We first discuss the hindcast of the Point Wells oil spill, including some discussion of the regional oceanography as it may apply to other oil spills. We then discuss the differences between GNOME and BLOSOM.
4.1. Hindcasting the Historical Foss Point Well Spill
Further physical information will be needed to confirm our findings, however, we are able to make some compelling suggestions regarding what drove the Point Wells oil spill, insight that, to our knowledge, had so far remained elusive.
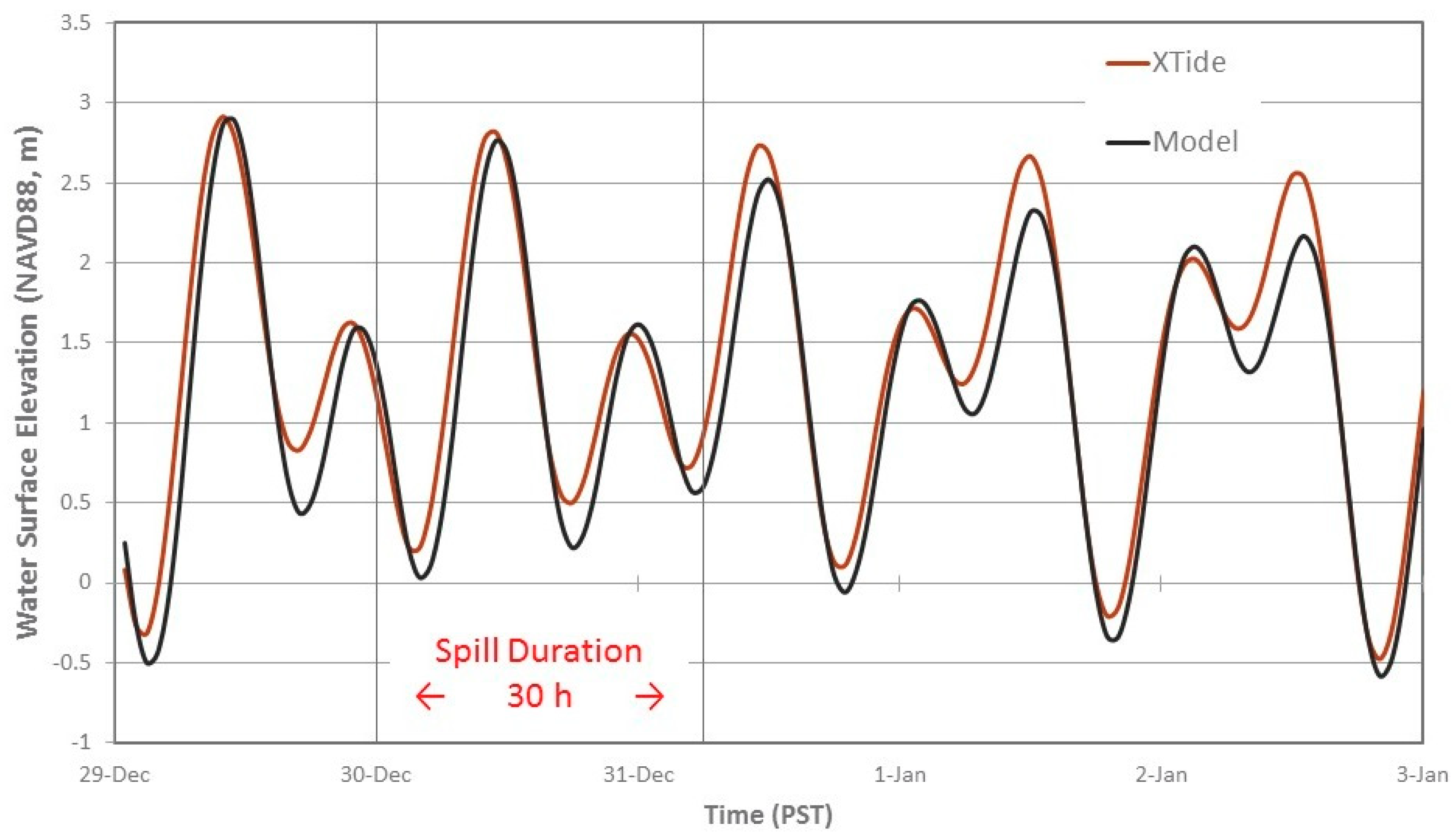
The trajectories are mainly forced with an accurate representation of the tides (which is a major driver of ocean currents in our region;
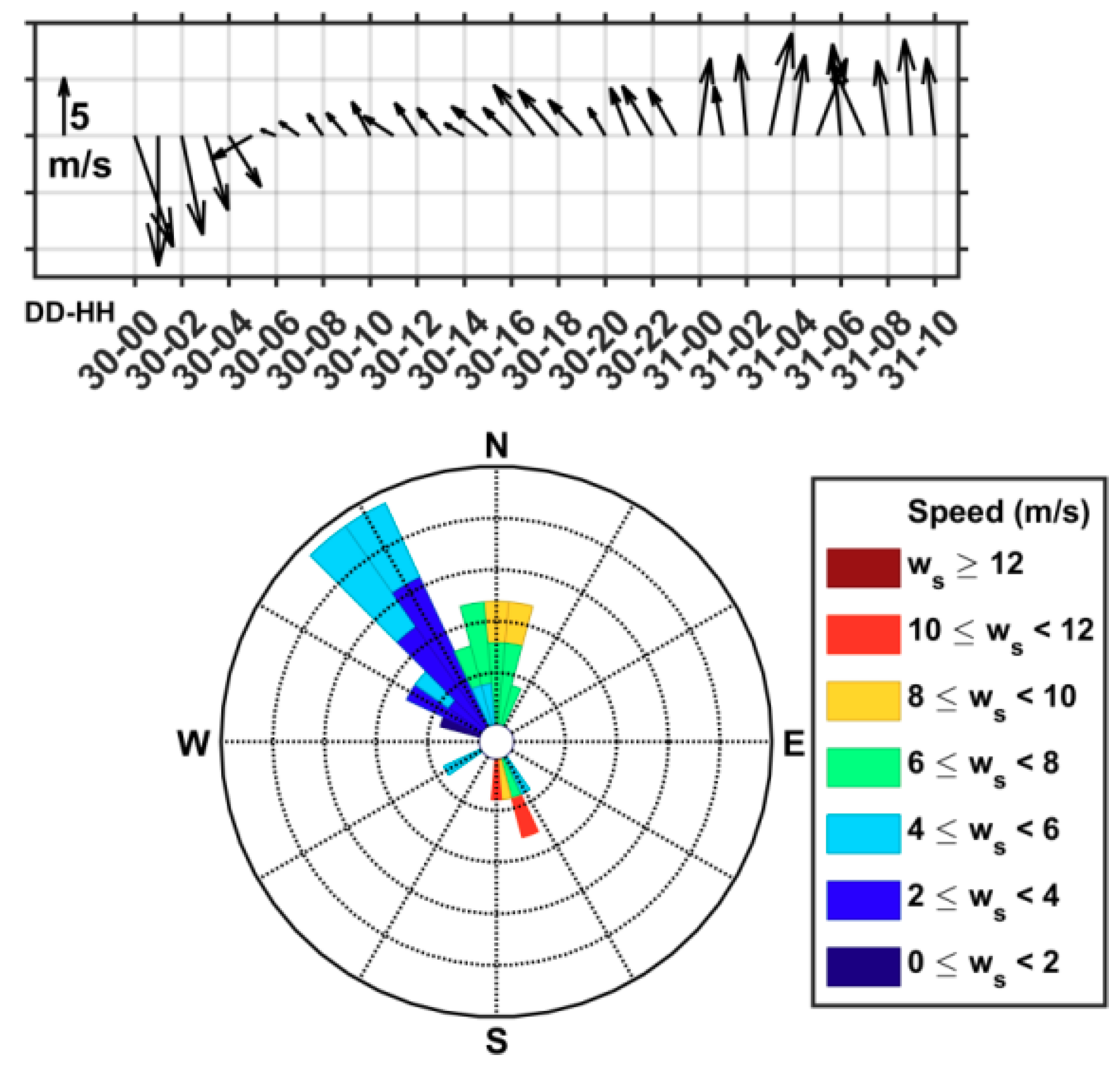
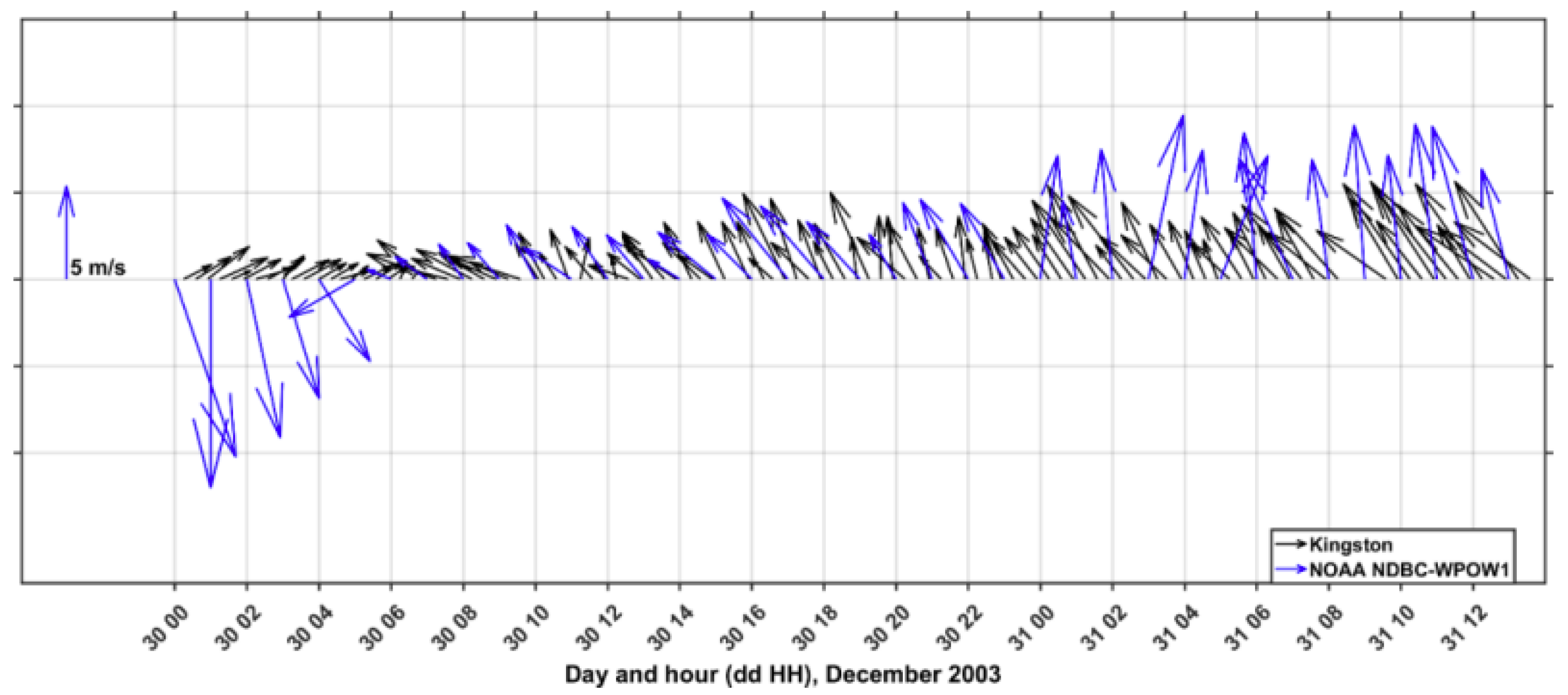
Figure 6), as well as observed measurements of the wind velocity (
Figure 7 and
Figure 8). A quick inspection of the wind speeds during the spill, immediately suggest that wind was a major driver for the Point Wells spill: Meier and Höglund [
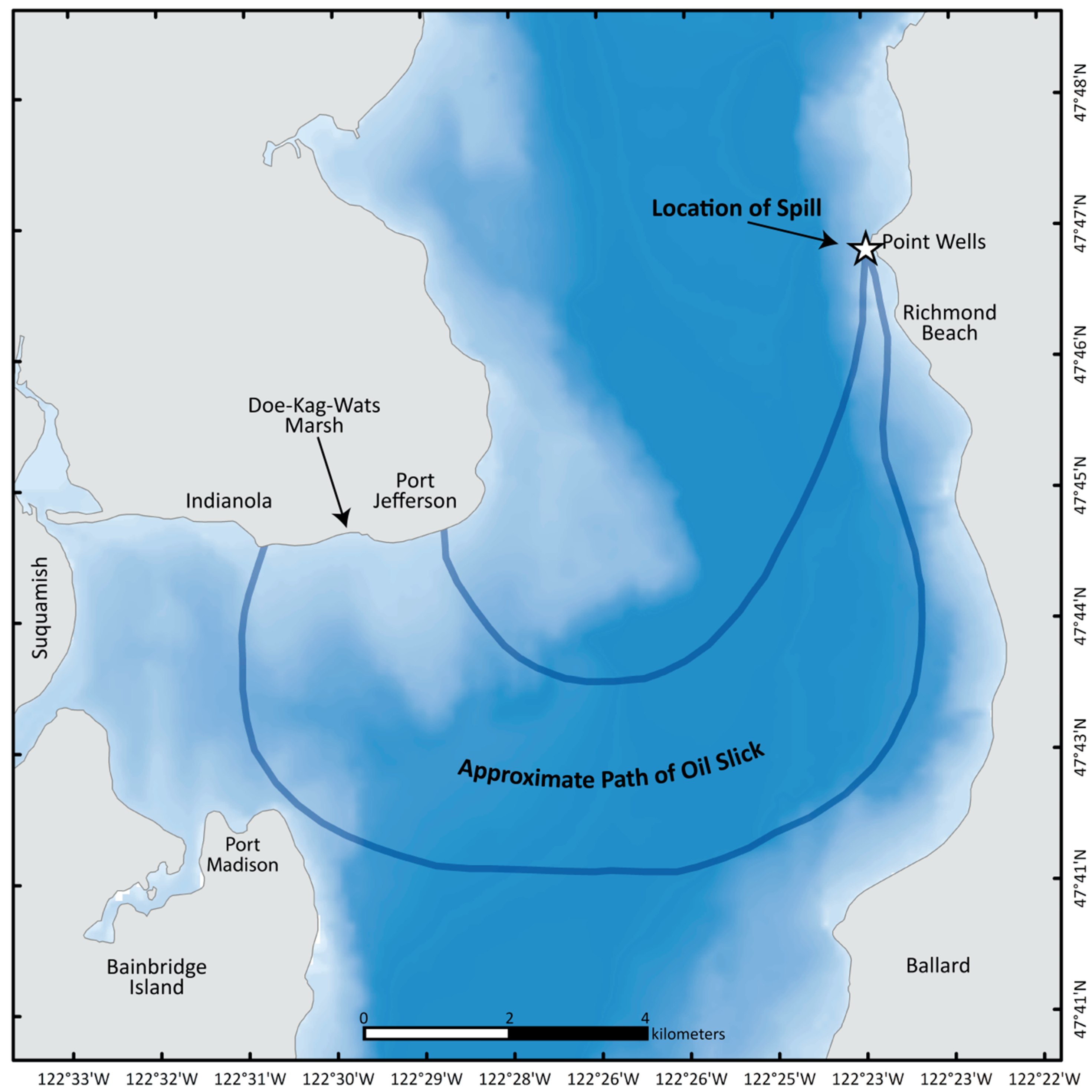
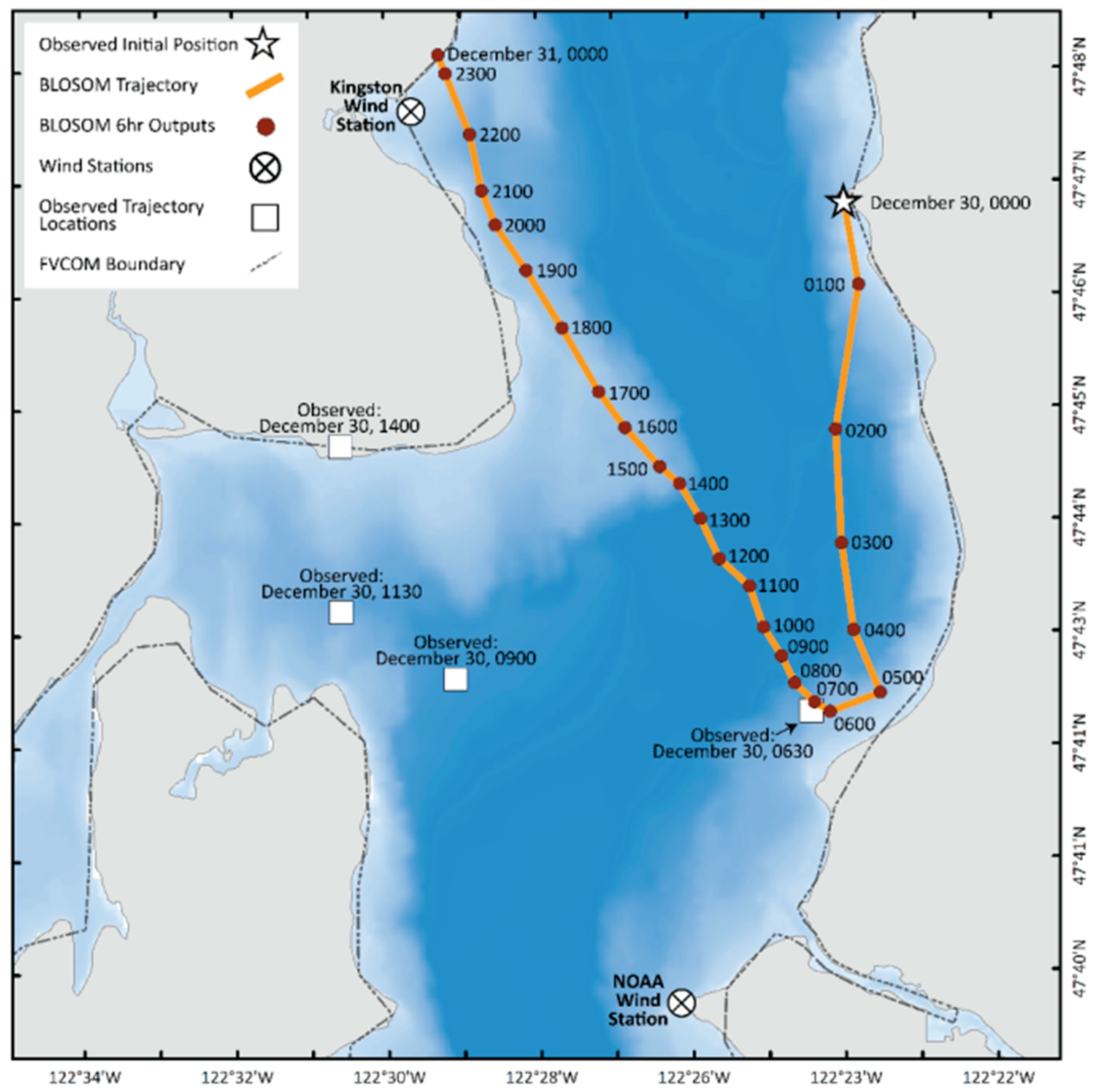
23] (pp. 101–129) show that the advection of oil at the very surface tends to be dominated by wind whenever wind speeds reach or exceed about 4 m/s. Indeed, the trajectory of a parcel initiated at the location and time of the spill, and forced with only wind, is quite suggestive of the actual path (
Figure 9).
Under these circumstances, the advection of oil at the surface is often successfully modeled as a linear combination of ocean currents at the surface, and a velocity derived from wind, often called wind drift or windage. A wind drift velocity is typically calculated as a coefficient of 3%, multiplying the wind velocity. However, there are two points to be made regarding this general statement:
