1. Introduction
Ocean currents flow over long distances and, together, form a global conveyor belt, which plays a leading role in determining the climate of many regions on the earth. Ocean current is one of the potential energy sources to be developed. The Kuroshio strong current flowing through the east of Taiwan is an excellent energy resource. The potential electricity capacity that Taiwan can harvest from it is estimated at about 4 GW [
1]. However, the seabed beneath the Kuroshio current flowing through the east of Taiwan is almost over 1000 m. Thus, deep mooring technology must be developed to overcome the condition. For the stability and performance of the ocean turbine, the investigation of dynamic stability of the mooring system under the coupled effect of the ocean current and wave is important.
In addition, it is predictable that a few typhoons will strike Taiwan every year. Hence, technology that is able to avoid damage to the mooring system due to typhoon impact is very important. Lin and Chen [
2] proposed the design of a mooring system that allows the floating platform to stably dive deep enough to prevent damage induced by typhoon waves. The design principle of the mechanism is that the submarined floating platform with negative buoyancy is connected to a pontoon with positive buoyancy. The diving depth of the floating platform is determined by the rope length. If the static equilibrium of the two forces is satisfied, the diving depth will be kept. If the diving depth of the floating platform is enough, the platform will not be directly damaged by wave impact. In reality, however, the system will be greatly subjected to the typhoon wave and the ocean current. The stability of the system and the dynamic tension of the rope must be significantly considered. The Kuroshio strong current flowing from south to north through the east of Taiwan has a flow velocity of about 0.7~2 m/s. Because the seabed is over 1000 m deep, a long mooring rope is required. For the construction of rope, the light-weight high-strength PE mooring rope is more beneficial than chain and steel ropes are. Lin and Chen [
2] found that a certain amount of ocean current drag force will make the force deformation of the PE rope negligable and can cause the rope to assume a straight line. Therefore, the rope is only subject to expansion and contraction. It is found that the rope length is about 2900 m, the drag force is 15 tons, and the ocean current velocity is 1 m/s, and it is almost straight. The tension of the rope can be regarded as uniform and linear elastic behavior. Furthermore, the anchorage system is simulated in the linear elastic mode to analyze its dynamic stability problem.
Chen et al. [
1] successfully moored the 50-kW ocean current turbine, developed by the Wanchi company, to the 850 m deep seabed near the offshore of Pingtung County, Taiwan. At the current speed of 1.0 m/s, the output power of the system is 26 kW. Lin et al. [
3] investigated the dynamic stability of the ocean current turbine system developed by the Wanchi company. The system is composed of turbine, buoyance platform, traction rope, and mooring foundation. The floating system was tethered to the seafloor and used the Kuroshio current to produce electricity. The effects of current velocity and wave to the pitch motion and the dynamical stability of the ocean current turbine system were investigated. It was found that the effects of several parameters of the system on the resonance are significant. Lin and Chen [
2] proposed a good safety design, which can protect the floating platform and ropes from damage when typhoon waves hit the floating platform. In the design, the linear elastic model is used to construct the coupled motion equation of the system. The analytical solutions of the coupled equations are derived. The influence of several parameters on system stability and rope tension is studied, and the best design parameters are proposed. IHI and NEDO [
4] conducted a demonstration experiment of the 100 kW-class ocean current turbine located off the coast of Kuchinoshima Island, Kagoshima Prefecture. During the experiment, the Kuroshio had a flow speed of approximately 1.0 m/s, and about 30 kW of electric power was generated from that ocean current. The turbine system 50 m below sea surface was moored from the anchor installed on the seabed at around 100 m. Zwieten et al. [
5] simulated the C-Plane ocean current turbine as a rigid body that was tethered to the sea floor. The simulation demonstrated that the C-Plane was stable and capable of changing depth in different operating conditions. It is well known that, when diving too deep, the water pressure is too large and the turbine is damaged.
