Experimental Study on 2D Motion Characteristics of Submerged Floating Tunnel in Waves



Abstract
1. Introduction
2. Experimental Setup
2.1. Experimental Facility
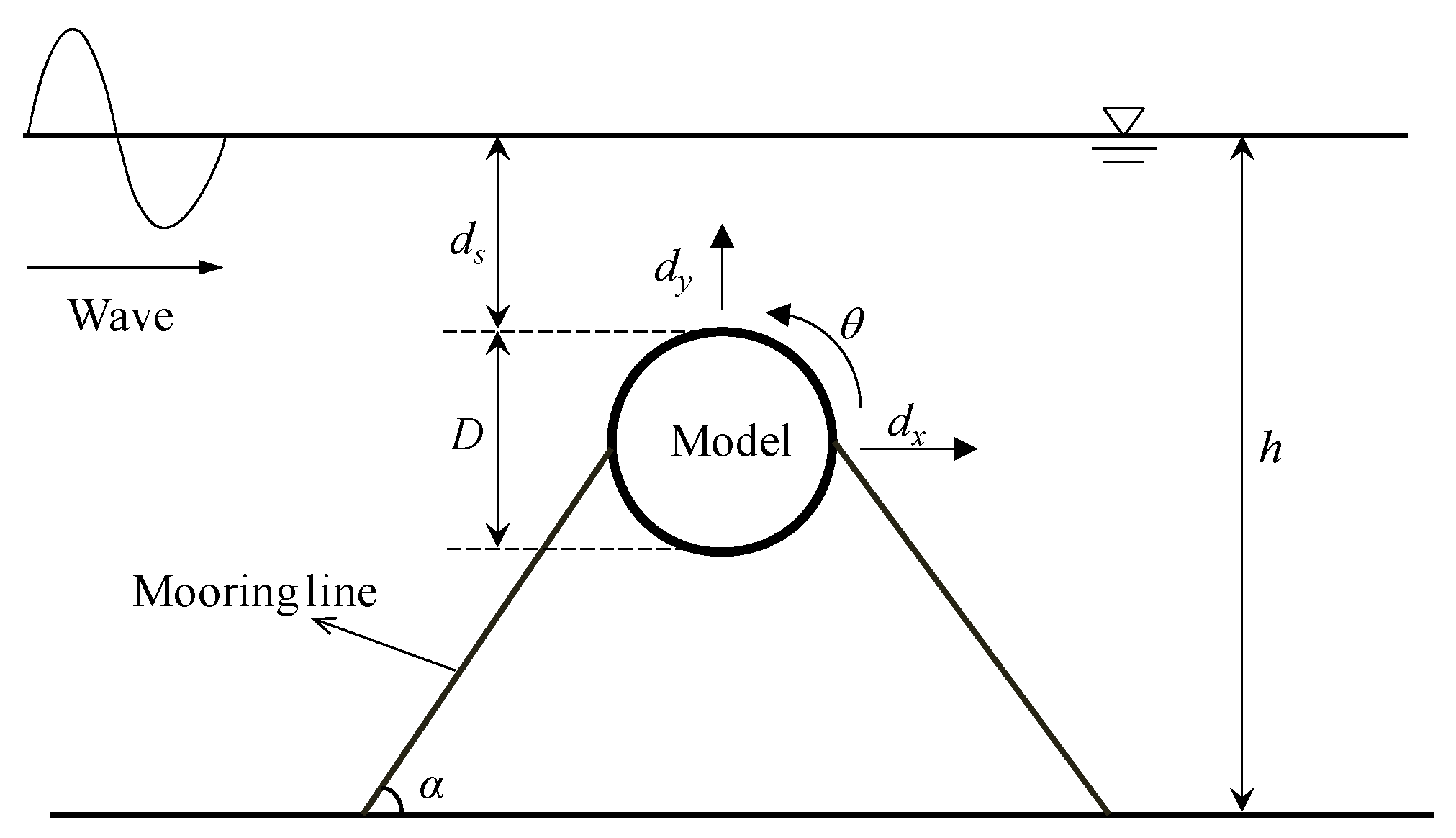
2.2. Parameters Definition
2.3. Experimental Condition
2.4. Motion Analysis Method
- (1)
- Load video file
- (2)
- Retrieve video frames
- (3)
- Create time stamp of the frames
- (4)
- For each frame:
- a
- Isolate the tracker
- b
- Calculate centroid and storing values
- (5)
- Scale values to real distances
- (6)
- Export data
3. Results and Discussion
3.1. Structural Dynamic Characteristics
3.2. Observation of SFT Motion
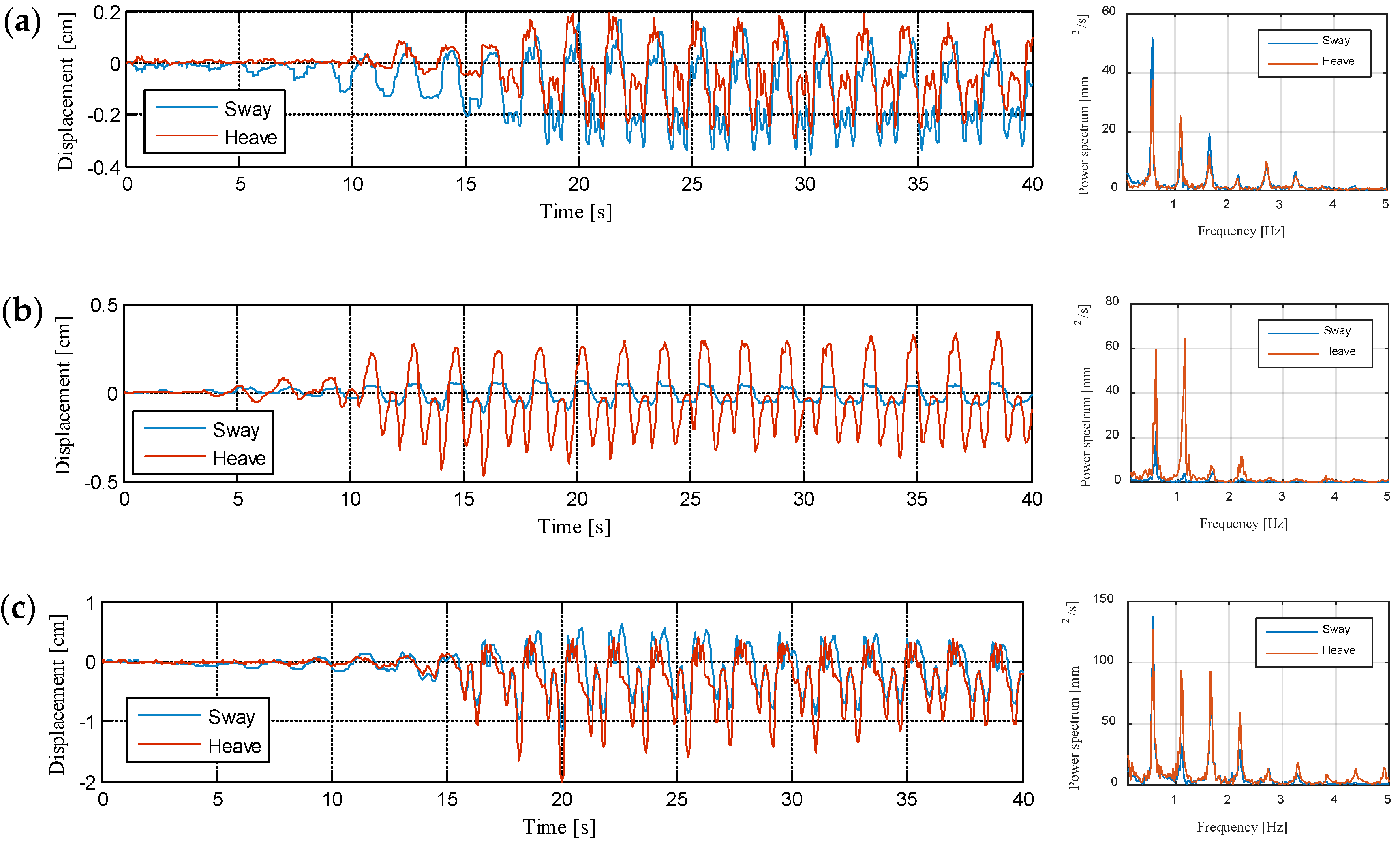
3.3. Time Series and Spectral Analysis of Motion Characteristics
3.4. Influencing Parameters Analysis
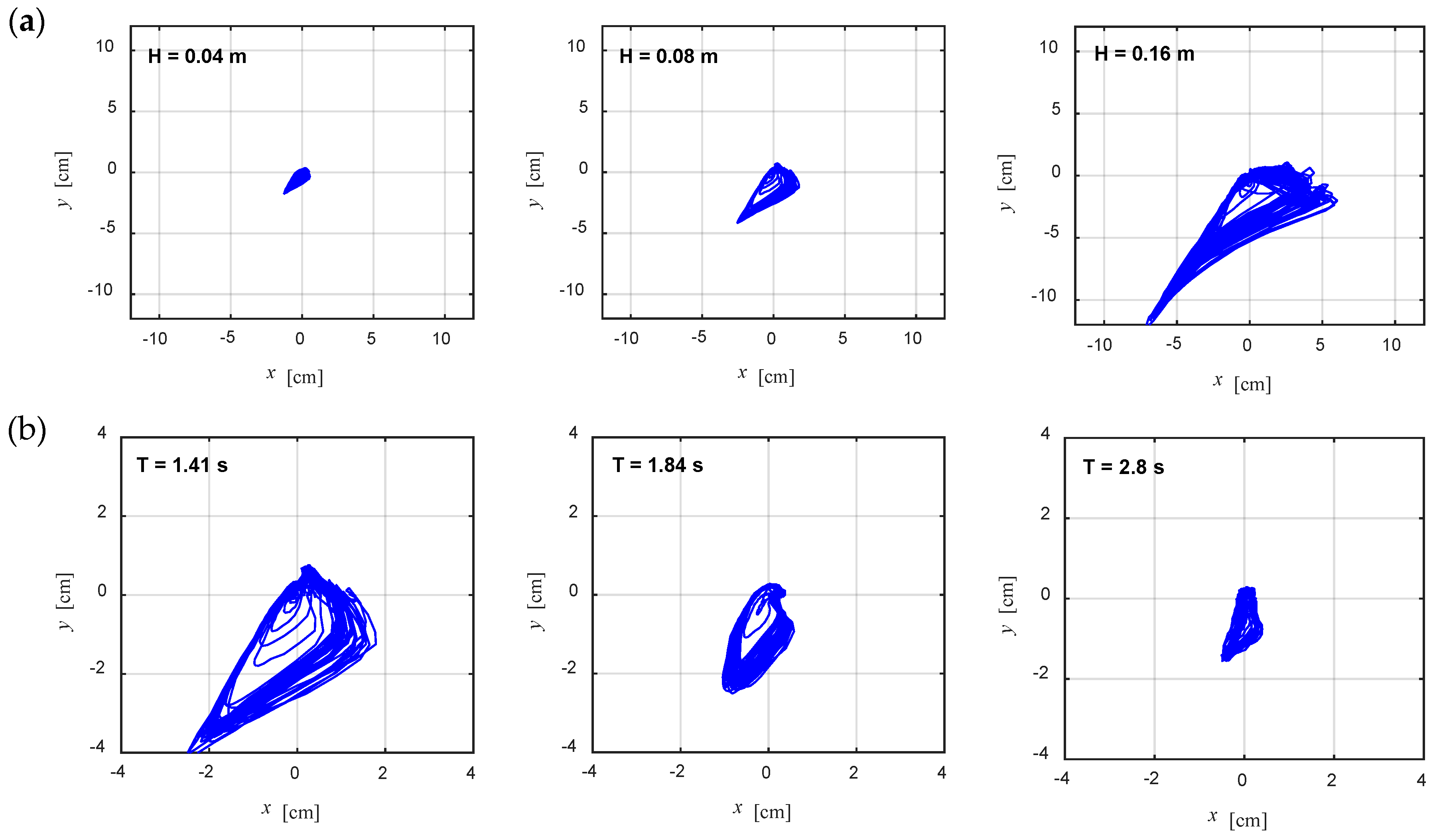
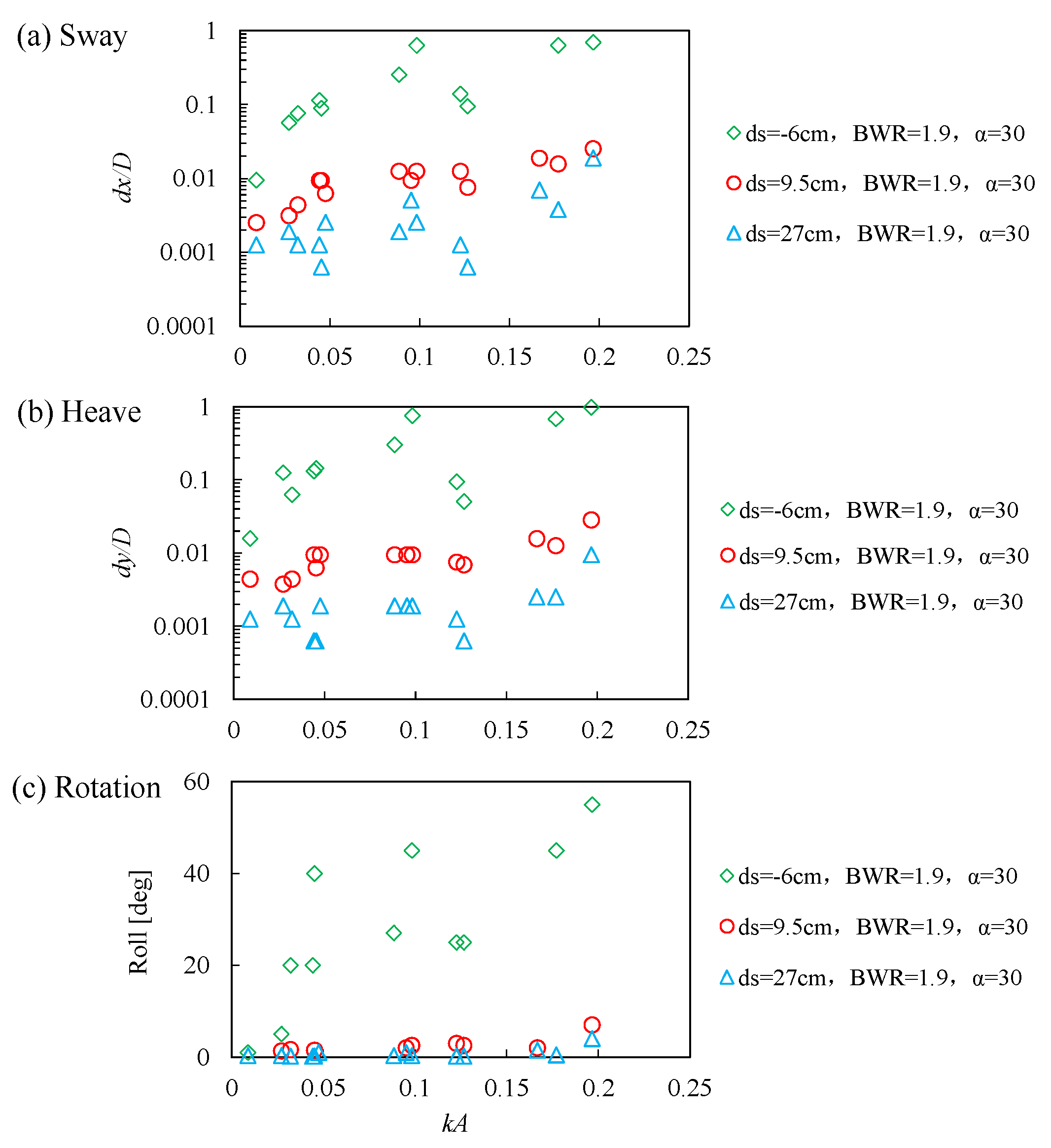
3.4.1. Wave Height
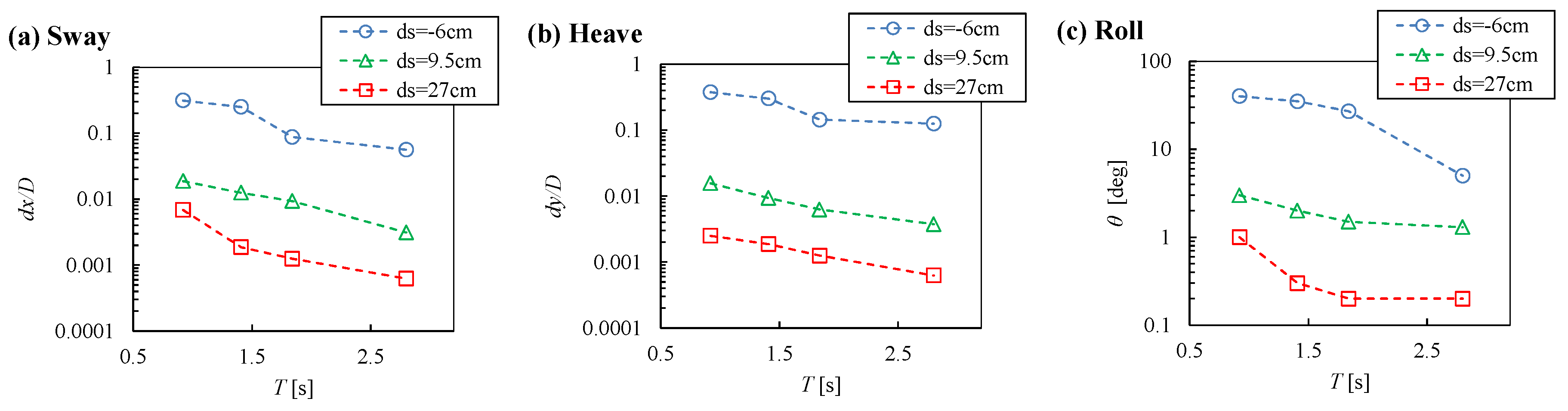
3.4.2. Wave Period
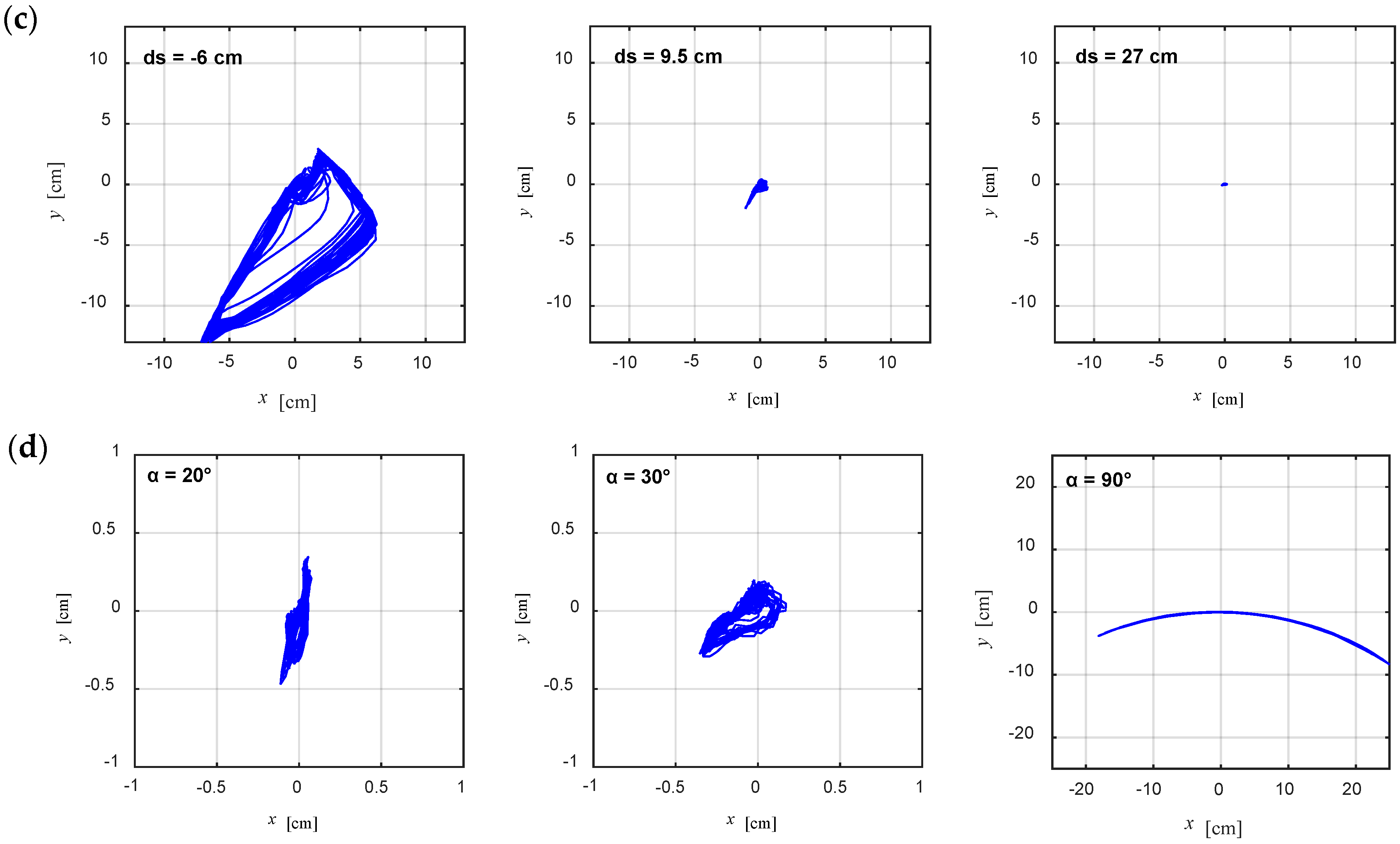
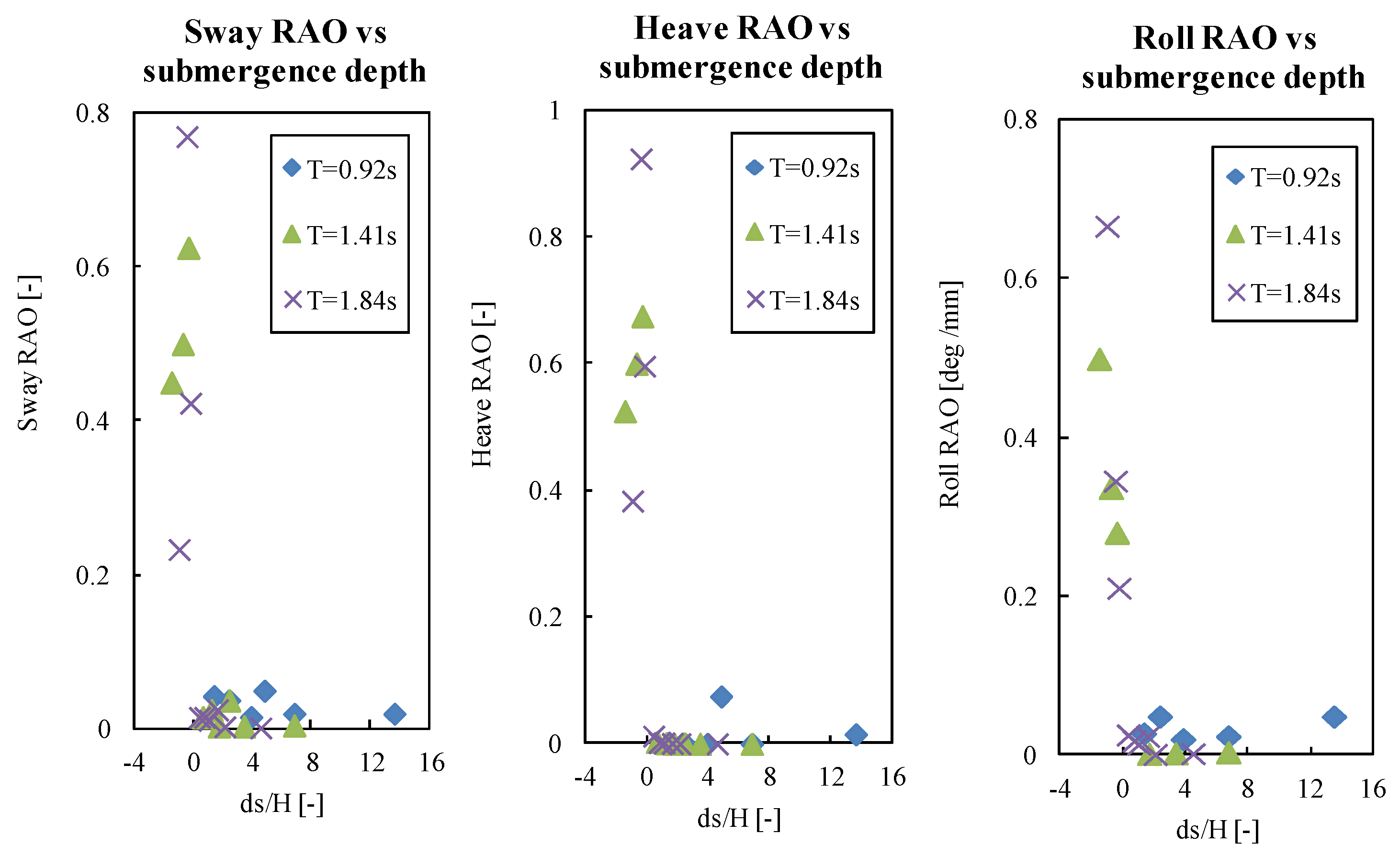
3.4.3. Submergence Depth
3.4.4. Buoyancy to Weight Ratio