(1) Main components of ocean currents at the surface typically include a geostrophic component; in our case, this is likely well represented by the tidal motion from our FVCOM model, and a wind-driven component that is independent of the wind drift mentioned above. The wind-driven current is given by some representation of the turbulent transfer of momentum from wind to the ocean’s surface. The solution to this problem is an ocean current that spirals while decaying exponentially with depth; it is, therefore, very sensitive to its vertical dependence.
(2) Determining a correct wind drift coefficient is not trivial, the difficulties arise from a wide variety of ambient and dynamical considerations, some of which are discussed in Duran [
21]. However, that is not the end of the list. As an additional example: naturally occurring surfactant has been shown to increase the wind speed drift velocity by 25% [
24]. If we consider a typical wind drift coefficient of 0.03, then, under the influence of surfactant, the wind drift speed, computed from the wind speed U, becomes 0.03U(1 + 0.25) = 0.0375U. This illustrates naturally occurring phenomena, that would be very difficult to detect without in situ measurements, and that would increase the effective wind drift coefficient from 3 to almost 4%. This is as far as windage is concerned, however, additional processes, such as Stokes drift, Coriolis–Stokes force, and Langmuir circulation, are often parameterized directly from the wind velocity as well, and using a similar parameterization (e.g., Weisberg et al. [
25], and references therein).
