
Resonance Control Based on Hydrodynamic Analysis for Underwater Direct Drive Wave Energy Converter



Abstract
:1. Introduction
2. System Modeling
- When the buoy is running in heaving, the pressure difference between the upper and lower surfaces can be regarded as fixed because the distance between them is fixed. However, the AWS consists of a hollow cylinder and lib and the cylinder is filled with air and sealed by the lib. The lib is moving and cylinder is fixed, which causes the pressure difference between the upper and lower surfaces to change, when the wave comes.
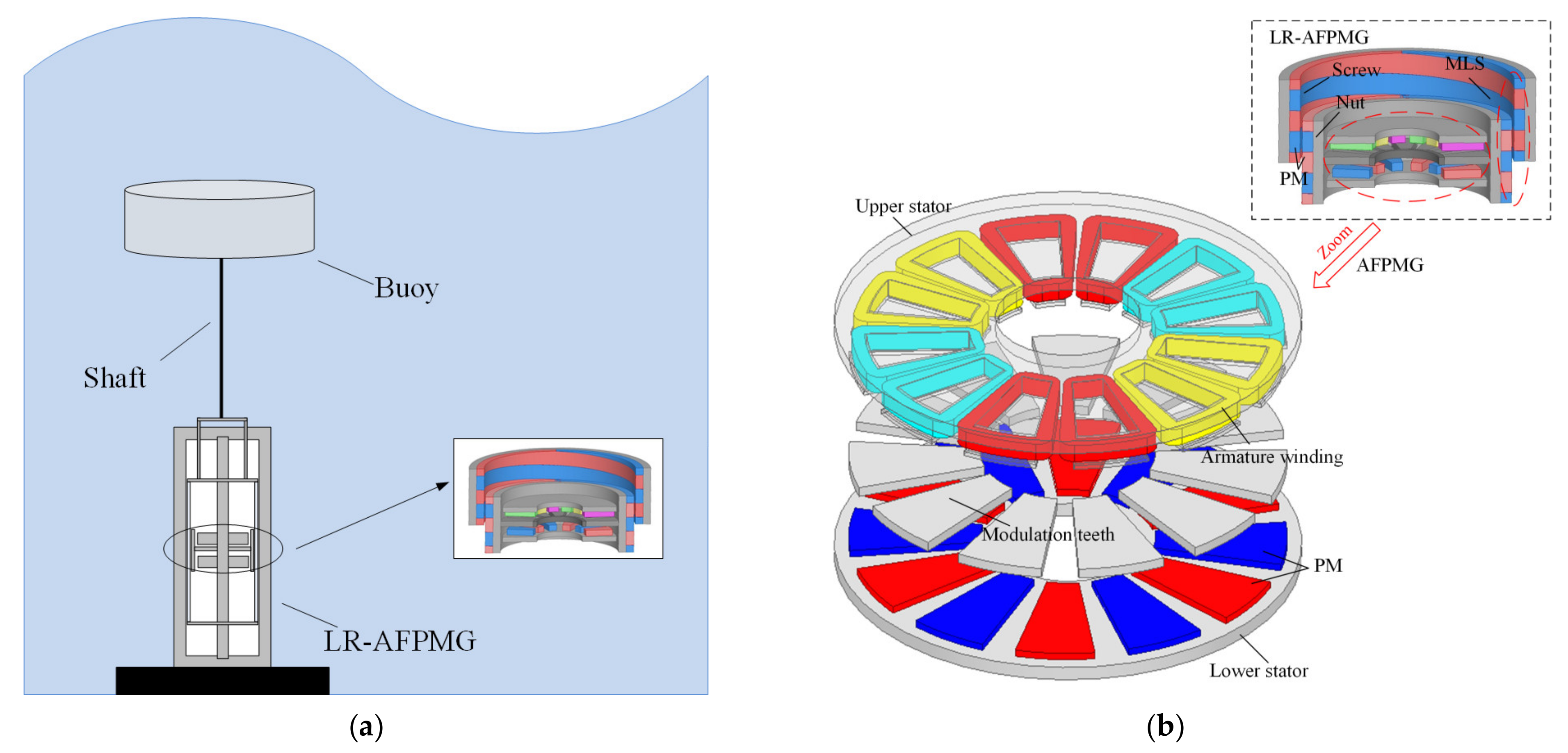
- In contrast with the AWS generator installed inside the cylinder, the generator proposed in this paper is installed under the buoy, and connected to the buoy by a shaft. Using this topology, the workload can be reduced when installing or maintaining the device. By using the LR-AFPMG composed of MLS and AFPMG, the generator and buoy are not directly connected, but a soft connection is realized through the MLS, which can further protect the power generation device from extreme ocean conditions and improve the reliability of the system.
- UWEC drives a pump fixed on the seabed through a cable to convert wave energy into hydraulic energy and send it to the shore for energy conversion. However, the proposed system directly realizes energy conversion by replacing the pump with LR-AFPMG. In this way, the power generation efficiency can be increased and the process loss can be reduced.
3. Force Analysis for Motion
- It is assumed that the fluid is an ideal incompressible fluid without rotation, and the motion amplitude of the buoy is small, so the linear potential theory can be used to analyze this problem.
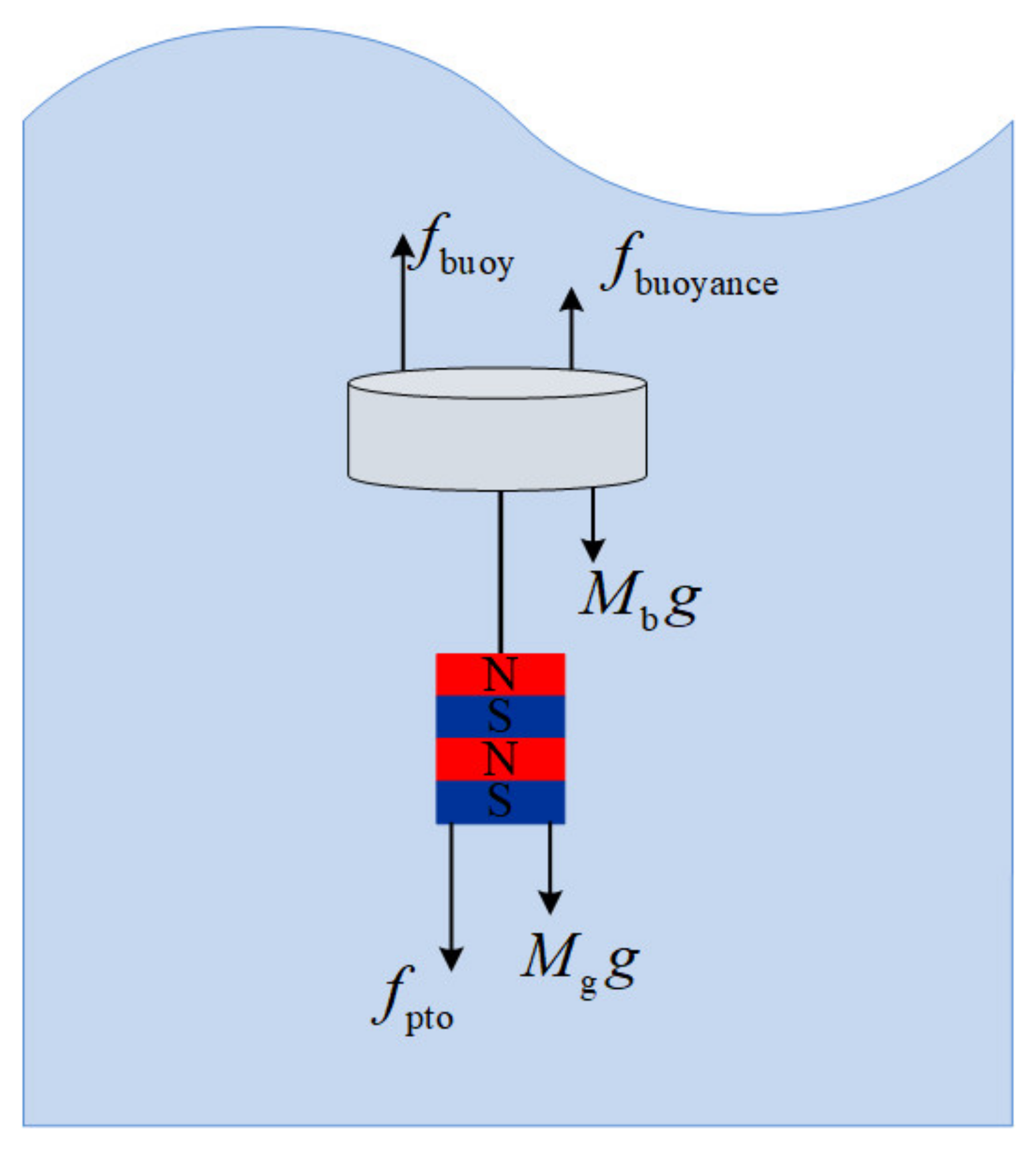
- Only the heaving motion of the buoy is considered in the force analysis. Generally, the oscillating buoy has six degrees of freedom motion, but considering that the generator is mainly driven by the heaving motion of the oscillating buoy.