The technology of flexible mooring systems is important for deep-water anchoring and is suitable and can be applied to ocean current energy converters (OCEC). Also, it is often used in wave energy converters (WEC) and tidal current energy converters (TCEC). The differences between the wave energy converter (WEC) mooring system and ocean current energy converter (OCEC) mooring systems are: (1) the depth of seabed for WEC is almost under 30 m. However, the depth of the seabed in the east of Taiwan, for current power generation, is over 800 m. (2) Wave energy converters (WEC) are often set up near offshore where there is no ocean current. The WEC can easily float in any direction. However, the orientation of the ocean current turbine subjected to the current drag force is in the direction of the ocean current. To fix the mooring system of WEC, chains are often used to secure the wave energy converter. The deformation of a mooring chain for WEC is curved so that the tension of the chain will change along the mooring line. Therefore, it this is a non-linear behaviors. Due to this fact, the governing equation with the variation in tension is a nonlinear partial differential equation. The nonlinear equation is very difficult to solve directly. In general, numerical methods such as the finite element method [
6], the finite difference method [
7], the lumped mass method [
8], Ansys AQWA software [
9], and others [
8,
10,
11,
12,
13,
14] are used to conduct analysis of the dynamic behaviors of the mooring chain.
Paduano et al. [
8] investigated the dynamic stability of a floating oscillating water column WEC with three mooring lines under an incident wave. The spectrums of Spar-bouy OWC motion for regular and irregular incident waves are determined. Touzon et al. [
13] investigated the dynamic stability of a floating WEC with four mooring lines under an incident wave by using several numerical methods. The spectrums of surge, heaven, and pitch motions of a floating WEC are determined. The study of dynamic stability is also considered by other fields: (1) stability of structure [
15,
16]; (2) stability of mechanical device [
17,
18,
19,
20,
21].
This research proposes a mooring design that keeps the turbine ocean current in a static balance and is fixed at a predetermined depth underwater to ensure that the ocean current generator can effectively use the ocean current to generate electricity, and that the water pressure is maintained at a sufficient value before the critical pressure is damaged. This study uses a linear elastic model to simulate the motion equation of the entire mooring system. A theoretical solution for the analysis of the static and dynamic stability of the mooring system is proposed. The dynamic behavior of the tension of turbines, floating platforms, pontoons, and ropes under the action of waves and ocean currents is studied. The effects of various parameters on the dynamic behavior of the system are studied.
4. Numerical Results
According to the investigation report from 2009 to 2020 in the Central Meteorological Bureau Library of Taiwan, the maximum offshore sea significant wave height of Taiwan’s Orchid Island is about 7.66 m in January. The average significant wave height in December is 2.80 m, which is the annual maximum. The average period of waves is about 5.4~6.7 s [
22]. According to this information, the wave height and wave frequency are assumed to be 8 m and 0~0.7 Hz in all cases for investigating the dynamic behaviors of the system.