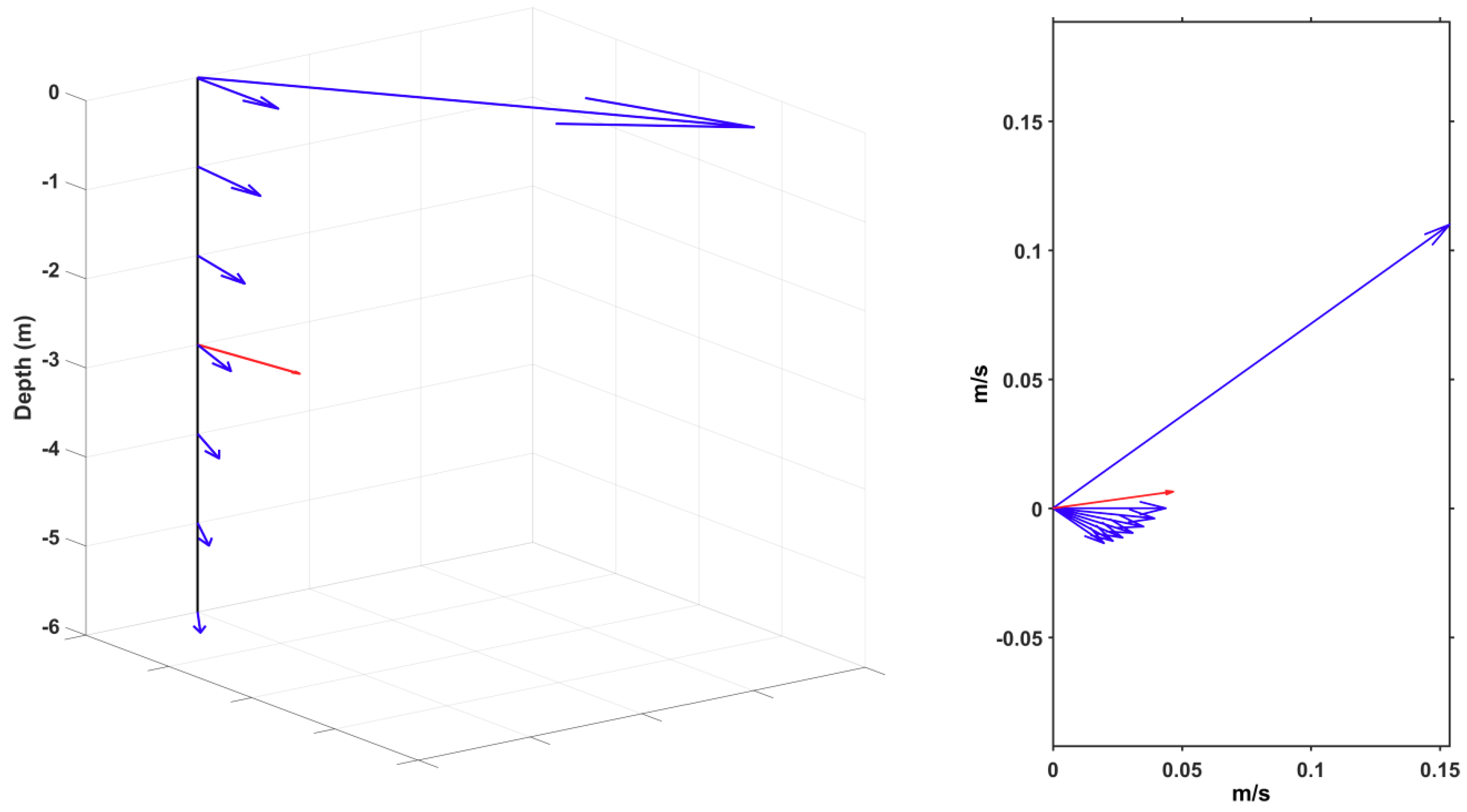
In
Appendix A.3, we show that the model we use has coarse vertical resolution, and therefore, underestimates the wind-driven component of the sea-surface velocity by about a factor of four. We show this using a simplified analytical model, which is in good agreement with very high-resolution observations of vertical shear in ocean surface currents [
26]. To compensate, a wind-driven velocity is directly parameterized from the wind, in the same way that a wind-drift velocity would be parameterized (see e.g., the surface velocity in
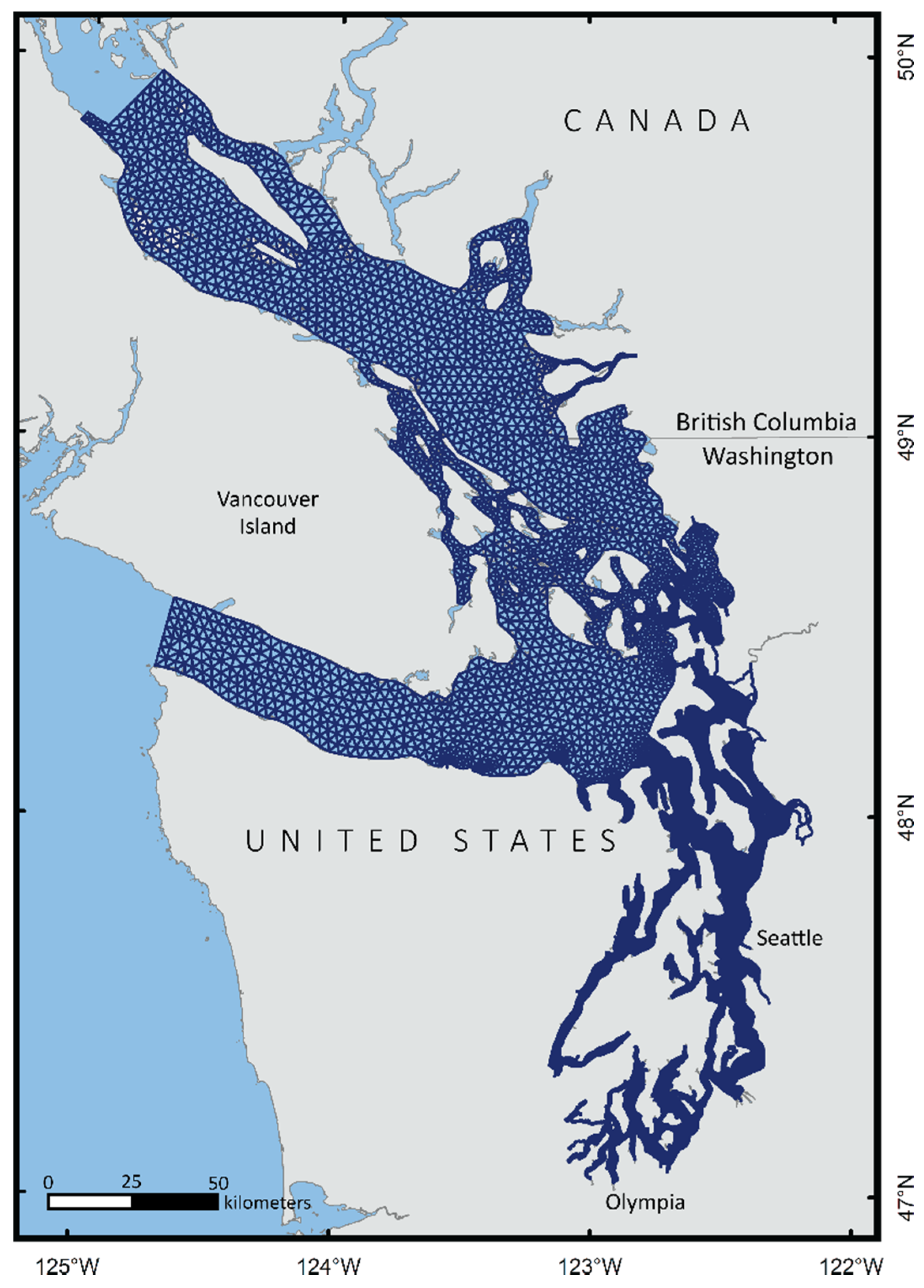
Figure A1). As mentioned above, the FVCOM model used in this study does an excellent job of simulating tides (
Figure 5), however, for Lagrangian transport applications we can recommend a higher resolution near the surface to better resolve the turbulent transfer of momentum near the surface. This is because solutions for the turbulent transfer of momentum, from wind to the ocean, decay exponentially with depth, and are therefore sensitive to a coarse vertical resolution. Near the sea surface, the vertical resolution for ocean models used to simulate Lagrangian transport should be maximized, and is typically on the order of tens of centimeters (e.g., [
27,
28,
29]), in marked contrast with the 4 to 6 m resolution of the uppermost layer of the model used for this study (except very near the coast, where the vertical resolution is higher). Indeed, even high vertical ocean model resolutions will need further parameterizations at times, since ocean models to not typically represent processes such as wind drift or Stokes drift. A natural follow up study towards calibrating this model for sea-surface trajectories could compare our results with an FVCOM implementation that uses a higher vertical-resolution, while continuing to simulate tides with a high skill.
In our study, a relatively high wind coefficient of 6%, in conjunction with the tide-driven ocean currents, cause the simulated trajectory to match the observed trajectory in time and space (
Figure 14). We do not find the high value for the wind coefficient surprising, because we are almost surely parameterizing at least two processes, the underestimated wind-driven current and windage. The former parameterization is remediating a coarse vertical resolution, while the latter is not typically included in ocean models, yet, is often a main driver when wind speed exceeds 4 m/s. It is also possible that additional wind-related processes (e.g., Stokes drift, Coriolis–Stokes force and/or Langmuir circulation) were at play. All of these processes can be parameterized with the same or a similar parameterization, a coefficient multiplying the wind velocity with a slight deflection to the right of the wind direction. Thus, the 6% coefficient likely represents at least two, perhaps more processes. Future studies should include detailed information, or at least a parameterization, of the processes related to surface waves, so as to gain insight to their role during this spill. We note that although Stokes drift is related to surface gravity waves, it can be effectively parameterized as a percentage of the local wind [
30].