- The shaft is installed between the buoy and generator, so the motion of them is synchronous.
- The viscous force and mooring force acting on the buoy have little effect on UDDWEC and thus can be ignored.
- Since the buoy of UDDWEC is under the sea surface, the device should be in an initial balanced state without external disturbance, so the buoyance force experienced by the oscillating buoy can just offset the total mass of the buoy and generator.
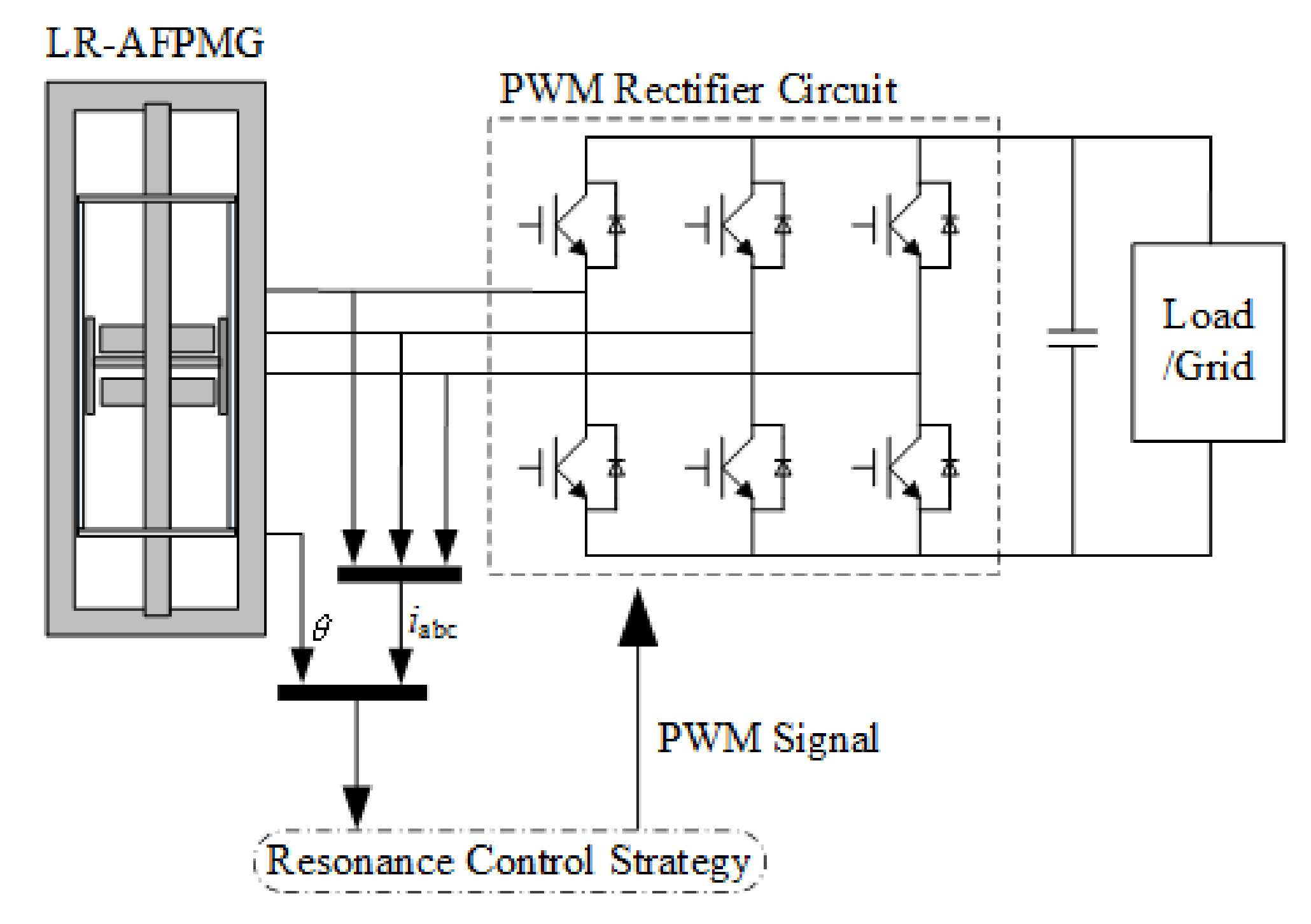
4. Control Strategy of Generator
5. Simulation Analysis of UDDWEC
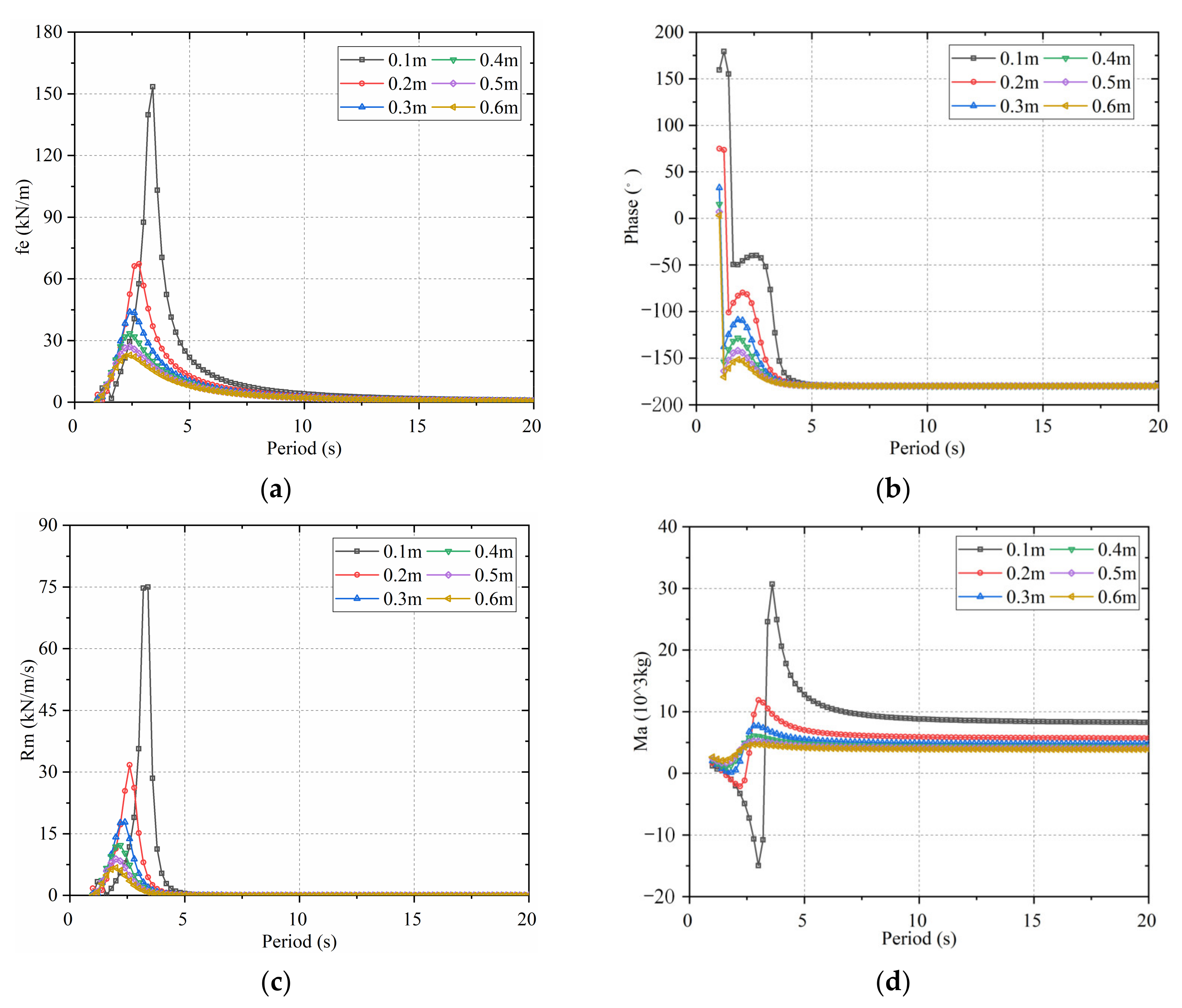
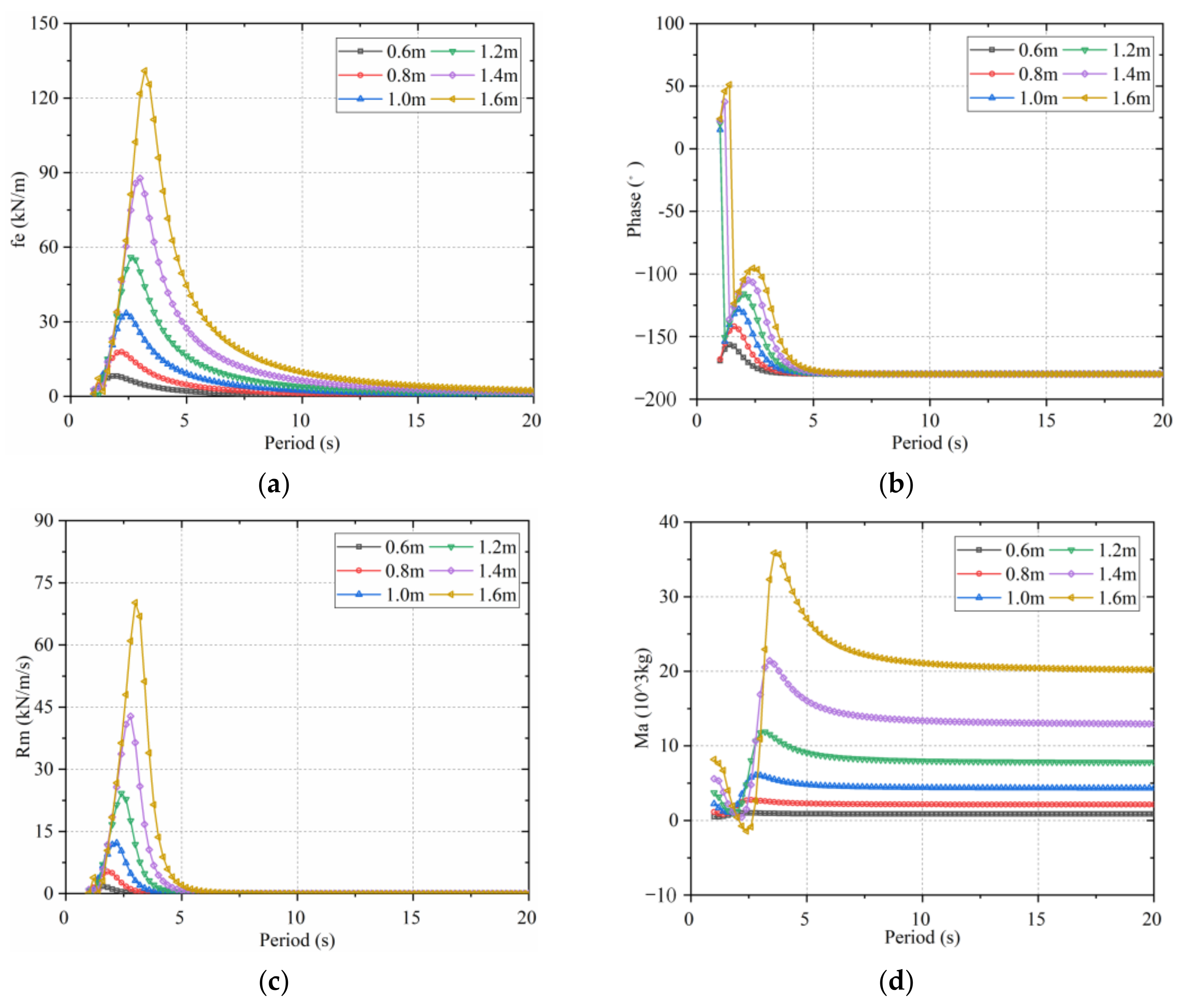
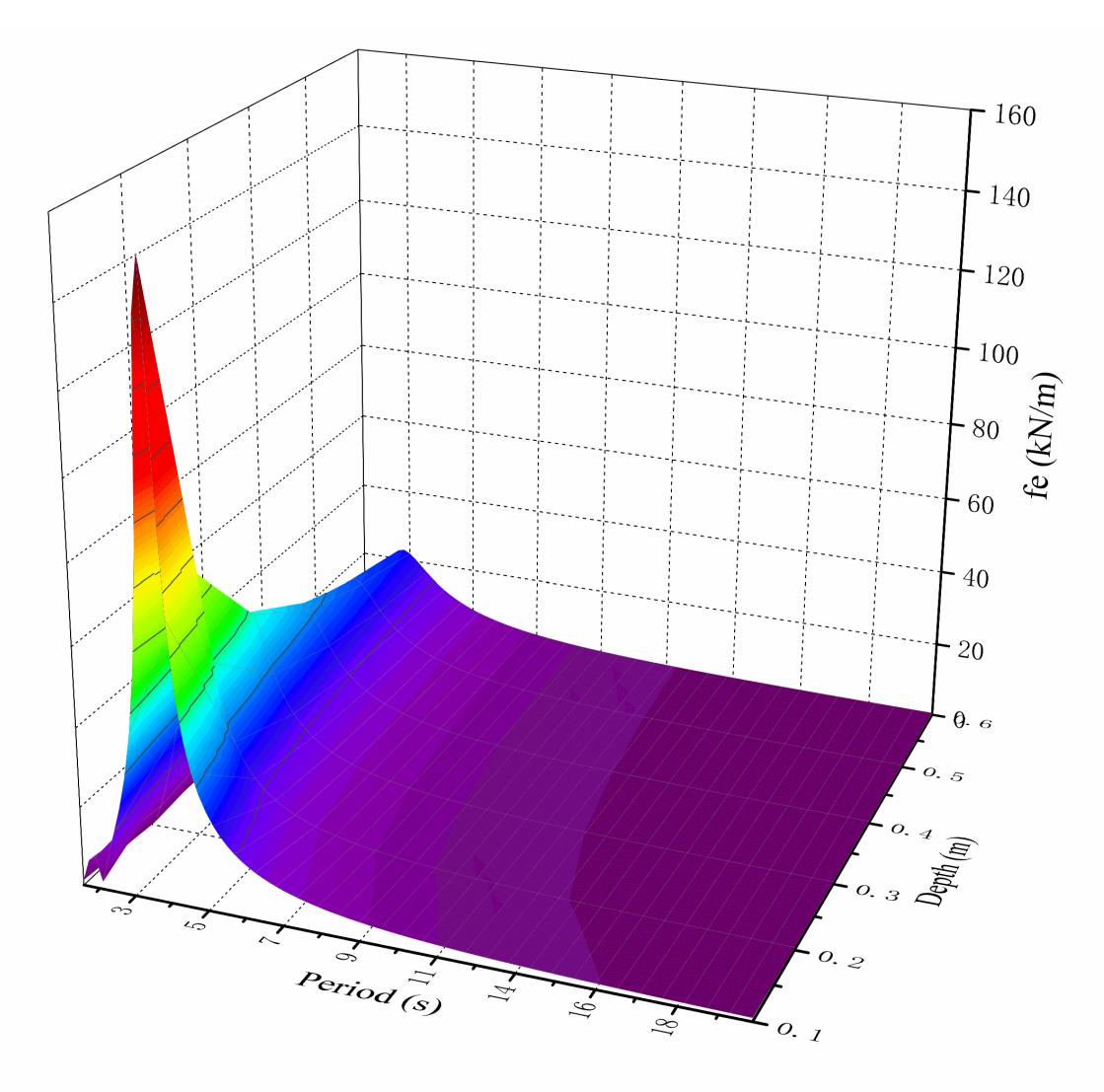
5.1. Hydrodynamic Analysis of the Buoy
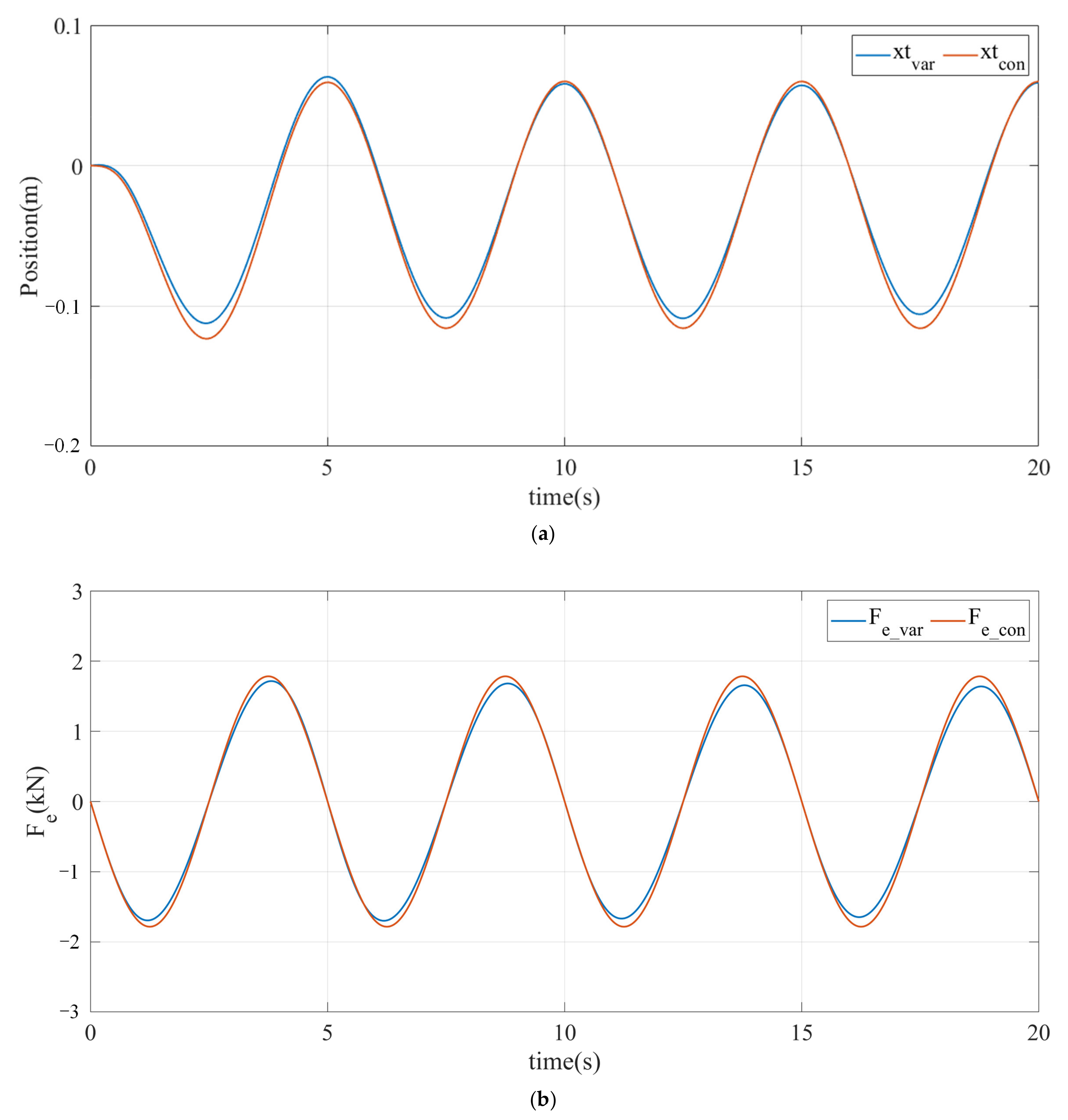
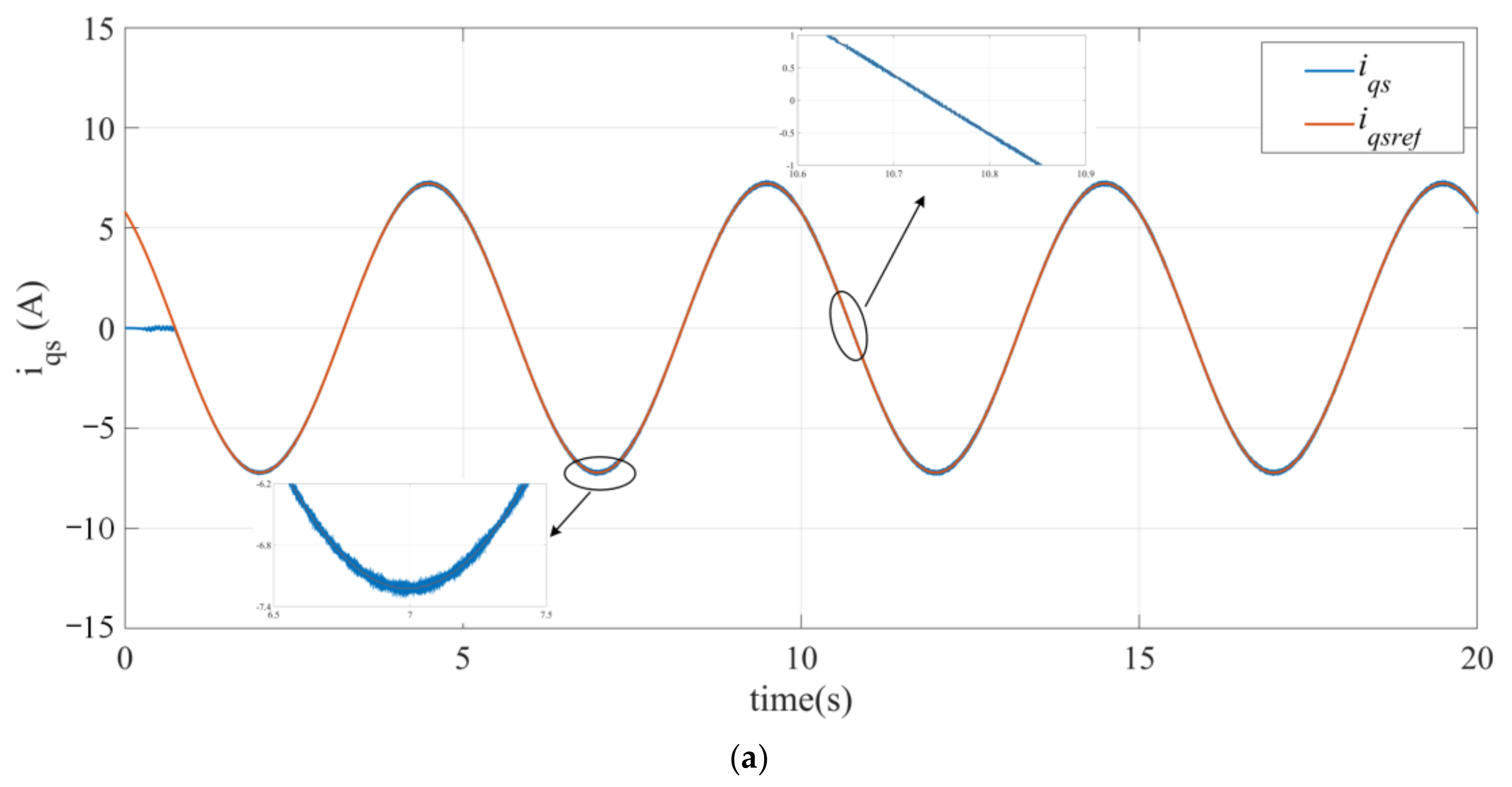
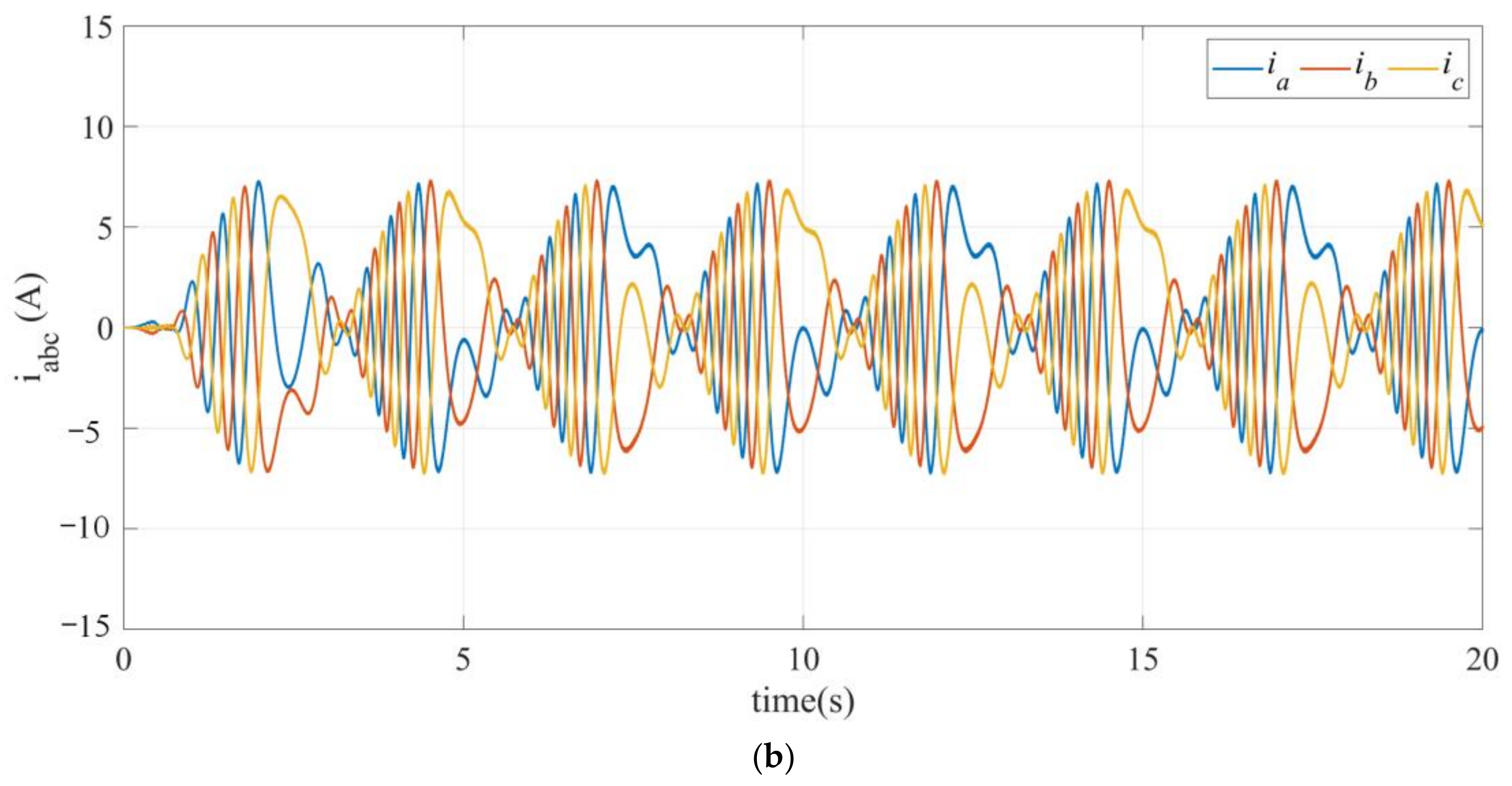
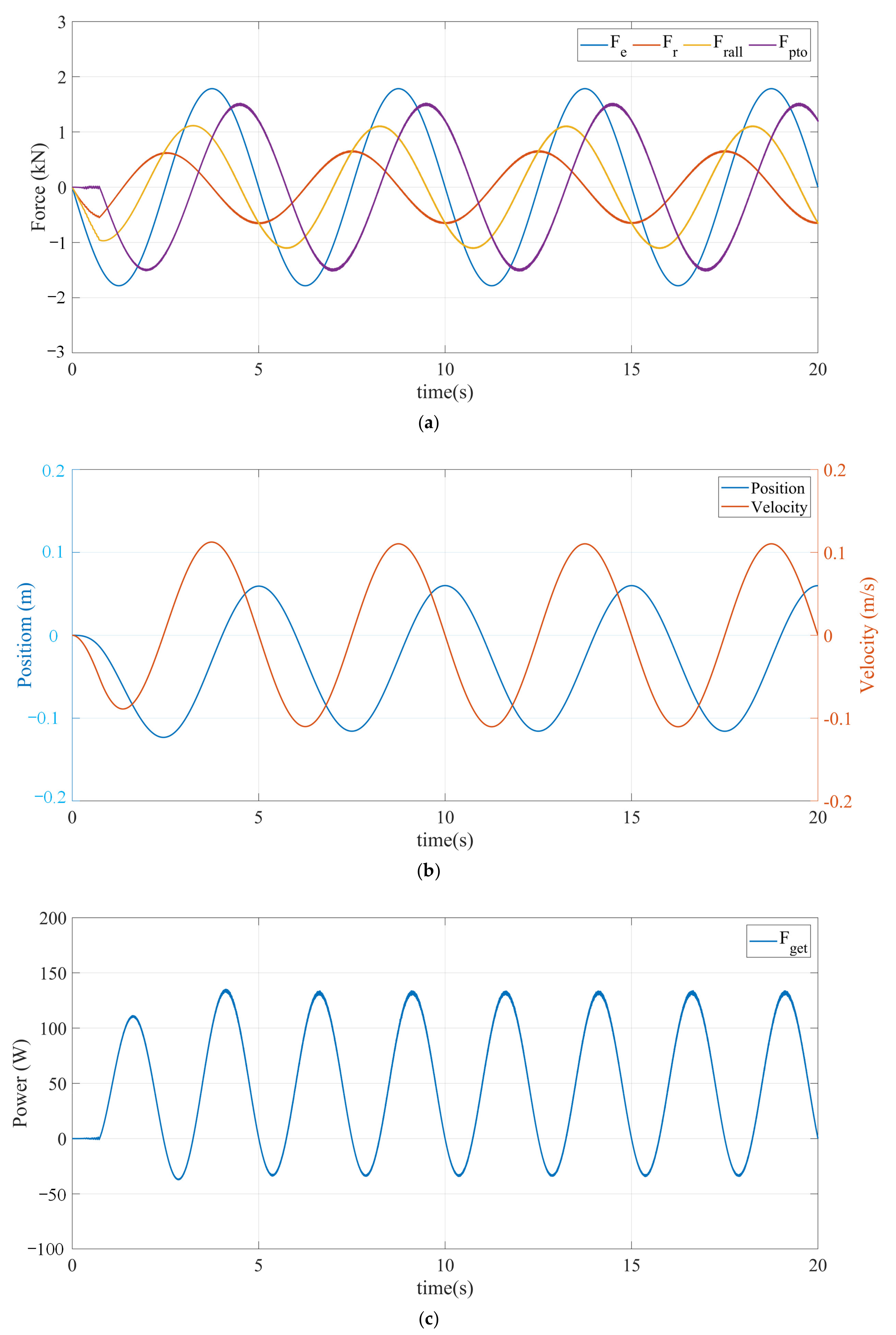
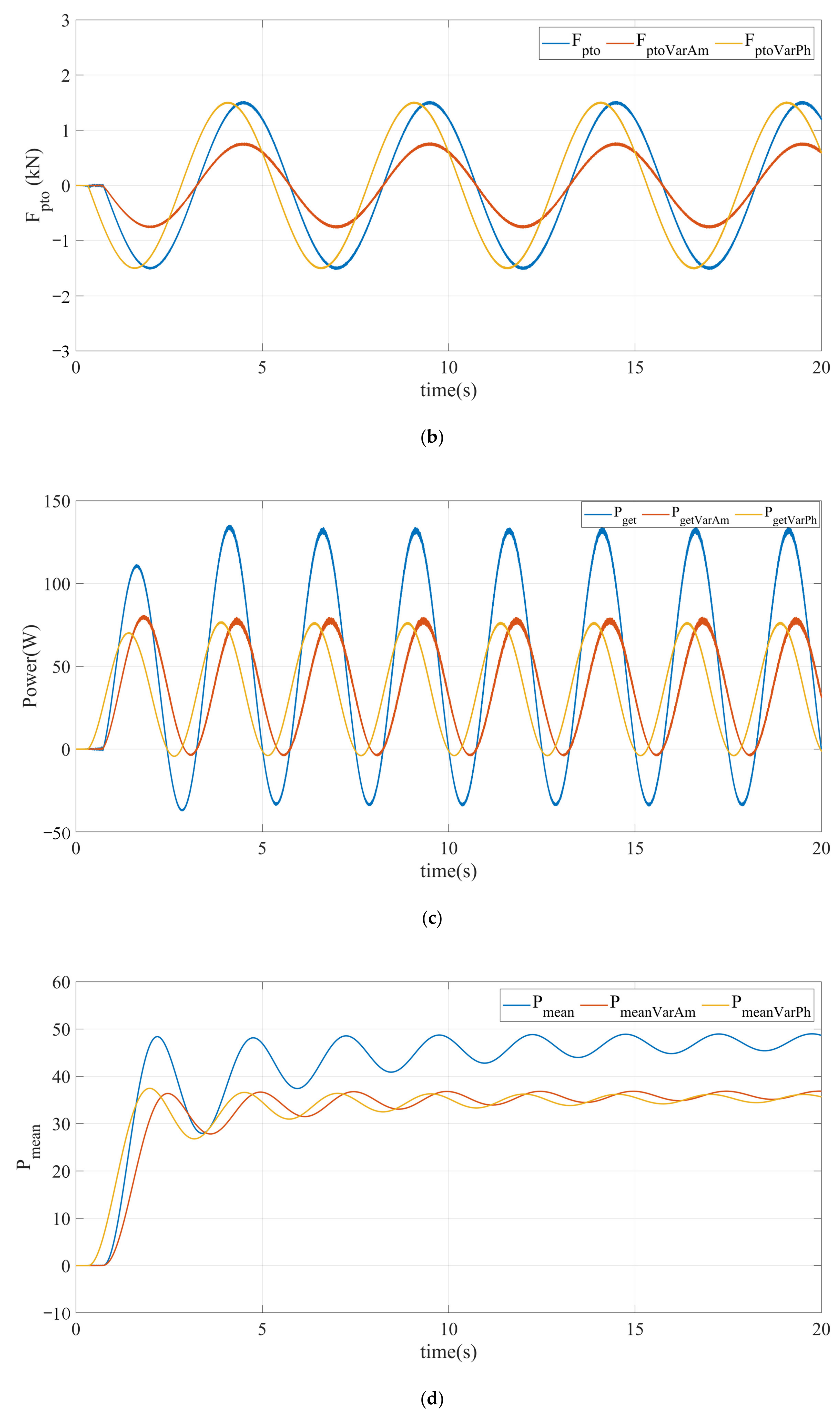
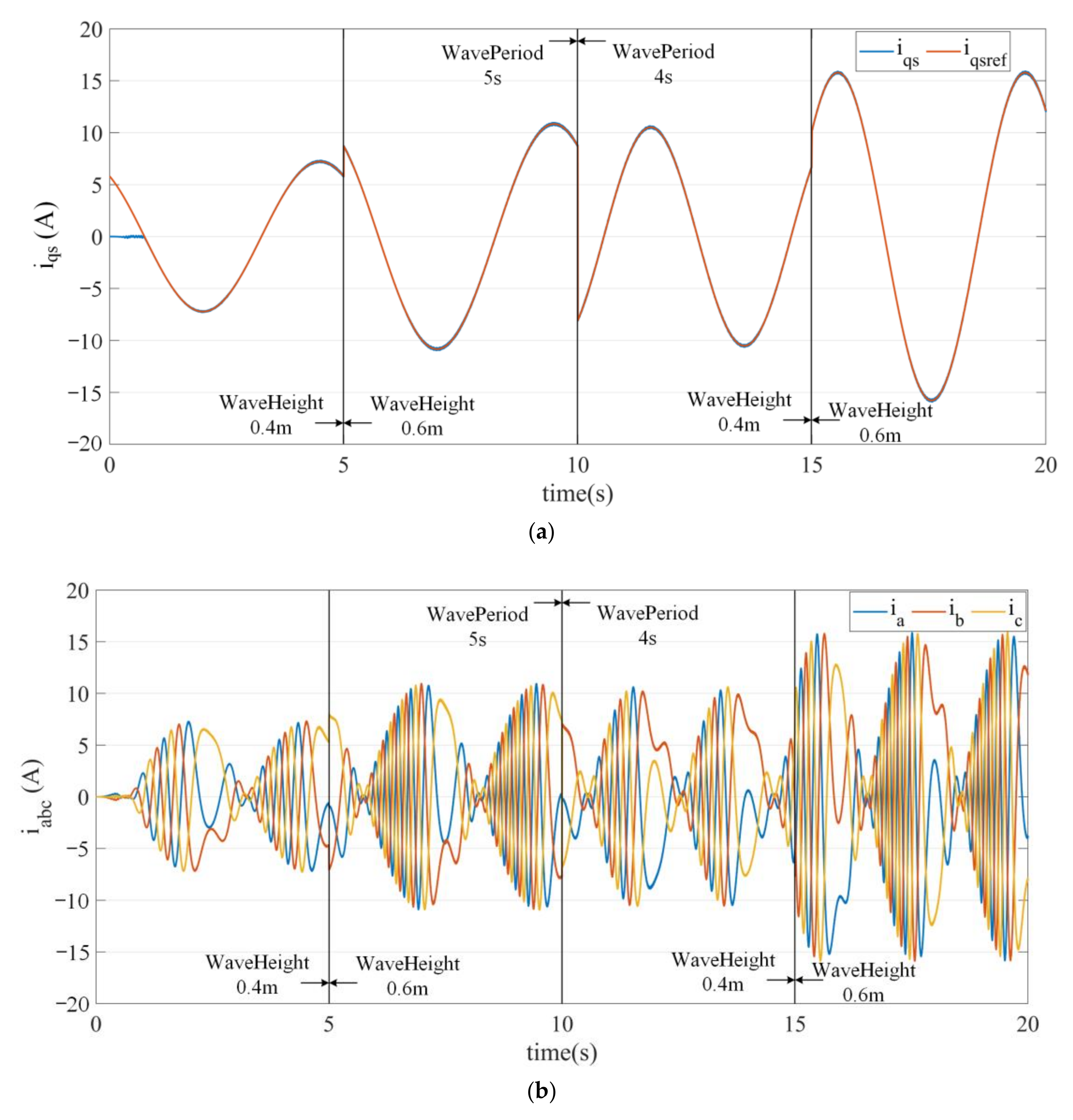
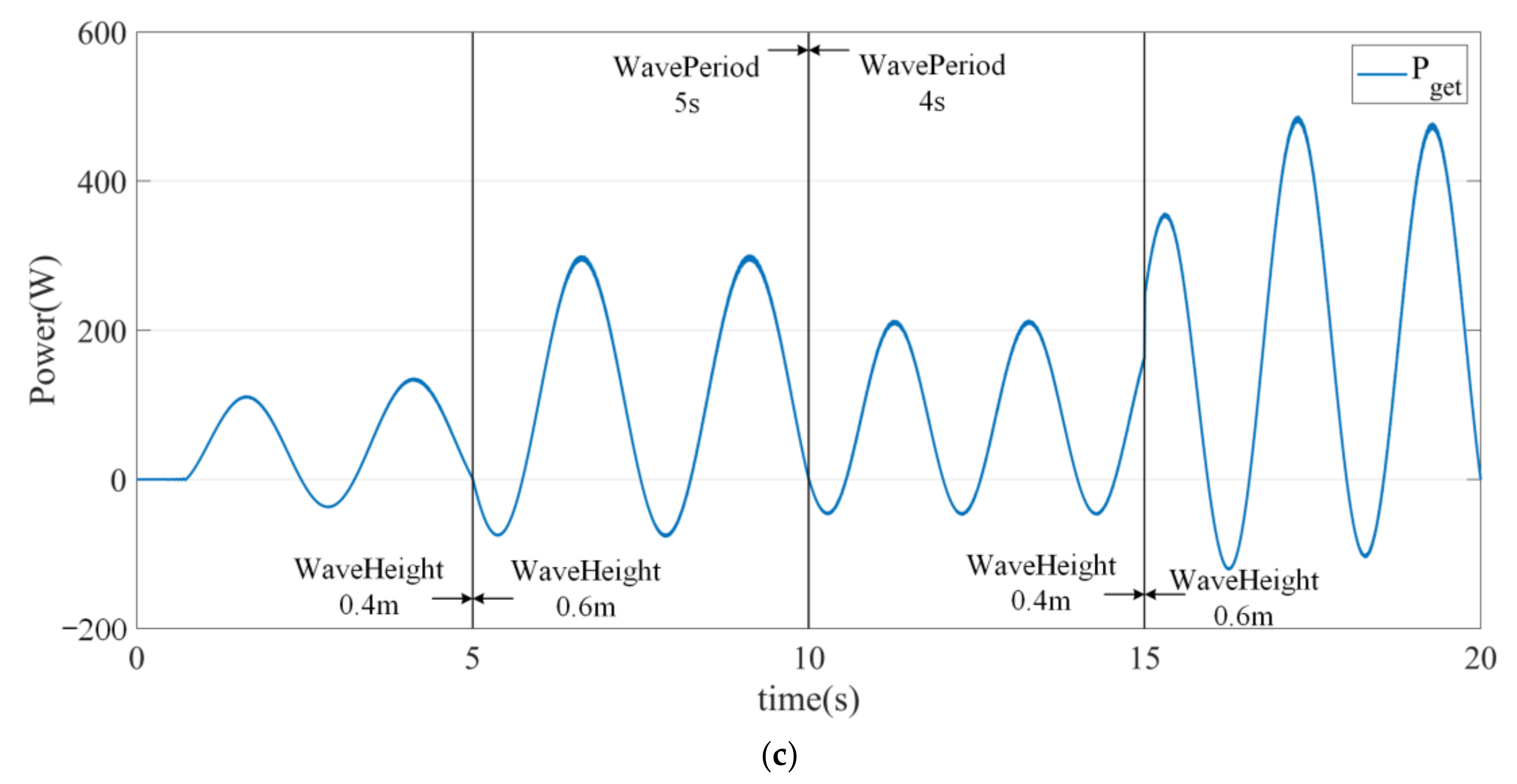
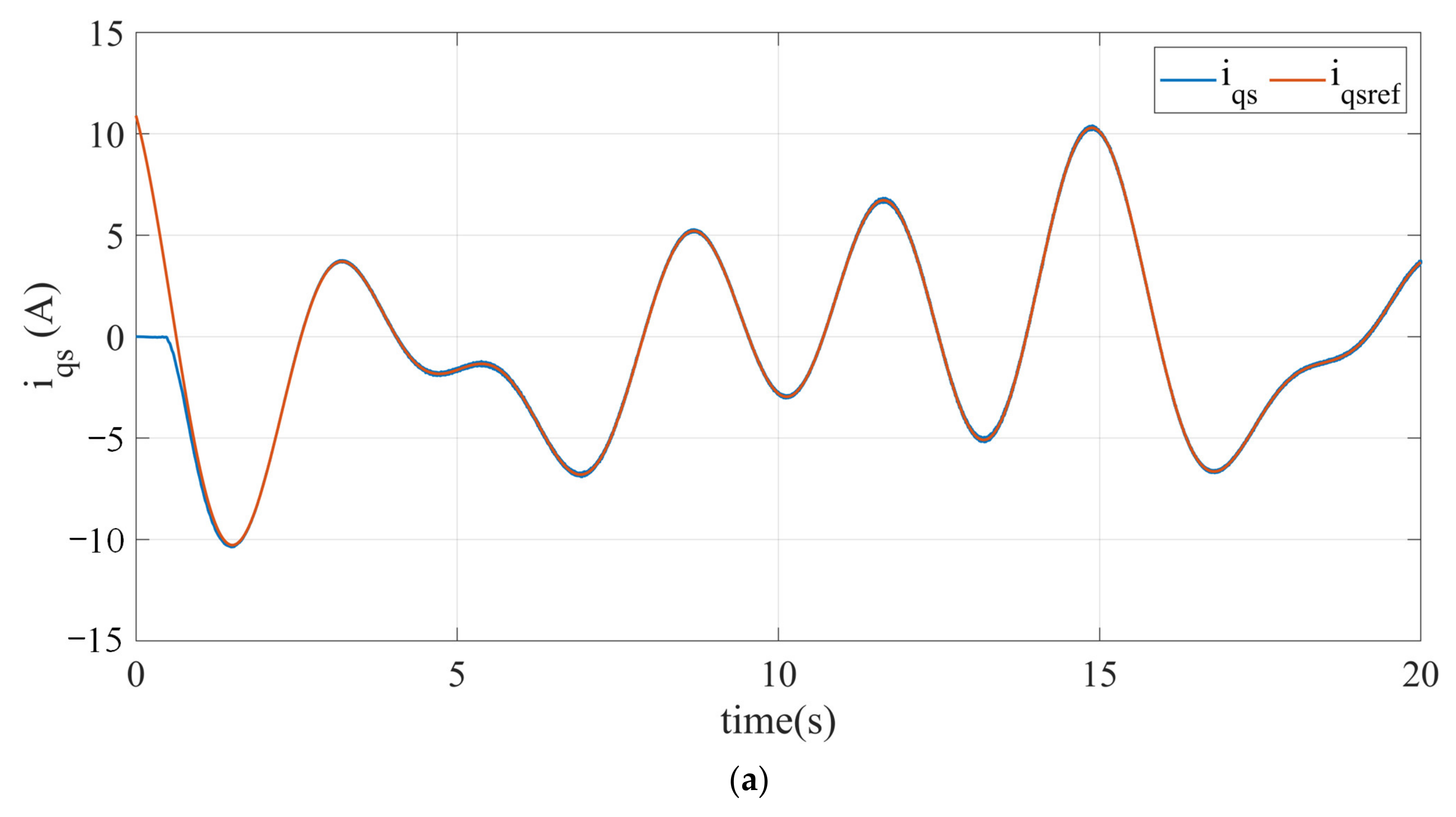
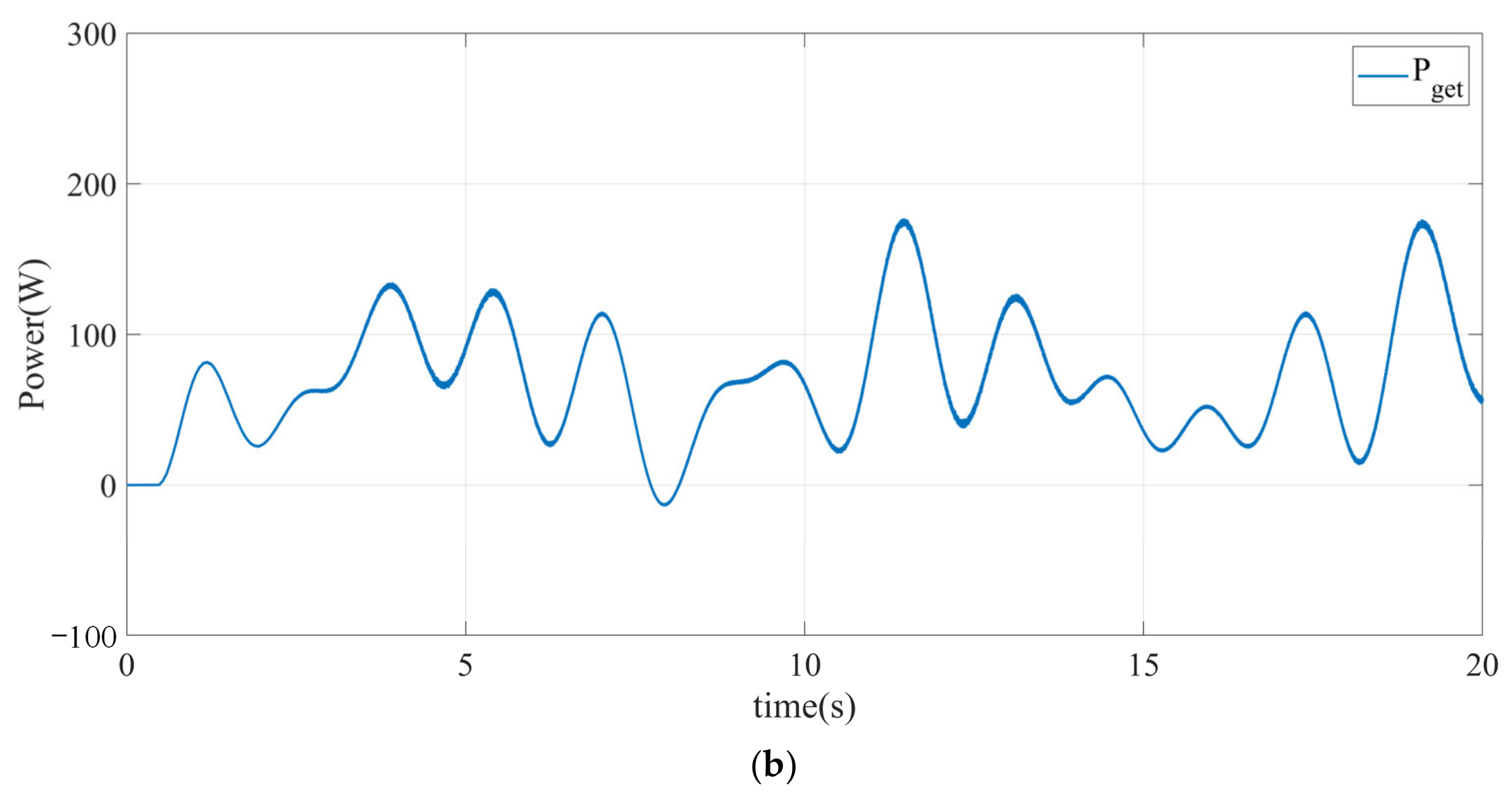
5.2. Resonance Control Simulation of UDDWEC
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Melikoglu, M. Current status and future of ocean energy sources: A global review. Ocean Eng. 2018, 148, 563–573. [Google Scholar] [CrossRef]
- Trueworthy, A.; DuPont, B. The Wave Energy Converter Design Process: Methods Applied in Industry and Shortcomings of Current Practices. J. Mar. Sci. Eng. 2020, 8, 932. [Google Scholar] [CrossRef]