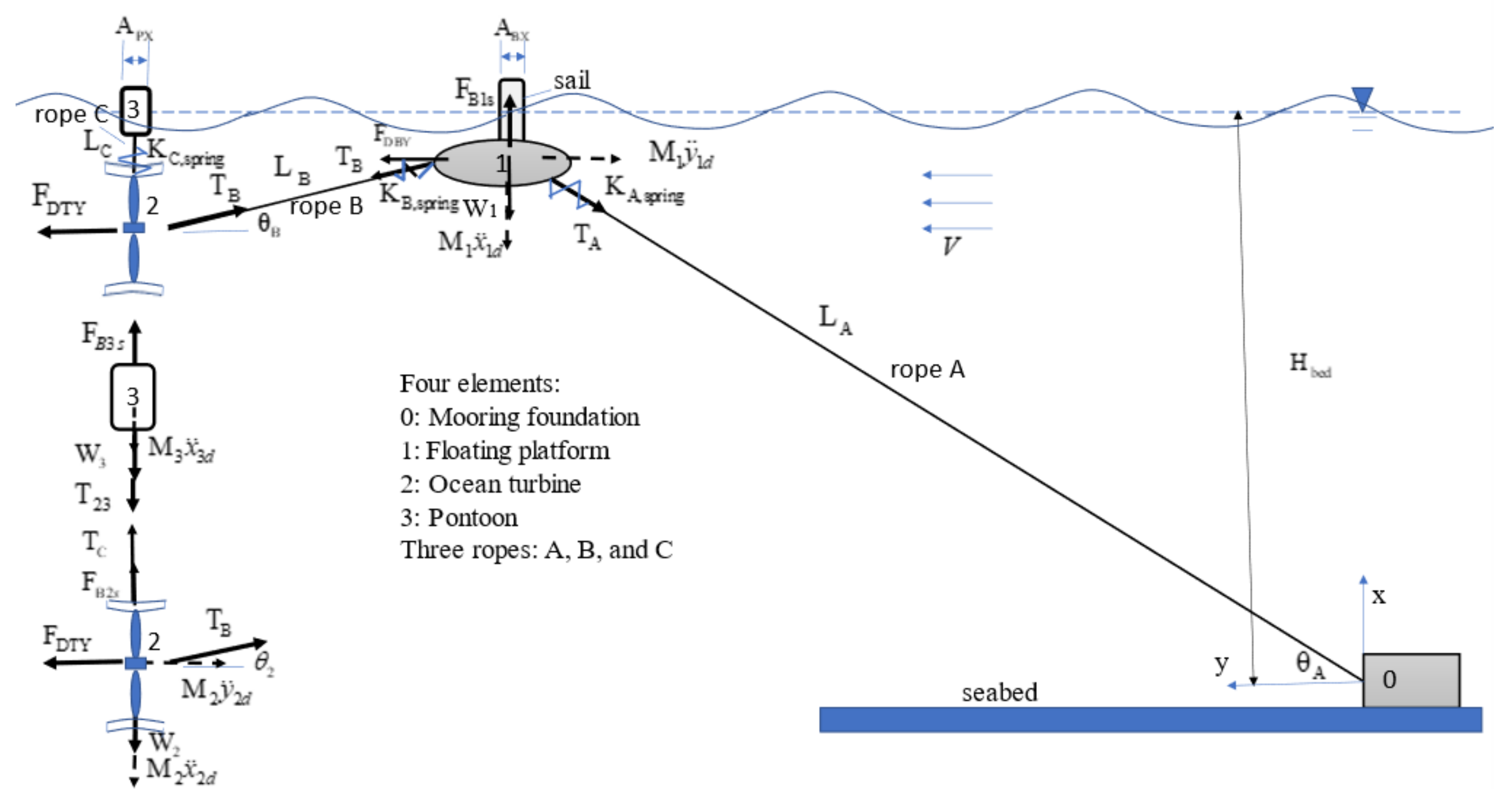
Consider the conditions in
Figure 4: (1) the depth of seabed
Hbed = 1300 m; (2) the cross-sectional area of surfaced sail of floating platform,
ABX = 8 m
2; (3) the cross-sectional area of pontoon connecting to turbine, A
PX = 1 m
2; (4) no buffer spring; (5) the ropes 1, 2, and 3 made of some commercial high-strength PE dyneema: Young’s modulus
E = 100 GPa, weight per unit length
fg = 16.22 kg/m, diameter
D = 154 mm, cross-sectional area
A = 0.0186 m
2, fracture strength
Tfracture = 759 tons; (6) the static diving depth of the turbine
LC = 60 m; (7) the inclined angle of the rope 2,
and the corresponding length
LB = 688.4 m; (8) the inclined angle of the rope 1,
, and the corresponding length
LA = 2600 m; (9) according to Equations (16), (21) and (25), the corresponding effective spring constants of the ropes 1, 2, and 3:
,
, and
; (10) the current velocity
V = 1 m/s; (11) the wave height and amplitude
HW = 8 m and
H0 = 4 m; (12) the masses of the turbine, floating platform, and pontoon:
,
, and
; (13) the effective masses of rope 1,
and
; (14) the cross-sectional area of floating platform and turbine,
and
; (15) the effective damping coefficients,
and
; (16) the static axial force to turbine
FDTs = 150 tons.