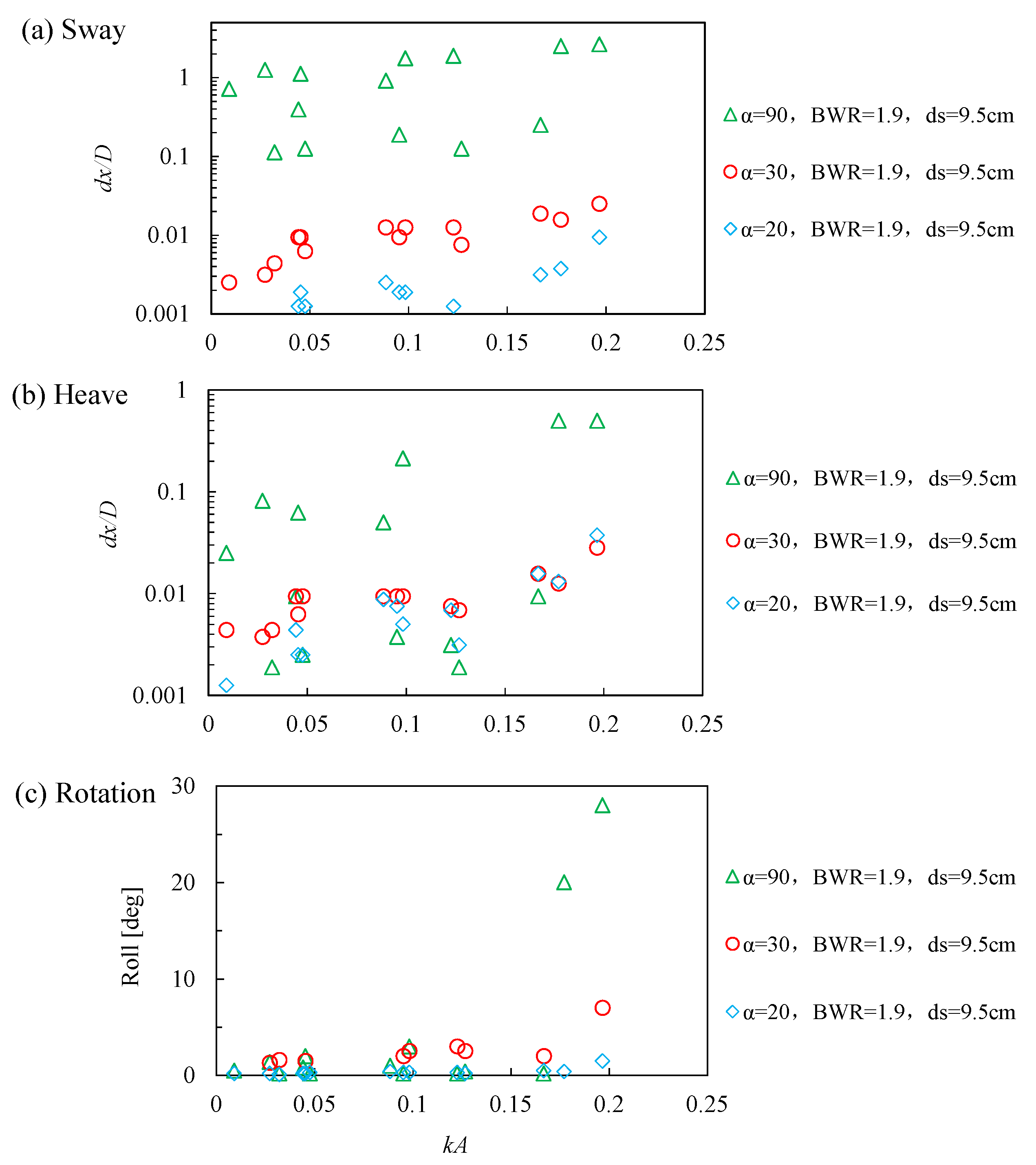
3.4.5. Mooring Line Angle
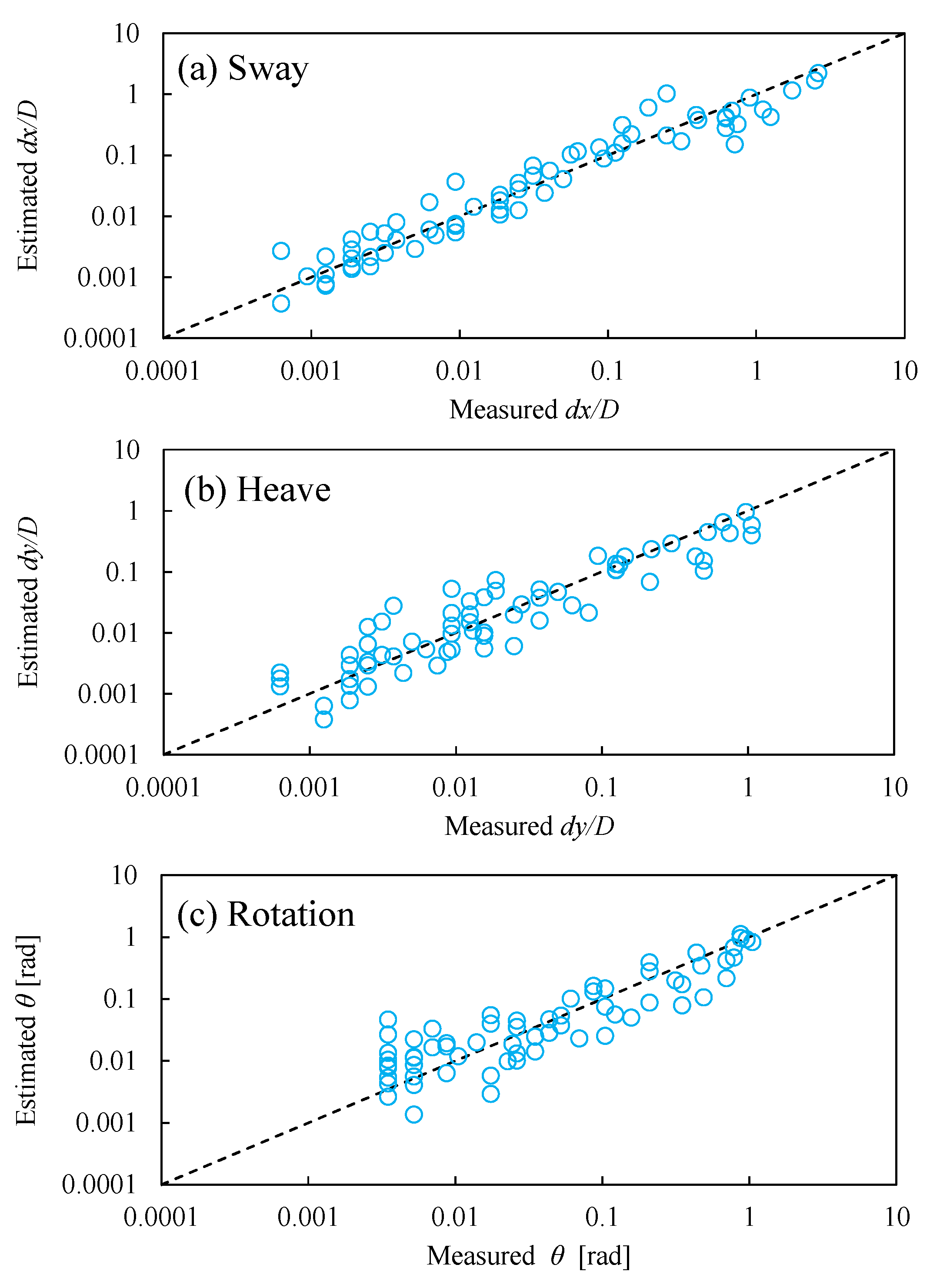
3.5. Empirical Equations to Estimate Motion Characteristics
4. Conclusions
- (1)
- The motion amplitudes of SFT increase with the increase of wave height because the large wave provides more energy and larger hydrodynamic force to drive the SFT moving
- (2)
- The effect of wave period T is related to the natural period T0 of the structure. The motion characteristics are significantly increased when T is close to T0 due to the resonance. With the wave period farther away from the natural period of the structure, the motion characteristics decrease.
- (3)
- The amplitudes of motion characteristics decrease significantly with submergence depth. For the submerged case of SFT located under the water surface, the sway, heave and roll is much smaller than that of SFT located on the water surface.
- (4)
- With the increase of BWR, the motion of SFT decreases. When the BWR is close to one, the SFT becomes very unstable, and this must be avoided in the design.
- (5)