- Polinder, H.; Damen, M.E.C.; Gardner, F. Linear PM generator system for wave energy conversion in the AWS. IEEE Trans. Energy Convers. 2004, 19, 583–589. [Google Scholar] [CrossRef] [Green Version]
- Rourke, F.O.; Boyle, F.; Reynolds, A. Marine current energy devices: Current status and possible future applications in Ireland. Renew. Sustain. Energy Rev. 2010, 14, 1026–1036. [Google Scholar] [CrossRef] [Green Version]
- Lehmann, M.; Karimpour, F.; Goudey, C.A.; Jacobson, P.T.; Alam, M.-R. Ocean wave energy in the United States: Current status and future perspectives. Renew. Sustain. Energy Rev. 2017, 74, 1300–1313. [Google Scholar] [CrossRef]
- Reikard, G.; Robertson, B.; Buckham, B.; Bidlot, J.-R.; Hiles, C. Simulating and forecasting ocean wave energy in western Canada. Ocean Eng. 2015, 103, 223–236. [Google Scholar] [CrossRef]
- Penalba, M.; Ringwood, J.V. A Review of Wave-to-Wire Models for Wave Energy Converters. Energies 2016, 9, 506. [Google Scholar] [CrossRef] [Green Version]
- Igic, P.; Zhou, Z.; Knapp, W.; MacEnri, J.; Sorensen, H.C.; Friis-Madsen, E. Multi-megawatt offshore wave energy converters—Electrical system configuration and generator control strategy. IET Renewable Power Gener. 2011, 5, 10–17. [Google Scholar] [CrossRef]
- Liu, Z.; Shi, H.; Cui, Y.; Kim, K. Experimental study on overtopping performance of a circular ramp wave energy converter. Renew. Energy 2017, 104, 163–176. [Google Scholar] [CrossRef]
- Medina Rodriguez, A.A.; Martinez Flores, A.; Blanco Ilzarbe, J.M.; Silva Casarin, R. Interaction of oblique waves with an Oscillating Water Column device. Ocean Eng. 2021, 228, 108931. [Google Scholar] [CrossRef]