Figure 4a–d demonstrate the effects of wave frequency f and the wave phase
ϕ between two devices excited by a wave: (a) the floating platform, (b) the pontoon, on the dynamic tensions of ropes and the dynamic displacements of the floating platform, the pontoon, and the turbine. The relation among the phase
ϕ, wave length
λ, the distance between floating platform and pontoon
L4, and the relative orientation between current and wave
α is presented in Equation (12). Obviously, the phase
ϕ depends on the distance between the floating platform and pontoon
L4.
Figure 4a,b show the effects of wave frequency and phase on the dynamic tensions of ropes 1 and 2. It is found that the resonance frequency
f is 0.182 Hz, and the maximum dynamic tensions are
and
, which is less than the breaking strength
Tfracture = 759 tons. Moreover, the effect of phase is significant. When
f = 0.182 Hz and
ϕ = 0°, 180°, and 360°, the dynamic tensions are maximum.
Figure 4c shows that if,
ϕ = 0°, 180°, or 360°, the dynamic tension of the rope 3 is under the breaking strength
Tfracture. However, for other phases, the dynamic tension is over the breaking strength
Tfracture, especially for
ϕ~90° or 270°. The maximum tension
TCd,max = 11,411 tons.
Figure 4d shows the effect of wave frequency on the dynamic displacements
and
for
ϕ = 0° and 90°. Ιt is found that, for
ϕ = 0°, the elongation of rope 3,
is very small. Therefore, the corresponding dynamic tension,
, is small. However, at
ϕ = 90°, the elongation of the rope
C,
is very large. Therefore, the corresponding dynamic tension is very large. Moreover, it is well known that, if the turbine is more stable, its performance of power generation can be kept high easily. When
ϕ = 0°, the amplitudes of dynamic displacement of the turbine are very small. At the resonant wave frequency
f = 0.182 Hz, the amplitudes of dynamic displacement of the turbine are
and
. When
ϕ = 90°, the amplitudes of dynamic displacement of the turbine are negligible. In other words, this mooring system can keep, effectively, the stability of the turbine.
Because the dynamic tension of rope
C is very large, a buffer spring,
KC,spring =
Krope A, is connected in series with rope
C to reduce the effective spring constant to
. The other parameters are the same as those in
Figure 4. The effect of the buffer spring on the dynamic tensions and displacements is demonstrated in
Figure 5. At first, it is found that the two elongations of rope 3,
, at the phase
in
Figure 4d and
Figure 5d, are very close. This is because the effective spring constant to
, and the corresponding maximum dynamic tension
= 279.3 tons, which is less than the fracture strength of rope
Tfracture = 759 tons, as shown in
Figure 5c. In other words, the smaller the effective spring constant
KCd is, the smaller the dynamic tension
TCd is. Meanwhile, it is found in
Figure 5a,b that the effect of the buffer spring on the dynamic tensions of the ropes
and
is negligible. It is observed in
Figure 5d that, when
ϕ = 0°, the amplitudes of dynamic displacement of the turbine are very small. At the resonant wave frequency
f = 0.182 Hz, the amplitudes of dynamic displacement of the turbine are
and
. When
ϕ = 90°, the amplitudes of dynamic displacement of the turbine are negligible.
Figure 6 demonstrates the effect of wave height H
W on the maximum dynamic tensions
and
in the domains of wave frequency and phase,
and
. The inclined angle of rope 2,
. The corresponding length of rope
B,
LB = 345.5 m. The effective spring constants of the ropes
A,
B, and
C:
,
,
. The other parameters are the same as those in
Figure 4. It is found that the larger the wave height
HW is, the larger the maximum dynamic tensions are, especially for
.