- As the mooring line angle α increases, the amplitudes of motion characteristics generally increase, and the sway of the SFT becomes larger than the heave, because the mooring line mainly restricts the vertical movement while relaxing the horizontal movement.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mandara, A.; Russo, E.; Faggiano, B.; Federico, M. Analysis of fluid-structure interaction for a submerged floating tunnel. Procedia Eng. 2016, 166, 397–404. [Google Scholar] [CrossRef]
- Martire, G.; Faggiano, B.; Mazzolani, F.M. Compared cost evaluation among traditional versus innovative strait crossing solutions. Procedia Eng. 2010, 4, 293–301. [Google Scholar] [CrossRef]
- Seo, S.; Mun, H.; Lee, J.; Kim, J. Simplified analysis for estimationof the behavior of a submerged floating tunnel in waves and experimental verification. Mar. Struct. 2015, 44, 142–158. [Google Scholar] [CrossRef]
- Aalbers, S.Y.; Bosma, G.T.; Breedveld, R. Submerged Floating Tunnels—Structural Response. Bachelor’s Thesis, Delft University of Technology, Delft, The Netherland, 2018. [Google Scholar]
- Xiang, Y.; Yang, Y. Challenge in design and construction of submerged floating tunnel and state-of-art. Procedia Eng. 2016, 166, 53–60. [Google Scholar] [CrossRef]
- Tveit, P. Submerged Floating Tunnels (SFTs) for Norwegian fjords. Procedia Eng. 2010, 4, 135–148. [Google Scholar] [CrossRef]
- Engebretsen, K.B.; Jakobsen, K.K.; Haugerud, S.A.; Minoretti, A.A. Submerged floating tube bridge concept for the Bjørna fjord Crossing: Marine operations. In Proceedings of the ASME 2017 36th International Conference on Ocean, Offshore and Arctic Engineering, Trondheim, Norway, 25–30 June 2017; pp. 1–16. [Google Scholar]
- Kanie, S. Feasibility studies on various SFT in Japan and their technological evaluation. Procedia Eng. 2010, 4, 13–20. [Google Scholar] [CrossRef]
- Martinelli, L.; Barbella, G.; Feriani, A.A. Numerical procedure for simulating the multi-support seismic response of submerged floating tunnels anchored by cables. Eng. Struct. 2011, 33, 2850–2860. [Google Scholar] [CrossRef]