- Cui, L.; Zheng, S.M.; Zhang, Y.L.; Miles, J.; Iglesias, G. Wave power extraction from a hybrid oscillating water column-oscillating buoy wave energy converter. Renew. Sustain. Energy Rev. 2021, 135, 110234. [Google Scholar] [CrossRef]
- Ricci, P.; Lopez, J.; Santos, M.; Ruiz-Minguela, P.; Villate, J.L.; Salcedo, F.; Falcao, A.F.D. Control strategies for a wave energy converter connected to a hydraulic power take-off. IET Renew. Power Gener. 2011, 5, 234–244. [Google Scholar] [CrossRef]
- Prasad, D.D.; Ahmed, M.R.; Lee, Y.H. Flow and performance characteristics of a direct drive turbine for wave power generation. Ocean Eng. 2014, 81, 39–49. [Google Scholar] [CrossRef] [Green Version]
- Hansen, R.H.; Andersen, T.O.; Pedersen, H.C.; Hansen, A.H. Control of a 420 kN discrete displacement cylinder drive for the wavestar wave energy converter. In Proceedings of the ASME/BATH 2014 Symposium on Fluid Power and Motion Control, Bath, UK, 10–12 September 2014. [Google Scholar]
- Sjolte, J.; Sandvik, C.M.; Tedeschi, E.; Molinas, M. Exploring the Potential for Increased Production from the Wave Energy Converter Lifesaver by Reactive Control. Energies 2013, 6, 3706–3733. [Google Scholar] [CrossRef] [Green Version]
- O’Sullivan, A.C.M.; Lightbody, G. Co-design of a wave energy converter using constrained predictive control. Renew. Energy 2017, 102, 142–156. [Google Scholar] [CrossRef]
- Liu, C.Y.; Yu, H.T.; Hu, M.Q.; Liu, Q.; Zhou, S.G.; Huang, L. Research on a permanent magnet tubular linear generator for direct drive wave energy conversion. IET Renew. Power Gener. 2014, 8, 281–288. [Google Scholar] [CrossRef]