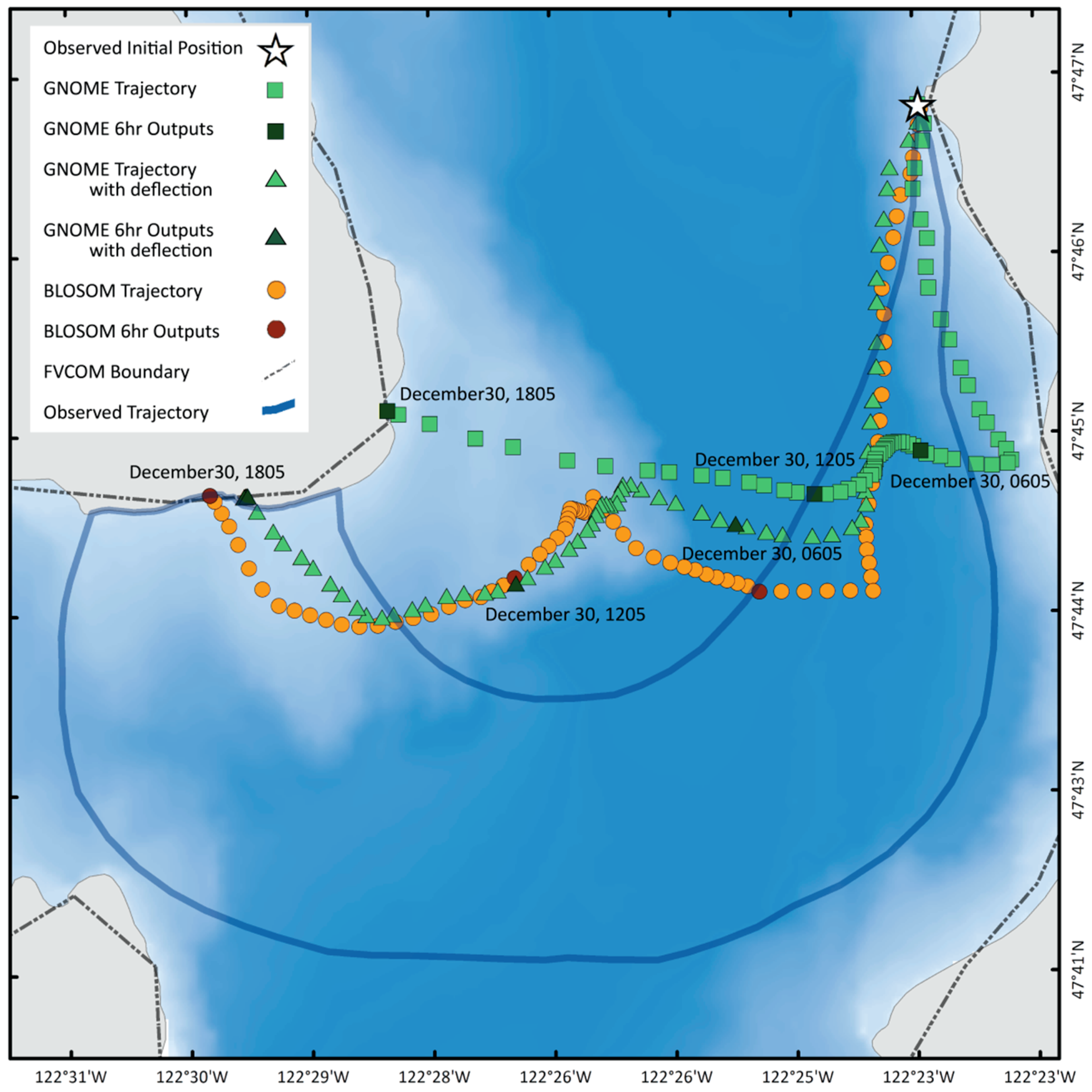
The inclusion of an angle of deflection for the parameterization of wind-driven processes was consequential in the hindcast of this oil spill. In this case, the angle computed internally by the default BLOSOM algorithm [
21] did well. However, as discussed in Duran [
21], the actual value of deflection does vary according to a number of conditions, making it difficult to simulate accurately. It is therefore recommended to have an option that allows the oil spill modeler to select an angle manually. Such an approach would allow the user to select an angle that matches observations, similar to the approach with the diffusion coefficient where the user selects a value to match the spread observed through overflights, satellite images or boat reports [
9]. An example of an oil spill where wind drift was also very important, but where no deflection angle was appropriate, is given in Nakata et al. [
31]. The value of 3.5% for the windage coefficient that they used, is consistent with our discussion, since their ocean upper layer was only 2 m deep, compared to the upper layer of the model we used, which is two to three times thicker (4–6 m).
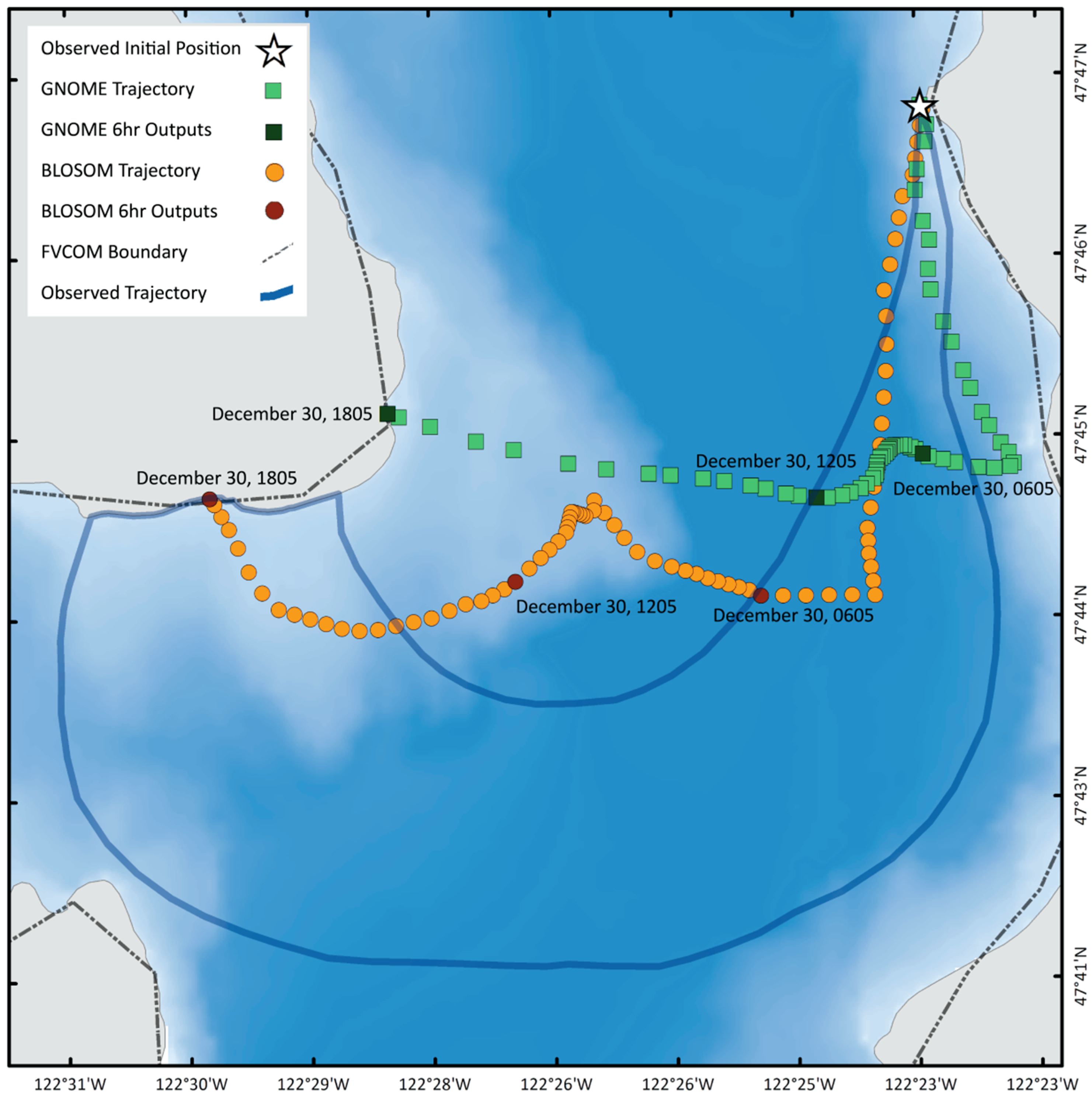
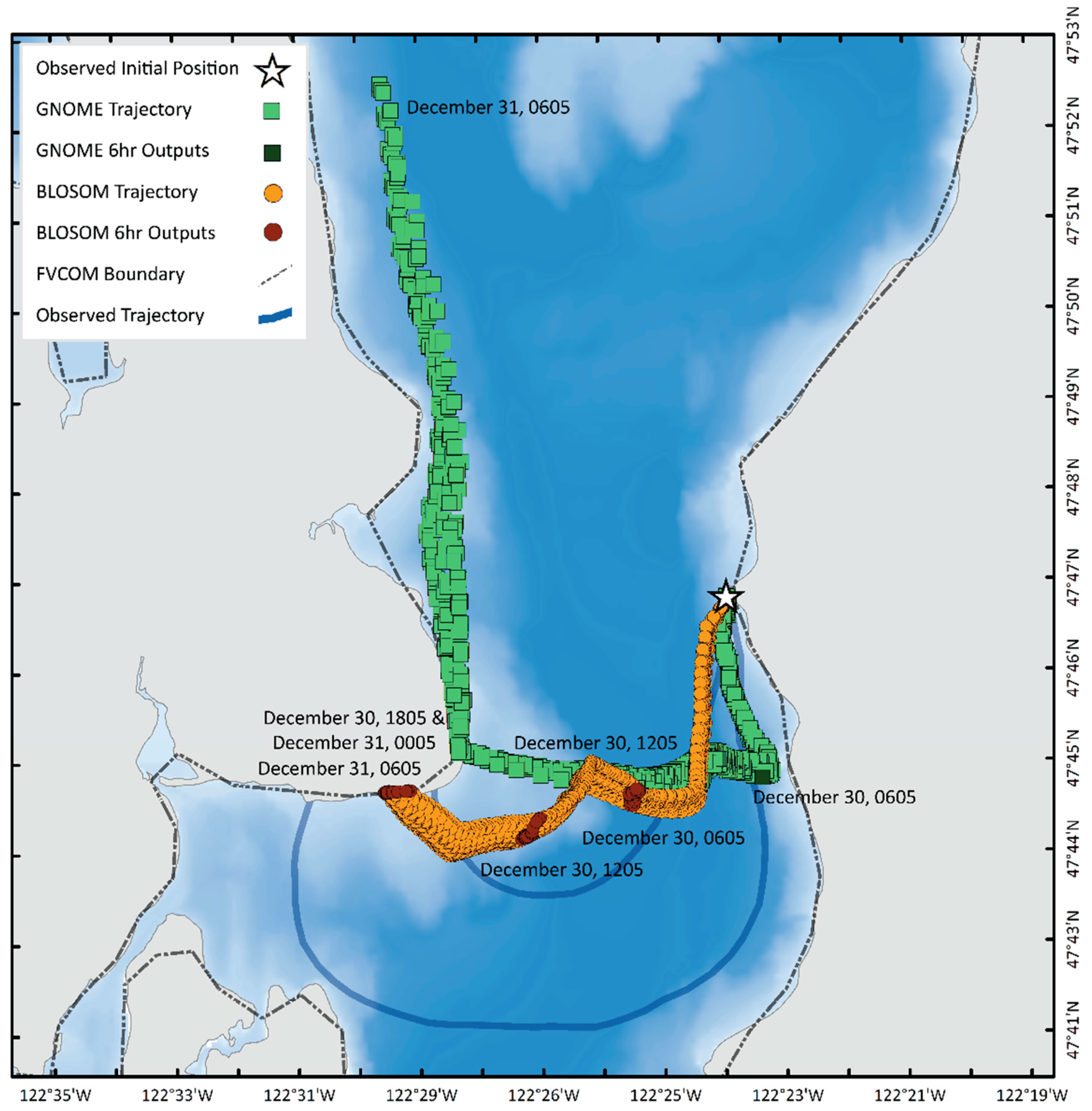
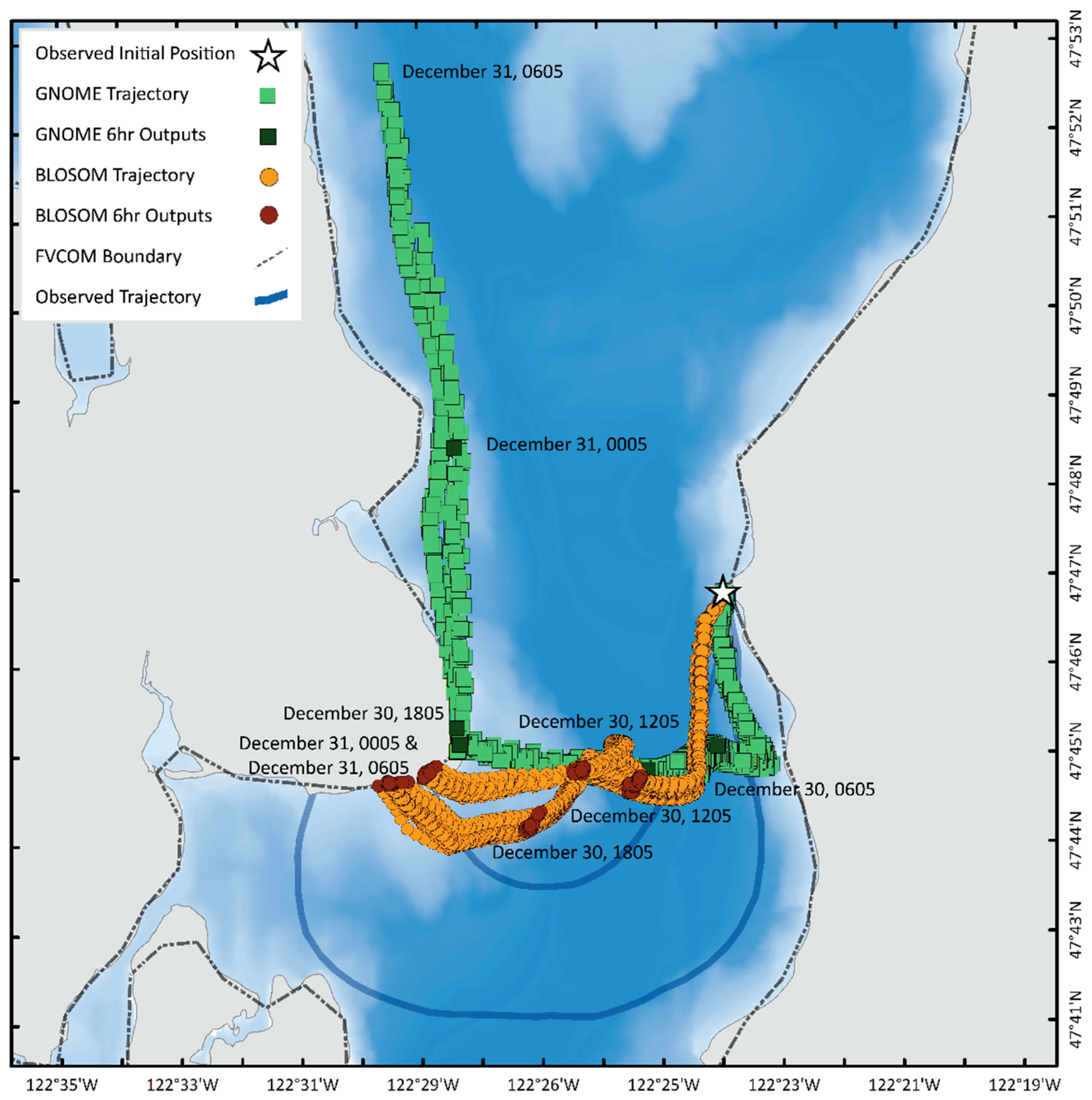
When including deflection due to earth’s rotation, tides, and a wind advection coefficient of 6% of the wind speed, the simulated trajectory does a good job of replicating the trajectory observed with overflights. The trajectory tends to hit the correct locations at the right times, although a bit too north during the first six hours of the simulation, and a few hours late after the first twelve hours (see BLOSOM’s trajectory in