- Oh, S.H.; Park, W.S.; Jang, S.C. Physical experiments on the hydrodynamic response of submerged floating tunnel against the wave action. In Proceedings of the 7th International Conference on Asian and Pacific Coasts, Bali, Indonesia, 24–26 September 2013. [Google Scholar]
- Xiang, X.; Minoretti, A.; Eidem, M.E.; Belsvik, K.H.; Aasland, T.E.; Vodolazkin, M. Simplified hydrodynamic design procedure of a submerged floating tube bridge across the Digernessund of Norway. In Proceedings of the ASME 2017 36th International Conference on Ocean, Offshore and Arctic Engineering, Trondheim, Norway, 25–30 June 2017; pp. 1–11. [Google Scholar]
- Kunisu, H.; Mizuno, S.; Mizuno, Y.; Saeki, H. Study on submerged floating tunnel characteristics under the wave condition. In Proceedings of the Fourth International Offshore and Polar Engineering Conference, Osaka, Japan, 10–15 April 1994; International Society of Offshore and Polar Engineers: Osaka, Japan, 1994; pp. 27–32. [Google Scholar]
- Long, X.; Ge, F.; Wang, L.; Hong, Y. Effects of fundamental structure parameters on dynamic responses of submerged floating tunnel under hydrodynamic loads. Acta Mech. Sin. 2009, 25, 335–344. [Google Scholar] [CrossRef]