- Penalba, M.; Ringwood, J.V. A high-fidelity wave-to-wire model for wave energy converters. Renew. Energy 2019, 134, 367–378. [Google Scholar] [CrossRef]
- Li, W.; Chau, K.T.; Jiang, J.Z. Application of Linear Magnetic Gears for Pseudo-Direct-Drive Oceanic Wave Energy Harvesting. IEEE Trans. Magn. 2011, 47, 2624–2627. [Google Scholar] [CrossRef]
- McGilton, B.; Crozier, R.; McDonald, A.; Mueller, M. Review of magnetic gear technologies and their applications in marine energy. IET Renew. Power Gener. 2018, 12, 174–181. [Google Scholar] [CrossRef]
- Ekstrom, R.; Ekergard, B.; Leijon, M. Electrical damping of linear generators for wave energy converters A-review. Renew. Sustain. Energy Rev. 2015, 42, 116–128. [Google Scholar] [CrossRef]
- Holm, R.K.; Berg, N.I.; Walkusch, M.; Rasmussen, P.O.; Hansen, R.H. Design of a Magnetic Lead Screw for Wave Energy Conversion. IEEE Trans. Ind. Appl. 2013, 49, 2699–2708. [Google Scholar] [CrossRef]
- Faiz, J.; Nematsaberi, A. Linear electrical generator topologies for direct-drive marine wave energy conversion—An overview. IET Renew. Power Gener. 2017, 11, 1163–1176. [Google Scholar] [CrossRef]
- Gao, F.; Wang, Q.; Hu, Y.; Chen, B.; Zhao, B.; Zou, J. Performance Evaluation of Magnetic Lead Screws Equipped With Skewed Arc Magnets Instead of Helical Ones. IEEE Trans. Magn. 2018, 54. [Google Scholar] [CrossRef]
- Nie, Z.X.; Xiao, X.; McMahon, R.; Clifton, P.; Wu, Y.X.; Shao, S.Y. Emulation and Control Methods for Direct Drive Linear Wave Energy Converters. IEEE Trans. Ind. Inf. 2013, 9, 790–798. [Google Scholar] [CrossRef]