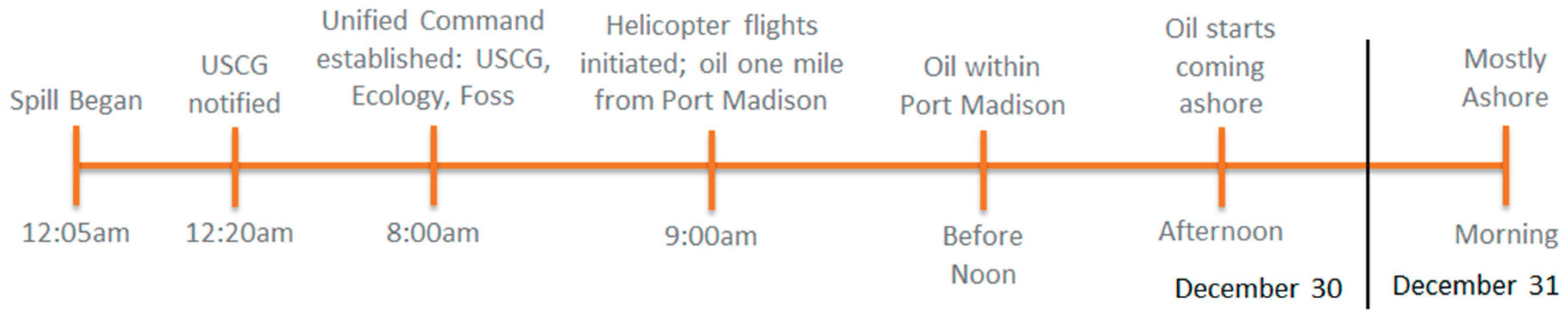
Figure 12). Thus, BLOSOM’s trajectory matches the observed path both in time and space, as can be seen by comparing to the timelines in
Figure 1 and
Figure 9. The agreement strongly suggests that wind and tides were the major drivers during the 2003 Point Wells spill. This is because we are using observed winds (
Figure 8), and because the tidal component of the ocean currents is almost perfectly simulated with the FVCOM model we use (
Figure 6). Indeed, the trajectory forced only with 6% of the wind (
Figure 9), is highly suggestive. Additionally, diffusion representing unresolved small-scale processes, helped match the observed spreading along that trajectory (
Figure 19 and
Figure 20). It thus seems persuasive that winds, tides, and small-scale processes were the physical drivers during the 2003 Point Wells spill.
In the test where trajectories were initiated offshore from where the oil spill occurred and with no wind (
Figure 16A), the cross-shore transport was due to eddies that spin off when the tidal currents interact with promontories (not shown). Thus, we have found two processes that may cause cross-shelf channel in our study region: cross-channel wind and eddies.
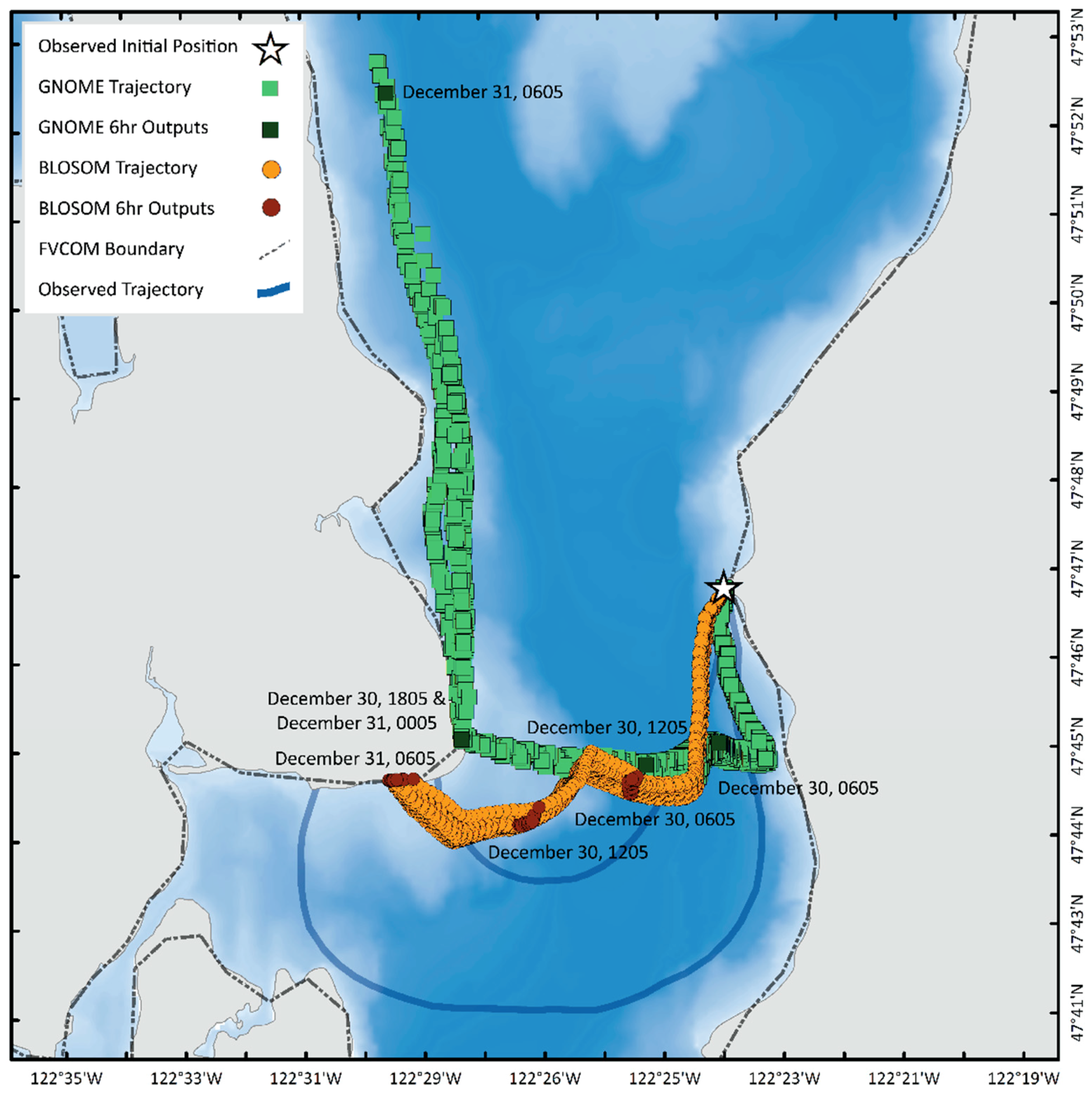
4.5. Differences in Beaching Algorithms
Test 5 was designed to understand differences in beaching algorithms. GNOME includes a refloat option based on an empirical parameter (half-life) that describes the adhesiveness of the oil to the shoreline. This half-life parameter is the number of hours in which half the oil on a given shoreline is expected to be removed with offshore wind or turbulent diffusion [
9]. The spill described by Nakata et al. [
31] is an example where the refloating of oil was important.