- Lu, W.; Ge, F.; Wang, L.; Wu, X.; Hong, Y. On the slack phenomena and snap force in tethers of submerged floating tunnels under wave conditions. Mar. Struct. 2011, 24, 358–376. [Google Scholar] [CrossRef]
- Hong, Y.; Ge, F.; Lu, W. On the two essential concepts for SFT: Synergetic buoyancy-weight ratio and slack-taut map. Procedia Eng. 2016, 166, 221–228. [Google Scholar] [CrossRef]
- Sundar, V.; Sundaravadivelu, R.; Kalyani, M. Forces due to oblique waves on a submerged open moored cylinder in deep waters. Ocean Eng. 2005, 32, 651–666. [Google Scholar] [CrossRef]
- Jin, C.; Kim, J.M.; Choi, J.; Park, W. Coupled dynamics simulation of submerged floating tunnel for various system parameters and wave conditions. In Proceedings of the ASME 2018 37th International Conference on Ocean, Offshore and Arctic Engineering, Madrid, Spain, 17–22 June 2018; pp. 1–6. [Google Scholar]
- Sun, C.; Wang, Q.; Yu, Q. Online Machine version method for measuring the diameter and straightness of seamless steel pipes. Optical Eng. 2001, 40, 2565–2571. [Google Scholar] [CrossRef]