Figure 7 demonstrates the effect of the area of pontoon A
PX on the maximum dynamic tensions
and
in the domains of wave frequency and phase
and
. Except the area of pontoon
APX, all the parameters are the same as those in
Figure 6. It is found that the larger the area of pontoon
APX is, the larger the maximum dynamic tensions are, especially for
.
Figure 8 demonstrates the effect of the cross-sectional area of sail
ABX on the maximum dynamic tensions
and
in the domains
and
. Except for the cross-sectional area of sail
ABX, all the parameters are the same as those in
Figure 5. It is found that the larger the cross-sectional area of sail
ABX is, the larger the maximum dynamic tensions
and
are, especially for
. However, the effect of the area of sail
ABX on the maximum dynamic tensions
is negligible.
Because the parameters
and
are the factors of external excitation, these are not related to the structure of system. The natural frequency of the system does not change with these parameters. It is verified in
Figure 4,
Figure 5 and
Figure 6 that there is no resonant shift during the variation of the parameters.
Figure 9 demonstrates the effect of the inclined angle
θ1 of rope 1 on the maximum dynamic tensions
and
in the domains
and
. Except for the inclined angle
θ1, the corresponding effective masses
and
, and the effective spring constant
, all the parameters are the same as those in
Figure 6. It is found that, if
, and the wave frequency is the resonant one and the phase
, the dynamic tensions
and
are over the fracture strength
Tfracture. However, if the inclined angle
is not in the neighbor of
, the wave frequency is not the resonant one, or the length
L4 is adjusted so that the phase
, the dynamic tensions
and
are less than the fracture strength
Tfracture. The larger the inclined angle
is, the larger the maximum dynamic tension
of rope
C is. Because the structure of system depends on the inclined angle
, the natural frequency of the system changes with the inclined angle
. There exists several resonant frequencies, as shown in
Figure 9.
Figure 10 demonstrates the effect of the inclined angle
θB of the rope
B on the maximum dynamic tensions
and
in the domains of wave frequency and phase
and
. Except for the inclined angle
θ2, the corresponding length of rope 2,
, and the effective spring constants,
,
, and
, all the parameters are the same as those in
Figure 6. It is found that the larger the inclined angle
is, the larger the maximum dynamic tensions
and
of ropes 1 and 2 are. Moreover, if
and the wave frequency is the resonant one and the phase
ϕ = 180°, the dynamic tensions
and
are over the fracture strength T
fracture. However, if the inclined angle
is not in the neighbor of
, and less than 11°, the dynamic tensions
and
are less than the fracture strength
Tfracture. The effect of the inclined angle
on the maximum dynamic tension
of rope
C is negligible.
Because the structure of the system depends on the inclined angle
, the natural frequency of the system changes with the inclined angle
. There exists several resonant frequencies, as shown in
Figure 10.
Figure 11 demonstrates the effect of the current velocity
V on the maximum dynamic tensions
and
in the domains of wave frequency and phase
and
. Except for the inclined angle
θ2 = 5°, the corresponding length of rope 2,
, and the effective spring constants,
,
, and
, all the parameters are the same as those in
Figure 5. Obviously, the second terms of Equations (37) and (40) are the damping force, for which the damping coefficient is composed of the parameters: (1) the damping coefficient, (2) the damping area, and (3) the current velocity
V. Due to this fact, the natural frequency of the system changes with the current velocity
V. Further, there exists several resonant frequencies, as shown in
Figure 11. Considering a buffer spring,
KC,spring =
Krope A, is connected in series with rope
C, if
and the wave frequency is the resonant one, and the phase
ϕ = 180°, the dynamic tensions
and
are over the fracture strength
Tfracture. However, if the current velocity
V is not the neighbor of
, the dynamic tensions
and
are less than the fracture strength
Tfracture. The effect of the current velocity
V on the maximum dynamic tension
of rope
C is negligible. Further, if two buffer springs are connected in series with ropes
B and
C, the dynamic tensions
and
at the resonance are significantly reduced.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}