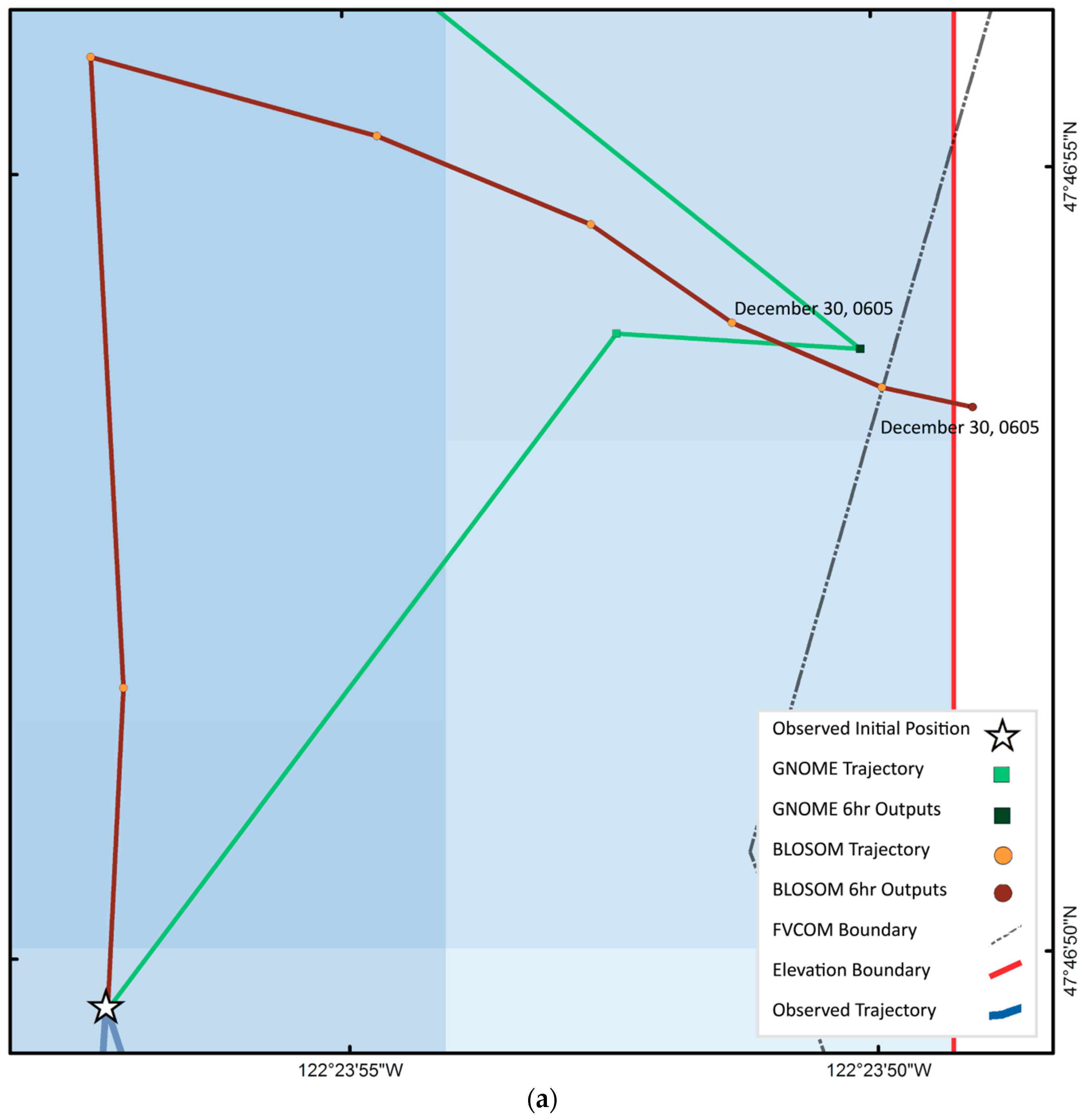
Based on results from test 4, and to make the trajectories directly comparable, wind deflection was introduced manually to the wind data for GNOME, thus, both models include wind deflection; likewise, BLOSOM uses temporal interpolation. We note that an additional difference between the models that affects beaching, is that GNOME uses the ocean model boundary as the coastline while BLOSOM uses an elevation raster provided by the user. In this test, the wind advection coefficient is reduced from 6% to a more typical value of 3%, therefore, this test also helps illustrate what a modeler would see, when using a typical value for the wind advection coefficient (
Figure 15a). The trajectories diverge probably due to an initial perturbation caused by the additive effect of the different integration geometries detailed in tests one and two, that is amplified by the ocean currents (
Figure 15b); however, both models end up beaching at similar locations (
Figure 15a). A more in-depth discussion on coastline treatment for oil spill model beaching can be found in Samaras et al. [
22]. It is important to note that neither GNOME nor BLOSOM are designed to simulate beaching with the level of detail that can be found in other pioneering studies. GNOME, in particular, is intended as a quick response tool, consequently, the beaching location is only approximated (
Figure 15a). In
Appendix A.2, we show that the number of particles we use for the diffusion tests (30 and 1000) are reasonable regarding the type, and dimension, of beach that was impacted. Calculations with 30 particles suggests that, if a detailed beaching study were desired, a greater number of particles might be needed. However, we also note that trajectories, especially GNOME’s, may deteriorate considerably as the number of particles increases, as noted below (
Section 4.7). Thus, there is a trade-off to be made. For our purposes (a study that is primarily focused on the oil’s trajectory), 30 particles gives good results, while maintaining reasonable oil holding capacity (OHC) values (
Appendix A.2).
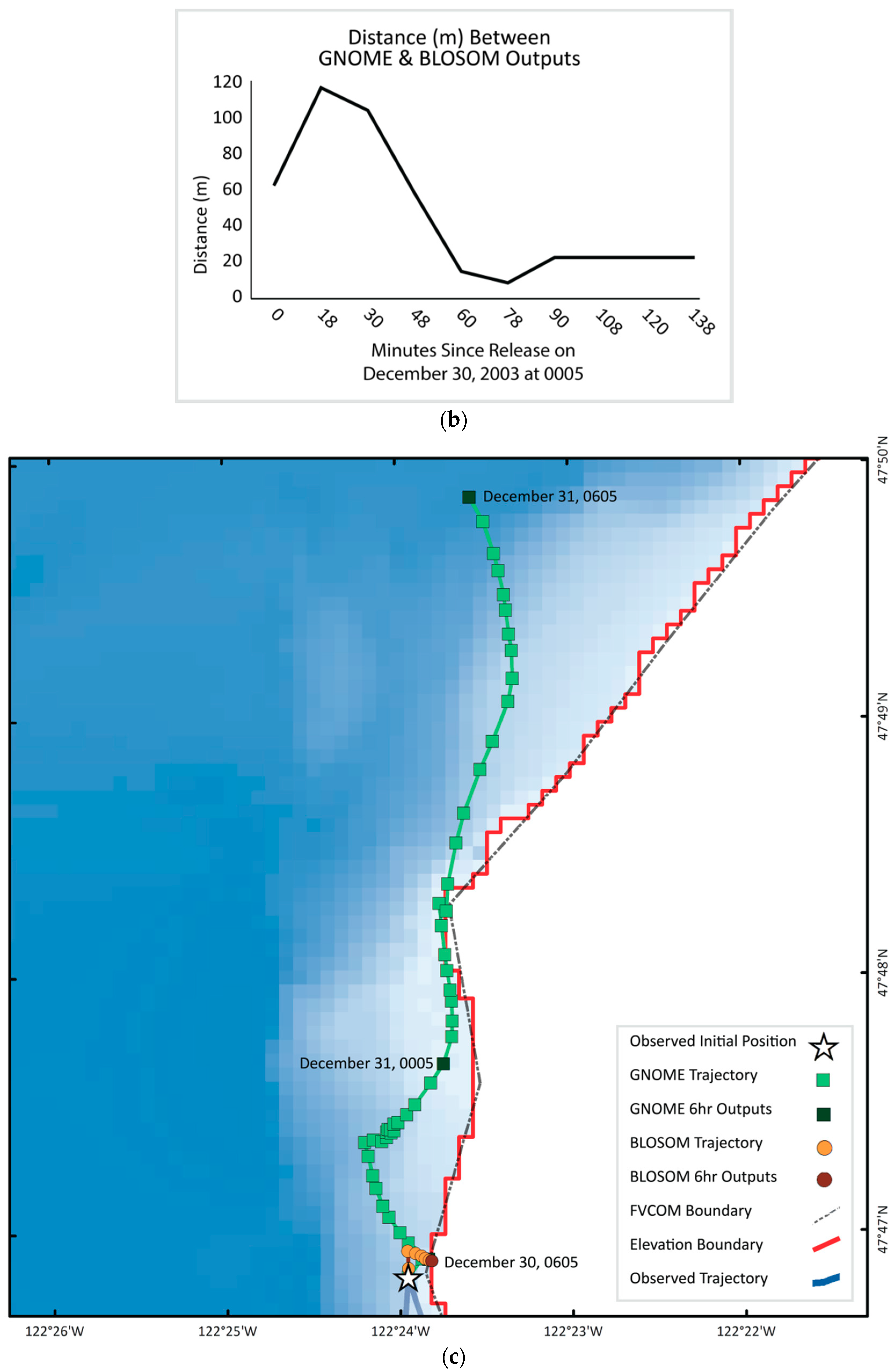
After about eighteen hours, GNOME’s trajectory initiates again after refloating, to then move north (
Figure 15c). In a real-life situation, both GNOME’s and BLOSOM’s simulation would be rejected, since they do not replicate the observed path, suggesting that the mechanisms forcing these trajectories are inadequate.
During a response scenario, the refloating of oil can be modeled alternatively by re-initializing an oil spill simulation once a need has been detected (for example, through overflights). Thus, BLOSOM does not contemplate, at present, the inclusion of a refloating option in future releases.
4.6. Sensitivity to Initial Position
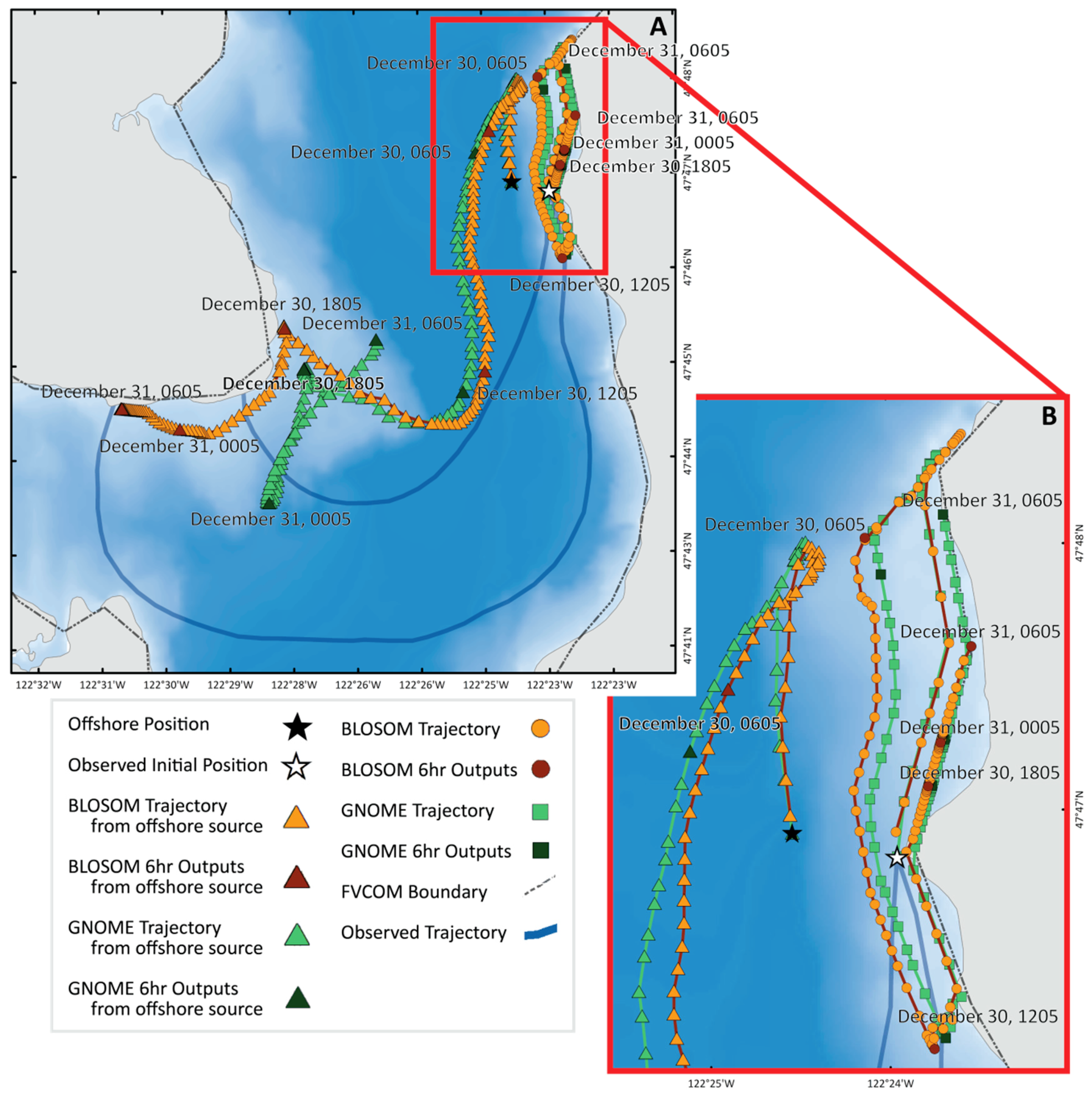
In test 6, we explore initializing the trajectories offshore from the actual incident locations, about 730 m offshore and 165 m north. These trajectories do cross the channel even without any wind, a marked difference from the trajectories using the correct initial position (
Figure 16A).