- Wang, Q.; Zhang, Z.; Zang, Z. The trajectory prediction of spacecraft by grey method. Meas. Sci. Technol. 2016, 27, 085011. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test No. | Water Depth h [m] | Wave Height H [m] | Wave Period T [s] | kA [−] |
|---|---|---|---|---|
| 1 | 0.7 | 0.02 | 0.92 | 0.048 |
| 2 | 0.7 | 0.04 | 0.92 | 0.095 |
| 3 | 0.7 | 0.07 | 0.92 | 0.167 |
| 4 | 0.7 | 0.04 | 1.41 | 0.044 |
| 5 | 0.7 | 0.08 | 1.41 | 0.089 |
| 6 | 0.7 | 0.16 | 1.41 | 0.177 |
| 7 | 0.7 | 0.06 | 1.84 | 0.045 |
| 8 | 0.7 | 0.13 | 1.84 | 0.098 |
| 9 | 0.7 | 0.26 | 1.84 | 0.197 |
| 10 | 0.7 | 0.02 | 2.8 | 0.009 |
| 11 | 0.7 | 0.06 | 2.8 | 0.027 |
| BWR | Physical Quantities | Model | Prototype (×107) |
|---|---|---|---|
| Buoyancy [kg] | 19.835 | 1.016 | |
| 1.03 | Mass [kg] | 19.257 | 0.986 |
| 1.54 | 12.880 | 0.660 | |
| 1.90 | 10.439 | 0.535 | |
| 1.03 | Inertia moment [kg·m2] | 0.06162 | 20.19 |
| 1.54 | 0.04122 | 13.51 | |
| 1.90 | 0.03341 | 10.95 |
| Test No. | BWR | Natural Period T0 [s] | Natural Frequency ω0 [rad/s] |