- Amon, E.A.; Brekken, T.K.A.; Schacher, A.A. Maximum Power Point Tracking for Ocean Wave Energy Conversion. IEEE Trans. Ind. Appl. 2012, 48, 1079–1086. [Google Scholar] [CrossRef]
- Wu, F.; Ju, P.; Zhang, X.-P.; Qin, C.; Peng, G.J.; Huang, H.; Fang, J. Modeling, Control Strategy, and Power Conditioning for Direct-Drive Wave Energy Conversion to Operate With Power Grid. Proc. IEEE 2013, 101, 925–941. [Google Scholar] [CrossRef]
- Wang, L.; Isberg, J.; Tedeschi, E. Review of control strategies for wave energy conversion systems and their validation: The wave-to-wire approach. Renew. Sustain. Energy Rev. 2018, 81, 366–379. [Google Scholar] [CrossRef]
- Shek, J.K.H.; Macpherson, D.E.; Mueller, M.A. Phase and amplitude control of a linear generator for wave energy conversion. In Proceedings of the 2008 4th IET Conference on Power Electronics, Machines and Drives, York, UK, 2–4 April 2008; pp. 66–70. [Google Scholar] [CrossRef]
- Wu, F.; Zhang, X.P.; Ju, P.; Sterling, M.J.H. Optimal Control for AWS-Based Wave Energy Conversion System. IEEE Trans. Power Syst. 2009, 24, 1747–1755. [Google Scholar] [CrossRef]
- Windt, C.; Faedo, N.; Penalba, M.; Dias, F.; Ringwood, J.V. Reactive control of wave energy devices & ndash; the modelling paradox. Appl. Ocean Res. 2021, 109, 102574. [Google Scholar] [CrossRef]
- Li, G.; Belmont, M.R. Model predictive control of sea wave energy converters—Part I: A convex approach for the case of a single device. Renew. Energy 2014, 69, 453–463. [Google Scholar] [CrossRef]