To put this initial location offset into context, ocean models in the Gulf of Mexico are often 3 to 4 km resolution, with the higher-resolution models having resolutions of about 1 km. Thus, the correct and the offset initial locations, could have been within the same ocean model grid point of a high-resolution model of the Gulf of Mexico. However, the Salish Sea has much smaller spatial scales, and therefore requires a much finer ocean model. Thus, the distance between the actual and offset locations of the spill, spans about 4 ocean model grid cells. This is an example of the sensitivity to the initial location, a result of ocean currents varying considerably across the channel. As mentioned above, ocean currents are often unstable, and amplify exponentially any small, initial difference in the initial position [
36,
37]
BLOSOM and GNOME differ in their final positions when the trajectories are initiated at the offshore location. This illustrates how small differences in oceanic trajectories can cause a large difference in the end result. This is because ocean currents are chaotic at length scales that are often smaller than the distance traveled by most trajectories of interest, which implies that small differences at any time during the trajectory can be exponentially amplified, causing distinct differences even within a few hours (see e.g., [
36] or [
37]). This test does not include any wind forcing, thus, the small differences (that eventually resulted in larger differences) can be attributed to the distinct geometries used in the ocean current integration, as illustrated in test 1. Exponential separation of trajectories is generally not relevant in bulk trajectory computations, especially when using a random component to simulate small-scale processes.
The trajectories initiated offshore do not coincide with the observed trajectory envelope (
Figure 16A). Since a trajectory can only be judged to be accurate if it visits the correct spatial locations at the correct times, BLOSOM’s trajectory, in this test, is an example of getting the correct result (i.e., correct beaching location, although about 14 h late) for the wrong reasons (i.e., by initiating the trajectory offshore from the actual initial location).
In this test, we also run a simulation in which the trajectories are initialized at the correct location but, in contrast with test 5, without wind forcing (
Figure 16B). In this case, the trajectories are not forced towards the coast as fast as in test 5, instead, they oscillate with the tides, approximately parallel to the coastline to then beach not far from where the spill originated. This confirms that no wind, or typical values of wind forcing, are inadequate to force this oil spill, given the ocean model used in this study, as discussed above.
4.7. Turbulent Diffusion: Number of Particles
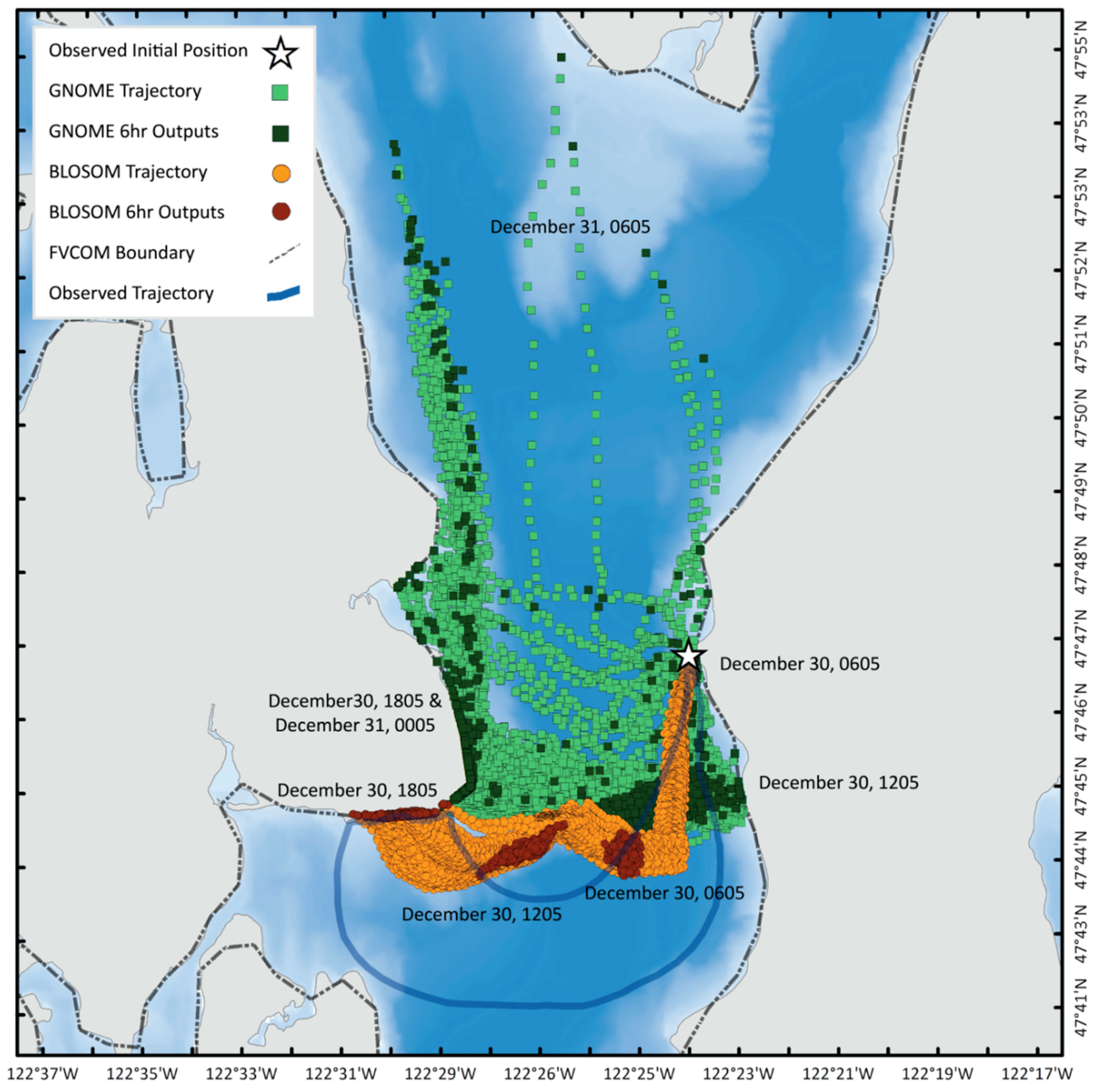
Tests one through six suggest what physical processes drove the Point Wells oil spill trajectory, namely, ocean currents plus 6% of wind, as illustrated in test three. Having identified appropriate ambient forcing, the next step a modeler would typically pursue, would be to add turbulent diffusion in an attempt to match the spread of pollutants, ideally along an observed trajectory envelope. In this test, BLOSOM does not use temporal interpolation and GNOME does not include wind deflection; these features were only added, respectively, in previous tests to understand the model’s differences. However, having illustrated such differences, and because these features, respectively, are not currently available in the oil spill models, the simulations that follow will use default configurations.
In BLOSOM and GNOME simulations, the spread due to diffusion is controlled mainly by the diffusion coefficient, which both models allow the user to select. However, the spread is also affected by the number of particles used. If there are not enough particles, then the random walk algorithm will not represent the correct solution to the diffusion equation.
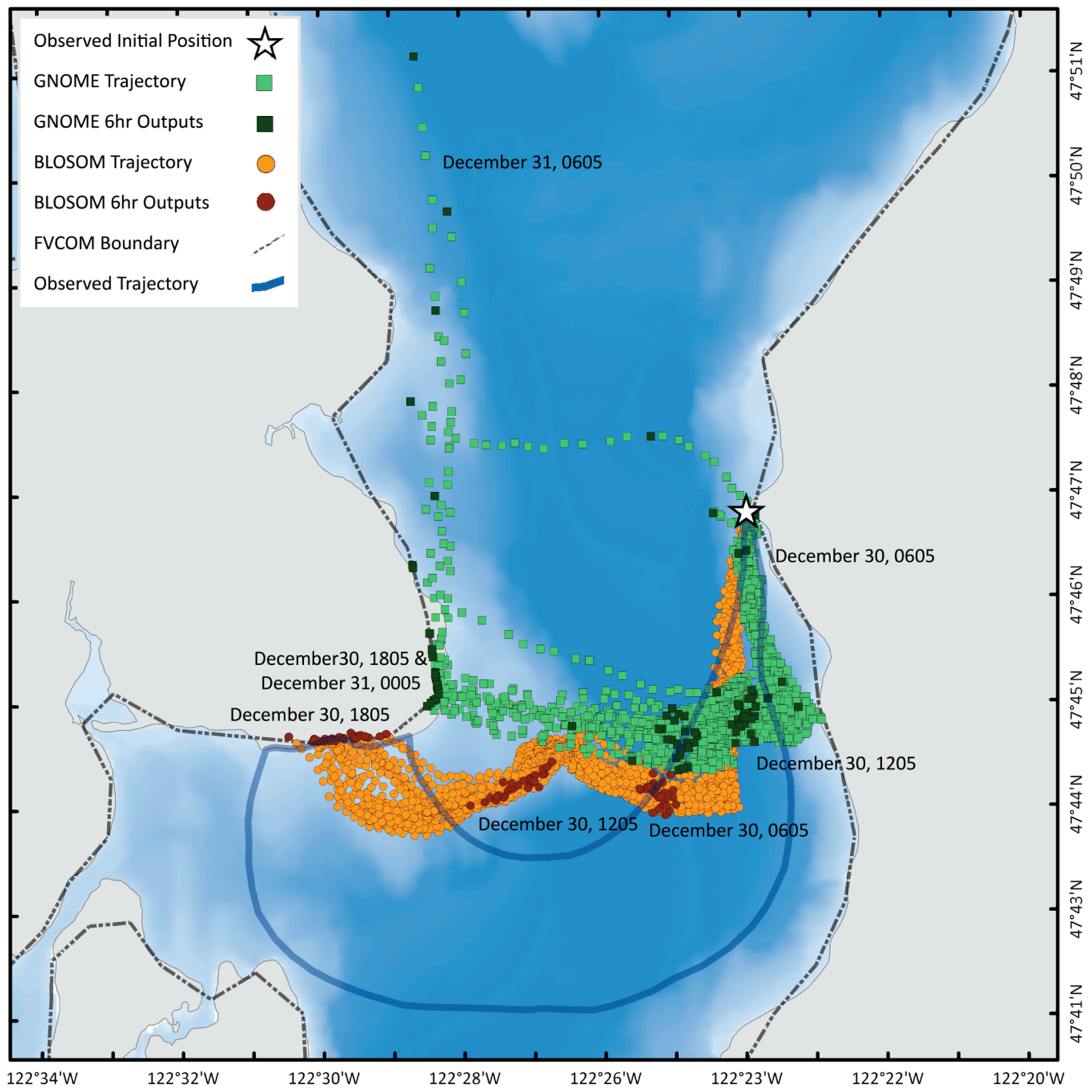
In test 7, a fixed diffusion coefficient of 10,000 cm
2/s and 30 particles are selected. The turbulent spreading causes oil parcels to cover more of the area that was observed to be covered, providing an accurate estimate of the beaching, thus nudging the simulations towards greater realism (
Figure 17). We note that the higher the number of particles, the greater the amounts of oil refloating in GNOME’s simulation, causing spurious northward transport.