|---|---|---|---|
| 1 | 1.03 | 1.79 | 3.51 |
| 2 | 1.54 | 0.96 | 6.54 |
| 3 | 1.90 | 0.66 | 9.13 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Li, J.; Zhang, H.; Yuan, C.; Yang, H. Experimental Study on 2D Motion Characteristics of Submerged Floating Tunnel in Waves. J. Mar. Sci. Eng. 2020, 8, 123. https://doi.org/10.3390/jmse8020123
Yang Z, Li J, Zhang H, Yuan C, Yang H. Experimental Study on 2D Motion Characteristics of Submerged Floating Tunnel in Waves. Journal of Marine Science and Engineering. 2020; 8(2):123. https://doi.org/10.3390/jmse8020123
Chicago/Turabian StyleYang, Zhiwen, Jinzhao Li, Huaqing Zhang, Chunguang Yuan, and Hua Yang. 2020. "Experimental Study on 2D Motion Characteristics of Submerged Floating Tunnel in Waves" Journal of Marine Science and Engineering 8, no. 2: 123. https://doi.org/10.3390/jmse8020123
APA StyleYang, Z., Li, J., Zhang, H., Yuan, C., & Yang, H. (2020). Experimental Study on 2D Motion Characteristics of Submerged Floating Tunnel in Waves. Journal of Marine Science and Engineering, 8(2), 123. https://doi.org/10.3390/jmse8020123