- Zhan, S.; Na, J.; Li, G.; Wang, B. Adaptive Model Predictive Control of Wave Energy Converters. IEEE Trans. Sustain. Energy 2020, 11, 229–238. [Google Scholar] [CrossRef]
- Nicolás Faedo, S.O.; John, V. Ringwood. Optimal control, MPC and MPC-like algorithms for wave energy systems: An overview. IFAC J. Syst. Control 2017, 1, 37–56. [Google Scholar] [CrossRef] [Green Version]
- Bruzzone, L.; Fanghella, P.; Berselli, G. Reinforcement Learning control of an onshore oscillating arm Wave Energy Converter. Ocean Eng. 2020, 206. [Google Scholar] [CrossRef]
- Giorgi, G.; Ringwood, J.V. Nonlinear Froude-Krylov and viscous drag representations for wave energy converters in the computation/fidelity continuum. Ocean Eng. 2017, 141, 164–175. [Google Scholar] [CrossRef] [Green Version]
- Penalba, M.; Ringwood, J.V. Linearisation-based nonlinearity measures for wave-to-wire models in wave energy. Ocean Eng. 2019, 171, 496–504. [Google Scholar] [CrossRef]
- Guo, B.; Patton, R.; Jin, S.; Gilbert, J.; Parsons, D. Nonlinear Modeling and Verification of a Heaving Point Absorber for Wave Energy Conversion. IEEE Trans. Sustain. Energy 2018, 9, 453–461. [Google Scholar] [CrossRef]
- Ding, B.Y.; Cazzolato, B.S.; Arjomandi, M.; Hardy, P.; Mills, B. Sea-state based maximum power point tracking damping control of a fully submerged oscillating buoy. Ocean Eng. 2016, 126, 299–312. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Unit | Value | Symbol | Parameter | Unit | Value |
|---|---|---|---|---|---|---|---|
| Number of pole pair | - | 11 | Load capacitance | F | 3 × 10−3 | ||