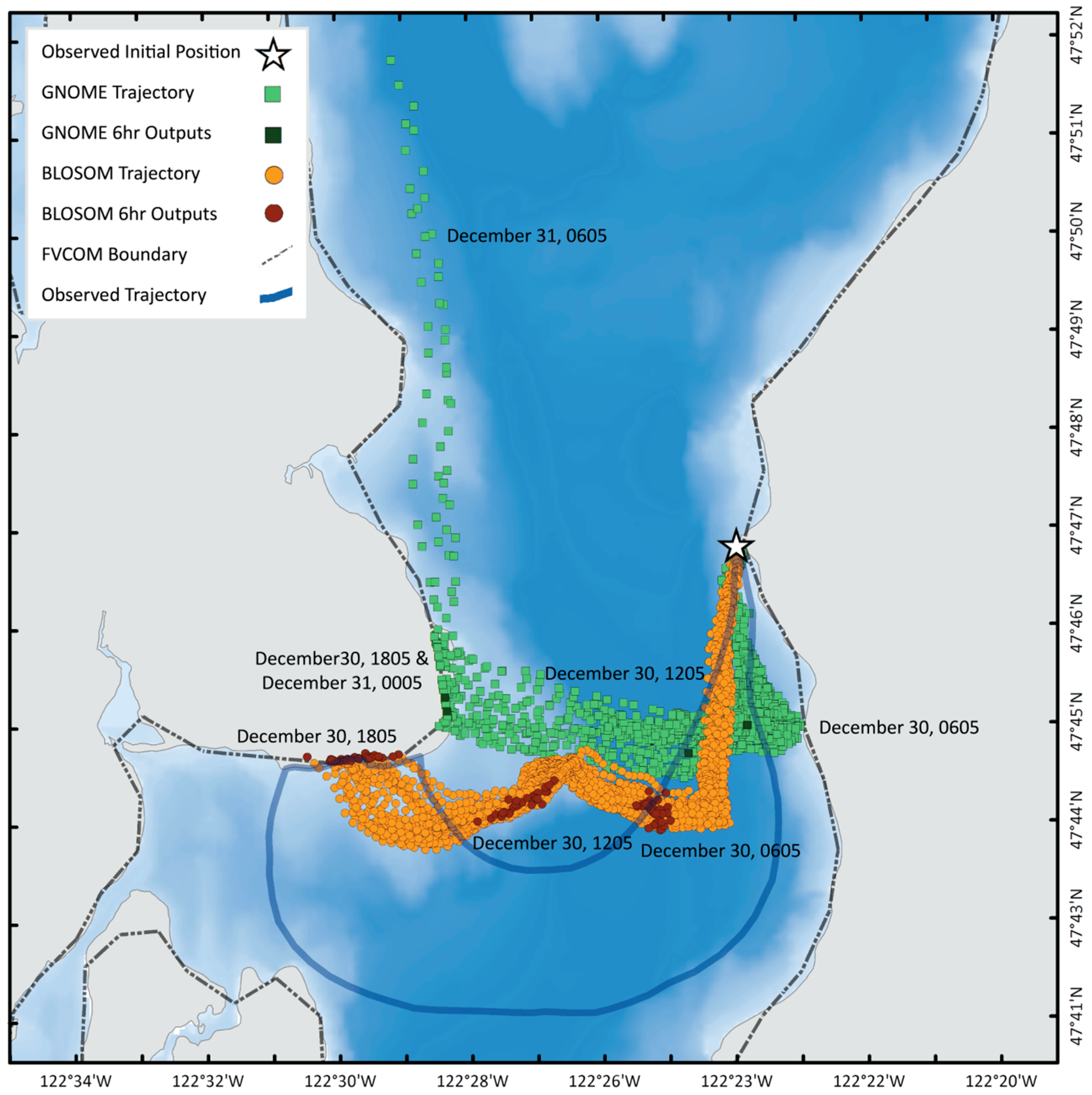
To assess the effect of the number of particles, this experiment is repeated while using 1000 particles (
Figure 18). In this test, GNOME’s trajectories diverge even further from the observed path, and the spread becomes less realistic, suggesting that 1000 particles is not an improvement. BLOSOM, however, does reach a desirable spread, suggesting that with 1000 particles, there is a modest improvement; note the width of BLOSOM’s beaching approximately matching the observed width in
Figure 18.
These results highlight the importance of simulating the diffusion-free trajectory as accurately as possible.
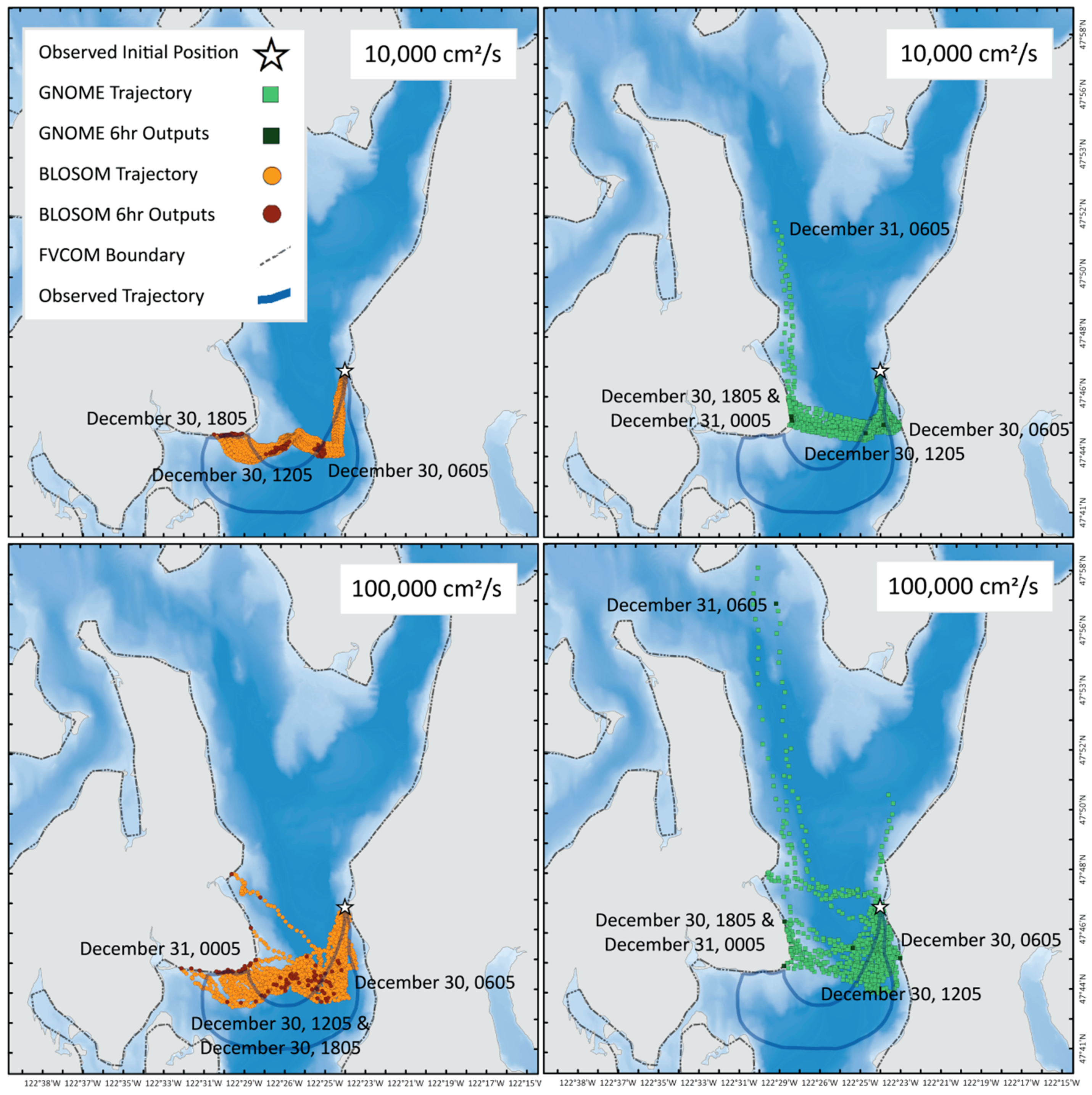
4.9. Turbulent Diffusion: Diffusion Coefficient
In test 9, the diffusion coefficient is tested by using different values, while keeping the number of particles at 30. A coefficient of 100,000 cm
2/s causes the spread to be closer to the width of the observed path envelope (
Figure 20), suggesting an improvement relative to a diffusion coefficient of 10,000 cm
2/s and 30 particles (
Figure 17), but it is not necessarily an improvement relative to BLOSOM’s simulation with a coefficient of 10,000 cm
2/s and 1000 particles (
Figure 18). Since a smaller turbulent diffusion coefficient is preferable (if the same results can be obtained by increasing the number of particles), the conclusion is that a coefficient of about 10,000 cm
2/s and 1000 particles is the preferred setting for BLOSOM. Some fine-tuning is likely possible by testing numbers of particles between 10 and 100 thousand, but was not pursued.
Regarding GNOME’s trajectories for both values of diffusion coefficients, the more significant factor continues to be that the trajectory does not match the observed path, due to not including the effect of earth’s rotation when forcing with wind, as identified in test three. More trajectories diverge when using the 100,000 cm2/s coefficient; these differences are inherent to the random walk algorithm and are therefore expected. Therefore, beyond the differences found in test 3 and test 7 (rebeaching of oil), this test does not find any further noteworthy differences between GNOME and BLOSOM.
This test finalizes the simulations that a modeler would need to understand what simulation parameters best replicate the Point Wells oil spill. Consequently, all relevant differences between GNOME and BLOSOM have been illustrated.

 ,
, 




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}