | 1 | kHz |
| - Range | ±10 | mA |
| - Resolution | 16 | bit |
| - Accuracy | 1.05 | % of F.S. |
| Load | No Load | 6.6 | 4.4 | 2.2 | 1.1 | 0.73 | Short Circuit |
|---|---|---|---|---|---|---|---|
| Label | NL | R6 | R4 | R2 | R1 | R07 | SC |
| Up: | 0.53 | 0.38 | 0.49 | 0.56 | 0.56 | 0.53 | 0.54 |
| Down: | 0.59 | 0.58 | 0.59 | 0.59 | 0.60 | 0.61 | 0.53 |
| Logarithmic Values | Range of c | ||||
|---|---|---|---|---|---|
| Phase 1 | - | 1.4–2.6 | - | 1.7–2.7 | |
| Per phase: | Phase 2 | - | 1.3–2.7 | - | 1.7–2.8 |
| Phase 3 | - | 1.5-2.6 | - | 1.9–2.7 | |
| Total power: | 1.1–1.7 | 1.1–2.1 | 2.3–3.3 | 2.4–3.2 | |
| c | 0 | 1.0 | 1.5 | 2.0 | 2.5 | 3 |
|---|---|---|---|---|---|---|
| Energy yield (Wh) | 384.1 | 369.7 | 365.2 | 363.7 | 352.4 | 352.4 |
| Maximum end-stop force (kN) | 240.0 | 279.5 | 293.8 | 317.4 | 317.5 | 325.9 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Frost, A.E.; Ulvgård, L.; Sjökvist, L.; Eriksson, S.; Leijon, M. Partial Stator Overlap in a Linear Generator for Wave Power: An Experimental Study. J. Mar. Sci. Eng. 2017, 5, 53. https://doi.org/10.3390/jmse5040053
Frost AE, Ulvgård L, Sjökvist L, Eriksson S, Leijon M. Partial Stator Overlap in a Linear Generator for Wave Power: An Experimental Study. Journal of Marine Science and Engineering. 2017; 5(4):53. https://doi.org/10.3390/jmse5040053
Chicago/Turabian StyleFrost, Anna E., Liselotte Ulvgård, Linnea Sjökvist, Sandra Eriksson, and Mats Leijon. 2017. "Partial Stator Overlap in a Linear Generator for Wave Power: An Experimental Study" Journal of Marine Science and Engineering 5, no. 4: 53. https://doi.org/10.3390/jmse5040053
APA StyleFrost, A. E., Ulvgård, L., Sjökvist, L., Eriksson, S., & Leijon, M. (2017). Partial Stator Overlap in a Linear Generator for Wave Power: An Experimental Study. Journal of Marine Science and Engineering, 5(4), 53. https://doi.org/10.3390/jmse5040053