| Phase resistance | 5 × 10−2 | Proportional coefficient of | - | 2 × 104 | |||
| and | Inductance of axes | H | 3.1 × 10−2 | Integration coefficient of | - | 1 × 10−2 | |
| Permanent flux linkage | Wb | 8 × 10−2 | Proportional coefficient of | - | 6 × 103 | ||
| Pole pitch | m | 2 × 10−2 | Integration coefficient of | - | 1 | ||
| Filter inductance | H | 7 × 10−3 | Mass of translator | kg | 1 × 103 | ||
| Load resistance | 2 × 102 | Mass of buoy | kg | 570 | |||
| Load inductance | H | 6 × 10−3 | Volume of buoy | m3 | 1.57 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Huang, L.; Tan, P.; Chen, M.; Chen, J. Resonance Control Based on Hydrodynamic Analysis for Underwater Direct Drive Wave Energy Converter. J. Mar. Sci. Eng. 2021, 9, 1192. https://doi.org/10.3390/jmse9111192
Li Y, Huang L, Tan P, Chen M, Chen J. Resonance Control Based on Hydrodynamic Analysis for Underwater Direct Drive Wave Energy Converter. Journal of Marine Science and Engineering. 2021; 9(11):1192. https://doi.org/10.3390/jmse9111192
Chicago/Turabian StyleLi, Yang, Lei Huang, Peiwen Tan, Minshuo Chen, and Junquan Chen. 2021. "Resonance Control Based on Hydrodynamic Analysis for Underwater Direct Drive Wave Energy Converter" Journal of Marine Science and Engineering 9, no. 11: 1192. https://doi.org/10.3390/jmse9111192
APA StyleLi, Y., Huang, L., Tan, P., Chen, M., & Chen, J. (2021). Resonance Control Based on Hydrodynamic Analysis for Underwater Direct Drive Wave Energy Converter. Journal of Marine Science and Engineering, 9(11), 1192. https://doi.org/10.3390/jmse9111192